ОБЛАСТЬ ТЕХНИКИ
[1] Различные варианты реализации, описанные в настоящем документе, в целом относятся к технической области медицинских устройств, а более конкретно к заднему передаточному устройству, медицинскому устройству и хирургическому роботу.
УРОВЕНЬ ТЕХНИКИ
[2] В области робот-ассистированной минимально инвазивной хирургии хирургические инструменты, подсоединенные на конце робота, вводятся в тело человека через разрезы на поверхности тела человека или его естественные проходы, чтобы выполнять операции на тканях в теле человека. Хирургический инструмент в основном содержит эффектор или приспособление (такой как пара хирургических щипцов, режущее приспособление или приспособление для прижигания), установленное на поворотном механизме на переднем конце инструмента, при этом поворотный механизм обеспечивает множество степеней свободы движения переднего конца, главный вал, проходящий от заднего конца инструмента к переднему концу, а также питающее и передаточное устройство на заднем конце инструмента. Эффектор на переднем конце поворотного механизма в целом приводится в действие множеством тросов, прикрепленных к нему, при этом тросы проходят через главный вал хирургического инструмента и приводятся в действие питающим и передаточным устройством на заднем конце.
[3] В случае хирургических щипцов и других удерживающих или режущих приспособлений, поворотному механизму в целом необходимо реализовывать три степени свободы: тангаж, рыскание и взятие. Взаимодействуя с дополнительными степенями свободы заднего конца робота, поворотный механизм может осуществлять движение, необходимое для выполнения хирургических операций. В зависимости от конкретной реализации поворотного механизма, количество приводным тросов, необходимых для поворотного механизма, меняется, например, для поворотного механизма в целом предусмотрено от 4 до 6 тросов. Кроме того, для осуществления крупномасштабного движения (например, вращения от угла -90° до угла 90°) каждого шарнира поворотного механизма, необходимо разместить дополнительные шкивы на поворотном механизме для направления тросов. Однако добавление дополнительных шкивов может препятствовать миниатюризации переднего конца хирургического инструмента, а использование большего количества тросов также может увеличить размер и повысить стоимость инструмента.
[4] Имеющееся заднее передаточное устройство для приведения в действие 4-тросового поворотного механизма осуществляет выпуск двух тросов и втягивание двух других тросов посредством поворота соединительной штанги или коромысла, тем самым осуществляя тангаж поворотного механизма. Таким образом, при изменении угла тангажа длина втягиваемого троса не равняется длине выпущенного троса, что может привести к изменению натяжения тросов и впоследствии привести к таким проблемам, как уменьшение точности ввиду ошибки передачи, вызванной ослабленными тросами, или ускорение износа ввиду избыточного фрикционного сопротивления, вызванного чрезмерным натяжением тросов. Одним путем предотвращения таких проблем является ограничение диапазона угла вращения шарнира тангажа, однако этот путь может повлиять на работоспособность инструмента. Кроме того, при использовании этого механизма угол вращения выходного зажима мотора на заднем конце находится в нелинейной взаимосвязи с углом тангажа поворотного механизма, что требует дополнительной калибровки для достижения точного управления позиционированием, тем самым увеличивая дополнительную рабочую нагрузку.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[5] В этом разделе представлен ряд упрощенных концепций, которые будут описаны далее в подробном описании. Данный раздел заявки не ставит перед собой цель ограничить ключевые и существенные технические признаки заявленного технического решения, а также не определяет объем защиты заявленного технического решения.
[6] В вариантах реализации изобретения представлено заднее передаточное устройство, которое содержит первый вращающийся элемент, второй вращающийся элемент, третий вращающийся элемент, первый передаточный узел и второй передаточный узел. Первый передаточный узел соединен с первым тросом и вторым тросом, а также соединен с первым вращающимся элементом и третьим вращающимся элементом. Второй передаточный узел соединен с третьим тросом и четвертым тросом, а также соединен со вторым вращающимся элементом и третьим вращающимся элементом. Первый вращающийся элемент выполнен с возможностью вращения для втягивания одного троса из первого троса и второго троса, а также для одновременного выпуска другого троса из первого троса и второго троса посредством первого передаточного узла. Второй вращающийся элемент выполнен с возможностью вращения для втягивания одного троса из третьего троса и четвертого троса, а также для одновременного выпуска другого троса из третьего троса и четвертого троса посредством второго передаточного узла. Третий вращающийся элемент выполнен с возможностью вращения для выполнения, посредством первого передаточного узла и второго передаточного узла: втягивания по меньшей мере одного троса из первого троса и второго троса, при этом выпуская по меньшей мере один трос из третьего троса и четвертого троса; или втягивания по меньшей мере одного троса из третьего троса и четвертого троса, при этом выпуская по меньшей мере один трос из первого троса и второго троса.
[7] В соответствии с вариантом реализации настоящего изобретения, заднее передаточное устройство соединено с четырьмя приводными тросами поворотного механизма таким образом, что поворотный механизм функционирует согласованно с задним передаточным устройством для достижения поворотным механизмом тангажа, рыскания и взятия путем втягивания или выпуска приводных тросов (т.е. первого троса, второго троса, третьего троса и четвертого троса), что предполагает простую конструкцию и точную передачу. Кроме того, угол вращения вращающегося элемента находится в линейной связи с углом тангажа, углом рыскания или углом взятия поворотного механизма, а, следовательно, выпуск и/или втягивание приводных тросов на одинаковое расстояние могут быть достигнуты даже тогда, когда вышеуказанные углы поворотного механизма варьируются в пределах широкого диапазона.
[8] В некоторых вариантах реализации первый вращающийся элемент выполнен с возможностью вращения вокруг первой центральной оси первого вращающегося элемента, второй вращающийся элемент выполнен с возможностью вращения вокруг второй центральной оси второго вращающегося элемента, а третий вращающийся элемент выполнен с возможностью вращения вокруг третьей центральной оси третьего вращающегося элемента; при этом первая центральная ось параллельна второй центральной оси и параллельна третьей центральной оси.
[9] В некоторых вариантах реализации первый передаточный узел содержит первый подвижный шкив, первый передаточный трос, второй подвижный шкив и второй передаточный трос. Первый подвижный шкив соединен с первым тросом. Первый передаточный трос охватывает первый подвижный шкив, при этом один конец первого передаточного троса соединен с первым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом. Второй подвижный шкив выполнен с возможностью вращения вокруг второго вала и соединен со вторым тросом. Второй передаточный трос охватывает второй подвижный шкив, при этом один конец второго передаточного троса соединен с первым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом. Первый передаточный трос проходит вокруг первого вращающегося элемента в направлении, противоположном направлению, в котором второй передаточный трос проходит вокруг первого вращающегося элемента, а также первый передаточный трос проходит вокруг третьего вращающегося элемента в том же направлении, в котором второй передаточный трос проходит вокруг третьего вращающегося элемента. При вращении первого вращающегося элемента или третьего вращающегося элемента первый подвижный шкив приводится в движение первым передаточным тросом, а второй подвижный шкив приводится в движение вторым передаточным тросом.
[10] В некоторых вариантах реализации первый передаточный узел дополнительно содержит первый направляющий шкив, причем часть первого передаточного троса, расположенная между первым вращающимся элементом и первым подвижным шкивом, охватывает первый направляющий шкив таким образом, что часть первого передаточного троса, расположенная между первым направляющим шкивом и первым подвижным шкивом, параллельна части первого передаточного троса, расположенной между первым подвижным шкивом и третьим вращающимся элементом.
[11] В некоторых вариантах реализации часть второго передаточного троса, расположенная между первым вращающимся элементом и вторым подвижным шкивом, параллельна части второго передаточного троса, расположенной между вторым подвижным шкивом и третьим вращающимся элементом, а также параллельна части первого передаточного троса, расположенной между первым подвижным шкивом и третьим вращающимся элементом.
[12] В некоторых вариантах реализации второй передаточный узел содержит третий подвижный шкив, третий передаточный трос, четвертый подвижный шкив и четвертый передаточный трос. Третий подвижный шкив соединен с третьим тросом. Третий передаточный трос охватывает третий подвижный шкив, при этом один конец третьего передаточного троса соединен со вторым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом. Четвертый подвижный шкив выполнен с возможностью вращения вокруг четвертого вала и соединен с четвертым тросом. Четвертый передаточный трос охватывает четвертый подвижный шкив, при этом один конец четвертого передаточного троса соединен со вторым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом. Третий передаточный трос проходит вокруг второго вращающегося элемента в направлении, противоположном направлению, в котором четвертый передаточный трос проходит вокруг второго вращающегося элемента, а каждый трос из третьего передаточного троса и четвертого передаточного троса проходит вокруг третьего вращающегося элемента в направлении, противоположном направлению, в котором каждый из первого передаточного троса и второго передаточного троса проходит вокруг третьего вращающегося элемента. При вращении второго вращающегося элемента или третьего вращающегося элемента третий подвижный шкив приводится в движение третьим передаточным тросом, а четвертый подвижный шкив приводится в движение четвертым передаточным тросом.
