Изобретение относится к области измерительной техники, к измерительным устройствам, характеризующимся дистанционными оптическими средствами измерений, и может быть использовано при решении задач, требующих одновременного определения двух линейных и двух угловых координат объекта при постоянной дистанции до объекта (центровка составных валов, сборка крупногабаритных конструкций, слежение за положением объекта, наведение на объект).
Известны устройства, имеющие два двухкоординатных канала измерения - угловых и линейных координат, использующие один объектив, например, устройство для измерения угловых и линейных координат (Repot LLNL, UCRL-LR-105821-97-3, стр.187, фигура 10), включающее два измерительных канала. Первый канал измерения угловых координат объекта состоит из источника света, светоделителя, объектива, автоколлимационного зеркала с нанесенной на него рассеивающей маркой, и матричного приемника канала измерения угла. Второй канал измерения линейных координат объекта включает второе матричное фотоприемное устройство канала линейных измерений, расположенное в плоскости, сопряженной объективом с маркой.
Это устройство при достаточно высокой чувствительности, как к угловому, так и к линейному перемещению объекта, имеет ряд существенных недостатков. Это в первую очередь малый диапазон угловых измерений, который связан с диаметром входного зрачка объектива при больших расстояниях до объекта. При больших дистанциях до объекта диаметр входного зрачка объектива определяется уже не необходимым разрешением (определяемым относительным отверстием объектива), а требуемым диапазоном работы канала измерения угла, что при увеличении диапазона измерений приводит к увеличению габаритов высокоточных оптических элементов.
Другими недостатками устройства являются значительные габариты и сложность схемы, связанные с наличием двух раздельных каналов угловых и линейных измерений.
Известно устройство измерения угловых и линейных координат, выбранное нами в качестве прототипа (пат. RU №2366893, МПК G01B 11/26, приоритет 19.02.2008).
Устройство включает осветитель, расположенные по ходу луча светоделитель, объектив, размещенную на объекте марку и установленный в сопряженной с объектом плоскости матричный фотоприемник с блоком обработки информации, причем осветитель установлен в фокальной плоскости объектива, а марка выполнена в виде сегмента фокусирующего зеркала, расположенного на рефлексной поверхности, прифокусное расстояние сегмента фокусирующего зеркала не превышает глубины изображаемого пространства объектива.
Благодаря тому, что рефлексная поверхность марки возвращает значительную часть света по направлению осветителя, а фокусирующее зеркало большую часть лучей отражает так, что они не попадают в апертуру объектива, в изображении на матричном фотоприемнике образуется контур сегмента фокусирующего зеркала, положение которого относительно координат матрицы фотоприемника используется для расчета линейных координат объекта. Отраженный от поверхности сегмента фокусирующего зеркала свет, попадающий в апертуру объектива, дает изображение автоколлимационной точки.
Изображения контура зеркального сегмента и автоколлимационной точки зеркала, разнесенные по глубине, проецируются объективом в плоскость фотоприемника. Положение изображения автоколлимационной точки зеркала относительно контура фокусирующего зеркала используется для расчета угловых координат объекта. Условием малой погрешности измерения угла является соответствие фокусного расстояния зеркального сегмента глубине резко изображаемого пространства объектива.
Устройство имеет широкий диапазон измерения угловых координат, простую в изготовлении конструкцию и небольшие габариты пассивной марки, что позволяет размещать ее на малых объектах. Однако оно предназначено для работы с высокой точностью только на одной фиксированной дистанции, поскольку погрешность зависит от масштаба изображения марки (обратно пропорциональна размеру изображения) и глубины резко изображаемого пространства объектива.
Нами предложено одноканальное двухкоординатное устройство измерения угловых и линейных координат объекта, работающее в большом диапазоне дистанций с высокой точностью и изменяемым диапазоном измерений.
Такой технический результат достигнут нами, когда в устройстве измерения линейных и угловых координат объекта, содержащем осветитель, объектив с матричным фотоприемником, связанным с устройством обработки информации и установленным в плоскости, сопряженной с объектом, и измерительную марку, установленную на объекте, новым является то, что измерительная марка снабжена осветителем, включающим расположенные по ходу луча источник света, конденсор и рассеиватель, и двумя визирными элементами, образующими кольцевую и точечную структуры и разнесенными по оптической оси, за второй структурой по ходу луча установлен компенсатор оптического хода, при этом объектив выполнен с переменным фокусным расстоянием.
Подходы к конструированию визирных элементов кольцевой и точечной структуры и компенсаторов оптического хода известны.
На фигуре 1 изображена функциональная схема устройства, где осветитель марки с источником 1 света, конденсором 2, рассеивателем 3, кольцевая структура 4 марки, точечная структура 5 марки, компенсатор 6 оптического хода, объектив 7 с переменным фокусным расстоянием, матричное фотоприемное устройство 8, блок 9 обработки информации.
