Группа изобретений относится к органам управления рулевыми механизмами, устанавливаемыми на транспортных средствах, а именно к системам быстрой настройки подвески, предотвращающих опрокидывание транспортного средства [B60R 99].
Из уровня техники известно УСТРОЙСТВО МОДЕЛИРОВАНИЯ ОЩУЩЕНИЯ РУЛЕВОГО УПРАВЛЕНИЯ И РАСЧЕТА ПРОЙДЕННОГО РАССТОЯНИЯ ДЛЯ СИМУЛЯТОРА ВОЖДЕНИЯ [CN 107591053 A, опубл. 16.01.2018]. Устройство имитации ощущения рулевого управления и расчета хода, применяемое в автосимуляторе, характеризуется наличием первого трансмиссионного вала, второго трансмиссионного вала, рычага вилки, сенсорного имитатора и модуля сбора данных и управления. На первый трансмиссионный вал установлена первая прямозубая шестерня, на одном конце второго трансмиссионного вала установлена вторая прямозубая шестерня. Первая прямозубая шестерня входит в зацепление со второй прямозубой шестерней, и первая прямозубая шестерня и вторая прямозубая шестерня входят в зацепление друг с другом, образуя первую трансмиссию. Вал связан со вторым трансмиссионным валом. На другом конце второго трансмиссионного вала расположено эксцентричное колесо. В эксцентричном колесе есть скользящая канавка. Верхний конец стержня вилки шарнирно соединен с ведущим колесом. Ведущее колесо закреплено на одном конце второго трансмиссионного вала. При вращении эксцентричного колеса в его желобе приводится в движение ведущее колесо, а имитатор расположен на нижнем конце стержня вилки. На стержне вилки установлен тензометрический датчик, который через провод соединен с модулем сбора данных и управления.
Недостатком аналога является, что аналог предназначен для симулятора вождения и не может применяться для реального транспортного средства, ввиду чего не может обеспечить снижение вероятности опрокидывания транспортного средства во время прохождения поворота.
Из уровня техники известна ПЕРЕДНЯЯ ПОДВЕСКА СНЕГОХОДА В СБОРЕ С ПО МЕНЬШЕЙ МЕРЕ ОДНИМ ВЫСТУПОМ [RU 2543473 C2, опубл. 27.02.2015]. Снегоход, содержащий: раму, имеющую переднюю часть и заднюю часть; ведущую гусеницу, расположенную ниже задней части рамы; двигатель, установленный на раме; приводной механизм, функционально соединяющий двигатель с ведущей гусеницей для передачи тяговой мощности на ведущую гусеницу; узел передней подвески, имеющей правую сторону и левую сторону; пару лыж, функционально соединенных с правой и левой сторонами; причем каждая из правой и левой сторон содержит: верхний рычаг, имеющий, по меньшей мере, один элемент, дальний конец и ближний конец, причем ближний конец функционально соединен с рамой; нижний рычаг, функционально соединенный с рамой; шпиндель, имеющий верхнюю часть, содержащую шаровой шарнир, среднюю часть, функционально соединенную с нижним рычагом, и нижнюю часть, функционально соединенную с соответствующей одной лыжей из пары лыж; упомянутый дальний конец верхнего рычага содержит втулку, причем втулка принимает в себя шаровой шарнир, тем самым присоединяя верхнюю часть шпинделя к дальнему концу верхнего рычага; и, по меньшей мере, одну из правой или левой сторон, содержащую, по меньшей мере, один выступ, проходящий, в общем, вертикально вверх от втулки.
Недостатком аналога является отсутствие снижения вероятности опрокидывания транспортного средства во время прохождения поворота.
Наиболее близким по технической сущности является УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛА ПОВОРОТА РУЛЕВОГО КОЛЕСА И СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА РУЛЕВОГО КОЛЕСА ДЛЯ СИСТЕМЫ СБОРА ДАННЫХ ВОЖДЕНИЯ [CN 106839970 A, опубл. 13.06.2017]. Устройство для измерения угла поворота рулевого колеса для управления системой сбора данных характеризуется тем, что оно включает в себя корпус для измерения силы, тензометрический датчик и модуль сбора данных и управления, в котором силовой вал снабжен вал-шестерней, центральный вал вал-шестерни и вал транспортного средства соединены с валом рулевого колеса транспортного средства, вал-шестерня входит в зацепление с рейкой на стороне корпуса для измерения силы, тензометрическая коробка расположена на соответствующей стороне рейки, пружина оснащена пружиной, пружина соединена с рейкой, тензометрический датчик также соединен с модулем сбора данных и управления, а модуль сбора данных и управления может принимать и обрабатывать данные, передаваемые тензометрическим датчиком.
Основной технической проблемой прототипа является данная система предназначена для сбора и обработки данных от датчиков, при этом модуль сбора данных и управления не соединен с высокоскоростным модулем или иным, сходным по функционалу, устройством, оказывающим влияние на подвеску, ввиду чего можно сделать вывод, что прототип не оказывает влияния на снижение вероятности опрокидывания транспортного средства.
Задачей группы изобретений является устранение недостатков прототипа.
Технический результат группы изобретений заключается в снижении вероятности опрокидывания транспортного средства во время прохождения поворота.
Технический результат изобретения достигается за счет того, что система рулевого управления транспортного средства, содержащая передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчики, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненного с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской.
В частности, система содержит пружины, смонтированные к верхнему блоку и боковой пластине, а также к нижнему блоку и боковой пластине, при этом пружины выполнены с возможностью возвращения верхнего блока и нижнего блока в исходные положения.
В частности, к верхнему блоку и нижнему блоку смонтированы ограничители угла наклона.
В частности, система содержит фиксаторы, выполненные с возможностью фиксации верхнего блока или нижнего блока, или верхнего блока и нижнего блока в исходном положении.
Кроме того, технический результат достигается за счет того, что рулевая стойка транспортного средства с системой рулевого управления, содержащая руль, вал, рулевую тягу, передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчик, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, характеризующийся тем, что руль, соединенный с верхним блоком, а нижний блок соединен с валом, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненного с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской, а вал соединен с рулевыми тягами посредством рулевой сошки.
