Область техники
Заявленное изобретение относится к области космической техники, более конкретно, к космическим системам (КС) радиолокационного дистанционного зондирования Земли (ДЗЗ).
Уровень техники
В современных условиях развития цифровых информационных технологий на рынке ДЗЗ наиболее актуальными являются изменения в лучшую сторону следующих основных количественных показателей качества и производительности космических систем:
- значительное снижение себестоимости квадратного километра изображения космической съемки;
- снижение стоимости изготовления, запуска и эксплуатации космической системы ДЗЗ;
- снижение стоимости проектирования и изготовления космического аппарата;
- создание универсальной космической платформы для аппаратов, позволяющей на своей базе изготавливать аппараты с различной по разрешению оптико-электронной и радиолокационной полезной нагрузкой;
- снижение массогабаритных характеристик космического аппарата;
- возможность осуществления группового запуска космических аппаратов ДЗЗ;
- увеличение пространственного и линейного разрешения изображений продуктов космической съемки без существенного увеличения массы космического аппарата;
- увеличение периодичности съемки территории интереса путем увеличения маневренности космического аппарата (КА), а также путем быстрого и эффективного создания группировки космических аппаратов;
- увеличение скорости передачи целевой информации на наземные пункты приема путем использования узконаправленных бортовых антенн с электронным сканированием луча и с использованием схем динамической модуляции сигналов;
- использование в составе КА вторичной оптико-электронной полезной нагрузки для увеличения эффективности обработки результатов радиолокационной съемки;
- уменьшение стоимости эксплуатации наземных комплексов приема и управления путем создания сети универсальных совмещенных по радиочастотным диапазонам (прием в Х-диапазоне, прием/передача в S-диапазоне частот) контейнерных необслуживаемых станций, управляемых в автоматическом режиме из единого центра.
- использование современных цифровых технологий эффективного планирования применения целевой аппаратуры космических аппаратов КС ДЗЗ в целях оптимизации съемки с учетом приоритетов, оперативности, а также погодных условий и сезонности.
Различные известные решения предлагают решение какого-либо из перечисленных аспектов либо ряда аспектов. Детальное описание всех известных из уровня техники решений, подобных предложенному изобретению, в рамках данной заявки не представляется целесообразным.
В то же время следует указать решение, которое можно принять в качестве наиболее близкого аналога предложенного изобретения по назначению и ряду совпадающих признаков.
А именно, известен наземный специальный комплекс приема и обработки изображений, раскрытый в патентном документе RU 2460136 С2, 27.08.2012 [1], в состав которого дополнительно введен приемопередающий радиотракт S-диапазона, с помощью которого может осуществляться передача на борт космического аппарата управляющих команд.
Известное решение включает наземный комплекс приема и обработки изображений, совмещенный с комплексом управления.
Наземный комплекс управления в известном из [1] решении использует антенно-поворотный роботизированный комплекс, функционирующий в S-, и Х-диапазонах. Наземный комплекс приема и обработки изображений (и управления) построен на базе автоматизированных рабочих мест, высокоскоростной демодулятор позволяет осуществлять демодуляцию сигналов с произвольным видом модуляции.
Задачей, решаемой предложенным изобретением, является одновременное выполнение всех вышеперечисленных современных системных требований к космическим комплексам ДЗЗ путем реализации предложенных подходов к построению космических аппаратов и наземных комплексов приема, обработки и управления.
Технический результат - получение радиолокационных изображений с лучшим уровнем радиометрической чувствительности.
Другим техническим результатом - осуществление режима непосредственного сброса (одновременная съемка и сброс изображения на приемную станцию) со скоростями до 1,5 Гбит/с без каких-либо механических приводов наведения, только за счет электронного сканирования.
Еще одним техническим результатом - применение динамической модуляция, обеспечивающей увеличение объема сброса сырого потока при использовании малоапертурной антенны в составе Земной приемной станции.
Другие технические результаты достижение которых обеспечивает предложенное изобретение, будут указаны в следующих разделах описания как в явном виде, так и будут следовать для специалиста из описания конструкции и функционирования составных частей комплекса.
Раскрытие изобретения
В качестве объекта изобретения рассматривается космическая система дистанционного зондирования Земли, спроектированная и изготовленная с учетом комплексного применения целого ряда технических и конструктивных решений, позволяющих существенно улучшить основные показатели классических систем ДЗЗ.
