Область техники, к которой относится изобретение.
Группа изобретений относится к измерительной технике и может быть использована в оптическом приборостроении, прецизионной метрологии, точном машиностроении.
Автоколлиматоры (АК) широко используются в науке и технике для прецизионных угловых измерений благодаря отсутствию механического контакта, высокой точности и простой схемной реализации измерений [1].
Уровень техники.
Типичная схема двухкоординатного цифрового АК состоит из источника света, конденсора, марки, светоделителя, объектива, матричного фотоприемника и плоского зеркала, расположенного на контролируемом объекте. Плоскость марки совпадает с фокальной плоскостью объектива и сопряжена с плоскостью матричного приемника через зеркало и светоделитель. В качестве марки обычно используется круглая или крестообразная диафрагма, расположенная на оптической оси объектива. Пучок лучей от источника света, пройдя конденсор, освещает марку, проходит светоделитель и далее попадает на объектив АК. Пучок лучей, прошедший объектив, доходит до зеркала и, отразившись от него, повторно проходит объектив, светоделитель и попадает на фотоприемник, в плоскости которого формируется автоколлимационное изображение марки. При повороте контролируемого объекта автоколлимационное изображение марки меняет свое положение. Измерение углов поворота зеркала относительно координатных осей, перпендикулярных оптической оси объектива АК (коллимационных углов), осуществляется путем регистрации величины сдвига центра изображения марки в плоскости фотоприемника относительно центра изображения марки в отсутствие поворота зеркала.
Погрешности определений углов поворота объекта современными АК составляют от нескольких сотых до единиц угловой секунды [2, 3]. Основными источниками ошибок являются аберрации объектива и виньетирование обратно отраженного светового пучка, которые обуславливают зависимость предельного значения угловой погрешности от величины диапазона измеряемых углов и расстояния до отражателя. Обычно чем выше требуемая точность измерений, тем меньше диапазон определяемых углов и допустимое (рабочее) расстояние до зеркала.
При заданном диапазоне угловых измерений предельную рабочую дистанцию до отражателя ограничивает размер входной апертуры объектива АК. Предельная рабочая дистанция до зеркала в большинстве случаев не превышает нескольких метров. Использование специальных отражателей [4] в виде тройных зеркал с углами между зеркалами, немного отличающимися от 90°, или с неплоскими отражающими гранями позволяет увеличить рабочую дистанцию до отражателя и расширить диапазон угловых измерений. Однако недостатками использования таких отражателей являются снижение интенсивности анализируемого светового пучка в плоскости фотоприемника, высокие требования к взаимным углам установки и качеству отражающих поверхностей зеркал, заметное увеличение погрешности угловых измерений.
Известен способ определения углов поворота объекта, который реализуется при работе цифрового двухкоординатного АК, описанного в [5]. Оптическая схема данного АК типична для подобных устройств.
Способ выполняется в следующей последовательности операций. Направляют пучок излучения от источника излучения на марку и формируют автоколлимационное изображение марки в плоскости матричного фотоприемника АК путем отражения излучения от плоского зеркала Автоколлимационная марка представляет собой перекрестие прозрачных штрихов на непрозрачной пластине. Определяют координаты центра тяжести изображения перекрестия марки по взаимно перпендикулярным осям в соответствии с математическими выражениями, включающими расчет отношения сумм элементов матрицы яркостей отдельно по столбцам и строкам к общей сумме элементов матрицы яркостей по столбцам и строкам, т.е. координату по оси X и координату по оси Y, соответственно. Полученные значения сравнивают с таким же образом определяемыми координатами центра тяжести изображения перекрестия в отсутствие поворота зеркала. При установке зеркала на объекте по линейному смещению изображения перекрестия марки на матрице фотоприемника при повороте зеркала определяют углы поворота объекта (зеркала) с учетом размера пикселей матричного фотоприемника, фокусного расстояния объектива и калибровочного коэффициента, определяемого конструктивными параметрами объектива и фотоприемника.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относятся следующие.
Диапазоны измерений угла поворота зеркала, обеспечиваемые в [5], равны ±10' по оси X и ±7'по оси Y, при этом полная погрешность измерений в нормальных условиях в диапазоне измерений угла ±5' не более ±0б1''. Однако указанные значения можно реализовать лишь при малых рабочих расстояниях до контролируемого зеркала, соизмеримых с фокусным расстоянием объектива АК (500 мм). На больших расстояниях до контролируемого зеркала начнут проявляться аберрации объектива и виньетирование обратно отраженного светового пучка, которые будут неизбежно влиять на точность определения координат центра тяжести изображения перекрестия марки по взаимно перпендикулярным осям на матричном фотоприемнике. Кроме того, при значительном расстоянии до зеркала в плоскость фотоприемника может попасть лишь фрагмент изображения марки, идентифицировать и определить координаты центра тяжести изображения перекрестия марки в этом случае будет достаточно сложно, или вообще невозможно.
Известен двухкоординатный АК, описанный в [5], включающий последовательно расположенные по ходу луча источник излучения, в качестве которого используется светодиод, автоколлимационную марку, светоделитель, объектив, матричный фотоприемник и автоколлимационное зеркало, которое может быть установлено на объекте. Данный АК представляет собой отечественную разработку организаций «ЛОМО» и «Оптротех». Марка выполнена в виде перекрестия прозрачных штрихов на непрозрачной пластине. Марка и матричный фотоприемник установлены в фокальных сопряженных плоскостях объектива АК. Матричный фотоприемник, снабженный персональным компьютером (ПК), выполняет функции фотоприемного и измерительного узлов устройства. Программное обеспечение ПК позволяет вычислять угловые координаты центра тяжести изображения перекрестия марки и значения углов поворота зеркала по осям X, Y.
АК обеспечивает следующие значения точностных характеристик измерений углов поворота зеркала. Для фокусного расстояния объектива F=500 мм, диаметра выходного зрачка объектива 50 мм и размеров пикселя матричного фотоприемника 8,3×8,3 мкм диапазоны измерений угла поворота равны ±10' по оси X и ±7' по оси Y, при этом полная погрешность измерений в нормальных условиях в диапазоне измерений угла ±5' не более ±0,1''.
К причинам, препятствующим достижению указанного ниже технического результата, относятся следующие.
Достигаемые диапазоны измерений угла поворота зеркала с помощью известного АК реализуются лишь при малых рабочих расстояниях до контролируемого зеркала, соизмеримых с фокусным расстоянием объектива АК (500 мм). При увеличении расстояния до зеркала на точность определения координат центра тяжести изображения перекрестия марки по осям X, Y на матричном фотоприемнике будут оказывать влияние аберрации объектива и виньетирование обратно отраженного светового пучка. Структура используемой марки такова, что на значительных расстояниях до зеркала в плоскость фотоприемника может попасть небольшой фрагмент изображения марки. Идентификация и определение координат центра тяжести перекрестия марки в этом случае будут достаточно затруднительны или даже невозможны.
