Область техники
[0001] Настоящее изобретение относится к системе рулевого управления транспортного средства, установленной на транспортном средстве.
Уровень техники
[0002] В качестве системы рулевого управления транспортного средства (в дальнейшем в этом документе может называться «поперечно независимой системой рулевого управления»), содержащей пару устройств руления узлом «колесо-шина», которые могут независимо рулить правым и левым узлами «колесо-шина», например, предусмотрена технология, описанная в публикации не прошедшей экспертизу заявки на патент Японии № 2009-101858 (JP 2009-101858 А). В вышеуказанной технологии, устойчивость поведения при повороте транспортного средства повышается на основе поперечной силы, действующей на каждый узел «колесо-шина», и скорости вращения узла «колесо-шина» для каждого узла «колесо-шина» (в дальнейшем в этом документе может называться просто «скоростью вращения узла «колесо-шина»»).
Сущность изобретения
[0003] Поперечно независимая система рулевого управления по-прежнему разрабатывается, и имеется существенный запас для улучшения, в частности, относительно управления рулением правых и левых узлов «колесо-шина». Следовательно, посредством внесения улучшений, можно повышать практичность поперечно независимой системы рулевого управления. Настоящее изобретение предоставляет очень практичную поперечно независимую систему рулевого управления.
[0004] Первый аспект настоящего изобретения относится к системе рулевого управления транспортного средства. Система рулевого управления транспортного средства включает в себя первое устройство руления узлом «колесо-шина», выполненное с возможностью рулить левым узлом «колесо-шина» транспортного средства, второе транспортное средство, выполненное с возможностью рулить правым узлом «колесо-шина» транспортного средства и контроллера. Контроллер выполнен с возможностью определять целевое положение руления, которое представляет собой положение руления, намеченное для реализации в каждом из правого узла «колесо-шина» и левого узла «колесо-шина», на основе запроса на руление в транспортное средство, и выполнен с возможностью управлять первым устройством руления узлом «колесо-шина» и вторым устройством руления узлом «колесо-шина» таким образом, что положение руления каждого из правого узла «колесо-шина» и левого узла «колесо-шина» совпадает с целевым положением руления. Контроллер выполнен с возможностью выполнять, когда индекс поворота, указывающий серьезность поворота, превышает заданное пороговое значение, процесс изменения положения руления для изменения положения руления одного из правого узла «колесо-шина» и левого узла «колесо-шина» таким образом, что характеристики поворачиваемости транспортного средства имеют более сильную тенденцию к недостаточной поворачиваемости по сравнению со случаем, в котором индекс поворота не превышает заданное пороговое значение.
[0005] В системе рулевого управления транспортного средства (в дальнейшем в этом документе может называться просто «системой рулевого управления») согласно первому аспекту настоящего изобретения, когда серьезный поворот выполняется, выполняется процесс изменения положения руления, который повышает устойчивость при повороте транспортного средства.
[0006] «Серьезный поворот» в первом аспекте, например, означает поворот, на котором центробежная сила, действующая на кузов транспортного средства во время поворота, является большой, т.е. поворот с небольшим радиусом поворота, который выполняется на высокой скорости движения транспортного средства. Таким образом, например, поперечное ускорение, сгенерированное в кузове транспортного средства, угловая скорость относительно вертикальной оси транспортного средства и т.п. может приспосабливаться в качестве «индекса поворота» для указания серьезности поворота. Кроме того, при серьезном повороте, относительно большая разность возникает между нагрузками кузова транспортного средства, разделенными посредством правых и левых узлов «колесо-шина», т.е. между разделенными нагрузками кузова транспортного средства правых и левых узлов «колесо-шина», так что разность между разделенными нагрузками кузова транспортного средства (в дальнейшем в этом документе может называться «разностью разделенных нагрузок») также может приспосабливаться в качестве индекса поворота. Кроме того, по мере того, как разделенная нагрузка транспортного средства увеличивается, сила поворота при рулении, которая представляет собой силу для руления узлом «колесо-шина», а именно, удерживающая сила руления, которая представляет собой силу поворота при рулении, требуемую для того, чтобы поддерживать положение руления узла «колесо-шина» в целевом положении руления, увеличивается. С учетом этого, разность между силами поворота при рулении, прикладываемыми к правым и левым узлам «колесо-шина» во время поворота (в дальнейшем в этом документе может называться «разностью сил поворота при рулении»), может приспосабливаться в качестве индекса поворота.
[0007] В первом аспекте, один из правого узла «колесо-шина» и левого узла «колесо-шина» может представлять собой внешний поворотный узел «колесо-шина».
[0008] В первом аспекте, транспортное средство может иметь четыре узла «колесо-шина», включающих в себя правый передний, левый передний, правый задний и левый задний узлы «колесо-шина», и правый узел «колесо-шина» и левый узел «колесо-шина» могут представлять собой правый передний узел «колесо-шина» и левый передний узел «колесо-шина». Контроллер может быть выполнен с возможностью задавать положение руления одного из правого переднего узла «колесо-шина» и левого переднего узла «колесо-шина» меньшим в процессе изменения положения руления.
[0009] В первом аспекте, транспортное средство может иметь четыре узла «колесо-шина», включающих в себя правый передний, левый передний, правый задний и левый задний узлы «колесо-шина», и правый узел «колесо-шина» и левый узел «колесо-шина» могут представлять собой правый и левый задние узлы «колесо-шина». Контроллер может быть выполнен с возможностью задавать положение руления одного из правого заднего узла «колесо-шина» и левого заднего узла «колесо-шина» большим в процессе изменения положения руления.
[0010] В первом аспекте, контроллер может быть выполнен с возможностью управлять силами поворота при рулении, сгенерированными посредством первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина», чтобы осуществлять управление таким образом, что положение руления каждого из правого узла «колесо-шина» и левого узла «колесо-шина» совпадает с целевым положением руления.
[0011] В первом аспекте, первое устройство руления узлом «колесо-шина» может включать в себя первый электромотор, служащий в качестве источника приведения в движение, и первый механизм преобразования движения, выполненный с возможностью преобразовывать движение первого электромотора в движение при рулении узла «колесо-шина». В первом аспекте, второе устройство руления узлом «колесо-шина» может включать в себя второй электромотор, служащий в качестве источника приведения в движение, и второй механизм преобразования движения, выполненный с возможностью преобразовывать движение второго электромотора в движение при рулении узла «колесо-шина». Контроллер может быть выполнен с возможностью управлять питающим током в каждый из первого электромотора и второго электромотора, чтобы управлять силами поворота при рулении, сгенерированными посредством первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина». В такой системе рулевого управления, вместо разности сил поворота при рулении, разность между мощностью, прилагаемой посредством первого электромотора первого устройства руления узлом «колесо-шина», и мощностью, прилагаемой посредством второго электромотора второго устройства руления узлом «колесо-шина» (в дальнейшем в этом документе может называться «мощностью электромотора»), либо разность между питающим током, подаваемым в первый электромотор первого устройства руления узлом «колесо-шина», и питающим током, подаваемым во второй электромотор второго устройства руления узлом «колесо-шина», может приспосабливаться в качестве индекса поворота. Например, когда разность мощности электромотора или разность питающего тока приспосабливается в качестве индекса поворота, специальный датчик, такой как датчик поперечного ускорения или датчик угловой скорости относительно вертикальной оси, не требуется, в отличие от случая, когда поперечное ускорение или угловая скорость относительно вертикальной оси приспосабливается.
[0012] В первом аспекте, контроллер может быть выполнен с возможностью изменять силу поворота при рулении первого устройства руления узлом «колесо-шина» или второго устройства руления узлом «колесо-шина», которое выполнено с возможностью рулить одним из правого узла «колесо-шина» и левого узла «колесо-шина» таким образом, чтобы изменять положение руления одного из правого узла «колесо-шина» и левого узла «колесо-шина» в процессе изменения положения руления.
[0013] «Положение руления узла «колесо-шина»» в системе рулевого управления первого аспекта настоящего изобретения представляет просто угол поворота при рулении узла «колесо-шина» и может рассматриваться как величина изменения положения руления из положения в состоянии, в котором транспортное средство движется по прямой. Таким образом, формулировка «положение руления является большим/небольшим» является синонимичной с «угол поворота при рулении является большим/небольшим» и может считаться представляющей абсолютную величину разделения положения руления из положения в состоянии движения по прямой, которая представляет собой положение руления, достигаемое, когда транспортное средство движется по прямой. «Целевое положение руления» определяется на основе запроса на руление и может определяться, например, на основе рабочей величины задействования рабочего элемента руления, такого как руль. Дополнительно, когда транспортное средство управляется в режиме автономного вождения (автоматически рулится), целевое положение руления может определяться на основе инструкции от системы автономного вождения.
[0014] Режим, в котором выполнение управления недостаточной поворачиваемостью определяется на основе разности разделенных нагрузок или разности сил поворота при рулении, может рассматриваться как режим, который выглядит так, как если устойчивость при повороте транспортного средства обеспечивается посредством использования подруливания за счет податливости под действием поперечной силы. С учетом этого, узел «колесо-шина» с положением руления, измененным при управлении недостаточной поворачиваемостью (в дальнейшем в этом документе может называться «измененным узлом «колесо-шина»»), предпочтительно представляет собой внешний поворотный узел «колесо-шина» с большей разделенной нагрузкой кузова транспортного средства, из правых и левых узлов «колесо-шина», т.е. узел «колесо-шина», который находится на большем расстоянии от центра поворота транспортного средства.
[0015] Управление недостаточной поворачиваемостью может выполняться таким образом, что положение руления измененного узла «колесо-шина» становится меньшим, когда предоставляется пара устройств руления узлом «колесо-шина», соответствующих правому и левому передним узлам «колесо-шина» в транспортном средстве, имеющем четыре узла «колесо-шина», включающих в себя правый и левый передние узлы «колесо-шина» и правый и левый задние узлы «колесо-шина». Управление недостаточной поворачиваемостью может выполняться таким образом, что положение руления измененного узла «колесо-шина» становится большим, когда предоставляется пара устройств руления узлом «колесо-шина», соответствующих правому и левому задним узлам «колесо-шина» в транспортном средстве, имеющем четыре узла «колесо-шина», включающих в себя правый и левый передние узлы «колесо-шина» и правый и левый задние узлы «колесо-шина». В транспортном средстве, имеющем четыре узла «колесо-шина», включающих в себя правый и левый передние узлы «колесо-шина» и правый и левый задние узлы «колесо-шина», могут предоставляться четыре устройства руления узлом «колесо-шина», соответствующие правому и левому передним узлам «колесо-шина» и правому и левому задним узлам «колесо-шина». В этом случае, управление недостаточной поворачиваемостью может выполняться таким образом, что положение руления измененного узла «колесо-шина» на стороне передних узлов «колесо-шина» становится меньшим, и положение руления измененного узла «колесо-шина» на стороне задних узлов «колесо-шина» становится большим.
[0016] Распознавание внешнего поворотного узла «колесо-шина» при выполнении управления недостаточной поворачиваемостью может пониматься из вышеприведенного описания. Например, в первом аспекте, контроллер может быть выполнен с возможностью сравнивать силы поворота при рулении, сгенерированные посредством первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина», и распознавать, в качестве внешнего поворотного узла «колесо-шина», узел «колесо-шина», рулящийся посредством одного из первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина». Одно из первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина» может формировать большую силу поворота при рулении. Внешний поворотный узел «колесо-шина» может распознаваться на основе рабочего направления рабочего элемента руления. Тем не менее, когда транспортное средство управляется в режиме автономного вождения, например, рабочий элемент руления может не работать, так что распознавание на основе сравнения сил поворота при рулении является эффективным.
[0017] В первом аспекте, индекс поворота может представлять собой разность между силой поворота при рулении, сгенерированной посредством первого устройства руления узлом «колесо-шина», и силой поворота при рулении, сгенерированной посредством второго устройства руления узлом «колесо-шина».
[0018] В первом аспекте, контроллер может изменять заданное пороговое значение.
[0019] В первом аспекте, контроллер может изменять величину изменения положения руления одного из правого узла «колесо-шина» и левого узла «колесо-шина» в процессе изменения положения руления.
[0020] Заданное пороговое значение для индекса поворота, используемого для определения выполнения управления недостаточной поворачиваемостью, может задаваться фиксированным или регулируемым образом. Например, когда режим вождения транспортного средства задается в качестве режима, который ориентируется на устойчивость при повороте, заданное пороговое значение может задаваться равным небольшому значению, чтобы упрощать выполнение управления недостаточной поворачиваемостью, а когда режим вождения транспортного средства задается в качестве режима, который ориентируется на скорость отклика (быстроту) поведения транспортного средства, заданное пороговое значение может задаваться равным большому значению, чтобы затруднять выполнение управления недостаточной поворачиваемостью.
[0021] Положение руления измененного узла «колесо-шина» при управлении недостаточной поворачиваемостью может изменяться посредством изменения целевого положения руления, но альтернативно, может изменяться посредством ограничения или увеличения силы поворота при рулении, сгенерированной посредством одного из первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина». Кроме того, когда устройство руления узлом «колесо-шина» имеет электромотор в качестве источника приведения в движение, как описано выше, положение руления измененного узла «колесо-шина» может изменяться посредством уменьшения или увеличения питающего тока в электромотор.