В частности, руль содержит стропу.
Кроме того, технический результат достигается за счет того, что снегоход с рулевой стойкой и системой рулевого управления, содержащий руль, вал, рулевую тягу, передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчик, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, характеризующийся тем, что руль, соединенный с верхним блоком, а нижний блок соединен с валом, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненного с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской, а вал соединен с рулевыми тягами посредством рулевой сошки.
Краткое описание чертежей.
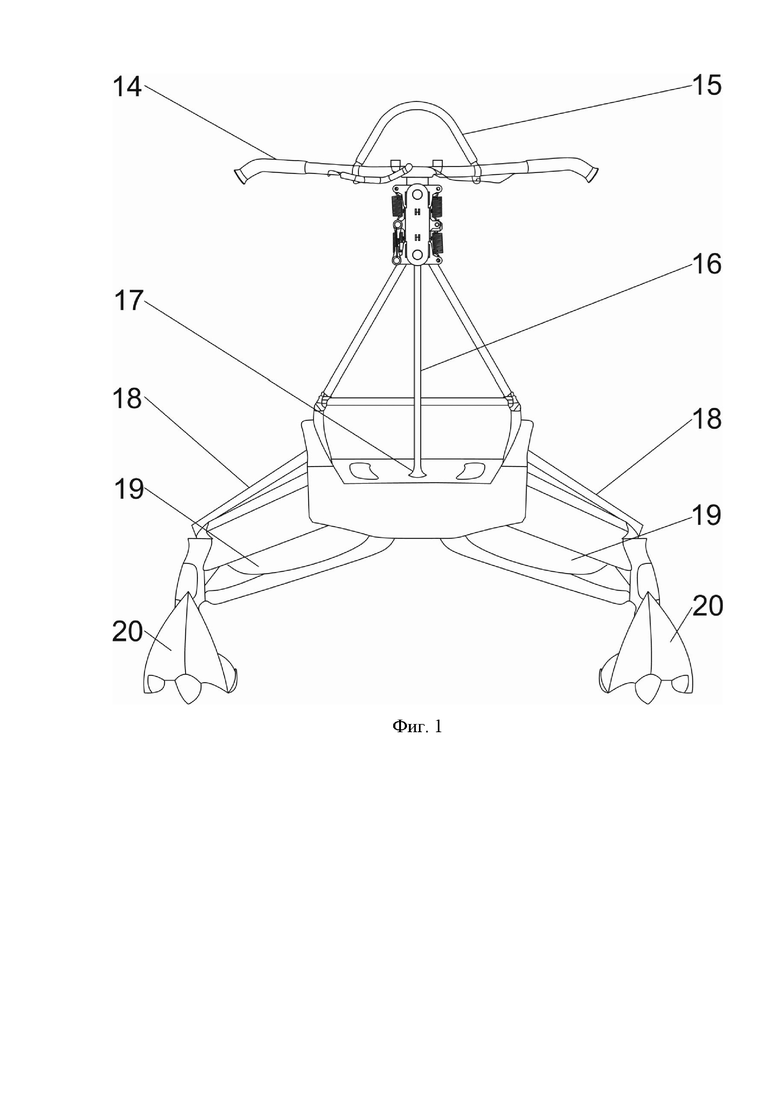
На фиг. 1 представлен снегоход со смонтированной стойкой, содержащей систему рулевого управления, общий вид.
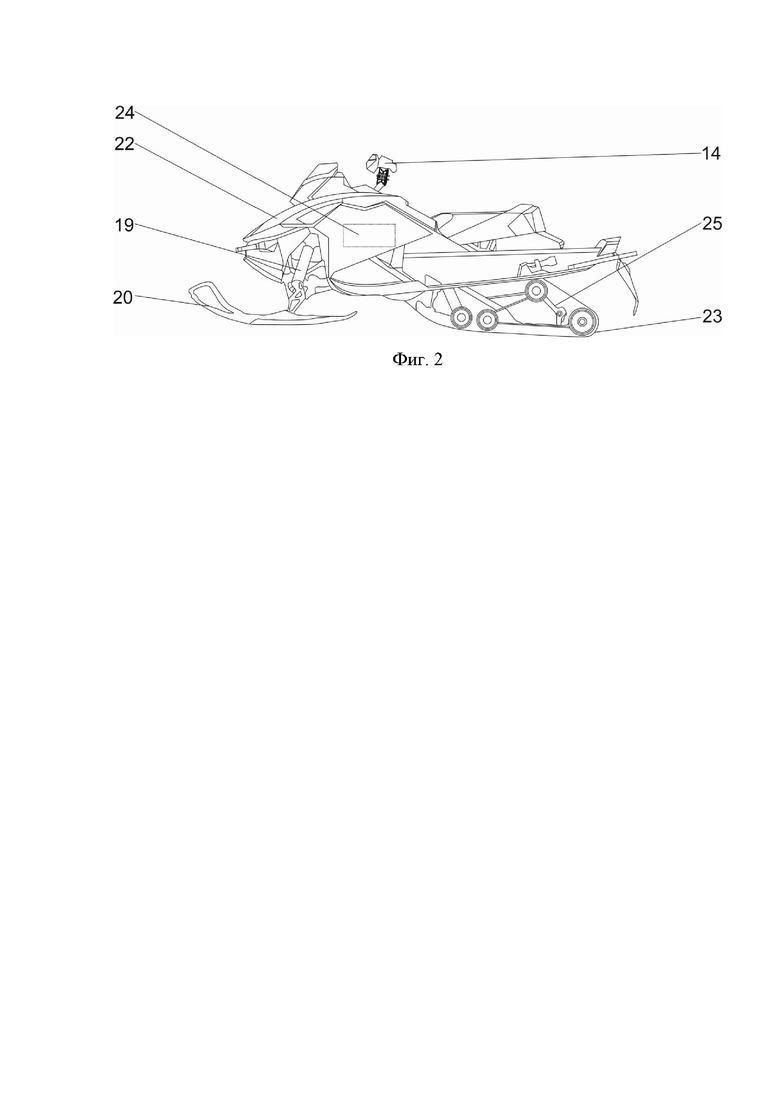
На фиг. 2 представлен снегоход со смонтированной стойкой, содержащей систему рулевого управления, вид сбоку.
