Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано в системах интервального регулирования движения поездов.
Известна система, реализующая способ, включающий выделение из принимаемых на рельсовом транспортном средстве кодовых сигналов, поступающих от путевых формирователей кодовых сигналов, информационных сообщений о количестве свободных и исправных блок-участков и/или рельсовых цепей перед рельсовым транспортным средством, об идентифицирующих номерах блок-участка и/или рельсовой цепи и о текущем местонахождении головы рельсового транспортного средства.
Система, реализующая этот способ и обеспечивающая управление рельсовым транспортным средством, содержит на каждом рельсовом транспортном средстве блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены, соответственно, с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу (RU 2423269, B61L 25/04, 10.07.11).
Недостаток известного технического решения заключается в том, что при сбое (например, из-за помех по электропитанию) в определении текущей координаты места нахождения транспортного средства теряется информация не только о его местонахождении в привязке к электронной карте маршрута, но и информация о максимальных допустимых скоростях движения, обусловленных конструктивными ограничениями железнодорожного пути. Эта ситуация требует снижения скорости до разрешенной по условиям безопасности проследования ограничивающих элементов путевой инфраструктуры. Например, так как из-за сбоя появляется неопределенность в том, какой маршрут приема будет использован по главным путям станции или по боковым путям станции, система управления рельсовым транспортным средством автоматически выбирает ограничение скорости при движении по боковым путям. Движение с этой скоростью происходит до восстановления правильной привязки к электронной карте маршрута. Если восстановление привязки к электронной карте маршрута задержится вплоть до подхода транспортного средства к горловине принимающей станции, то это приводит к существенным задержкам в приготовлении маршрутов для других поездов и снижению пропускной способности в горловине станции приема.
В качестве прототипа способа выбран способ управления рельсовым транспортным средством, по которому на каждом блок-участке контролируют исправность и свободность рельсового пути, формируют и передают в рельсовую цепь кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи, переданные сигналы принимают бортовым устройством рельсового транспортного средства, определяют текущее местонахождение головы рельсового транспортного средства, при приближении поезда на перегоне к занятому или неисправному блок-участку и/или рельсовой цепи осуществляют требуемое по условиям безопасности движения снижение скорости, передаваемые в рельсовую цепь кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи вводят монотонно возрастающие в направлении против установленного направления движения при автоблокировке, начиная от границы станции приема с перегоном приближения рельсового транспортного средства, числовые значения, идентифицирующие кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи, подсчитывают бортовым устройством рельсового транспортного средства число блок-участков до занятого или неисправного блок-участка, по которому определяют расстояние до занятого или неисправного блок-участка.
В качестве прототипа устройства выбрана система для управления рельсовым транспортным средством, содержащая бортовое устройство рельсового транспортного средства, в котором выход блока контроля безопасности соединен через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу, путевые электрические рельсовые цепи, к каждой из которых подключен путевой передатчик кодового сигнала, сигнальный вход которого соединен с выходом блока контроля свободности и исправности рельсового пути, блоки формирования числовых значений идентификации, управляющие входы которых подключены к соответствующим входам блока задания направления движения по соответствующему пути перегона, а выходы – к входу задания значений идентифицирующих кодовых сигналов соответствующего путевого передатчика кодового сигнала (RU 2518670, B61L 3/10, 10.06.2014).
Недостатком известных способа и системы для его реализации является то, что при движении только по сигналам АЛСН и после въезда на рельсовую цепь, кодируемую кодом Ж, поезду приходится снижать скорость движения до максимально разрешенной для системы АЛСН скорости (60 км/ч) движения на желтый огонь светофора. Это приводит к неоправданному снижению максимальной пропускной способности, по сравнению с максимальной пропускной способностью для участков с рельсовыми цепями, кодируемыми кодами АЛС-ЕН.
Технический результат изобретения заключается в повышении максимальной пропускной способности для участков с рельсовыми цепями АЛС-ЕН, при движении по ним поездов в отсутствие приема на их локомотивах кодов системы АЛС-ЕН и при наличии приема кодов АЛСН.
