Группа изобретений относится к области геофизики и может быть использована для оказания сервисных геофизических услуг в области недропользования - поиска, разведки и добычи углеводородного сырья, других полезных ископаемых, а также при проведении инженерно-геологических и гидрогеологических исследованиях.
На дату представления заявочных материалов в исследованной заявителем области техники существуют проблемы, связанные с планированием и проведением сейсморазведочных работ, а именно со снижением антропогенного воздействия на окружающую среду, повышением уровня промышленной безопасности, снижением рисков травматизма, связанных с уменьшением объемов рубки леса, сокращением сроков полевых работ, повышением эффективности и рентабельности полевых работ.Также в качестве проблем можно выделить низкую оперативность топогеодезического сопровождения сейсмических работ, низкое разрешение получаемых карт рельефа, слабый учет ландшафтных особенностей исследуемых площадей, слабую разработку методик, позволяющих получать оперативную информацию о строении верхней части разреза, низкую эффективность методов экспресс-контроля соответствия проводимых работ техническому заданию.
Далее в тексте заявителем приведены термины, которые необходимы для облегчения однозначного понимания сущности заявленных материалов и исключения противоречий и/или спорных трактовок при выполнении экспертизы по существу.
Полезная нагрузка - набор блоков, содержащих датчики и спецоборудование, находящиеся на борту беспилотного воздушного судна (БВС).
Ортофотоплан - цифровое трансформированное изображение местности, созданное по перекрывающимся исходным фотоснимкам.
Цифровая модель местности (ЦММ) - топографическая модель, которая характеризует и ситуацию, и рельеф местности.
Цифровая модель рельефа (ЦМР) - топографическая модель, которая характеризует только рельеф местности.
Сейсмическая система наблюдения - геометрическое расположение источников и приемников упругих колебаний на поверхности земли.
Паспорт снимка (полученного с помощью фотокамеры высокого разрешения или мультиспектральной камеры с тепловым ИК-каналом) - текстовый файл, содержащий информацию о координатах центра и границах снимка.
Модульность полезной нагрузки - свойство заявленного устройства, связанное с возможностю выбора комплекта установленных датчиков в составе полезной нагрузки в зависимости от решаемых задач.
Современные комплексы на основе беспилотных воздушных судов (БВС), как правило, направлены на решение отдельных узкоспециализированных задач, применение нескольких БВС для решения частных проблем приводит к резкому удорожанию работ.
Основываясь на вышеизложенном, можно сделать вывод, что существует насущная потребность в разработке новых технологий, способных решать указанные проблемы и противоречия посредством применения неочевидных для специалистов способов, с применением специально разработанных устройств и автоматизированных аппаратно-программных комплексов. Решение указанных проблем позволит значительно сократить время планирования и увеличить эффективность сейсморазведочных работ.
Далее заявителем представлены аналоги, выявленные в процессе изучения данной области техники.
Известно изобретение по патенту RU 2673505 «Способ аэрогаммаспектрометрической съемки геологического назначения», сущностью является способ аэрогаммаспектрометрической съемки геологического назначения, включающий измерение потока радиоактивного излучения с помощью детектора, который установлен на летательном аппарате, отличающийся тем, что в качестве летательного аппарата используется беспилотный летательный аппарат (БПЛА), при этом съемка производится при движении БПЛА на автопилоте по предварительно подготовленному и соответствующему постоянной высоте БПЛА над рельефом (от 3 метров) полетному заданию, скорость движения БПЛА может изменяться от 0 (для набора гамма-спектра с большей экспозицией) до 20 м/с, при этом измерения потока радиоактивного излучения производятся по линиям U, Th, K40, а также интегральной интенсивности гамма-излучения (радиометрический канал), непрерывно в автоматическом режиме, при этом съемка сопровождается мультиспектральной фотографической съемкой, обеспечивающей оценку биомассы растительности для внесения соответствующей поправки в результаты измерений, а пространственная привязка точек измерений осуществляется средствами спутниковой навигационной системы. Способ по п.1, отличающийся тем, что при съемке для оценки биомассы растительности используется лидарный (лазерный) сканер. Способ по п.1, отличающийся тем, что данные измерений в интегральном канале («счеты») передаются по радиоканалу на наземную станцию оператора вместе с данными телеметрии БПЛА, в результате чего при обнаружении аномалии оператор имеет возможность на время остановить полет БПЛА («зависнуть») для накопления спектров в точке и точного расчета изотопных отношений и концентраций U, Th, K40. Способ по п.1, отличающийся тем, что при съемке применяется система кинематики реального времени. Способ по п.1, отличающийся тем, что гамма-спектрометр оснащен детектором из CsI, или из NaI, или из сцинтилляционной пластмассы, или германия, или кремния. Способ по п.1, отличающийся тем, что биомассу растительности оценивают по внешним источникам мультиспектральной информации: космической или аэросъемки, приходящейся на тот же момент времени.