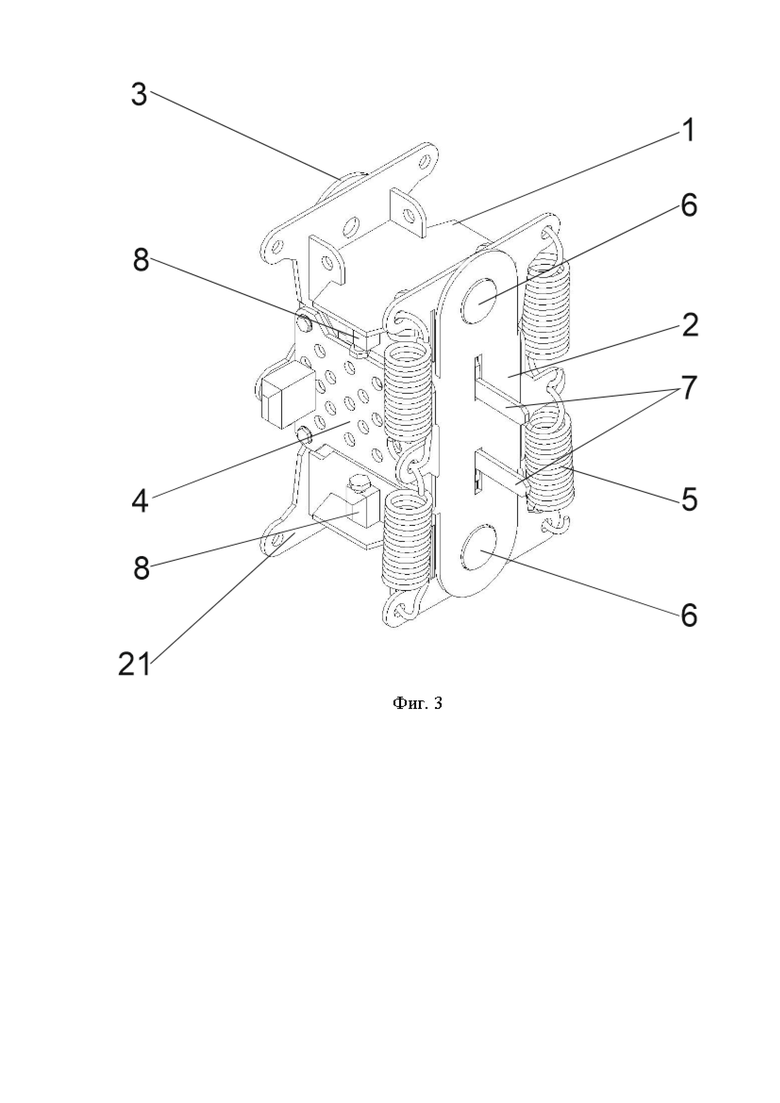
На фиг. 3 представлен общий вид системы рулевого управления.
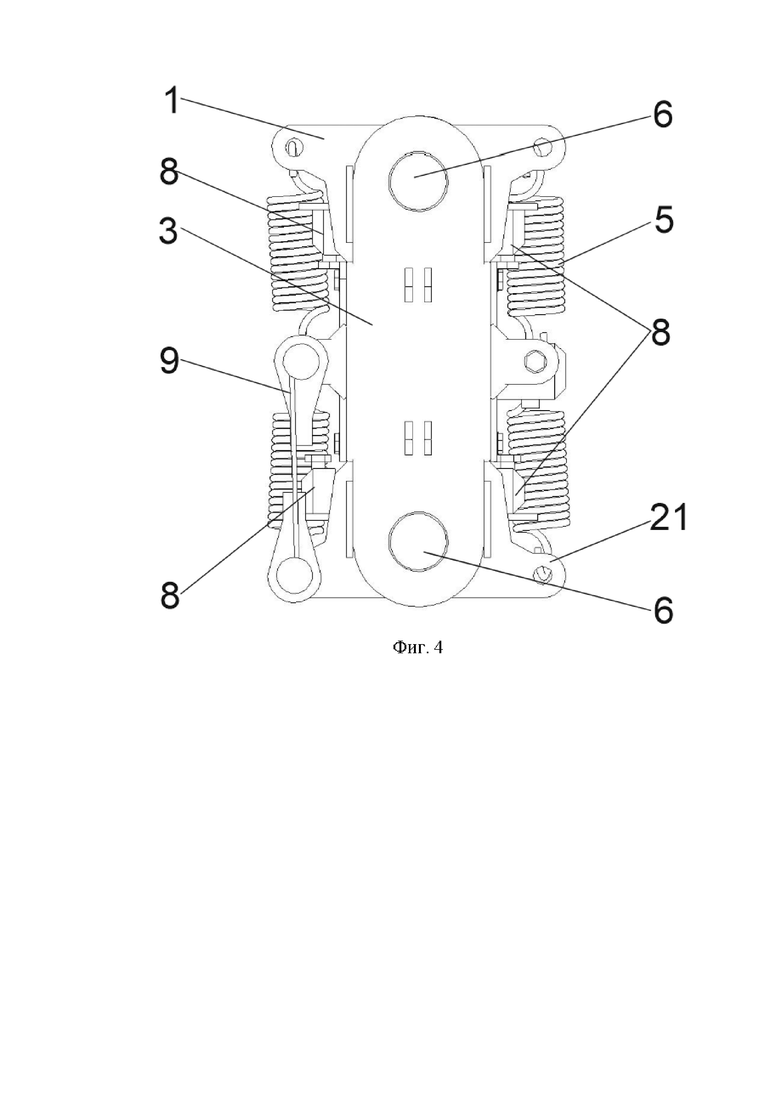
На фиг. 4 представлена система рулевого управления, вид сзади.
