Заявляемое техническое решение относится к области электротехники, в частности, к таким устройствам, которые позволяют осуществлять бесконтактные пуски асинхронного двигателя (АД) с фазным ротором плавно - постепенно увеличивая частоту его ращения.
АД с фазным ротором широко применяются для приведения в действие различных механизмов, обычно обладающих большим пусковым моментом, таких как: компрессоры, транспортеры или крановое оборудование.
Известен «Асинхронный электродвигатель с фазным ротором» (патент РФ № RU47588U1, опубл. 27.08.2005, бюлл. № 24). Данное техническое решение является аналогом для заявляемого.
Оно содержит статор, внутри которого расположена трехфазная обмотка, а на подшипниках, установленных на подшипниковых щитах, размещен ротор. Выводы обмотки ротора соединены с контактными кольцами, вращающимися вместе с валом ротора. Узел контактных колец и щеткодержатели с щетками защищены кожухом, а снаружи статора расположена коробка выводов. Данное описание содержит еще ряд элементов.
Наличие в рассматриваемом техническом решении контактных колец и щеткодержателей с щетками является его недостатком. В процессе эксплуатации электродвигателя щетки истираются, и их приходится менять. Это удорожает техническое обслуживание подобной электрической машины. Кроме того, при недостаточно хорошем контакте с кольцами под щетками может возникать искрение. Это обстоятельство без дополнительных средств защиты не позволяет использовать такую машину в помещениях с взрыво- и(или) пожароопасной атмосферой.
Известен «Асинхронный электродвигатель с фазным ротором» (патент РФ № RU2751125C1, опубл. 08.07.2021, бюлл. № 19). Данное техническое решение также является аналогом для заявляемого.
Оно содержит статор, три фазные обмотки ротора, соединенные по схеме «звезда», три пары (т.е. 6 штук) встречно-параллельно включенных тиристоров, а также блоки управления ими. Все они располагаются на роторе АД, равно как и соединенные по схеме «звезда» три пусковых резистора. Описание рассматриваемого изобретения тоже содержит еще ряд технических признаков.
Недостатком данного устройства является его довольно сложная электрическая схема с немалым числом компонентов и, как следствие, далеко не простая в настройке. Одних только RC-цепочек, используемых в схемах управления тиристорами, в нем использовано 6 штук - по одной на каждый тиристор. Кроме того, по окончании пуска, т.е. в уже «установившемся» режиме работы для рассматриваемого устройства ротора АД характерны скачкообразные изменения электромагнитного момента. При его работе это вызывает вибрации, и потому снижает надежность эксплуатации как электродвигателя, так и механизма, который он приводит в движение.
В качестве прототипа для заявляемого технического решения использован «Асинхронный электродвигатель с фазным ротором» (патент РФ № RU 2773335 C1, опубл. 02.06.2022, бюлл. № 16).
Данное техническое решение содержит статор, первую, вторую и третью фазные обмотки ротора, первые выводы которых соединены по схеме «звезда». Расположенные на роторе оптрон, пусковой резистор, балластный резистор, первый, второй и третий диоды. Причем второй вывод первой фазной обмотки соединен с анодом первого диода. Второй вывод второй фазной обмотки соединен с анодом второго диода. Второй вывод третьей фазной обмотки соединен с анодом третьего диода. Катоды первого, второго и третьего диодов соединены с первым выводом пускового резистора. Его второй вывод соединен с общей точкой первых выводов фазных обмоток ротора. С нею также соединен первый вывод балластного резистора. Его второй вывод соединен с первым контактом источника света оптрона. Второй контакт источника света оптрона соединен с вторым выводом первой фазной обмотки ротора. В обсуждаемой схеме имеется еще ряд технических признаков.
Недостатком рассматриваемого изобретения является то, что оно не дает возможности сделать реализуемый бесконтактный пуск плавным, с постепенным повышением частоты вращения. Как известно, основное достоинство плавных пусков заключается в том, что они «берегут» механизм, приводимый в движение электродвигателем, снижая вероятность его отказа. Особенно хорошо плавные пуски сказываются на начальной стадии работы как самого электродвигателя, так и механизма, приводимого им в движение.