[0022] Помимо этого, величина изменения положения руления измененного узла «колесо-шина» при управлении недостаточной поворачиваемостью, т.е. разность положения руления между случаем, в котором управление недостаточной поворачиваемостью не выполняется, и случаем, в котором управление недостаточной поворачиваемостью выполняется, может задаваться фиксированным образом или задаваться таким образом, что она является переменной в зависимости от некоторых параметров. Посредством изменения величины изменения, можно регулировать податливость при операции подруливания за счет податливости под действием поперечной силы, описанной выше для целей достижения соответствующего ощущения отклика при операции руления водителя, и также можно регулировать положение руления измененного узла «колесо-шина» для целей достижения соответствующей степени устойчивости при повороте транспортного средства. В частности, например, может быть приспособлена конфигурация, в которой величина изменения задается небольшой, когда можно имитировать ситуацию, в которой операция относительно большого нажатия педали тормоза выполняется водителем, либо когда можно имитировать ситуацию, в которой операция относительно большого нажатия педали акселератора выполняется водителем.
Краткое описание чертежей
[0023] Далее будут описаны признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены аналогичные элементы, и на которых:
Фиг. 1 является схематичным видом, показывающим общую конфигурацию системы рулевого управления транспортного средства согласно первому варианту осуществления;
Фиг. 2 является видом в перспективе, показывающим модуль установки узла «колесо-шина», включающий в себя устройство руления узлом «колесо-шина», составляющее систему рулевого управления транспортного средства первого варианта осуществления;
Фиг. 3 является графиком, показывающим сравнение между внешним поворотным узлом «колесо-шина» и внутренним поворотным узлом «колесо-шина» относительно крутящего момента поворота при рулении, сгенерированного посредством электромотора рулевого управления, который служит в качестве силы поворота при рулении для руления узлом «колесо-шина»;
Фиг. 4 является блок-схемой последовательности операций способа интегрированной управляющей программы для руления, выполняемой в системе рулевого управления транспортного средства первого варианта осуществления;
Фиг. 5 является блок-схемой последовательности операций способа программы для руления узлом «колесо-шина», выполняемой в системе рулевого управления транспортного средства первого варианта осуществления;
Фиг. 6 является блок-схемой последовательности операций способа вложенной процедуры для процесса изменения положения руления, которая составляет часть интегрированной управляющей программы для руления;
Фиг. 7 является схематичным видом, показывающим общую конфигурацию системы рулевого управления транспортного средства согласно второму варианту осуществления;
Фиг. 8 является блок-схемой последовательности операций способа интегрированной управляющей программы для руления, выполняемой в системе рулевого управления транспортного средства второго варианта осуществления; и
Фиг. 9 является блок-схемой последовательности операций способа программы для руления узлом «колесо-шина», выполняемой в системе рулевого управления транспортного средства второго варианта осуществления.
Подробное описание вариантов осуществления изобретения
[0024] В дальнейшем в этом документе, в качестве режима для осуществления настоящего изобретения, подробно описывается система рулевого управления транспортного средства согласно варианту осуществления настоящего изобретения и ее модификация со ссылкой на чертежи. В дополнение к нижеприведенным вариантам осуществления, настоящее изобретение может выполняться в различных режимах с различными модификациями и улучшениями на основе знаний специалистов в данной области техники, включающих в себя режимы, описанные в разделе» Сущность изобретения».
A. Конфигурация системы рулевого управления транспортного средства
[0025] Система рулевого управления транспортного средства согласно первому варианту осуществления (в дальнейшем в этом документе может называться просто «системой рулевого управления») представляет собой так называемую систему рулевого управления по проводам. Как схематично показано на фиг. 1, система рулевого управления транспортного средства включает в себя: пару устройств 12 руления узлом «колесо-шина», которые монтируются на транспортном средстве, имеющем правый и левый передние узлы 10FR и 10FL «колесо-шина» и правый и левый задние узлы 10RR и 10RL «колесо-шина», и которые, соответственно, рулят правым и левым передними узлами 10FR и 10FL «колесо-шина»; рабочее устройство 14 для приема операции водителя; пару электронных блоков 16 управления рулением (в дальнейшем в этом документе могут сокращаться как «ECU рулевого управления») для соответствующего управления устройствами 12 руления узлом «колесо-шина»; и рабочий электронный блок 18 управления рулением (в дальнейшем в этом документе может сокращаться как «рабочий ECU») для управления рабочим устройством 14 и контроля за ECU 16 рулевого управления. Когда необязательно отличать между правым и левым передними узлами 10FR и 10FL «колесо-шина», они могут совместно называться «передними узлами 10F «колесо-шина»», а когда необязательно отличать между правым и левым задними узлами 10RR и 10RL «колесо-шина», они могут совместно называться «задними узлами 10R «колесо-шина»». Когда необязательно отличать между передними узлами 10F «колесо-шина» и задними узлами 10R «колесо-шина», они могут совместно называться «узлами 10 «колесо-шина»».
[0026] Каждое из устройств 12 руления узлом «колесо-шина» включается в модуль 20 установки узла «колесо-шина», который подробно описывается ниже. ECU 16 рулевого управления и рабочий ECU 18 соединяются с автомобильной сетью или контроллерной сетью 22 (CAN) и могут обмениваться данными между собой через CAN 22. В системе рулевого управления, можно считать, что контроллеры для управления устройствами 12 руления узлом «колесо-шина» сконструированы посредством ECU 16 рулевого управления, рабочего ECU 18 и CAN 22.
[0027] Модуль 20 установки узла «колесо-шина» (в дальнейшем в этом документе может сокращаться просто как «модуль») представляет собой модуль для установки колеса 10b с шиной 10a, смонтированной на нем, на кузове транспортного средства, как показано на фиг. 2. Непосредственно колесо 10b может рассматриваться как узел «колесо-шина», но в настоящем варианте осуществления, колесо 10b с шиной 10a, смонтированной на нем, называется «узлом 10 «колесо-шина»».
[0028] Модуль 20 имеет приводной блок 24 узла «колесо-шина» в качестве вращательного приводного устройства узла «колесо-шина». Приводной блок 24 узла «колесо-шина» включает в себя корпус 24a, электромотор, служащий в качестве источника приведения в движение, включенного в корпус 24a, и редуктор для уменьшения частоты вращения, переносимой из электромотора (оба из них не показаны), и ступицу оси, к которой присоединяется узел 10b «колесо-шина» (скрытый и невидимый на фиг. 2). Приводной блок 24 узла «колесо-шина» располагается внутри обода колеса 10b и представляет собой, так называемый, блок со встроенным в колесо электромотором. Поскольку приводной блок 24 узла «колесо-шина» имеет известную конструкцию, описание его конструкции опускается.
[0029] Модуль 20 включает в себя устройство подвески на основе принципа Макферсона (также называется «устройством подвески в виде стойки Макферсона»). В этом устройстве подвески, корпус 24a приводного блока 24 узла «колесо-шина» функционирует в качестве водила, которое удерживает узел «колесо-шина» таким образом, что узел «колесо-шина» является вращающимся, и дополнительно, корпус 24a функционирует в качестве поворотного кулака рулевого управления в устройстве 12 руления узлом «колесо-шина», описанном ниже, и ему разрешается перемещаться вверх и вниз относительно кузова транспортного средства. Таким образом, устройство подвески включает в себя нижний рычаг 26, который представляет собой рычаг подвески, корпус 24a приводного блока 24 узла «колесо-шина», амортизатор 28 и пружину 30 подвески.
[0030] Поскольку непосредственно устройство подвески имеет общую конструкцию, приводится его краткое описание. Нижний рычаг 26 имеет форму так называемого Г-образного рычага, и его базовый концевой участок разделяется на две части в направлении спереди назад транспортного средства. В базовом концевом участке, нижний рычаг 26 поддерживается посредством бокового элемента (не показан) кузова транспортного средства через первую втулку 32 и вторую втулку 34 таким образом, что он является вращающимся вокруг оси LL поворота рычага. Корпус 24a приводного блока 24 узла «колесо-шина» соединяется с возможностью вращения, в своей нижней части, с дальним концевым участком нижнего рычага 26 через соединительный шаровой шарнир 36 рычага, который представляет собой первый шарнир (в дальнейшем в этом документе может называться «первым шарниром 36»).
[0031] Нижний концевой участок амортизатора 28 жестко поддерживается посредством корпуса 24a приводного блока 24 узла «колесо-шина», и верхний концевой участок амортизатора 28 поддерживается посредством верхней части колесной ниши кузова транспортного средства через верхнюю опору 38. Верхний концевой участок пружины 30 подвески также поддерживается посредством верхней части колесной ниши кузова транспортного средства через верхнюю опору 38, и нижний концевой участок пружины 30 подвески поддерживается посредством нижней опоры 28a, предоставленной в форме фланца на амортизаторе 28. Таким образом, пружина 30 подвески и амортизатор 28 размещаются параллельно друг с другом между нижним рычагом 26 и кузовом транспортного средства.
[0032] Модуль 20 имеет тормозное устройство, и тормозное устройство включает в себя дисковый ротор 40 и тормозной суппорт 42. Дисковый ротор 40 присоединяется к ступице оси вместе с колесом 10b и вращается вместе с узлом 10 «колесо-шина». Тормозной суппорт 42 удерживается посредством корпуса 24a приводного блока 24 узла «колесо-шина» таким образом, что он протягивается поверх дискового ротора 40. Хотя подробное описание опускается, тормозной суппорт 42 имеет тормозную колодку, служащую в качестве фрикционного элемента, и тормозной актуатор, который имеет электромотор и прижимает тормозную колодку к дисковому ротору 40 с помощью силы электромотора, чтобы прекращать вращение узла 10 «колесо-шина». Тормозное устройство представляет собой, так называемое, электрическое тормозное устройство, которое формирует тормозную силу в зависимости от силы, сгенерированной посредством электромотора.
[0033] Дополнительно, модуль 20 имеет вышеуказанное устройство 12 руления узлом «колесо-шина», которое составляет систему рулевого управления настоящего варианта осуществления. Устройство 12 руления узлом «колесо-шина» представляет собой одноколесное независимое устройство руления для руления только одним из правых и левых узлов 10 «колесо-шина» независимо от другого. Устройство 12 руления узлом «колесо-шина», в общем, включает в себя корпус 24a приводного блока 24 узла «колесо-шина», который функционирует в качестве поворотного кулака рулевого управления, как описано выше (в дальнейшем в этом документе может называться «поворотным кулаком 24a» при трактовке в качестве компонента устройства 12 руления узлом «колесо-шина»), актуатор 46 рулевого управления, расположенный на нижнем рычаге 26 в положении рядом с базовым концевым участком нижнего рычага 26, и поперечную рулевую тягу 48, которая соединяет актуатор 46 рулевого управления и поворотный кулак 24a.
[0034] Актуатор 46 рулевого управления вращается посредством вращения электромотора 46a рулевого управления, который представляет собой электромотор, служащий в качестве источника приведения в движение, редуктора 46b, который уменьшает частоту вращения, переносимую из электромотора 46a рулевого управления, и рычаг 46c актуатора, который вращается посредством вращения электромотора 46a рулевого управления через редуктор 46b, и который функционирует в качестве поворотного тягового рычага. Базовый концевой участок поперечной рулевой тяги 48 соединяется с рычагом 46c актуатора через базовый концевой соединительный шаровой шарнир 50 рулевой тяги, который представляет собой второй шарнир (в дальнейшем в этом документе может называться «вторым шарниром 50»). Дальний концевой участок поперечной рулевой тяги 48 соединяется с рычагом 24b поворотного кулака поворотного кулака 24a через шаровой шарнир 52 в дальнем концевом участке рулевой тяги, который представляет собой третий шарнир (в дальнейшем в этом документе может называться «третьим шарниром 52»).
[0035] В устройстве 12 руления узлом «колесо-шина», линия, соединяющая центр верхней опоры 38 и центр первого шарнира 36, представляет собой ось KP поворотного шкворня. Посредством активации электромотора 46a рулевого управления, рычаг 46c актуатора для актуатора 46 рулевого управления вращается вокруг AL оси актуатора, как показано посредством толстой стрелки на фиг. 2. Вращение передается посредством поперечной рулевой тяги 48, и поворотный кулак 24a вращается вокруг оси KP поворотного шкворня. Таким образом, как показано посредством толстой стрелки на фиг. 2, узел 10 «колесо-шина» рулится. За счет такой конструкции, устройство 12 руления узлом «колесо-шина» имеет механизм 54 преобразования движения, который включает в себя рычаг 46c актуатора, поперечную рулевую тягу 48, рычаг 24b поворотного кулака и т.п., и который преобразует вращательное движение электромотора 46a рулевого управления в движение при рулении узлов 10 «колесо-шина».