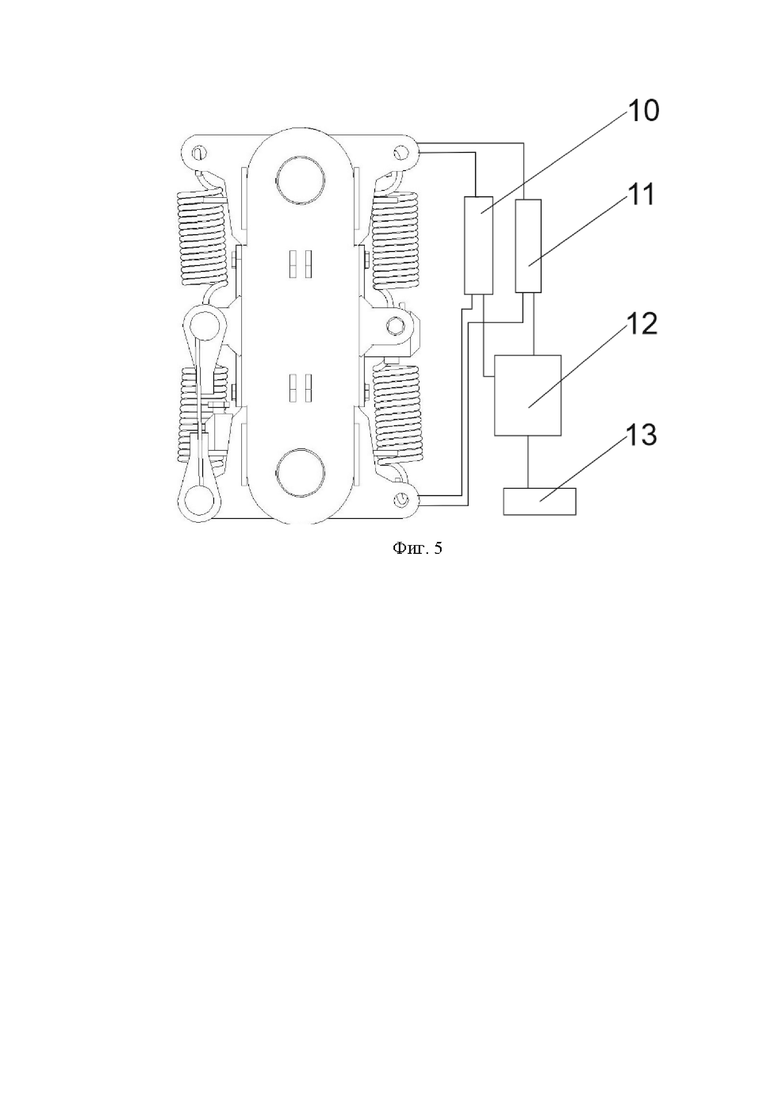
На фиг. 5 схематично представлено подключение компонентов к системе рулевого управления.
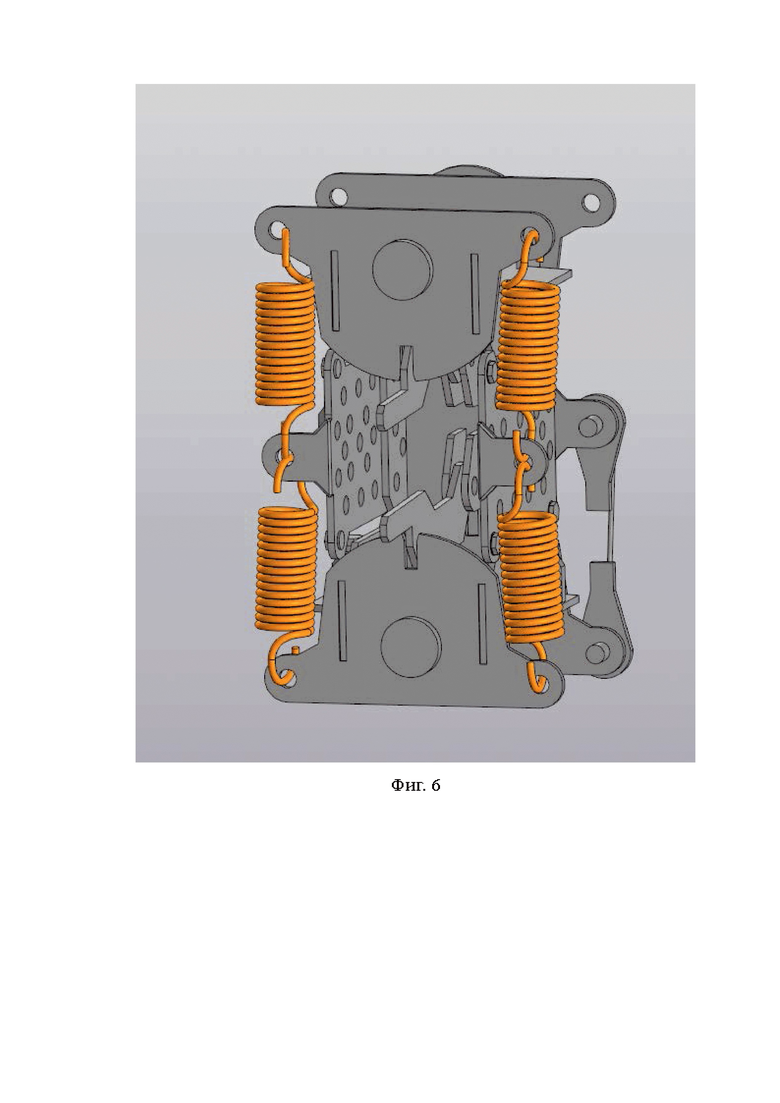
На фиг. 6 представлена система рулевого управления с демонтированным передним кронштейном.
На фиг. 7 представлен вариант реализации системы, смонтированной стойку снегохода.