Технический результат, достигаемый заявляемым техническим решением, состоит в расширении функциональных возможностей устройства - прототипа, а именно, в обеспечении возможности бесконтактно осуществлять в процессе эксплуатации электродвигателя плавные пуски, постепенно повышая частоту его вращения.
Заявляемый технический результат достигается следующим образом.
В АД с фазным ротором, содержащем статор, первую, вторую и третью фазные обмотки ротора, первые выводы которых соединены по схеме «звезда», также расположенные на роторе оптрон, пусковой резистор, балластный резистор, первый, второй и третий диоды, причем второй вывод первой фазной обмотки соединен с анодом первого диода, второй вывод второй фазной обмотки соединен с анодом второго диода, второй вывод третьей фазной обмотки соединен с анодом третьего диода, катоды первого, второго и третьего диодов соединены с первым выводом пускового резистора, второй вывод которого соединен с общей точкой первых выводов фазных обмоток ротора, с которой также соединен первый вывод балластного резистора, второй вывод которого соединен с первым контактом источника света оптрона, второй контакт которого соединен с вторым выводом первой фазной обмотки ротора, дополнительно введены полностью управляемый полупроводниковый ключевой элемент, снабженный встречно-параллельным диодом, стягивающий резистор, микроконтроллер и модуль беспроводной связи, при этом с соответствующими контактами микроконтроллера соединены контакты модуля беспроводной связи, фотоприемника оптрона и затвор полностью управляемого полупроводникового ключевого элемента, коллектор которого соединен с общей точкой катодов первого, второго, третьего диодов и первого вывода пускового резистора, эмиттер соединен с общей точкой первых выводов первой, второй, третьей фазных обмоток ротора и второго вывода пускового резистора, а затвор соединен с выводом стягивающего резистора.
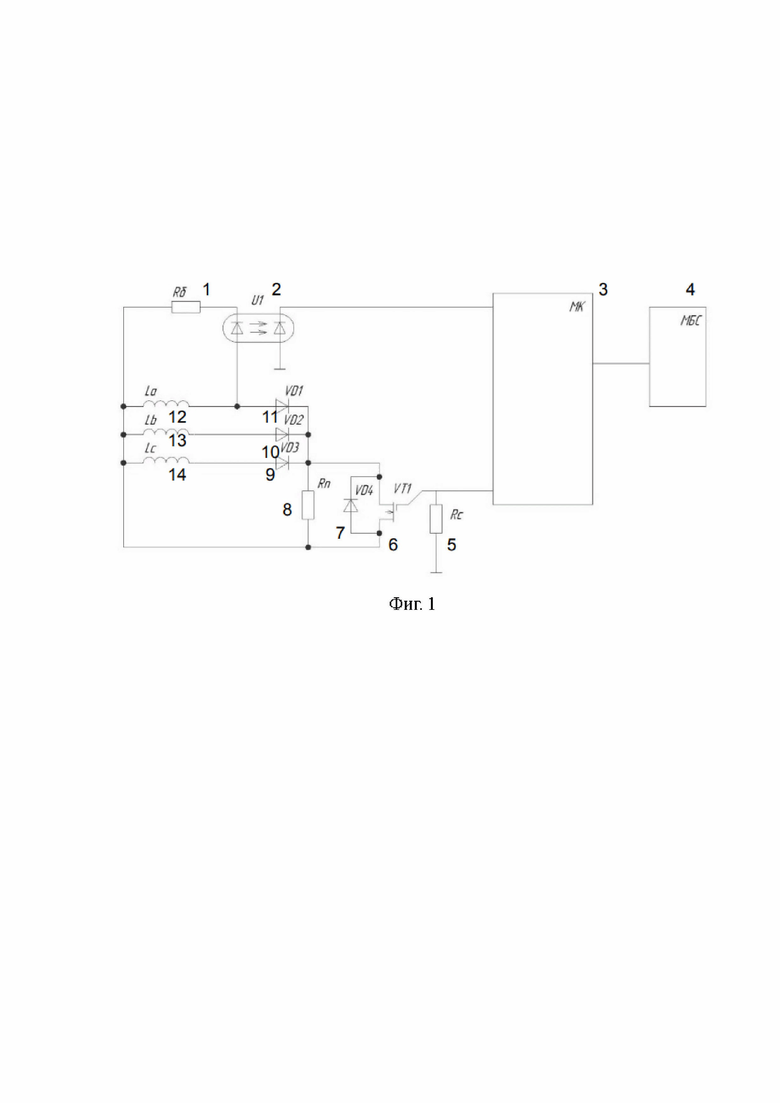
Пример выполнения заявляемого технического решения иллюстрируется на фиг. 1, где представлена принципиальная электрическая схема, реализуемая на роторе предлагаемого АД.
