Изобретение относится к железнодорожному транспорту и предназначено для интервального регулирования движения поездов.
Известны системы (Труды Российского научно-исследовательского и проектно-конструкторского института информатизации, автоматизации и связи на железнодорожном транспорте. ВНИИАС, выпуск 7, М.2007 г., с.8-10), в которых для обеспечения безопасности движения поездов реализована возможность принудительной остановки локомотива или нескольких локомотивов, независимо от действий машинистов, по командам дежурного по станции, поездного диспетчера, передаваемым по радиоканалу.
В известных системах дежурный по станции получает в режиме реального времени информацию о допустимой и фактической скорости локомотивов, их железнодорожных координатах, направлении движения, позиционировании на мнемосхеме станции/перегона.
Недостатком известных систем является отсутствие возможности непрерывного получения сведений о впередиидущем поезде непосредственно машинистом последующего поезда. Это не позволяет машинисту последующего поезда принимать оптимальные решения по режиму ведения.
Известна система управления поездом, движущегося в составе пакета из двух виртуально сцепленных поездов, управляемых по принципу «ведущий-ведомый», при котором режим движения ведомого поезда синхронизируется с режимом движения ведущего поезда. Ведущий поезд постоянно поддерживает осведомленность об окружающей среде и собирает данные о своем состоянии, которые затем передаются ведомому поезду посредством прямой связи «точка-точка», а стратегия управления формируется путем сравнительного расчета данных ведущего и ведомого поезда, при этом ведомый поезд, с учетом получаемой в режиме реального времени информации об ускорении/торможении ведущего поезда, динамически рассчитывает свой скоростной режим таким образом, чтобы следовать за впередиидущим поездом на минимальном расстоянии с поддержанием заданного интервала следования (CN107685749A, B61L23/00, 13.02.2018).
Основным недостатком известной системы является несовместимость с существующей системой сигнализации на магистральных линиях по правилам безопасности, а также возможность использования технологии только при гарантированной радиосвязи, например, при управлении поездами в замкнутой системе городского транспорта, где в случае пропадания радиосвязи система переходит в защитное состояние, в котором за безопасный интервал следования отвечает машинист либо производится экстренная остановка поезда. Система также исключает возможность передачи данных и управления через удаленный распорядительный центр.
Наиболее близкой по своей технической сущности к заявляемому изобретению является принятая в качестве прототипа система обеспечения оптимального безопасного движения поездов, следующих друг за другом, содержащая средства космической связи и позиционирования, соединенные посредством канала радиосвязи с приемником сигналов позиционирования, установленном на локомотиве каждого поезда, постовое центральное устройство, включающее блок идентифицирования поезда, блок вычисления расстояния между поездами и блок вычисления скорости сближения поезда, каждый из которых связан через сервер с коммутатором каналов, соединенным с помощью каналов сети цифровой передачи данных с радиостанциями, установленными на локомотиве каждого поезда, при этом на каждом локомотиве выход приемника сигнала позиционирования подключен к первому входу вычислительного блока, второй вход которого подключен к первому выходу блока контрольно-измерительных средств локомотива, соединенного вторым выходом с первым входом блока моделирования динамических характеристик, второй вход которого подключен к соответствующему выходу блока памяти, связанного шиной данных с соответствующими входами/выходами вычислительного блока, выходы которого подключены соответственно к входам устройства управления локомотива и блока индикации, выход блока моделирования динамических характеристик соединен с первым входом блока сравнения, второй вход которого подключен к выходу формирователя предельно допустимых усилий поезда, а выход – через формирователь команд запрета управления режимами тяги и торможения соединен с соответствующими входами устройства управления локомотива, причем один их выходов блока идентификации поезда подключен к входу блока вычисления расстояния между поездами, одним из выходов связанного с соответствующим входом блока вычисления скорости сближения поездов (RU 87399 U1, B61C 9/00, 10.10.2009).
Недостатком известной системы является ограниченность функциональных возможностей, обусловленная отсутствием локальной радиосвязи между поездами по типу «точка-точка», возможности расчета на борту локомотива оптимальной скорости следования за ведущим поездом на основе прогнозной модели движения ведущего поезда с учетом возможных задержек у препятствий по маршруту следования в целях обеспечения ритмичности движения каждого последующего в пакете поезда, движущегося по технологии «виртуальной сцепки» (ВСЦ), что может приводить к колебаниям скорости движения ведомого поезда, удлинению или даже разрыву пакета, тем самым снижая пропускную способность участков железных дорог.
