Изобретение относится к области электротехники, в частности к таким устройствам, которые позволяют осуществить бесконтактный пуск асинхронного двигателя с фазным ротором.
Асинхронные двигатели широко применяются для приведения в действие различных механизмов: компрессоров, транспортеров, кранового оборудования и других подобных устройств, не редко имеющих значительный пусковой момент. При этом время от времени их приходится устанавливать в помещениях, характеризующихся опасностью возникновения пожара и (или) взрыва.
Наиболее простыми по конструкции, а также необходимому техническому обслуживанию являются асинхронные двигатели с короткозамкнутым ротором. Однако, их непосредственный («прямой») пуск сопровождается весьма большими пусковыми токами, в 5…7 раз превышающими номинальный. При этом, если запускаемый электродвигатель будет достаточно мощным, а питающая его сеть окажется «слабой», такие токи могут вызывать существенное снижение («провал») напряжения, что будет «затягивать» по времени сам пуск, вплоть до возможности его неудачи из-за снижения создаваемого на валу электромагнитного момента.
Для уменьшения пусковых токов применяются различные технические решения конструкции обмоток ротора асинхронного двигателя. Так на с. с. 494…509 монографии (Костенко М.П., Пиотровский Л.М. Электрические машины. В 2-х ч., Ч. 2. - Машины переменного тока. Изд. 3-е перераб. Л., Энергия 1973. 648 с. с ил.) описываются конструкция и принцип действия так называемого двухклеточного двигателя, а на с. с. 509…517 той же монографии - глубокопазного двигателя.
Следует отметить, что оба технических решения - аналога заявляемого изобретения уменьшают величину пусковых токов, но она все же остается кратно большей номинального тока двигателя.
Кардинально решает данную проблему (т.е. снижение величины пусковых токов при обеспечении достаточно высокого пускового момента) описываемый на с. с. 487…490 упомянутой выше монографии пуск асинхронного двигателя с фазным ротором.
Недостатком данного технического решения - аналога является наличие в указанной конструкции такого узла, как щетки с контактными кольцами. Дело в том, что в месте их контакта возможно образование искрения, что совершенно недопустимо, например, в тех случаях, когда двигатель предполагается использовать в помещениях, характеризующихся опасностью возникновения пожара и(или) взрыва. Кроме того, из-за истирания в процессе эксплуатации такого двигателя щетки приходится периодически заменять, что отнюдь не упрощает его техническое обслуживание.
В качестве прототипа заявляемого технического решения был выбран асинхронный двигатель с устройством пуска, описанным в (см. патент RU 2055443 C1, опубл. 27.02.1996). Данное техническое решение также применимо к асинхронным двигателям с фазным ротором.
Оно содержит статор, первую, вторую и третью фазные обмотки ротора, соединенные по схеме «звезда», три пары: первый с вторым, третий с четвертым и пятый с шестым встречно-параллельно включенных тиристора, а также блок управления ими.
Недостатком данного устройства является невозможность с его помощью обеспечить пожаро- и взрывобезопасность работы асинхронного двигателя с фазным ротором из-за необходимости использования упомянутого выше узла «щетки - контактные кольца».
Технический результат, достигаемый заявляемым техническим решением, состоит в повышении пожаро- и взрывобезопасности асинхронного двигателя с фазным ротором путем устранения необходимости использования щеток и контактных колец.
Поставленная задача решается следующим образом.
Асинхронный двигатель с фазным ротором, содержащий статор, первую, вторую и третью фазные обмотки ротора, соединенные по схеме «звезда», три пары, первый с вторым, третий с четвертым и пятый с шестым встречно-параллельно включенных тиристора, а также блоки управления ими, отличающийся тем, что первый, второй, третий, четвертый, пятый и шестой попарно встречно-параллельно включенные тиристоры, а также блоки управления ими располагаются на роторе асинхронного двигателя, равно как и соединенные по схеме «звезда» первый, второй и третий пусковые резисторы.