На фиг. 1 обозначены: 1 - балластный резистор Rб, 2 - оптрон с закрытым оптическим каналом U1, 3 - микроконтроллер МК, 4 - модуль беспроводной связи МБС, 5 - стягивающий резистор Rс, 6 - полностью управляемый полупроводниковый ключевой элемент VT1, 7 - встречно-параллельный диод VD4, 8 - пусковой резистор Rп, 9, 10 и 11 - соответственно, третий VD3, второй VD2 и первый VD1 диоды, 12, 13 и 14 - соответственно, первая La, вторая Lb и третья Lc фазные обмотки ротора.
Как уже отмечалось, все перечисленные элементы располагаются на роторе АД. Его статор имеет общеизвестную конструкцию. Связи между перечисленными элементами представлены на схеме, см. фиг. 1.
А именно, второй вывод первой фазной обмотки La, «12» соединен с анодом первого диода VD1, «11». Второй вывод второй фазной обмотки Lb, «13» соединен с анодом второго диода, VD2, «10». Второй вывод третьей фазной обмотки Lc, «14» соединен с анодом третьего диода, VD3, «9».
Катоды первого, VD1, «11», второго, VD2, «10» и третьего, VD3, «9» диодов соединены с первым выводом пускового резистора Rп, «8». Второй его вывод соединен с общей точкой первых выводов фазных обмоток ротора, La, «12», Lb, «13» и Lc, «14». С ней также соединен первый вывод балластного резистора, Rб «1». Второй его вывод соединен с первым контактом источника света оптрона U1, «2». Второй контакт источника света оптрона U1, «2» соединен с вторым выводом первой фазной обмотки ротора La, «12».
С соответствующими контактами микроконтроллера МК, «3» соединены контакты модуля беспроводной связи МБС, «4», фотоприемника оптрона U1, «2», и затвор полностью управляемого полупроводникового ключевого элемента VT1, «6». Его коллектор соединен с общей точкой катодов первого VD1, «11», второго VD2, «10», третьего VD3, «9» диодов и первого вывода пускового резистора, Rп, «8».
Эмиттер полностью управляемого полупроводникового ключевого элемента VT1, «6» соединен с общей точкой первых выводов первой La, «12», второй Lb, «13», третьей Lc, «14» фазных обмоток ротора и второго вывода пускового резистора Rп, «8». Его затвор соединен с выводом стягивающего резистора Rс, «5».
В качестве модуля беспроводной связи, МБС, «4» может быть применена соответствующая микросхема, широко используемая в современных смартфонах, планшетах и ноутбуках для передачи сигналов по Wi-Fi и(или) Bluetooth.
В качестве полностью управляемого полупроводникового ключевого элемента VT1 «6» может быть использован так называемый БТИЗ - биполярный транзистор с изолированным затвором (IBGT-транзистор).
Предлагаемое устройство работает следующим образом.
Прежде всего отметим: по умолчанию предполагается, что бесконтактное управление его работой будет осуществляться с использованием смартфона, планшета, ноутбука или какого-либо другого устройства, где подключен модуль беспроводной связи, аналогичный тому, который использован в заявляемом техническом решении (Wi-Fi, Bluetooth) и установлено соответствующее приложение (программное обеспечение).