При организации ВСЦ на магистральных линиях группа попутно следующих поездов управляется как единый объект, части которого сцеплены не механически, а виртуально – при помощи радиоканала передачи данных (см., например, «Комплексная технология интервального регулирования движения поездов» / В.А. Воронин, И.Р. Гургенидзе, М.А. Дежков [и др.]. – Москва: АО "Т8 Издательские технологии", 2023 г. с.106 рис. 13.5 и с. 186).
Технология ВСЦ на магистральном железнодорожном транспорте имеет следующие особенности:
- ведомый поезд – это проекция (тень) движения первого поезда;
- прием поездов на ВСЦ на станцию и их обработка (смена локомотивов, локомотивных бригад) должны производиться параллельно (синхронно) друг с другом;
- прибытие поездов на ВСЦ считается по ведомому поезду;
- отправление поездов на ВСЦ должно производиться друг за другом и считается по ведущему поезду.
Технология вождения поездов по принципу виртуальной сцепки предлагается в первую очередь взамен существующей технологии вождения соединенных поездов на жесткой сцепке (ЖСЦ). По сравнению с вождением на ЖСЦ ВСЦ имеет ряд очевидных технологических преимуществ:
- уменьшение требуемой мощности инфраструктуры на технических станциях;
- отсутствие потребности в инвестициях для развития инфраструктуры технических станций смены локомотивных бригад;
- повышение скорости следования, поскольку снимаются ограничения, существующие для тяжеловесных поездов;
- сокращение затрат времени (до 0,9 – 1,2 ч) на объединение, разъединение поездов и на пробу тормозов;
- отсутствие потребности в наличия заключения обкатки локомотивных бригад для вождения на ЖСЦ;
- отсутствие регламентированных мест для объединения поездов (отсутствие уклонов и подъемов от 0,004 до 0,006%);
- увеличение пропускной способности участков в период предоставления «окон»;
- объединение двух поездов, без остановки поездов на перегоне (станции);
- при отсутствии каналов связи поезда могут следовать автономно.
Система автоведения ведомого поезда, зная параметры ведущего поезда и имея на борту электронную карту участка и получая информацию о поездной ситуации на своем локомотиве от устройства безопасности, может значительно эффективнее вести поезд, приближая фактическую скорость к предельно допустимой по условиям безопасности, а также имеет возможность прогнозировать изменение поездной ситуации и в ряде случаев наращивать скорость там, где ранее она снижалась.
В заявленном изобретении предлагается двухуровневая структура управления поездом с использованием рельсопроводных каналов связи (АЛСН и АЛС-ЕН) и радиоканала, что повышает уровень осведомленности бортовых систем автоведения о поездной ситуации и тем самым безопасность движения поездов в режиме ВСЦ. Высокий уровень автоматизации управления локомотивом и полная осведомленность локомотивной бригады о текущей поездной ситуации позволяет снижать запас скорости и приближать фактическую скорость поезда к допустимой.
В режиме ВСЦ движение поездов осуществляется на минимальном безопасном расстоянии с непрерывной оценкой эффективности работы тормозной системы ведущего и ведомого поездов. Управление рассчитывается для заданного участка движения на основании данных о составе поезда, профиле и плане пути, постоянных и временных ограничений скорости, текущих показаний локомотивного светофора и текущей скорости.
Технический результат заключается в сокращении интервала попутного следования и повышении пропускной способности участков железных дорог без изменения существующих систем железнодорожной автоматики.