Причем встречно-параллельная пара, состоящая из первого и второго тиристоров, соединена с общими точками третьей фазной обмотки и третьего пускового резистора, а также второй фазной обмотки и второго пускового резистора. Встречно-параллельная пара, состоящая из третьего и четвертого тиристоров, соединена с общими точками первой фазной обмотки и первого пускового резистора, а также второй фазной обмотки и второго пускового резистора. Встречно-параллельная пара, состоящая из пятого и шестого тиристоров соединена с общими точками первой фазной обмотки и первого пускового резистора, а также третьей фазной обмотки и третьего пускового резистора.
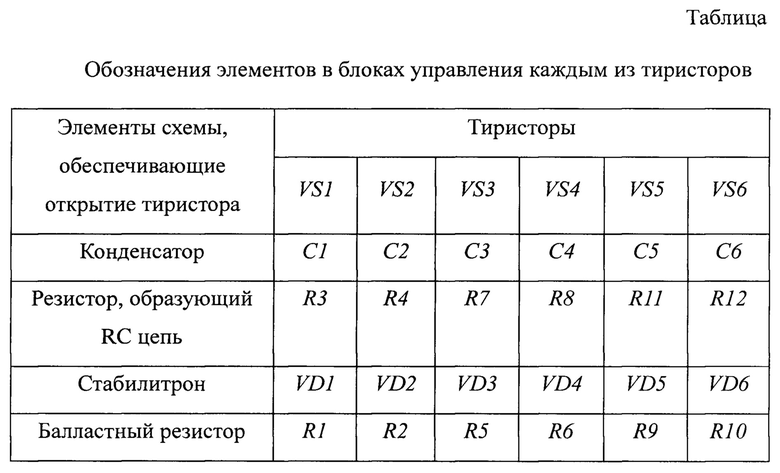
Кроме того, блок управления каждым тиристором состоит из конденсатора, стабилитрона, балластного резистора и резистора, образующего RC цепь. При этом управляющий электрод каждого тиристора соединен с общей точкой соответствующих конденсатора и резистора, образующего RC цепь. Второй электрод конденсатора соединен с катодом тиристора, а второй электрод резистора, образующего RC цепь, соединен с общей точкой стабилитрона и балластного резистора. Анод стабилитрона соединен с катодом тиристора, а второй электрод балластного резистора соединен с общей точкой соответствующих фазной обмотки и пускового резистора.
Далее, каждый пусковой резистор выполнен путем намотки вокруг вала ротора асинхронного двигателя металлической проволоки, имеющей высокое удельное сопротивление. Причем каждый виток проволоки отделен электрической изоляцией от соседнего витка, от соседнего пускового резистора, а также от вала ротора.
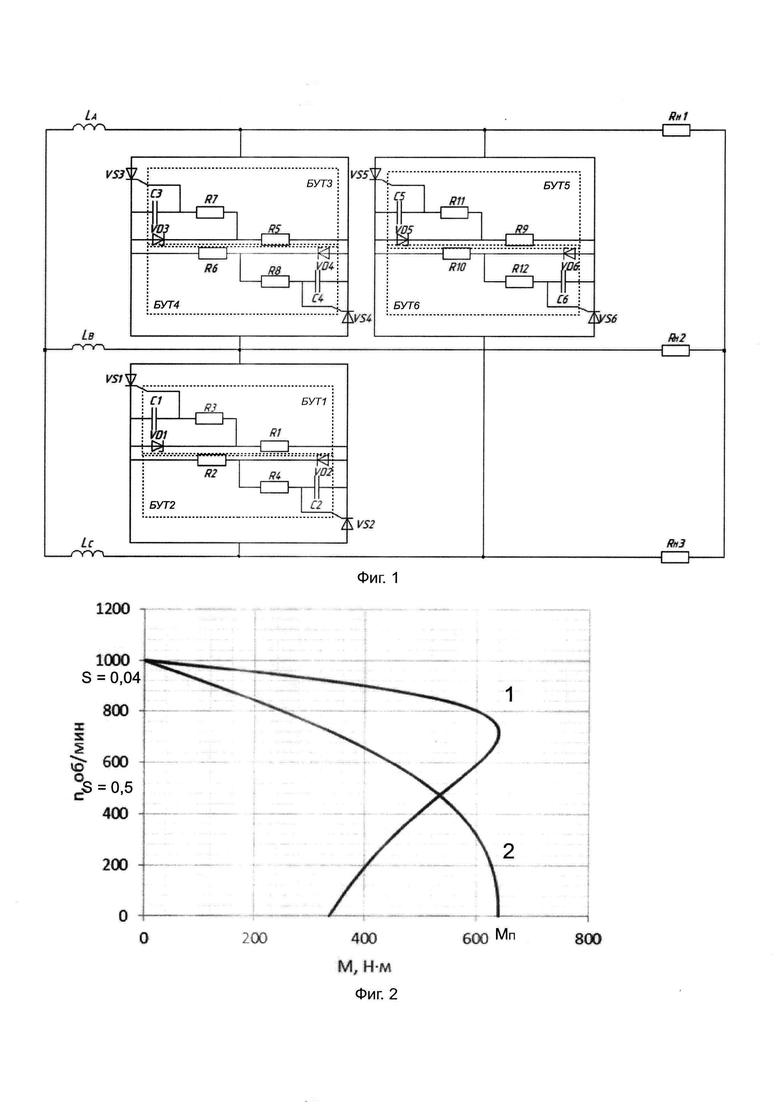
Более подробно заявляемое техническое решение раскрыто в приведенном ниже примере реализации, и иллюстрируется двумя фигурами, где на фиг. 1 представлена принципиальная электрическая схема фазного ротора асинхронного двигателя, а на фиг. 2 его механические характеристики, естественная (1) красным цветом и искусственная (2) - синим.
