Заявляемое техническое решение относится к области электротехники и может быть использовано в электроприводе для регулирования частоты вращения асинхронных двигателей, как с короткозамкнутым ротором, так и с фазным ротором.
Известны следующие технические решения - аналоги заявляемого:
- Регулирующее устройство для привода с асинхронным двигателем (патент RU 2222097 C2, опубл. 20.01.2004);
- устройство, реализующее Способ управления асинхронным двигателем (патент RU 2402865 C1, опубл. 27.10.2010);
- устройство, реализующее Способ частотного управления асинхронным электроприводом (патент RU 2626325 C1, опубл. 26.07.2017).
Общим недостатком указанных устройств-аналогов является достаточно сложная конструкция каждого из них. Соответственно, их массо-габаритные показатели оказываются соизмеримыми, если не более самого электродвигателя, которым они должны «управлять».
В качестве прототипа заявляемого технического решения было выбрано устройство, описанное в патент РФ на изобретение №2758441 «Регулятор частоты вращения асинхронного двигателя», опубл. 28.10.2021.
Оно содержит: переключатель, способный коммутировать не менее трех фаз, микроконтроллер, соединенный с соответствующими его контактами модуль беспроводной связи, также соединенные с соответствующими контактами микроконтроллера кнопки «Пуск» и «Стоп», первый и второй встречно-параллельно включенные тиристоры, которые введены в первую фазу, третий и четвертый встречно-параллельно включенные тиристоры, которые введены во вторую фазу, первый, второй, третий и четвертый оптроны.
При этом анод светодиода первого оптрона соединен с соответствующим контактом микроконтроллера. Первый электрод фотоприемника первого оптрона соединен с катодом первого тиристора. Второй электрод фотоприемника первого оптрона соединен с управляющим электродом первого тиристора.
Анод светодиода второго оптрона соединен с соответствующим контактом микроконтроллера. Первый электрод фотоприемника второго оптрона соединен с катодом второго тиристора. Второй электрод фотоприемника второго оптрона соединен с управляющим электродом второго тиристора.
Анод светодиода третьего оптрона соединен с соответствующим контактом первого микроконтроллера. Первый электрод фотоприемника третьего оптрона соединен с катодом третьего тиристора. Второй электрод фотоприемника третьего оптрона соединен с управляющим электродом третьего тиристора.
Анод светодиода четвертого оптрона соединен с соответствующим контактом микроконтроллера. Первый электрод фотоприемника четвертого оптрона соединен с катодом четвертого тиристора. Второй электрод фотоприемника четвертого оптрона соединен с управляющим электродом четвертого тиристора.
Недостатком данного устройства является наличие в нем ряда элементов, объединенных авторами под названием «датчик». В устройстве - прототипе датчик служит для получения информации относительно частоты вращения и температуры регулируемого асинхронного двигателя. По этой причине элементы, составляющие датчик (выше они упомянуты не были), приходится располагать в непосредственной близости от регулируемого электродвигателя, что несомненно усложняет монтаж устройства - прототипа, его последующую эксплуатацию, а также снижает надежность и живучесть установки в целом.
Задача, на решение которой направлено заявляемое решение, состоит в изменении конструкции устройства - прототипа таким образом, чтобы все элементы, обеспечивающие регулирование частоты вращения асинхронного двигателя оказались сосредоточены в одном объеме не слишком большого размера, так называемом блоке «пускателе». Такое техническое решение позволяет в ходе монтажа предлагаемого регулятора отказаться от работ по размещению элементов датчика в непосредственной близости от асинхронного двигателя и тем самым получить технический результат, заключающийся в уменьшении массо-габаритных показателей устройства.
Указанный технический результат возникает в регуляторе частоты вращения асинхронного двигателя содержащем переключатель, способный коммутировать не менее трех фаз, микроконтроллер, соединенный с соответствующими его контактами модуль беспроводной связи, соединенные также с соответствующими контактами микроконтроллера кнопки «Пуск» и «Стоп», первый и второй встречно-параллельно включенные тиристоры, которые введены в первую фазу, третий и четвертый встречно-параллельно включенные тиристоры, которые введены во вторую фазу, первый, второй, третий и четвертый оптроны.
При этом анод светодиода первого оптрона соединен с соответствующим контактом микроконтроллера. Первый электрод фотоприемника первого оптрона соединен с катодом первого тиристора. Второй электрод фотоприемника первого оптрона соединен с управляющим электродом первого тиристора.
