Изобретение относится к области средств наблюдения и слежения за полетами космических аппаратов (КА) и может быть использовано для создания систем управления целевым применением орбитальной группировки космических аппаратов дистанционного зондирования Земли (ДЗЗ), состоящих из КА одного или различных типов. Под целевым применением в предложенном способе понимается проведение съемки земной поверхности в различных диапазонах волнового спектра КА и доставка результатов съемки в центры обработки путем передачи результатов съемки с помощью наземных пунктов приема информации.
Заявленный способ может применяться для управления одним космическим аппаратом, однако достоинства способа управления способствуют повышению эффективности применения именно многоспутниковых систем КА ДЗЗ.
Из уровня техники известны способ и наземный комплекс приема, обработки, архивации и распространения информации космической системы «Метеор-3М» [1 - Дистанционное зондирование Земли. Справочные материалы. Выпуск 1. Космическая система «Метеор-3М» / Под ред. Г.М. Полищука и др. // Санкт-Петербург, Гидрометиздат, 2001], получаемой в результате обработки данных космической съемки бортовой аппаратурой КА в различных спектральных диапазонах. К существенным недостаткам способа следует отнести следующие: заявки на проведение съемки обрабатываются в неавтоматизированном режиме; отсутствует информационное взаимодействие с информационными системами, осуществляющими координацию и управление применением космических средств ДЗЗ.
Известен [2 - патент 2552109, МПК Н04Н 60/68. Многофункциональный наземный комплекс приема, обработки и распространения информации дистанционного зондирования Земли (МНКПОР ДЗЗ). Шишанов А.В., Заичко В.А., Ромашкин В.В., Лошкарев П.А., Макеров А.И., Тохиян О.О., Синькевич М.Е., опубл. 10.06.2015], в котором реализуются комплексные подходы обеспечения космической информацией конечных потребителей. Технический результат состоит в возможности создания информационных моделей, структур и технологий, отражающих процессы выполнения заявок потребителя на информацию ДЗЗ с учетом разнотипных космических средств, а также возможность единого подхода в проектировании и создании наземных средств разнотипных космических систем ДЗЗ, обеспечивающих планирование, прием, обработку и распространение информации ДЗЗ. Класс изобретений Н04Н 60/68, к которому отнесен способ, охватывает системы, специально предназначенные для использования особой информации, например, географических или метеорологических данных.
Известен способ [3 - патент 2646370, МПК G06F 17/00. Способ автоматизированного создания и использования базы электронных информационных данных дистанционного зондирования Земли и многофункциональный наземный комплекс для его осуществления. Шишанов А.В., Заичко В.А., Ромашкин В.В., Лошкарев П.А., Макеров А.И., Тохиян О.О., Поселяничев В.П. и Синькевич М.Е., опубл. 02.03.2018]. Класс изобретений G06F 17/00, к которому отнесен способ, охватывает системы, оборудование или способы обработки данных или цифровых вычислений, специально предназначенные для особых функций (информационный поиск, структуры баз данных или структуры файловых систем).
Способ является развитием способа по патенту [2], и направлен на преодоление отставания используемых технологий применения от возрастающих требований комплексного подхода к выполнению заявок потребителей на информацию ДЗЗ с использованием доступных космических средств различного назначения. Техническими результатами этого изобретения являются:
- дальнейшее совершенствование информационных моделей, способов их осуществления, структур и технологий, отражающих процессы выполнения заявок потребителя на информацию ДЗЗ с учетом разнотипных космических средств;
- повышение оперативности и сокращение времени выполнения заявок потребителей на информацию ДЗЗ на основе реализованных моделей;
- совершенствование реализации единого подхода в проектировании и создании наземных средств разнотипных космических систем ДЗЗ, обеспечивающих планирование, прием, обработку и распространение информации ДЗЗ.
Комплекс, предложенный патентом [2], и способ по патенту [3] предусматривают составление суточных программ управления применением КА ДЗЗ и не допускают возможности коррекции программы применения в случае выявления на суточном интервале полета нарушений в работе бортовых, наземных средств или изменении метеорологической обстановки. Кроме того, предложенные технические решения не адаптированы для управления многоспутниковой орбитальной группировкой КА ДЗЗ. Указанные недостатки негативно сказываются на результатах выполнения заявок потребителей.
Из уровня техники известен способ обеспечения управления полетами космических аппаратов [4 - патент 2438941, МПК B64G 3/00. Способ обеспечения управления полетами космических аппаратов. Соколов Н.Л., Козлов В.Г., Соколов В.И., Литвиненко А.О., опубл. 10.01.2012], техническим результатом которого является реализация способа управления полетами разнотипных КА, позволяющего упростить структуру применяемого информационно-вычислительного комплекса (ИВК) и снизить стоимость его развертывания. Технический результат достигается за счет унификации ИВК путем выделения из состава секторов управления, предназначенных для управления КА различных типов, общей части аппаратно-программных средств и методико-алгоритмического обеспечения, пригодных к использованию без ограничений при управлении полетами КА различного типа. Способу по патенту [4] свойственен ряд недостатков.
1. Так как способ обеспечивает снижение стоимости создания необходимого ИВК и упрощение структуры ИВК, способ не позволяет повысить функциональную эффективность орбитальной группировки КА ДЗЗ при применении ее по целевому назначению.