Технический результат достигается тем, что система поддержания интервала разграничения между последовательно движущимися поездами содержит цифровую сеть технологической радиосвязи (ЦСТР), в которую входят базовые станции, каждая из которых через коммутатор соединена со стационарным вычислителем, подключенным к модулю электронных карт маршрутов поездов, а на каждом поезде, вовлеченном в систему, установлены локомотивное устройство безопасности, с подключенным к нему приемником сигналов АЛСН/АЛС-ЕН, и устройство автоведения, в состав которого входит соединенный с модулем электронной карты маршрута бортовой вычислитель, включающий модуль интеллектуальной поддержки ритмичности движения, обеспечивающий на основе полученной информации о режиме движения ведущего поезда и по данным электронной карты маршрута построение прогнозной модели движения ведущего поезда с учетом возможных задержек у препятствий по маршруту следования, на основании которой вычисляет оптимальную скорость следования за ведущим поездом и выбирает необходимое воздействие на тормозную систему и тягу для поддержания заданного безопасного интервала следования, локомотивное устройство безопасности и устройство автоведения соединены между собой и к ним подключены средства одометрии, приемник сигналов глобальной навигационной спутниковой системы (ГНСС) и модуль радиостанции DMR, соединенный с цифровой сетью технологической радиосвязи, выход устройства автоведения соединен с блоком индикации, а вход/выход соединен с выходом/входом модуля радиостанции локальной связи по типу соединения «точка-точка», выполненного с возможностью обеспечения обмена информацией по резервному локальному цифровому каналу с локомотивами других поездов и подключенного к модулю разделения тайм-слотов.
На борту локомотива устройство автоведения соединенное с локомотивным устройством безопасности контролирует текущую скорость поезда с учетом скорости, рассчитанной системой безопасности по показаниям сигналов АЛСН/АЛС-ЕН и на основании данных о местоположении поезда по информации от приемника сигналов ГНСС и средств одометрии. В случае ее превышения, локомотивное устройство безопасности срывает электропневматический клапан, что приводит к экстренному торможению поезда.
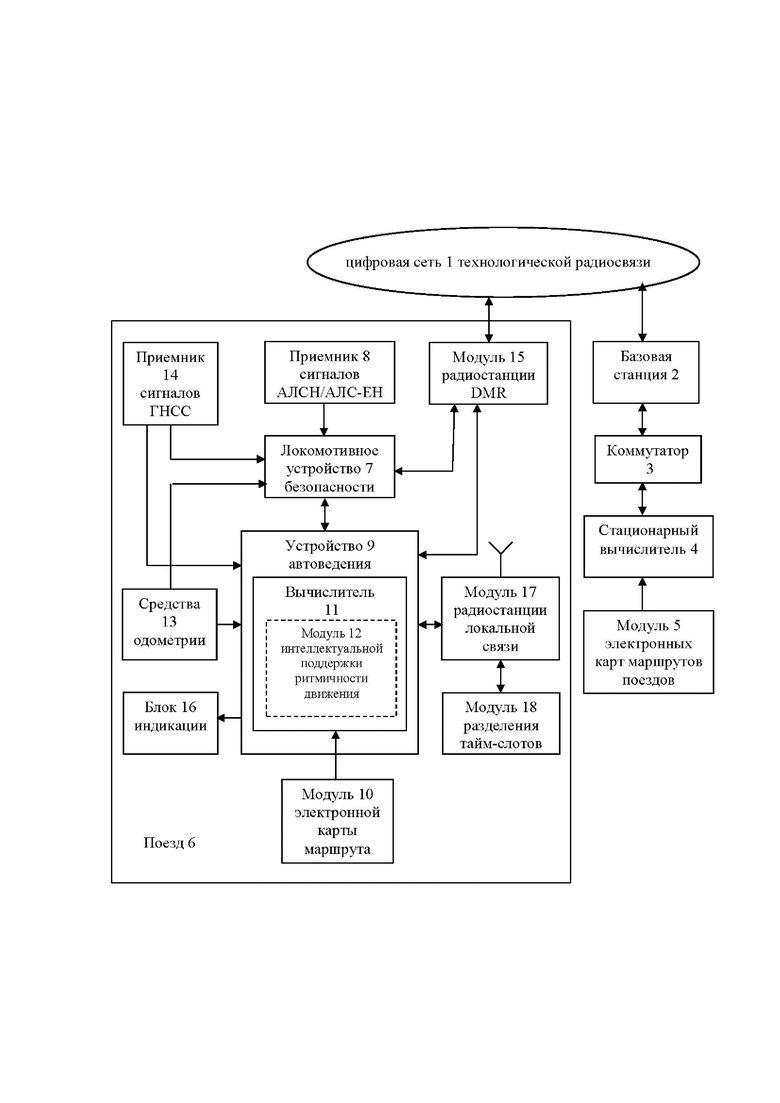
На чертеже приведена функциональная схема системы поддержания интервала разграничения между последовательно движущимися поездами.