Анод светодиода второго оптрона соединен с соответствующим контактом микроконтроллера. Первый электрод фотоприемника второго оптрона соединен с катодом второго тиристора. Второй электрод фотоприемника второго оптрона соединен с управляющим электродом второго тиристора.
Анод светодиода третьего оптрона соединен с соответствующим контактом микроконтроллера. Первый электрод фотоприемника третьего оптрона соединен с катодом третьего тиристора. Второй электрод фотоприемника третьего оптрона соединен с управляющим электродом третьего тиристора.
Анод светодиода четвертого оптрона соединен с соответствующим контактом микроконтроллера. Первый электрод фотоприемника четвертого оптрона соединен с катодом четвертого тиристора.
Второй электрод фотоприемника четвертого оптрона соединен с управляющим электродом четвертого тиристора.
В описываемое устройство введены пятый и шестой оптроны, кнопки увеличения и снижения частоты вращения асинхронного двигателя, которые соединены с соответствующими контактами микроконтроллера, трансформатор тока, первый, второй, третий, четвертый, пятый и шестой резисторы.
Причем первый контакт первого резистора соединен с первой фазой. Первый контакт второго резистора соединен со второй фазой. Первый контакт третьего резистора соединен с третьей фазой. Его второй контакт соединен с анодом светодиода пятого оптрона. Катод последнего, а также вторые контакты первого и второго резисторов соединены в общую точку, образуя схему «звезда». Первый электрод фотоприемника пятого оптрона соединен с четвертым резистором. Второй его электрод соединен с соответствующим контактом микроконтроллера.
В качестве первичной обмотки трансформатора тока использована третья фаза питания электродвигателя. Концы вторичной обмотки трансформатора тока соединены с контактами пятого резистора, а также анодом и катодом светодиода шестого оптрона. Первый электрод фотоприемника шестого оптрона соединен с шестым резистором. Второй его электрод соединен с соответствующим контактом микроконтроллера.
Более подробно заявляемое техническое решение раскрывается в приведенном ниже примере реализации и иллюстрируется на фиг.1, где представлена принципиальная электрическая схема предлагаемого регулятора частоты вращения асинхронного двигателя. Для упрощения схемы на фиг. 1 не показаны цепи питания микроконтроллера и модуля беспроводной связи.
Здесь представлены: асинхронный двигатель (1), состоящий из статора и ротора, трансформатор тока (2), пятый резистор (3), шестой резистор (4), шестой оптрон (5), модуль беспроводной связи (6), кнопки уменьшения (7) и увеличения (8) частоты вращения, а также «Пуск» (9) и «Стоп» (10), четвертый резистор (11), третий резистор (12), пятый оптрон (13), второй (14) и первый (15) резисторы, переключатель (16), первый (18) и второй (19) встречно-параллельно включенные тиристоры, которые введены в первую фазу; третий (22) и четвертый (23) встречно-параллельно включенные тиристоры, которые введены во вторую фазу; первый (17), второй (20), третий (21) и четвертый (24) оптроны, а также микроконтроллер (25).
С соответствующими контактами микроконтроллера (25) соединен модуль беспроводной связи (6). Кнопки уменьшения (7) и увеличения (8) частоты вращения асинхронного двигателя, а также «Пуск» (9) и «Стоп» (10) соединены с соответствующими контактами микроконтроллера (25). Первый (18) и второй (19) встречно-параллельно включенные тиристоры введены в первую фазу питания асинхронного двигателя (1), третий (22) и четвертый (23) встречно-параллельно включенные тиристоры введены во вторую фазу.
Анод светодиода первого оптрона (17) соединен с соответствующим контактом микроконтроллера (25). Первый электрод фотоприемника первого оптрона (17) соединен с катодом первого тиристора (18). Второй электрод фотоприемника первого оптрона (17) соединен с управляющим электродом первого тиристора (18).
Анод светодиода второго оптрона (20) соединен с соответствующим контактом микроконтроллера (25). Первый электрод фотоприемника второго оптрона (20) соединен с катодом второго тиристора (19). Второй электрод фотоприемника второго оптрона (20) соединен с управляющим электродом второго тиристора (19).