Известен способ определения углов поворота объекта, который реализуется при работе двухкоординатного цифрового АК, описанного в [6], принятый за прототип к заявляемому способу.
При выполнении способа - прототипа получают автоколлимационное изображение марки в плоскости матричного фотоприемника АК в результате отражения от плоского зеркала, размещенного на объекте. Излучение от источника направляют на марку АК через конденсор, формирующий параллельный пучок лучей, который проходит далее через марку, светоделитель, объектив, доходит до зеркала, отражается от него, повторно проходит объектив, светоделитель и попадает на матричный фотоприемник. В отсутствие поворота зеркала оптическая ось АК проходит через центр марки и через центр матричного фотоприемника.
Марку выбирают такой, что ее размер в несколько раз превосходит размер матричного фотоприемника, а сама марка имеет сложную нерегулярную структуру, элементы которой не повторяются. В зависимости от угла наклона зеркала относительно оптической оси АК на матричном фотоприемнике отображается некоторый фрагмент марки, который может быть точно идентифицирован.
После идентификации фрагмента изображения марки вычисляют координаты центральной точки изображения марки в плоскости матричного фотоприемника и угловое смещение центральной точки относительно оптической оси АК.
Поскольку размер марки в несколько раз превышает размер матричного фотоприемника, такой способ позволяет измерять углы поворота объекта (контролируемого зеркала) в диапазоне, также в несколько раз превышающем диапазон угловых измерений типичного АК.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относятся следующие.
В способе - прототипе при определении угла поворота зеркала вычисляют координаты центра изображения марки в плоскости матричного фотоприемника по идентифицированному фрагменту марки. Поскольку аберрации и виньетирование реального объектива АК приводят к конечным неравномерным искажениям различных частей изображения фрагмента марки, покрывающего всю площадь матричного фотоприемника, идентификация изображения фрагмента относительно всей марки неизбежно происходит с некоторой погрешностью. Особенно это проявляется при больших дальностях до объекта (здесь и далее под дальностью до объекта подразумевается расстояние от объектива АК до зеркала, установленного на объекте) и больших измеряемых углах поворота зеркала. Указанное обстоятельство приводит к значительным погрешностям вычисления координат центральной точки изображения марки в плоскости матричного фотоприемника, что влияет на точность определения ее углового смещения относительно оптической оси АК.
Известен двухкоординатный цифровой АК, описанный в [6] и принятый за прототип к заявляемому устройству. АК содержит расположенные на оптической оси источник излучения, в качестве которого используется светодиод, конденсор, марку, светоделитель (в качестве которого используется призма - куб со светоделительной гранью), объектив, плоское зеркало, установленное на объекте, и матричный фотоприемник, связанный с вычислительным блоком. Плоская марка и матричный фотоприемник расположены в фокальных сопряженных плоскостях объектива АК.
Марка АК в [6] имеет сложную нерегулярную структуру, а размер марки в несколько раз превосходит размер матричного фотоприемника. Каждый фрагмент марки уникален, отличается от остальных фрагментов и может содержать различные геометрические фигуры, концентрические кольца, спирали, узоры, расположенные в случайном порядке. Фрагменты марки могут иметь также разные коэффициенты пропускания.
Неповторимость фрагментов марки позволяет однозначно идентифицировать изображение регистрируемого на фотоприемнике фрагмента относительно марки в целом. Определив координаты центра фрагмента марки в плоскости фотоприемника, можно вычислить угловое смещение центра изображения марки относительно оптической оси АК.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного АК, принятого за прототип, относятся следующие.
Световые лучи от марки АК дважды проходя через реальный объектив автоколлиматора с конечными апертурой и аберрациями, строят автоколлимационное изображение марки в плоскости фотоприемника с неравномерными по полю искажениями, к тому же зависящими от дальности до зеркала и угла его разворота относительно оптической оси АК. Априори распределение искажений в изображении фрагмента марки неизвестно, что приводит к частичному «несовпадению» зеркального изображения фрагмента с исходным фрагментом в марке, а значит, к неточности определения положения исходного фрагмента относительно марки в целом. В результате будут возникать погрешности вычисления положения центральной точки изображения марки в координатах плоскости матричного фотоприемника, и, соответственно, точность определения ее углового смещения относительно оптической оси АК будет невысока.
Раскрытие сущности группы изобретений.
Сущность группы изобретений заключается в следующем.
Техническая проблема, которая возникает при определении двухкоординатных углов поворота объекта с помощью группы изобретений, включающей способ определения углов поворота объекта и двухкоординатный автоколлиматор для его осуществления, состоит в том, чтобы обеспечить определение углов с высокой точностью на больших дальностях до объекта с расширением диапазона определяемых углов.
Технический результат, который может быть достигнут при осуществлении заявленного изобретения - способа, заключается в определении углов поворота объекта с высокой точностью на больших дальностях до объекта с расширением диапазона определяемых углов.
Технический результат, который может быть достигнут при осуществлении заявленного изобретения - двухкоординатного автоколлиматора, заключается в определении углов поворота объекта с высокой точностью на больших дальностях до объекта с расширением диапазона определяемых углов.