Согласно изобретению, в его подробном варианте осуществления предложена космическая система дистанционного зондирования Земли, включающая:
-по меньшей мере, один космический аппарат (КА), который построен на силовой раме из алюминиевых и/или карбоновых ферменных конструкций, и выполненный с возможностью размещения под головным обтекателем ракета-носителя;
- наземный комплекс управления (НКУ);
- наземный комплекс приема и обработки изображений (НКПОИ);
и содержащая в составе полезной нагрузки:
- радиолокатор, с синтезированной апертурой, построенный с использованием активной фазированной антенной решетки (АФАР) С-диапазона частот;
- оптико-электронные камеры среднего разрешения видимого и инфракрасного диапазонов частот;
- приемник сигналов автоматической идентификации судов AIS;
- аппаратуру передачи целевой информации, выполненную на базе активной фазированной решетки с узконаправленным лучом в Х-диапазоне, обеспечивающую адаптивную высокоскоростную радиолинию Х-диапазона с регулированием скорости от 480 Мбит/с до 1,5 Гбит/с, причем индекс модуляции автоматически выбирается системой управления в зависимости от расчетной относительной дальности до приемной станции.
Радиолокационная полезная нагрузка, построенная с использованием планарной АФАР С-диапазона частот, позволяет получить радиолокационные изображения с лучшим уровнем радиометрической чувствительности.
Построение АФАР как цифровой антенной решетки позволяет повысить общую надежность системы, использовать цифровое формирование лучей на передачу и прием.
Данное решение позволяет обеспечить работоспособность системы при 2-3 рабочих устройств управления (включая одну из трех центральных) с незначительным снижением функциональности.
В качестве высокоскоростной радиолинии передачи целевой информации используется решение на базе активной фазированной решетки с узконаправленным лучом в Х-диапазоне частот.
Данное решение позволяет осуществлять режим непосредственного сброса (одновременная съемка и сброс изображения на приемную станцию) со скоростями до 1,5 Гбит/с без каких-либо механических приводов наведения, только за счет электронного сканирования,
Также в устройстве применяется динамическая модуляция, причем индекс модуляции автоматически выбирается системой управления в зависимости от расчетной относительной дальности до приемной станции, Объем сброса сырого потока увеличивается до 2-х раз при использовании малоапертурной антенны в составе Земной приемной станции.
В варианте развития изобретения станции НКУ и НКПОИ размещены в необслуживаемых контейнерах, работающих в автоматическом режиме и управляемых из единого центра обработки данных.
Изобретение обеспечивает решение множества комплексных аспектов. Поэтому для более ясного понимания сущности изобретения соответствующие результаты будут указаны далее при подробном описании изобретения при непосредственном описании его существенных признаков.
Осуществление изобретения
Для более полного раскрытия сущности предложенное изобретение иллюстрируется чертежами, согласно которым представлены:
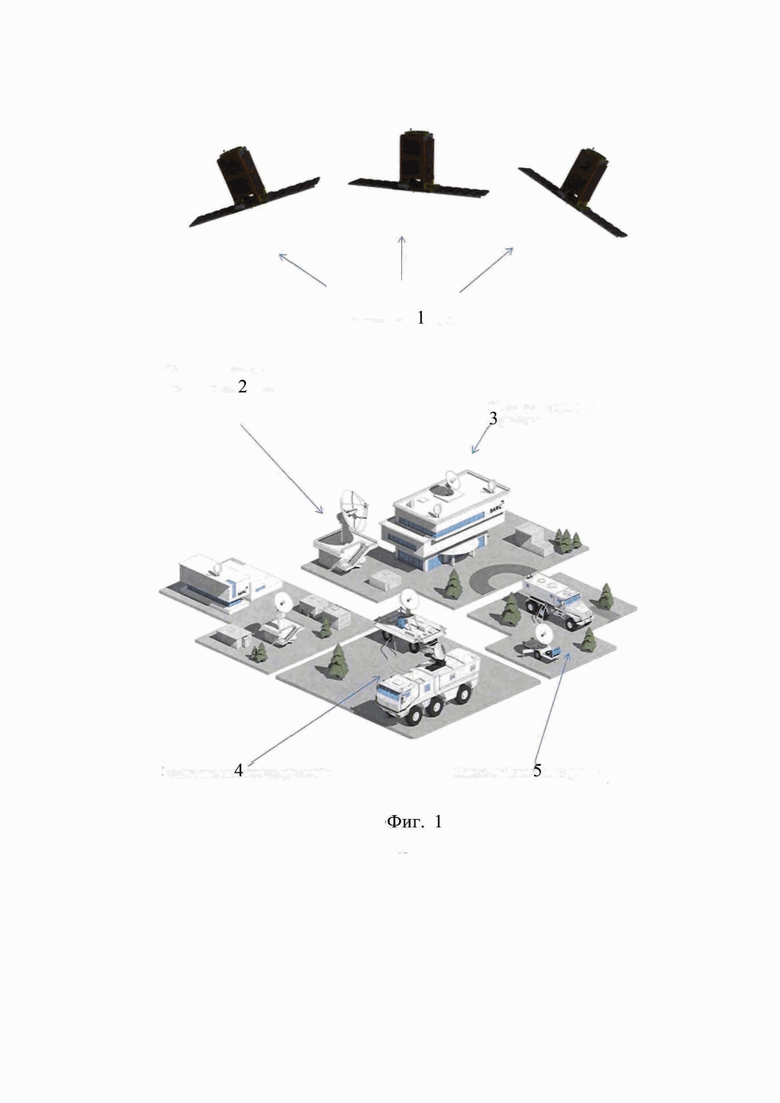
Фиг. 1 - состав КС ДЗЗ.