Технический результат в части способа достигается тем, что в способе управления рельсовым транспортным средством, включающим прием бортовым устройством рельсового транспортного средства кодовых сигналов, поступающих от путевых формирователей кодовых сигналов, информационных сообщений о количестве свободных и исправных блок-участков и/или рельсовых цепей перед рельсовым транспортным средством и об идентификационных номерах блок-участка и/или рельсовой цепи, определение текущего местонахождения головы рельсового транспортного средства, при приближении поезда на перегоне к занятому или неисправному блок-участку и/или рельсовой цепи осуществляют требуемое по условиям безопасности движения снижение скорости, согласно изобретению при движении поезда по участкам с рельсовыми цепями АЛС-ЕН и приеме из рельсовых цепей кодового сигнала Ж только системы АЛСН, расчет тормозного пути производят с учетом количества свободных последовательных рельсовых цепей, кодируемых кодовым сигналом Ж системы АЛСН, их координат и длины в привязке к данным модуля карты маршрута бортового устройства рельсового транспортного средства, находящихся перед рельсовой цепью, занятой впередиидущим поездом, при этом используют данные о текущих координате, скорости, длине и целостности состава впередиидущего поезда, получаемые по радиоканалу от его бортового устройства по периодическим запросам.
Технический результат в части устройства достигается тем, что в систему для управления рельсовым транспортным средством, содержащую бортовое устройство рельсового транспортного средства, в котором выход блока контроля безопасности соединен через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы модулей непрерывных каналов внешних устройств соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости и подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации и с портом радиомодема, соединенного с радиоантенной, блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу, согласно изобретению введен и подключен к межмодульному интерфейсу блок повышения максимальной скорости движения поезда под кодовый сигнал Ж системы АЛСН, состоящий из программного модуля расчета тормозной кривой под кодовый сигнал Ж системы АЛСН, первый вход которого соединен с первым выходом модуля памяти, с записанной в нем информацией о распределении рельсовых цепей, второй вход соединен с выходом модуля повторителя электронной карты участка, а третий вход соединен с первым выходом модуля фиксации приема кодового сигнала Ж системы АЛСН, второй выход которого соединен с входом модуля памяти, с записанной в нем информацией о распределения рельсовых цепей, четвертый и пятый входы модуля расчета тормозной кривой подключены к выходам соответственно модуля расчета скорости и координат локомотива и модуля вычисления расстояния до границы текущей рельсовой цепи, второй выход которого соединен со входом модуля расчета скорости и координат локомотива, а его вход подключен ко второму выходу модуля памяти, с записанной в нем информацией о распределении рельсовых цепей, шестой вход программного модуля расчета тормозной кривой под кодовый сигнал Ж системы АЛСН подключен к выходу модуля формирования запроса по радиоканалу координаты головы, скорости, длины и целостности состава впередиидущего поезда.
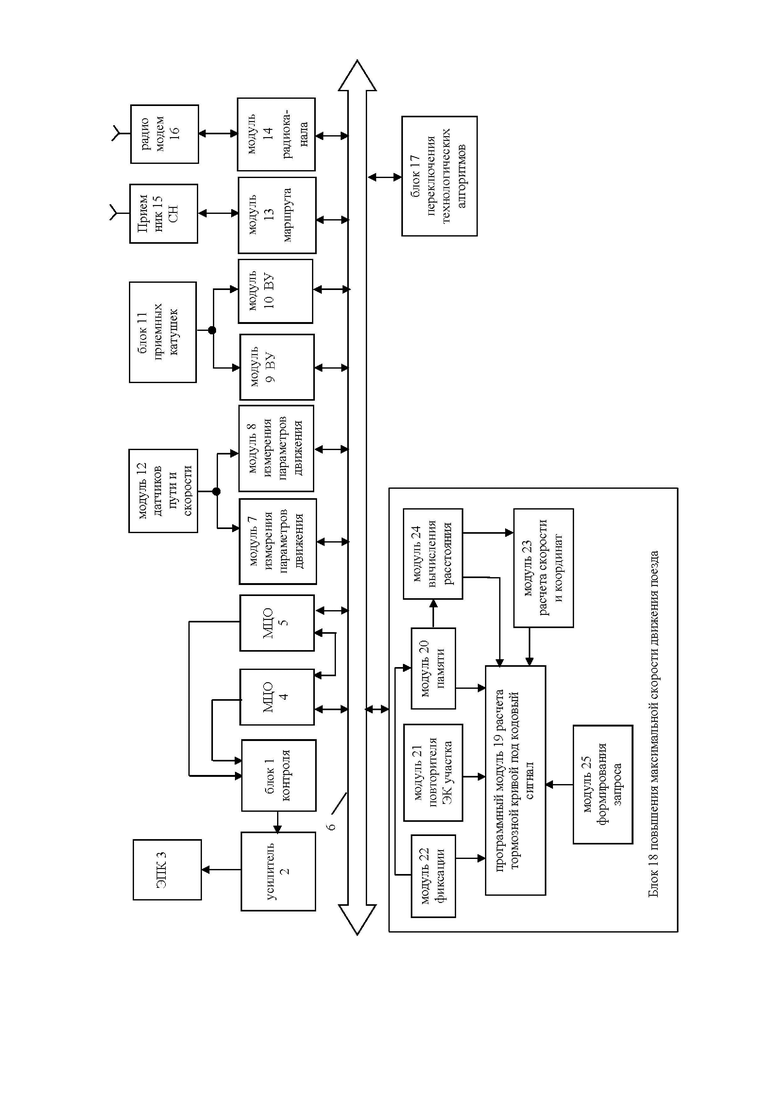
На чертеже приведена функциональная схема системы для управления рельсовым транспортным средством, реализующая предлагаемый способ управления.