Статор предлагаемого асинхронного двигателя имеет общеизвестную конструкцию, а его фазный ротор (см. фиг. 1), содержит первую (LA), вторую (LB) и третью (LC) фазные обмотки ротора, соединенные по схеме «звезда», а также три пары, первый (VS1) с вторым (VS2), третий (VS3) с четвертым (VS4) и пятый (VS5) с шестым (VS6) встречно-параллельно включенных тиристора, причем первый (VS1), второй (VS2), третий (VS3), четвертый (VS4), пятый (VS5) и шестой (VS6) попарно встречно-параллельно включенные тиристоры располагаются на роторе асинхронного двигателя, равно как и соединенные по схеме «звезда» первый (RH1), второй (RH2) и третий (RH3) пусковые резисторы.
Встречно-параллельная пара, состоящая из первого (VS1) и второго (VS2) тиристоров, соединена с общими точками третьей фазной обмотки (LC) и третьего пускового резистора (RH3), а также второй фазной обмотки (LB) и второго пускового резистора (RH2). Встречно-параллельная пара, состоящая из третьего (VS3) и четвертого (VS4) тиристоров, соединена с общими точками первой фазной обмотки (LA) и первого пускового резистора (RH1), а также второй фазной обмотки (LB) и второго пускового резистора (RH2). Встречно-параллельная пара, состоящая из пятого (VS5) и шестого (VS6) тиристоров соединена с общими точками первой фазной обмотки (LA) и первого пускового резистора (RH1), а также третьей фазной обмотки (LC) и третьего пускового резистора (RH3).
Блок управления (БУТ1 … БУТ6) каждым тиристором (VS1 … VS6) состоит из относящихся к каждому из этих тиристоров конденсатора, стабилитрона, балластного резистора и резистора, образующего RC цепь. Причем управляющий электрод каждого тиристора (VS1 … VS6) соединен с общей точкой соответствующих конденсатора (С1 … С6) и резистора, образующего RC цепь (обозначения - см. в табл.). Второй электрод конденсатора (С7 … С6) соединен с катодом тиристора (VS1 … VS6), а второй электрод резистора, образующего RC цепь (см. табл.), соединен с общей точкой стабилитрона (VD1 … VD6) и балластного резистора (см. табл.). Анод стабилитрона (VD1 … VD6) соединен с катодом тиристора (VS1 … VS6), а второй электрод балластного резистора (см. табл.) соединен с общей точкой соответствующих фазной обмотки (LA … LC) и пускового резистора (RH1 … RH3).
Кроме того, каждый пусковой резистор (RH1 … RH3) выполнен путем намотки вокруг вала ротора асинхронного двигателя металлической проволоки, имеющей высокое удельное сопротивление. При этом каждый виток проволоки отделен электрической изоляцией от соседнего витка, от соседнего пускового резистора, а также от вала ротора.