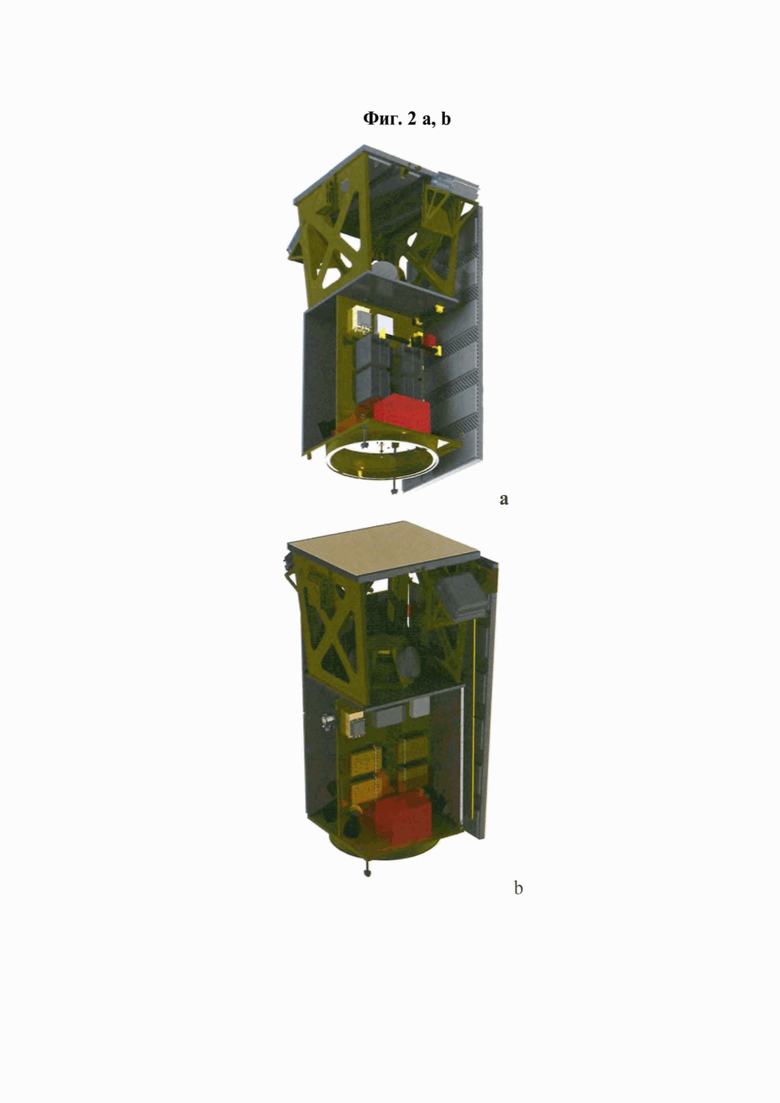
Фиг. 2 a, b - внешний вид конструкции КА.