2. Поскольку способ обеспечивает снижение только стоимости создания необходимого ИВК, то он не направлен на снижение стоимости за весь период жизненного цикла центра управления полетами, включающего необходимый унифицированный ИВК. Из описания способа следует, что для управления разнотипными КА предусматривается организация дополнительных рабочих мест и выделение отдельного помещения для размещения специалистов групп анализа и реализации. Очевидно, что дополнительные места и помещение требуют дополнительного расхода ресурсов, и увеличивают стоимость центра управления полетами в целом, включающую, во-первых, стоимость его создания, во-вторых, стоимость его эксплуатации за весь период жизненного цикла.
3. Способ не может быть реализован в случае, если сектора управления КА различных типов не имеют общих частей аппаратно-программных средств и методико-алгоритмического обеспечения. Например, в случае, если сектора управления созданы разными организациями независимо друг от друга, предложенный способ оказывается нереализуем и не позволяет достичь соответствующего технического результата.
4. Способ затруднительно реализовать в случае, если часть секторов управления многочисленной орбитальной группировки, разработанных для управления различными типами КА, расположены в разных городах, и размещение элементов локальной вычислительной сети, предусмотренных способом, для территориально удаленных секторов управления является сложной технической задачей.
5. Способ не содержит описания того, каким образом может быть решена задача введения в эксплуатацию новых орбитальных группировок с КА нового типа. Процесс модернизации унифицированного ИВК при подключении к управлению новых секторов управления новыми типами КА не изложен. Трудоемкость такого процесса модернизации не рассмотрена.
Известен [5 - патент 2506207, МПК B64G 3/00. Способ обеспечения управления полетами космических аппаратов. Иванов В.М., Соколов Н.Л., Козлов В.Г., Захаров П.А., опубл. 10.02.2014], являющийся развитием упомянутого выше способа по патенту [4], и направленный на достижение следующего технического результата: обеспечение управления полетами космических аппаратов в условиях засоренности околоземного космического пространства техногенным мусором. Для этого способа характерны все недостатки, свойственные и способу по патенту [4].
Из уровня техники известен способ [6 - патент 2522774, МПК B64G 3/00. Способ обеспечения управления полетами космических аппаратов. Иванов В.М., Соколов Н.Л., Козлов В.Г., Зеленов Д.А., Захаров П.А., опубл. 20.07.2014], являющийся дальнейшей модернизацией способа по патенту [4], и направленный на достижение следующего технического результата: обеспечение непрерывного управления полетами космических аппаратов различного типа.
Для достижения этого технического результата способ по патенту [6] предусматривает, во-первых, использование в центре управления полетом структурно выделенного сегмента ИВК, предложенного способом по патенту [4], и единого для всех секторов управления, предназначенных для управления КА различного типа, во-вторых, интеграцию ИВК центра управления ретрансляцией и связью коммуникационными средствами в структурно выделенный сегмент, и организацию связи такой структуры с комплексом внешних информационных обменов. Из формулы изобретения способа следует, что способ позволяет осуществлять:
- прием и обработку заявок потребителей на предоставление услуг ретрансляции и связи по всем видам информации;
- обмен по локальной вычислительной сети всеми видами полетной информации по управляемым космическим аппаратам, а также с внешними абонентами через комплекс внешних информационных обменов;
- прогноз движения КА относительно спутников-ретрансляторов и выбор маршрутов ретрансляции информации;
- доведение до потребителей сообщений о предоставлении услуг ретрансляции и связи;
- формирование программы управления полетами космических аппаратов, находящихся как в зонах, так и вне зон прямой радиовидимости с наземными средствами управления, и выдачу программ управления на космические аппараты.
Способ предусматривает управление каналами внешних информационных обменов совместно с решением задач управления полетами КА орбитальной группировкой. Согласно изобретению, такое техническое решение обеспечивает непрерывность управления.
Недостатком изобретения является отсутствие доказательств, подтверждающих, что предложенное техническое решение способствует достижению непрерывности управления. Известно, что именно периодическое отсутствие отечественных КА в зонах радиовидимости наземных пунктов управления является существенной причиной, не позволяющей обеспечить непрерывность управления. Не ясно, каким образом преобразования аппаратных и программных средств ИВК позволяют обеспечить непрерывность управления низкоорбитальными, среднеорбитальными и высокоэллиптическими КА. Снижение длительности интервалов времени, в течение которых КА находится вне зоны радиовидимости пунктов управления, может достигаться за счет применения КА-ретрансляторов, однако такие действия в способе по патенту [6] не рассматриваются.
Для этого способа характерны все указанные выше недостатки, свойственные способу по патенту [4]. Кроме того, для обеспечения непрерывности управления формула изобретения способа по патенту [6] содержит предложение по обработке только заявок потребителей по предоставлению услуг ретрансляции и связи. Способ по патенту [6] предусматривает составление только долгосрочных и суточных планов полета и не предусматривает возможности оперативного перераспределения задач между КА ДЗЗ орбитальной группировки в случае нарушения функционирования используемых технических средств либо оперативного появления новых важных задач, возлагаемых на КА.
Существенным недостатком рассмотренных выше способов [патенты № 2438941, № 2506207, № 2522774] является отсутствие технических решений, направленных на обеспечение эффективного управления группировкой КА ДЗЗ, состоящей из большого количества КА ДЗЗ различного типа. Под эффективностью рассматривается именно функциональная эффективность, иначе говоря, результативность целевого применения, например, объем и качество результатов космической съемки, полученных группировкой КА ДЗЗ на некотором, например, суточном интервале времени.