В процессе пуска электродвигателя схема, представленная на фиг. 1, работает следующим образом.
Для начала отметим, что часть схемы, включающая в себя:
• тиристоры VS1 и VS2, стабилитроны VD1 и VD2, конденсаторы С1 и С2, а также резисторы R1 … R4 (то есть часть схемы, заключенная между фазными обмотками LB и LС ротора асинхронного двигателя),
полностью идентична и состоит из совершенно таких же элементов, что и части схемы, включающие в себя:
• тиристоры VS3 и VS4, стабилитроны VD3 и VD4, конденсаторы С3 и С4, а также резисторы R5 … R8 (см. часть схемы, заключенную между фазными обмотками LA и LB)
• тиристоры VS5 и VS6, стабилитроны VD5 и VD6, конденсаторы С5 и С6, а также резисторы R9 … R12 (то есть часть схемы, включенная между фазами LA и LС).
Поэтому сначала покажем, как должна работать та часть схемы, что заключена между фазными обмотками LB и LС ротора асинхронного двигателя. Обе оставшиеся части (т.е. включенные между обмотками LA и LB, а также обмотками LA и LС) будут функционировать подобным образом.
Прежде всего отметим, что сама данная часть схемы внутренне симметрична, то есть, во-первых, соединены между собой похожим образом соответствующие ее элементы, а именно:
• тиристоры VS1 и VS2;
• стабилитроны VD1 и VD2;
• конденсаторы С1 иС2;
• балластные резисторы R1 и R2;
• резисторы, образующие RC цепь, R3 и R4.
А во-вторых, попарно одинаковы их одноименные параметры, т.е. сопротивления у резисторов, емкости у конденсаторов и т.п.
Как известно, «чисто электрические» процессы в электромеханических системах протекают на порядок быстрее, чем «чисто механические». Поэтому, далее функционирование схемы будет рассмотрено на следующих трех этапах пуска и разгона электродвигателя.
1) Сразу после подачи питания на обмотки статора асинхронного двигателя, в фазных обмотках его ротора, до тех пор, пока ротор не начнет двигаться, будет наводиться напряжение точно такой же частоты, как и напряжение питания. Если к обмоткам статора было подведено питание с частотой ƒсети=50 Гц, то период напряжения, создаваемого в обмотках ротора, составит: T2=1 / ƒсети = 1 / 50 Гц=0,02 с. А для половины периода потребуется, соответственно, 0,01 с.
Как уже отмечалось, фазные обмотки ротора асинхронного двигателя включены по схеме «звезда». Следовательно, рассматриваемая часть схемы, заключенная между фазными обмотками LB и LС ротора асинхронного двигателя (см. фиг. 1), оказывается подключенной к соответствующему линейному напряжению.
Продолжим рассматривать, как будет себя вести эта часть схемы в ходе пуска двигателя.
Сразу после перехода указанного линейного напряжения через ноль, например, из области отрицательных значений к положительным, через цепочку резисторов R1 - R3 начнет заряжаться конденсатор С1. Напряжение, до которого сможет зарядиться данный конденсатор, будет ограничено напряжением пробоя стабилитрона VD1.
В этой связи заметим, что стабилитроны VD1 … VD6 должны подбираться так, чтобы их напряжение пробоя было чуть более напряжения, необходимого для открытия тиристоров VS1 … VS6, соответственно.
Скорость заряда конденсатора С1 будет определяться постоянной времени RC цепи, состоящей из данного конденсатора, а также резистора R3. Так, если емкость конденсатора С1 будет равна 10 мкФ (10-5 Ф), а сопротивление резистора R3 - 2 кОм (2 × 103 Ом), то постоянная времени такой RC цепи составит:
τ=С1 × R3=10-5 Ф × 2 × 103 Ом=0,02 с
Поэтому, пока частота напряжения, приложенного к обмоткам статора асинхронного двигателя остается равной 50 Гц (как уже отмечалось выше, продолжительность соответствующего полупериода ЭДС составляет 0,01 с) и ротор асинхронного двигателя не начнет свое движение, напряжение, поступающее с конденсатора С1 на управляющий электрод тиристора VS1, будет оставаться менее того, которое было бы необходимо для открытия данного тиристора.