Анод светодиода третьего оптрона (21) соединен с соответствующим контактом микроконтроллера (25). Первый электрод фотоприемника третьего оптрона (21) соединен с катодом третьего тиристора (22). Второй электрод фотоприемника третьего оптрона (21) соединен с управляющим электродом третьего тиристора (22).
Анод светодиода четвертого оптрона (24) соединен с соответствующим контактом микроконтроллера (25). Первый электрод фотоприемника четвертого оптрона (24) соединен с катодом четвертого тиристора (23). Второй электрод фотоприемника четвертого оптрона (24) соединен с управляющим электродом четвертого тиристора (23).
Первый контакт первого резистора (15) соединен с первой фазой цепи питания асинхронного двигателя (1). Первый контакт второго резистора (14) соединен со второй фазой. Первый контакт третьего резистора (12) соединен с третьей фазой. Его второй контакт соединен с анодом светодиода пятого оптрона (13). Катод последнего, а также вторые контакты первого (15) и второго (14) резисторов соединены в общую точку, образуя схему «звезда». Первый электрод фотоприемника пятого оптрона (13) соединен с четвертым резистором (11). Второй его электрод соединен с соответствующим контактом микроконтроллера (25).
В качестве первичной обмотки трансформатора тока (2) использован провод третьей фазы цепи питания асинхронного двигателя (1). Концы вторичной обмотки трансформатора тока (2) соединены с контактами пятого резистора (3), а также анодом и катодом светодиода шестого оптрона (5). Первый электрод фотоприемника шестого оптрона (5) соединен с шестым резистором (4). Второй электрод фотоприемника шестого оптрона (5) соединен с соответствующим контактом микроконтроллера (25).
Как и в устройстве - прототипе в качестве модуля беспроводной связи (6) использована микросхема, реализующая передачу сигналов по WiFi и Bluetooth.
Схема, представленная на фиг. 1, работает следующим образом.
После замыкания контактов переключателя (16) на электронные компоненты регулятора подается питание. Микроконтроллер (25) будет готов осуществлять свои функции по завершении необходимых переходных процессов, что может занять некоторый промежуток времени, в пределах одной или нескольких секунд.
Запуск асинхронного двигателя (1) может быть осуществлен путем нажатия кнопки «Пуск» (9) либо по соответствующей команде оператора, переданной с помощью модуля беспроводной связи (6) со смартфона или какого-либо другого устройства, например, планшета или ноутбука, на котором установлено соответствующее программное обеспечение и подключен аналогичный модуль беспроводной связи.
С помощью тех же устройств (то есть, модуля беспроводной связи (6) и смартфона либо какого-то иного устройства, где установлено соответствующее программное обеспечение и подключен подобный модуль) также может быть осуществлена дистанционная остановка подключенного асинхронного двигателя.
Вручную асинхронный двигатель (1) может быть остановлен нажатием кнопки «Стоп» (10), что приведет к отключению микроконтроллером (25) светодиодов первого (17), второго (20), третьего (21) и четвертого (24) оптронов и последующему переходу первого (18), второго (19), третьего (22) и четвертого (23) тиристоров в не проводящее («закрытое») состояние, либо (в экстренных случаях) размыканием переключателя (16).
Дополнительным достоинством предлагаемого технического решения является возможность с его помощью реализовать функцию так называемого «плавного пуска», когда электродвигатель и соединенный с ним механизм стартуют не «рывком», а плавно набирая обороты. Реализация в установке данной функции положительно отражается на работоспособности подшипников как самого электродвигателя, так и соединенного с ним механизма.
С целью осуществления плавного пуска асинхронного двигателя (1) после получения соответствующей команды микроконтроллер (25) управляет питанием светодиодов первого (17), второго (20), третьего (21) и четвертого (24) оптронов следующим образом.
На светодиоды первого (17) и второго (20), а также третьего (21) и четвертого (24) оптронов микроконтроллером (25) питание начинает подаваться по переднему фронту сигнала, поступившего от пятого оптрона (13), попарно с задержками по времени от начала очередной положительной полуволны фазного напряжения третьей фазы, равными одной и двум третьим периода сетевого напряжения. При частоте питающей сети 50 Гц данные задержки составят: 1/50/3=0,0066(6) с и 1/50/3х2=0,0133(3) с, соответственно.