[13] В некоторых вариантах реализации первый подвижный шкив соединен с возможностью поворота с первым седлом шкива посредством первого вала, при этом первое седло шкива соединено с первым тросом, а второй подвижный шкив соединен с возможностью поворота со вторым седлом шкива посредством второго вала, при этом второе седло шкива соединено со вторым тросом, причем первый вал параллелен второму валу и параллелен первой центральной оси; и/или третий подвижный шкив соединен с возможностью поворота с третьим седлом шкива посредством третьего вала, при этом третье седло шкива соединено с третьим тросом, а четвертый подвижный шкив соединен с возможностью поворота с четвертым седлом шкива посредством четвертого вала, при этом четвертое седло шкива соединено с четвертым тросом, причем третий вал параллелен четвертому валу и параллелен первой центральной оси.
[14] В некоторых вариантах реализации второй передаточный узел дополнительно содержит второй направляющий шкив, причем часть четвертого передаточного троса, расположенная между вторым вращающимся элементом и четвертым подвижным шкивом, охватывает второй направляющий шкив таким образом, что часть четвертого передаточного троса, расположенная между вторым направляющим шкивом и четвертым подвижным шкивом, параллельна части четвертого передаточного троса, расположенной между четвертым подвижным шкивом и третьим вращающимся элементом.
[15] В некоторых вариантах реализации часть третьего передаточного троса, расположенная между вторым вращающимся элементом и третьим подвижным шкивом, параллельна части третьего передаточного троса, расположенной между третьим подвижным шкивом и третьим вращающимся элементом, а также параллельна части четвертого передаточного троса, расположенной между четвертым подвижным шкивом и третьим вращающимся элементом.
[16] В вариантах реализации изобретения также представлено медицинское устройство, содержащее заднее передаточное устройство, описанное в любом варианте реализации изобретения.
[17] В вариантах реализации изобретения также представлен хирургический робот, содержащий медицинское устройство, описанное в любом варианте реализации изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[18] Описанные далее чертежи изобретения используются в настоящем документе в качестве части всего описания для обеспечения понимания изобретения. Варианты реализации настоящего изобретения описаны со ссылкой на сопроводительные чертежи для разъяснения принципов настоящего изобретения.
[19] На ФИГ. 1 изображен схематический конструктивный вид хирургического робота, согласно вариантам реализации настоящего изобретения.
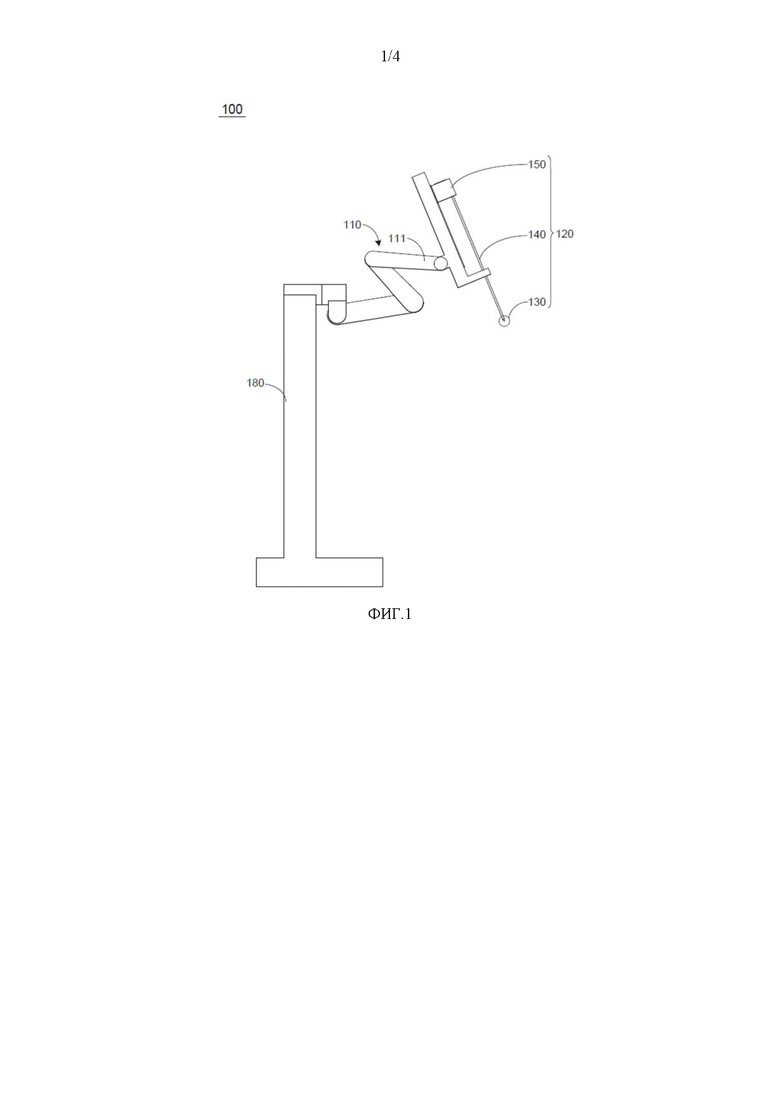
[20] На ФИГ. 2 изображен схематический частичный конструктивный вид хирургического робота, изображенного на ФИГ. 1, содержащего поворотный механизм, первый трос, второй трос, третий трос и четвертый трос.
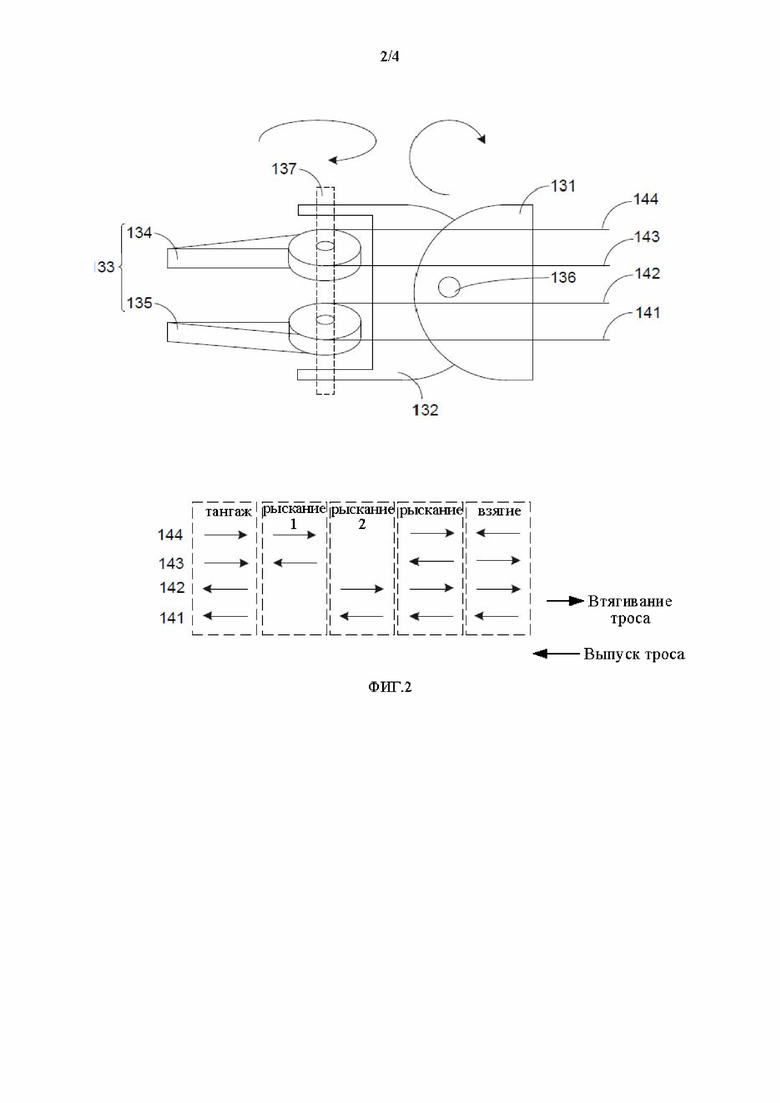
[21] На ФИГ. 3 изображен другой схематический частичный конструктивный вид хирургического робота, изображенного на ФИГ. 1, содержащего заднее передаточное устройство, первый трос, второй трос, третий трос и четвертый трос.