Тиристор VS1 будет закрыт (то есть он практически не будет пропускать через себя электрический ток), и ток, протекающий по фазным обмоткам LB и LС ротора электродвигателя, будет определяться соотношением создаваемого ими линейного напряжения, которое приложено к размещенным на роторе «пусковым» сопротивлениям RH2 и RH3, а также сопротивлениям фазных обмоток LB и LC ротора. В описанных обстоятельствах момент, создаваемый на валу асинхронного двигателя, будет равен начальному или пусковому на его искусственной механической характеристике, см. также точку «МП» на фиг. 2, где механическая характеристика (2) «примыкает» к оси абсцисс.
В следующий полупериод, когда линейное напряжение, создаваемое фазными обмотками LB и LC ротора асинхронного двигателя, перейдет от положительных значений к отрицательным, конденсатор С1 начнет разряжаться. Ускорению данного процесса будет способствовать то обстоятельство, что к положительно заряженной обкладке данного конденсатора окажется приложено отрицательное напряжение.
Тем временем, через цепочку резисторов R2 - R4 начнет заряжаться конденсатор С2. Как и в предыдущем полупериоде, когда заряжался конденсатор С1, величина напряжения, до которого мог бы зарядиться конденсатор С2, будет ограничена напряжением пробоя стабилитрона VD2, которое, в свою очередь, должно быть чуть более напряжения, необходимого для открытия тиристора VS2.
Емкость конденсатора С2 должна быть такой же, как емкость конденсатора С1, и составлять 10 мкФ (10-5 Ф), а сопротивление резистора R4, как и R3, - 2 кОм (2×103 Ом), поэтому постоянная времени данной RC цепи также будет равна 0,02 с.
Другими словами, напряжение на управляющем электроде тиристора VS2, снова будет меньше того, которое было бы необходимо для открытия данного тиристора. Электромагнитный момент, создаваемый на валу асинхронного двигателя, будет оставаться равным начальному или пусковому на его искусственной механической характеристике, вновь см. точку «МП» на фиг. 2.
Описанные процессы будут повторяться и после начала движения ротора - всякий раз, пока продолжительность полупериода линейного напряжения, создаваемого фазными обмотками LB и LC ротора асинхронного двигателя будет оставаться менее 0,02 с, т.е. постоянной времени RC цепей, состоящих из конденсатора С1 и резистора R3, а также конденсатора С2 и резистора R4.
Следовательно, все это время на валу двигателя будет создаваться электромагнитный момент, соответствующий искусственной характеристике (2), см. фиг. 2. Если он будет больше противодействующего ему тормозного момента (его еще называют «моментом сопротивления» или «моментом трогания»), ротор электродвигателя должен будет прийти во вращение, которое будет ускоряться с каждым оборотом.
Двигаясь описанным образом, по прошествии некоторого времени электродвигатель сможет достичь, в частности оборотов, соответствующих скольжению S=0,5, которое равно половине синхронной скорости вращения электромагнитного поля, создаваемого статором электродвигателя, см. также фиг. 2. Здесь данное скольжение примерно соответствует точке пересечения естественной (1) и искусственной (2) механических характеристик.
При такой скорости вращения ротора АД в его фазных обмотках будет наводиться ЭДС, в два раза меньше по частоте и по амплитуде чем те, что были в самый первый момент времени после подачи питания к обмоткам статора, когда еще ротор не двигался. Иначе говоря, если частота питающего напряжения осталась равной 50 Гц, то в фазных обмотках ротора АД будет наводиться ЭДС, имеющая частоту: ƒ2=0,5-50 Гц=25 Гц.
Такой частоте будет соответствовать период продолжительностью:
А для половины данного периода потребуется, соответственно, 0,02 с.
2) Когда полупериод наводимой в обмотках ротора ЭДС превысит постоянную времени RC цепей, функционирование заявляемой схемы, изменится следующим образом. Продолжим рассматривать ту часть схемы, что заключена между фазными обмотками LB и LC ротора асинхронного двигателя, см. фиг. 1.
Если частота питающего напряжения остается равной 50 Гц, продолжительность полупериода линейного напряжения, создаваемого фазными обмотками ротора LB и LC, сможет стать более 0,02 с только, когда асинхронный двигатель разгонится до скольжения, меньшего 50% (то есть до частоты вращения больше половины синхронной), а наводимая в обмотках ротора частота станет меньше 25 Гц.