Более детально известный способ включает в себя аэрогаммаспектрометрическую съемку геологического назначения, в которой в качестве летательного аппарата используется беспилотный летательный аппарат (БПЛА), при этом съемка производится при движении на автопилоте по предварительно подготовленному полетному заданию при постоянной высоте над рельефом (от 3 метров). Скорость движения может изменяться от 0 до 20 м/с.Измерения потока радиоактивного излучения U, Th, K40, а также интегральной интенсивности гамма-излучения производится непрерывно в автоматическом режиме. Помимо этого, съемка сопровождается мультиспектральной фотографической съемкой, обеспечивающей оценку биомассы растительности для внесения соответствующей поправки в результаты измерений. Пространственная привязка точек измерений осуществляется средствами спутниковой навигационной системы. Техническим результатом способа является повышение точности, детальности, информативности и достоверности аэрогаммаспектрометрической съемки.
Недостатком известного технического решения в отношении способа является то, что его невозможно использовать с целью планирования и сопровождения сейсморазведочных работ в связи с узкой специализацией, направленной исключительно на проведение гамма-спектрометрической съемки. Такая узкая специализация не позволяет говорить о многофункциональности способа. Недостатком в отношении устройства является отсутствие в составе полезной нагрузки датчиков магнитного поля, что не позволяет в полной мере решить заявленные задачи.
Известно изобретение по патенту №US20080125920 Al «Беспилотный летательный аппарат для геофизических исследований способ использования беспилотного летательного аппарата для геофизической съемки» («Unmanned airborne vehicle for geophysical surveying»). Сущностью является беспилотный летательный аппарат для геофизического наблюдения за территорией, включающий в себя навигационную систему, приспособленную для хранения множества путевых точек, которые необходимо пересечь, при этом транспортное средство содержит: первый магнитометр, ориентированный на обнаружение и измерение магнитных аномалий в этом районе; второй магнитометр для измерения магнитного отклика, соответствующего тангажу, рысканью и крену транспортного средства; систему сбора данных, оперативно связанную с первым и вторым магнитометрами, для хранения измерений магнитных аномалий и магнитного отклика, соответствующих измерениям тангажа, рыскания и крена, и для удаления измерений магнитного отклика из измерений магнитных аномалий; а также система сбора данных, поддерживающая в нем план полета транспортного средства, последовательно перечисляющий серию координат и адаптированная для передачи по меньшей мере одной координаты в навигационную систему для обновления множества путевых точек.
Преимущества известного изобретения заключаются в том, что оно снижает как затраты на получение данных геофизических исследований, так и риск для летного состава; оно полностью автономно (в том числе во время полетов в открытом море) и способно хранить большие файлы планов полетов. Беспилотный летательный аппарат является мобильным и может использоваться совместно с переносной системой запуска и восстановления.
Недостатком известного изобретения в отношении способа является узкая направленность решаемых задач, направленных на получение информации исключительно по исследуемому (магнитному) полю, что исключает многофункциональность изобретения. Недостатком является также то, что известное изобретение не решает задачи планирования и сопровождения сейсморазведочных работ.Недостатком известного изобретения в отношении устройства является отсутствие гамма-спектрометров в составе полезной нагрузки, а также отсутствие набора оптико-спектральных датчиков, что не позволяет провести комплексную оценку влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ.
Известно изобретение по патенту №US20160003954 A1 «Сбор сейсмических данных с помощью летательного аппарата» («Aerial vehicle acquisition of seismic data»). Сущностью является способ включает в себя получение сейсмических данных используя воздушное судно (дрон). Каждый беспилотный летательный аппарат оснащен сейсмическим датчиком и передатчиком. Дроны летают по заранее определенной схеме и собирают необходимые измерения, которые отправляются на ноутбук исследователя. Способ получения сейсмических данных включает в себя получение информации о местоположении на воздушном средстве, включая сейсмический датчик, навигацию воздушного судна к местоположению на основе информации о местоположении, включение сейсмического датчика, получение сейсмических данных сейсмическим датчиком и передача сейсмических данных, полученных с сейсмического датчика на устройство управления.
Недостатком известного изобретения в отношении устройства является то, что известное изобретение не подразумевает планирование сейсморазведочных работ в связи с отсутствием датчиков магнитного поля и гамма-спектрометров.
Известна полезная модель RU 172078 «Комплекс для беспилотной аэромагниторазведки», сущностью является комплекс для беспилотной аэромагниторазведки, состоящий из беспилотного летательного аппарата, имеющего шасси, и прикрепленного к нему магнитометра, отличающийся тем, что в качестве беспилотного летательного аппарата используется мультироторный летательный аппарат, состоящий из рамы с лучами, к которой прикреплены двигатели с винтами, регуляторы вращения двигателей, аккумуляторная батарея, полетный контроллер с GPS-антенной и магнитометр, при этом магнитометр прикреплен к раме с применением виброгасящей прослойки и состоит из блока управления, включающего магнитоизмерительный преобразователь и контроллер магнитометра, складного подвеса и выносного датчика, причем датчик жестко присоединен к концу складного подвеса, а другим концом подвес прикреплен к блоку управления, кроме того, датчик соединен с блоком управления кабелем. Комплекс по п.1, отличающийся тем, что мультироторный беспилотный летательный аппарат имеет 4-8 двигателей. Комплекс по п.1, отличающийся тем, что рама, подвес, лучи, шасси выполнены из немагнитного материала. Комплекс по п.1, отличающийся тем, что подвес выполнен телескопическим. Комплекс по п.1, отличающийся тем, что подвес выполнен жестким. Комплекс по п.1, отличающийся тем, что подвес выполнен эластичным. Комплекс по п.1, отличающийся тем, что подвес и кабель объединены.