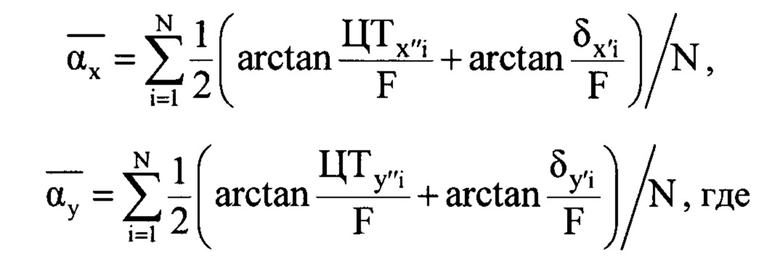
Указанный технический результат при осуществлении группы изобретений по объекту - способу достигается тем, что в способе определения углов поворота объекта, включающем направление параллельного пучка излучения на плоскую марку двухкоординатного автоколлиматора, элементы которой образуют сложную структуру, формирование автоколлимационного изображения марки в плоскости матричного фотоприемника двухкоординатного автоколлиматора путем прохождения излучения через объектив автоколлиматора, отражения излучения от плоского зеркала, закрепленного на объекте и расположенного на оси автоколлиматора в нулевом положении так, что нормальный вектор плоскости зеркала (X,0,Y) совпадает с направлением оптической оси автоколлиматора, обратного прохождения излучения через объектив автоколлиматора, при этом марка и матричный фотоприемник установлены в фокальных сопряженных плоскостях (X',О',Y') и (X'',О'',Y'') объектива автоколлиматора, соответственно, нормальные векторы которых совпадают с направлением оптической оси автоколлиматора, идентификацию изображений отдельных элементов марки, регистрируемых в плоскости матричного фотоприемника, определение углов поворота объекта, в соответствии с заявляемым техническим решением марку выбирают в виде двухмерного растра из прозрачных элементов на непрозрачной пластине, при этом характерные размеры прозрачных элементов марки и минимальное расстояние между ними превышают характерный размер пикселя матричного фотоприемника, а линейные размеры марки не превышают линейных размеров матричного фотоприемника, определяют координаты энергетических центров тяжести изображений N элементов марки, попавших в поле зрения объектива автоколлиматора и регистрируемых в плоскости матричного фотоприемника, относительно центра матричного фотоприемника, находят по полученным данным соответствующие сопряженные элементы на марке, усредненные по N значения угловых смещений  в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора, по формулам:
в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора, по формулам:
 - координаты энергетического центра тяжести изображения i-ro элемента марки относительно центра матричного фотоприемника;
- координаты энергетического центра тяжести изображения i-ro элемента марки относительно центра матричного фотоприемника;
 - координаты геометрического центра i-гo элемента марки относительно центра марки;
- координаты геометрического центра i-гo элемента марки относительно центра марки;
- F - фокусное расстояние объектива автоколлиматора,
определяют положение точки А на матричном фотоприемнике с координатами 
 выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А, и считают его базовым изображением с координатами энергетического центра тяжести
выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А, и считают его базовым изображением с координатами энергетического центра тяжести  находят сопряженный базовому изображению элемент на марке, который считают базовым элементом, координаты геометрического центра которого на марке относительно центра марки равны
находят сопряженный базовому изображению элемент на марке, который считают базовым элементом, координаты геометрического центра которого на марке относительно центра марки равны  значения углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора определяют по формулам:
значения углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора определяют по формулам:
Если параллельный пучок излучения направляют на марку через линзу-коллектив, установленную вплотную к марке, при этом фокусное расстояние линзы-коллектива равно фокусному расстоянию F объектива автоколлиматора, то возникает дополнительный технический результат, заключающийся в повышении точности определения углов поворота объекта в диапазоне определяемых углов.
Если марку выбирают из одинаковых прозрачных элементов, а шаг решетки растра монотонно дискретно уменьшают по ортогональным направлениям от центра марки к ее периферии, то возникает дополнительный технический результат, заключающийся в повышении точности определения углов поворота объекта в диапазоне определяемых углов.
Указанный технический результат при осуществлении группы изобретений по объекту - автоколлиматору достигается тем, что в двухкоординатном автоколлиматоре для определения углов поворота объекта, включающем последовательно установленные вдоль оптической оси автоколлиматора источник излучения, конденсор, плоскую марку, элементы которой образуют сложную структуру, призму - куб со светоделительной гранью, объектив, плоское зеркало, закрепленное на объекте, матричный фотоприемник, связанный с вычислительным блоком, при этом марка и матричный фотоприемник установлены в фокальных сопряженных плоскостях объектива автоколлиматора, в соответствии с заявляемым техническим решением марка выполнена в виде двухмерного растра из прозрачных элементов на непрозрачной пластине, при этом характерные размеры прозрачных элементов марки и минимальное расстояние между ними превышают характерный размер пикселя матричного фотоприемника, линейные размеры марки не превышают линейных размеров матричного фотоприемника, вычислительный блок выполнен в виде блока обработки изображения, формируемого матричным фотоприемником, с возможностью определения углов поворота объекта.
Если в двухкоординатном автоколлиматоре между конденсором и маркой вплотную к марке устанавливают линзу-коллектив, при этом фокусное расстояние линзы-коллектива равно фокусному расстоянию F объектива автоколлиматора, то возникает дополнительный технический результат, заключающийся в повышении точности определения углов поворота объекта автоколлиматором в диапазоне определяемых углов.
Если прозрачные элементы марки выполнены одинаковыми, а шаг решетки растра монотонно дискретно уменьшается по ортогональным направлениям от центра марки к ее периферии, то это характеризует вариант реализации автоколлиматора с упрощением изготовления марки и повышением точности определения углов поворота объекта в диапазоне определяемых углов.
Совокупность вышеизложенных признаков изобретения связана причинно-следственной связью с техническим результатом изобретения.
Как уже упоминалось, в известных технических решениях определение углов поворота объекта осуществляется путем измерения угловых смещений относительно оптической оси в двух взаимно перпендикулярных направлениях центра изображения марки в плоскости фотоприемника, регистрируемых при повороте зеркала, установленного на объекте. Положение центра изображения марки в отсутствие поворота зеркала находится при этом на оптической оси АК.
Отличительной особенностью заявляемого способа является использование для определения углов поворота объекта информации не о положении центра изображения марки на фотоприемнике, а координатной информации об N регистрируемых на фотоприемнике изображений элементов марки, попавших в поле зрения объектива АК при отражении от зеркала, которое может быть повернуто относительно оптической оси на значительный угол и может находиться на значительном удалении от объектива АК. По координатной информации об N изображениях элементов марки находят N соответствующих сопряженных элементов на марке. Это можно осуществить, к примеру, путем сопоставления взаимного положения элементов марки и их изображений.
Также отличительной особенностью заявляемого способа является осуществляемый определенным образом перечень следующих операций: выбор в пределах изображения марки на фотоприемнике базового изображения среди N регистрируемых изображений, нахождение базового элемента на марке, сопряженного базовому изображению, определение углов поворота зеркала в двух взаимно перпендикулярных направлениях исходя из полусуммы угловых смещений энергетического центра базового изображения и центра базового элемента в этих направлениях относительно оптической оси АК с учетом фокусного расстояния объектива.
В основе изложенного подхода лежит следующее обстоятельство. Нахождение базового элемента марки имеет целью определить такой элемент марки, световой пучок от которого после прохождения объектива падает на отражающую плоскость зеркала с минимальным отклонением от нормали к плоскости зеркала. При выполнении этого условия траектории пучка до и после зеркала в большой степени будут совпадать независимо от расстояния до зеркала. С учетом того, что типичные характерные размеры марки, как правило, во много раз меньше апертуры объектива, световой пучок в этом случае на трассе от марки до приемника будет дважды проходить практически через центр объектива с минимальными изломами траектории, а значит без виньетирования на апертуре объектива и с минимальными осесимметричными аберрационными искажениями. В результате изображение базового элемента в плоскости фотоприемника будет практически безаберрационным, т.е. очень близким к изображению, получающемуся при использовании в АК идеального широкоапертурного безаберрационного объектива. Базовый элемент марки определяется по положению на фотоприемнике базового изображения, которое в соответствии с заявляемым техническим решением выбирается определенным образом среди N регистрируемых на фотоприемнике изображений элементов марки. После определения базового изображения в плоскости приемника и идентификации базового элемента на марке координатная информация о паре базовое изображение/базовый элемент будет обеспечивать получение наиболее точных результатов определения углового положения зеркала.