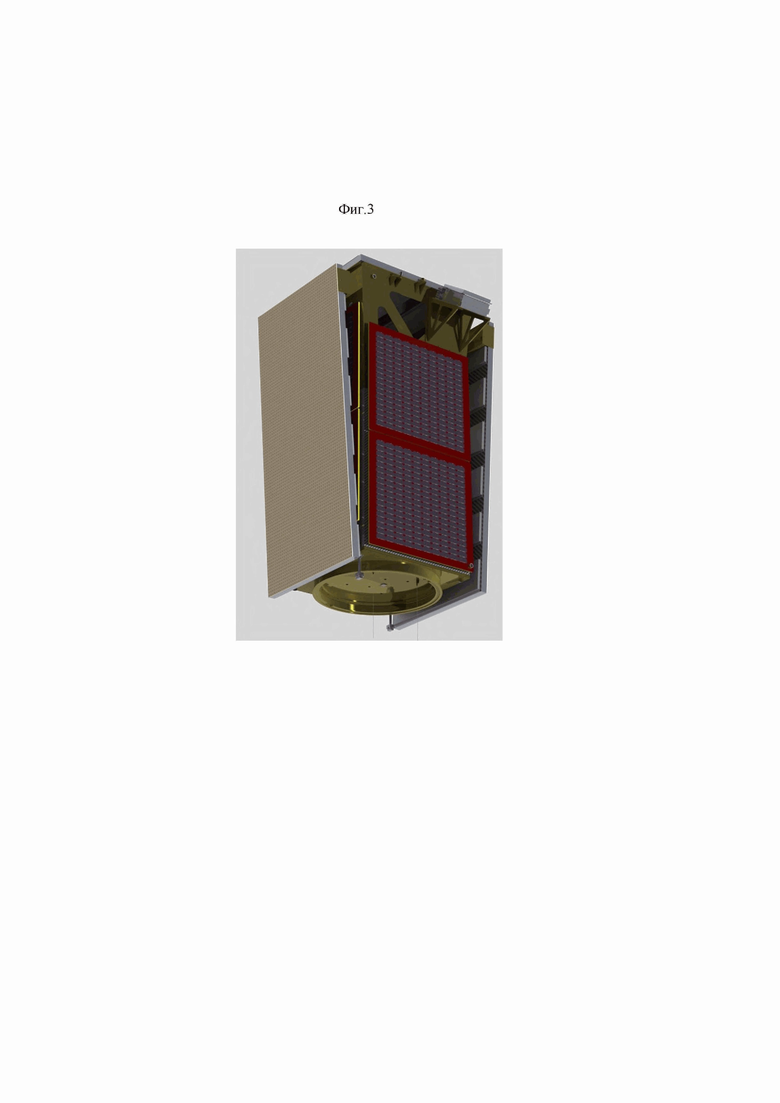
Фиг. 3 - вид КА в транспортной конфигурации.
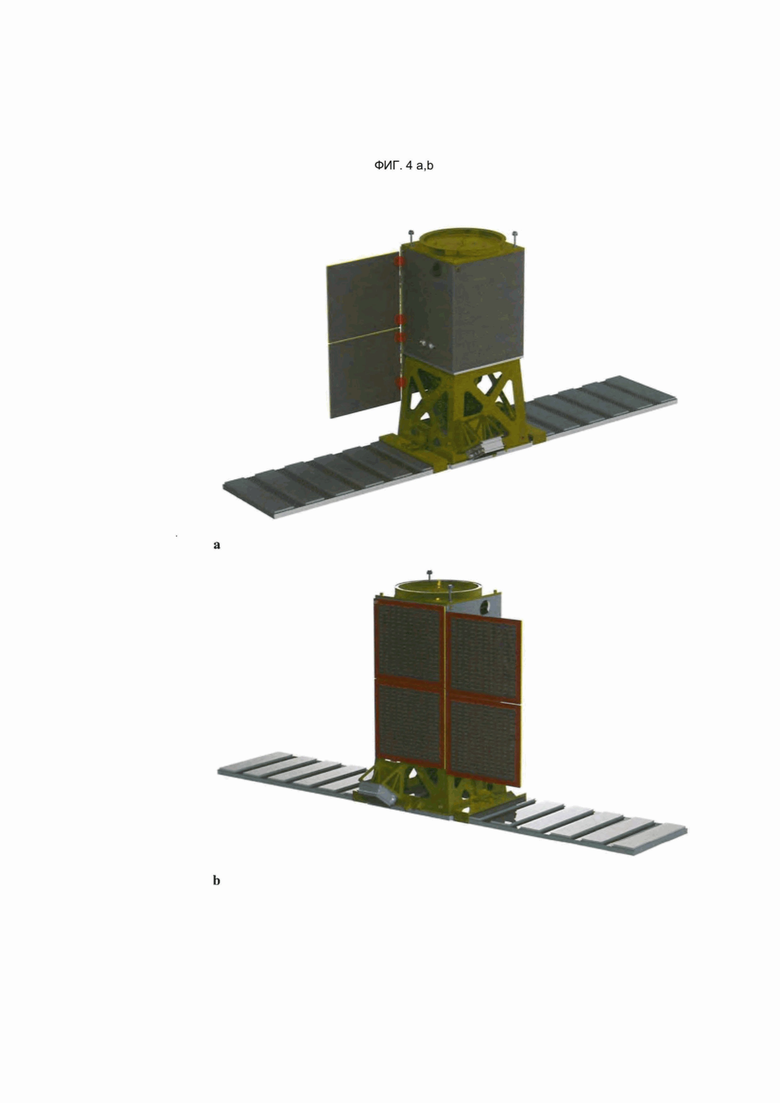
Фиг. 4 a, b - вид КА в летной конфигурации.
Фиг. 5-6 - габаритный чертеж КА в транспортной конфигурации.
Фиг. 7 - вид АФАР.
Фиг. 8 - подрешетка АФАР.
Фиг. 9 - антенная панель.
Фиг. 10 - высокоскоростная радиолиния на базе АФАР.
Фиг. 11 - размещение КА при их групповом запуске.