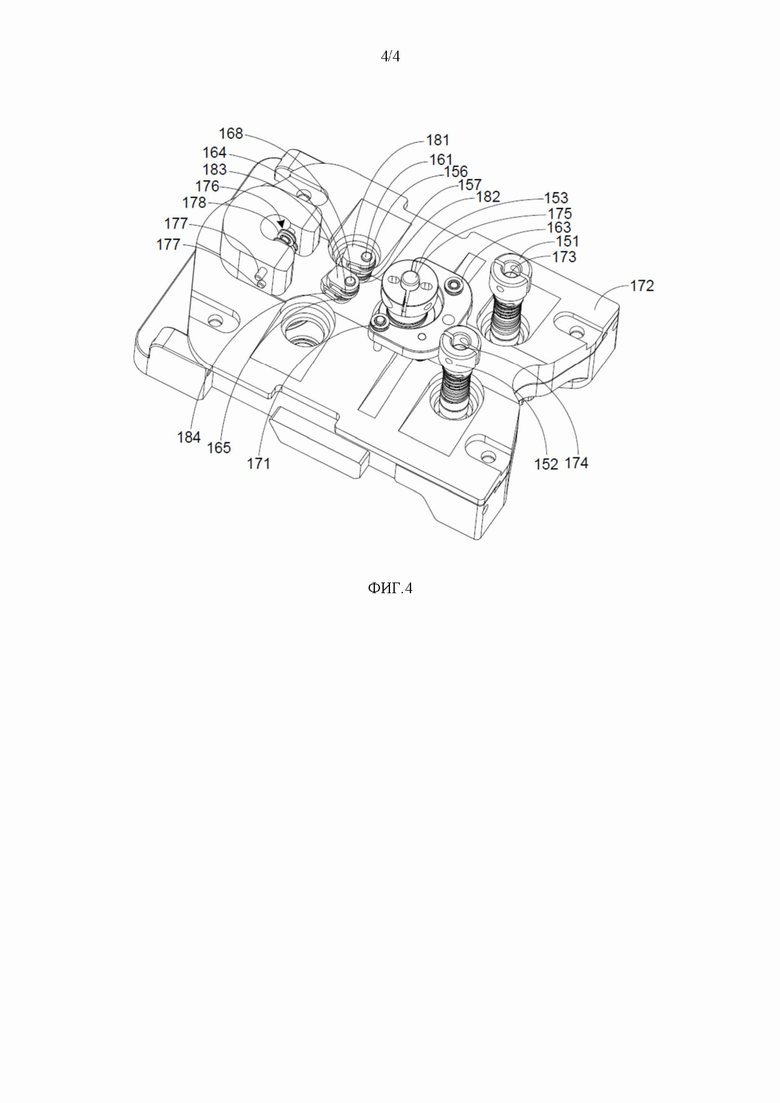
[22] На ФИГ. 4 изображен схематический частичный конструктивный вид заднего передаточного устройства, являющегося частью хирургического робота, изображенного на ФИГ. 1.
[23] Изображенные ссылочные обозначения расшифровываются следующим образом:
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
[24] Далее в описании представлена детализированная иллюстрация для обеспечения более полного понимания изобретения. Однако специалисту в данной области техники будет ясно, что варианты реализации настоящего изобретения могут быть осуществлены на практике без одной или более этих деталей. В других примерах некоторые технические признаки, которые являются общеизвестными в данной области техники, не описываются во избежание внесения путаницы в варианты реализации настоящего изобретения.
[25] Для обеспечения полного понимания вариантов реализации настоящего изобретения далее в описании будут изложены детализированные конструкции. Очевидно, что осуществление вариантов реализации настоящего изобретения не ограничивается конкретными деталями, известными специалисту в данной области техники. Следует отметить, что порядковые номера, такие как «первый» и «второй», которые упоминаются в описании, являются лишь идентификаторами и не имеют какого-либо другого значения, например, не определяют конкретный порядок. Кроме того, например, выражение «первый компонент/элемент» не предполагает наличия «второго компонента/элемента», а выражение «второй компонент/элемент» не предполагает наличия «первого компонента/элемента». Термины «вверх», «вниз», «вперед», «назад», «влево», «вправо» и подобные выражения, используемые в описании, предназначены лишь для разъяснения изобретения, а не для его ограничения.
[26] Как показано на ФИГ. 1, в вариантах реализации настоящего изобретения представлено заднее передаточное устройство 150, медицинское устройство 120 и хирургический робот 100. Хирургический робот 100 содержит подвижную роботизированную руку 110 и медицинское устройство 120, прикрепленное к роботизированной руке 110. Медицинское устройство 120 содержит заднее передаточное устройство 150. Как известно в области техники, медицинское устройство 120 может выполнять ряд функций и содержит, но без ограничения, пару хирургических щипцов или захватов, имеющих различные формы и размеры, иглодержатель, пару ножниц или приспособления для прижигания.
[27] Как показано на ФИГ. 1, хирургический робот 100 в основном содержит основание 180, по меньшей мере одну роботизированную руку 110, расположенную с возможностью вращения на верхнем конце основания 180, и по меньшей мере одно медицинское устройство 120. Каждое медицинское устройство 120 установлено в порту соответствующей роботизированной руки 110. В качестве примера лишь одна роботизированная рука 110 изображена на ФИГ. 1, и эта роботизированная рука 110 содержит множество последовательно соединенных звеньев 111, при этом каждое звено из множества звеньев 111 выполнено с возможностью вращения. Если хирургический робот 100 содержит множество роботизированных рук 110, то каждая роботизированная рука 110 оснащена соответствующим медицинским устройством 120, установленным в порту роботизированной руки 110. Каждое медицинское устройство 120 съемным образом соединено с соответствующей роботизированной рукой 110 для обеспечения возможности замены или ремонта медицинского устройства 120. Таким образом, медицинское устройство 120, прикрепленное к соответствующей роботизированной руке 110, может использоваться для выполнения конкретной медицинской процедуры или может быть заменено во время выполнения медицинской процедуры для реализации желаемой клинической функции.
[28] Роботизированная рука 110 содержит по меньшей мере один установочный порт. По меньшей мере один установочный порт в целом содержит выход приводного мотора, выполненного с возможностью подачи механической энергии для работы медицинского устройства 120. По меньшей мере один установочный порт может дополнительно содержать электрический интерфейс, с которым соединяется медицинское устройство 120, для определения типа устройства, соединенного с установочным портом, и для получения параметров устройства.
[29] Медицинское устройство 120 в целом содержит заднее передаточное устройство 150, главный вал 140, проходящий от заднего передаточного устройства 150, и поворотный механизм 130 на дальнем конце главного вала 140. Приводные тросы (в том числе, в частности, первый трос 141, второй трос 142, третий трос 143 и четвертый трос 144) и электрический проводник, которые соединены с поворотным механизмом 130, могут проходить через главный вал 140 и соединены с задним передаточным устройством 150. Заднее передаточное устройство 150 выполнено с возможностью обеспечения механического соединения между описанными выше приводными тросами и валом приводного мотора для управления поворотным механизмом 130 путем управления движением и натяжением приводных тросов. Главный вал 140 является полым и может быть жестким или гибким.
[30] Как показано на ФИГ. 2, поворотный механизм 130 содержит проксимальную скобу 131, дистальную скобу 132 и эффектор 133. Дистальная скоба 132 соединена с возможностью поворота с проксимальной скобой 131 посредством первого болта 136 таким образом, что тангаж поворотного механизма 130 осуществляется через вращение дистальной скобы 132 относительно проксимальной скобы 131. Эффектор 133 содержит верхний зубец 134 и нижний зубец 135. Каждый зубец из верхнего зубца 134 и нижнего зубца 135 соединен с возможностью поворота с дистальной скобой 132 через второй болт 137 таким образом, что взятие и рыскание поворотного механизма 130 осуществляются через вращение зубцов 134, 135 относительно дистальной скобы 132. В некоторых вариантах реализации второй болт 137 перпендикулярен первому болту 136.