Набор регистрируемых на фотоприемнике изображений элементов марки существенно зависит от структуры марки. В заявляемом техническом решении предлагается структура марки в виде двухмерного растра из прозрачных элементов на непрозрачной пластине, при этом характерные размеры прозрачных элементов марки и минимальное расстояние между ними превышают характерный размер пикселя матричного фотоприемника, а линейные размеры марки не превышают линейных размеров матричного фотоприемника. Такая структура марки позволяет даже на значительном удалении АК от зеркала обеспечить попадание значительной части световых лучей от источника излучения АК в плоскость фотоприемника при повороте зеркала, в том числе для больших углов поворота, и получить достаточное количество изображений элементов марки для идентификации элементов марки, попавших в поле зрения объектива АК и регистрируемых в плоскости матричного фотоприемника
Выбор базового изображения из регистрируемых на фотоприемнике изображений элементов марки осуществляют следующим образом. Определяют координаты N взаимно сопряженных изображений в плоскости матричного фотоприемника и элементов на марке относительно центра фотоприемника и центра марки, соответственно. Затем рассчитывают значения усредненных по N угловых смещений  в двух взаимно перпендикулярных направлениях по вводимым в заявляемом техническом решении формулам, учитывающим положения относительно оптической оси АК энергетических центров каждого из N изображений элементов на фотоприемнике и положения геометрических центров каждого из N элементов марки с учетом фокусного расстояния объектива АК. Далее находят точку А на матричном фотоприемнике, угловое положение которой определяется значениями угловых смещений
в двух взаимно перпендикулярных направлениях по вводимым в заявляемом техническом решении формулам, учитывающим положения относительно оптической оси АК энергетических центров каждого из N изображений элементов на фотоприемнике и положения геометрических центров каждого из N элементов марки с учетом фокусного расстояния объектива АК. Далее находят точку А на матричном фотоприемнике, угловое положение которой определяется значениями угловых смещений  и выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А. Это изображение и считают базовым изображением, а сопряженный ему элемент на марке считают базовым элементом марки.
и выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А. Это изображение и считают базовым изображением, а сопряженный ему элемент на марке считают базовым элементом марки.
Таким путем формируется пара базовое изображение/базовый элемент марки, использование координатной информации о которой для определения углового положения зеркала, как указывалось выше, будет обуславливать получение наиболее точных результатов в широком диапазоне значений определяемых углов, в том числе, на больших дальностях до объекта.
Краткое описание чертежей.
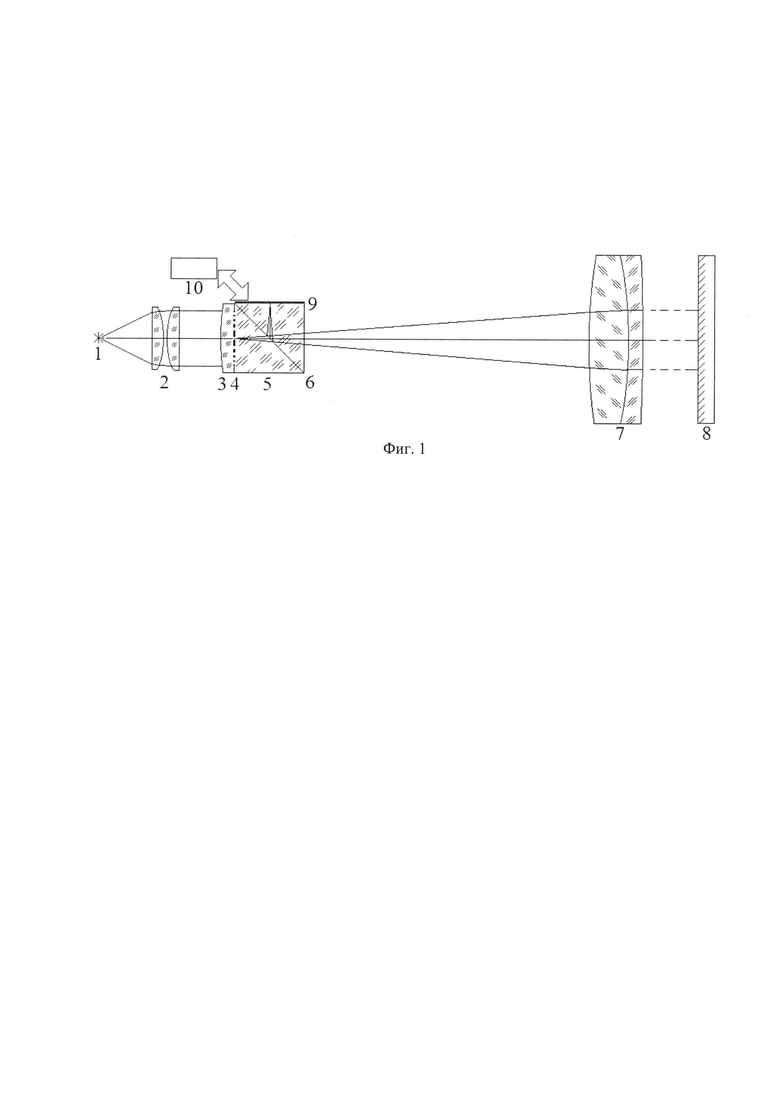
На фиг. 1 представлена блок-схема двухкоординатного автоколлиматора по п. 5 формулы изобретения, где 1 - источник излучения, 2 - конденсор, 3 - линза-коллектив, 4 - плоская марка, 5 - призма-куб со светоделительной гранью 6, 7 - объектив, 8 - плоское зеркало, закрепленное на объекте, 9 - матричный фотоприемник, 10 - блок обработки изображения, выполненный с возможностью определения углов поворота объекта. Марка 4 и матричный фотоприемник 9 установлены в фокальных сопряженных плоскостях объектива 7.