Недостатками известной полезной модели является отсутствие других элементов полезной нагрузки - регистратора гамма-излучения, блока оптико-спектральных датчиков зондирования, что не дает возможности в полной мере оценить состав верхней части разреза.
Известна полезная модель RU 173640 U1 «Беспилотный аэромагнитный комплекс коптерного типа», сущностью является беспилотный аэромагнитный комплекс коптерного типа, включающий для измерения модуля полного вектора магнитной индукции магниточувствительный датчик, отличающийся тем, что магниточувствительный датчик, датчик GPS, стабилизатор, измерительный блок расположены на выпускном диске, подвешенном на тросе. Беспилотный аэромагнитный комплекс коптерного типа по п.1, отличающийся тем, что в качестве БПЛА использован аппарат роторного типа со взлетной массой - от 7 до 10 кг, радиусом действия 10-15 км, рабочей высотой 10-200 м, выпускной диск и подвешенный трос выполнены из немагнитных материалов.
Технический результат известной полезной модели - высокоточная магнитометрическая и топогеодезическая съемка с использованием беспилотного комплекса дистанционного мониторинга для построения карт масштабом 1:2000 с точностью измерения модуля полного вектора магнитной индукции до ±0,5 нТл с последующей привязкой карт по данным GPS.
Недостатками известной полезной модели является отсутствие других элементов полезной нагрузки (регистратор гамма-излучения, блока оптико-спектральных датчиков зондирования), что не дает возможности оценить состав верхней части разреза.
На дату подачи настоящей заявки заявителем из исследованного уровня техники не выявлены технические решения по совместным многопараметрическим съемкам с высокой степенью совместной координатной привязки, включающим в себя лазерное сканирование, магнитную, гамма, оптическую в видимой и ИК областях виды съемок, при которых использовалось беспилотное воздушное судно (БВС).
Техническим результатом заявленного технического решения является разработка способа многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункционального аппаратно-программного комплекса для его реализации, использование которых позволяет достигнуть по сравнению с известными аналогами:
- возможность комплексной оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ вследствие расширенной компоновки блоков полезной нагрузки;
- многофукнциональность заявленного комплекса вследствие модульности полезной нагрузки;
- высокая степень совместной координатной привязки данных, полученных с помощью разных датчиков блоков полезной нагрузки, вследствие введения в состав заявленного устройства блока синхронизации и высокоточного позиционирования (БСВП).
При этом заявитель поясняет, что, по предварительной оценке, себестоимость проведения геофизических работ при использовании заявленного способа и заявленного комплекса может снизиться от 10 до 50% за счет многофункциональности заявленного комплекса, что может привести к экономическому эффекту порядка 100-150 млн. рублей в год.
Сущностью заявленного технического решения является способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ, заключающийся в том, что создают полетное задание и выбор точки взлета и приземления беспилотного воздушного судна; далее исходя из поставленных задач, выбирают состав и компоновку датчиков полезной нагрузки из ряда: магнитометр, регистратор гамма-излучения, лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом, но не менее одного; на выбранной точке устанавливают: наземную рабочую станцию с прикладным программным обеспечением, наземную часть подсистемы передачи данных, наземную часть блока синхронизации и высокоточного позиционирования; далее снаряжают беспилотное воздушное судно, для чего производят установку на него полезной нагрузки из ряда: магнитометр, регистратор гамма-излучения, лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом, но не менее одного, а также бортовых частей блока синхронизации и высокоточного позиционирования и подсистемы передачи данных; далее полезную нагрузку подключают к бортовой сети питания беспилотного воздушного судна через бортовой компьютер в составе бортовой части подсистемы передачи данных путем использования платы с установленной на ней программой для ЭВМ; далее производят запуск беспилотного воздушного судна, при этом запускают прикладное программное обеспечение, установленное на наземной рабочей станции; после взлета беспилотного воздушного судна определяют исходные координаты его положения и далее с помощью прикладного программного обеспечения и блока синхронизации и высокоточного позиционирования осуществляют контроль фактического маршрута беспилотного воздушного