Система для управления рельсовым транспортным средством содержит бортовое устройство рельсового транспортного средства, в котором выход блока 1 контроля безопасности соединен через усилитель 2 с входом электропневматического клапана 3 (ЭПК), входы блока 1 контроля безопасности соединены с выходами модулей 4 и 5 центральной обработки информации (МЦО), которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу 6, к которому подключены два модуля 7 и 8 измерения параметров движения и два модуля 9 и 10 непрерывных каналов внешних устройств (ВУ), входы модулей непрерывных каналов внешних устройств соединены с блоком 11 приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей 7 и 8 измерения параметров движения соединены с модулем 12 датчиков пути и скорости и подключенные к межмодульному интерфейсу 6 модуль 13 маршрута и модуль 14 радиоканала, которые своими портами соединены соответственно с портом приемника 15 спутниковой навигации (СН), к входу которого подключена антенна спутниковой навигации и с портом радиомодема 16, соединенного с радиоантенной, блок 17 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу, к межмодульному интерфейсу 6 подключен блок 18 повышения максимальной скорости движения поезда под кодовый сигнал Ж системы АЛСН, состоящий из программного модуля 19 расчета тормозной кривой под кодовый сигнал Ж системы АЛСН, первый вход которого соединен с первым выходом модуля 20 памяти, с записанной в нем информацией о распределении рельсовых цепей, второй вход соединен с выходом модуля 21 повторителя электронной карты (ЭК) участка, а третий вход соединен с первым выходом модуля 22 фиксации приема кодового сигнала Ж системы АЛСН, второй выход которого соединен с входом модуля 20 памяти, с записанной в нем информацией о распределения рельсовых цепей, четвертый и пятый входы модуля 19 расчета тормозной кривой подключены к выходам соответственно модуля 23 расчета скорости и координат локомотива и модуля 24 вычисления расстояния до границы текущей рельсовой цепи, второй выход которого соединен со входом модуля 23 расчета скорости и координат локомотива, а его вход подключен ко второму выходу модуля 20 памяти, с записанной в нем информацией о распределении рельсовых цепей, шестой вход программного модуля 19 расчета тормозной кривой под кодовый сигнал Ж системы АЛСН подключен к выходу модуля 25 формирования запроса по радиоканалу координаты головы, скорости, длины и целостности состава впередиидущего поезда.
Система для управления рельсовым транспортным средством, реализующая способ управления рельсовым транспортным средством, работает следующим образом.
Перед каждой поездкой рельсового транспортного средства, в память модуля 13 маршрута записывают электронную карту маршрута, которая позволяет, совместно с данными о текущих координатах местонахождения рельсового транспортного средства, поступающими от приемника 15 спутниковой навигации, рассчитать параметры режимов ведения рельсового транспортного средства в каждой точке маршрута движения. Параллельно с расчетами скорости движения и местонахождения рельсового транспортного средства, по данным от модуля 13 маршрута и приемника 15 спутниковой навигации, для уменьшения влияния условий по приему сигналов от спутников, фактическая скорость рельсового транспортного средства и пройденный им путь рассчитываются с помощью модулей 7 и 8 измерения параметров движения на основе данных, поступающих от колесных датчиков модуля 12 датчиков пути и скорости. Модули центральной обработки информации 4 и 5, на основе данных от всех других модулей, определяют оптимальный скоростной режим. При приближении рельсового транспортного средства на перегоне к границе занятого блок-участка или другого препятствия с известной координатой, модули центральной обработки информации 4 и 5 осуществляют требуемое по условиям безопасности движения снижение скорости. Для этого они воздействуют через блок 1 контроля безопасности и усилитель 2 на электропневматический клапан 3.