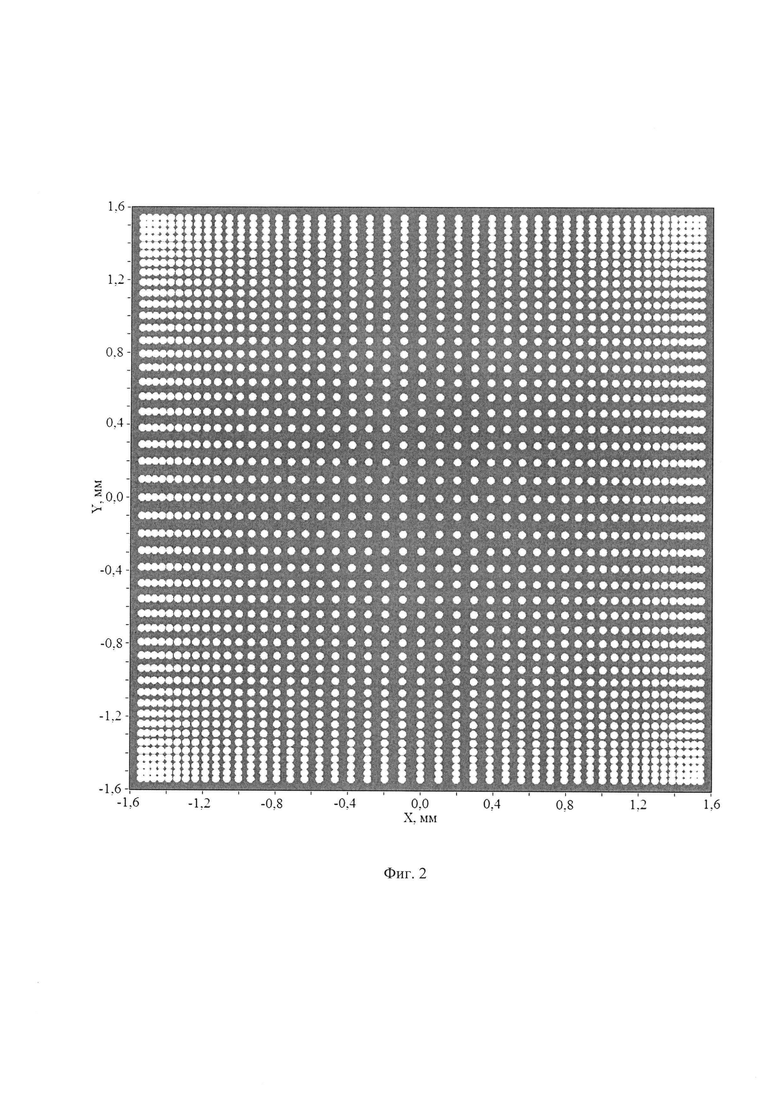
На фиг. 2 представлен пример формы марки по п. 6 формулы изобретения в виде двухмерного растра из одинаковых (круглых) прозрачных элементов с монотонным дискретным уменьшением шага решетки растра по ортогональным направлениям от центра марки к ее периферии.
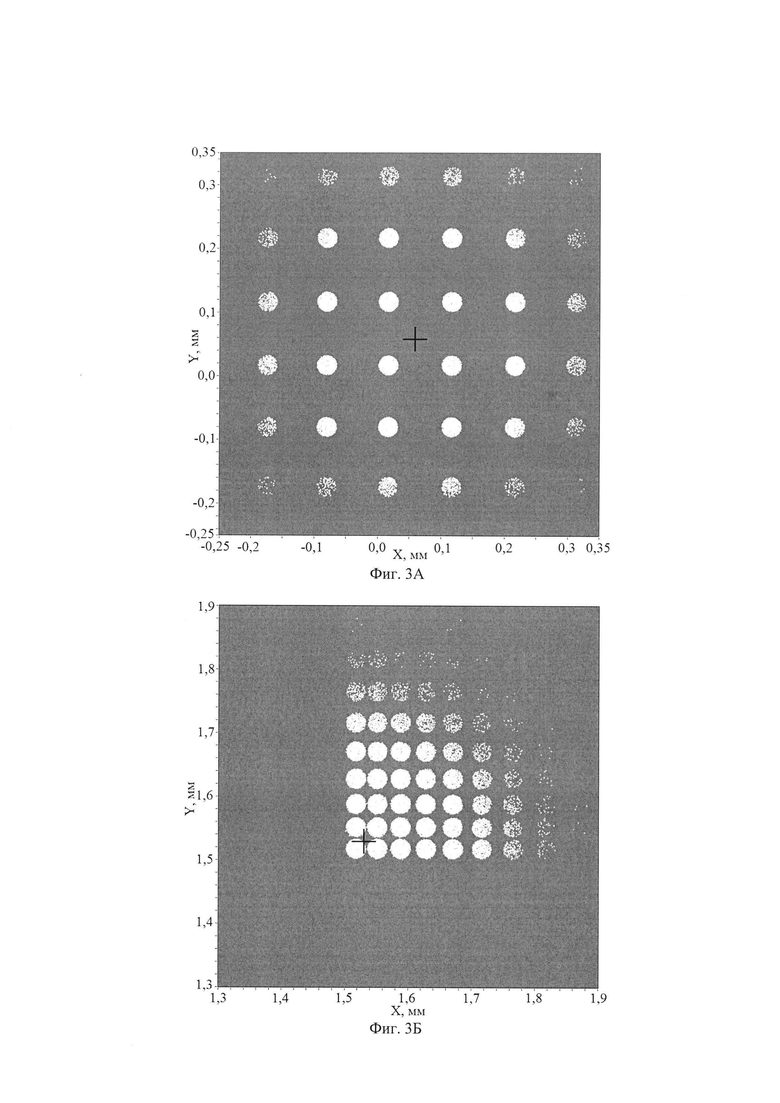
На фиг. 3А и 3Б представлен вид изображений элементов марки на матричном фотоприемнике, полученных по данным имитационного моделирования, при расстоянии L=30 м от объектива АК до зеркала диаметром D=265 мм и углах поворота зеркала ϕх=ϕу=24'' (фиг. 3А) и ϕх=ϕу=10,5' (фиг. 3Б), соответственно.