судна и его отклонение от планируемого путем непрерывного определения координат беспилотного воздушного судна; после прилета беспилотного воздушного судна на первую точку территории исследования подают через бортовой компьютер подсистемы передачи данных с помощью прикладного программного обеспечения команду датчикам полезной нагрузки на начало процесса съемки, при этом: в случае наличии в составе полезной нагрузки фотокамеры высокого разрешения и/или мультиспектральной камеры с тепловым ИК-каналом, бортовым компьютером генерируется паспорт каждого снимка, который передается через подсистему передачи данных на наземную рабочую станцию в режиме реального времени, параллельно паспорт каждого снимка дублируется в носитель памяти бортовой части подсистемы передачи данных с помощью программного обеспечения для дублирования паспорта каждого снимка и показаний датчиков в носитель памяти бортовой части подсистемы передачи данных; в случае наличии в составе полезной нагрузки магнитометра и/или регистратора гамма-излучения, показания указанных датчиков передаются на наземную рабочую станцию через подсистему передачи данных в режиме реального времени, параллельно показания дублируются в носитель памяти бортовой части подсистемы передачи данных с помощью программного обеспечения для дублирования паспорта каждого снимка и показаний датчиков в носитель памяти бортовой части подсистемы передачи данных; после окончания полетного задания датчикам полезной нагрузки подают команду на остановку записи, беспилотное воздушное судно осуществляет посадку в точке посадки, после чего отключают бортовое питание; далее передают на наземную рабочую станцию носитель памяти бортовой части подсистемы передачи данных с показаниями датчиков и снимками с камер полезной нагрузки; полученные с носителя памяти бортовой части подсистемы передачи данных данные обрабатывают с помощью прикладного программного обеспечения, при этом получают информацию о территории исследования для планирования и сопровождения сейсморазведочных работ. Многофункциональный аппаратно-программный комплекс для реализации способа по п.1, содержащий: беспилотное воздушное судно; блок синхронизации и высокоточного позиционирования, включающий бортовую и наземную части, с возможностью пространственно-угловой привязки положения беспилотного воздушного судна; подсистему передачи данных, включающую бортовую и наземную части, с возможностью высокоскоростной передачи данных с беспилотного воздушного судна, при этом в состав бортовой части подсистемы передачи данных входит бортовой компьютер с возможностью обеспечения работы автопилота беспилотного воздушного судна и полезной нагрузки; блок геофизических датчиков в составе полезной нагрузки с возможностью регистрации физических полей на территории исследования, включающий магнитометр, и регистратор гамма-излучения; блок оптико-спектральных датчиков зондирования в составе полезной нагрузки, с возможностью проведения спектрального зондирования поверхности Земли и аэрофотосъемки, включающий лазерный сканер, фотокамеру высокого разрешения, мультиспектральную камеру с тепловым ИК-каналом; наземная рабочая станция с прикладным программным обеспечением, с возможностью управления многофункциональным аппаратно-программным комплексом; при этом узлы многофункционального аппаратно-программного комплекса связаны между собой следующим образом: бортовые части блока синхронизации и высокоточного позиционирования и подсистемы передачи данных, а также регистратор гамма-излучения блока геофизических датчиков и лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом блока оптико-спектральных датчиков зондирования подсоединены к системе крепления беспилотного воздушного судна, магнитометр блока геофизических датчиков закреплен механически на расстоянии от беспилотного воздушного судна, исключающем влияние собственного магнитного поля силовой системы беспилотного воздушного судна на показания; при этом бортовая часть блока синхронизации и высокоточного позиционирования, регистратор гамма-излучения, лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом и магнитометр присоединены к бортовому компьютеру кабельным соединением; наземная часть блока синхронизации и высокоточного позиционирования соединена с бортовой частью блока синхронизации и высокоточного позиционирования посредством радиоканала; наземная часть подсистемы передачи данных соединена с бортовой частью подсистемы передачи данных посредством радиоканала, наземная рабочая станция присоединена к наземной части подсистемы передачи данных посредством кабельного соединения.
Заявленное техническое решение иллюстрируется Фиг. 1 - Фиг. 7.