[31] Первый трос 141 и второй трос 142 намотаны на нижний зубец 135 эффектора 133 и соединены с ним. То есть первый трос 141 и второй трос 142 могут быть выполнены как единое целое из одного непрерывного троса, обмотанного вокруг нижнего зубца 135. Третий трос 143 и четвертый трос 144 намотаны на верхний зубец 134 эффектора 133 и соединены с ним. То есть третий трос 143 и четвертый трос 144 могут быть выполнены как единое целое из одного непрерывного троса, обмотанного вокруг верхнего зубца 134. Первый трос 141, второй трос 142, третий трос 143 и четвертый трос 144 проходят по твердым поверхностям направляющих каналов (не показаны), образуемых эффектором 133, дистальной скобой 132 и проксимальной скобой 131, а затем доходят до заднего передаточного устройства 150 вдоль главного вала 140. Направляющий канал может представлять собой канавку, имеющую U-образное или полукруглое поперечное сечение.
[32] Далее, как показано на ФИГ. 2, путем втягивания третьего троса 143 и четвертого троса 144 на одинаковую длину, при этом выпуская первый трос 141 и второй трос 142 на одинаковую длину, дистальная скоба 132 вращается по часовой стрелке вокруг первого болта 136 относительно проксимальной скобы 131 для достижения тангажа поворотного механизма 130 в одном направлении (как показано на ФИГ. 2). Подобным образом, путем втягивания первого троса 141 и второго троса 142 на одинаковую длину, при этом выпуская первый трос 143 и четвертый трос 144 на одинаковую длину, дистальная скоба 132 вращается против часовой стрелки вокруг первого болта 136 относительно проксимальной скобы 131 для достижения тангажа поворотного механизма 130 в противоположном направлении.
[33] Верхний зубец 134 вращается по часовой стрелке вокруг второго болта 137 относительно дистальной скобы 132 путем втягивания четвертого троса 144 и одновременного выпуска третьего троса 143 на одинаковую длину (см. рыскание 1 на ФИГ. 2). Подобным образом, верхний зубец 134 вращается против часовой стрелки вокруг второго болта 137 относительно дистальной скобы 132 путем втягивания третьего троса 143 и одновременного выпуска четвертого троса 144 на одинаковую длину. Нижний зубец 135 вращается по часовой стрелке вокруг второго болта 137 относительно дистальной скобы 132 путем втягивания второго троса 142 и одновременного выпуска первого троса 141 на одинаковую длину (см. рыскание 2 на ФИГ. 2). Подобным образом, нижний зубец 135 вращается против часовой стрелки вокруг второго болта 137 относительно дистальной скобы 132 путем втягивания первого троса 141 и одновременного выпуска второго троса 142 на одинаковую длину. Эффектор 133 может выполнять рыскание и взятие благодаря совместному движению верхнего зубца 134 и нижнего зубца 135, которое подробно описано ниже.
[34] Как показано на ФИГ. 3 и 4, заднее передаточное устройство 150 в основном содержит первый вращающийся элемент 151, второй вращающийся элемент 152, третий вращающийся элемент 153, первый передаточный узел, второй передаточный узел, первый вращающийся вал 173, второй вращающийся вал 174, третий вращающийся вал 175 и шасси 172. Каждый вал из первого вращающегося вала 173, второго вращающегося вала 174 и третьего вращающегося вала 175 прикреплен с возможностью вращения к шасси 172, а также соединен с соответствующим приводным мотором. Каждый узел из первого передаточного узла и второго передаточного узла соединен с шасси 172. Шасси 172 имеет множество интерфейсов, при этом каждый интерфейс из множества интерфейсов соответствует одному приводному мотору таким образом, что каждый вал из первого вращающегося вала 173, второго вращающегося вала 174 и третьего вращающегося вала 175 может быть устойчиво соединен с соответствующим приводным мотором при надлежащей установке медицинского устройства 120, чтобы осуществлять передачу вращательного движения.
[35] Хирургический робот 100 может содержать по меньшей мере три приводных мотора. Три приводных мотора соединены с первым вращающимся валом 173, вторым вращающимся валом 174 и третьим вращающимся валом 175 соответственно. Первый вращающийся вал 173, второй вращающийся вал 174 и третий вращающийся вал 175 расположены параллельно друг другу. Первый вращающийся вал 173, второй вращающийся вал 174 и третий вращающийся вал 175 расположены, соответственно, в трех вершинах, по существу, треугольника. Следует понимать, что нет какого-либо ограничения в отношении расположения первого вращающегося вала 173, второго вращающегося вала 174 и третьего вращающегося вала 175. Первый вращающийся вал 173, второй вращающийся вал 174 и третий вращающийся вал 175 также могут быть расположены на прямой линии при необходимости. Первый вращающийся вал 173 неподвижно соединен с первым вращающимся элементом 151 для приведения во вращение первого вращающегося элемента 151. Второй вращающийся вал 174 неподвижно соединен со вторым вращающимся элементом 152 для приведения во вращение второго вращающегося элемента 152. Третий вращающийся вал 175 неподвижно соединен с третьим вращающимся элементом 153 для приведения во вращение третьего вращающегося элемента 153. В вариантах реализации изобретения каждый элемент из первого вращающегося элемента 151, второго вращающегося элемента 152 и третьего вращающегося элемента 153 представляет собой катушку.
[36] Первый передаточный узел соединен с первым тросом 141 и вторым тросом 142, а также соединен с первым вращающимся элементом 151 и третьим вращающимся элементом 153. Первый передаточный узел в основном содержит первый подвижный шкив 156, второй подвижный шкив 157, первый передаточный трос 158 и второй передаточный трос 159. Первый подвижный шкив 156 соединен с возможностью поворота с первым седлом 181 шкива посредством первого вала 161, при этом первый подвижный шкив 156 выполнен с возможностью поворота вокруг первого вала 161, а первый трос 141 соединен с первым седлом 181 шкива. Второй подвижный шкив 157 соединен с возможностью поворота со вторым седлом 182 шкива посредством второго вала 162, при этом второй подвижный шкив 157 выполнен с возможностью поворота вокруг второго вала 162, а второй трос 142 соединен со вторым седлом 182 шкива.
[37] Первый передаточный трос 158 охватывает первый подвижный шкив 156. Один конец первого передаточного троса 158 соединен с первым вращающимся элементом 151, а другой его конец соединен с третьим вращающимся элементом 153. Второй передаточный трос 159 охватывает второй подвижный шкив 157. Один конец второго передаточного троса 159 соединен с первым вращающимся элементом 151, а другой его конец соединен с третьим вращающимся элементом 153. В частности, первый передаточный трос 158 и второй передаточный трос 159 проходят вокруг первого вращающегося элемента 151 в противоположных направлениях, а также проходят вокруг третьего вращающегося элемента 153 в одном и том же направлении. При вращении первого вращающегося элемента 151 или третьего вращающегося элемента 153 первый подвижный шкив 156 приводится в движение первым передаточным тросом 158, а второй подвижный шкив 157 приводится в движение вторым передаточным тросом 159.
[38] Первый передаточный узел также содержит первый направляющий шкив 163. Часть первого передаточного троса 158, расположенная между первым вращающимся элементом 151 и первым подвижным шкивом 156, охватывает первый направляющий шкив 163. Таким образом, часть первого передаточного троса 158, расположенная между первым направляющим шкивом 163 и первым подвижным шкивом 156, параллельна другой части первого передаточного троса 158, расположенной между первым подвижным шкивом 156 и третьим вращающимся элементом 153, при этом абсолютное значение линейной скорости части первого передаточного троса 158, расположенной между первым направляющим шкивом 163 и первым подвижным шкивом 156, равняется абсолютному значению линейной скорости другой части первого передаточного троса 158, расположенной между первым подвижным шкивом 156 и третьим вращающимся элементом 153. Иными словами, линейная скорость части первого передаточного троса 158 с одной стороны из двух противоположных сторон первого подвижного шкива 156 и линейная скорость другой части первого передаточного троса 158 с другой стороны из двух противоположных сторон первого подвижного шкива 156 имеют одинаковое абсолютное значение. Часть второго передаточного троса 159, расположенная между первым вращающимся элементом 151 и вторым подвижным шкивом 157 параллельна другой части второго передаточного троса 159, расположенной между вторым подвижным шкивом 157 и третьим вращающимся элементом 153, а также параллельна другой части первого передаточного троса 158, расположенной между первым подвижным шкивом 156 и третьим вращающимся элементом 153. Иными словами, линейная скорость части второго передаточного троса 159, расположенной с одной стороны из двух противоположных сторон второго подвижного шкива 157, и линейная скорость другой части второго передаточного троса 159, расположенной с другой стороны из двух противоположных сторон второго подвижного шкива 157, имеют одинаковое абсолютное значение. Первый направляющий шкив 163 может быть неподвижным шкивом. Следует понимать, что для направления первого передаточного троса 158 и второго передаточного троса 159 при необходимости могут использоваться дополнительные направляющие шкивы.