Делается это с той целью, чтобы первый (18) и второй (19), а также третий (22) и четвертый (23) тиристоры переходили в проводящее состояние («открывались») как можно ближе к тому моменту, когда соответствующие фазные напряжения (т.е. напряжения первой и второй фаз) будут менять свой знак на противоположный, иначе говоря, «переходить через ноль». Данное техническое решение имеет своей целью уменьшить возникновение высших гармонических составляющих тока, обусловленных коммутацией тиристоров.
Включившись, светодиоды вызовут переход в поводящее состояние («срабатыание») фотоприемников, размещенных вместе с каждым из них в едином корпусе соответствующего оптрона. В свою очередь, перешедшие в проводящее состояние фотоприемники соединят управляющие электроды первого (18), второго (19), третьего (22) и четвертого (23) тиристоров с их катодами. Указанные тиристоры также перейдут в проводящее состояние («откроются»), и по обмоткам асинхронного двигателя (1) потечет электрический ток. В двигателе возникнет электромагнитный момент.
По следующему переднему фронту сигнала, поступившего от пятого оптрона (13), питание со светодиодов первого (17), второго (20), третьего (21) и четвертого (24) оптронов будет снято. Это переведет соответствующие фотоприемники в не проводящее состояние.
Первый (18), второй (19), третий (22) и четвертый (23) тиристоры также перейдут в не проводящее состояние («отключатся»), как только протекающие по ним токи станут менее так называемых токов удержания этих тиристоров. При питающей частоте сети 50 Гц на это потребуется не более: 1/50=0,02°с. Таким образом, питание на асинхронный двигатель (1) будет подаваться в течение примерно одного периода сетевого напряжения (0,02 с).
Следующая подача питания на светодиоды первого (17), второго (20), третьего (21) и четвертого (24) оптронов должна произойти по истечении нескольких периодов сетевого напряжения. Пусть для примера в нашем случае таких периодов будет шесть. Наступление каждого из них будет фиксироваться микроконтроллером (25) по появлению соответствующего числа, т.е. 6 раз, переднего фронта сигнала от пятого оптрона (13). Всего при 50 Гц сетевого напряжения данный цикл займет:
(1+6) х (0,02 с)=0,14 с.
В следующем цикле первый (18), второй (19), третий (22) и четвертый (23) тиристоры должны будут находиться в проводящем («открытом») состоянии уже в течение двух периодов сетевого напряжения, то есть примерно 0,04 с при частоте сети 50 Гц.
В закрытом состоянии в данном цикле тиристоры должны будут находиться в течение времени, соответствующему числу периодов, на единицу меньшему, чем в предыдущий раз. В рассматриваемом примере таких периодов уже будет пять, а продолжительность всего цикла останется прежней, 0,14 с.
В следующем (третьем) цикле в нашем примере должно быть уже три периода открытого и четыре периода закрытого состояния первого (18), второго (19), третьего (22) и четвертого (23) тиристоров. Затем - четыре периода открытого и три периода закрытого их состояния и т.д. Наконец, после семи описанных итераций эти тиристоры должны стать открытыми уже в непрерывном режиме.
Процедура «плавного пуска» асинхронного двигателя (1) таким образом будет завершена. В рассмотренном примере для этого потребуется 49 периодов сетевого напряжения. При частоте сети 50 Гц она занимает чуть менее одной секунды. В зависимости от мощности электродвигателя, а также инерционности его ротора вместе с присоединенным к нему механизмом продолжительность выполнения данной процедуры может быть изменена как меньшую, так и большую сторону.
Сделать это можно также с помощью модуля беспроводной связи (6) со смартфона или какого-то другого устройства, где установлено соответствующее программное обеспечение и подключен аналогичный модуль.
После завершения процедуры «плавного пуска» асинхронного двигателя (1) микроконтроллер (25) переходит к выполнению следующего алгоритма - поддержания частоты вращения асинхронного двигателя (1) на заданном уровне и с установленной точностью.
С этой целью микроконтроллер (25) продолжит подавать питание на светодиоды первого (17), второго (20), третьего (21) и четвертого (24) оптронов. Они продолжат соединять управляющие электроды первого (18), второго (19), третьего (22) и четвертого (23) тиристоров с их катодами, поэтому каждый тиристор продолжит пребывать в проводящем («открытом») состоянии.
В обмотках асинхронного двигателя (1) продолжат протекать соответствующие токи, создавая на его валу электромагнитный момент.