Способ по патенту [6] принят в качестве способа-прототипа заявленного изобретения.
Перспективные многоспутниковые орбитальные группировки (ОГ) ДЗЗ имеют важное и существенное достоинство по сравнению с ОГ, включающими небольшое количество КА ДЗЗ. Существует возможность коррекции плана применения при обнаружении нарушений в работе КА, препятствующих выполнению некоторой заявки на проведение космической съемки. Задача выполнения такой заявки может быть возложена на другой КА, находящийся в орбитальной структуре вблизи неисправного КА. Для ОГ низкоорбитальных КА, построенной из условия глобального непрерывного покрытия земной поверхности зонами обзора, изменение во времени выполнения заявки в случае такой коррекции плана невелико.
Поэтому для обеспечения эффективного планирования и применения именно многоспутникой ОГ КА ДЗЗ, создания алгоритмов автоматического планирования перспективной многочисленной ОГ, управления функционированием средств внешних информационных обменов требуется дальнейшее развитие методов и средств отображения процессов управления целевым применением, способных адекватно отражать функционирование многочисленной ОГ и способствовать возможности оперативно реагировать на явления, препятствующие выполнению заявок потребителей.
К современным космическим системам ДЗЗ предъявляют требования гибкости управления и обеспечения эффективного целевого применения. Под гибкостью системы понимается способность подсистемы управления быстро реагировать на происходящие изменения в работе самой технической системы или внешних воздействиях. В особенности остро необходимость обеспечения гибкого и эффективного решения целевых задач связана с развертыванием многоспутниковых группировок, состоящих из КА ДЗЗ различного типа. Известно, что результат применения всей группировки КА ДЗЗ за некоторый период времени может быть оценен целевой функцией (ЦФ), объединяющей, например, показатели, отражающие полученную площадь районов съемки, длительность интервала времени от проведения съемки до доставки информации, разрешение на местности полученных снимков. Формула расчета подобной целевой функции приведена в работе [7 - И.О. Скобелев, В.К. Скирмунт, Е.В. Симонова, А.А. Жиляев, B.C. Травкин. Планирование целевого применения группировки космических аппаратов дистанционного зондирования Земли с использованием мультиагентных технологий. Известия ЮФУ. Технические науки. 2015, №10(171)].
С учетом результатов работы [7] в качестве таких целевых функций (ЦФ), характеризующих применение одного КА с номером j - ЦФj, и применение всей группировки КА ДЗ3-ЦФ, можно применить функции, вычисляемые по формулам:


где  - значение целевой функции, соответствующее результату выполнения задания по получению снимка района с номером i с помощью космического аппарата с номером j;
- значение целевой функции, соответствующее результату выполнения задания по получению снимка района с номером i с помощью космического аппарата с номером j;
m - количество районов наблюдения;
bi - коэффициент значимости района;
tmax - максимально допустимая длительность интервала от проведения съемки района до поступления в обработку;
ti - длительность интервала от проведения съемки района с номером i до поступления в обработку;
rmax - предельно допустимое разрешение снимка;
ri - разрешение снимка района с номером i;
а1, а2 - коэффициенты значимости результатов по длительности доставки и разрешению снимка.
С учетом рассмотренных обозначений, задача повышения эффективности целевого применения орбитальной группировки КА ДЗЗ в формализованном виде может быть представлена как задача получения максимального значения целевой функции в виде:

где N - количество КА ДЗЗ в орбитальной группировке;
cj - коэффициент важности КА.
Очевидно, что возможность гибкого управления целевым применением орбитальной группировки, состоящей из большого количества КА ДЗЗ, способствует увеличению целевой функции, иначе говоря, результативности орбитальной системы, характеризующей эффективность ее эксплуатации за некоторый период времени.
Приоритетной технической проблемой, на решение которой направлено заявленное изобретение, является осуществление такого способа управления орбитальной группировкой КА ДЗЗ, при котором обеспечивают высокую результативность целевого применения всей совокупности эксплуатируемых КА ДЗЗ в целом.
Результативность применения на некотором интервале времени может характеризоваться, например, одним или совокупностью таких показателей, как объем полученной целевой информации, площадь районов съемки, длительность интервала времени от проведения съемки до поступления информации в центры обработки результатов, разрешение на местности полученных снимков.
Технический результат, состоящий в эффективном применении ОГ эксплуатируемых КА ДЗЗ, состоящей, возможно, из КА различного типа, в соответствии с изобретением достигается,
во-первых, путем создания цифрового двойника (ЦД) средств и подсистем, используемых для получения космических снимков; такой ЦД включает цифровые двойники четырех подсистем:
- ЦД орбитальной группировки КА ДЗЗ,
- ЦД наземных средств управления (НСУ),
- ЦД пунктов приема информации (ППИ),
- ЦД средств внешних информационных обменов;
во-вторых, последовательностью действий по планированию целевого применения каждого КА орбитальной группировки, направленной на обеспечение максимального значения целевой функции орбитальной системы, при которой используются данные цифровых двойников, а также методы планирования и распределения задач между КА, наземными пунктами управления и приема информации, характеризующиеся высоким уровнем автоматизации;
в-третьих, гибким управлением целевым применением орбитальной группировки КА ДЗЗ, предусматривающим перепланирование программ работы бортовых и наземных средств управления, пунктов приема информации на основе данных, содержащихся в цифровых двойниках, в случаях выявления нарушений в работе средств или появлении новых заявок на проведение космической съемки.