Выделение первичной информации из сигналов автоматической локомотивной сигнализации, воспринимаемых из электрических рельсовых цепей, осуществляют модули 9 и 10 непрерывных каналов внешних устройств. Они выделяют из принимаемых кодовых сигналов АЛСН информацию о количестве свободных блок-участков, а из сигналов АЛС-ЕН – дополнительно индивидуальный номер текущей электрической рельсовой цепи, на которой в данный момент времени находится рельсовое транспортное средство. Эти данные передаются в модули 4 и 5 центральной обработки информации, для выработки соответствующего режима движения и торможения.
Блок 17 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста осуществляет выбор оптимального технологического алгоритма управления торможением и проверки бдительности машиниста, в зависимости от полноты и достоверности всей поступающей на рельсовое транспортное средство оперативной информации. Он позволяет повысить безопасность движения и предотвращает частые переходы устройства на работу по резервному алгоритму со ступенчатым контролем скорости, при котором снижается участковая скорость движения рельсового транспортного средства. Блок 17 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, параллельно с приемником 15 спутниковой навигации, с заданной периодичностью вырабатывает информацию о расчетной координате места нахождения рельсового транспортного средства. Для каждого отрезка впередилежащего пути с расчетной длиной, равной длине пути торможения перед препятствием, в оперативную память модулей центральной обработки информации 4 и 5 заносится информация из модуля 13 маршрута, которая дополняется оперативной информацией, приходящей через модуль 14 радиоканала цифровой связи от стационарных устройств системы (на чертеже не показаны). Эта информация имеет приоритет перед аналогичной по смыслу информацией, считанной из модуля 13 маршрута.
Например, при передаче модулем 14 по радиоканалу цифровой связи координат зоны внезапно появившегося препятствия на пути следования рельсового транспортного средства (упавшее дерево, сход селевого потока, снежной лавины и т.д.), которые могут быть получены от различных подсистем внешнего наблюдения системы транспортной безопасности, блок 17 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, воздействием на модули 4 и 5 центральной обработки информации, изменяет алгоритмы управления торможением и подтверждения бдительности машинистом. То же происходит при прерываниях в нормальной работе радиоканала цифровой связи. В частности, в этих случаях управления торможением и проверки бдительности машиниста, от машиниста требуется дополнительное подтверждение бдительности при проследовании каждого путевого светофора, и этот режим сохраняется до восстановления нормального приема информации модулем 14 по радиоканалу цифровой связи. Для повышения безопасности блок 17 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста использует информацию, передаваемую по радиоканалу цифровой связи от путевых устройств интервального регулирования, при каждом вступлении рельсового транспортного средства на очередную рельсовую цепь. Эта информация для АЛС-ЕН включает идентификационный номер очередной рельсовой цепи, координаты ее входного конца, длину и идентификационный номер следующей за ней рельсовой цепи. Это позволяет повысить достоверность контроля правильности функционирования аппаратуры, посредством проверки совпадения прогнозируемых и фактических событий.
При движении поезда по участкам, где отсутствует исправная работа многозначной автоматической локомотивной сигнализации АЛСН-ЕН, но сохраняется исправная работа АЛСН числового кода и исправно работает частотная автоблокировка, предлагаемое изобретение позволяет снизить потери пропускной способности. Так, при движении поезда по участкам с рельсовыми цепями частотной автоблокировки, особенно существенное снижение пропускной способности возможно из-за того, что несколько последовательных рельсовых цепей, предшествующих рельсовой цепи, занятой предыдущим поездом, кодируются числовым кодовым сигналом Ж, требующим (при АЛСН) движения поезда с максимальной разрешенной скоростью 60 км/час.