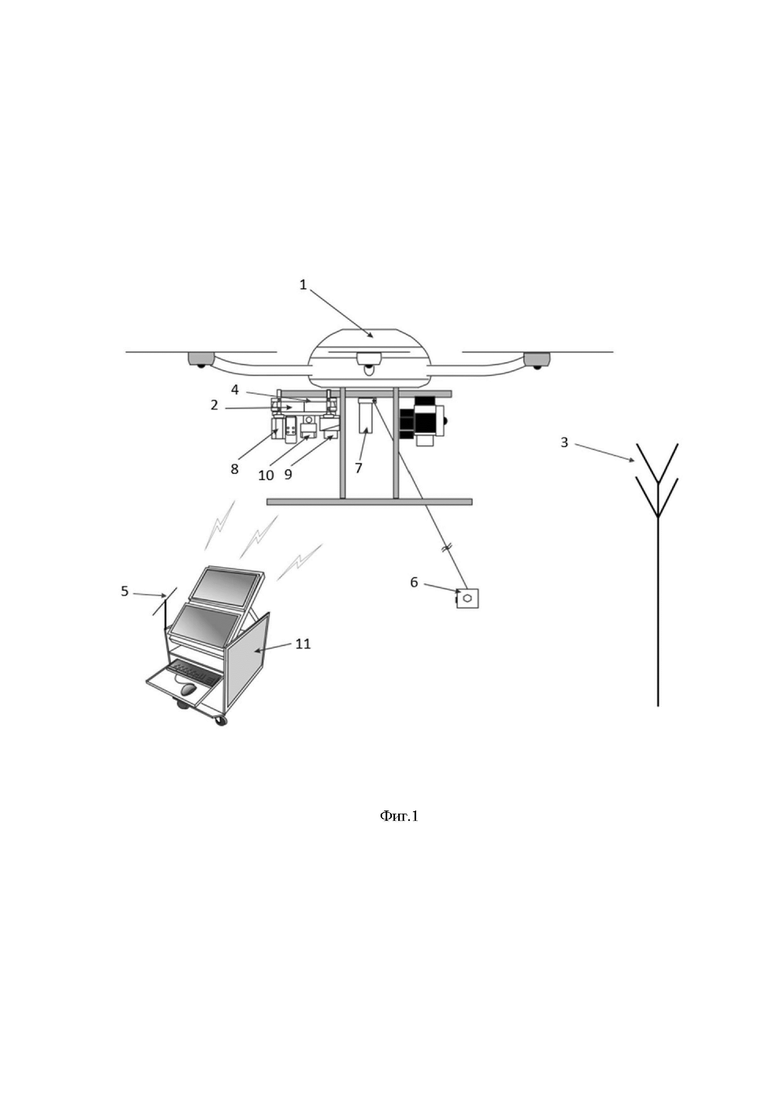
На Фиг. 1 представлен заявленный многофункциональный аппаратно-программный комплекс на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ (АПКС), где:
1 - беспилотное воздушное судно (БВС), предназначенное для перемещения блоков полезной нагрузки (блока геофизических датчиков и блока оптико-спектральных датчиков зондирования);
2 - бортовая часть блока синхронизации и высокоточного позиционирования (БСВП), предназначенного для пространственно-угловой привязки положения БВС;
3 - наземная часть блока синхронизации и высокоточного позиционирования (БСВП), предназначенного для пространственно-угловой привязки положения БВС;
4 - бортовая часть подсистемы передачи данных (ППД), предназначенной для высокоскоростной передачи данных с БВС;
5 - наземная часть подсистемы передачи данных (ППД), предназначенной для высокоскоростной передачи данных с БВС;
6 - магнитометр блока геофизических датчиков;
7 - регистратор гамма-излучения блока геофизических датчиков;
8 - лазерный сканер блока оптико-спектральных датчиков зондирования;
9 - фотокамера высокого разрешения блока оптико-спектральных датчиков зондирования;
10 - мультиспектральная камера с тепловым ИК-каналом блока оптико-спектральных датчиков зондирования;
11 - наземная рабочая станция.
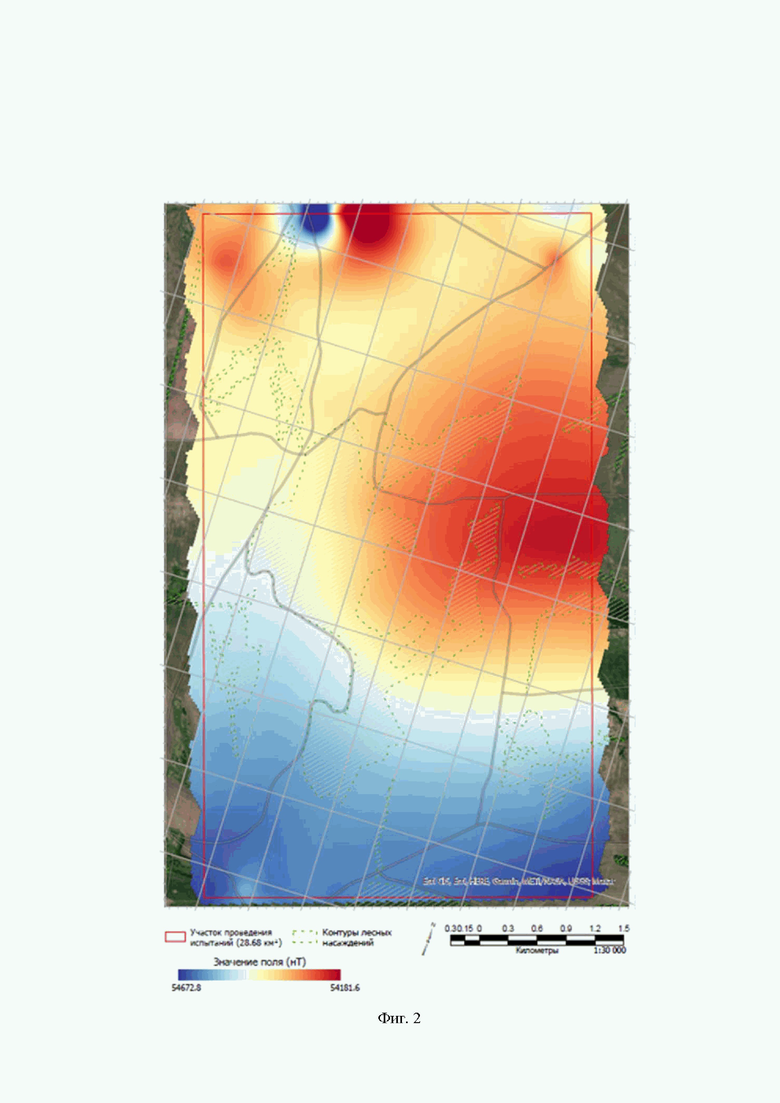
На Фиг. 2 представлена карта наблюденного магнитного поля для территории исследования, зарегистрированного на высоте полета 100 м над поверхностью земли. Карта построена по результатам магнитной съемки, проведенной с помощью магнитометра 6 блока геофизических датчиков.