Теперь при постоянной времени RC цепи, равной 0,02 с, конденсаторы С1 и С2 уже будут успевать заряжаться до такого напряжения, которое необходимо для «открытия» тиристоров VS1 и VS2, соответственно.
После того, как в начале данного полупериода конденсатор С1 зарядится до соответствующего напряжения (то есть до того, которого будет достаточно, чтобы открыть тиристор VS1), оставшуюся часть «положительного» полупериода тиристор VS1 будет «открыт», шунтируя таким образом, «пусковые» сопротивления RH2 и RH3, размещенные на роторе. В отличие от начала наступившего полупериода теперь, после шунтирования пусковых сопротивлений RH2 и RH3, создаваемый электромагнитный момент скачкообразно изменяется. В оставшуюся часть данного полупериода электродвигатель будет работать по той механической характеристике, которая близка к естественной (1), см. фиг. 2.
Точно также во время следующего, «отрицательного» полупериода линейного напряжения, создаваемого фазными обмотками LB и LC ротора асинхронного двигателя, сначала до напряжения открытия тиристора VS2 должен будет зарядиться конденсатор С2.
После чего, открывшись, тиристор VS2 начнет шунтировать пусковые сопротивления RH2 и RH3, и электродвигатель снова будет работать на своей механической характеристике, близкой к естественной (1), см. фиг. 2.
Таким образом, когда двигатель достаточно разгонится, и полупериод наводимой в обмотках его ротора ЭДС превысит постоянную времени RC цепей, в начальную часть (0,02 с) каждого такого полупериода, электродвигатель будет работать по искусственной механической характеристике.
Зато после заряда соответствующего конденсатора и открытия «его» тиристора электродвигатель будет работать по характеристике, близкой к естественной. Электромагнитный момент асинхронного двигателя будет скачкообразным образом меняться в пределах каждого полупериода ЭДС, создаваемой фазными обмотками его ротора. В этой ситуации можно говорить о среднем за такой полупериод значении электромагнитного момента двигателя.
3) Окончание пуска асинхронного двигателя - наступит, когда его «средний» электромагнитный момент окажется равным моменту сопротивления на валу, создаваемым механизмом, приводимым во вращение.
До тех пор, пока средний электромагнитный момент, создаваемый взаимодействием токов в обмотках статора и ротора асинхронного двигателя, будет больше момента сопротивления на его валу, ротор будет ускоряться. Однако, продолжая разгоняться указанным образом, асинхронный двигатель с фазным ротором в конце концов должен будет достичь таких оборотов, при которых создаваемый им средний электромагнитный момент окажется равным моменту сопротивления на валу. Пусть, для определенности, указанной ситуации будет соответствовать скольжение S=0,04 (4%), см. также фиг. 2.
Отметим, что данному скольжению будут соответствовать 4% от амплитуды и 4% от частоты того напряжения, которое создавалось фазными обмотками LB и LC ротора асинхронного двигателя и наблюдалось в самый начальный момент его пуска, когда его ротор все еще оставался неподвижным. В случае питающей частоты 50 Гц на роторе будет наблюдаться частота:

Период, соответствующий данной частоте:  а полупериод -0,25 с.
а полупериод -0,25 с.
В указанные 0,25 с, т.е. в каждый полупериод «равномерного» вращения асинхронного двигателя при постоянной времени RC цепи, составляющей 0,02 с, первые несколько сотых секунды тиристоры VS1 и VS2 будут закрыты. Ток в это время будет протекать через пусковые сопротивления RH2 и RH3, а двигатель - работать на искусственной механической характеристике.
Зато в оставшуюся, причем на порядок большую часть полупериода ЭДС, создаваемой фазными обмотками LB и LC ротора асинхронного двигателя, тиристоры VS1 и VS2 будут шунтировать пусковые сопротивления RH2 и RH3, и следовательно, электродвигатель будет работать на той своей механической характеристике, которая близка к естественной.
Представленное описание позволяет утверждать, что реализация заявляемого технического решения безусловно обеспечивает решение задачи бесконтактного пуска асинхронного двигателя с фазным ротором.