В предлагаемом техническом решении (в отличии от прототипа) при приеме из рельсовых цепей автоблокировки кодового сигнала Ж только системы АЛСН, при расчете тормозного пути учитывают количество свободных последовательных рельсовых цепей, кодируемых кодовым сигналом Ж системы АЛСН (их координаты и длины в привязке к данным карты маршрута, взятой из модуля маршрута) и находящихся перед рельсовой цепью, занятой впередиидущим поездом. Также дополнительно используют данные из ответов на периодический запрос по радиоканалу от локомотивных устройств данного поезда к локомотивным устройствам впередиидущего поезда о текущих координате, скорости, длине и целостности состава впередиидущего поезда. Это позволяет, начиная с первой из рельсовых цепей, кодируемых сигналом Ж, построить локомотивным устройствам данного поезда тормозную кривую, аналогичную тормозной кривой при нормальном приеме сигналов АЛС-ЕН.
Для этого, при приеме кодового сигнала Ж кода АЛСН и движению по участку с рельсовыми цепями частотной автоблокировки, блок 17 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста передает управление работой рельсовым транспортным средством блоку 18 повышения максимальной скорости движения поезда под кодовый сигнал Ж системы АЛСН. Блок 18, после фиксации приема кодового сигнала Ж системы АЛСН модулем 22, через межмодульный интерфейс 6 получает от соответствующих модулей системы управления рельсовым транспортным средством все необходимые данные для реализации технологического алгоритма управления торможением, для рассматриваемого случая движения данного поезда. Программный модуль 19 расчета тормозной кривой под кодовый сигнал Ж системы АЛСН получает в этом случае от модуля 20 памяти, с записанной в нем информацией о распределении рельсовых цепей, данные о рельсовых цепях на всех свободных участках пути вплоть до хвоста впередиидущего поезда. Он также получает от модуля 21 повторителя электронной карты участка данные о номерах и длинах этих рельсовых цепей, а также данные о профиле пути. Модуль 19 расчета тормозной кривой использует модуль 23 при расчете скорости и координат локомотива данного поезда, а с помощью модуля 24, вычисляет расстояние до границы конца каждой текущей рельсовой цепи и строит кривую прицельного торможения на границу рельсовой цепи защитного участка, расположенного перед рельсовой цепью, занятой предыдущим поездом. Если с предыдущим поездом возможен радиообмен данными, то с помощью модуля 25, примерно раз в секунду, посылается запрос и обрабатывается ответ от впередиидущего поезда о координатах места положения головы его состава, скорости движения, длины и полноты состава этого поезда. Эти данные дополнительно повышают точность и достоверность рассчитываемой модулем 19 тормозной кривой. Это позволяет дополнительно повысить разрешенную скорость движения поезда, обеспечивающую безопасное попутное следование за впередиидущим поездом.
Таким образом, максимальная скорость поезда в этом режиме сохраняется на уровне допустимой скорости движения, как при приеме кодов системы АЛС-ЕН, и потери пропускной способности не происходит.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля за управлением поезда и бдительностью машиниста | 2019 |
|
RU2718621C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2503564C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2008 |
|
RU2390453C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи. Способ управления рельсовым транспортным средством заключается в том, что принимают кодовые сигналы, информационные сообщения о количестве свободных и исправных блок-участков и/или рельсовых цепей перед рельсовым транспортным средством и об идентификационных номерах блок-участка и/или рельсовой цепи, определяют текущее местонахождение головы рельсового транспортного средства. При движении поезда по участкам с рельсовыми цепями АЛС-ЕН и приеме из рельсовых цепей кодового сигнала Ж только системы АЛСН расчет тормозного пути производят с учетом количества свободных последовательных рельсовых цепей, кодируемых