Средства внешних информационных обменов являются совокупностью технических средств, применяемых для обмена информацией между КА ДЗЗ, НСУ, ППИ, центрами управления полетом, специализированных по типам КА ДЗЗ. В совокупность средств внешних информационных обменов могут быть включены КА-ретрансляторы.
В соответствии с [8 - ГОСТ Р 57700.37-2021. Компьютерные модели и моделирование. Цифровые двойники изделий] цифровой двойник изделия - система, состоящая из цифровой модели изделия и двусторонних информационных связей с изделием и (или) его составными частями. Под наземным средством управления в описании изобретения следует понимать радиотехнические системы, обеспечивающие информационное взаимодействие между наземным и бортовым комплексами управления. Такое информационное взаимодействие допускает возможность использования КА-ретрансляторов, обеспечивающих обмен данными между наземными средствами управления и бортовой аппаратурой.
В заявленном способе цифровые двойники по существу содержат сведения о ресурсах системы дистанционного зондирования Земли, доступных для планирования процессов получения и передачи информации. Решения по управлению применением группировки КА ДЗЗ принимают по результатам обработки данных, содержащихся в цифровых двойниках. В цифровых двойниках с помощью информационно-телеметрических систем поддерживают сведения о состоянии бортовой аппаратуры и возможности применения КА орбитальной группировки по целевому назначению, работоспособности наземных средств управления, пунктов приема информации и средств внешних информационных обменов.
Планирование целевого применения системы КА ДЗЗ предусматривает составление планов съемки специализированной бортовой аппаратурой, а также планов передачи программ управления на КА, работы ППИ и средств внешних информационных обменов.
Предложенным способом предусмотрено:
- планирование осуществляют на основании данных цифровых двойников таким образом, чтобы максимизировать целевую функцию системы, отражающую результат применения орбитальной группировки КА ДЗЗ;
- анализ работоспособности и технических параметров средств и подсистем, используемых для получения космических снимков, проводят постоянно путем обработки данных цифровых двойников.
При обнаружении нарушений функционирования орбитальных или наземных средств, выявляемых по результатам анализа данных ЦД, проводят коррекцию планов функционирования бортовых и наземных средств. Таким образом, согласно заявленному способу, осуществляют гибкое управление целевым применением орбитальной группировки КА ДЗЗ. Очевидно, что задача обеспечения непрерывности управления орбитальной группировкой диктует необходимость непрерывного обновления данных, содержащихся в цифровых двойниках.
При разработке новых типов КА создают космический комплекс, являющийся совокупностью функционально взаимосвязанных орбитальных и наземных технических средств, обеспечивающих как самостоятельное решение целевых задач на основе использования космического пространства, так и в составе космической системы. Центр управления полетами (ЦУП) КА является составной частью наземных технических средств космического комплекса. Он содержит технические системы и технологические средства командно-программного, телеметрического и баллистико-навигационного обеспечения и внешних информационных обменов, необходимые для управления полетами космических аппаратов [9 - ГОСТ 53802-2010. Системы и комплексы космические. Термины и определения].
В отличие от способа-прототипа, предусматривающего выделение из центров (секторов) управления КА, специализированных по типам КА, общей части аппаратно-программных средств и методико-алгоритмического обеспечения, пригодных к использованию без ограничений при управлении полетами КА различного типа, предложенный способ не предусматривает таких изменений структуры и порядка работы центров (секторов) управления.
Для достижения заявленного технического результата предложенного способа из каждого ЦУП, специализированного по типу КА, в ЦД орбитальной группировки КА ДЗЗ должны поступать значения параметров, характеризующих состояние бортовой аппаратуры КА, используемой для решения целевых задач, и сведения о возможности применения каждого КА орбитальной группировки по целевому назначению. Задача передачи в ЦД значений параметров и сведений, поступающих в ЦУП от телеметрических систем КА, является несложной технической задачей для современных систем информационного обеспечения. Кроме того, для осуществления предложенного способа необходимо обеспечить с помощью информационно-телеметрических систем поступление в цифровой двойник сведений и значений параметров, характеризующих работоспособность наземных средств управления, пунктов приема информации, сети информационного обмена, доступности и работоспособности КА-ретрансляторов.
Сущность предложенного способа управления целевым применением космических аппаратов дистанционного зондирования Земли состоит в выполнении центрами управления полетом, специализированными по типам КА, задач командно-программного, телеметрического и баллистического и навигационного обеспечения, обмена информацией, формировании программ работы бортовой аппаратуры КА, включающих подпрограммы работы обеспечивающих бортовых систем и подпрограмм работы целевой аппаратуры, передаче программ работы на борт КА наземными средствами управления, прием пунктами приема информации результатов работы КА, доставку результатов в центры обработки результатов.