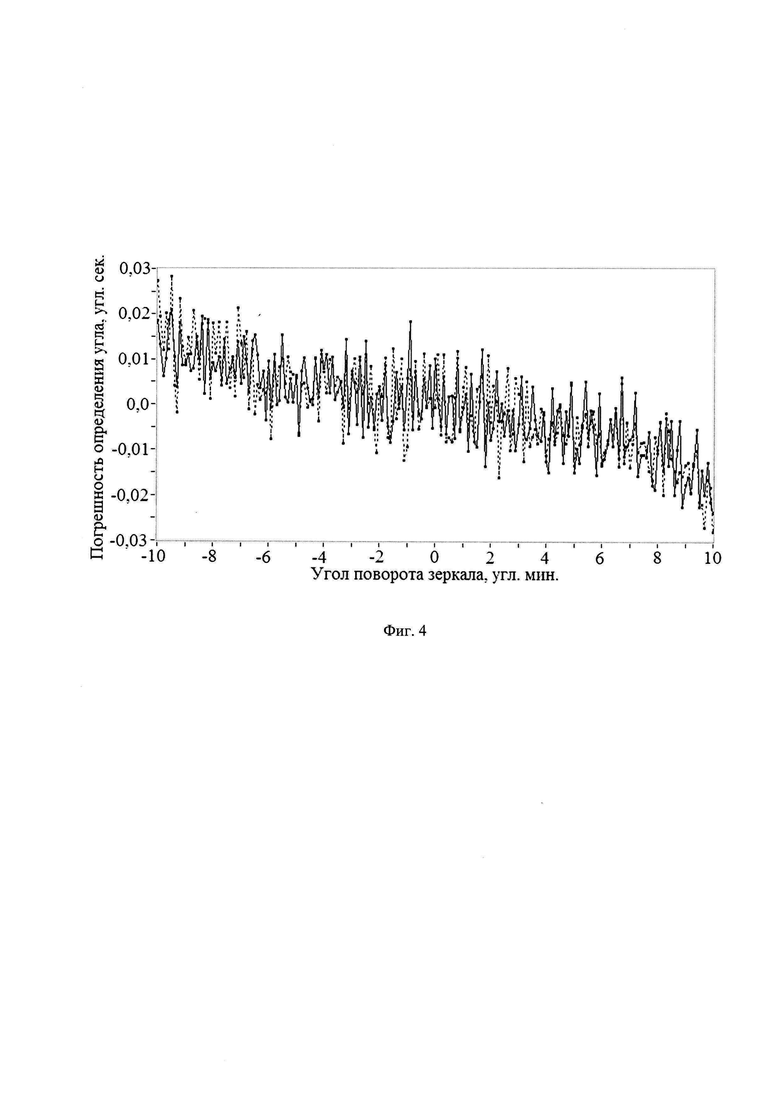
На фиг. 4 представлены погрешности определения углов ϕх (точки со сплошной интерполяцией) и ϕу (точки с пунктирной интерполяцией) автоколлиматором с многоэлементной маркой при повороте зеркала диаметром D=265 мм синхронно по двум координатам ϕх=ϕу и расстоянии L от объектива АК до зеркала 30 м.
Осуществление группы изобретений.
Перечень операций заявляемого способа реализуется при работе заявляемого двухкоординатного автоколлиматора, блок-схема которого представлена на Фиг. 1. Заявляемое устройство работает следующим образом.
Световой пучок от источника излучения 1 проходит через конденсор 2, линзу-коллектив 3, плоскую марку 4, призму-куб 5 со светоделительной гранью 6, объектив 7 и поступает на плоское зеркало 8, закрепленное на объекте. В фокальных сопряженных плоскостях объектива 7 установлены марка 4 и матричный фотоприемник 9. В плоскости матричного фотоприемника 9 формируется автоколлимационное изображение марки 4.
В общем случае марка 4 выполнена в виде двухмерного растра из прозрачных элементов на непрозрачной пластине, при этом характерные размеры прозрачных элементов марки и минимальное расстояние между ними превышают характерный размер пикселя матричного фотоприемника, а линейные размеры марки не превышают линейных размеров матричного фотоприемника.
При использовании указанной многоэлементной марки может возникать небольшое различие условий прохождения лучей от центральных и периферийных прозрачных элементов марки через центр объектива. Для выравнивания этих условий многоэлементную марку в заявляемом техническом решении засвечивают через линзу-коллектив 3, установленную вплотную к марке, с фокусным расстоянием, равным фокусному расстоянию объектива АК.
Марка по п. 6 формулы изобретения (фиг. 2), представляла собой двухмерный растр из одинаковых (круглых) прозрачных элементов с монотонным дискретным уменьшением шага решетки растра по ортогональным направлениям от центра марки к ее периферии. Марка имела следующие параметры: диаметр прозрачных элементов марки 30 мкм, максимальный шаг Т решетки растра 100 мкм, дискретность ДТ изменения шага решетки растра 3 мкм, общие размеры марки 3,112×3,112 мм, количество прозрачных элементов в марке 2209. Подобная марка может быть выполнена фотолитографическим способом [7] или способом лазерной абляции [8, 9].
Характерные виды изображений элементов указанной марки на матричном фотоприемнике, полученные по данным имитационного моделирования, представлены на фиг. 3А и 3Б. Эти изображения соответствуют двум значениям углов поворота зеркала АК ϕх=ϕу=24'' (фиг. 3А) и ϕх=ϕу=10,5' (фиг. 3Б), соответственно, при расстоянии L=30 м от объектива АК до зеркала. Как видно из фиг. 3А и фиг. 3Б, фрагменты изображения марки, попавшие в поле зрения объектива АК и регистрируемые в плоскости матричного фотоприемника, позволяют выбрать изображения отдельных элементов марки и определить координаты их энергетических центров тяжести относительно центра матричного фотоприемника. Так, на фиг. 3А можно гарантированно выбрать N=16 изображений, а на фиг. 3Б N=25 изображений, и для каждого изображения определить координаты энергетического центра тяжести ЦТя'' и ЦТу'' относительно центра матричного фотоприемника.
Путем сопоставления взаимного положения выбранных изображений элементов на фотоприемнике и элементов на марке находят соответствующие сопряженные элементы на марке с координатами их геометрических центров δХ' и δУ' относительно центра марки. К примеру, для марки, представленной на Фиг. 2, для идентификации изображения, регистрируемого в плоскости матричного фотоприемника, достаточно выбрать не менее двух пар соседних изображений элементов марки, последовательно расположенных по каждой координате.
Затем определяют значения угловых смещений  в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора, по формулам (1) и (2). Применительно к изображениям, приведенным на фиг. 3А и 3Б, усреднение осуществляется по N=16 и N=25, соответственно. Далее из отобранных изображений, регистрируемых в плоскости матричного фотоприемника, необходимо выбрать базовое изображение. Для этого рассчитывают значения
в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора, по формулам (1) и (2). Применительно к изображениям, приведенным на фиг. 3А и 3Б, усреднение осуществляется по N=16 и N=25, соответственно. Далее из отобранных изображений, регистрируемых в плоскости матричного фотоприемника, необходимо выбрать базовое изображение. Для этого рассчитывают значения  считая их координатами точки А на матричном фотоприемнике. На изображениях, приведенных на фиг. 3А и 3Б, точка А соответствует центру перекрестия. Выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А, и считают его базовым изображением с координатами энергетического центра тяжести
считая их координатами точки А на матричном фотоприемнике. На изображениях, приведенных на фиг. 3А и 3Б, точка А соответствует центру перекрестия. Выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А, и считают его базовым изображением с координатами энергетического центра тяжести  Применительно к изображениям, приведенным на фиг. 3А и 3Б, базовые изображения находятся ниже и левее точки А. Далее находят сопряженный базовому изображению элемент на марке, который считают базовым элементом, координаты геометрического центра которого на марке относительно центра марки равны
Применительно к изображениям, приведенным на фиг. 3А и 3Б, базовые изображения находятся ниже и левее точки А. Далее находят сопряженный базовому изображению элемент на марке, который считают базовым элементом, координаты геометрического центра которого на марке относительно центра марки равны 
Найденные значения координат базового изображения и сопряженного ему базового элемента на марке позволяют использовать их для точного определения углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора по формулам (3) и (4). Как указывалось выше, базовый элемент марки характеризуется тем, что световой пучок, прошедший его и далее объектив, падает на отражающую плоскость зеркала, закрепленного на объекте, с минимальным отклонением от нормали к плоскости зеркала, а траектории пучка до и после зеркала в большой степени совпадают независимо от расстояния до последнего. Световой пучок в этом случае на трассе от марки до фотоприемника будет дважды проходить практически через центр объектива с минимальными изломами траектории, а значит без виньетирования и с минимальными осесимметричными аберрационными искажениями. Поэтому результаты определения углового положения зеркала, или, что тоже самое, углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях с использованием координатной информации пары базовое изображение/базовый элемент по заявляемым в техническом решении формулам (3) и (4) будут наиболее точными.