Протекающий при этом по фазам питания асинхронного двигателя (1) электрический ток на данном этапе обычно называют пусковым. В третьей фазе он фиксируется трансформатором тока (2). Данный ток будет «отставать» от фазного напряжения той же фазы вследствие индуктивного характера нагрузки - асинхронного двигателя (1).
Величина напряжения, прикладываемого к светодиоду шестого оптрона (5), ограничивается номиналом пятого резистора (3). При каждом положительном полупериоде данный светодиод включается, открывая фотоприемник шестого оптрона (5). Тем самым на соответствующий контакт микроконтроллера (25) через шестой резистор (4) каждый раз будет подаваться логический ноль.
С другой стороны, сигнал, соответствующий фазному напряжению третьей фазы, создается совместной работой включенных по схеме «звезда» первого (15), второго (14) и третьего (12) резисторов. Они имеют одинаковые, достаточно большие номиналы и служат для получения в предлагаемом устройстве так называемой искусственной нулевой точки.
При каждом положительном полупериоде фазного напряжения третьей фазы светодиод пятого оптрона (13) будет включаться, открывая фотоприемник, размещенный в одном с ним корпусе оптрона. Таким образом на соответствующий контакт микроконтроллера (25) через четвертый резистор (11) каждый раз будет подаваться логический ноль.
Микроконтроллер (25) определяет промежутки времени между моментами поступления логических нулей со стороны фазного напряжения третьей фазы [третий резистор (12) ->пятый оптрон (13)] и со стороны фазного тока той же фазы [трансформатор тока (2) ->шестой оптрон (5)]. Таким образом в микроконтроллере (25) вычисляется интервал времени «ϕ» - разность фаз между напряжением, приложенным к асинхронному двигателю (1) и током, протекающем по одноименной с ним, третьей фазе.
Асинхронный двигатель (1) придет во вращение, если создаваемый в нем электромагнитный момент будет больше момента сопротивления на его валу. По мере его разгона и набора частоты вращения потребляемый из сети ток, как известно, будет снижаться. Одновременно будет уменьшаться и разность фаз ϕ между напряжением, приложенным к асинхронному двигателю (1) и током, по нему протекающему.
Минимальное значение указанной разности фаз ϕ будет примерно соответствовать номинальной частоте вращения регулируемого асинхронного двигателя (1).
Поэтому отслеживание данного параметра, т.е. ϕ, вполне допустимо использовать для регулирования частоты вращения асинхронного двигателя. С этой целью в памяти микроконтроллера (25) должно хранится значение ϕтр - разности фаз, соответствующей требуемой по условиям эксплуатации установки предельно допустимой частоте вращения асинхронного двигателя.
Пока вычисляемая микроконтроллером (25) разность фаз ϕ будет больше величины ϕтр, микроконтроллер (25) будет подавать питание на светодиоды первого (17), второго (20), третьего (21) и четвертого (24) оптронов.
В свою очередь, они через управляющие электроды первого (18), второго (19), третьего (22) и четвертого (23) тиристоров будут обеспечивать проводящее состояние этих полупроводниковых элементов.
Асинхронный двигатель (1) будет продолжать разгоняться, пока электромагнитный момент на его валу будет оставаться больше, чем момент сопротивления, создаваемый механизмом.
Когда электродвигатель наберет необходимые обороты и вычисленная микроконтроллером (25) разность фаз ϕ окажется меньше заданной величины ϕтр, микроконтроллер (25) обесточит светодиоды первого (17), второго (20), третьего (21) и четвертого (24) оптронов.
Их отключение вновь переведет соответствующие фотоприемники в не проводящее состояние. В результате чего первый (18), второй (19), третий (22) и четвертый (23) тиристоры также перейдут в не проводящее состояние, как только протекающие по ним токи станут менее токов удержания этих тиристоров. Как уже отмечалось, при питающей частоте сети 50 Гц на это потребуется не более 0,02 с.
Обесточенный электродвигатель (1) тем временем продолжит вращаться по инерции, постепенно снижая свои обороты («на выбеге»).
Через установленный (но не очень большой) промежуток времени первый микроконтроллер (25) вновь подаст питание на светодиоды первого (17), второго (20), третьего (21) и четвертого (24) оптронов.
Указанный промежуток времени может составлять от одной до нескольких секунд или десятков секунд. Он должен быть тем меньше, чем по условиям эксплуатации установки требуется более точно поддерживать заданную частоту вращения, а также чем меньшим моментом инерции обладает ротор асинхронного двигателя вместе с присоединенными движущимися массами вращаемого электродвигателем механизма.