[39] Первый вращающийся элемент 151 выполнен с возможностью вращения вокруг первой центральной оси A1 первого вращающегося элемента 151 для втягивания одного троса из первого троса 141 и второго троса 142, при этом выпуская другой трос из первого троса 141 и второго троса 142 посредством первого передаточного узла таким образом, чтобы обеспечивать вращение нижнего зубца 135 по часовой стрелке или против часовой стрелки вокруг второго болта 137 относительно дистальной скобы 132. В варианте реализации первый вал 161 параллелен второму валу 162, а также параллелен первой центральной оси A1.
[40] В частности, в стационарном положении третьего вращающегося элемента 153, когда приводной мотор управляет первым вращающимся валом 173 для того, чтобы он приводил во вращение первый вращающийся элемент 151 против часовой стрелки, второй передаточный трос 159 втягивается (т.е. проходит вокруг/наматывается на первый вращающийся элемент 151), а первый передаточный трос 158 одновременно выпускается на одинаковую длину. Таким образом, второй трос 142 втягивается посредством второго подвижного шкива 157, а первый трос 141 одновременно выпускается посредством первого подвижного шкива 156 на одинаковую длину, тем самым осуществляя вращение нижнего зубца 135 по часовой стрелке вокруг второго болта 137 относительно дистальной скобы 132 (см. рыскание 2 на ФИГ. 2). В стационарном положении третьего вращающегося элемента 153, когда приводной мотор управляет первым вращающимся валом 173 для того, чтобы он приводил во вращение первый вращающийся элемент 151 по часовой стрелке, первый передаточный трос 158 втягивается (т.е. проходит вокруг/наматывается на первый вращающийся элемент 151), а второй передаточный трос 159 одновременно выпускается на одинаковую длину. Таким образом, первый трос 141 втягивается посредством первого подвижного шкива 156, а второй трос 142 одновременно выпускается посредством второго подвижного шкива 157 на одинаковую длину, тем самым осуществляя вращение нижнего зубца 135 против часовой стрелки вокруг второго болта 137 относительно дистальной скобы 132.
[41] Как показано далее на ФИГ. 3 и 4, второй передаточный узел соединен с третьим тросом 143 и четвертым тросом 144, а также соединен со вторым вращающимся элементом 152 и третьим вращающимся элементом 153. Второй передаточный узел содержит третий подвижный шкив 164, четвертый подвижный шкив 165, третий передаточный трос 166 и четвертый передаточный трос 167. Третий подвижный шкив 164 соединен с возможностью поворота с третьим седлом 183 шкива посредством третьего вала 168, при этом третий подвижный шкив 164 выполнен с возможностью поворота вокруг третьего вала 168, а третий трос 143 соединен с третьим седлом 183 шкива. Четвертый подвижный шкив 165 соединен с возможностью поворота с четвертым седлом 184 шкива посредством четвертого вала 169, при этом четвертый подвижный шкив 165 выполнен с возможностью поворота вокруг четвертого вала 169, а четвертый трос 144 соединен с четвертым седлом 184 шкива.
[42] Третий передаточный трос 166 охватывает третий подвижный шкив 164. Один конец третьего передаточного троса 166 соединен со вторым вращающимся элементом 152, а другой его конец соединен с третьим вращающимся элементом 153. Четвертый передаточный трос 167 охватывает четвертый подвижный шкив 165. Один конец четвертого передаточного троса 167 соединен со вторым вращающимся элементом 152, а другой его конец соединен с третьим вращающимся элементом 153. В частности, третий передаточный трос 166 и четвертый передаточный трос 167 проходят вокруг второго вращающегося элемента 152 в противоположных направлениях, а направление, в котором третий передаточный трос 166 и четвертый передаточный трос 167 проходят вокруг третьего вращающегося элемента 153, противоположно направлению, в котором первый передаточный трос 158 и второй передаточный трос 159 проходят вокруг третьего вращающегося элемента 153. Иными словами, третий передаточный трос 166 и четвертый передаточный трос 167 проходят вокруг третьего вращающегося элемента 153 в одинаковом направлении. При вращении второго вращающегося элемента 152 или третьего вращающегося элемента 153 третий подвижный шкив 164 приводится в движение третьим передаточным тросом 166, а четвертый подвижный шкив 165 приводится в движение четвертым передаточным тросом 167.
[43] Второй передаточный узел также содержит второй направляющий шкив 171. Часть четвертого передаточного троса 167, расположенная между вторым вращающимся элементом 152 и четвертым подвижным шкивом 165, охватывает второй направляющий шкив 171. Таким образом, часть четвертого передаточного троса 167, расположенная между вторым направляющим шкивом 171 и четвертым подвижным шкивом 165, параллельна другой части четвертого передаточного троса 167, расположенной между четвертым подвижным шкивом 165 и третьим вращающимся элементом 153. Часть третьего передаточного троса 166, расположенная между вторым вращающимся элементом 152 и третьим подвижным шкивом 164 параллельна другой части третьего передаточного троса 166, расположенной между третьим подвижным шкивом 164 и третьим вращающимся элементом 153, а также параллельна другой части четвертого передаточного троса 167, расположенной между четвертым подвижным шкивом 165 и третьим вращающимся элементом 153. Второй направляющий шкив 171 может быть неподвижным шкивом. Следует понимать, что для направления третьего передаточного троса 166 и четвертого передаточного троса 167 при необходимости могут использоваться дополнительные направляющие шкивы.
[44] Второй вращающийся элемент 152 выполнен с возможностью вращения вокруг второй центральной оси A2 второго вращающегося элемента 152 для втягивания одного троса из третьего троса 143 и четвертого троса 144, при этом выпуская другой трос из третьего троса 143 и четвертого троса 144 посредством второго передаточного узла таким образом, чтобы обеспечивать вращение верхнего зубца 134 по часовой стрелке или против часовой стрелки вокруг второго болта 137 относительно дистальной скобы 132. В варианте реализации третий вал 168 параллелен четвертому валу 169, а также параллелен второй центральной оси A2.
[45] В частности, в стационарном положении третьего вращающегося элемента 153, когда приводной мотор управляет вторым вращающимся валом 174 для того, чтобы он приводил во вращение второй вращающийся элемент 152 против часовой стрелки, четвертый передаточный трос 167 втягивается (т.е. проходит вокруг/наматывается на второй вращающийся элемент 152), а третий передаточный трос 166 одновременно выпускается на одинаковую длину. Таким образом, четвертый трос 144 втягивается посредством четвертого подвижного шкива 165, а третий трос 143 одновременно выпускается посредством третьего подвижного шкива 164 на одинаковую длину, чтобы верхний зубец 134 вращался по часовой стрелке вокруг второго болта 137 относительно дистальной скобы 132 (см. рыскание 1 на ФИГ. 2). В стационарном положении третьего вращающегося элемента 153, когда приводной мотор управляет вторым вращающимся валом 174 для того, чтобы он приводил во вращение второй вращающийся элемент 152 по часовой стрелке, третий передаточный трос 166 втягивается (т.е. проходит вокруг/наматывается на второй вращающийся элемент 152), а четвертый передаточный трос 167 одновременно выпускается на одинаковую длину. Таким образом, третий трос 143 втягивается посредством третьего подвижного шкива 164, а четвертый трос 144 одновременно выпускается посредством четвертого подвижного шкива 165 на одинаковую длину, чтобы верхний зубец 134 вращался против часовой стрелки вокруг второго болта 137 относительно дистальной скобы 132.
[46] Заднее передаточное устройство 150 дополнительно содержит комплект 176 третьего направляющего шкива (см. ФИГ. 4). Комплект 176 третьего направляющего шкива содержит два пятых вала 177, параллельных друг другу, при этом каждый вал из пятых валов 177 оснащен двумя третьими направляющими шкивами 178, расположенными на нем с возможностью поворота. Каждый третий направляющий шкив 178 может быть неподвижным шкивом.