Описанные выше операции по выбору пары базовое изображение/базовый элемент, расчеты угловых смещений  по формулам (1) и (2), углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях с использованием координатной информации пары базовое изображение/базовый элемент по формулам (3) и (4) осуществляются в АК в блоке обработки изображения 10. Блок обработки изображения 10 связан с матричным фотоприемником 9 и выполнен с возможностью определения углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях.
по формулам (1) и (2), углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях с использованием координатной информации пары базовое изображение/базовый элемент по формулам (3) и (4) осуществляются в АК в блоке обработки изображения 10. Блок обработки изображения 10 связан с матричным фотоприемником 9 и выполнен с возможностью определения углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях.
Для демонстрации возможностей заявляемых способа и АК для его реализации было осуществлено имитационное моделирование двухкоординатных угловых измерений, в процессе которых регистрировали изображения элементов марки, формируемых в плоскости матричного фотоприемника при повороте зеркала вокруг осей ОХ и OY на задаваемые углы ϕх и ϕу, являющиеся углами поворота объекта. В качестве объектива АК использовался линзовый дуплет дифракционного качества с фокусным расстоянием 501 мм и световой апертурой 51 мм. Марка размером 3,112×3,112 мм обеспечивала определение углов в максимальном диапазоне±10,5'. Расстояние L от объектива автоколлиматора до зеркала варьировалось от 1 до 30 м. Моделирование проводилось для двух диаметров D зеркала: 75 мм и 265 мм.
На фиг. 4 представлены погрешности определения углов ϕх (точки со сплошной интерполяцией) и ϕу (точки с пунктирной интерполяцией) автоколлиматором с многоэлементной маркой при повороте зеркала диаметром 265 мм в диапазоне ±10' синхронно по двум координатам (ϕх=ϕу) и расстоянии от объектива АК до зеркала 30 м. Под погрешностью определения углов ϕх и ϕу понимается разность между определяемыми и реальными значениями углов поворота.
Имитационное моделирование показывает, что при расстоянии до зеркала от 0 до 30 м погрешность определения углов ϕх и ϕу не превышает ±0,03'' при любых угловых положениях зеркала в диапазоне ±10'.
Использование линзы-коллектива, установленной между конденсором и маркой вплотную к марке, существенно сказывается на снижении погрешности измерений во всем диапазоне определения углов. Моделирование показывает, что при наличии линзы-коллектива погрешность постепенно снижается примерно на 0,015'' на границах диапазона определения углов при увеличении абсолютного значения определяемого угла.
Монотонное дискретное уменьшение шага решетки растра по ортогональным направлениям от центра марки к ее периферии повышает точность определения углов поворота объекта в диапазоне определяемых углов, т.к. способствует возрастанию числа N регистрируемых на фотоприемнике изображений элементов марки, попавших в поле зрения объектива АК при отражении от зеркала, более плотному расположению изображений базовых элементов при возрастании абсолютного значения определяемого угла и, следовательно, более точной локализации изображения базового элемента на фотоприемнике и базового элемента на марке. Наши оценки показали, что таким образом можно снизить погрешность определения углов на 0,04'' на границах диапазона определения углов по сравнению с вариантами марки, когда шаг решетки растра является одинаковым по всей решетке или изменяется в обратном направлении.
В таблице 1 представлены диапазоны точного определения углов ϕх и ϕу (с погрешностью не хуже 0,03'') на разных расстояниях L от объектива автоколлиматора до зеркала диаметром D=75 мм при использовании в автоколлиматоре линзы-коллектива и многоэлементной маркой с монотонным дискретным уменьшением шага решетки растра по ортогональным направлениям от центра марки к периферии. Диаметр зеркала, равный 75 мм, соответствует диаметру зеркала в комплектации унифицированных автоколлиматоров [10].
Приведенные результаты подтверждают основные достоинства и преимущества заявляемых способа и устройства. Выполнение операций способа позволяет определять двухкоординатные углы поворота объекта с высокой точностью на больших дальностях до объекта с расширением диапазона определяемых углов. Предлагаемое устройство для его осуществления - двухкоординатный автоколлиматор обеспечивает высокую точность определения углов поворота объекта на больших дальностях до объекта с расширением диапазона определяемых углов.
Литература
1. Высокоточные угловые измерения / Под ред. Ю.Г. Якушенкова, М.: Машиностроение, 1987. 480 с.
2. Унифицированный ряд цифровых двухкоординатных автоколлиматоров ОПТРО-АК [Электронный ресурс] // http://www.optrotech.ru/prod1-4.php (дата обращения: 15.02.2024).
3. Автоколлиматоры АК-025М, АК-025, АК-05 [Электронный ресурс] // http://intertech-Itd.соm/автоколлиматоры-ак-01-ак-025-и-ак-05 (дата обращения 15.02.2024).
4. Коняхин И.А. Панков Э.Д. Отражатель для трехкоординатных углоизмерительных устройств // Оптико-механическая промышленность, 1980, №3, с. 19-22.
5. Королев А.Н., Гарцуев А.И., Полищук Г.С., Трегуб В.П. Цифровой автоколлиматор // Оптический журнал, 2009, т. 76, №10, с. 42-47.
6. Franz S. Autokollimationsfernrohr mit Kamera // DE Patent 10 2009 012 508 В3, дата приоритета 11.03.2009, дата публикации 11.11.2010 (прототип).
7. Сейсян Р.П. Нанолитография в микроэлектронике (Обзор). Журнал технической физики, 2011, т. 81, вып.8, с. 1-14.
8. Абрамов Д.В., Хорьков К.С., Прокошев В.Г. Способ пробивки микроотверстий лазерным импульсным излучением. Патент РФ №2492036, дата приоритета 22.12.2011, дата публикации 10.09.2013.
9. Nakagawa K. et al., "Microdrilling technology using short pulsed-laser," Mitsubishi Heavy Industries Technical Review, 52, 3 (2015).
10. Автоколлиматоры унифицированные АКУ [Электронный ресурс] // https://npzoptics.ru/files/AKУ-02%20-05%20-l.pdf (дата обращения: 15.02.2024).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| Способ и устройство автоматической юстировки зеркальных телескопов | 2017 |
|
RU2690723C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ И ЛИНЕЙНЫХ КООРДИНАТ ОБЪЕКТА | 2013 |
|
RU2519512C1 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| ЦИФРОВОЙ ДВУХКООРДИНАТНЫЙ ДИНАМИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2008 |
|
RU2437058C2 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
Изобретение относится к измерительной технике и может быть использовано в оптическом приборостроении, прецизионной метрологии, точном машиностроении. Марку автоколлиматора выбирают в виде двухмерного растра из прозрачных элементов на непрозрачной пластине, при этом характерные размеры прозрачных элементов марки и минимальное расстояние между ними превышают характерный размер пикселя матричного фотоприемника, а линейные размеры марки не превышают линейных размеров матричного фотоприемника. Технический результат заключается в определении углов поворота объекта с высокой точностью с помощью двухкоординатного автоколлиматора на больших дальностях до объекта с расширением диапазона определяемых углов. 2 н. и 4 з.п. ф-лы, 4 ил., 1 табл.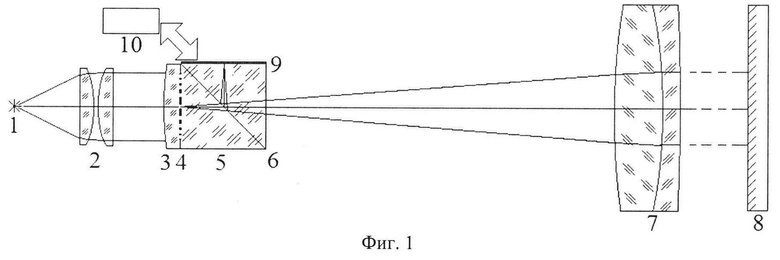
1. Способ определения углов поворота объекта, включающий направление параллельного пучка излучения на плоскую марку двухкоординатного автоколлиматора, элементы которой образуют сложную структуру, формирование автоколлимационного изображения марки в плоскости матричного фотоприемника двухкоординатного автоколлиматора путем прохождения излучения через объектив автоколлиматора, отражения излучения от плоского зеркала, закрепленного на объекте и расположенного на оси автоколлиматора в нулевом положении так, что нормальный вектор плоскости зеркала (X, O, Y) совпадает с направлением оптической оси автоколлиматора, обратного прохождения излучения через объектив автоколлиматора, при этом марка и матричный фотоприемник установлены в фокальных сопряженных плоскостях (X', O', Y') и (X'', O'', Y'') объектива автоколлиматора, соответственно, нормальные векторы которых совпадают с направлением оптической оси автоколлиматора, идентификацию изображений отдельных элементов марки, регистрируемых в плоскости матричного фотоприемника, определение углов поворота объекта, отличающийся тем, что марку выбирают в виде двухмерного растра из прозрачных элементов на непрозрачной пластине, при этом характерные размеры прозрачных элементов марки и минимальное расстояние между ними превышают характерный размер пикселя матричного фотоприемника, а линейные размеры марки не превышают линейных размеров матричного фотоприемника, определяют координаты энергетических центров тяжести изображений N элементов марки, попавших в поле зрения объектива автоколлиматора и регистрируемых в плоскости матричного фотоприемника, относительно центра матричного фотоприемника, находят по полученным данным соответствующие сопряженные элементы на марке, определяют усредненные по N значения угловых смещений  в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора, по формулам:
в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора, по формулам:
 - координаты энергетического центра тяжести изображения i-го элемента марки относительно центра матричного фотоприемника;
- координаты энергетического центра тяжести изображения i-го элемента марки относительно центра матричного фотоприемника;
 - координаты геометрического центра i-го элемента марки относительно центра марки;
- координаты геометрического центра i-го элемента марки относительно центра марки;
- F - фокусное расстояние объектива автоколлиматора,
определяют положение точки А на матричном фотоприемнике с координатами 
 выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А, и считают его базовым изображением с координатами энергетического центра тяжести
выбирают изображение элемента марки на матричном фотоприемнике, положение которого наиболее близко к точке А, и считают его базовым изображением с координатами энергетического центра тяжести  находят сопряженный базовому изображению элемент на марке, который считают базовым элементом, координаты геометрического центра которого на марке относительно центра марки равны
находят сопряженный базовому изображению элемент на марке, который считают базовым элементом, координаты геометрического центра которого на марке относительно центра марки равны  значения углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора определяют по формулам:
значения углов поворота объекта ϕх и ϕу в двух взаимно перпендикулярных направлениях относительно оптической оси автоколлиматора определяют по формулам:
2. Способ по п. 1, отличающийся тем, что параллельный пучок излучения направляют на марку через линзу-коллектив, установленную вплотную к марке, при этом фокусное расстояние линзы-коллектива равно фокусному расстоянию F объектива автоколлиматора.
3. Способ по любому из пп. 1, 2, отличающийся тем, что марку выбирают из одинаковых прозрачных элементов, а шаг решетки растра монотонно дискретно уменьшают по ортогональным направлениям от центра марки к ее периферии.
4. Двухкоординатный автоколлиматор для определения углов поворота объекта, включающий последовательно установленные вдоль оптической оси автоколлиматора источник излучения, конденсор, плоскую марку, элементы которой образуют сложную структуру, призму - куб со светоделительной гранью, объектив, плоское зеркало, закрепленное на объекте, матричный фотоприемник, связанный с вычислительным блоком, при этом марка и матричный фотоприемник установлены в фокальных сопряженных плоскостях объектива автоколлиматора, отличающийся тем, что марка выполнена в виде двухмерного растра из прозрачных элементов на непрозрачной пластине, при этом характерные размеры прозрачных элементов марки и минимальное расстояние между ними превышают характерный размер пикселя матричного фотоприемника, линейные размеры марки не превышают линейных размеров матричного фотоприемника, вычислительный блок выполнен в виде блока обработки изображения, формируемого матричным фотоприемником, с возможностью определения углов поворота объекта.
5. Двухкоординатный автоколлиматор по п. 4, отличающийся тем, что между конденсором и маркой вплотную к марке устанавливают линзу-коллектив, при этом фокусное расстояние линзы-коллектива равно фокусному расстоянию F объектива автоколлиматора.
6. Двухкоординатный автоколлиматор по любому из пп. 4, 5, отличающийся тем, что прозрачные элементы марки выполнены одинаковыми, а шаг решетки растра монотонно дискретно уменьшается по ортогональным направлениям от центра марки к ее периферии.
| CN 112393694 A, 23.02.2021 | |||
| EP 3001138 B1, 14.10.2020 | |||
| DE 102005018983 A1, 26.10.2006. |