Величина данного промежутка времени, в течение которого асинхронный двигатель (1) будет вращаться по инерции в обесточенном состоянии, вводится в микроконтроллер (25) с помощью модуля беспроводной связи (6) со смартфона или с какого-то другого устройства, где установлено соответствующее программное обеспечение и подключен аналогичный модуль.
Вновь первый (18), второй (19), третий (22) и четвертый (23) тиристоры перейдут в проводящее состояние. В асинхронном двигателе (1) снова начнет создаваться электромагнитный момент.Двигатель снова начнет ускорять свое вращение, если электромагнитный момент на его валу окажется больше момента сопротивления. Снова вычисляемая микроконтроллером (25) разность фаз ϕ будет регулярно сравниваться с требуемой предельно допустимой величиной ϕтр - до тех пор, пока не окажется меньше нее.
Как только полученная разность фаз ϕ между напряжением и током асинхронного двигателя (1) окажется меньше заданной (ϕтр), первый микроконтроллер (25) снова обесточит светодиоды первого (17), второго (20), третьего (21) и четвертого (24) оптронов. Соответственно, первый (18), второй (19), третий (22) и четвертый (23) тиристоры опять перейдут в не проводящее состояние. Асинхронный двигатель (1) будет снова обесточен, тем не менее, продолжая вращаться по инерции («на выбеге»).
Далее, через установленный промежуток времени микроконтроллер (25) вновь подаст питание на светодиоды первого (17), второго (20), третьего (21) и четвертого (24) оптронов и т.д.
Описанный цикл перезапусков электродвигателя (1) будет повторяться вновь и вновь - до тех пор, пока не поступит команда на отключение электродвигателя (см. выше) или на изменение заданной разности фаз ϕтр.
Изменение заданной разности фаз ϕтр может быть в микроконтроллер (25) введено «вручную» с помощью кнопок уменьшения (7) и увеличения (8) частоты вращения или дистанционно - с помощью модуля беспроводной связи (6) со смартфона либо какого-то другого устройства, где установлено соответствующее программное обеспечение и подключен аналогичный модуль.
В последнем случае, если вновь введенное значение заданной разности фаз ϕтр будет меньше той, что ей предшествовало, команда на отключение электродвигателя первым микроконтроллером (12) просто будет подана немного позднее, а именно, когда асинхронный двигатель (1) разгонится до частоты вращения, соответствующей вновь заданной разности фаз ϕтр.
Если же вновь введенная величина заданной разности фаз ϕтр окажется больше той, что ей предшествовала, асинхронный двигатель (1) будет тормозиться «на выбеге», двигаясь по инерции, и достигнет заданных оборотов после одной или нескольких попыток его перезапуска со стороны микроконтроллера (25). Число таких попыток будет определяться тем, как быстро будут падать обороты электродвигателя (1), то есть как долго измеряемая при каждом очередном перезапуске разность фаз ϕтр асинхронного двигателя (1) будет оказываться более вновь установленной.
Таким образом под действием предлагаемого регулятора асинхронный двигатель (1) будет работать в так называемом повторно - кратковременном режиме, при котором частота его вращения будет незначительно меняться около своего значения, требуемого по условиям эксплуатации установки в целом.
Отметим также, что если задаваемое значение разности фаз ϕтр окажется меньше минимального значения разности фаз, присущего данному асинхронному двигателю (1), предлагаемый регулятор по факту перестанет выполнять свою функцию «поддержания» заданной частоты вращения. В этом случае электродвигатель будет вращаться, что называется, «на постоянной основе», с той частотой, при которой создаваемый им электромагнитный момент будет равен моменту сопротивления на его валу. А предлагаемое устройство превратится в обычный пускатель, хотя и реализованный на полупроводниковых элементах.
Представленное описание позволяет однозначно заявлять, что реализация предлагаемого технического решения существенно упрощает конструкцию регулятора. В отличие от устройства - прототипа работа предлагаемого регулятора не требует использования «датчика» - отдельного блока, элементы которого в отличие от «пускателя» должны располагаться в непосредственной близости от регулируемого асинхронного двигателя.
Помимо того, в отличие от устройства - прототипа заявляемое техническое решение позволяет осуществить дополнительную функцию - «плавного пуска» регулируемого асинхронного двигателя, что несомненно положительным образом скажется и на его работе, и на работе механизма, с ним соединенного.