Согласно предложенному способу, для управления целевым применением КА создают цифровые двойники орбитальной группировки КА ДЗЗ, наземных средств управления, пунктов приема информации, средств внешних информационных обменов. В цифровых двойниках по данным телеметрических систем постоянно собирают и обновляют сведения о состоянии и параметрах эксплуатируемых технических систем. На основании данных цифровых двойников и заявок на проведение космической съемки осуществляют планирование целевого применения КА, работы наземных средств управления и пунктов приема информации. При планировании обеспечивают максимальное значение целевой функции, отражающей результат применения орбитальной группировки КА в целом. Формируют по итогам планирования программы работы аппаратуры космических аппаратов и программы работы наземных средств управления, пунктов приема информации, средств внешних информационных обменов, передают программы работы в соответствующие центры управления полетом, наземные средства управления, пункты приема информации. Закладывают программы работы бортовой аппаратуры при проведении сеансов связи с космическими аппаратами. На пунктах приема информации получают от космических аппаратов результаты целевого применения после выполнения программ работы и направляют их в центр обработки результатов применения космических аппаратов дистанционного зондирования Земли. Оценивают соответствие разработанных программ целевого применения результатам космической съемки. Осуществляют мониторинг состояния, технических параметров применяемых бортовых и наземных средств управления, их работоспособности по данным цифровых двойников. Осуществляют коррекцию программ работы бортовых и наземных средств управления, пунктов приема информации по данным цифровых двойников при обнаружении несоответствия программ целевого применения результатам космической съемки, выявлении нарушений работы орбитальных, наземных средств управления, пунктов приема информации или поступлении новых заявок на проведение космической съемки, передают откорректированные программы работы в соответствующие центры управления полетом, наземные средства управления, пункты приема информации.
Результатом применения КА ДЗЗ (иначе целевого применения) являются результаты космической съемки. В дальнейшем описании термин «наземные средства» используется для обозначения совокупности наземных средств управления и пунктов приема информации.
К существенным признакам, характеризующим изобретение и обеспечивающим получение технического результата, относится введение нового элемента в систему управления целевым применением КА ДЗЗ, а именно цифрового двойника средств и подсистем, используемых для получения космических снимков, имеющем в составе цифровые двойники орбитальной группировки КА ДЗЗ, наземных средств управления, пунктов приема информации, средств внешних информационных обменов.
При осуществлении изобретения выполняется следующая совокупность последовательных действий.
1. Сбор, хранение и постоянное обновление в цифровых двойниках по данным телеметрических систем сведений о состоянии и параметрах эксплуатируемых технических систем, необходимых для планирования и целевого применения группировки КА ДЗЗ.
2. Планирование целевого применения всех КА орбитальной группировки, работы наземных средств управления и пунктов приема информации для выполнения заявок на проведение космической съемки выполняют таким образом, чтобы обеспечить максимальное значение целевой функции, отражающей результат применения орбитальной группировки КА на заданном интервале эксплуатации и объединяющей, например, показатели, характеризующие полученную площадь районов съемки, длительность интервала времени от проведения съемки до доставки информации, разрешение на местности полученных снимков. Поскольку планирование осуществляют для всех КА одновременно, целевую функцию можно называть единой целевой функцией всей орбитальной системы.
3. Формирование программ работы аппаратуры КА, работы наземных средств управления, пунктов приема информации, средств внешних информационных обменов по итогам планирования, выполненного на основе единой целевой функции.
4. Передача (рассылка) программ работы КА ДЗЗ в центры управления полетом, программ работы наземных средств управления и пунктов приема информации на соответствующие средства и пункты. Для передачи программ работы используют средства внешних информационных обменов.
5. Закладка программы работы бортовой аппаратуры при проведении сеансов связи с космическими аппаратами.
6. Получение от КА результатов целевого применения на пунктах приема информации после выполнения КА программы работы и направление результатов космической съемки в центры обработки результатов применения КА ДЗЗ.
7. Оценка соответствие разработанных программ целевого применения результатам космической съемки.
8. Мониторинг состояния, технических параметров применяемых бортовых средств, наземных средств управления, пунктов приема информации их работоспособности по данным цифровых двойников.
9. Коррекция программ работы бортовых и наземных средств управления, пунктов приема информации по данным цифровых двойников при обнаружении несоответствия программ целевого применения результатам космической съемки, выявлении нарушений функционирования орбитальных, наземных средств управления, пунктов приема информации или поступлении новых заявок на проведение космической съемки.
10. Передача откорректированных программы работы КА ДЗЗ в центры управления полетом, программ работы наземных средств управления и пунктов приема информации на соответствующие средства и пункты. Для передачи программ используют средства внешних информационных обменов.
К достоинствам заявленного способа, помимо достижения указанного технического результата, следует отнести следующие возможности.
1. Возможность полностью автоматизировать процесс планирования целевого применения на основе параметров орбитальных систем и наземных средств, собираемых и обновляемых в цифровых двойниках. Алгоритм планирования может быть разработан с использованием мультиагентных технологий, которые позволяют обеспечить:
- максимальное значение принятой целевой функции, характеризующей планируемый результат применения орбитальной системы;
- при планировании предусматривать проведение космической съемки некоторого определенного района земной поверхности каким-либо строго заданным КА; так при использовании целевых функций вида (1), (3) строгая жесткая привязка районов съемки и КА достигается за счет подбора коэффициентов bi, cj в формулах (1), (3).
2. Заявленный способ не требует существенного изменения порядка работы центров управления полетом и других наземных средств, традиционно привлекаемых к управлению полетами КА ДЗЗ. Требуется только передача телеметрической информации (или части информации), поступающей в ЦУП от КА, к цифровым двойникам, а также обеспечение функционирования каналов доставки таких сведений.