На Фиг. 3 представлена карта естественной радиоактивности для территории исследования, зарегистрированной на высоте полета 100 м над поверхностью земли. Карта построена по результатам аэрогаммасъемки, проведенной с помощью регистратора гамма-излучения 7 блока геофизических датчиков.
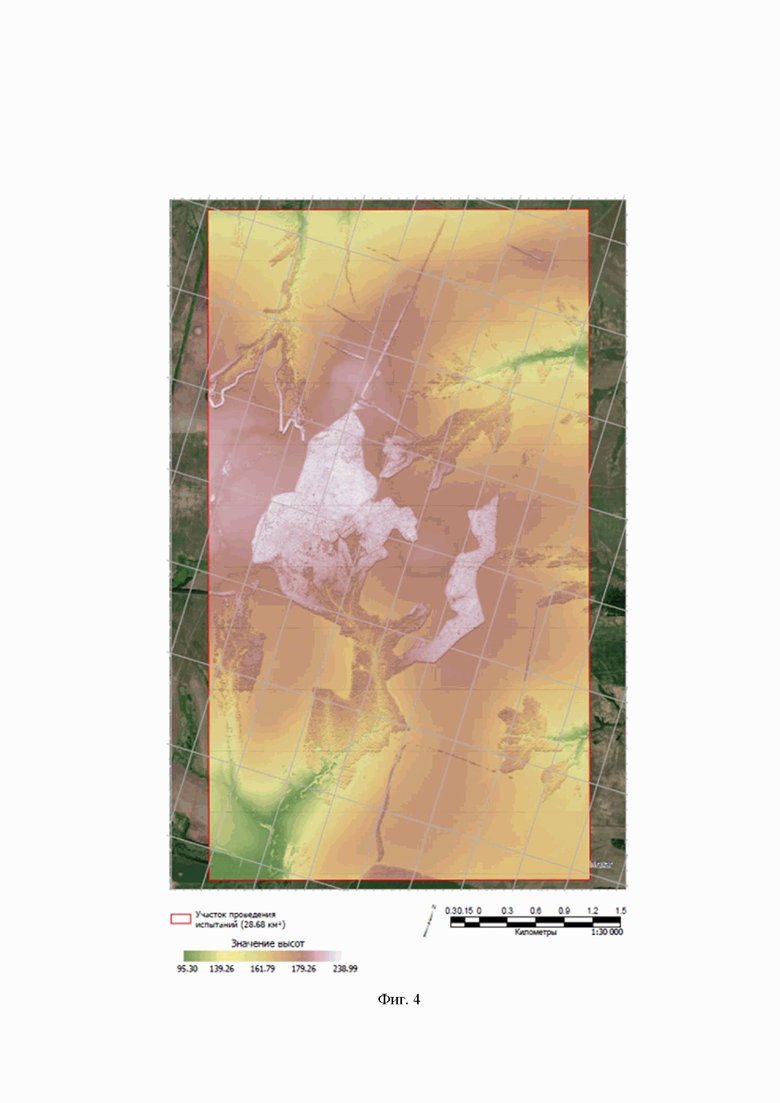
На Фиг. 4 представлена цифровая модель местности (ЦММ) для территории исследования, полученная в результате съемки с помощью лазерного сканера 8 блока оптико-спектральных датчиков зондирования.
На Фиг. 5 представлен ортофотоплан для территории исследования, полученный в результате аэрофотосъемки, проведенной с помощью фотокамеры высокого разрешения 9 блока оптико-спектральных датчиков зондирования.
На Фиг. 6 представлена карта распределения нормализованного вегетационного индекса (NDVI-индекса) для территории исследования, рассчитанного по результатам аэрофотосъемки, проведенной с помощью мультиспектральной камеры с тепловым ИК-каналом 10 блока оптико-спектральных датчиков зондирования.