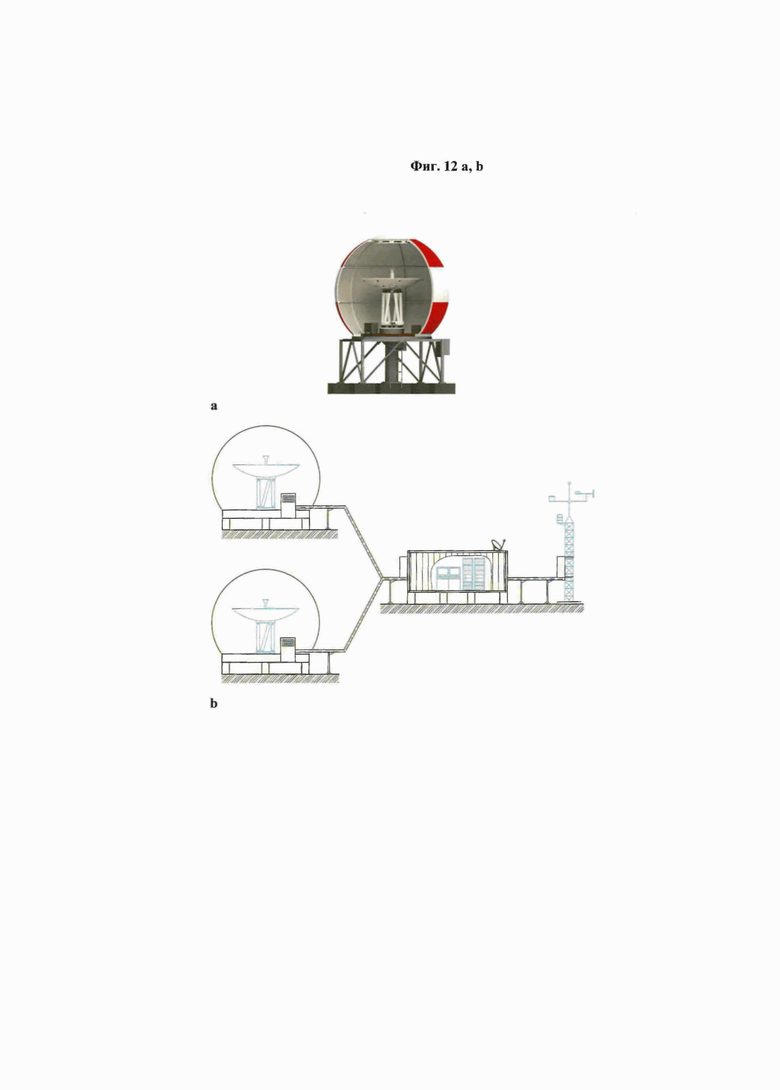
Фиг. 12 a, b - вид наземного комплекса управления или наземного комплекса приема и обработки изображений.
В основе осуществления изобретения находятся следующие положения.
Предпочтительно, в состав КС ДЗЗ входят, по меньшей мере, один космический аппарат, а также наземный комплекс управления, наземный комплекс приема и обработки изображений, которые могут быть совещены в рамках одного комплекса.
Кроме того, как показано на фиг. 1, в состав КС ДЗЗ могут входить более чем один космический аппарат (1), совмещенная стационарная антенна X и S-диапазонов (2), центр управления и обработки (3), мобильный комплекс управления (4), мобильный комплекс приема (5).
Совмещение средств в рамках одного комплекса или выполнение их мобильными осуществляется в зависимости условий и целей поставленных задач.
Космический аппарат построен на силовой раме из карбоновых и/или алюминиевых ферменных конструкций. Неизменность сочетаний размеров элементов конструкции позволяет обеспечить требуемую прочность. При этом одновременно при требуемой жесткости обеспечивается малая масса конструкции.
Космический аппарат построен с использованием раскрываемых панелей солнечных батарей и раскрываемой конструкцией радиолокационной полезной нагрузки.
Панели солнечных батарей и конструкция радиолокационной полезной нагрузки приводятся и фиксируются в рабочем положении для обеспечения жесткости конструкции и минимального времени успокоения после маневров при наведении.
В космическом аппарате используется радиолокационная полезная нагрузка, построенная с использованием планарной активной фазированной антенной решетки (АФАР) С-диапазона частот (5250-5570 МГц, длина волны 5.54 см). АФАР состоит из трех механических панелей, служащих для уменьшения габаритов космического аппарата в транспортной конфигурации (фиг. 7).
АФАР состоит из 15 одинаковых подрешеток, каждая из которых является самостоятельным радиоэлектронным устройством (фиг. 8). Три центральных подрешетки используются для управления остальными подрешетками, сбором данных от всех подрешеток, фильтрации и сжатия данных, сохранения результатов съемки в блоке запоминающего устройства (БЗУ). Подобная конструкция позволяет легко масштабировать АФАР при расчете работы на разных орбитах или для получения радиолокационных изображений с лучшим уровнем радиометрической чувствительности.