При этом сохраняются весьма полезные свойства устройства - прототипа. В частности, эксплуатирующий персонал с помощью смартфона или какого-либо другого устройства, например, планшета или ноутбука, где установлено соответствующее программное обеспечение и подключен модуль беспроводной связи по WiFi и (или) Bluetooth, благодаря его применению, может регулировать частоту вращения электропривода, исходя из оптимальной производительности, в том числе, с точки зрения работы установки в целом. Данное обстоятельство позволит не только предотвратить бесполезное расходование электроэнергии из сети, но также экономить моторесурс механизма, приводимого в движение асинхронным двигателем.
Кроме того отметим, что массо - габаритные показатели предлагаемого регулятора как и блока, называвшегося авторами устройства - прототипа «пускателем», будут определяться, в первую очередь, конструкцией и размерами переключателя (16), а также охладителей, которые могут потребоваться для обеспечения устойчивой работы силовых тиристоров (18), (19), (22) и (23).
Вновь введенные по сравнению с устройством - прототипом элементы предлагаемого устройства незначительно отразятся на массо - габаритных показателях регулятора. Поэтому при определенных условиях размеры и вес предлагаемого устройства могут оказаться даже менее аналогичного с ним по типоразмеру магнитного пускателя, реализованного на элементной базе реле и контакторов.
При этом стоимость заявляемого регулятора будет соизмерима с магнитным пускателем, реализованном на реле и контакторах и аналогичным по типоразмеру, а надежность полупроводниковых коммутирующих приборов, как известно, значительно выше, чем у реле или контакторов, в частности, из-за отсутствия в полупроводниках движущихся частей, а также процессов дугообразования, обусловленных разрывом находящейся под напряжением цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения асинхронного двигателя | 2021 |
|
RU2758441C1 |
| ТРЕХФАЗНЫЙ КОММУТАТОР | 2001 |
|
RU2213413C2 |
| Зарядное устройство для батареи литиевых аккумуляторов | 2024 |
|
RU2828483C1 |
| Устройство для пуска асинхронного электродвигателя | 1981 |
|
SU989715A1 |
| Электропривод | 1986 |
|
SU1348969A1 |
| ТРЕХФАЗНЫЙ КОММУТАТОР | 2001 |
|
RU2202852C2 |
| Асинхронный электродвигатель с фазным ротором | 2024 |
|
RU2828482C1 |
| Участок сети наружного освещения с защитой от аварийных режимов | 1990 |
|
SU1785061A1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОНВЕЙЕРАМИ | 2016 |
|
RU2657527C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |

Регулятор частоты вращения асинхронного двигателя относится к области электротехники и может быть использован в электроприводе для регулирования частоты вращения асинхронных двигателей как с короткозамкнутым ротором, так и с фазным ротором. Техническим результатом заявленного изобретения является улучшение массогабаритных показателей устройства за счет того, что все элементы размещены в одном корпусе, в который из сети заводится один кабель и из которого к электродвигателю выходит другой кабель, что не требует использования датчика, элементы которого должны располагаться в непосредственной близости от регулируемого асинхронного двигателя. Технический результат достигается за счет того, что предлагаемый регулятор содержит трансформатор тока (2), пятый (3) и шестой (4) резисторы, шестой оптрон (5), модуль беспроводной связи (6), кнопки уменьшения (7) и увеличения (8) частоты вращения, а также «Пуск» (9) и «Стоп» (10), четвертый (11) и третий (12) резисторы, пятый оптрон (13), второй (14) и первый (15) резисторы, переключатель (16), первый (18) и второй (19) встречно-параллельно включенные тиристоры, которые введены в первую фазу; третий (22) и четвертый (23) встречно-параллельно включенные тиристоры, которые введены во вторую фазу; первый (17), второй (20), третий (21) и четвертый (24) оптроны, а также микроконтроллер (25). Кроме того, в предлагаемом регуляторе реализована функция плавного пуска электродвигателя, что положительно отражается на работоспособности как самого электродвигателя, так и соединённого с ним механизма. 1 ил.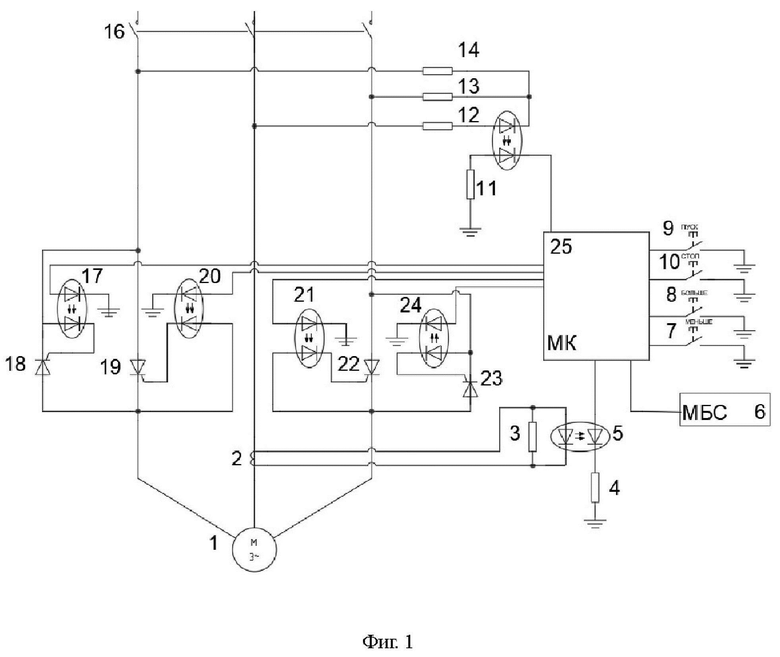