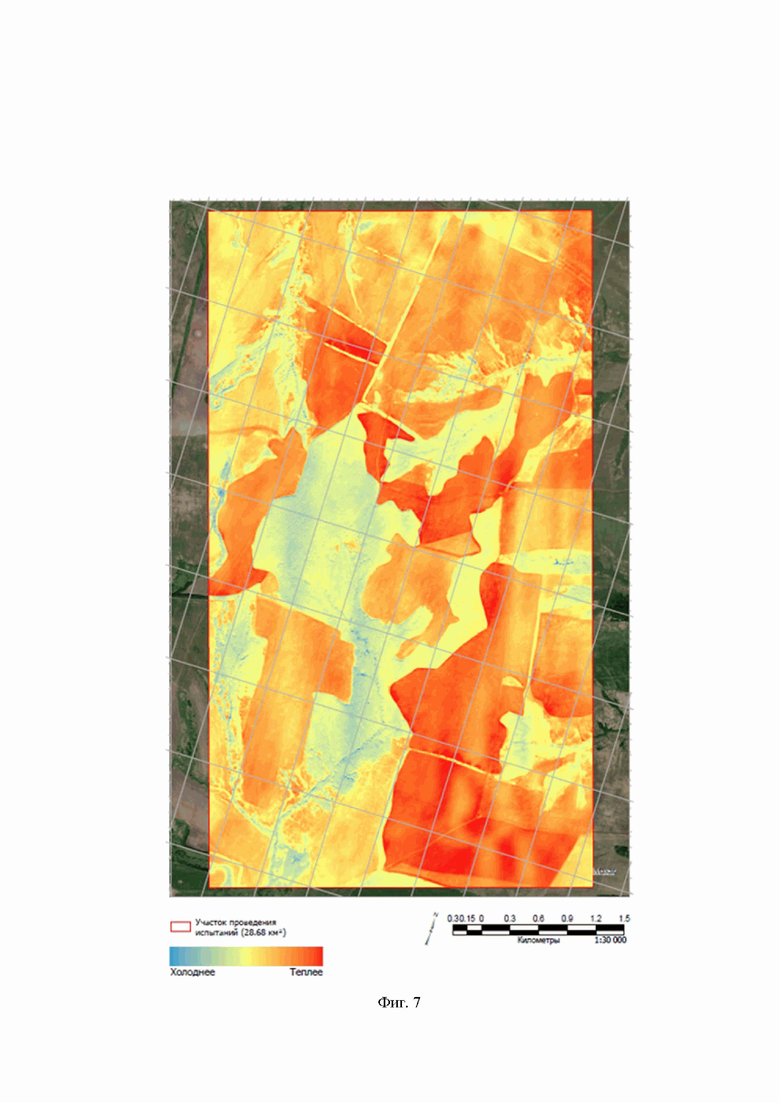
На Фиг. 7 представлена карта распределения значений собственного теплового излучения объектов в дальнем инфракрасном свете для территории исследования. Карта получена в результате обработке теплового ИК-канала мультиспектральной камеры с тепловым ИК-каналом 10 блока оптико-спектральных датчиков зондирования.
Далее заявителем приведено описание заявленного технического решения.
Описание заявленного многофункционального аппаратно-программного комплекса на основе беспилотных воздушных судов (АПКС).
Заявленный многофункциональный аппаратно-программный комплекс на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ (АПКС) позволяет изучить свойства верхней части разреза, которые необходимы при планировании и проведении сейсморазведочных работ, а также при выполнении обработки полевого материала.
АПКС представляет собой в целом систему, состоящую из нескольких взаимосвязанных и работающих в заданной последовательности систем, узлов и агрегатов, совместное применение которых позволяет проводить многопараметрические съемки (магнитная, гамма, оптическая в видимой, инфракрасной, ультрафилетовой, лазерное сканирование) с высокой степенью совместной координатной привязки.
В состав АПКС в целом входят (Фиг.1):
- беспилотное воздушное судно (БВС) 1, предназначенное для перемещения блоков полезной нагрузки;
- блок синхронизации и высокоточного позиционирования (БСВП), включающий бортовую 2 и наземную 3 части и предназначенный для пространственно-угловой привязки положения БВС;
- подсистема передачи данных (ППД), включающая бортовую 4 и наземную 5 части и предназначенная для высокоскоростной передачи данных с БВС 3. В состав бортовой части ППД входит бортовой компьютер (на Фиг. не указан), на котором установлена специальное программное обеспечение (СПО), обеспечивающее работу автопилота БВС и полезной нагрузки;
- блок геофизических датчиков в составе полезной нагрузки, предназначенный для регистрации физических полей на территории исследования, включающий магнитометр 6, предназначенный для измерения магнитного поля для территории исследования, и регистратор гамма-излучения 7, предназначенный для измерения степени радиоактивности для территории исследования;
- блок оптико-спектральных датчиков зондирования в составе полезной нагрузки, предназначенный для проведения спектрального зондирования поверхности Земли и аэрофотосъемки, включающий лазерный сканер 8, фотокамеру высокого разрешения 9, мультиспектральную камеру с тепловым ИК-каналом 10;
- наземная рабочая станция 11 с прикладным программным обеспечением (ППО), предназначенным для управления комплексом - планирования полетов, управления БВС, приема и хранения данных, а также мониторинга работы всех его систем.