Так, на фиг. 8 показано: антенная панель (6), комбинирующие устройства по азимуту (7), плата фазовращателей и аттенюаторов (7 каналов) (8), разделители/сумматоры сигналов по азимуту (7 на один канал) (9), внешний цифровой интерфейс (10), контроллер антенной панели (11), усилитель высокой мощности (7 каналов).
В частном случае, структурно каждая подрешетка может состоять из устройства управления - ПЛИС с 8-канальным АЦП / ЦАП, 6 одинаковых антенных панелей, цепи электроснабжения с дублированием, цифровых линий управления и синхронизации, цифровых сигнальных линий. Антенные панели представляют собой самостоятельное радиоэлектронное устройство, содержащее в себе 7 линий по 16 приемо-передающих излучателей (ППИ) в каждой, выполненных по микрополосковой технологии (фиг. 9). Шаг между ППИ равен 23 мм, меньше половины длины волны, что позволяет снизить уровень боковых лепестков излучения антенны. Каждая антенная панель содержит преобразователь частоты вверх, разделитель сигнала на 7 каналов, 7-канальные управляемые фазовращатели, предусилители, аттенюаторы, усилители мощности в передающем тракте; циркуляторы для переключения электрических цепей с передачи на прием; 7-канальные управляемые фазовращатели, малошумящие усилители, преобразователь частоты вниз, сумматор сигналов в приемном тракте. В усилителях используются нитрид-галлиевые транзисторы, имеющие больший КПД по сравнению с арсенид-галлиевыми и кремниевыми, большую радиационную стойкость, температурный диапазон. Радиолокатор работает в импульсном режиме, со скважностью от 4 до 30, поэтому для исключения скачков напряжения и тока в момент излучения импульсов, в каскадах усилителей мощности используются ионисторы (суперконденсаторы) большой емкости.
Антенные панели объединены попарно в фазовые центры, в каждой подрешетке три фазовых центра. Каждый фазовый центр имеет собственную линию АЦП / ЦАП. Используемая в устройстве управления ПЛИС с 8-канальным АЦП / ЦАП задействует только 3 канала в подрешетке для сигналов, 1 канал отводится под цепь калибровки, оставшиеся 4 канала могут быть использованы для обслуживания фазовых центров и цепи калибровки соседней подрешетки. ПЛИС в соседней подрешетке в таком случае может быть отключена и использоваться в режиме «холодного» резервирования, что значительно повышает надежность АФАР и системы в целом.
Для повышения стойкости к радиационному излучению, электронные компоненты, монтируемые в планарном исполнении на тыльной стороне АФАР, защищаются алюминиевыми пластинами, толщина которой для участка устройства управления увеличена.
В данном исполнении АФАР состоит из 45 фазовых центров, каждый из которых имеет собственные цифровые и аналоговые сигнальные цепи. Для дополнительного обеспечения надежности имеется возможность использования всех антенных панелей в подрешетке как одного фазового центра, что потребует 15 сигнальных линий. Данное решение позволяет обеспечить работоспособность системы при 2-3 рабочих устройств управления (включая одну из трех центральных) с незначительным снижением функциональности.
Построение АФАР как цифровой антенной решетки позволяет повысить общую надежность системы, использовать цифровое формирование лучей на передачу и прием. Например, получение трех лучей с разными углами отклонения на приеме возможно одновременно при цифровом сложении сигналов от фазовых центров с разными задержками. При классической реализации в данном случае потребуется использование трех параллельных аналоговых линий и утроения числа АЦП.
В КА предусмотрена система ориентации и стабилизации, которая позволяет осуществлять как левостороннюю, так и правостороннюю съемку, что значительно увеличивает полосу обзора, а также поворот КА на 90° по рысканью для обеспечения детальной съемки. Поворот КА на 90° по рысканью позволяет использовать углы сканирования по азимуту ±25° без механического разворота КА для сопровождения области съемки, в то время как в классическом исполнении в современных РСА значение угла сканирования по азимуту составляет ±2°. Это позволяет значительно увеличить длину синтезированной апертуры, улучшить разрешение по азимуту, использовать накопления сигнала по азимуту для улучшения радиометрической чувствительности.
В качестве высокоскоростной радиолинии передачи целевой информации используется решение на базе активной фазированной решетки с узконаправленным лучом в Х-диапазоне частот. Для увеличения надежности и оперативности сброса целевой информации в составе КА используется две решетки, установленные на левой и правой стороне КА относительно продольной оси радиолокационной полезной нагрузки. Данное решение позволяет осуществлять режим непосредственного сброса (одновременная съемка и сброс изображения на приемную станцию) со скоростями до 1,5 Гбит/с без каких-либо механических приводов наведения, только за счет электронного сканирования, которое может производиться в секторе ±70 градусов от нормали по всем направлениям как по левой стороне, так и по правой стороне движения КА.