[0036] В устройстве 12 руления узлом «колесо-шина», актуатор 46 рулевого управления располагается на нижнем рычаге 26. Следовательно, модуль 20 может легко собираться на кузове транспортного средства. Вкратце, модуль 20, включающий в себя устройство подвески, тормозное устройство и устройство руления узлом «колесо-шина», может монтироваться на транспортном средстве посредством простого присоединения базового концевого участка нижнего рычага 26 к боковому элементу кузова транспортного средства и присоединения верхней опоры 38 к верхней части колесной ниши кузова транспортного средства. Таким образом, модуль 20 представляет собой модуль, имеющий превосходную простоту и удобство монтажа относительно транспортного средства.
[0037] Рабочее устройство 14 имеет общую конструкцию в системе рулевого управления по проводам. Вкратце, как показано на фиг. 1, рабочее устройство 14 включает в себя руль 56, служащий в качестве рабочего элемента руления, управляемого водителем, датчик 58 руления для определения рабочего угла, который представляет собой угол вращения руля 56, в качестве рабочего положения рабочего элемента руления и устройство 60 приложения реактивного усилия, которое прикладывает действующее реактивное усилие к рулю 56. Устройство 60 приложения реактивного усилия включает в себя электромотор 62 формирования реактивного усилия, который представляет собой электромотор, служащий в качестве источника мощности, и редуктор 64 для переноса силы электромотора 62 формирования реактивного усилия на руль 56.
B. Управление системой рулевого управления транспортного средства
i. Базовое управление рулением
[0038] Вкратце, базовое управление рулением в системе рулевого управления представляет собой управление для руления каждым из двух передних узлов 10F «колесо-шина» в положение ψ руления в ответ на запрос руления. Положение ψ руления является синонимичным с так называемым углом поворота при рулении и может рассматриваться как величина сдвига фаз из опорного положения руления, т.е. величина руления. В этом случае, положение в состоянии движения по прямой, в которой передний узел 10F «колесо-шина» должен позиционироваться, когда транспортное средство движется по прямой, задается как опорное положение руления.
[0039] В дальнейшем подробно описывается базовое управление рулением. Рабочий ECU 18, который представляет собой электронный блок управления, служащий в качестве интегрального средства управления, получает рабочий угол руля 56 на основе определения датчика 58 руления, т.е. рабочее положение δ руления (в дальнейшем в этом документе может называться просто «рабочим положением δ») в качестве степени операции руления. На основе рабочего положения δ, рабочий ECU 18 определяет целевое положение ψ* руления, которое представляет собой положение ψ руления, которое должно реализовываться в каждом узле 10 «колесо-шина» согласно заданному передаточному отношению рулевого управления. Рабочее положение δ может рассматриваться как величина изменения положения из опорного рабочего положения, т.е. рабочая величина руления, при том, что положение в состоянии движения по прямой для обеспечения принудительного движения транспортного средства по прямой задается в качестве опорного рабочего положения. Когда транспортное средство управляется в режиме автономного вождения, целевое положение ψ* руления, включенное в инструкцию, отправленную из системы автономного вождения (ни показана) через CAN 22, приспосабливается вместо целевого положения ψ* руления, определенного на основе рабочего положения δ. Строго говоря, рабочее положение δ руления и положение ψ руления имеют противоположные значения на правой и левой сторонах опорного рабочего положения и опорного положения руления.
[0040] Устройство 12 руления узлом «колесо-шина» не имеет датчика положения руления для непосредственного определения положения ψ руления узла 10 «колесо-шина». Следовательно, в этой системе рулевого управления, рабочий ECU 18 и каждый из ECU 16 рулевого управления управляют, на основе рабочего положения электромотора 46a рулевого управления, силой поворота при рулении, сгенерированной посредством актуатора 46 рулевого управления, с использованием того факта, что возникает конкретная взаимосвязь между положением ψ руления узла 10 «колесо-шина» и рабочим положением электромотора 46a рулевого управления. Сила поворота при рулении, сгенерированная посредством актуатора 46 рулевого управления, является эквивалентной крутящему моменту Tq поворота при рулении, который представляет собой крутящий момент, сгенерированный посредством электромотора 46a рулевого управления. Следовательно, в частности, рабочий ECU 18 определяет целевой крутящий момент Tq* поворота при рулении, который представляет собой крутящий момент Tq поворота при рулении, который должен формироваться посредством электромотора 46a рулевого управления, на основе рабочего положения электромотора 46a рулевого управления.
[0041] Рабочее положение электромотора 46a рулевого управления представляет собой угловое положение вала электромотора, т.е. угол θ вращения электромотора, поскольку электромотор 46a рулевого управления представляет собой роторный электромотор. Рабочее положение электромотора может рассматриваться как рабочая величина электромотора, а именно, величина изменения из опорного рабочего положения, которое представляет собой рабочее положение электромотора, когда транспортное средство движется по прямой. Угол θ вращения электромотора может рассматриваться как угол смещения относительно опорного угла вращения электромотора, который представляет собой опорное рабочее положение электромотора, когда транспортное средство движется по прямой. Угол θ вращения электромотора накапливается с превышением 360°. Кроме того, в устройстве 12 руления узлом «колесо-шина», электромотор 46a рулевого управления и поворотный кулак 24a механически соединяются, и возникает конкретная взаимосвязь между величиной изменения угла θ вращения электромотора для электромотора 46a рулевого управления и величиной изменения положения ψ руления узла «колесо-шина». Грубо говоря, можно считать, что взаимосвязь на основе определенного соотношения, которое основано на передаточном числе редуктора для редуктора 46b и т.п., устанавливается между величиной изменения угла θ вращения электромотора и величиной изменения положения ψ руления. С использованием этой взаимосвязи, положение ψ руления узлов 10 «колесо-шина» управляется посредством управления углом вращения электромотора θ, вместо непосредственного управления положением ψ руления. Строго говоря, угол θ вращения электромотора также имеет противоположные значения на правой и левой сторонах опорного угла вращения электромотора.
[0042] В частности, в дальнейшем подробно описывается определение целевого крутящего момента Tq* поворота при рулении. Для каждого узла 10 «колесо-шина», рабочий ECU 18 определяет целевой угол θ* вращения электромотора, служащий в качестве целевого рабочего положения, которое представляет собой цель угла θ вращения электромотора, на основе целевого положения ψ* руления. С другой стороны, электромотор 46a рулевого управления представляет собой бесщеточный электромотор постоянного тока и имеет датчик угла вращения электромотора (например, интегральную схему (IC) Холла, круговой датчик положения и т.д.) для переключения фаз при подаче тока в электромотор 46a рулевого управления. На основе определения датчика угла вращения электромотора, каждый ECU 16 рулевого управления выясняет фактический угол θ вращения электромотора, который представляет собой текущий угол θ вращения электромотора, на основе опорного угла вращения электромотора и передает информацию относительно фактического угла θ вращения электромотора в рабочий ECU 18 через CAN 22. Рабочий ECU 18 получает отклонение Δθ угла вращения электромотора, которое представляет собой отклонение угла θ вращения электромотора относительно целевого угла θ* вращения электромотора, в качестве отклонения рабочего положения для каждого узла 10 «колесо-шина», и на основе этого отклонения Δθ угла вращения электромотора (=θ*-θ) определяет целевой крутящий момент Tq* поворота при рулении согласно следующему уравнению.
Tq*=GP*Δθ+GD*(Δdθ/dt)+GI*∫Δθdt
Вышеприведенное уравнение представляет собой уравнение согласно закону управления с обратной связью на основе отклонения Δθ угла вращения электромотора, и первый член, второй член и третий член представляют собой пропорциональный член, дифференциальный член, интегральный член, соответственно, и GP, GD и GI представляют пропорциональное усиление, дифференциальное усиление и интегральное усиление, соответственно.
[0043] Рабочий ECU 18 передает информацию относительно целевого крутящего момента Tq* поворота при рулении в ECU 16 рулевого управления каждого узла 10 «колесо-шина» через CAN 22, и каждый ECU 16 рулевого управления управляет электромотором рулевого управления 46a на основе целевого крутящего момента Tq* поворота при рулении. Крутящий момент Tq поворота при рулении и питающий ток I в электромотор 46a рулевого управления имеют конкретную взаимосвязь. В частности, поскольку крутящий момент Tq поворота при рулении зависит от силы, прилагаемой посредством электромотора 46a рулевого управления, крутящий момент Tq поворота при рулении и питающий ток I, в общем, находятся в пропорциональной взаимосвязи. На основе этого, каждый ECU 16 рулевого управления определяет целевой питающий ток I*, который представляет собой цель питающего тока I в электромотор 46a рулевого управления, на основе целевого крутящего момента Tq* поворота при рулении, определенного в рабочем ECU 18, и подает питающий ток I* в электромотор 46a рулевого управления. В частности, каждый ECU 16 рулевого управления имеет компьютер, который выполняет такие процессы, как определение целевого питающего тока I*, и инвертор, служащий в качестве схемы приведения в действие, соединенной с компьютером, и на основе целевого питающего тока I*, определенного посредством компьютера, ток I подается из инвертора в электромотор 46a рулевого управления. Согласно базовому управлению рулением, описанному выше, сила поворота при рулении, сгенерированная посредством каждого из устройств 12 руления узлом «колесо-шина», т.е. крутящий момент Tq поворота при рулении, управляется таким образом, что положение ψ руления каждого из правых и левых узлов 10 «колесо-шина» управляется таким образом, что она совпадает с целевым положением ψ* руления.
ii. Изменение положения руления для того, чтобы реализовывать тенденцию к недостаточной поворачиваемости
[0044] Когда транспортное средство поворачивает, и поворот является серьезным, желательно, если характеристики поворачиваемости транспортного средства имеют тенденцию к недостаточной поворачиваемости с точки зрения устойчивости при повороте транспортного средства. Формулировка «поворот является серьезным» означает то, что центробежная сила, действующая на кузов транспортного средства во время поворота, является большой. С учетом этого, в системе рулевого управления, когда индекс поворота, указывающий серьезность поворота, превышает заданное пороговое значение, характеристики поворачиваемости транспортного средства задаются таким образом, чтобы иметь более сильную тенденцию к недостаточной поворачиваемости по сравнению со случаем, в котором индекс поворота не превышает заданное пороговое значение. Для этого, положение ψ руления одного из правых и левых узлов «колесо-шина», более конкретно, внешнего узла 10 «колесо-шина» при повороте (в дальнейшем в этом документе может называться «внешним поворотным узлом «колесо-шина»», и внутренний узел «колесо-шина» может называться «внутренним поворотным узлом «колесо-шина»») изменяется. Тенденция к недостаточной поворачиваемости означает характеристики механизма ходовой части транспортного средства, при которых, когда транспортное средство с нормальным уровнем устойчивости при прямолинейном движении увеличивает свою движущую силу (скорость) с постоянным углом поворота при рулении при устойчивом круговом повороте, силы трения земли передних узлов «колесо-шина» уничтожаются посредством центробежной силы, и транспортное средство обращено наружу относительно окружности. Альтернативно, тенденция к недостаточной поворачиваемости означает состояние, в котором необходимо поворачивать руль для того, чтобы продолжать постоянный поворот.
[0045] Система рулевого управления приспосабливает, в качестве индекса поворота, разность между силами поворота при рулении, фактически прилагаемыми посредством электромоторов 46a рулевого управления правого и левого устройств 12 рулевого управления узлом «колесо-шина», т.е. разность ΔTq крутящих моментов (=|TqL-TqR|), которая представляет собой разность между крутящими моментами TqL и TqR поворота при рулении электромоторов 46a рулевого управления правого и левого устройств 12 рулевого управления узлом «колесо-шина». Когда разность ΔTq крутящих моментов превышает пороговую разность ΔTq0 крутящих моментов, которая составляет заданное пороговое значение, положение ψ руления внешнего поворотного узла «колесо-шина» изменяется.
[0046] Крутящий момент Tq поворота при рулении, а именно, крутящий момент Tq поворота при рулении для руления узлом 10 «колесо-шина» в определенное положение ψ руления или крутящий момент Tq поворота при рулении для поддержания узла 10 «колесо-шина» в определенном положении ψ руления должен уничтожать самовыравнивающий крутящий момент. Следовательно, крутящий момент Tq поворота при рулении увеличивается по мере того, как скорость движения транспортного средства (в дальнейшем в этом документе может называться «скоростью транспортного средства») увеличивается, и положение ψ руления узла 10 «колесо-шина» увеличивается (становится более далекой от положения движения по прямой). Между тем, крутящий момент Tq поворота при рулении увеличивается по мере того, как нагрузка WS кузова транспортного средства, разделенная посредством узла 10 «колесо-шина» (в дальнейшем в этом документе может называться «разделенной нагрузкой WS»), увеличивается. При условии, что крутящий момент Tq поворота при рулении внешнего поворотного узла «колесо-шина» представляет собой крутящий момент TqO внешнего узла «колесо-шина», и крутящий момент Tq поворота при рулении внутреннего поворотного узла «колесо-шина» представляет собой крутящий момент TqI внутреннего узла «колесо-шина», крутящий момент TqO внешнего узла «колесо-шина» и крутящий момент TqI внутреннего узла «колесо-шина» изменяются с положением ψ руления, как показано на фиг. 3, с постоянной скоростью. Разность ΔTq между крутящими моментами TqR и TqL поворота при рулении для правых и левых узлов 10 «колесо-шина», т.е. разность ΔTq крутящих моментов, которая представляет собой разность между крутящим моментом TqO внешнего узла «колесо-шина» и крутящим моментом TqI внутреннего узла «колесо-шина», увеличивается по мере того, как разность ΔWS разделенных нагрузок, которая представляет собой разность между разделенными нагрузками WSR и WSL правых и левых узлов «колесо-шина», увеличивается. По мере того, как серьезность поворота увеличивается, разность ΔWS разделенных нагрузок увеличивается, так что разность ΔTq крутящих моментов может представлять собой вышеуказанный индекс поворота. Можно использовать поперечное ускорение, сгенерированное в кузове транспортного средства, угловую скорость относительно вертикальной оси транспортного средства и т.д. в качестве индекса поворота, но при использовании разности ΔTq крутящих моментов в качестве индекса поворота, можно получать такое преимущество, что отдельный датчик не требуется.