Поэтому при реализации заявляемого технического решения конструкцию асинхронного двигателя с фазным ротором без особых последствий можно облегчить за счет отказа от контактных колец, щеток и щеткодержателей. Зато освободившиеся в электрической машине объемы можно будет использовать для размещения на роторе пусковых резисторов и других электронных компонентов, представленных на фиг. 1.
Помимо повышения взрыво- и пожаробезопасности электродвигателя предлагаемой конструкции, применение заявляемого технического решения позволяет упростить и конструкцию электроустановки в целом - за счет отказа от использования пускового реостата и другой пускорегулирующей аппаратуры, обычно располагаемых отдельно от электродвигателя. Как показывает опыт, их массо-габаритные параметры не редко оказываются более, чем соизмеримыми с размерами «регулируемого» электродвигателя, а то и механизма в целом.
Если отпадает необходимость в использовании контактных колец, щеток и щеткодержателей, а также пусковых реостатов с пускорегулирующей аппаратурой, что вполне допустимо при осуществлении заявляемого технического решения, работы по техническому обслуживанию электрической части механизма, приводимого во вращение асинхронным двигателем с фазным ротором существенно упрощаются. Последнее совершенно однозначно ведет к снижению требований по квалификации персонала, обслуживающего данный механизм, а также расходов на эксплуатацию механизма в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный двигатель с фазным ротором | 2021 |
|
RU2773335C1 |
| ПОЛУПРОВОДНИКОВЫЙ РЕДУКТОР, ВЕДОМЫЙ СЕТЬЮ, ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ОДНОФАЗНОГО ДВУХОБМОТОЧНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2439774C1 |
| Асинхронный электродвигатель с фазным ротором | 2024 |
|
RU2828482C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2401503C1 |
| Реверсивное полупроводниковое устройство регулирования скорости трехфазного асинхронного электродвигателя | 2015 |
|
RU2622394C1 |
| Устройство для повышения коэффициента мощности выпрямительно-инверторного преобразователя однофазного переменного тока | 2020 |
|
RU2760815C1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОПРИВОД С ПИТАНИЕМ ОТ ОДНОФАЗНОЙ СЕТИ | 1992 |
|
RU2054788C1 |
| Способ пуска асинхронного электродвигателя и устройство для его осуществления | 1990 |
|
SU1774453A1 |
| Устройство для защиты трехфазного асинхронного электродвигателя от работы на двух фазах | 1981 |
|
SU1034117A1 |
| Устройство для токовой защиты электродвигателя с обратно зависимой выдержкой времени | 1983 |
|
SU1153373A1 |
Изобретение относится к асинхронному двигателю с фазным ротором, относится к области электротехники и снабжен размещаемыми на его роторе компонентами, действие которых обеспечивает возможность осуществления его бесконтактного пуска. Техническим результатом является повышение пожаро- и взрывобезопасности, а также упрощение конструкции и работы по техническому обслуживанию двигателя и электроустановки в целом. Принципиальная электрическая схема ротора содержит первую (LA), вторую (LB) и третью (LC) фазные обмотки ротора, соединенные по схеме «звезда», а также три пары, первый (VS1) с вторым (VS2), третий (VS3) с четвертым (VS4) и пятый (VS5) с шестым (VS6), встречно-параллельно включенные тиристоры, причем все указанные тиристоры также располагаются на роторе асинхронного двигателя, равно как и соединенные по схеме «звезда» первый (RH1), второй (RH2) и третий (RH3) пусковые резисторы, управляющий