[47] Четыре третьих направляющих шкива 178 направляют первый трос 141, второй трос 142, третий трос 143 и четвертый трос 144, соответственно. Таким образом, часть первого троса 141, расположенная между комплектом 176 третьего направляющего шкива и первым подвижным шкивом 156, параллельна другой части первого передаточного троса 158, расположенной между первым подвижным шкивом 156 и третьим вращающимся элементом 153. Кроме того, часть второго троса 142, расположенная между комплектом 176 третьего направляющего шкива и вторым подвижным шкивом 157, параллельна другой части второго передаточного троса 159, расположенной между вторым подвижным шкивом 157 и третьим вращающимся элементом 153. Кроме того, часть третьего троса 143, расположенная между комплектом 176 третьего направляющего шкива и третьим подвижным шкивом 164, параллельна другой части третьего передаточного троса 166, расположенной между третьим подвижным шкивом 164 и третьим вращающимся элементом 153. Кроме того, часть четвертого троса 144, расположенная между комплектом 176 третьего направляющего шкива и четвертым подвижным шкивом 165, параллельна другой части четвертого передаточного троса 167, расположенной между четвертым подвижным шкивом 165 и третьим вращающимся элементом 153. Благодаря этому обеспечивается возможность достижения линейной комбинации первого троса 141 и второго троса 142, приведенных в действие первым вращающимся элементом 151 и третьим вращающимся элементом 153, а также линейная комбинация третьего троса 143 и четвертого троса 144, приведенных в действие вторым вращающимся элементом 152 и третьим вращающимся элементом 153.
[48] В этом варианте реализации, путем управления вращением первого вращающегося вала 173 и второго вращающегося вала 174 могут достигаться рыскание и взятие эффектора 133.
[49] В частности, в стационарном положении третьего вращающегося вала 175, когда первый вращающийся вал 173 и второй вращающийся вал 174 вращаются против часовой стрелки под одинаковыми углами, то есть когда первый вращающийся элемент 151 и второй вращающийся элемент 152 вращаются против часовой стрелки под одинаковыми углами, верхний зубец 134 и нижний зубец 135 вращаются по часовой стрелке, тем самым осуществляя рыскание эффектора 133 в одном направлении (см. ФИГ. 2). В стационарном положении третьего вращающегося вала 175, когда первый вращающийся вал 173 и второй вращающийся вал 174 вращаются по часовой стрелке под одинаковыми углами, то есть когда первый вращающийся элемент 151 и второй вращающийся элемент 152 вращаются по часовой стрелке под одинаковыми углами, верхний зубец 134 и нижний зубец 135 вращаются против часовой стрелки, тем самым осуществляя рыскание эффектора 133 в обратном направлении.
[50] В стационарном положении третьего вращающегося вала 175, когда первый вращающийся вал 173 вращается против часовой стрелки, а второй вращающийся вал 174 одновременно вращается по часовой стрелке под одинаковыми углами, то есть когда первый вращающийся элемент 151 вращается против часовой стрелки, а второй вращающийся элемент 152 одновременно вращается по часовой стрелке под одинаковыми углами, нижний зубец 135 вращается по часовой стрелке, а верхний зубец 134 одновременно вращается против часовой стрелки, тем самым осуществляя взятие эффектора 133 (см. ФИГ. 2). В стационарном положении третьего вращающегося вала 175, когда первый вращающийся вал 173 вращается по часовой стрелке, а второй вращающийся вал 174 одновременно вращается против часовой стрелки под одинаковыми углами, то есть когда первый вращающийся элемент 151 вращается по часовой стрелке, а второй вращающийся элемент 152 одновременно вращается против часовой стрелки под одинаковыми углами, нижний зубец 135 вращается против часовой стрелки, а верхний зубец 134 одновременно вращается по часовой стрелке, тем самым ослабляя взятие эффектора 133.
[51] Третий вращающийся элемент 153 выполнен с возможностью вращения вокруг третьей центральной оси A3 третьего вращающегося элемента 153 для выполнения, посредством первого передаточного узла и второго передаточного узла: втягивания по меньшей мере одного троса из первого троса 141 и второго троса 142, при этом выпуская по меньшей мере один трос из третьего троса 143 и четвертого троса 144; или втягивания по меньшей мере одного троса из третьего троса 143 и четвертого троса 144, при этом выпуская по меньшей мере один трос из первого троса 141 и второго троса 142, для обеспечения тангажа поворотного механизма 130. В варианте реализации первая центральна ось A1 параллельна второй центральной оси A2, а также параллельна третьей центральной оси A3.
[52] В настоящем варианте реализации во время вращения третьего вращающегося элемента 153 первый трос 141 и второй трос 142 могут втягиваться на одинаковую длину, а третий трос 143 и четвертый трос 144 одновременно могут выпускаться на одинаковую длину посредством первого передаточного узла и второго передаточного узла, а во время вращения третьего вращающегося элемента 153 общая длина части первого троса 141 и части второго троса 142, которые втянуты, равняется общей длине части третьего троса 143 и части четвертого троса 144, которые выпущены, тем самым обеспечивая тангаж поворотного механизма 130. В качестве альтернативы, во время вращения третьего вращающегося элемента 153 третий трос 143 и четвертый трос 144 могут втягиваться на одинаковую длину, а первый трос 141 и второй трос 142 одновременно могут выпускаться на одинаковую длину, а во время вращения третьего вращающегося элемента 153 общая длина части третьего троса 143 и части четвертого троса 144, которые втянуты, равняется общей длине части первого троса 141 и части второго троса 142, которые выпущены, тем самым обеспечивая тангаж поворотного механизма 130.
[53] В частности, когда первый вращающийся вал 173 и второй вращающийся вал 174 остаются в стационарном положении, а приводной мотор управляет третьим вращающимся валом 175 для приведения третьего вращающегося элемента 153 во вращение против часовой стрелки, первый передаточный трос 158 и второй передаточный трос 159 выпускаются на одинаковую длину, а третий передаточный трос 166 и четвертый передаточный трос 167 одновременно втягиваются на одинаковую длину. То есть первый трос 141 и второй трос 142 выпускаются на одинаковую длину, а третий трос 143 и четвертый трос 144 одновременно втягиваются на одинаковую длину, тем самым обеспечивая тангаж поворотного механизма 130 в одном направлении. Подобным образом, когда первый вращающийся вал 173 и второй вращающийся вал 174 остаются в стационарном положении, а приводной мотор управляет третьим вращающимся валом 175 для приведения третьего вращающегося элемента 153 во вращение по часовой стрелке, первый передаточный трос 158 и второй передаточный трос 159 втягиваются на одинаковую длину, а третий передаточный трос 166 и четвертый передаточный трос 167 одновременно выпускаются на одинаковую длину. То есть первый трос 141 и второй трос 142 втягиваются на одинаковую длину, а третий трос 143 и четвертый трос 144 одновременно выпускаются на одинаковую длину, тем самым обеспечивая тангаж поворотного механизма 130 в обратном направлении.
[54] В настоящем варианте реализации, поскольку вращение первого вращающегося элемента 151, второго вращающегося элемента 152 и третьего вращающегося элемента 153 передается на первый трос 141, второй трос 142, третий трос 143 и четвертый трос 144 посредством первого подвижного шкива 156, второго подвижного шкива 157, третьего подвижного шкива 164 и четвертого подвижного шкива 165, длина движения (длина втягивания или выпуска) первого троса 141, второго троса 142, третьего троса 143 и четвертого троса 144, соответственно, составляют половину длины движения первого передаточного троса 158, второго передаточного троса 159, третьего передаточного троса 166 и четвертого передаточного троса 167, что означает, что соотношение скорости на входе заднего передаточного устройства к скорости на выходе заднего передаточного устройства составляет 2:1. Таким образом, когда имеется возвратная разница в редукторе приводного мотора или когда имеется возвратная разница в месте соединения по меньшей мере одного вала из первого вращающегося вала 173, второго вращающегося вала 174 и третьего вращающегося вала 175 с соответствующими приводными моторами, воздействие возвратной разницы на поворотный механизм 130 на переднем конце уменьшается наполовину, так что точность движения поворотного механизма 130 может быть улучшена.
[55] В соответствии с вариантом реализации настоящего изобретения заднее передаточное устройств соединено с четырьмя приводными тросами поворотного механизма таким образом, что поворотный механизм функционирует согласованно с задним передаточным устройством для достижения поворотным механизмом тангажа, рыскания и взятия путем втягивания или выпуска приводных тросов (т.е. первого троса, второго троса, третьего троса и четвертого троса) на одинаковое расстояние, что предполагает простую конструкцию и точную передачу. Кроме того, угол вращения вращающегося элемента находится в линейной связи с углом тангажа, углом рыскания или углом взятия поворотного механизма, а, следовательно, выпуск и/или втягивание приводных тросов на одинаковое расстояние может быть достигнуто даже тогда, когда вышеуказанные углы поворотного механизма варьируются в пределах широкого диапазона.