Система поддержания интервала разграничения между последовательно движущимися поездами содержит цифровую сеть 1 технологической радиосвязи, в которую входят базовые станции 2, каждая из которых через коммутатор 3 соединена со стационарным вычислителем 4, подключенным к модулю 5 электронных карт маршрутов поездов, а на каждом поезде 6, вовлеченном в систему, установлены локомотивное устройство 7 безопасности, с подключенным к нему приемником 8 сигналов АЛСН/АЛС-ЕН, и устройство 9 автоведения, в состав которого входит соединенный с модулем 10 электронной карты маршрута бортовой вычислитель 11, включающий модуль 12 интеллектуальной поддержки ритмичности движения, обеспечивающий на основе полученной информации о режиме движения ведущего поезда и по данным электронной карты маршрута построение прогнозной модели движения ведущего поезда с учетом возможных задержек у препятствий по маршруту следования, на основании которой вычисляет оптимальную скорость следования за ведущим поездом и выбирает необходимое воздействие на тормозную систему и тягу для поддержания заданного безопасного интервала следования, локомотивное устройство 7 безопасности и устройство 9 автоведения соединены между собой и к ним подключены средства 13 одометрии, приемник 14 сигналов ГНСС и модуль 15 радиостанции DMR, соединенный с цифровой сетью 1 технологической радиосвязи, выход устройства 9 автоведения соединен с блоком 16 индикации, а вход/выход соединен с выходом/входом модуля 17 радиостанции локальной связи по типу соединения «точка-точка», выполненного с возможностью обеспечения обмена информацией по резервному локальному цифровому каналу с локомотивами других поездов и подключенного к модулю 18 разделения тайм-слотов.
Система поддержания интервала разграничения между последовательно движущимися поездами функционирует следующим образом.
Система обеспечивает в автоматическом режиме одновременное позиционирование некоторого заданного числа локомотивов на основе данных приемников 14 сигналов ГНСС, а также автоматическую регистрацию координат местоположения каждого локомотива с привязкой к шкале единого времени.
Данные, воспринимаемые приемником 14 сигналов ГНСС передаются в локомотивное устройство 7 безопасности и в бортовой вычислитель 11 устройства 9 автоведения соответствующего локомотива, где осуществляется их обработка, при этом уточнение местоположения локомотива поезда осуществляется с помощью средств 13 одометрии, путем сопоставления пройденного пути с данными электронной карты маршрута. Перед началом движения машинист локомотива вводит в бортовой вычислитель 11 устройства 9 автоведения информацию о составе и длине поезда. На основании данных о местоположении локомотива поезда от приемника 14 сигналов ГНСС, средств 13 одометрии и введенной машинистом информации о длине поезда бортовой вычислитель 11 устройства 9 автоведения рассчитывает местоположение последнего вагона поезда. Обработанная бортовым вычислителем 11 устройства 9 автоведения информация о режиме и параметрах движения, дополненная информацией от локомотивного устройства 7 безопасности о показании сигналов АЛСН/АЛС-ЕН, поступает в модуль 15 радиостанции DMR и далее передается по сети 1 ЦСТР через коммутатор 3 радиосети, подключенный к сети базовых станций 2, в стационарный вычислитель 4. Коммутатор 3 выполняет функцию коммутации цифровых радиоканалов в цифровой радиосети 1 и передачи привязанных к железнодорожным координатам данных позиционирования поездов на локомотив и в стационарный вычислитель 4.
