Изобретение относится к области медицинской техники и может быть использовано для измерения и мониторинга амплитудных и частотно-временных характеристик дыхания.
Как известно повышение эффективности физиотерапевтических методов связано с оперативным контролем и мониторингом различных процессов жизнедеятельности, в том числе, таким как дыхание. При физиотерапии дополнительным ограничением является исключение или снижение до допустимого максимума взаимовлияния физиотерапевтического устройства и систем измерения показателей жизненно важных функций организма, что при измерении параметров дыхания в ходе магнитотерапии автоматически исключают способы, использующие ультразвуковое и радиочастотное зондирование.
Известен способ для измерения параметров дыхания и устройство для его осуществления [1] позволяющий регистрировать перемещение грудной клетки в процессе дыхания неинвазивно и комфортно для пациента за счет использования оптического сканирующего датчика, расположенного в направляющей и регистрирующего перемещение участка не растяжимого шнура, опоясывающего грудную клетку пациента, и связанного с кушеткой упругим элементом. Основная идея способа заключается в том, что упругий элемент растягивается при вдохе и сжимается при выдохе, а участок не растяжимого шнура осуществляет перемещение, которое непрерывно во времени регистрируется оптическим сканирующим датчиком. Однако наличие опоясывающего шнура создает ощущение «привязанности» к кушетке у пациента, что может вызвать ощущения дискомфорта, наличие упругого элемента заставляет пациента прикладывать дополнительные усилия на его растяжение в процессе дыхания.
Также существует способ дистанционной регистрации процесса дыхания пациента и устройство для его осуществления [2], где регистрация процесса дыхания пациента, проходящего магнитотерапию, осуществляется за счет захвата с помощью веб-камеры изображения метки, закрепленной на груди пациента. В процессе дыхания координаты местоположения метки изменяются, анализ последовательности изменения координат позволяет сформировать сигнал, описывающий движение грудной клетки обусловленное дыханием. К недостаткам такого подхода следует отнести необходимость наличия специальных алгоритмов обработки видеоизображения, в том числе решении задач распознавания метки и определения ее координат. Отдельным вопросом стоит требования в обеспечении заданного уровня освещенности метки, что является дополнительной проблемой при проведении магнитотерапии в закрытой кушетке.
Известны сведения [3] о разработке устройства, реализующего для регистрации частоты дыхания и сердечных сокращений плетизмографический метод с использованием магнитного датчика. В устройстве постоянный магнит оптимального типоразмера помещается на мембрану, соприкасающуюся с кожей, а измерение магнитного поля осуществляется с помощью датчика Холла. В результате совершения дыхательных движений происходят малые линейные перемещения кожи под магнитом, и, как следствие, меняется магнитное поле вокруг датчика Холла, который при этом неподвижен. Однако, как и у всех плетизмографических методов, есть ограничения на применимость для пациентов с высоким содержание подкожной жировой ткани в виду ее низкого кровенаполнения. Также недостатком является высокое требование к точности измерения, обусловленное низкими амплитудами перемещений мембраны при изменении кровенаполнение подкожной ткани. Дополнительная проблема связана со сложностью математического аппарата, обеспечивающего выделение информации о дыхании на основе данных плетизмограммы. Применение устройства также недопустимо при магнитотерапии из-за влияния магнитного поля магнитотерапевтического аппарата на показания датчика Холла устройства.
В качестве варианта измерения параметров дыхания в патенте респираторные мониторы и методы мониторинга [4] предлагается использовать пару закрепленных на поверхности тела человека датчиков, например, акселерометра и магнитометра. Указанные датчики позволяют определить направление гравитационного и магнитного полей земли. А по их показаниям фиксируется факт изменения пространственного положения грудной клетки, на которой датчики крепятся. Вариант применим, когда значения гравитационного и магнитного полей земли не меняются, а все изменения фиксируемые датчиками определяются только изменением ориентации датчиков относительно направлений (векторов) полей земли. В условиях искусственного магнитного поля использование способа не возможно, так, вследствие движения грудной клетки с закрепленными датчиками, происходит перемещение датчика относительно источника магнитного поля, что приводит к изменениям не только направления, но и модуля магнитного поля.