3. Относительно несложная процедура изменения процесса планирования целевого применения при наращивании (уменьшении) состава орбитальной группировки или наземных средств. Применение цифровых двойников сводит процедуру такого изменения, в основном, к добавлению (изъятию) соответствующих сведений в математических моделях орбитальных и наземных средств.
Заявленный способ может быть использован для управления целевым применением космических аппаратов дистанционного зондирования Земли и многократно воспроизведен с помощью системы средств, включающих: орбитальные средства дистанционного зондирования Земли; наземные средства управления, предназначенные, в частности, для обмена командно-программной и телеметрической информацией; пунктов приема информации, средств внешних информационных обменов.
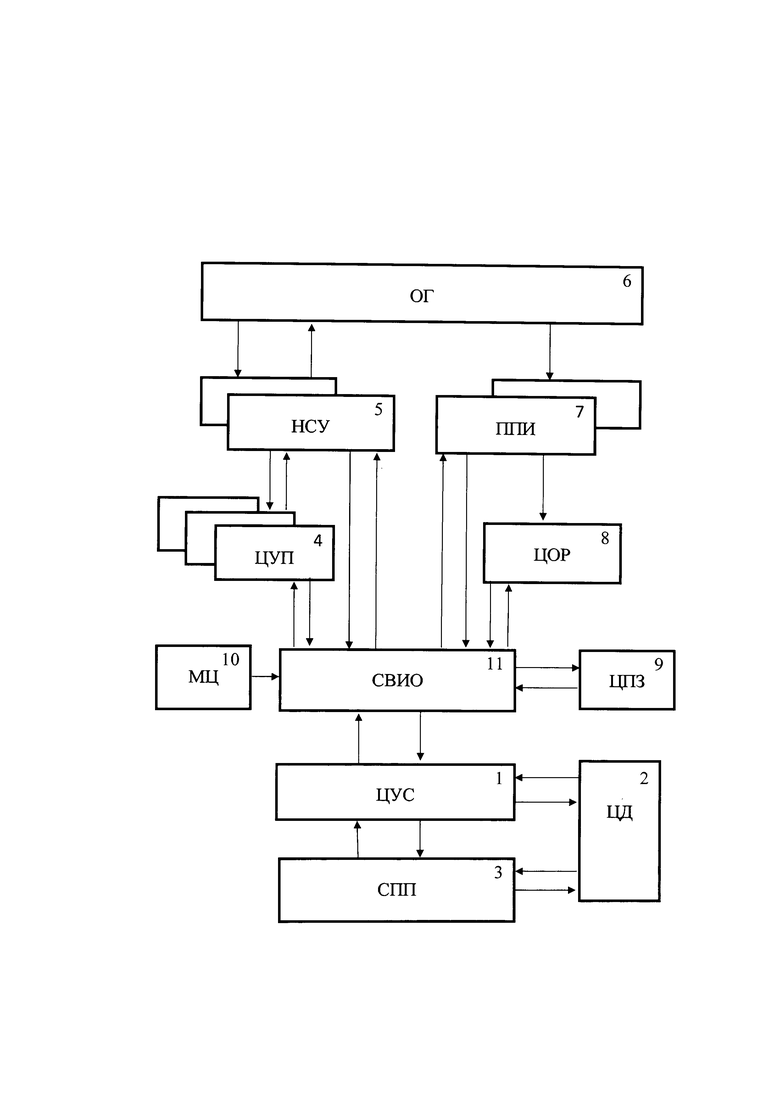
Блок-схема системы, предназначенной для осуществления предложенного способа, показана на схеме в графической части.
Система (схема в графической части) содержит: центр управления системой (ЦУС) 1; цифровой двойник (ЦД) 2; систему планирования применения КА (СПП) 3; центры управления полетом, специализированные по типам КА (ЦУП) 4; наземные средства управления (НСУ) 5; орбитальную группировку КА ДЗЗ (ОГ) 6; пункты приема информации (ППИ) 7; центр обработки результатов применения КА ДЗЗ (ЦОР) 8 (далее - центр обработки результатов); центр приема заявок и предоставления результатов космической съемки (ЦПЗ) 9 (далее центр приема заявок), метеорологический центр (МЦ) 10, средства внешних информационных обменов (СВИО) 11.
Первый вход ЦУС 1 соединен с первым выходом СВИО 11, второй вход ЦУС 1 соединен с первым выходом ЦД 2, третий вход ЦУС 1 соединен с первым выходом СПП 3. Первый выход ЦУС 1 соединен с первым входом СВИО 11, второй выход ЦУС 1 соединен с первым входом ЦД 2, третий выход ЦУС 1 соединен с первым входом СПП 3.
Второй вход ЦД 2 соединен со вторым выходом СПП 3, второй выход ЦД 2 соединен со вторым входом СПП 3.
Второй вход СВИО 11 соединен с выходом МЦ 10.
Третий вход СВИО 11 соединен с первым выходом ЦУП 4, четвертый вход СВИО 11 соединен с первым выходом НСУ 5, пятый вход СВИО 11 соединен с первым выходом ППИ 7, шестой вход СВИО 11 соединен с выходом ЦОР 8, седьмой вход СВИО 11 соединен с выходом ЦП3 9.