При этом будет задействован модуль беспроводной связи, МБС, «4», см. фиг. 1. С его помощью лица, которые будут эксплуатировать предлагаемый АД, смогут активировать его пуски, в том числе плавные, и получать сведения о том, с какой частотой он вращается. Получив соответствующую команду или запрос, модуль беспроводной связи, МБС, «4» передаст эту информацию в микроконтроллер МК, «3», если необходимо, получит ответ и передаст его на смартфон (планшет или ноутбук) запрашивавшего.
В случае отсутствия связи с каким-либо из указанных выше устройств предлагаемое техническое решение сможет осуществлять только бесконтактные пуски АД. Будут ли они осуществляться «рывком» или плавно, это станет задано в ходе последнего по времени сеанса связи с подобным устройством на данную тему.
Выполняется этот пуск следующим образом. Подача питания к обмоткам статора электродвигателя приведет к появлению в обмотках его ротора La, «12», Lb, «13» и Lc, «14» наведенных ЭДС, имеющих в первый момент времени (пока ротор еще не тронулся с места) частоту, равную частоте сети.
Светодиод - источник света в оптроне U1, «2» начнет создавать однополупериодные сигналы, соответствующие положительным полуволнам напряжения первой обмотки ротора La, «12». Эти сигналы через фотоприемник оптрона U1, «2» будут поступать на соответствующий вход микроконтроллера МК «3», который будет измерять их продолжительность. Делать это можно, например, путем подсчета числа импульсов тактового генератора микроконтроллера МК «3», имеющих место за время наступления очередного однополупериодного сигнала.
Тем временем, токи, создаваемые фазными обмотками ротора La, «12», Lb, «13» и Lc, «14» будут замыкаться попеременно через первый, VD1, «11», второй, VD2, «10» или третий, VD3, «9» диоды, а также пусковой резистор Rп, «8». При этом АД будет работать на своей так называемой «искусственной» характеристике, определяемой, главным образом, величиной сопротивления пускового резистора Rп, «8» - подобно тому, как это имеет место, когда для уменьшения пусковых токов в фазные цепи АД с ротором «традиционной» конструкции (в котором используются щетки и контактные кольца) вводится дополнительное сопротивление пускового реостата.
Обычно в подобных случаях сопротивление пускового реостата подбирается таким образом, чтобы максимальный («критический») момент АД с фазным ротором приходился именно на этап его пуска, т.е. когда его частота вращения равна нулю, а скольжение, соответственно, составляет 100% (s=1,0). В предлагаемом техническом решении роль пускового реостата исполняет резистор Rп, «8», работающий, как уже отмечалось, попеременно с первым, VD1, «11», вторым, VD2, «10» и третьим, VD3, «9» диодами.
В случае, если создаваемый в АД электромагнитный момент будет больше момента сопротивления на его валу, электродвигатель тронется с места и начнет увеличивать свою частоту вращения.
По мере разворота АД будет уменьшаться и частота ЭДС, наводимой в фазных обмотках ротора, La, «12», Lb, «13» и Lc, «14». Следовательно, будет увеличиваться и продолжительность однополупериодных сигналов, создаваемых работой оптрона U1, «2».
Измеренная продолжительность очередного однополупериодного сигнала записывается микроконтроллером МК «3» в соответствующую ячейку памяти. Затем, после небольшого промежутка времени, замер продолжительности однополупериодного сигнала должен быть повторен. Если вновь полученное значение окажется больше предыдущего, значит пуск состоялся, и двигатель пошел в ход.
В противном случае, если вновь полученное значение не будет больше предыдущего, об этом следует проинформировать лицо, эксплуатирующее предлагаемый АД, в частности, через смартфон (ноутбук или планшет). Возможно, в двигателе произошел отказ, или же он оказался перегружен по моменту, например, если «заклинило» приводимый им в действие механизм.