В работе [5] выполняется оценка дыхания с использованием сигналов датчиков позы и диафрагмы. Измерения выполняются с помощью датчика угла, в качестве которого может быть использован акселерометр, магнитометр, гироскоп или любой другой датчик, позволяющий получить значение углового положения или наклона, путем регистрация относительного изменения положения диафрагмы. Реализация способа требует выполнения дополнительных преобразований по интегрированию сигнала с датчика и предполагает фиксированное значение модуля регистрируемой величины, в результате чего положение диафрагмы в этом случае будет определяться за счет изменения вектора измеряемой величины. Так указанные сложности затрудняют использовать способ в условиях искусственных магнитных полей в случае применения датчиков магнитного поля, а также получения абсолютных значений параметров дыхания.
Наиболее близким к заявленному является способ дистанционного исследования функции дыхания и устройство для его осуществления [6], согласно которому обследуемый располагается в пространстве электромагнитного поля метрового диапазона, а экраном с матрицей датчиков производятся измерения параметров поля, при этом экран располагают на дистанции не менее L (см) до наиболее выступающей зоны передней стенки туловища. Движение грудной клетке фактически приводит к модуляции исходного электромагнитного поля. Сигнал с датчика после демодуляции, фильтрации и обработки рассматривается как функция времени, отображающая биомеханику одной из зон туловища, определяемую передне-задним движением грудной клетки. Обязательным этапом способа является калибровка при пошаговом параллельном перемещения экрана в измеряемом пространстве, а также интерполяция и экстраполяция цифровых величин при вычислении параметров дыхания. Основным недостатком является использование искусственного электромагнитного излучения, которое не допустимо при проведении магнитотерапии. Кроме того, большое количество датчиков (не менее 64) избыточно для решения задачи регистрации частотно-временных параметров процесса дыхания.
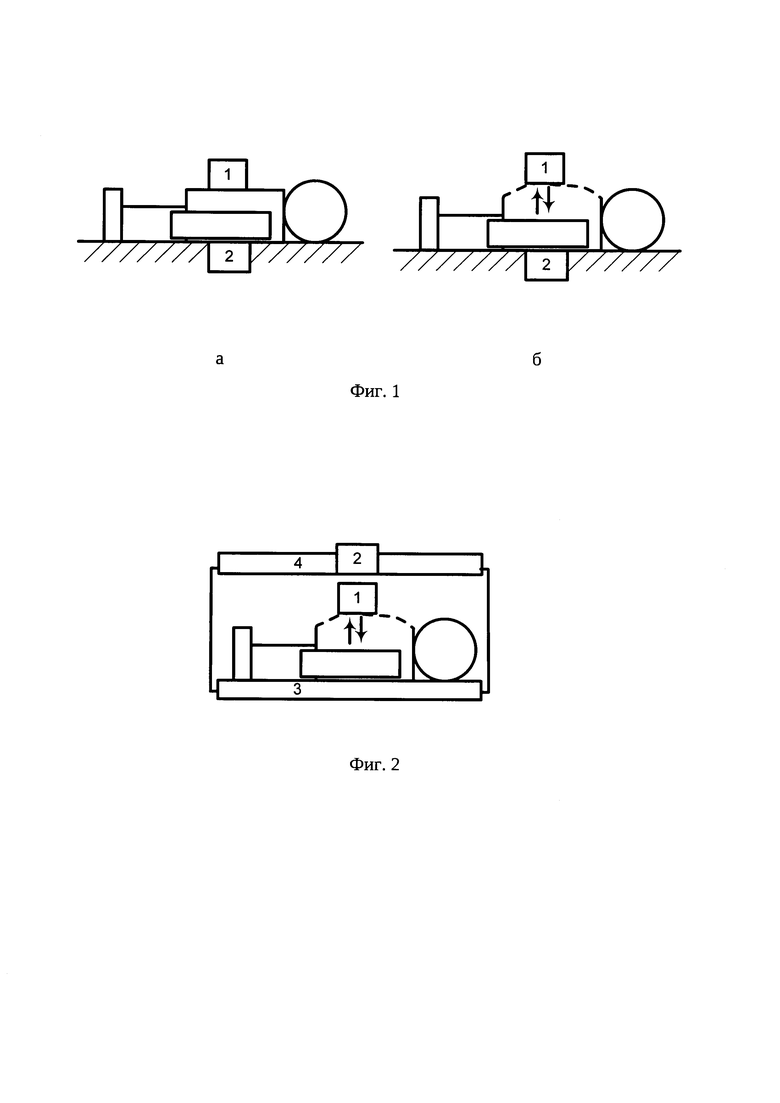
Предлагаемый способ заключается в регистрации движения грудной клетки, обусловленного дыхательной деятельностью пациента, путем использования искусственного источника магнитного поля 2 (фиг. 1) и непрерывного измерения этого поля с помощью датчика магнитного поля 1, закрепленного на поверхности грудной клетки пациента, с последующим вычислением разности между базовым значением магнитного поля, зафиксированным датчиком магнитного поля 1 при задержке дыхания пациента (фиг. 1, а), и значением магнитного поля, измеряемым датчиком магнитного поля при дыхании пациента (фиг. 1, б).