Также в устройстве применяется динамическая модуляция, причем индекс модуляции автоматически выбирается системой управления в зависимости от расчетной относительной дальности до приемной станции, что обеспечивает увеличение объема сброса сырого потока до 2-х раз при использовании малоапертурной антенны в составе Земной приемной станции. Вследствие примененных в конструкции силовой рамы материалов, массогабаритные характеристики космического аппарата вследствие указанного выше конструктивного выполнения позволяют размещать до трех аппаратов под обтекателем ракета-носителя (например, под головным обтекателем ракета-носителя «Союз 2.1») (фиг. 11) и производить одновременный групповой запуск.
Наземный комплекс управления КА ДЗЗ (НКУ) использует антенно-поворотный комплекс на базе роботизированного механизма, построенного по схеме гексапод с минимальным диаметром зеркала 2,4 м ÷ 3,5 м и малогабаритными характеристиками, функционирующий как в S, так и X-диапазонах.
НКУ использует радиомодем с прямым и обратным каналом, обладающий высокими эксплуатационными и техническими параметрами с минимальным энергопотреблением.
Наземный комплекс приема и обработки изображений (НКПОИ), также использует антенно-приемное устройство на базе роботизированного механизма, построенного по схеме гексапод с минимальным диаметром зеркала 2,4 м ÷ 4,0 и малыми массогабаритными характеристиками, функционирует как в S и Х-диапазонах длин волн.
В предпочтительных вариантах НКПОИ построен на базе автоматизированных рабочих мест (АРМ), функционирующих с использованием СПО на базе ОС WINDOWS, а также на базе ОС Astra Linux (опционально).
НКПОИ построен с использованием демодулятора, функционирующего в адаптивном режиме с точки зрения видов модуляции в зависимости от угла места, обеспечивает скорость от 480 мбит/с до 1,5 Гбит/с. Данный демодулятор оснащен оригинальным демаппером, позволяющим демодулировать сигналы с произвольными видами модуляции. Настройка сигнального созвездия может быть осуществлена оператором. В демодуляторе реализовано аппаратное декодирование помехоустойчивых кодов и снятие транспортного протокола радиолинии в темпе приема.
Для повышения надежности и времени эксплуатации, а также для работы в условиях ветровых нагрузок антенные системы оснащаются радиопрозрачным укрытием, как можно увидеть на фиг. 12 b.
Для обеспечения максимального суммарного суточного времени сеансов связи с космическими аппаратами земные станции НКУ и приемные станции НКПОИ территориально распределяются/размещаются в необслуживаемых контейнерах, работающих в автоматическом режиме и управляемыми из единого центра.
В состав НКУ и НКПОИ входит комплекс специализированного программного обеспечения (СПО), который может функционировать в двух режимах (автоматический и ручной). Автоматический режим позволяет наземному комплексу функционировать при минимальном вмешательстве оператора. Ручной режим позволяет использовать каждую из частей комплекса СПО по отдельности.
В комплексе СПО НКУ и НКПОИ реализованы следующие функции:
- планирование объектов съемки по всему земному шару и закладки программы на борт КА с выбранным пакетом заданий с НКУ (ЦУП);
- голосовые уведомления оператора о системных событиях и ошибках;
- формирование, отображение и анализ отчетов о проведенных сеансах связи с полной телеметрией оборудования и подсистем;
- отображение в реальном времени полной телеметрии антенно-приемных комплексов (АПК) и демодуляторов (модемов);
- сбор и анализ диагностических данных о состоянии составных частей НКПОИ перед началом и во время проведения сеансов связи;
- отображение критически важной информации обо всех составных частях НКПОИ.
СПО НКУ реализует гибкую систему планирования сеансов связи с КА, поддерживающую большое количество антенно-приемных комплексов (АПК). СПО НКУ и НКПОИ, для эффективной работы операторов, имеет встроенную систему электронной эксплуатационной документации в виде всплывающих сообщений с краткой информацией и ссылкой на подробное описание осуществляемого действия оператора.
Дополнительно СПО НКУ и НКПОИ имеет встроенную электронную систему обучения операторов автоматизированных рабочих мест (АРМ) НКПОИ, которая реализует следующие функции:
- ознакомление и обучение работе с СПО определенного АРМ НКПОИ;
- проведение тестов для определения усвоения материалов, квалификации и ввода в строй операторов АРМ. ЗС и НКПОИ построены на базе удаленной технологии управления и передачи полученной информации в Центр обработки данных через проводной или спутниковый канал связи Ku (Ка)-диапазона.