Второй выход СВИО 11 соединен с первым входом ЦУП 4, третий выход СВИО 11 соединен с первым входом НСУ 5, четвертый выход СВИО 11 соединен с первым входом ППИ 7, пятый выход СВИО 11 соединен с первым входом ЦОР 8, шестой выход СВИО 11 соединен со входом ЦПЗ 9.
Второй выход ЦУП 4 соединен со вторым входом НСУ 5, второй вход ЦУП 4 соединен со вторым выходом НСУ 5.
Третий вход НСУ 5 соединен с первым выходом ОГ 6. Третий выход НСУ 5 соединен со входом ОГ 6.
Второй выход ОГ 6 соединен со вторым входом ППИ 7.
Второй выход ППИ 7 соединен со вторым входом ЦОР 8.
Описанная система работает следующим образом.
ЦПЗ 9 принимает заявки на проведения космической съемки, которые поступают от ЦПЗ 9 сначала в СВИО 11, а затем - в ЦУС 1. ЦУС 1 передает заявки в ЦД 2 и СПП 3. Данные от МЦ 10, поступают в СВИО 11, затем - в ЦУС 1, затем - в ЦД 2. Параметры, характеризующие техническое состояние НСУ 5, ППИ 7 поступают в СВИО 11, затем - в ЦУС 1,затем - вЦЦ2.
Из ЦД 2 в СПП 3 поступают данные о составе, техническом состоянии и параметрах движения орбитальной группировки, техническом состоянии НСУ 5 и ППИ 7, данные МЦ 10, на основании которых СПП 3 осуществляет планирование работы бортовых и наземных средств для выполнения заявки на космическую съемку из условия максимизации выбранной целевой функции. В результате планирования СПП 3 формирует программы работы целевой аппаратуры КА, программы работы НСУ 5 и ППИ 7.
СПП 3 передает программы работы целевой аппаратуры КА, НСУ 5, ППИ 7 в ЦД 2 и ЦУС 1.
Программы работы целевой аппаратуры КА из ЦУС 1 поступают в СВИО 11, затем - в ЦУП 4. Программы работы НСУ 5 из ЦУС 1 поступают в СВИО 11, затем - в соответствующие НСУ 5. Программы работы ППИ 7 из ЦУС 1 поступают в СВИО 11, затем - в соответствующие ППИ 7.
В ЦУП 4 после получения программ работы целевой аппаратуры КА формируют программы работы бортовой аппаратуры КА. Программы работы бортовой аппаратуры каждого КА, формируемые в ЦУП 4, включают подпрограмму работы целевой аппаратуры КА и подпрограмму работы обеспечивающих систем КА.
Программы работы бортовой аппаратуры КА поступают на НСУ 5 из ЦУП 4. Затем программы работы бортовой аппаратуры из НУ С 5 поступают в бортовую аппаратуру КА при проведении сеансов управления. В ходе сеансов управления в НСУ 5 поступает телеметрическая информация о состоянии бортовых систем КА ОГ 6, которая поступает в СВИО 11, затем в ЦУС 1, затем - в ЦД 2.
Космические аппараты, находящиеся в составе ОГ 6, выполняют космическую съемку в соответствии с программами работы и передают результаты космической съемки, а также телеметрическую информацию о состоянии бортовых систем и параметры орбитального движения на ППИ 7. Затем эти результаты, информация и параметры поступают в ЦОР 8. Телеметрическая информация о состоянии бортовых систем, параметры орбитального движения из ЦОР 8 поступают в СВИО 11, затем - в ЦУС 1, затем в ЦД 2.
ЦОР 8 обрабатывает результаты космической съемки, использует при этом характеристики бортовой аппаратуры, параметры движения КА, данные заявок на проведение съемки, которые поступают из ЦД 2 сначала в ЦУС 1, а затем с помощью СВИО 11 в ЦОР 8.
После обработки результаты съемки из ЦОР 8 через СВИО 11 поступают, во-первых, в ЦПЗ 9, во-вторых, в ЦУС 1, а затем - в ЦД 2.
В ЦУС 1 с помощью СВИО 11 постоянно поступают параметры, характеризующие техническое состояние НСУ 5 и ППИ 7, а затем эти параметры поступают в ЦД 2. ЦД 2 хранит сведения о состоянии орбитальных и наземных средств управления, характеризующих их технические параметры, в том числе и ограничениях на работу средств. Телеметрическая информация от бортовых систем ОГ 6, поступает, во-первых, при проведении сеансов управления на НСУ 5, затем - в СВИО 11, затем - в ЦУС 1, затем - в ЦД 2, во-вторых, при передаче результатов целевого применения сначала на ППИ 7, затем - в ЦОР 8, затем - в СВИО 11, затем - в ЦУС 1, затем - в ЦД 2.
От НСУ 5 сведения о результатах проведения сеансов управления, состоянии бортовых систем, параметрах движения КА, нештатных ситуациях на время проведения сеанса управления поступают в ЦУП 4, затем - в СВИО 11, затем - в ЦУС 1, затем - в ЦД 2. Эти сведения обновляют в ЦД 2 данные о состоянии, характеристиках и параметрах движения орбитальных средств. Сведения о возникновении нештатных ситуаций на борту ОГ 6, препятствующих выполнению заявок, поступают в составе телеметрической информации с помощью СВИО 11 в ЦУС 1, затем - в ЦД 2.