Поступающая от модуля 15 радиостанции DMR в стационарный вычислитель 4 информация о местонахождении локомотивов, их режимах движения, показаниях АЛСН/АЛС-ЕН, маршруте следования, скорости и параметрах тормозной системы обрабатывается с привязкой к электронной карте маршрута, записанной в модуле 5, подключенным к стационарному вычислителю 4, в котором осуществляется распределение поездов и их локомотивов по пути следования. Стационарный вычислитель 4 рассчитывает расстояние между поездами и определяет роли каждого поезда в виртуальной сцепке и по сети 1 ЦСТР передает информацию на модули 15 радиостанций локомотивов, от которых информация поступает в устройство 9 автоведения. Модуль 12 интеллектуальной поддержки ритмичности движения устройства 9 автоведения, на основе полученной информации о режиме движения ведущего поезда и по данным электронной карты маршрута строит прогнозную модель движения ведущего поезда с учетом возможных задержек у препятствий по маршруту следования, на основании которой в каждый момент вычисляет оптимальную скорость следования за ведущим поездом и выбирает необходимое воздействие на тормозную систему и тягу для поддержания заданного безопасного интервала следования. Закон управления реализуется ПИД-регулятором, моделирующим преобразованием рассогласование в управление согласно модели (см. «Принципы построения и модели системы автоматического управления вторым локомотивом при виртуальной сцепке» / Л.А. Баранов, П.Ф. Бестемьянов, Е.П. Балакина, О.Е. Пудовиков // Автоматика на транспорте. – 2022. – Т. 8, № 4. – С. 384-386). Предусмотренные алгоритмы интеллектуальной поддержки ритмичности движения позволяют минимизировать колебания скоростей движения ведомых поездов в пакете ВСЦ.
Информация о номере ведущего поезда, скорости сближения локомотива с ведущим поездом и расстоянии между локомотивом и последним вагоном ведущего поезда из бортового вычислителя 11 устройства 9 автоведения поступает на блок 16 индикации, обеспечивая непрерывный контроль машинистом поездной ситуации и повышая безопасность движения поездов.
Для повышения надежности радиосвязи, например, в целях защиты от потерь данных радиостанции 15 от базовой станции 2 по сети 1 ЦСТР между каждым ведущим и ведомым поездом, которые виртуально сцеплены по технологии ВСЦ, в предлагаемой системе предусмотрена дублирующая радиосвязь по локальным цифровым радиоканалам. Эта связь осуществляется модулями 17 радиостанций локальной связи по типу соединения «точка-точка» в диапазоне 160 МГц или 2 МГц. Для возможности временного разделения времени вещания радио абонентов на заданной частоте устанавливается модуль 18 разделения тайм-слотов. В момент включения модуль 18 распределения тайм-слотов слушает радиоэфир и выбирает тайм-слот, где отсутствует вещание. Информационные посылки посылаются в выбранный тайм-слот, причем периодически модуль 18 слушает радиоэфир в собственный тайм-слот для исключения наложения информации от других абонентов.
В результате применения предлагаемого изобретения повышается ритмичность продвижения поездопотока на участках с ВСЦ и, соответственно, в сравнении с прототипом, сокращается интервал попутного следования поездов и повышается пропускная способность участков железных дорог без изменения напольной инфраструктуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Система управления движением поездов, следующих по технологии "виртуальная сцепка" | 2024 |
|
RU2839169C1 |
| Способ интервального регулирования движения поездов | 2024 |
|