Дополнительно СПО НКПОИ имеет встроенную электронную систему обработки принятых радиолокационных снимков, оптических снимков и сигналов от системы AIS (Automatic Identification System). При получении снимков второго уровня обработки используются нейросетевые технологии, реализованные на аппаратном нейросетевом модуле. Использование нейросетевых технологий позволяет получать в масштабе времени близком к реальному продукты с тематической обработкой, такие как: комплексное представление радиолокационных и оптических снимков; автоматическое распознавание типов поверхностей, возраста льда, распознавание судов и выявление «темных» судов с отключенным передатчиком сигналов системы AIS.
В заявленном решении НКУ и НКПОИ построены по принципу территориального распределения. Из единого центра обработки данных в автоматическом режиме осуществляется управление функционированием сети контейнерных необслуживаемых станций.
Совместное применение вышеописанных технических решений позволяет добиться значительного улучшения основных характеристик с достижением отмеченных выше технических результатов, а кроме этого значительно удешевить космическую систему как на этапе изготовления, так и на этапе эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Космический комплекс дистанционного зондирования Земли высоко-детального уровня наблюдения наземных объектов | 2020 |
|
RU2753201C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| ВЫСОКОСКОРОСТНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ИНФОРМАЦИИ С КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ С АДАПТИВНОЙ БОРТОВОЙ АППАРАТУРОЙ | 2014 |
|
RU2551900C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| Активная фазированная антенная решетка радиолокационного космического аппарата дистанционного зондирования Земли | 2019 |
|
RU2738160C1 |
| Многофункциональный наземный комплекс управления, приема и обработки информации | 2024 |
|
RU2828016C1 |
| АБОНЕНТСКАЯ ЗЕМНАЯ СТАНЦИЯ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2816866C1 |
| МНОГОПОЗИЦИОННЫЙ MIMO-РАДАР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2024 |
|
RU2838045C1 |
| Способ калибровки радиолокационной станции с активной фазированной антенной решёткой | 2018 |
|
RU2674432C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2719535C1 |


Изобретение относится к информационным космическим системам (КС) для комплексного мониторинга Земли. КС содержит компактные и легкие космические аппараты (КА), взаимодействующие с распределенными наземными комплексами управления, приема и обработки изображений. На борту КА установлены радиолокатор С-диапазона с синтезированной апертурой (на базе активной фазированной антенной решетки – АФАР), оптико-электронные камеры разных диапазонов частот, приемник сигналов системы идентификации судов AIS. Адаптивная высокоскоростная (0,48…1,5 Гбит/с) радиолиния передачи целевой информации включает АФАР с узконаправленным лучом в Х-диапазоне, причем индекс модуляции автоматически выбирается в зависимости от расчетной дальности до приемной станции. Технический результат состоит в расширении информационных возможностей КС и повышении эффективности обмена данными с наземным сегментом. 1 з.п. ф-лы, 12 ил.
1. Космическая система дистанционного зондирования Земли, включающая:
- по меньшей мере один космический аппарат, который построен на силовой раме из алюминиевых и/или карбоновых ферменных конструкций, выполненный с возможностью размещения под головным обтекателем ракеты-носителя;
- наземный комплекс управления (НКУ);
- наземный комплекс приема и обработки изображений (НКПОИ),
и содержащая в составе полезной нагрузки:
- радиолокатор с синтезированной апертурой, построенный с использованием активной фазированной антенной решетки С-диапазона частот;
- оптико-электронные камеры среднего разрешения видимого и инфракрасного диапазонов частот;
- приемник сигналов автоматической идентификации судов AIS;
- аппаратуру передачи целевой информации, которая выполнена на базе активной фазированной антенной решетки с узконаправленным лучом в Х-диапазоне, обеспечивающую адаптивную высокоскоростную радиолинию Х-диапазона с регулированием скорости от 480 Мбит/с до 1,5 Гбит/с, причем индекс модуляции автоматически выбирается системой управления в зависимости от расчетной относительной дальности до приемной станции.
2. Космическая система по п. 1, отличающаяся тем, что станции НКУ и НКПОИ размещены в необслуживаемых контейнерах, работающих в автоматическом режиме и управляемых из единого центра обработки данных.
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| CN 103287588 A, 11.09.2013 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Спутники | |||
| Космические аппараты (спутники) России | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| УСТРОЙСТВА, СИСТЕМА И СПОСОБЫ ДЛЯ ПОЛУЧЕНИЯ ИНФОРМАЦИИ ОБ ЭЛЕКТРОМАГНИТНОЙ ЭНЕРГИИ, ИЗЛУЧАЕМОЙ С ЗЕМЛИ, НАПРИМЕР, ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ПОМЕХ НА ЗЕМЛЕ | 2013 |
|
RU2665704C1 |
| US 9473578 B2, 18.10.2016. | |||