[56] Если иное не определено, технические и научные термины, используемые в настоящем документе, имеют те же самые значения, которые в целом известны специалисту в области техники, к которой относится настоящее изобретение. Термины, используемые в настоящем документе, предназначены только для конкретных практических целей и не ограничивают настоящее изобретение. Такие термины, как «расположен/расположенный», упоминаемые в настоящем документе, могут означать или ту часть, которая прикреплена непосредственно к другой части, или ту часть, которая прикреплена к другой части посредством промежуточного элемента. Признаки варианта реализации, описанные в настоящем документе, могут быть применимы к другому варианту реализации отдельно или в комбинации с другими признаками, если только эти признаки не применяются в другом варианте реализации или не упомянуты иным образом.
[57] Настоящее изобретение было описано неограничивающими вариантами реализации, однако следует понимать, что описанные выше варианты реализации приведены исключительно в иллюстративных целях и не ограничивают настоящее изобретение объемом описанных вариантов реализации. Специалисту в данной области техники будет ясно, что в решение по настоящему изобретению может быть внесено намного больше вариаций и модификаций, и все они будут входить в объем формулы настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УБОРОЧНЫЙ КОМБАЙН С УСТРОЙСТВОМ ПРИЕМНОЙ КАМЕРЫ МОЛОТИЛКИ | 2014 |
|
RU2645224C2 |
| РЕЖУЩИЕ УСТРОЙСТВА | 2011 |
|
RU2471612C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2494854C2 |
| КОЛЕБЛЮЩИЙСЯ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2008 |
|
RU2386855C1 |
| ПОСУДОМОЕЧНАЯ МАШИНА | 2016 |
|
RU2665614C1 |
| ПОДЪЕМНАЯ СИСТЕМА ДЛЯ СВЕРХГЛУБОКОГО ВЕРТИКАЛЬНОГО СТВОЛА | 2019 |
|
RU2749285C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫДВИЖЕНИЯ И ВТЯГИВАНИЯ АНТЕННЫ РАДИОТЕЛЕФОНА | 1997 |
|
RU2193263C2 |
| Машина для взъерошивания края верха обувной заготовки | 1976 |
|
SU1223829A3 |
| ЧАСОВОЙ МЕХАНИЗМ ДЛЯ НАРУЧНЫХ ЧАСОВ | 2003 |
|
RU2310898C2 |
| ТЕРМОГЕНЕРАТОР | 2007 |
|
RU2355911C2 |
Группа изобретений относится к медицине. Заднее передаточное устройство для применения в медицинском устройстве хирургического робота, содержащее: первый, второй и третий вращающиеся элементы; первый передаточный узел, соединенный с первым тросом и вторым тросом, а также соединенный с первым вращающимся элементом и третьим вращающимся элементом; и второй передаточный узел, соединенный с третьим тросом и четвертым тросом, а также соединенный со вторым вращающимся элементом и третьим вращающимся элементом; при этом первый, второй и третий вращающиеся элементы выполнены с возможностью вращения для втягивания по меньшей мере одного из тросов, при этом первый передаточный узел содержит: первый подвижный шкив, соединенный с первым тросом, и второй подвижный шкив, соединенный со вторым тросом. Заднее передаточное устройство для применения в медицинском устройстве хирургического робота, содержащее: первый, второй вращающиеся элементы и третий вращающийся элемент, который представляет собой катушку; первый передаточный узел, соединенный с первым тросом и вторым тросом, а также соединенный с первым вращающимся элементом и третьим вращающимся элементом; и второй передаточный узел, соединенный с третьим тросом и четвертым тросом, а также соединенный со вторым вращающимся элементом и третьим вращающимся элементом. Хирургическое медицинское устройство для хирургического робота, содержащее заднее передаточное устройство. Технический результат заключается в достижении поворотным механизмом тангажа, рыскания и взятия путем втягивания или выпуска приводных тросов (т.е. первого троса, второго троса, третьего троса и четвертого троса) на одинаковое расстояние, что предполагает простую конструкцию и точную передачу. 3 н. и 13 з.п. ф-лы, 4 ил.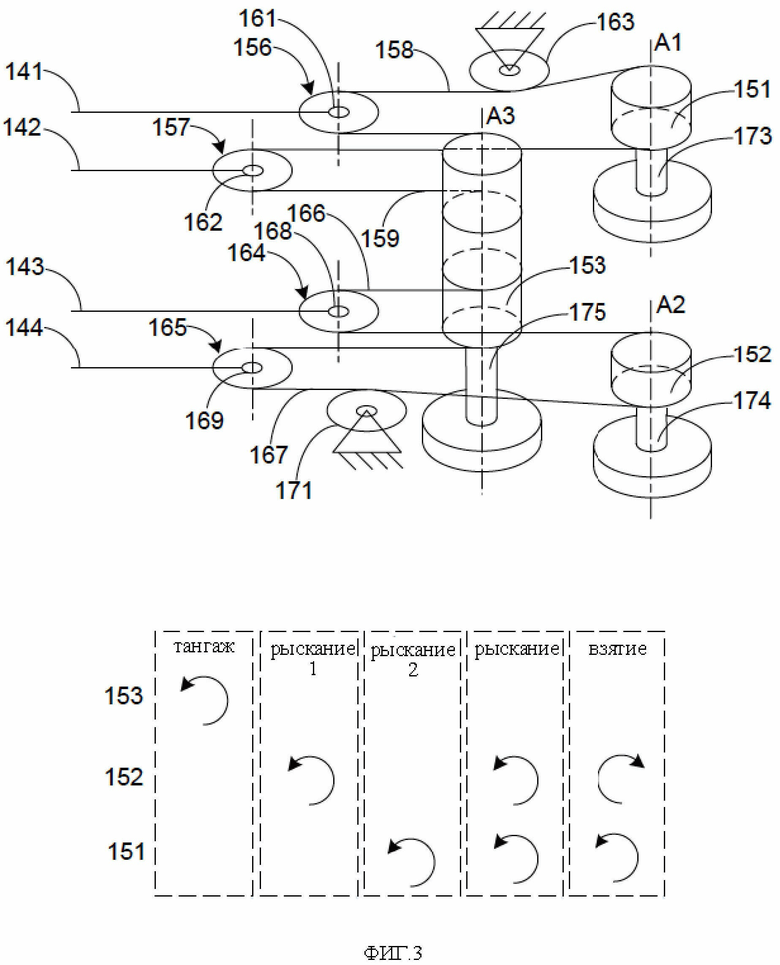
1. Заднее передаточное устройство для применения в медицинском устройстве хирургического робота, содержащее:
первый вращающийся элемент;
второй вращающийся элемент;
третий вращающийся элемент;
первый передаточный узел, соединенный с первым тросом и вторым тросом, а также соединенный с первым вращающимся элементом и третьим вращающимся элементом; и
второй передаточный узел, соединенный с третьим тросом и четвертым тросом, а также соединенный со вторым вращающимся элементом и третьим вращающимся элементом;
при этом первый вращающийся элемент выполнен с возможностью вращения для втягивания одного троса из первого троса и второго троса, а также для одновременного выпуска другого троса из первого троса и второго троса посредством первого передаточного узла;
второй вращающийся элемент выполнен с возможностью вращения для втягивания одного троса из третьего троса и четвертого троса, а также для одновременного выпуска другого троса из третьего троса и четвертого троса посредством второго передаточного узла; и
третий вращающийся элемент выполнен с возможностью вращения для выполнения посредством первого передаточного узла и второго передаточного узла
втягивания по меньшей мере одного троса из первого троса и второго троса, при этом выпуская по меньшей мере один трос из третьего троса и четвертого троса; или
втягивания по меньшей мере одного троса из третьего троса и четвертого троса, при этом выпуская по меньшей мере один трос из первого троса и второго троса,
при этом первый передаточный узел содержит:
первый подвижный шкив, соединенный с первым тросом;
первый передаточный трос, охватывающий первый подвижный шкив, при этом один конец первого передаточного троса соединен с первым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом;
второй подвижный шкив, соединенный со вторым тросом; и
второй передаточный трос, охватывающий второй подвижный шкив, при этом один конец второго передаточного троса соединен с первым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом; причем
первый передаточный трос проходит вокруг первого вращающегося элемента в направлении, противоположном направлению, в котором второй передаточный трос проходит вокруг первого вращающегося элемента, а также первый передаточный трос проходит вокруг третьего вращающегося элемента в том же направлении, в котором второй передаточный трос проходит вокруг третьего вращающегося элемента; и
при вращении первого вращающегося элемента или третьего вращающегося элемента первый подвижный шкив приводится в движение первым передаточным тросом, а второй подвижный шкив приводится в движение вторым передаточным тросом.