На фигурах обозначено: 1 - верхний блок, 2 - передний кронштейн, 3 -задний кронштейн, 4 - боковая пластина, 5 - пружина, 6 - втулка, 7 - фиксатор, 8 - ограничитель наклона, 9 - тросик, 10 - тензодатчик, 11 - датчик угла наклона, 12 - электронный блок управления, 13 - высокоскоростной привод, 14 - руль, 15 - стропа, 16 - вал, 17 - рулевая сошка, 18 - рулевая тяга, 19 - подвеска, 20 - лыжи, 21 - нижний блок, 22 - кузов снегохода, 23 - гусеничная лента, 24 - двигатель снегохода, 25 - система подвески гусеничной ленты.
Настоящая группа изобретений реализуется посредством следующих технических средств.
Настоящая стойка рулевого управления предназначена для монтажа в систему рулевого управления следующих транспортных средств: снегоход, болотоход, квадроцикл, трицикл, багги, мотовездеход и гидроцикл.
Стойка рулевого управления содержит руль 14 со смонтированной стропой 15, причем к рулю 14 смонтирован верхний блок 1, например при помощи болтового соединения или сварки. Верхний блок 1 соединен с нижним блоком 21, а также соединен с валом 16, выполненным с возможностью передачи возвратно-поступательных движений от руля 14 на рулевую сошку 17, которая, в свою очередь, передает возвратно-поступательные движения на рулевые тяги 18, а рулевые тяги 18 передают возвратно-поступательные движения на лыжи 20.
Верхний блок 1 и нижний блок 21 выполнены п - образными, причем на торцах блоков выполнены пропилы, а по бокам выполнены проушины, имеющие сквозные отверстия.
Верхний блок 1 и нижний блок 21 шарнирно соединены с передним кронштейном 2 и задним кронштейном 3 посредством втулок 6.
Передний кронштейн 2 и задний кронштейн 3 соединены между собой боковой пластиной 4, по бокам которой выполнены проушины, имеющие сквозные отверстия.
К верхнему блоку 1 и нижнему блоку 21 с обеих сторон смонтированы ограничители угла наклона 8, выполненные с возможностью определения конечных положений руля и конечных положений датчиков (датчика угла наклона 11 и тензодатчика 10), а также выполненные с возможностью регулировки.
В качестве тензодатчиков 10 может быть использованы пленочные тензодатчики или проволочные тензодатчики, или фольгированные тензодатчики, или полупроводниковые тензодатчики, или резистивные тензодатчики, или тензорезистивные тензодатчики.
В качестве датчиков угла наклона 11 может быть использован гироскопические датчики или ультразвуковые датчики, или оптические датчики, или магнитные датчики, или инклинометрические датчики, или акселерометрические датчики.
В переднем кронштейне 2 выполнены отверстия, внутрь которых смонтирован фиксатор 7, причем фиксатор 7 шарнирно соединен с задним кронштейном 3. Фиксатор 7 выполнен с возможностью фиксации внутри пропилов, выполненных в верхнем блоке 1 и нижнем блоке 21, в следствие чего происходит фиксация блоков 1 и 21.
В сквозные отверстия, выполненные в проушинах верхнего блока 1 и нижнего блока 21, и боковой пластины 4 смонтированы пружины 5, выполненные в виде предварительно напряженных пружин сжатия или пружин растяжения, или пружин кручения, или в виде электромагнитных пружин. Пружины 5 выполнены с возможностью возврата корпуса блока 1 в изначальное положение. Также в сквозные отверстия смонтирован тросик 9, выполненный с возможностью механической связи блока 1 или 21 или блоков 1 и 21, и лыж 9.
Также в сквозные отверстия, напротив пружин 5, подключены выводы тензодатчика 10, выполненного с возможностью измерения силы воздействия водителя на руль 14 и передачи измеренных значений в электронный блок управления 12, также подключены выводы датчика угла наклона 11 выполненного с возможностью измерения угла отклонения руля от исходного положения, а также измерения скорости изменения угла отклонения руля от исходного положения и передачи измеренных значений в электронный блок управления 12, а электронный блок управления 12, выполнен с возможностью формирования управляющего сигнала для высокоскоростного привода 13, смонтированного в подвеску 19, причем высокоскоростной привод 13 выполнен с возможностью рассинхронизированного управления подвеской 19.
Подвеска 19 выполнена в виде телескопической подвески или в виде рычажной подвески, при этом подвеска 19 содержит упругий элемент, например пружину или рессору, или амортизатор.
Поверх стойки управления может быть смонтирован защитный кожух, причем в качестве материала изготовления кожуха может быть использован сплав металлов и/или пластик, и/или полимерный состав, и/или композитный состав, и/или древесина.
Так, например данная стойка рулевого управления может быть смонтирована на снегоход (фиг. 2), содержащий двигатель снегохода 24, кузов снегохода 22, включающий в себя раму снегохода, подвеску 19, лыжи 20, гусеничную ленту 23, смонтированную на систему гусеничной подвески 25.
Алгоритм работы стойки рулевого управления снегоходом:
Датчики (тензодатчик и датчик угла наклона) начинают измерять показатели в момент тяги руля в сторону создания крена (например в момент правового или левого поворота). При этом, измеряется сила нажатия на руль, угол отклонения руля от изначального положения, а также скорость приложенного усилия, после чего измеренные значения передают в электронный блок управления, после чего формируют управляющий сигнал и передают его на подвеску через высокоскоростной привод и производят регулировку жесткости подвески.
Так, например при необходимости поворота на лево водитель снегохода наклоняет руль влево, тензодатчик измеряет силу с которой воздействуют на руль, а датчик угла наклона измеряет угол отклонения руля от изначального положения и скорость изменения угла, после чего измеренные значения передают в электронный блок управления, а затем передают на подвеску через высокоскоростной привод. Так, подвеска, смонтированная с левой стороны снегохода получает управляющий сигнал об изменении жесткости подвески на более мягкую, вследствие чего снижается клиренс с левой стороны снегохода, а также уменьшается подъемная сила, при этом подвеска, смонтированная на правую сторону снегохода получает управляющий сигнал об изменении жесткости подвески на более жесткую и, как результат, увеличивается клиренс с правой стороны, а также подъемная сила. Ввиду разности подъемных сил и клиренса происходит поворот снегохода на лево. После совершения маневра (поворота налево) водитель снегохода выравнивает руль, при этом жесткость подвески справа и слева становится одинаковой, также выравнивается клиренс и подъемная сила и снегоход продолжает движение прямолинейно.