В ЦУС 1 на основании данных ЦД 2 выполняют оценку соответствия полученных результатов космической съемки программе целевого применения ОГ 6. При выявлении несоответствия результатов космической съемки программе работы, поступлении новых заявок, или обнаружении нарушений в работе средств, препятствующих выполнению программ работы бортовых, наземных средств управления, пунктов приема информации осуществляют перепланирование (коррекцию) программ работы бортовой аппаратуры, НСУ 5, ППИ 7 с помощью СПП 3, используют при этом ЦД 2. Передают обновленные (откорректированные) программы работы бортовых и наземных средств управления, пунктов приема информации в соответствующие центры управления полетом, наземные средства управления, пункты приема информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ НАЗЕМНЫЙ КОМПЛЕКС ПРИЕМА, ОБРАБОТКИ И РАСПРОСТРАНЕНИЯ ИНФОРМАЦИИ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ (МНКПОР ДЗЗ) | 2014 |
|
RU2552109C1 |
| Космическая система спутниковой связи | 2017 |
|
RU2734228C2 |
| Многофункциональный наземный комплекс управления, приема и обработки информации | 2024 |
|
RU2828016C1 |
| Способ автоматизированного создания и использования базы электронных информационных данных дистанционного зондирования Земли и многофункциональный наземный комплекс для его осуществления | 2016 |
|
RU2646370C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| Система взаимодействия с потребителями данных дистанционного зондирования Земли | 2023 |
|
RU2822003C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ ПОЛЕТАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2010 |
|
RU2438941C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ В ПОЛЕТЕ И НАЗЕМНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2588178C1 |
| Спутниковая система, управляемая по межспутниковой радиолинии | 2018 |
|
RU2690966C1 |
| КОСМИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2020 |
|
RU2747240C1 |
Изобретение относится к области средств наблюдения и слежения за полетами космических аппаратов (КА) и к системам управления целевым применением многоспутниковой орбитальной группировки (ОГ) космических аппаратов дистанционного зондирования Земли (ДЗЗ), состоящих из КА одного или различных типов. Для управления целевым применением космических аппаратов дистанционного зондирования Земли создают цифровые двойники средств и подсистем, используемых для получения космических снимков. Планируют целевое применение на основе данных цифрового двойника, обеспечивающее максимальное значение целевой функции орбитальной системы. Осуществляют гибкое управление целевым применением орбитальной группировки КА ДЗЗ, предусматривающим перепланирование программ работы бортовых и наземных средств управления на основе данных, содержащихся в цифровых двойниках, в случаях выявления нарушений в работе средств или поступлении новых заявок на проведение космической съемки. Достигается эффективное применение ОГ эксплуатируемых КА ДЗЗ. 1 ил.
Способ управления целевым применением космических аппаратов дистанционного зондирования Земли, при котором центры управления полетом, специализированные по типам космических аппаратов, выполняют задачи командно-программного, телеметрического, и баллистического, и навигационного обеспечения, обмена информацией, формируют программы работы бортовой аппаратуры космических аппаратов, включающих подпрограммы работы обеспечивающих бортовых систем и подпрограммы работы целевой аппаратуры, передачу программ работы на борт космического аппарата наземными средствами управления, прием пунктами приема информации результатов работы космического аппарата, доставку результатов в центры обработки результатов, отличающийся тем, что создают цифровые двойники орбитальной группировки космических аппаратов дистанционного зондирования Земли, наземных средств управления, пунктов приема информации, средств внешних информационных обменов, в цифровых двойниках по данным телеметрических систем постоянно собирают и обновляют сведения о состоянии и параметрах эксплуатируемых технических систем, на основании данных цифровых двойников и заявок на проведение космической съемки осуществляют планирование целевого применения космических аппаратов, работы наземных средств управления, пунктов приема информации, при планировании обеспечивают максимальное значение целевой функции, отражающей результат применения орбитальной группировки космических аппаратов в целом, формируют по итогам планирования программы работы аппаратуры космических аппаратов и программы работы наземных средств управления, пунктов приема информации, средств внешних информационных обменов, передают программы работы в соответствующие центры управления полетом, наземные средства управления, пункты приема информации, закладывают программы работы бортовой аппаратуры при проведении сеансов связи с космическими аппаратами, на пунктах приема информации получают от космических аппаратов результаты целевого применения после выполнения программ работы и направляют их в центр обработки результатов применения космических аппаратов дистанционного зондирования Земли, оценивают соответствие разработанных программ целевого применения результатам космической съемки, осуществляют мониторинг состояния, технических параметров применяемых бортовых и наземных средств управления, их работоспособности по данным цифровых двойников, осуществляют коррекцию программ работы бортовых и наземных средств управления, пунктов приема информации по данным цифровых двойников при обнаружении несоответствия программ целевого применения результатам космической съемки, выявлении нарушений работы орбитальных, наземных средств управления, пунктов приема информации или поступлении новых заявок на проведение космической съемки, передают откорректированные программы работы в соответствующие центры управления полетом, наземные средства управления, пункты приема информации.
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ ПОЛЕТАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2522774C1 |
| Воздушный компрессор для турбины внутреннего горения | 1935 |
|
SU44742A1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| CN 110738426 A, 31.01.2020 | |||
| EP 3932810 A1, 05.01.2022. | |||