RU2832521C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| Система управления движением поездов | 2021 |
|
RU2753988C1 |
Изобретение относится к управлению движением на железных дорогах. Система поддержания интервала разграничения между последовательно движущимися поездами содержит цифровую сеть технологической радиосвязи, в которую входят базовые станции, каждая из которых через коммутатор соединена со стационарным вычислителем, подключенным к модулю электронных карт маршрутов поездов, а на каждом поезде, вовлеченном в систему, установлены локомотивное устройство безопасности, приемник сигналов АЛСН/АЛС-ЕН, устройство автоведения, средства одометрии, приемник сигналов ГНСС, модуль радиостанции DMR, соединенный с цифровой сетью технологической радиосвязи, блок индикации и модуль радиостанции локальной связи по типу соединения «точка-точка», подключенный к модулю разделения тайм-слотов. В состав устройства автоведения входит соединенный с модулем электронной карты маршрута бортовой вычислитель, включающий модуль интеллектуальной поддержки ритмичности движения, обеспечивающий построение прогнозной модели движения ведущего поезда с учетом возможных задержек у препятствий по маршруту следования, на основании которой вычисляет оптимальную скорость следования за ведущим поездом. Технический результат заключается в сокращении интервала попутного следования и повышении пропускной способности участков железных дорог. 1 ил.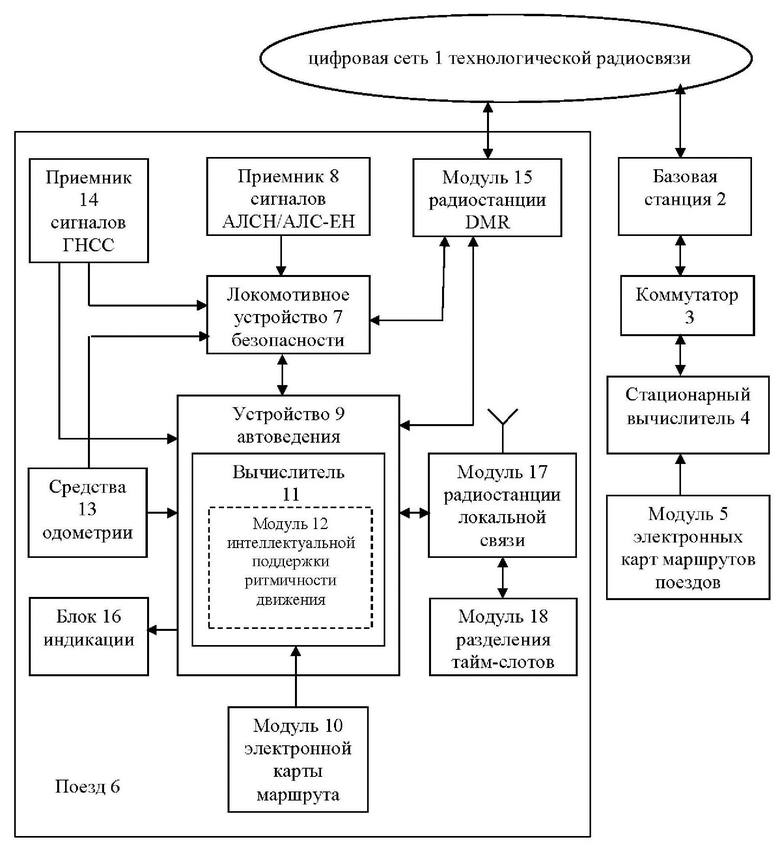
Система поддержания интервала разграничения между последовательно движущимися поездами, содержащая цифровую сеть технологической радиосвязи, в которую входят базовые станции, каждая из которых через коммутатор соединена со стационарным вычислителем, подключенным к модулю электронных карт маршрутов поездов, а на каждом поезде, вовлеченном в систему, установлены локомотивное устройство безопасности, с подключенным к нему приемником сигналов АЛСН/АЛС-ЕН, и устройство автоведения, в состав которого входит соединенный с модулем электронной карты маршрута бортовой вычислитель, включающий модуль интеллектуальной поддержки ритмичности движения, обеспечивающий на основе полученной информации о режиме движения ведущего поезда и по данным электронной карты маршрута построение прогнозной модели движения ведущего поезда с учетом возможных задержек у препятствий по маршруту следования, на основании которой вычисляет оптимальную скорость следования за ведущим поездом и выбирает необходимое воздействие на тормозную систему и тягу для поддержания заданного безопасного интервала следования, локомотивное устройство безопасности и устройство автоведения соединены между собой и к ним подключены средства одометрии, приемник сигналов ГНСС и модуль радиостанции DMR, соединенный с цифровой сетью технологической радиосвязи, выход устройства автоведения соединен с блоком индикации, а вход/выход соединен с выходом/входом модуля радиостанции локальной связи по типу соединения «точка-точка», выполненного с возможностью обеспечения обмена информацией по резервному локальному цифровому каналу с локомотивами других поездов и подключенного к модулю разделения тайм-слотов.
| СИСТЕМА ДЛЯ КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ СЛЕДУЮЩИМИ ДРУГ ЗА ДРУГОМ ПОЕЗДАМИ НА ОСНОВЕ ЦИФРОВОЙ РАДИОСВЯЗИ | 2015 |
|
RU2578646C1 |
| Устройство для стабилизации падающей вольтамперной характеристики газоразрядного прибора | 1948 |
|
SU87399A1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| CN 108667465 A, 16.10.2018. | |||