Чтобы исполняемый пуск был плавным, электромагнитный момент, создаваемый в АД, следует на короткое время существенно уменьшить. С этой целью микроконтроллер МК, «3» должен подать отпирающее напряжение на затвор полностью управляемого полупроводникового ключевого элемента VT1, «6» (БТИЗ, IBGT-транзистора). Транзистор перейдет в проводящее («открытое») состояние и зашунтирует пусковой резистор Rп, «8». АД перейдет на работу по своей так называемой естественной механической характеристике. При пуске для нее характерен значительно меньший электромагнитный момент, чем это наблюдается у искусственной характеристики.
Как только отпирающее напряжение с затвора полностью управляемого полупроводникового ключевого элемента VT1, «6» (БТИЗ, IBGT-транзистора) будет снято, до этого поддерживавший проводящее («открытое») состояние транзистора заряд стечет через стягивающий резистор Rс, «5». Транзистор вновь закроется, а электродвигатель снова вернется к работе по искусственной характеристике.
Описанным способом - с соответствующей частотой открывая и закрывая транзистор VT1, «6», подобно тому, как это происходит в системах, реализующих широтно-импульсную модуляцию (ШИМ) - можно реализовать практически любую монотонно возрастающую кривую изменения во времени частоты вращения, предлагаемого АД.
При этом необходимо учитывать следующее обстоятельство. Дело в том, что естественная и искусственная механические характеристики у АД с фазным ротором пересекаются, по крайней мере, в одной точке.
Обозначим частоту вращения АД, соответствующую этой точке, как «w». При частотах вращения, меньших «w», электромагнитный момент, создаваемый в соответствии с естественной механической характеристикой, меньше такого же, но создаваемого в соответствии с искусственной характеристикой. При частотах вращения, больших «w», картина меняется на противоположную. Здесь электромагнитный момент, создаваемый в соответствии с естественной характеристикой, становится больше такого же, но создаваемого в соответствии с искусственной характеристикой.
Плавный пуск предлагаемого АД имеет смысл реализовывать только для частот вращения, не превышающих величины «w». Далее микроконтроллеру МК, «3» можно смело подавать отпирающее напряжение на затвор полностью управляемого полупроводникового ключевого элемента VT1, «6» (БТИЗ, IBGT-транзистора). Транзистор перейдет в свое проводящее («открытое») состояние и зашунтирует пусковой резистор Rп, «8». АД перейдет на работу по своей естественной механической характеристике, разгоняясь до такой частоты вращения, при которой развиваемый им электромагнитный момент окажется равным моменту сопротивления на его валу. Собственно, на этом плавный пуск АД с фазным ротором можно считать завершенным.
Представленное описание позволяет вполне однозначно утверждать, что реализация заявляемого технического решения несомненно обеспечивает получение запланированного технического результата.
За счет элементов и связей, введенных в устройство - прототип, в предлагаемом техническом решении обеспечена возможность осуществлять бесконтактным образом плавные пуски АД с фазным ротором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный двигатель с фазным ротором | 2021 |
|
RU2773335C1 |
| Регулятор частоты вращения асинхронного двигателя | 2022 |
|
RU2779636C1 |
| КОММУТАЦИОННОЕ УСТРОЙСТВО | 1997 |
|
RU2175166C2 |
| КОММУТАЦИОННОЕ УСТРОЙСТВО | 1996 |
|
RU2124806C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| КЛЮЧЕВОЙ КАСКОДНЫЙ УМНОЖИТЕЛЬ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА ВЫСОКОВОЛЬТНЫЙ ККУНПТВВ | 2007 |
|
RU2340082C1 |