Без использования настоящей стоки управления на снегоходе поворот снегохода в глубоком снегу осуществляется при помощи переноса массы тела, а перенос массы тела создает крен (отклонение центра тяжести снегохода от центра масс), что требует приложения больших физических усилий, однако ввиду того, что масса снегохода превышает массу водителя в несколько раз, то поворот снегохода в глубоком снегу при помощи переноса массы тела может быть осуществлен с некоторой вероятностью, то есть осуществление поворота в глубоком снегу не всегда является возможным. При этом дополнительное сопротивление повороту, осуществляемого при помощи переноса массы тела, оказывается со стороны гусеницы снегохода.
При этом, если управление снегоходом происходит:
1. Когда водитель снегохода держится левой рукой за левую ручку руля, а правой рукой за правую ручку руля, то измерение силы воздействия на руль и угол наклона руля производят датчики, смонтированные к верхнему блоку. При этом, если верхний блок находится в крайнем положении (крайнее правое положение или крайнее левое положение), так как дальнейшему движению препятствует ограничитель угла наклона, то для измерения силы воздействия водителя снегохода на руль, угла наклона руля и скорости изменения угла производят как датчики, смонтированные к верхнему блоку, так и к нижнему блоку, при этом работа осуществляется совместно.
2. Когда водитель снегохода держится одной рукой за ручку руля, а другой рукой за стропу, ввиду малого плеча воздействия датчики, смонтированные к верхнему блоку не задействованы, а измерение силы воздействия на руль и угол наклона руля производят датчики, смонтированные к нижнему блоку.
Так, например, при движении вдоль склона на снегоходе, со смонтированной настоящей стойкой рулевого управления, происходит регулировка подвески таким образом, что появляется возможность движения вдоль склона без применения контрруления, при этом настоящая стойка рулевого управления также позволяет избежать контрруления снегоходом при повороте налево/направо в глубоком снегу.
Настоящая стойка рулевого управления, смонтированная на снегоход, позволяет избежать как контрруления и главного недостатка контрруления - наезда на препятствие, скрытое снегом. В качестве такого препятствия могут выступать ветки, камни, бревна и прочее. В момент контрруления, создается крен снегохода и лыжа направлена в направлении отличном от направления движения снегохода. Встреча с невидимыми под снегом препятствиями происходит не передней частью лыжи, имеющей поднятую вверх, скругленную часть лыжи, предназначенной для преодолевания препятствий, а боковой прямой поверхностью лыжи не приспособленной для преодолевания препятствий. Вследствие чего происходит деформация или поломка лыжи, деталей подвески, элементов кузова при опрокидывании снегохода. При этом появляется высокая вероятность получить травмы как водителю снегохода, так и пассажиру.
Настоящая стойка рулевого управления снегоходом выполнена с возможностью работы в трех режимах:
1. Все датчики активны.
2. Тензодатчики активны и считывают силу воздействия водителя снегохода на руль, а датчик угла наклона отключен/неактивен, при этом верхний блок или нижний блок механически заблокирован при помощи фиксатора.
3. Система неактивна, тензодатчик отключен/неактивен, датчик угла наклона отключен/неактивен, при этом верхний блок и нижний блок механически заблокированы при помощи фиксатора.
Пример осуществления изобретения.
В варианте реализации верхний блок, передний кронштейн, задний кронштейн, боковые пластины, нижний блок, фиксаторы, части верхнего и нижнего блоков были выполнены из сплава, имеющего следующий состав (табл. 1):
Таблица 1 - Состав сплава.
Данный сплав был использован в виде листов толщиной 3 мм и 6 мм из которого, посредством лазерной резки на станке оптоволоконной лазерной резки OREE LASER FM3015A Raycus 6000W, были вырезаны данные детали, после чего грани каждой детали были обработаны на ленточном гриндере ГЧ-16, посредством абразивной ленты, изготовленной из БАЗ TD-25363, имеющей зернистость Р100.
При этом детали имеют следующие размеры (табл. 2):
Таблица 2 - Размеры деталей.
При этом в переднем и заднем кронштейне сделаны отверстия диаметром 25 мм, выполненные с возможностью соединения с втулкой.
Также на аналогичном станке OREE LASER FM3015A Raycus 6000W вырезаны детали для верхнего и нижнего блоков, которые были сварены между собой.
В качестве пружины использовалась пружина растяжения (до 100 кг, имеющая размеры 3*23*95).
Втулка выполнена из полиамида, а именно из ПА 66-ЛГ-10 ТУ 6-06-134-2016, гранулы которого предварительно спекли в единый цилиндр, остывавший под вакуумом, после чего цилиндр обточили на токарном станке с числовым программным управлением REALREZ СК0640 под следующие размеры: диаметр втулки - 25 мм, а толщина втулки - 5 мм.
В боковом кронштейне было сделано 26 отверстий диаметром 4 мм.
Ограничитель наклона выполнен в виде штока с пяткой, длиной 10 см, на внешней поверхности которого нарезана резьба М6 и сваренных между собой 4 гаек М6.
Тросик выполнен в виде металлического многожильного троса, длиной 1,5 метра, причем на тросик нанесено прорезиненное покрытие.
В качестве тензодатчика использовался К-Р16Г.
В качестве датчика угла наклона использовался ЭСКОРТ DU-BLE.
В качестве электронного блока управления использовался arduino nano 22 BLE rev2.
В качестве высокоскоростного привода использовался 45200-02211 Toyota.