2. Заднее передаточное устройство по п. 1, отличающееся тем, что первый вращающийся элемент выполнен с возможностью вращения вокруг первой центральной оси первого вращающегося элемента, второй вращающийся элемент выполнен с возможностью вращения вокруг второй центральной оси второго вращающегося элемента, а третий вращающийся элемент выполнен с возможностью вращения вокруг третьей центральной оси третьего вращающегося элемента; и
при этом первая центральная ось параллельна второй центральной оси и параллельна третьей центральной оси.
3. Заднее передаточное устройство по п. 1, отличающееся тем, что первый передаточный узел дополнительно содержит первый направляющий шкив, причем
часть первого передаточного троса, расположенная между первым вращающимся элементом и первым подвижным шкивом, охватывает первый направляющий шкив таким образом, что часть первого передаточного троса, расположенная между первым направляющим шкивом и первым подвижным шкивом, параллельна части первого передаточного троса, расположенной между первым подвижным шкивом и третьим вращающимся элементом.
4. Заднее передаточное устройство по п. 3, отличающееся тем, что часть второго передаточного троса, расположенная между первым вращающимся элементом и вторым подвижным шкивом, параллельна части второго передаточного троса, расположенной между вторым подвижным шкивом и третьим вращающимся элементом, а также параллельна части первого передаточного троса, расположенной между первым подвижным шкивом и третьим вращающимся элементом.
5. Заднее передаточное устройство по любому из пп. 1, 3, 4, отличающееся тем, что второй передаточный узел содержит:
третий подвижный шкив, соединенный с третьим тросом;
третий передаточный трос, охватывающий третий подвижный шкив, при этом один конец третьего передаточного троса соединен со вторым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом;
четвертый подвижный шкив, соединенный с четвертым тросом; и
четвертый передаточный трос, охватывающий четвертый подвижный шкив, при этом один конец четвертого передаточного троса соединен со вторым вращающимся элементом, а другой его конец соединен с третьим вращающимся элементом; причем
третий передаточный трос проходит вокруг второго вращающегося элемента в направлении, противоположном направлению, в котором четвертый передаточный трос проходит вокруг второго вращающегося элемента, а каждый трос из третьего передаточного троса и четвертого передаточного троса проходит вокруг третьего вращающегося элемента в направлении, противоположном направлению, в котором каждый трос из первого передаточного троса и второго передаточного троса проходит вокруг третьего вращающегося элемента; и
при вращении второго вращающегося элемента или третьего вращающегося элемента третий подвижный шкив приводится в движение третьим передаточным тросом, а четвертый подвижный шкив приводится в движение четвертым передаточным тросом.
6. Заднее передаточное устройство по п. 5, отличающееся тем, что
первый подвижный шкив соединен с возможностью поворота с первым седлом шкива посредством первого вала, при этом первое седло шкива соединено с первым тросом, и причем второй подвижный шкив соединен с возможностью поворота со вторым седлом шкива посредством второго вала, при этом второе седло шкива соединено со вторым тросом, причем первый вал параллелен второму валу и параллелен первой центральной оси; и/или
третий подвижный шкив соединен с возможностью поворота с третьим седлом шкива посредством третьего вала, при этом третье седло шкива соединено с третьим тросом, и причем четвертый подвижный шкив соединен с возможностью поворота с четвертым седлом шкива посредством четвертого вала, при этом четвертое седло шкива соединено с четвертым тросом, причем третий вал параллелен четвертому валу и параллелен первой центральной оси.
7. Заднее передаточное устройство по п. 5 или 6, отличающееся тем, что второй передаточный узел дополнительно содержит второй направляющий шкив, причем
часть четвертого передаточного троса, расположенная между вторым вращающимся элементом и четвертым подвижным шкивом, охватывает второй направляющий шкив таким образом, что часть четвертого передаточного троса, расположенная между вторым направляющим шкивом и четвертым подвижным шкивом, параллельна части четвертого передаточного троса, расположенной между четвертым подвижным шкивом и третьим вращающимся элементом.
8. Заднее передаточное устройство по п. 7, отличающееся тем, что часть третьего передаточного троса, расположенная между вторым вращающимся элементом и третьим подвижным шкивом, параллельна части третьего передаточного троса, расположенной между третьим подвижным шкивом и третьим вращающимся элементом, а также параллельна части четвертого передаточного троса, расположенной между четвертым подвижным шкивом и третьим вращающимся элементом.
9. Заднее передаточное устройство для применения в медицинском устройстве хирургического робота, содержащее:
первый вращающийся элемент;
второй вращающийся элемент;
третий вращающийся элемент, при этом третий вращающийся элемент представляет собой катушку;
первый передаточный узел, соединенный с первым тросом и вторым тросом, а также соединенный с первым вращающимся элементом и третьим вращающимся элементом; и
второй передаточный узел, соединенный с третьим тросом и четвертым тросом, а также соединенный со вторым вращающимся элементом и третьим вращающимся элементом;
при этом первый вращающийся элемент выполнен с возможностью вращения для втягивания одного троса из первого троса и второго троса, а также для одновременного выпуска другого троса из первого троса и второго троса посредством первого передаточного узла;
второй вращающийся элемент выполнен с возможностью вращения для втягивания одного троса из третьего троса и четвертого троса, а также для одновременного выпуска другого троса из третьего троса и четвертого троса посредством второго передаточного узла; и
третий вращающийся элемент выполнен с возможностью вращения для выполнения посредством первого передаточного узла и второго передаточного узла
втягивания по меньшей мере одного троса из первого троса и второго троса, при этом выпуская по меньшей мере один трос из третьего троса и четвертого троса на одинаковую длину; или
втягивания по меньшей мере одного троса из третьего троса и четвертого троса, при этом выпуская по меньшей мере один трос из первого троса и второго троса на одинаковую длину.
10. Заднее передаточное устройство по п. 9, отличающееся тем, что первый передаточный узел содержит первый передаточный трос, который проходит вокруг первого вращающегося элемента и далее проходит вокруг третьего вращающегося элемента, при этом при вращении первого вращающегося элемента или третьего вращающегося элемента первый трос приводится в движение первым передаточным тросом.
11. Заднее передаточное устройство по п. 10, отличающееся тем, что первый передаточный узел дополнительно содержит второй передаточный трос, который проходит вокруг первого вращающегося элемента и далее проходит вокруг третьего вращающегося элемента, при этом при вращении первого вращающегося элемента или третьего вращающегося элемента второй трос приводится в движение вторым передаточным тросом.
12. Заднее передаточное устройство по п. 11, отличающееся тем, что первый передаточный трос проходит вокруг первого вращающегося элемента в направлении, противоположном направлению, в котором второй передаточный трос проходит вокруг первого вращающегося элемента, а также первый передаточный трос проходит вокруг третьего вращающегося элемента в том же направлении, в котором второй передаточный трос проходит вокруг третьего вращающегося элемента.
13. Заднее передаточное устройство по п. 11, отличающееся тем, что второй передаточный узел содержит третий передаточный трос, проходящий вокруг второго вращающегося элемента и дополнительно проходящий вокруг третьего вращающегося элемента, при вращении второго вращающегося элемента или третьего вращающегося элемента третий трос приводится в движение третьим передаточным тросом.
14. Заднее передаточное устройство по п. 13, отличающееся тем, что второй передаточный узел дополнительно содержит четвертый передаточный трос, проходящий вокруг второго вращающегося элемента и дополнительно проходящий вокруг третьего вращающегося элемента, при вращении второго вращающегося элемента или третьего вращающегося элемента четвертый трос приводится в движение четвертым передаточным тросом.
15. Заднее передаточное устройство по п. 14, отличающееся тем, что третий передаточный трос проходит вокруг второго вращающегося элемента в направлении, противоположном направлению, в котором четвертый передаточный трос проходит вокруг второго вращающегося элемента, а каждый трос из третьего передаточного троса и четвертого передаточного троса проходит вокруг третьего вращающегося элемента в направлении, противоположном направлению, в котором каждый трос из первого передаточного троса и второго передаточного троса проходит вокруг третьего вращающегося элемента.
16. Хирургическое медицинское устройство для хирургического робота, содержащее заднее передаточное устройство по любому из пп. 1-8 или 9-15.
| US 2010011900 A1, 21.01.2010 | |||
| US 2017105805 A1, 20.04.2017 | |||
| US 2019059986 A1, 28.02.2019 | |||
| US 2020000533 A1, 02.01.2020 | |||
| CN 105979889 A, 28.09.2016. |