кодовым сигналом Ж системы АЛСН, их координат и длины, находящихся перед рельсовой цепью, занятой впередиидущим поездом. При этом используют данные о текущих координате, скорости, длине и целостности состава впередиидущего поезда, получаемые по радиоканалу от его бортового устройства по периодическим запросам. Также заявлена система для управления рельсовым транспортным средством, включающая блок повышения максимальной скорости движения поезда под кодовый сигнал Ж системы АЛСН. Технический результат заключается в повышении максимальной пропускной способности для участков с рельсовыми цепями АЛС-ЕН. 2 н.п. ф-лы, 1 ил.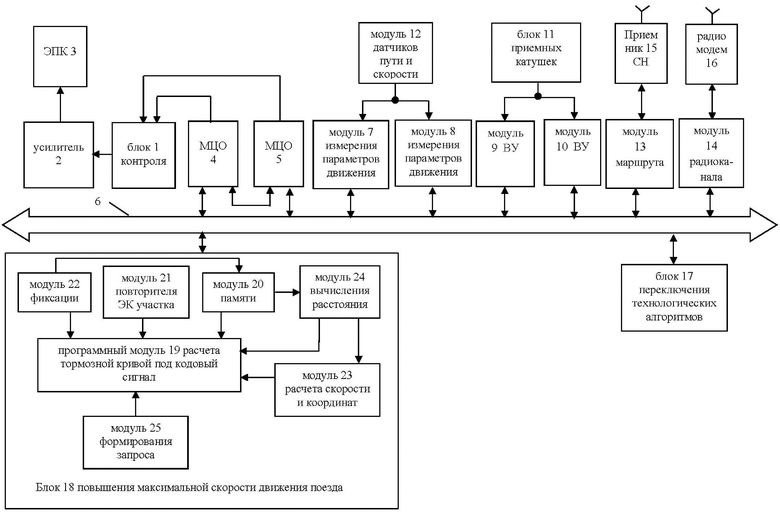
1. Способ управления рельсовым транспортным средством, включающий прием бортовым устройством рельсового транспортного средства кодовых сигналов, поступающих от путевых формирователей кодовых сигналов, информационных сообщений о количестве свободных и исправных блок-участков и/или рельсовых цепей перед рельсовым транспортным средством и об идентификационных номерах блок-участка и/или рельсовой цепи, определение текущего местонахождения головы рельсового транспортного средства, при приближении поезда на перегоне к занятому или неисправному блок-участку и/или рельсовой цепи осуществляют требуемое по условиям безопасности движения снижение скорости, отличающийся тем, что при движении поезда по участкам с рельсовыми цепями АЛС-ЕН и приеме из рельсовых цепей кодового сигнала Ж только системы АЛСН расчет тормозного пути производят с учетом количества свободных последовательных рельсовых цепей, кодируемых кодовым сигналом Ж системы АЛСН, их координат и длины в привязке к данным модуля карты маршрута бортового устройства рельсового транспортного средства, находящихся перед рельсовой цепью, занятой впередиидущим поездом, при этом используют данные о текущих координате, скорости, длине и целостности состава впередиидущего поезда, получаемые по радиоканалу от его бортового устройства по периодическим запросам.
2. Система для управления рельсовым транспортным средством, содержащая бортовое устройство рельсового транспортного средства, в котором выход блока контроля безопасности соединен через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы модулей непрерывных каналов внешних устройств соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости и подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации и с портом радиомодема, соединенного с радиоантенной, блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу, отличающаяся тем, что в нее введен и подключен к межмодульному интерфейсу блок повышения максимальной скорости движения поезда под кодовый сигнал Ж системы АЛСН, состоящий из программного модуля расчета тормозной кривой под кодовый сигнал Ж системы АЛСН, первый вход которого соединен с первым выходом модуля памяти с записанной в нем информацией о распределении рельсовых цепей, второй вход соединен с выходом модуля повторителя электронной карты участка, а третий вход соединен с первым выходом модуля фиксации приема кодового сигнала Ж системы АЛСН, второй выход которого соединен с входом модуля памяти с записанной в нем информацией о распределения рельсовых цепей, четвертый и пятый входы модуля расчета тормозной кривой подключены к выходам, соответственно, модуля расчета скорости и координат локомотива и модуля вычисления расстояния до границы текущей рельсовой цепи, второй выход которого соединен со входом модуля расчета скорости и координат локомотива, а его вход подключен ко второму выходу модуля памяти с записанной в нем информацией о распределении рельсовых цепей, шестой вход программного модуля расчета тормозной кривой под кодовый сигнал Ж системы АЛСН подключен к выходу модуля формирования запроса по радиоканалу координаты головы, скорости, длины и целостности состава впередиидущего поезда.
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| Индукционный преобразователь угла поворота в импульсный электрический сигнал | 1960 |
|
SU141193A1 |
| US 6732023 B2, 04.05.2004. | |||