Таким образом: передний и задний кронштейн были соединены посредством отверстий, сформированных в боковой пластине, а именно посредством болтового соединения, а верхний и нижний блоки были смонтированы к переднему и заднему кронштейну шарнирно, посредством втулок, при этом к проушинам верхнего и нижнего блока смонтированы тензодатчики К-Р16Г и датчики угла наклона ЭСКОРТ DU-BLE, а между проушинами верхнего блока, нижнего блока и боковой пластины смонтированы пружины растяжения, а между проушиной боковой пластины и нижнего блока смонтирован тросик. При этом на верхний и нижний блоки, с двух сторон, смонтированы ограничители наклона.
Соответствующие функции электронного блока управления были прописаны программным путем на языке Python. Ниже приведена часть кода, который демонстрирует базовую логику работы (описание полного исходного кода не имеет большого смысла):
import rospy
from sensor_msgs.msg import Joy
from std_msgs.msg import Float32
class SnowmobileControl:
def __init__(self):
self.left_force = 0.0
self.right_force = 0.0
self.left_angle = 0.0
self.right_angle = 0.0
self.left_force_pub = rospy.Publisher('/left_force', Float32, queue_size=10)
self.right_force_pub = rospy.Publisher('/right_force', Float32, queue_size=10)
self.left_angle_pub = rospy.Publisher('/left_angle', Float32, queue_size=10)
self.right_angle_pub = rospy.Publisher('/right_angle', Float32, queue_size=10)
rospy.Subscriber('/joy', Joy, self.joy_callback)
def joy_callback(self, data):
if data.axes[0] != 0.0 and data.axes[1] != 0.0:
# Using sensors mounted to the upper block
self.left_force = # read left force from sensor mounted to upper block
self.right_force = # read right force from sensor mounted to upper block
self.left_angle = # read left angle from sensor mounted to upper block
self.right_angle = # read right angle from sensor mounted to upper block
else:
# Using sensors mounted to the lower block
self.left_force = # read force from sensor mounted to lower block
self.right_force = # read force from sensor mounted to lower block
self.left_angle = # read angle from sensor mounted to lower block
self.right_angle = 0.0
self.left_force_pub.publish(self.left_force)
self.right_force_pub.publish(self.right_force)
self.left_angle_pub.publish(self.left_angle)
self.right_angle_pub.publish(self.right_angle)
Описанный выше вариант реализации был смонтирован на снегоход BRP Lynx 69 Yeti 600 ACE, соответственно в качестве руля, стропы, вала, рулевой сошки, рулевой тяги, лыж использовались части, поставляемые со снегоходом заводом-изготовителем.
При этом штатная подвеска от снегохода BRP Lynx 69 Yeti 600 ACE была доработана следующим образом: увеличен ход штоков подвески, а также доработан узел управления жесткостью подвески.
Система рулевого управления, описанная выше была смонтирована между валом и рулем посредством болтового соединения, при этом монтаж осуществлялся с соблюдением следующих правил: относительно руля система рулевого управления должна находится под углом 90 градусов (погрешность 10±5 минут), а относительно вала система должна находится под углом 0 градусов (погрешность 5±3 минуты).
После чего на снегоходе был проведен ряд испытаний, а именно было произведено 10 поворотов под каждым из следующих углов: 30 градусов, 45 градусов, 60 градусов, 90 градусов, разворот (поворот на 180 градусов).
Ниже в таблице 3 приведена статистика об опрокидывании транспортного средства, а именно снегохода BRP Lynx 69 Yeti 600 ACE, без настоящего изобретения и со смонтированным настоящим изобретением.
При этом скорость вхождения в поворот была каждый раз примерно одинаковой (от 43 км/час до 46 км/час).
Каждый из поворотов был длиной 100 метров.
Таблица 3 - Количество опрокидываний транспортного средства во время поворота на определенный градус.
При этом настоящее изобретение было также испытано на болотоходе.
А именно настоящее устройство было смонтировано в рулевую стойку болотохода АГ-20, а в качестве высокоскоростного привода использовалась система принудительного скручивания рамы относительно горизонтальной оси вращения.
В результате совместного взаимодействия настоящей системы и системы принудительного скручивания рамы относительно горизонтальной оси вращения достигается эффект «шагающего» болотохода во время езды, что позволяет с легкостью преодолевать торфяные ямы и болота.
Эксперименты с опытным образцом показали, что количество опрокидываний транспортного средства во время прохождения поворота в 30 градусов снизилось с 3 раз из 10 до 0 раз из 10, количество опрокидываний транспортного средства во время прохождения поворота в 45 градусов снизилось с 5 раз из 10 до 1 раза из 10, количество опрокидываний транспортного средства во время прохождения поворота в 60 градусов снизилось с 5 раз из 10 до 1 раза из 10, количество опрокидываний транспортного средства во время прохождения поворота в 90 градусов снизилось с 7 раз из 10 до 2 раз из 10, а количество опрокидываний транспортного средства во время прохождения поворота в 45 градусов снизилось с 8 раз из 10 до 2 раз из 10, то есть, настоящее изобретение снижает вероятность опрокидывания транспортного средства во время прохождения поворота минимум в 3 раза.
Необходимость данной группы изобретения заключается в том, что использование транспортных средств для передвижения по местности не оборудованной асфальтированным покрытием или иным покрытием, пригодным для безопасной езды, несет риски получения травм, увечий, иногда, к сожалению, несовместимых с жизнью, настоящая группа изобретений призвана снизить вероятность возникновения данных инцидентов, причем как для использования новичками (людьми, которыми только начинают постигать путь езды по бездорожью (Off-road), так и для профессионалов.
Таким образом, за счет того, что система рулевого управления транспортного средства, содержащая передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчики, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненного с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской, кроме того, за счет того, что рулевая стойка транспортного средства с системой рулевого управления, содержащая руль, вал, рулевую тягу, передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчик, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, характеризующийся тем, что руль, соединенный с верхним блоком, а нижний блок соединен с валом, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненного с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской, а вал соединен с рулевыми тягами посредством рулевой сошки, кроме того за счет того, что снегоход с рулевой стойкой и системой рулевого управления, содержащий руль, вал, рулевую тягу, передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчик, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, характеризующийся тем, что руль, соединенный с верхним блоком, а нижний блок соединен с валом, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненного с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской, а вал соединен с рулевыми тягами посредством рулевой сошки обеспечивается такой технический результат как снижение вероятности опрокидывания транспортного средства во время прохождения поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СНЕГОХОД | 2009 |
|
RU2517918C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2636249C2 |
| Подвеска рулевой лыжи снегохода | 2018 |
|
RU2691490C1 |
| СНЕГОХОД-ТРАНСФОРМЕР | 2010 |
|
RU2442716C1 |
| ПОДВЕСКА РУЛЕВОЙ ЛЫЖИ СНЕГОХОДА | 1990 |
|
RU2043232C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749924C1 |
| Система контроля положения лыжи для движения двухколесного транспортного средства по снегу | 2018 |
|
RU2738397C2 |
| ТОПЛИВНЫЙ БАК И РАМА ДЛЯ СНЕГОХОДА | 2014 |
|
RU2673440C2 |
| ТОПЛИВНЫЙ БАК СНЕГОХОДА | 2015 |
|
RU2687394C2 |
| СНЕГОХОД | 2013 |
|
RU2719265C2 |

Группа изобретений относится к области машиностроения, к органам управления рулевыми механизмами, а именно к системам быстрой настройки подвески. Система рулевого управления транспортного средства, содержащая передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчики, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненному с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской. Достигается снижение вероятности опрокидывания транспортного средства во время прохождения поворота. 3 н. и 4 з.п. ф-лы, 7 ил., 3 табл.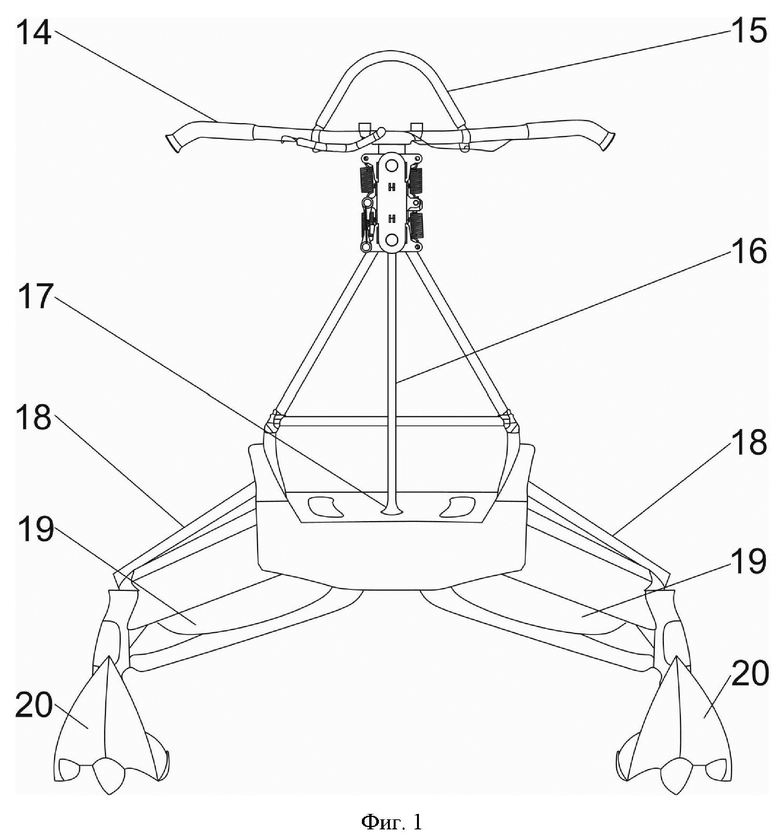
1. Система рулевого управления транспортного средства, содержащая передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчики, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненному с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской.
2. Система по п.1, отличающаяся тем, что содержит пружины, смонтированные к верхнему блоку и боковой пластине, а также к нижнему блоку и боковой пластине, при этом пружины выполнены с возможностью возвращения верхнего и нижнего блоков в исходные положения.
3. Система по п.1, отличающаяся тем, что к верхнему блоку и нижнему блоку смонтированы ограничители угла наклона.
4. Система по п.1, отличающаяся тем, что содержит фиксаторы, выполненные с возможностью фиксации верхнего блока или нижнего блока, или верхнего блока и нижнего блока в исходном положении.
5. Рулевая стойка транспортного средства с системой рулевого управления, содержащая руль, вал, рулевую тягу, передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчик, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, характеризующаяся тем, что руль соединён с верхним блоком, а нижний блок соединён с валом, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненному с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской, а вал соединён с рулевыми тягами посредством рулевой сошки.
6. Рулевая стойка по п.5, отличающаяся тем, что руль содержит стропу.
7. Снегоход с рулевой стойкой и системой рулевого управления, содержащий руль, вал, рулевую тягу, передний кронштейн, задний кронштейн, верхний блок, нижний блок, боковые пластины, тензодатчик, датчик угла наклона, электронный блок управления, высокоскоростной привод и подвеску, характеризующийся тем, что руль соединён с верхним блоком, а нижний блок соединён с валом, при этом верхний блок и нижний блок, выполненные п-образными, шарнирно соединены с передним кронштейном и задним кронштейном посредством втулок, а передний кронштейн и задний кронштейн соединены между собой при помощи боковых пластины, при этом тензодатчики и датчики угла наклона смонтированы как к верхнему блоку, так и к нижнему блоку, также тензодатчики и датчики угла наклона подключены к электронному блоку управления, выполненному с возможностью формирования управляющего сигнала для управления высокоскоростным приводом, выполненным с возможностью управления подвеской, а вал соединён с рулевыми тягами посредством рулевой сошки.
| CN 106839970 A, 13.06.2017 | |||
| CN 107591053 A, 16.01.2018 | |||
| СНЕГОХОД, ИМЕЮЩИЙ УЗЕЛ ПЕРЕДНЕЙ ПОДВЕСКИ С, ПО МЕНЬШЕЙ МЕРЕ, ОДНИМ ВЫСТУПОМ | 2010 |
|
RU2543473C2 |
| СНЕГОХОД | 2008 |
|
RU2416542C2 |