Источник искусственного магнитного поля 2 должен быть жестко зафиксирован относительно пациента. Применение способа предполагает, что все характеристики используемого искусственного магнитного поля известны, а пациент находится в состоянии покоя, когда движение грудной клетки, обусловлено только дыхательной деятельностью пациента.
Для получения максимальной разности между значениями магнитного поля, измеряемыми при искусственной задержке дыхания и в процессе дыхательной деятельности, датчик следует крепить в точке поверхности грудной клетки, совершающей наиболее амплитудные движения при дыхании. Источник магнитного поля рекомендуется расположить на линии движения датчика магнитного поля так, чтобы датчик перемещался перпендикулярно относительно эквипотенциальных поверхностей магнитного поля. Однако отклонение от перпендикулярного перемещения хотя и снизит амплитуду рассчитываемой зависимости, но не повлияет на точность расчета частоты дыхания, а также на возможность расчета изменения глубины дыхания. Наиболее предпочтительным регистрируемым параметром магнитного поля является модуль вектора магнитной индукции, так как использование этой характеристики магнитного поля исключает зависимость ориентации положения датчика относительно направления силовых линий магнитного поля.
В предлагаемом способе может быть использован как источник постоянного поля, так и источник переменного магнитного поля. Однако применение переменного магнитного поля требует использования вместо базового значения базовой зависимости изменения магнитного поля, регистрируемой при искусственной задержке дыхания в течение интервала времени, кратного периоду изменения магнитного поля.
Способ в первую очередь ориентирован на применение в условиях магнитотерапевтической процедуры, когда создаваемое магнитотерапевтическим аппаратом искусственное магнитное поле одновременно является воздействующим фактором физиотерапии и измеряется датчиком магнитного поля, с целью последующего определения параметров дыхания.
Вариантом способа является замена измеряемого базового значения или базовой зависимости магнитного поля при задержке дыхания на расчетное значение или зависимость магнитного поля для одного из положений датчика магнитного поля. Учитывая, что конструкция, характеристики и местоположение источника искусственного магнитного поля относительно датчика известны, то расчет магнитного поля в фиксированной точке расположения датчика магнитного поля следует рассматривать как тривиальную (решаемую) задачу.
Одна из практических реализаций может быть построена на базе магнитотерапевтического аппарата КАП-МТ/8-«МУЛЬТИМАГ» [7]. В этом устройстве используются управляемые источники искусственного магнитного поля 2 (индукторы-электромагниты), расположенные либо в кушетке 3, либо крышки 4 устройства (фиг. 2).
Аппарат «Мультимаг» оснащен возможностью регулировки расстояния между кушеткой и крышкой с учетом габаритов пациента, что обеспечивает возможность установки минимального расстояния между датчиком магнитного поля 1 закрепленного на поверхности грудной клетки и крышкой 4 со встроенным в нее источником искусственного магнитного поля 2 (индуктор-электромагнит). Минимальное расстояние между датчиком и источником магнитного поля обеспечивает высокий уровень измеряемого сигнала. Кроме того, указанный аппарат оснащен микроконтроллерным блоком управления, что позволит синхронизировать процессы генерации и измерения магнитного поля в случае использования переменных магнитных полей. В качестве трехкоординатного датчика магнитного поля, позволяющего измерять модуль магнитной индукции в диапазоне магнитных полей, формируемых аппаратом «Мультимаг», может быть использован элемент типа TLV493D (Infineon Technologies).
Таким образом, способ позволяет неинвазивно регистрировать дыхание в комфортных для пациента условиях при наличии искусственного магнитного поля, в том числе при проведении магнитотерапевтической процедуры.
Литература
1. Патент RU 2634632 С2, МПК А61В 5/083, (2006.01).
2. Патент RU 2766046 С1, МПК А61В 5/00(2006.01), СПК А61В 5/00 (2021.08).