| Активный фильтр высших гармоник трехфазной сети | 2024 |
|
RU2834682C1 |
| Устройство для пуска синхронного гистерезисного двигателя | 2017 |
|
RU2734691C2 |
| УМНОЖИТЕЛЬ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА УНПТ ВОРОБЬЕВА | 2005 |
|
RU2295822C2 |
| УСТРОЙСТВО ЗАЩИТЫ ПИРОПАТРОНА ОТ ЛОЖНОГО ЗАПУСКА ПРИ ИМПУЛЬСНЫХ ПЕРЕНАПРЯЖЕНИЯХ | 2007 |
|
RU2348093C2 |
Изобретение относится к области электротехники, в частности к асинхронному электродвигателю с фазным ротором. Технический результат – обеспечение возможности плавного бесконтактного пуска с постепенным повышением частоты вращения электродвигателя, бесконтактные пуски не только «рывком», но также плавно, постепенно повышая частоту его вращения. Асинхронный электродвигатель с фазным ротором содержит статор, первую, вторую и третью фазные обмотки ротора, первые выводы которых соединены по схеме «звезда». На роторе расположены оптрон, пусковой резистор, балластный резистор, первый, второй и третий диоды. Дополнительно введены полностью управляемый полупроводниковый ключевой элемент, снабжённый встречно-параллельным диодом, стягивающий резистор, микроконтроллер и модуль беспроводной связи. С соответствующими контактами микроконтроллера соединены контакты модуля беспроводной связи, фотоприёмника оптрона и затвор полностью управляемого полупроводникового ключевого элемента, коллектор которого соединён с общей точкой катодов первого, второго, третьего диодов и первого вывода пускового резистора, эмиттер соединён с общей точкой первых выводов первой, второй, третьей фазных обмоток ротора и второго вывода пускового резистора, а затвор соединён с выводом стягивающего резистора. 1 ил.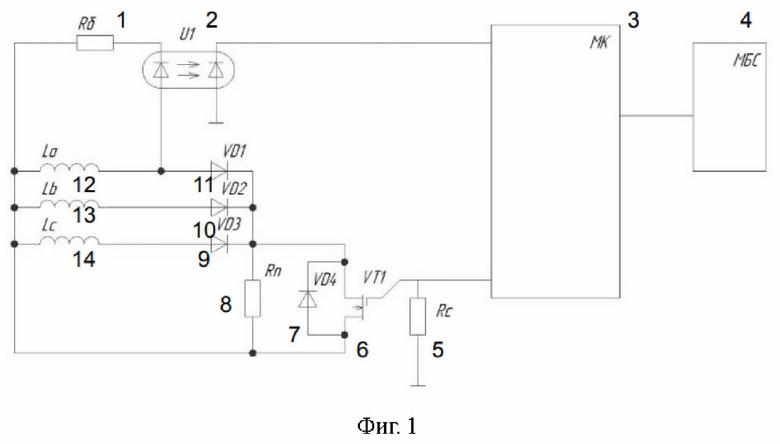
Асинхронный электродвигатель с фазным ротором, содержащий статор, первую, вторую и третью фазные обмотки ротора, первые выводы которых соединены по схеме «звезда», также расположенные на роторе оптрон, пусковой резистор, балластный резистор, первый, второй и третий диоды, причем второй вывод первой фазной обмотки соединен с анодом первого диода, второй вывод второй фазной обмотки соединен с анодом второго диода, второй вывод третьей фазной обмотки соединен с анодом третьего диода, катоды первого, второго и третьего диодов соединены с первым выводом пускового резистора, второй вывод которого соединён с общей точкой первых выводов фазных обмоток ротора, с которой также соединён первый вывод балластного резистора, второй вывод которого соединён с первым контактом источника света оптрона, второй контакт которого соединён с вторым выводом первой фазной обмотки ротора, отличающийся тем, что дополнительно введены полностью управляемый полупроводниковый ключевой элемент, снабжённый встречно-параллельным диодом, стягивающий резистор, микроконтроллер и модуль беспроводной связи, при этом с соответствующими контактами микроконтроллера соединены контакты модуля беспроводной связи, фотоприёмника оптрона и затвор полностью управляемого полупроводникового ключевого элемента, коллектор которого соединён с общей точкой катодов первого, второго, третьего диодов и первого вывода пускового резистора, эмиттер соединён с общей точкой первых выводов первой, второй, третьей фазных обмоток ротора и второго вывода пускового резистора, а затвор соединён с выводом стягивающего резистора.
| Асинхронный двигатель с фазным ротором | 2021 |
|
RU2773335C1 |
| Асинхронный двигатель с фазным ротором | 2020 |
|
RU2751125C1 |
| Гильзо-мундштучная машина | 1935 |
|
SU47588A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| US 4721898 A1, 26.01.1988. | |||