электрод каждого тиристора (VS1 … VS6) соединен с общей точкой соответствующего конденсатора (С1 … С6) и резистора, образующего RC цепь. Второй электрод каждого конденсатора (С1 … С6) соединен с катодом «своего» тиристора (VS1 … VS6), а второй электрод резистора, образующего RC цепь (см. табл.), соединен с общей точкой стабилитрона (VD1 … VD6) и балластного резистора (см. табл.). Анод стабилитрона (VD1 … VD6) соединен с катодом тиристора (VS1 … VS6), а второй электрод балластного резистора (см. табл.) соединен с общей точкой соответствующих фазной обмотки (LA … LC) и пускового резистора (RH1 … RH3). Каждый пусковой резистор (RH1 … RH3) выполняется путем намотки вокруг вала ротора асинхронного двигателя металлической проволоки с высоким удельным сопротивлением, каждый виток проволоки отделен электрической изоляцией от соседнего витка, от соседнего пускового резистора, а также от вала ротора. 2 з.п. ф-лы, 2 ил. 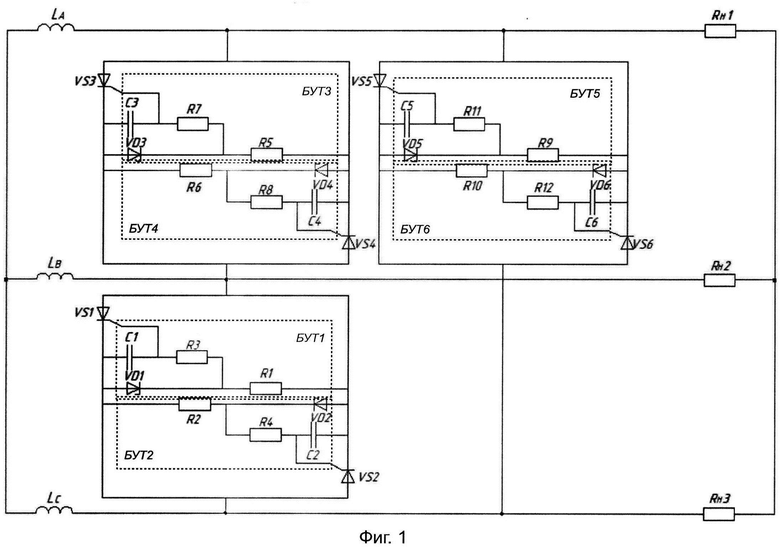
1. Асинхронный двигатель с фазным ротором, содержащий статор, первую, вторую и третью фазные обмотки ротора, соединенные по схеме «звезда», три пары - первый с вторым, третий с четвертым и пятый с шестым - встречно-параллельно включенных тиристоров, а также блоки управления ими, отличающийся тем, что первый, второй, третий, четвертый, пятый и шестой попарно встречно-параллельно включенные тиристоры, а также блоки управления ими располагаются на роторе асинхронного двигателя, равно как и соединенные по схеме «звезда» первый, второй и третий пусковые резисторы, причем встречно-параллельная пара, состоящая из первого и второго тиристоров, соединена с общими точками третьей фазной обмотки и третьего пускового резистора, а также второй фазной обмотки и второго пускового резистора, встречно-параллельная пара, состоящая из третьего и четвертого тиристоров, соединена с общими точками первой фазной обмотки и первого пускового резистора, а также второй фазной обмотки и второго пускового резистора, встречно-параллельная пара, состоящая из пятого и шестого тиристоров, соединена с общими точками первой фазной обмотки и первого пускового резистора, а также третьей фазной обмотки и третьего пускового резистора.
2. Асинхронный двигатель с фазным ротором по п. 1, отличающийся тем, что блок управления каждым тиристором состоит из конденсатора, стабилитрона, балластного резистора и резистора, образующего RC цепь, причем управляющий электрод данного тиристора соединен с общей точкой соответствующих конденсатора и резистора, образующего RC цепь, второй электрод конденсатора соединен с катодом тиристора, а второй электрод резистора, образующего RC цепь, соединен с общей точкой стабилитрона и балластного резистора, анод стабилитрона соединен с катодом тиристора, а второй электрод балластного резистора соединен с общей точкой соответствующих фазной обмотки и пускового резистора.
3. Асинхронный двигатель с фазным ротором по п. 1, отличающийся тем, что каждый пусковой резистор выполнен путем намотки вокруг вала ротора асинхронного двигателя металлической проволоки, имеющей высокое удельное сопротивление, причем каждый виток проволоки отделен электрической изоляцией от соседнего витка, от соседнего пускового резистора, а также от вала ротора.
| RU 2055443 C1, 27.02.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2017 |
|
RU2661343C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| RU 23000169 C1, 27.05.2007 | |||
| US 4721898 A, 26.01.1988 | |||
| DE 8806692 U1, 07.07.1988. | |||