[0047] Каждый ECU 16 рулевого управления определяет ток I, фактически подаваемый в электромотор 46a рулевого управления (в дальнейшем в этом документе может называться «фактическим питающим током I»), на основе информации из инвертора. На основе фактического питающего тока I, ECU 16 рулевого управления оценивает крутящий момент Tq поворота при рулении, фактически прилагаемый (в дальнейшем в этом документе может называться «фактическим крутящим моментом поворота при рулении Tq») в соответствии со взаимосвязью, описанной выше, и передает информацию относительно фактического крутящего момента Tq поворота при рулении в рабочий ECU 18. Рабочий ECU 18 указывает разность ΔTq крутящих моментов на основе принимаемых фактических крутящих моментов TqR и TqL поворота при рулении для правых и левых узлов 10 «колесо-шина». Когда разность ΔTq крутящих моментов превышает пороговую разность ΔTq0 крутящих моментов, рабочий ECU 18 распознает то, что поворот является серьезным, и выполняет процесс изменения положения руления для уменьшения положения ψ руления внешнего поворотного узла «колесо-шина».
[0048] В системе рулевого управления, пороговая разность ΔTq0 крутящих моментов для определения выполнения процесса изменения положения руления задается равной значению, которое отличается в зависимости от характеристик движения, которые должны реализовываться в транспортном средстве. Таким образом, пороговая разность ΔTq0 крутящих моментов может изменяться. В транспортном средстве, два режима вождения, включающие в себя комфортный режим и спортивный режим, подготавливаются в качестве режима вождения транспортного средства, и один из двух режимов вождения выбирается посредством операции водителя. Комфортный режим представляет собой режим вождения, который ориентируется на комфорт во время езды и устойчивость при движении транспортного средства, и спортивный режим представляет собой режим вождения, который ориентируется на резкое и скоростное движение и отклик при вождении транспортного средства. Рабочий ECU 18 задает пороговую разность ΔTq0 крутящих моментов равной значению ΔTqC для комфортного режима, которое составляет относительно небольшое значение, чтобы расширять диапазон выполнения процесса изменения положения руления, когда выбирается комфортный режим. Рабочий ECU 18 задает пороговую разность ΔTq0 крутящих моментов равной значению ΔTqS для спортивного режима, которое составляет относительно большое значение, чтобы сужать диапазон выполнения процесса изменения положения руления, когда выбирается спортивный режим.
[0049] При выполнении процесса изменения положения руления, рабочий ECU 18 определяет то, какой из левого переднего узла 10FL «колесо-шина» и правого переднего узла 10FR «колесо-шина» представляет собой внешний поворотный узел «колесо-шина». При этом определении, рабочий ECU 18 сравнивает силы поворота при рулении, сгенерированные посредством правого и левого устройств 12 рулевого управления узлом «колесо-шина», т.е. фактический крутящий момент TqL поворота при рулении для левого переднего узла 10FL «колесо-шина» и фактический крутящий момент TqR поворота при рулении для правого переднего узла 10FR «колесо-шина», и распознает передний узел 10F «колесо-шина», имеющий больший фактический крутящий момент поворота при рулении (строго говоря, передний узел 10F «колесо-шина» с большим абсолютным значением), в качестве внешнего поворотного узла «колесо-шина». Распознавание внешнего поворотного узла «колесо-шина» может выполняться на основе направления операции поворота руля 56. Тем не менее, распознавание внешнего поворотного узла «колесо-шина» посредством сравнения фактических крутящих моментов Tq поворота при рулении является, в частности, эффективным, например, когда транспортное средство управляется в режиме автономного вождения, и руль 56 не поворачивается водителем.
[0050] В процессе изменения положения руления, целевой крутящий момент Tq* поворота при рулении для распознанного внешнего поворотного узла «колесо-шина» изменяется на величину dTq изменения крутящего момента поворота при рулении. В частности, когда левый передний узел 10FL «колесо-шина» распознается в качестве внешнего поворотного узла «колесо-шина», целевой крутящий момент TqL* поворота при рулении для левого переднего узла 10FL «колесо-шина» уменьшается на величину dTq изменения крутящего момента поворота при рулении. Когда правый передний узел 10FR «колесо-шина» распознается в качестве внешнего поворотного узла «колесо-шина», целевой крутящий момент TqR* поворота при рулении для правого переднего узла 10FR «колесо-шина» уменьшается на величину dTq изменения крутящего момента поворота при рулении.
[0051] Тем не менее, в системе рулевого управления, величина dTq изменения крутящего момента поворота при рулении изменяется в соответствии с рабочим состоянием транспортного средства. Более конкретно, величина dTq изменения крутящего момента поворота при рулении обычно составляет нормальное значение dTqN, но когда операция относительно большого торможения выполняется для транспортного средства, и когда операция относительно большого нажатия педали акселератора выполняется для транспортного средства, величина dTq изменения крутящего момента поворота при рулении изменяется таким образом, что она является небольшой. В частности, на основе ускорения Gx в направлении спереди назад (которое принимает положительное значение при ускорении и отрицательное значение при замедлении), определенного посредством датчика 66 ускорения в направлении спереди назад (см. фиг. 1), смонтированного на транспортном средстве, рабочий ECU 18 изменяет величину dTq изменения крутящего момента поворота при рулении на значение dTqB замедления (<dTqN), когда ускорение Gx в направлении спереди назад меньше порогового значения GxB на стороне замедления, и изменяет величину dTq изменения крутящего момента поворота при рулении на значение dTqA ускорения (<dTqN), когда ускорение Gx в направлении спереди назад превышает пороговое значение GxA на стороне ускорения. Значение dTqB замедления задается меньше значения dTqA ускорения. Изменение величины dTq изменения крутящего момента поворота при рулении, как описано выше, обеспечивает возможность системе рулевого управления регулировать податливость при операции подруливания за счет податливости под действием поперечной силы для целей достижения соответствующего ощущения отклика при операции руления водителя и также обеспечивает возможность системе рулевого управления регулировать положение ψ руления внешнего поворотного узла «колесо-шина» для целей достижения соответствующей степени устойчивости при повороте транспортного средства.
iii. Последовательность операций управления
[0052] Каждый из ECU 18 и ECU 16 рулевого управления имеет компьютер. Компьютер рабочего ECU 18 выполняет интегрированную управляющую программу для руления, проиллюстрированную посредством блок-схемы последовательности операций способа на фиг. 4, а компьютер каждого ECU 16 рулевого управления выполняет программу для руления узлом «колесо-шина», проиллюстрированную посредством блок-схемы последовательности операций способа на фиг. 5, с коротким циклом (например, от нескольких миллисекунд до нескольких десятков миллисекунд) таким образом, что выполняются базовое управление рулением и управление рулением, включающее в себя процесс изменения положения руления, описанный выше. Чтобы описывать управление рулением системы рулевого управления, ниже кратко описывается последовательность операций обработки согласно этим программам.
[0053] В процессе согласно интегрированной управляющей программе для руления, выполняемой в рабочем ECU 18, во-первых, на этапе 1 (в дальнейшем в этом документе может называться «S1»; то же применимо к другим этапам), определяется то, управляется или нет транспортное средство в режиме автономного вождения. Когда транспортное средство не управляется в режиме автономного вождения, рабочее положение δ руля 56 получается на этапе S2, на основе определения датчика 58 руления, и целевое положение ψ* руления определяется на этапе S3. Когда на этапе S1 определяется то, что транспортное средство управляется в режиме автономного вождения, информация относительно целевого положения ψ* руления из системы автономного вождения принимается на этапе S4.
[0054] Затем, на этапе S5, целевые углы θ* вращения электромотора правых и левых узлов 10 «колесо-шина» определяются, и на этапе S6, информация относительно фактических углов θ вращения электромотора электромоторов 46a рулевого управления правого и левого устройств 12 рулевого управления узлом «колесо-шина» принимается из ECU 16 рулевого управления на этапе S7, отклонения Δθ угла вращения электромотора для устройств 12 руления узлом «колесо-шина» определяются на основе целевых углов θ* вращения электромотора, определенных для электромоторов 46a рулевого управления устройств 12 руления узлом «колесо-шина», и принимаемых фактических углов θ вращения электромотора. После этого, на этапе S8, целевые крутящие моменты TqL* и TqR* поворота при рулении, которые представляют собой крутящие моменты Tq поворота при рулении, которые должны формироваться посредством электромоторов 46a рулевого управления устройств 12 руления узлом «колесо-шина», определяются согласно вышеприведенному уравнению.
[0055] На следующем этапе S9, выполняется вложенная процедура для процесса изменения положения руления, которая подробно описывается ниже, и на этапе S10, информация относительно целевых крутящих моментов TqL* и TqR* поворота при рулении, определенных на этапе S8, или целевых крутящих моментов TqL* и TqR* поворота при рулении, измененных на этапе S9, передается в ECU 16 рулевого управления.
[0056] В процессе согласно программе для руления узлом «колесо-шина», выполняемой в каждом ECU 16 рулевого управления, во-первых, на этапе S11, информация относительно фактического угла θ вращения электромотора, полученного через инвертор, передается в рабочий ECU 18. На следующем этапе S12, фактический питающий ток I, который представляет собой ток, фактически подаваемый в электромотор 46a рулевого управления через инвертор, определяется, и на этапе S13, фактический крутящий момент Tq поворота при рулении, оцененный на основе фактического питающего тока I, передается в рабочий ECU 18.
[0057] На следующем этапе S14, информация относительно целевого крутящего момента Tq* поворота при рулении получается из рабочего ECU 18, и на этапе S15, целевой питающий ток I*, который представляет собой ток, который должен подаваться в электромотор 46a рулевого управления, определяется на основе целевого крутящего момента Tq* поворота при рулении. После этого, на этапе S16, ток I на основе целевого питающего тока I* подается в электромотор 46a рулевого управления.
[0058] На этапе S9 интегрированной управляющей программы для руления, описанной выше, выполняется вложенная процедура для процесса изменения положения руления, проиллюстрированная посредством блок-схемы последовательности операций способа, показанной на фиг. 6. В процессе согласно вложенной процедуре, во-первых, на этапе S21, информация относительно фактических крутящих моментов TqL и TqR поворота при рулении принимается из каждого ECU 16 рулевого управления. На следующем этапе S22, определяется то, представляет режим вождения транспортного средства собой комфортный режим или спортивный режим. Когда режим вождения представляет собой спортивный режим, пороговая разность ΔTq0 крутящих моментов задается равной значению ΔTqS для спортивного режима на этапе S23, а когда режим вождения представляет собой комфортный режим, пороговая разность ΔTq0 крутящих моментов задается равной значению ΔTqC для комфортного режима на этапе S24. После этого, на этапе S25, при том, что разность ΔTq крутящих моментов на основе фактических крутящих моментов TqL поворота и TqR при рулении используется в качестве индекса поворота, определяется то, превышает разность ΔTq крутящих моментов или нет пороговую разность ΔTq0 крутящих моментов. Процесс изменения положения руления на этапе S26 и далее выполняется, когда разность ΔTq крутящих моментов превышает пороговую разность ΔTq0 крутящих моментов, и процесс изменения положения руления на этапе S26 и далее не выполняется, когда разность ΔTq крутящих моментов не превышает пороговую разность ΔTq0 крутящих моментов.
[0059] Когда процесс изменения положения руления выполняется, во-первых, на этапе S26, ускорение Gx в направлении спереди назад, сгенерированное в транспортном средстве, получается на основе определения датчика 66 ускорения в направлении спереди назад, на этапе S27, определяется то, меньше или нет ускорение Gx в направлении спереди назад порогового значения GxB на стороне замедления (ускорение Gx в направлении спереди назад принимает отрицательное значение и превышает пороговое значение GxB на стороне замедления по абсолютному значению). Когда определяется то, что ускорение Gx в направлении спереди назад меньше порогового значения GxB на стороне замедления, величина dTq изменения крутящего момента поворота при рулении задается равной значению dTqB замедления на этапе S28. Когда определяется то, что ускорение Gx в направлении спереди назад равно или меньше порогового значения GxB на стороне замедления, S28 пропускается. После этого, на этапе S29, определяется то, превышает или нет ускорение Gx в направлении спереди назад пороговое значение GxA на стороне ускорения, и когда определяется то, что ускорение Gx в направлении спереди назад превышает пороговое значение GxA на стороне ускорения, величина dTq изменения крутящего момента поворота при рулении задается равной значению dTqA ускорения на этапе S30. Когда определяется то, что ускорение Gx в направлении спереди назад равно или меньше порогового значения GxA на стороне ускорения, величина dTq изменения крутящего момента поворота при рулении задается равной нормальному значению dTqN на этапе S31.
[0060] На следующем этапе S32, определение внешнего поворотного узла «колесо-шина» выполняется на основе фактических крутящих моментов TqL и TqR поворота при рулении. В частности, когда фактический крутящий момент TqL поворота при рулении левого переднего узла 10FL «колесо-шина» превышает фактический крутящий момент TqR поворота при рулении правого переднего узла 10FR «колесо-шина», левый передний узел 10FL «колесо-шина» распознается в качестве внешнего поворотного узла «колесо-шина», а когда фактический крутящий момент TqR поворота при рулении правого переднего узла 10FR «колесо-шина» превышает фактический крутящий момент TqL поворота при рулении левого переднего узла 10FL «колесо-шина», правый передний узел 10FR «колесо-шина» распознается в качестве внешнего поворотного узла «колесо-шина». Когда левый передний узел 10FL «колесо-шина» распознается в качестве внешнего поворотного узла «колесо-шина», величина dTq изменения крутящего момента поворота при рулении вычитается из целевого крутящего момента TqL* поворота при рулении для левого переднего узла 10FL «колесо-шина» на этапе S33, а когда правый передний узел 10FR «колесо-шина» распознается в качестве внешнего поворотного узла «колесо-шина», величина dTq изменения крутящего момента поворота при рулении вычитается из целевого крутящего момента TqR* поворота при рулении для правого переднего узла 10FR «колесо-шина» на этапе S34.
A. Конфигурация системы рулевого управления транспортного средства
[0061] Система рулевого управления второго варианта осуществления представляет собой систему рулевого управления по проводам, аналогичную системе рулевого управления первого варианта осуществления. Тем не менее, в отличие от системы рулевого управления первого варианта осуществления, как схематично показано на фиг. 7, система рулевого управления второго варианта осуществления включает в себя пару устройств 12 руления узлом «колесо-шина» на стороне передних узлов «колесо-шина» и пару устройств 12 руления узлом «колесо-шина» на стороне задних узлов «колесо-шина», чтобы отдельно рулить правым и левым передними узлами 10FR и 10FL «колесо-шина» и правым и левым задними узлами 10RR и 10RL «колесо-шина». Система рулевого управления второго варианта осуществления включает в себя две пары ECU 16 рулевого управления, соответствующих двум парам устройств 12 руления узлом «колесо-шина». Каждый из ECU 16 рулевого управления соединяется с CAN 22, и рабочий ECU 18 контролирует ECU 16 рулевого управления.
[0062] Каждое устройство 12 руления узлом «колесо-шина» включается в модуль 20 установки узла «колесо-шина», аналогично системе рулевого управления первого варианта осуществления. Этот модуль 20 имеет конфигурацию, идентичную конфигурации модуля 20 системы рулевого управления первого варианта осуществления, и описание конфигурации модуля 20 и конфигурации устройства 12 руления узлом «колесо-шина» опускается. Дополнительно, рабочее устройство 14 также имеет конфигурацию, идентичную конфигурации рабочего устройства 14 системы рулевого управления первого варианта осуществления, и описание конфигурации рабочего устройства 14 опускается.
[0063] В отличие от транспортного средства, включающего в себя систему рулевого управления первого варианта осуществления, транспортное средство, включающее в себя систему рулевого управления настоящего варианта осуществления, не содержит датчик 66 ускорения в направлении спереди назад, а содержит датчик 68 поперечного ускорения для определения поперечного ускорения, которое представляет собой ускорение, действующее на кузов транспортного средства в направлении ширины транспортного средства. В настоящей системе рулевого управления, можно считать, что контроллеры для управления двумя парами устройств 12 руления узлом «колесо-шина» сконструированы посредством двух пар ECU 16 рулевого управления, рабочего ECU 18 и CAN 22.
B. Управление системой рулевого управления транспортного средства
i. Базовое управление рулением
[0064] Базовое управление рулением настоящей системы рулевого управления представляет собой управление для руления двумя передними узлами 10F «колесо-шина» и двумя задними узлами 10R «колесо-шина» на основе запроса на руление, а именно, рабочего положения δ руля 56. Поскольку руление передними узлам 10F «колесо-шина» является идентичным рулению через базовое управление рулением в системе рулевого управления первого варианта осуществления, его описание опускается.
[0065] В дальнейшем описывается руление задними узлами 10R «колесо-шина». Рабочий ECU 18 определяет, в дополнение к целевым положениям ψF* руления передних узлов 10F «колесо-шина», целевые положения ψR* руления задних узлов 10R «колесо-шина» на основе рабочего положения δ и скорости v движения транспортного средства (в дальнейшем в этом документе может называться просто «скоростью транспортного средства»). Вкратце, рабочий ECU 18 определяет целевые положения ψR* руления таким образом, что задние узлы 10R «колесо-шина» рулятся в идентичном направлении (в идентичной фазе) с передними узлами 10F «колесо-шина», когда скорость v транспортного средства является высокой, и задние узлы 10R «колесо-шина» рулятся в противоположном направлении (в противоположной фазе) по отношению к направлению, в котором рулятся передние узлы 10F «колесо-шина», когда скорость v транспортного средства является низкой. Поскольку способ определения целевых положений ψR* руления известен, его подробное описание опускается.
[0066] Каждый ECU 16 рулевого управления выясняет угол θ вращения электромотора для электромотора 46a рулевого управления устройства 12 руления узлом «колесо-шина» и указывает скорость vw вращения узла «колесо-шина» (в дальнейшем в этом документе может называться «скоростью вращения узла «колесо-шина»»), которая представляет собой скорость вращения узла 10 «колесо-шина» на основе изменения угла θ вращения электромотора. Каждый ECU 16 рулевого управления передает информацию относительно указанной скорости vW вращения узла «колесо-шина» в рабочий ECU 18. Рабочий ECU 18 указывает скорость v транспортного средства для транспортного средства посредством известного способа на основе принимаемой информации относительно каждой скорости vW вращения узла «колесо-шина» и использует указанную скорость v транспортного средства для того, чтобы определять целевые положения ψR* руления задних узлов 10R «колесо-шина».
[0067] Определение целевых крутящих моментов TqFR*, TqFL*, TqRR* и TqRL* поворота при рулении правого и левого передних узлов 10 «колесо-шина» и правого и левого задних узлов 10 «колесо-шина» на основе целевых положений ψF* и ψR* руления, которое выполняется посредством рабочего ECU 18, и определение целевого питающего тока I* на основе целевого крутящего момента Tq* поворота при рулении, которое выполняется посредством каждого ECU 16 рулевого управления и т.п., выполняются с использованием технологии, идентичной технологии в системе рулевого управления первого варианта осуществления. Следовательно, их подробное описание опускается здесь.
ii. Изменение положения руления для того, чтобы реализовывать тенденцию к недостаточной поворачиваемости
[0068] В настоящей системе рулевого управления, аналогично системе рулевого управления первого варианта осуществления, когда поворот транспортного средства является серьезным, рабочий ECU 18 выполняет процесс изменения положения руления для того, чтобы инструктировать характеристикам поворачиваемости транспортного средства иметь тенденцию к недостаточной поворачиваемости.
[0069] Настоящая система рулевого управления приспосабливает поперечное ускорение Gy в качестве индекса поворота для определения того, следует или нет выполнять процесс изменения положения руления, вместо разности ΔTq крутящих моментов, приспосабливаемой в системе рулевого управления первого варианта осуществления. Рабочий ECU 18 выполняет процесс изменения положения руления, когда поперечное ускорение Gy, определенное посредством датчика 68 поперечного ускорения (строго говоря, абсолютное значение поперечного ускорения Gy, поскольку знаки отличаются между правым и левым), превышает пороговое ускорение Gy0. В настоящей системе рулевого управления, пороговое ускорение Gy0 не изменяется на основе выбора режима вождения. В качестве индекса поворота, например, угловая скорость относительно вертикальной оси транспортного средства может приспосабливаться вместо поперечного ускорения Gy.
[0070] В настоящей системе рулевого управления, в процессе изменения положения руления, рабочий ECU 18 уменьшает целевой крутящий момент Tq* поворота при рулении внешнего поворотного узла 10F «колесо-шина» на стороне передних узлов «колесо-шина» на величину dTqF изменения крутящего момента на стороне передних узлов «колесо-шина», заданную для передних узлов 10F «колесо-шина», и увеличивает целевой крутящий момент Tq* поворота при рулении внешнего поворотного узла 10R «колесо-шина» на стороне задних узлов «колесо-шина» на величину dTqR изменения крутящего момента на стороне задних узлов «колесо-шина», заданную для задних узлов 10R «колесо-шина». В частности, когда левый передний узел 10FL «колесо-шина» представляет собой внешний поворотный узел «колесо-шина», целевой крутящий момент TqFL* поворота при рулении левого переднего узла 10FL «колесо-шина» уменьшается на величину dTqF изменения крутящего момента на стороне передних узлов «колесо-шина», а когда правый передний узел 10FR «колесо-шина» представляет собой внешний поворотный узел «колесо-шина», целевой крутящий момент TqFR* поворота при рулении правого переднего узла 10FR «колесо-шина» уменьшается на величину dTqF изменения крутящего момента на стороне передних узлов «колесо-шина». Когда левый задний узел 10RL «колесо-шина» представляет собой внешний поворотный узел «колесо-шина», целевой крутящий момент TqRL* поворота при рулении левого заднего узла 10RL «колесо-шина» увеличивается на величину dTqR изменения крутящего момента на стороне задних узлов «колесо-шина», а когда правый задний узел 10RR «колесо-шина» представляет собой внешний поворотный узел «колесо-шина», целевой крутящий момент TqRR* поворота при рулении правого заднего узла 10RR «колесо-шина» увеличивается на величину dTqR изменения крутящего момента на стороне задних узлов «колесо-шина». Как результат, положение ψ руления внешнего поворотного узла 10F «колесо-шина» на стороне передних узлов «колесо-шина» задается меньшим, и положение ψ руления внешнего поворотного узла 10R «колесо-шина» на стороне задних узлов «колесо-шина» задается большим таким образом, что характеристики поворачиваемости транспортного средства имеют более сильную тенденцию к недостаточной поворачиваемости.
[0071] В настоящей системе рулевого управления, рабочий ECU 18 указывает направление поворачивания транспортного средства на основе рабочего положения δ руля 56 и определяет то, какой из правых и левых узлов 10 «колесо-шина» должен представлять собой внешний поворотный узел «колесо-шина», на основе указанного направления поворачивания, а не крутящего момента Tq поворота при рулении каждого из правых и левых узлов 10 «колесо-шина». В настоящей системе рулевого управления, изменение величины dTq изменения крутящего момента поворота при рулении на основе ускорения/замедления транспортного средства, которое выполняется в системе рулевого управления первого варианта осуществления, не выполняется.
iii. Последовательность операций управления
[0072] Компьютер рабочего ECU 18 выполняет интегрированную управляющую программу для руления, проиллюстрированную посредством блок-схемы последовательности операций способа на фиг. 8, а компьютер каждого ECU 16 рулевого управления выполняет программу для руления узлом «колесо-шина», проиллюстрированную посредством блок-схемы последовательности операций способа на фиг. 9, с коротким циклом (например, от нескольких миллисекунд до нескольких десятков миллисекунд) таким образом, что выполняются базовое управление рулением и управление рулением, включающее в себя процесс изменения положения руления, описанный выше. Чтобы описывать управление рулением системы рулевого управления, ниже кратко описывается последовательность операций обработки согласно этим программам.
[0073] В процессе согласно интегрированной управляющей программе для руления, выполняемой в рабочем ECU 18, во-первых, на этапе S51, информация относительно скорости vW вращения узла «колесо-шина» для каждого узла 10 «колесо-шина» принимается из каждого ECU 16 рулевого управления, и на этапе S52, скорость v транспортного средства для транспортного средства указывается на основе скорости vW вращения узла «колесо-шина» для каждого узла 10 «колесо-шина». Затем, на этапе S53, рабочее положение δ руля 56 получается на основе определения датчика 58 руления, и на этапе S54, целевые положения ψF* руления передних узлов 10F «колесо-шина» и целевые положения ψR* руления задних узлов 10R «колесо-шина» определяются на основе полученного рабочего положения δ и указанной скорости v транспортного средства. После этого, на этапе S55, целевые углы θ* вращения электромотора для электромоторов 46a рулевого управления устройств 12 руления узлом «колесо-шина» определяются на основе целевых положений ψF* руления и целевых положений ψR* руления, и на этапе S56, информация относительно фактического угла θ вращения электромотора для электромотора 46a рулевого управления каждого устройства 12 руления узлом «колесо-шина» принимается из каждого ECU 16 рулевого управления. На следующем этапе S57, отклонение Δθ угла вращения электромотора для каждого электромотора 46a рулевого управления определяется, и на этапе S58, целевые крутящие моменты TqFL*, TqFR*, TqRL*, TqRR* поворота при рулении для электромоторов 46a рулевого управления устройств 12 руления узлом «колесо-шина» определяются согласно вышеприведенному уравнению.
[0074] На следующем этапе S59, поперечное ускорение Gy получается на основе определения датчика 68 поперечного ускорения, и на этапе S60, определяется то, превышает или нет поперечное ускорение Gy пороговое ускорение Gy0. Когда определяется то, что поперечное ускорение Gy превышает пороговое ускорение Gy0, процесс изменения положения руления начиная с S61 выполняется, и когда определяется то, что поперечное ускорение Gy равно или меньше порогового ускорения Gy0, процесс изменения положения руления пропускается.
[0075] В процессе изменения положения руления, направление поворачивания транспортного средства указывается на этапе S61 на основе полученного рабочего положения δ руля 56, и на этапе S62 определяется то, представляет указанное направление поворачивания транспортного средства собой направление влево или направление вправо. Когда транспортное средство поворачивает налево, целевой крутящий момент TqFR* поворота при рулении правого переднего узла 10FR «колесо-шина» уменьшается на величину dTqF изменения крутящего момента на стороне передних узлов «колесо-шина» на этапе S63, и целевой крутящий момент TqRR* поворота при рулении правого заднего узла 10RR «колесо-шина» увеличивается на величину dTqR изменения крутящего момента на стороне задних узлов «колесо-шина» на этапе S64. Когда транспортное средство поворачивает направо, целевой крутящий момент TqFL* поворота при рулении левого переднего узла 10FL «колесо-шина» уменьшается на величину dTqF изменения крутящего момента на стороне передних узлов «колесо-шина» на этапе S65, и целевой крутящий момент TqRL* поворота при рулении левого заднего узла 10RL «колесо-шина» увеличивается на величину dTqR изменения крутящего момента на стороне задних узлов «колесо-шина» на этапе S66.
[0076] Целевые крутящие моменты TqFL*, TqFR*, TqRL* и TqRR* поворота при рулении для электромоторов 46a рулевого управления устройств 12 руления узлом «колесо-шина», определенные на этапе S58 или измененные на этапе S63-S66, соответственно, передаются в ECU 16 рулевого управления в качестве информации на этапе S67.
[0077] В процессе согласно программе для руления узлом «колесо-шина», выполняемой в каждом ECU 16 рулевого управления, во-первых, на этапе S71, скорость vW вращения узла «колесо-шина» указывается на основе фактического угла θ вращения электромотора для электромотора 46a рулевого управления. После этого, информация относительно скорости vW вращения узла «колесо-шина» передается в рабочий ECU 18 на этапе S72, и информация относительно фактического угла θ вращения электромотора передается в рабочий ECU 18 на этапе S73.
[0078] На следующем этапе S74, информация относительно целевого крутящего момента Tq* поворота при рулении получается из рабочего ECU 18, и на этапе S75, целевой питающий ток I*, который представляет собой ток, который должен подаваться в электромотор 46a рулевого управления, определяется на основе целевого крутящего момента Tq* поворота при рулении. После этого, на этапе S76, ток I на основе целевого питающего тока I* подается в электромотор 46a рулевого управления.
Модификация
[0079] Система рулевого управления второго варианта осуществления имеет такую конфигурацию, в которой, когда поворот является серьезным, положение ψ руления одного из правого и левого передних узлов 10F «колесо-шина» и положение ψ руления одного из правого и левого задних узлов 10R «колесо-шина» изменяются. Тем не менее, система рулевого управления согласно настоящему изобретению может иметь такую конфигурацию, в которой положение ψ руления только одного из правого и левого задних узлов 10R «колесо-шина» изменяется.
[0080] Как система рулевого управления первого варианта осуществления, так и система рулевого управления второго варианта осуществления имеют такую конфигурацию, в которой когда поворот является серьезным, положение ψ руления узла 10 «колесо-шина» изменяется посредством изменения целевого крутящего момента Tq* поворота при рулении. Тем не менее, система рулевого управления настоящего изобретения, например, может иметь такую конфигурацию, в которой положение ψ руления узла 10 «колесо-шина» изменяется посредством изменения одного или более из целевого положения ψ* руления, целевого угла θ* вращения электромотора и целевого питающего тока I*.
[0081] Как система рулевого управления первого варианта осуществления, так и система рулевого управления второго варианта осуществления имеют такую конфигурацию, в которой положение ψ руления внешнего поворотного узла «колесо-шина», когда поворот является серьезным, изменяется. Тем не менее, система рулевого управления настоящего изобретения может иметь такую конфигурацию, в которой положение ψ руления внутреннего узла «колесо-шина» изменяется.
[0082] Как система рулевого управления первого варианта осуществления, так и система рулевого управления второго варианта осуществления имеют такую конфигурацию, в которой, при базовом управлении рулением, целевой крутящий момент Tq* поворота при рулении определяется на основе отклонения Δθ угла вращения электромотора, и целевой питающий ток I* определяется на основе целевого крутящего момента Tq* поворота при рулении. Тем не менее, система рулевого управления настоящего изобретения может иметь такую конфигурацию, в которой целевой питающий ток I* непосредственно определяется на основе отклонения Δθ угла вращения электромотора.
[0083] Как в системе рулевого управления первого варианта осуществления, так и в системе рулевого управления второго варианта осуществления, целевые положения ψ* руления правых и левых узлов 10 «колесо-шина», которые определяются при базовом управлении рулением, конкретно не упоминаются. Тем не менее, система рулевого управления настоящего изобретения может иметь такую конфигурацию, в которой целевые положения ψ* руления правых и левых узлов 10 «колесо-шина» определяются как имеющие, например, идентичное значение согласно параллельной геометрии или, например, различные значения согласно геометрии Аккермана.
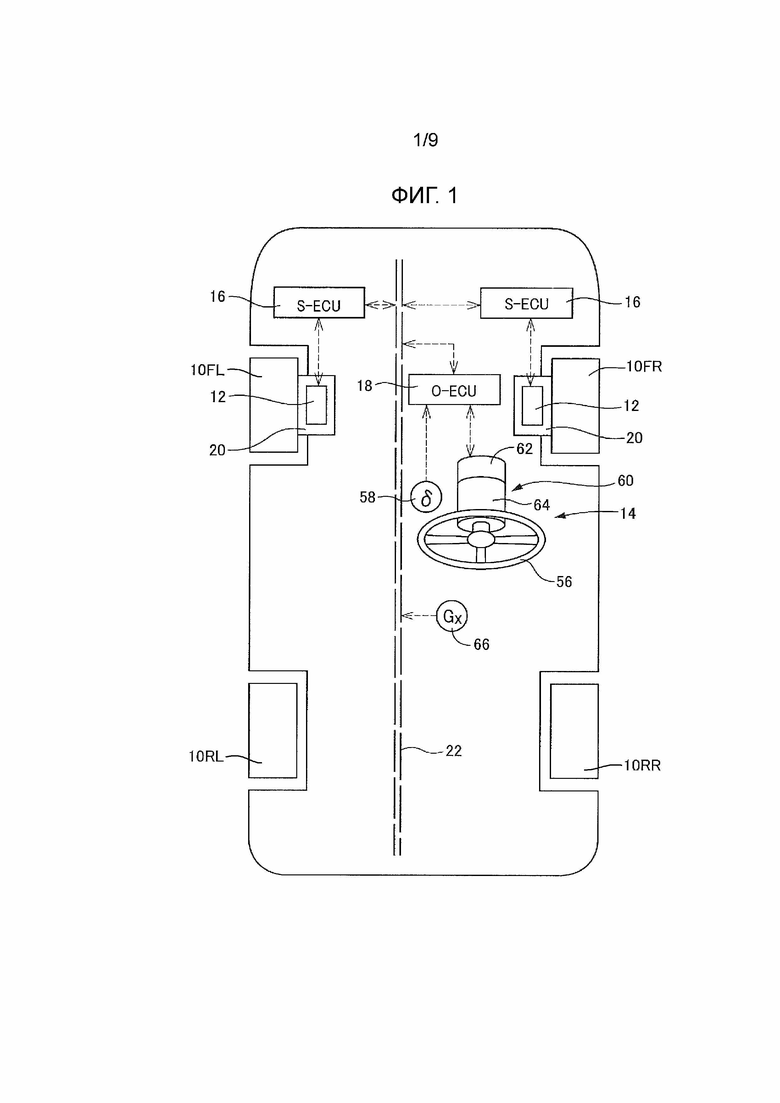
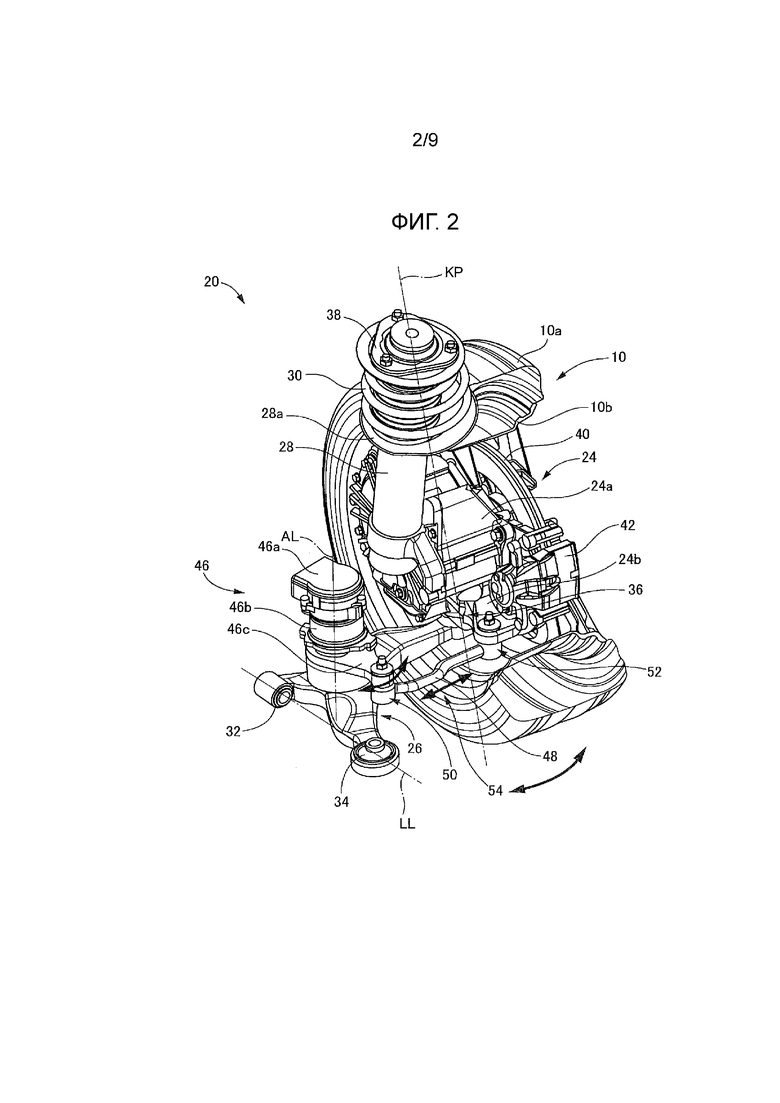
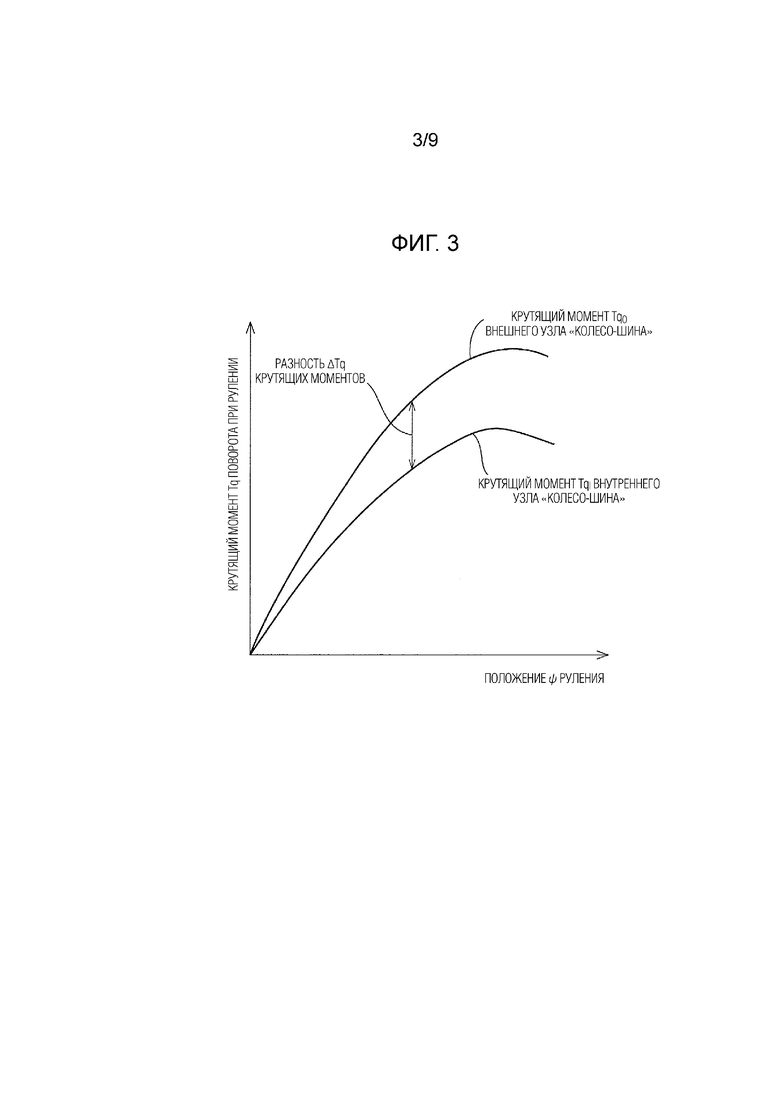
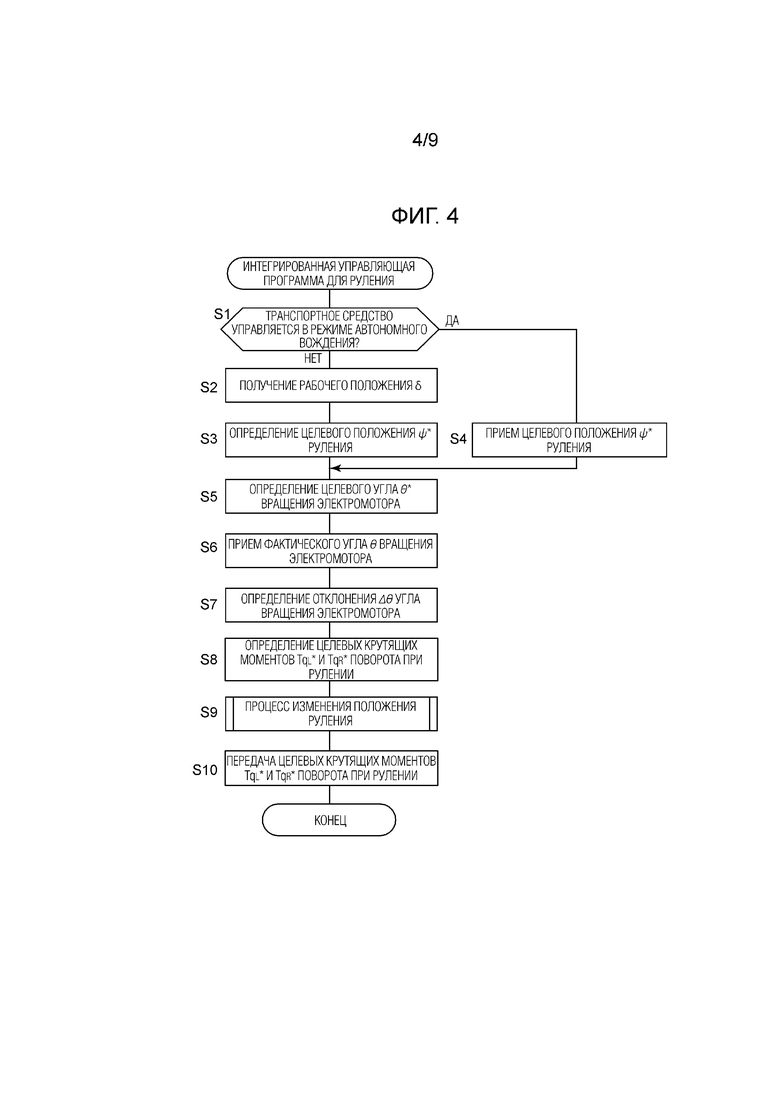
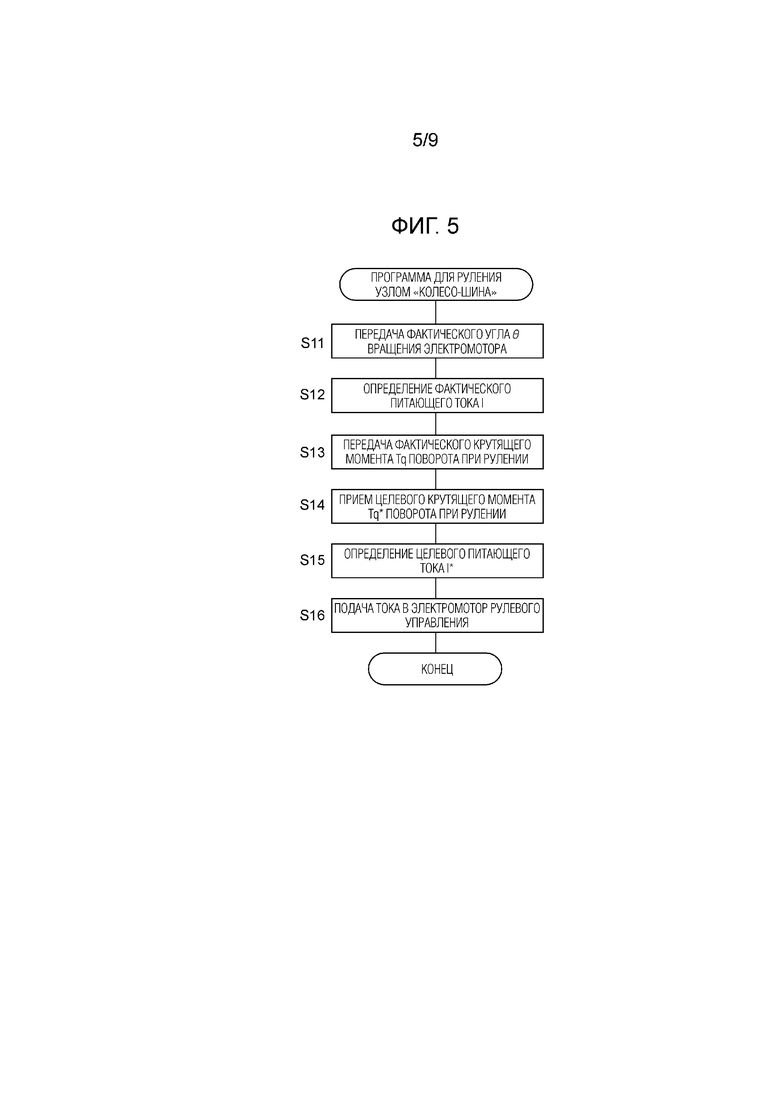
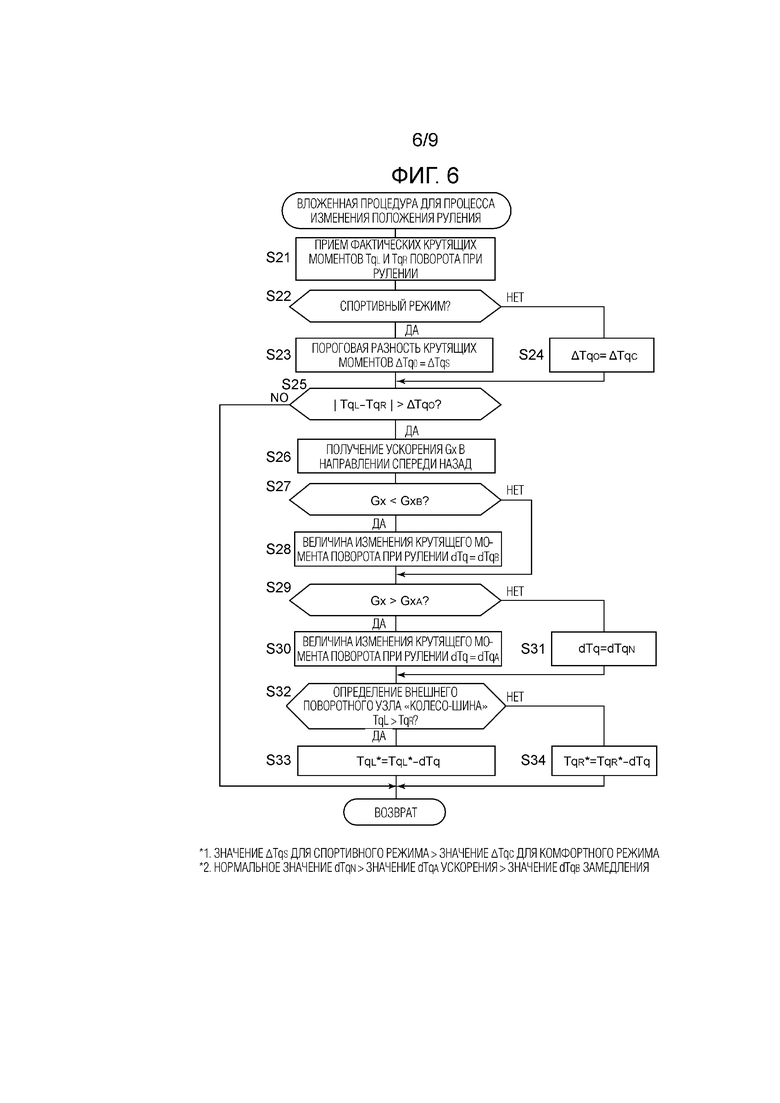
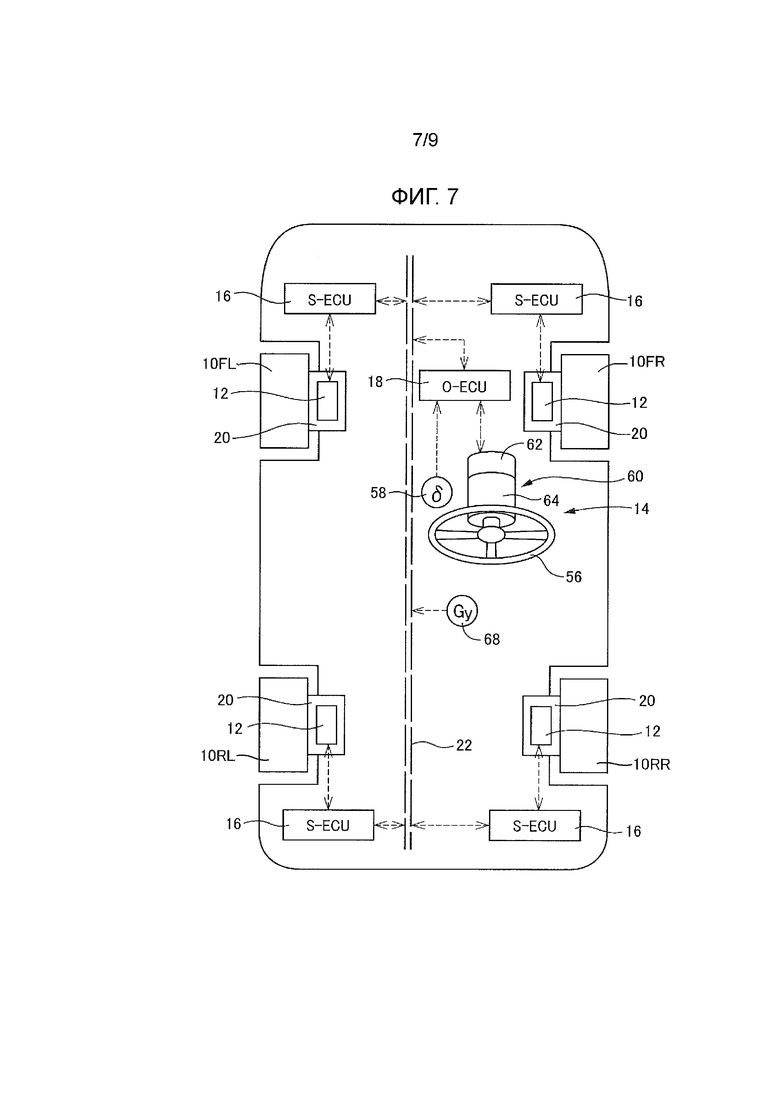
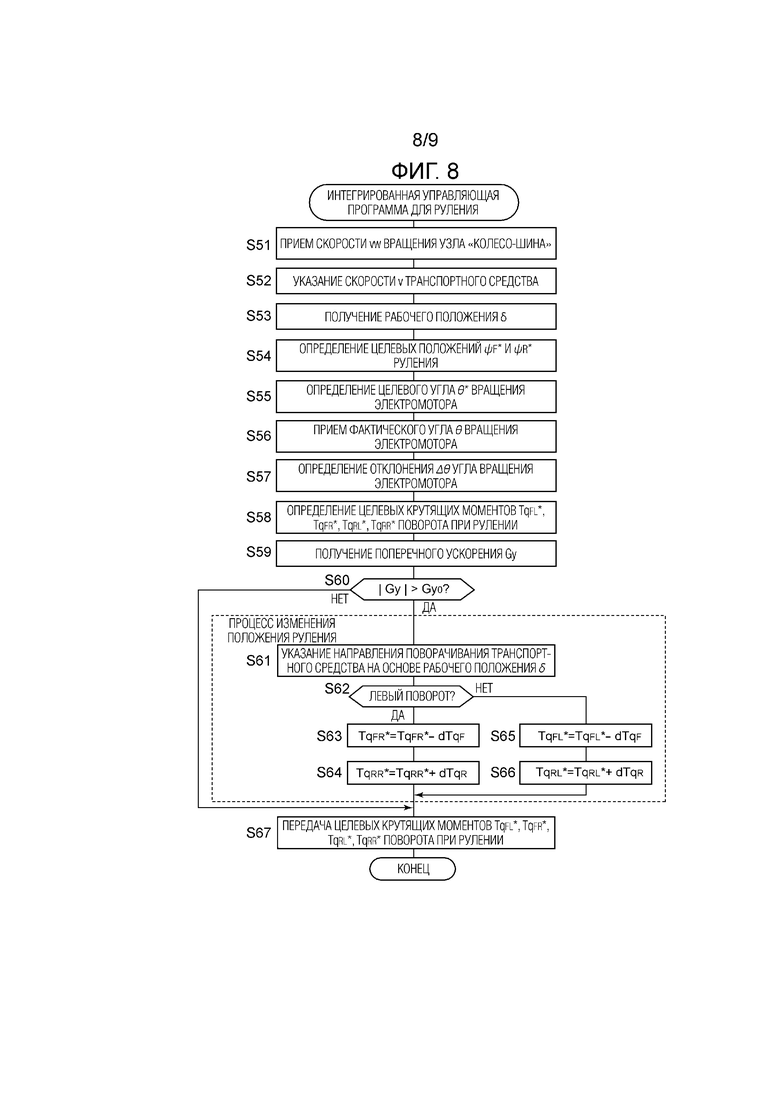
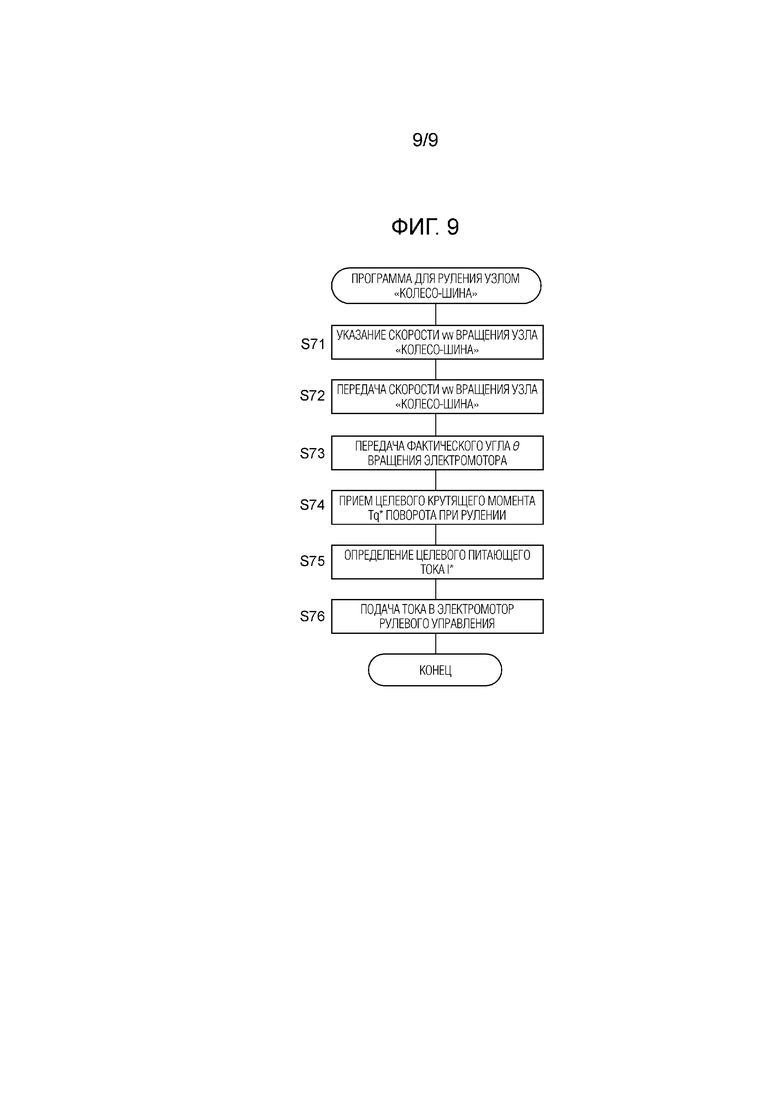
Изобретение относится к системе рулевого управления транспортного средства. Система включает в себя первое устройство руления узлом «колесо-шина», второе устройство руления узлом «колесо-шина» и контроллер. Контроллер выполнен с возможностью управлять первым устройством руления узлом «колесо-шина» и вторым устройством руления узлом «колесо-шина» таким образом, что положение руления каждого из правого узла «колесо-шина» и левого узла «колесо-шина» совпадает с целевым положением руления. Контроллер выполнен с возможностью выполнять, когда индекс поворота, указывающий серьезность поворота, превышает заданное пороговое значение, процесс изменения положения руления для изменения положения руления одного из правых узлов «колесо-шина» и левых узлов «колесо-шина» таким образом, что характеристики поворачиваемости транспортного средства имеют более сильную тенденцию к недостаточной поворачиваемости по сравнению со случаем, в котором индекс поворота не превышает заданное пороговое значение. Обеспечивается повышение устойчивости при повороте. 10 з.п. ф-лы, 9 ил.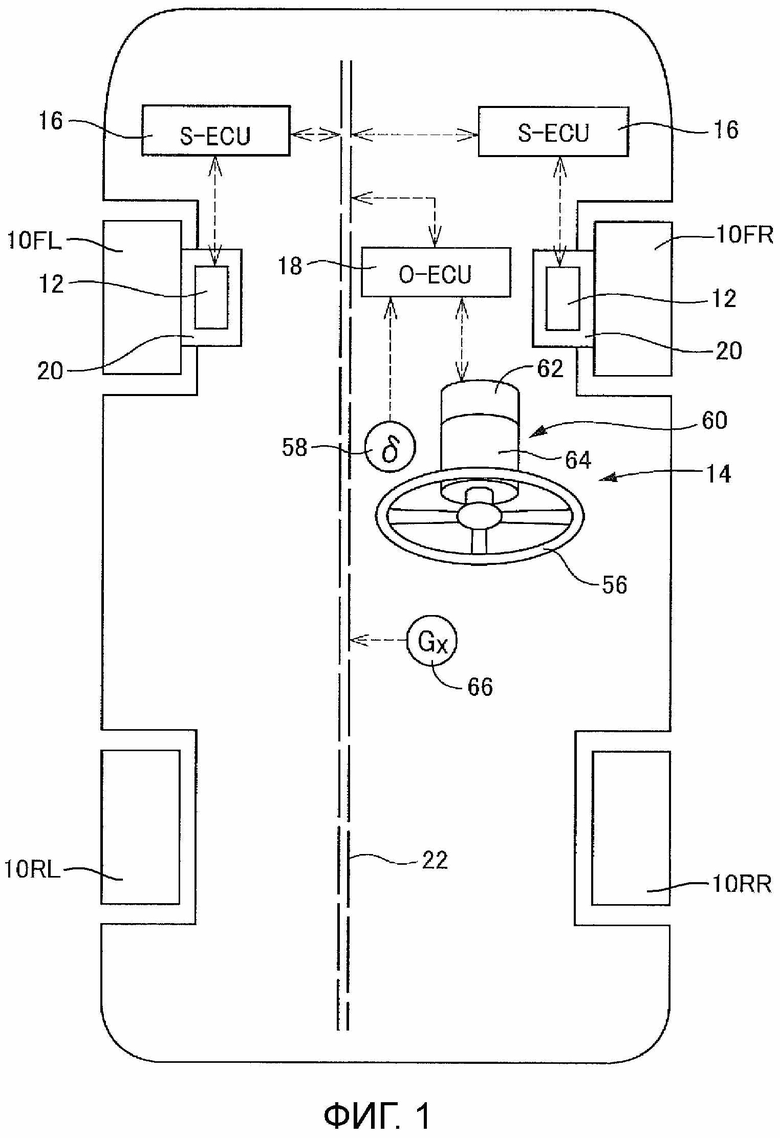
1. Система рулевого управления транспортного средства, содержащая:
первое устройство руления узлом «колесо-шина», выполненное с возможностью руления левым узлом «колесо-шина» транспортного средства;
второе устройство руления узлом «колесо-шина», выполненное с возможностью руления правым узлом «колесо-шина» транспортного средства; и
контроллер, выполненный с возможностью:
- определения целевого положения руления, которое представляет собой положение руления, намеченное для реализации в каждом из правого узла «колесо-шина» и левого узла «колесо-шина», на основе запроса на руление в транспортное средство,
- управления первым устройством руления узлом «колесо-шина» и вторым устройством руления узлом «колесо-шина» таким образом, что положение руления каждого из правого узла «колесо-шина» и левого узла «колесо-шина» совпадает с целевым положением руления,
при этом, когда индекс поворота, указывающий серьезность поворота, превышает заданное пороговое значение, контроллер выполнен с возможностью осуществления процесса изменения положения руления для изменения положения руления одного из правого узла «колесо-шина» и левого узла «колесо-шина» таким образом, что характеристики поворачиваемости транспортного средства имеют более сильную тенденцию к недостаточной поворачиваемости по сравнению со случаем, когда индекс поворота не превышает указанное заданное пороговое значение.
2. Система рулевого управления транспортного средства по п. 1, в которой один из правого узла «колесо-шина» и левого узла «колесо-шина» представляет собой внешний поворотный узел «колесо-шина».
3. Система рулевого управления транспортного средства по п. 1 или 2, в которой:
транспортное средство имеет четыре узла «колесо-шина», включающих в себя правый передний, левый передний, правый задний и левый задний узлы «колесо-шина», причем правый узел «колесо-шина» и левый узел «колесо-шина» представляют собой правый передний узел «колесо-шина» и левый передний узел «колесо-шина»; и
контроллер выполнен с возможностью задания положения руления одного из правого переднего узла «колесо-шина» и левого переднего узла «колесо-шина» меньшим в процессе изменения положения руления.
4. Система рулевого управления транспортного средства по п. 1 или 2, в которой:
транспортное средство имеет четыре узла «колесо-шина», включающих в себя правый передний, левый передний, правый задний и левый задний узлы «колесо-шина», причем правый узел «колесо-шина» и левый узел «колесо-шина» представляют собой правый задний узел «колесо-шина» и левый задний узел «колесо-шина»; и
контроллер выполнен с возможностью задания положения руления одного из правого узла «колесо-шина» и левого заднего узла «колесо-шина» большим в процессе изменения положения руления.
5. Система рулевого управления транспортного средства по п. 1 или 2, в которой контроллер выполнен с возможностью управления силами поворота при рулении, сгенерированными посредством первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина», чтобы осуществлять управление таким образом, что положение руления каждого из правого узла «колесо-шина» и левого узла «колесо-шина» совпадает с целевым положением руления.
6. Система рулевого управления транспортного средства по п. 5, в которой:
первое устройство руления узлом «колесо-шина» включает в себя первый электромотор, служащий в качестве источника приведения в движение, и первый механизм преобразования движения, выполненный с возможностью преобразования движения первого электромотора в движение при рулении узла «колесо-шина»;
второе устройство руления узлом «колесо-шина» включает в себя второй электромотор, служащий в качестве источника приведения в движение, и второй механизм преобразования движения, выполненный с возможностью преобразования движения второго электромотора в движение при рулении узла «колесо-шина»; и
контроллер выполнен с возможностью управления питающим током в каждый из первого электромотора и второго электромотора, чтобы управлять силами поворота при рулении, сгенерированными посредством первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина».
7. Система рулевого управления транспортного средства по п. 5, в которой контроллер выполнен с возможностью изменения силы поворота при рулении первого устройства руления узлом «колесо-шина» или второго устройства руления узлом «колесо-шина», которое выполнено с возможностью руления одним из правого узла «колесо-шина» и левого узла «колесо-шина» таким образом, чтобы изменять положение руления одного из правого узла «колесо-шина» и левого узла «колесо-шина» в процессе изменения положения руления.
8. Система рулевого управления транспортного средства по п. 1 или 2, в которой контроллер выполнен с возможностью:
сравнения сил поворота при рулении, сгенерированных посредством первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина»; и
распознавания, в качестве внешнего поворотного узла «колесо-шина», узла «колесо-шина», управляемого рулением посредством одного из первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина», причем одно из первого устройства руления узлом «колесо-шина» и второго устройства руления узлом «колесо-шина» формирует большую силу поворота при рулении.
9. Система рулевого управления транспортного средства по п. 1 или 2, в которой индекс поворота представляет собой разность между силой поворота при рулении, сгенерированной посредством первого устройства руления узлом «колесо-шина», и силой поворота при рулении, сгенерированной посредством второго устройства руления узлом «колесо-шина».
10. Система рулевого управления транспортного средства по п. 1 или 2, в которой контроллер выполнен с возможностью изменения заданного порогового значения.
11. Система рулевого управления транспортного средства по п. 1 или 2, в которой контроллер выполнен с возможностью изменения величины изменения положения руления одного из правого узла «колесо-шина» и левого узла «колесо-шина» в процессе изменения положения руления.
| JP 2009101858 A, 14.05.2009 | |||
| US 2019217884 A1, 18.07.2019 | |||
| US 2005149243 A1, 07.07.2005 | |||
| JP 2013159201 A, 19.08.2013. |