Регулятор частоты вращения асинхронного двигателя, содержащий переключатель, способный коммутировать не менее трех фаз, микроконтроллер, соединенный с соответствующими его контактами модуль беспроводной связи, соединенные также с соответствующими контактами микроконтроллера кнопки «Пуск» и «Стоп», первый и второй встречно-параллельно включенные тиристоры, которые введены в первую фазу, третий и четвертый встречно-параллельно включенные тиристоры, которые введены во вторую фазу, первый, второй, третий и четвертый оптроны, так что анод светодиода первого оптрона соединен с соответствующим контактом микроконтроллера, первый электрод фотоприемника первого оптрона соединен с катодом первого тиристора, второй электрод фотоприемника первого оптрона соединен с управляющим электродом первого тиристора, анод светодиода второго оптрона соединен с соответствующим контактом микроконтроллера, первый электрод фотоприемника второго оптрона соединен с катодом второго тиристора, второй электрод фотоприемника второго оптрона соединен с управляющим электродом второго тиристора, анод светодиода третьего оптрона соединен с соответствующим контактом микроконтроллера, первый электрод фотоприемника третьего оптрона соединен с катодом третьего тиристора, второй электрод фотоприемника третьего оптрона соединен с управляющим электродом третьего тиристора, анод светодиода четвертого оптрона соединен с соответствующим контактом микроконтроллера, первый электрод фотоприемника четвертого оптрона соединен с катодом четвертого тиристора, второй электрод фотоприемника четвертого оптрона соединен с управляющим электродом четвертого тиристора, отличающийся тем, что дополнительно введены пятый и шестой оптроны, кнопки увеличения и снижения частоты вращения, которые соединены с соответствующими контактами микроконтроллера, трансформатор тока, первый, второй, третий, четвертый, пятый и шестой резисторы, причем первый контакт первого резистора соединён с первой фазой, первый контакт второго резистора соединён со второй фазой, первый контакт третьего резистора соединён с третьей фазой, его второй контакт соединён с анодом светодиода пятого оптрона, катод последнего, а также вторые контакты первого и второго резисторов соединены в общую точку, образуя схему «звезда», первый электрод фотоприемника пятого оптрона соединен с четвертым резистором, второй его электрод соединен с соответствующим контактом микроконтроллера, в качестве первичной обмотки трансформатора тока использована третья фаза, концы вторичной обмотки трансформатора тока соединены с контактами пятого резистора, а также анодом и катодом светодиода шестого оптрона, первый электрод фотоприемника шестого оптрона соединен с шестым резистором, а второй его электрод соединен с соответствующим контактом микроконтроллера.
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2076450C1 |
| Регулятор частоты вращения асинхронного двигателя | 2021 |
|
RU2758441C1 |
| Асинхронно-вентильный каскад | 1989 |
|
SU1757076A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1988 |
|
SU1534738A2 |
| US 6020714 A, 01.02.2000 | |||
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |