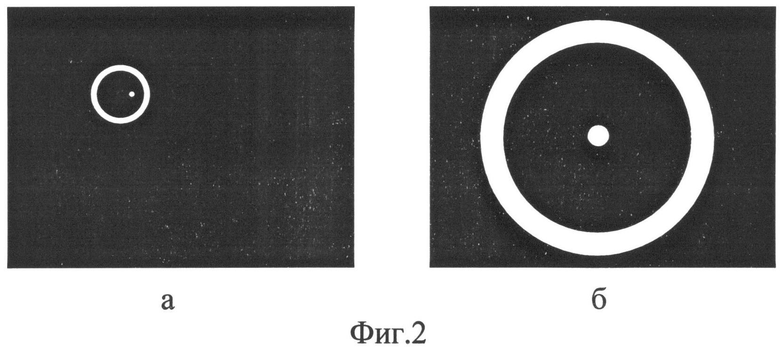
На фигуре 2 приведены изображения марки при определении линейных и угловых координат с малым увеличением «грубо» (а) и большим увеличением «точно» (б).
На фигуре 3 приведен пример конкретного исполнения, где осветитель марки с источником 1 света, конденсором 2, рассеивателем 3, кольцевая структура 4 марки, точечная структура 5 марки, компенсатор 6 оптического хода, объектив 7 с переменным фокусным расстоянием, матричное фотоприемное устройство 8, блок 9 обработки информации, призмы 10, 12, валы 11, 13. Устройства крепления призм и юстировки марки и приемной части не показаны.
На фигуре 4 приведены результаты измерения угловых перемещений объекта. На графике приведена зависимость измеренного угла в угл. мин. (по оси ординат) от заданного угла в угл. мин (по оси абсцисс).
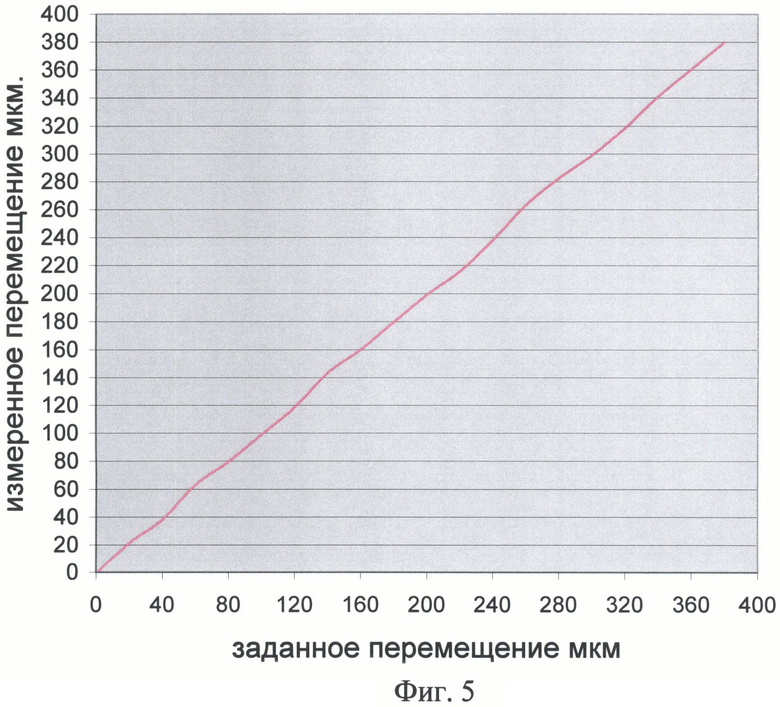
На фигуре 5 приведены результаты измерения линейных перемещений объекта. На графике приведена зависимость измеренного поперечного перемещения в мкм (по оси ординат) от заданного перемещения в мкм (по оси абсцисс).
Устройство работает следующим образом.
Марку устанавливают на объекте, объектив 7 с матричным фотоприемником 8 устанавливают соосно с маркой (объект и юстировочные приспособления не показаны) и фокусируют на визирные структуры марки. Источник света 1 через конденсор 2 и рассеиватель 3 подсвечивает кольцевую структуру 4 и точечную структуру 5, расположенный за точечной структурой 5 компенсатор 6 оптического хода между разнесенными по оси визирными структурами марки, приводит изображения структур марки 4 и 5 в единую плоскость изображения на фотоприемнике 8.
При измерении угла компенсатор 6 оптического хода кроме приведения изображения визирных структур в единую плоскость в данной конструкции с разнесенными по оси марками стал выполнять дополнительную функцию - повышения точности измерения угловой координаты за счет увеличения смещения изображения точечной структуры 5 относительно кольцевой структуры 4 при наклоне марки. Дополнительное смещение пропорционально углу и длине компенсатора.
При помощи объектива с переменным фокусным расстоянием 7 устанавливается максимально возможное увеличение изображения марки.
Толщина стекла (прозрачного материала) компенсатора 6 определяется по известной формуле как

где h - толщина компенсатора, мм;
L - расстояние по оси между визирными структурами, мм;
n - показатель преломления стекла на рабочей длине волны.
Благодаря тому, что структуры марки разнесены по оси, появляется возможность измерения относительных угловых координат марки, для чего используется определение положения центра изображения точечной структуры марки 5 относительно центра кольцевой структуры марки 4, изображенного на том же матричном фотоприемнике 8.
Изображение, полученное с фотоприемника 8 при разном увеличении объектива 7, приведено на фигуре 2.
Данные с фотоприемника 8 передаются в блок 9 обработки информации (ЭВМ).
Для измерения двух относительных линейных координат марки используется определение положения центра изображения кольцевой структуры марки 4 относительно координат матричного фотоприемника 8.
Поперечное смещение марки относительно координат матричного приемника определяется как

где Δм - смещение марки, мм;
Δи - смещение изображения кольцевой структуры 4 марки, мм;
D - диаметр кольцевой структуры 4 марки, мм;
Dи - диаметр изображении кольцевой структуры 4 марки, мм;
D/Dи - увеличение оптической системы.
Диаметр изображения кольцевой структуры 4 марки и положение ее центра относительно координат матрицы определяются по известным алгоритмам.
Относительные угловые координаты марки при малых углах определяются как 
где
φ - угловая координата, рад,
σ - смещение центра изображения точечной структуры 5 марки относительно центра кольцевой структуры 4 марки, мм,
D - диаметр кольцевой структуры 4 марки, мм,
Dи - диаметр изображений кольцевой структуры 4 марки, мм,
L - расстояние между визирными структурами марки, мм,
h - длина компенсатора, мм,
n - показатель преломления материала компенсатора.
Диаметр изображения кольцевой структуры 4 марки и положение ее центра, положение центра точечной структуры 5 марки определяются по известным алгоритмам.
Данные с фотоприемника 8 передаются в ЭМВ 9, где по формулам 2 и 3 определяются линейные и угловые относительные координаты марки.
Пример конкретного исполнения.
В качестве примера конкретного исполнения устройства приведено его использование в системе для измерения децентровки валов (см. фиг.3). Для измерения децентровки (несоосности) валов необходимо определить взаимный наклон и взаимное смещение осей валов по двум координатам. Методика измерения децентровки известна и включает установку на валы в районе соединительной муфты базирующих призм (призма, у которой ребро двухгранного угла параллельно оси цилиндрической образующей вала), на которые устанавливаются измерительные устройства. Методика включает синхронный поворот валов на четыре угла - 0, 90, 180, 270 угл. град, и измерение линейных и угловых смещений осей валов в этих положениях. Известны методы с синхронным поворотом валов на другие углы (минимум три), отличающиеся более сложными формулами расчета децентровки и меньшей точностью. Они применяются, когда невозможен поворот на 270 угл. град.
Марка с источником 1, конденсором 2, рассеивателем 3, кольцевой и точечной структурами 4, 5, прозрачным стержнем 6 установлена на одном валу 11 при помощи призмы 10. На другом валу 13 при помощи призмы 12 установлены объектив с переменным фокусным расстоянием 8 и матричный фотоприемник 9.
Диапазон измерения линейных смещений зависит от масштаба изображения кольцевой структуры 4 марки. Поэтому на первом этапе при больших начальных ошибках центровки валов выбирают такое увеличение объектива 7 с переменным фокусным расстоянием, чтобы при синхронном повороте валов на 360 угл. град, изображения структур марки оставались в поле зрения матричного фотоприемника 8. По координатам изображений кольцевой 4 и точечной структур 5 марки рассчитывают грубо относительные линейные и угловые смещения осей валов.
Затем грубые линейные и угловые смещения валов устраняют смещением подшипниковых узлов валов по известной методике.
После отработки грубого линейного и углового смещений, увеличение объектива 7 с переменным фокусным расстоянием изменяют до максимального возможного (так, чтобы изображение кольцевой структуры 4 марки занимало максимально возможную площадь фотоприемника 8), и с высокой точностью по той же методике определяют относительное линейное и угловое смещение фланцев валов.
После этого производят окончательную точную установку подшипниковых узлов валов по известной методике.
Таким образом, при помощи одного одноканального двухкоординатного устройства измерения угловых и линейных координат определяют параметры децентровки валов в большом диапазоне и в ограниченном диапазоне с высокой точностью. Устройство работает в большом диапазоне расстояний между центрируемыми валами.
В макете устройства в качестве осветителя 1 используется светодиод видимого диапазона спектра (длина волны 635 нм), телевизионный объектив V27Z9535M фирмы Computer, Япония, с переменным фокусным расстоянием 9,5-256 мм и световым диаметром 80 мм. Расстояние от объектива до марки составляет 400-5000 мм, диаметр кольцевой структуры 4 марки - 80 мм, расстояние между структурами марки - 50 мм.
В качестве фотоприемника использована цифровая камера с матрицей формата 6,4×5.2 мм типа VAC-135 производства фирмы ЭВС, Санкт-Петербург. Данные с матричного фотоприемника передают в ЭВМ типа Pentium-4 и обрабатывают при помощи известных корреляционных алгоритмов поиска диаметра и центра координат изображения кольцевой структуры 4 и центра координат изображения точечной структуры 5 относительно координат матричного фотоприемника 8. Затем полученные координаты изображения пересчитывают на относительные линейные и угловые координаты марки с использованием приведенных выше зависимостей 2 и 3.
На созданном макете были определены основные параметры устройства (диапазон работы, чувствительность к угловым и линейным перемещениям объекта). Для измерений использовался стенд, позволяющий с высокой точностью задавать линейные (1 мкм) и угловые (5 угл. сек) перемещения марки.
При точных измерениях (максимальном увеличении) погрешность в канале измерения угловых координат составляет не более 0,5 угл. мин, в канале измерения линейных координат - не более 15 мкм.
Таким образом, предложено дистанционное одноканальное двухкоординатное устройство измерения угловых и линейных координат при помощи марки с разнесенными по оси визирными структурами с компенсацией оптического хода между ними, обладающее большим диапазоном рабочих дистанций, высокой точностью и большим диапазоном измерения относительных линейных и угловых координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ И ЛИНЕЙНЫХ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2366893C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| ЭЛЕКТРОННЫЙ НИВЕЛИР | 2024 |
|
RU2834921C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2011 |
|
RU2467285C1 |



Изобретение относится к области измерительной техники, к измерительным устройствам, характеризующимся дистанционными оптическими средствами измерений, и может быть использовано при решении задач, требующих одновременного определения двух линейных и двух угловых координат объекта при постоянной дистанции до объекта.
Предложено одноканальное двухкоординатное устройство измерения угловых и линейных координат объекта, работающее в большом диапазоне дистанций с высокой точностью и изменяемым диапазоном измерений.
Такой технический результат достигнут нами, когда в устройстве измерения линейных и угловых координат объекта, содержащем осветитель, объектив с матричным фотоприемником, связанным с устройством обработки информации и установленным в плоскости, сопряженной с объектом, и измерительную марку, установленную на объекте, новым является то, что измерительная марка снабжена осветителем, включающим расположенные по ходу луча источник света, конденсор и рассеиватель, и двумя визирными элементами, образующими кольцевую и точечную структуры и разнесенными по оптической оси, за второй структурой по ходу луча установлен компенсатор оптического хода, при этом объектив выполнен с переменным фокусным расстоянием.
5 ил.
Устройство измерения линейных и угловых координат объекта, содержащее осветитель, объектив с матричным фотоприемником, связанным с устройством обработки информации и установленным в плоскости, сопряженной с объектом, и измерительную марку, установленную на объекте, отличающееся тем, что измерительная марка снабжена осветителем, включающим расположенные по ходу луча источник света, конденсор и рассеиватель, и двумя визирными элементами, образующими кольцевую и точечную структуры и разнесенными по оптической оси, за второй структурой по ходу луча установлен компенсатор оптического хода, при этом объектив выполнен с переменным фокусным расстоянием.
| US 2005225278 A1, 13.10.2005 | |||
| ЦЕЛЕВОЙ ЗНАК | 2002 |
|
RU2240505C2 |
| СПОСОБ ЦЕНТРОВКИ ОСЕЙ ВРАЩАЮЩИХСЯ СОПРЯГАЕМЫХ ВАЛОВ, ОБРАЗУЮЩИХ СОСТАВНОЙ ВАЛОПРОВОД, ОТНОСИТЕЛЬНО ОСИ ПРИВОДНОГО ВАЛА ТОРМОЗНОЙ МАШИНЫ МОТОРНОГО СТЕНДА И ОСИ КОЛЕНЧАТОГО ВАЛА ОБЪЕКТА ИССЛЕДОВАНИЙ - ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2352901C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ ДЕТАЛЕЙ | 2003 |
|
RU2245516C2 |
| US 2009103104 A1, 23.04.2009 | |||