3. Косоруков А.Е., Никулина С.И. Разработка биотехнической системы механоплетизмографии с магнитным датчиком для регистрации частоты дыхания и сердечных сокращений // StudNet. - 2021. - Т. 4. - 7. - С. 1473-1488.
4. ЕР 2278918 В1, (17.01.2018).
5. US 20150342518 А1, (03.12.2015).
6. Патент RU 2496532 С2, кл. A61N 2/04, 2011.
7. Официальный сайт Касимовского приборного завода. Физиотерапевтическое оборудование /КАП-МТ/8-«МУЛЬТИМАГ» https://kaspz.m/catalog/fizioterapevticheskoe-oboradov/kap-mt-8-multimag.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОЙ РЕГИСТРАЦИИ ПРОЦЕССА ДЫХАНИЯ ПАЦИЕНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2766046C1 |
| СПОСОБ ПРОФИЛАКТИКИ СТРЕССОГЕННЫХ РАССТРОЙСТВ ЧЕЛОВЕКА | 2011 |
|
RU2469755C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАГНИТОТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2732481C1 |
| СПОСОБ МАГНИТОТЕРАПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2302269C2 |
| СПОСОБ ОЦЕНКИ УСТОЙЧИВОСТИ ПЛОДА К ГИПОКСИИ ПО М.Ю. ГАУСКНЕХТ | 2010 |
|
RU2432118C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ДЫХАТЕЛЬНЫХ ПУТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2141349C1 |
| АППАРАТ ДЛЯ МЕХАНИЧЕСКОЙ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ И МОНИТОРИНГА ДЫХАНИЯ | 2017 |
|
RU2737295C2 |
| СПОСОБ ФОРМИРОВАНИЯ МАГНИТОТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2496532C2 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634632C2 |
| ОТСЛЕЖИВАНИЕ ДВИЖЕНИЯ В МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДАРА И СИСТЕМЫ ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЯ | 2019 |
|
RU2784922C2 |
Изобретение относится к медицинской технике, а именно к устройствам для измерения и мониторинга амплитудных и частотно-временных характеристик дыхания. Способ регистрации дыхания пациента в условиях искусственного магнитного поля заключается в регистрации движения грудной клетки, обусловленного дыхательной деятельностью пациента, в условиях наличия искусственного магнитного поля, формируемого источником магнитного поля с известными характеристиками и жестко зафиксированного относительно пациента, путем измерения модуля вектора магнитной индукции, с помощью датчика магнитного поля, закрепленного на поверхности грудной клетки пациента, с последующим вычислением разности базового значения модуля вектора магнитной индукции, зафиксированного при задержке дыхания пациента, и модуля вектора магнитной индукции, измеряемого датчиком магнитного поля при дыхании пациента. Техническим результатом является неинвазивная регистрация дыхания пациента при наличии искусственного магнитного поля, в том числе при проведении магнитотерапевтической процедуры. 2 з.п. ф-лы, 1 ил.
1. Способ регистрации дыхания пациента в условиях искусственного магнитного поля, заключающийся в регистрации движения грудной клетки, обусловленного дыхательной деятельностью пациента, в условиях наличия искусственного магнитного поля, формируемого источником магнитного поля с известными характеристиками и жестко зафиксированного относительно пациента, путем измерения модуля вектора магнитной индукции, с помощью датчика магнитного поля, закрепленного на поверхности грудной клетки пациента, с последующим вычислением разности, базового значения модуля вектора магнитной индукции, зафиксированного при задержке дыхания пациента, и модуля вектора магнитной индукции, измеряемого датчиком магнитного поля при дыхании пациента.
2. Способ по п. 1, отличающийся тем, что базовое значение модуля вектора магнитной индукции фиксируется путем предварительного измерения модуля вектора магнитной индукции при задержке дыхания пациента.
3. Способ по п. 1, отличающийся тем, что базовое значение модуля вектора магнитной индукции фиксируется путем предварительного расчета магнитной индукции на основе известных значений характеристик источника магнитного поля для расстояния между датчиком и источником магнитного поля, соответствующего моменту задержки дыхания пациента.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ОБНАРУЖЕНИЕ НАРУШЕНИЙ У ПАЦИЕНТА | 2012 |
|
RU2603052C2 |
| СПОСОБ ФОРМИРОВАНИЯ МАГНИТОТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2496532C2 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634632C2 |
| СПОСОБ ДИСТАНЦИОННОЙ РЕГИСТРАЦИИ ПРОЦЕССА ДЫХАНИЯ ПАЦИЕНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2766046C1 |