При этом узлы АПКС связаны между собой следующим образом:
Бортовые части БСВП 2 и ППД 4, а также регистратор гамма-излучения 7 блока геофизических датчиков и лазерный сканер 8, фотокамера высокого разрешения 9, мультиспектральная камера с тепловым ИК-каналом 10 блока оптико-спектральных датчиков зондирования подсоединяются к системе крепления БВС 1, например, с помощью болтового прикручивания. Магнитометр 6 блока геофизических датчиков выносится, например, с помощью троса на расстояние, исключающее влияние собственного магнитного поля силовой системы БВС на показания. Трос в свою очередь присоединяется в БВС 1, например, с помощью болтового прикручивания.
При этом бортовая часть БСВП 2, регистратор гамма-излучения 7 блока геофизических датчиков и лазерный сканер 8, фотокамера высокого разрешения 9, мультиспектральная камера с тепловым ИК-каналом 10 блока оптико-спектральных датчиков зондирования, магнитометр 6 присоединены к бортовому компьютеру кабельным соединением.
Наземная часть БСВП 2 соединяется с бортовой частью БСВП 3 посредством радиоканала. Наземная часть ППД 4 соединяется с бортовой частью ППД 5 посредством радиоканала. Наземная рабочая станция 11 присоединяется к наземной части ППД 5, например, с помощью кабельного Ethernet соединения.
При этом заявитель поясняет, что при использовании заявленного АПКС возможно одновременное использование любого набора датчиков полезной нагрузки АПКС (блока геофизических датчиков и блока оптико-спектральных датчиков зондирования), необходимых для решения конкретной задачи, но не менее одного (см. Примеры 1 - 5).
Далее заявителем приведено подробное описание блоков АПКС.
Беспилотное воздушное судно (БВС) 1.
БВС 1 является носителем блока синхронизации и высокоточного позиционирования (БСВП) 2, подсистемы передачи данных (ППД) 3, а также блоков полезной нагрузки - блока геофизических датчиков, включающего магнитометр 4 и регистратор гамма-излучения 5, и блока оптико-спектральных датчиков зондирования, включающего лазерный сканер 6, фотокамеру высокого разрешения 7, мультиспектральную камеру с тепловым ИК-каналом 8.
Для достижения заявленного технического результата БВС должен отвечать требованиям необходимой грузоподъемности и времени полета с полезной нагрузкой.
Из исследованного уровня техники заявителем выявлены БВС подходящего типа, например, беспилотная авиационная система (БАС) коптерного типа с гибридными бензиново-электрическими силовыми установками и универсальной системой крепления для полезной нагрузки [https://ascam.aero/bvs-mk-1600/]. В состав БАС может входить наземная станция управления (НСУ) с программным обеспечением (ПО) для управления полетами и радиоканал связи (РКС).
Блок синхронизации и высокоточного позиционирования (БСВП).
БСВП состоит из бортовой части 2, расположенной в защищенном корпусе на борту БВС 1, и наземной части 3, которая представляет собой приемопередатчики, устанавливающиеся на земной поверхности.
БСВП предназначен для координатно-временного обеспечения полетов БВС, в частности для:
синхронизации наземной станции и оборудования на борту БВС;
хранения и передачи шкалы времени;
обеспечения координатами БВС в локальной системе координат либо в глобальной системе координат в случае наличия сигналов глобальных навигационных спутниковых систем (ГНСС).
БСВП обеспечивает:
выдачу координатно-временной метки;
выработку опорного синхросигнала;
выдачу координатного решения;
начальную синхронизацию и получение координат от станции координатно-временной привязки высокой точности.
Подсистема передачи данных (ППД).
ППД включает бортовую 4 и наземную 5 части.
Основное предназначение ППД - высокоскоростная передача данных с БВС.Дополнительно ППД с помощью специального программного обеспечения (СПО), установленного на бортовой компьютер (на Фиг. не указан), входящий в бортовую часть 4 ППД, используется для передачи команд датчикам полезной нагрузки от рабочей станции.
Бортовая часть ППД 4 устанавливается на БВС в общем защитном корпусе. В состав бортовой части входит носитель памяти, например, SSD-диск.
Наземная часть ППД 5 состоит из модуля радиоканала и антенно-фидерной системы (на Фиг.не указаны). Наземная часть ППД 5 подключается к рабочей станции 11 и к бортовой части ППД 4.
Блок геофизических датчиков, включающий магнитометр 6 и регистратор гамма-излучения 7.
Магнитометр 6 предназначен для регистрации абсолютного вектора (B) магнитного поля и/или трех его составляющих (Hx, Hy, Hz). Тип магнитометра выбирается с учетом поставленных задач. Например, при необходимости регистрации только абсолютного вектора магнитного поля B на АПКС может быть установлен протонный или квантовый магнитометр. При необходимости регистрации в рамках выполнения полетного задания трех составляющих магнитного поля (Hx, Hy, Hz) на АПКС устанавливается 3-компоненетный магнитометр, например феррозондового типа.
Регистратор гамма-излучения 7 предназначен для регистрации радиоактивности на территории исследования и представляет собой гамма-спектрометр. Гамма-спектрометр позволяет определять как интегральное гамма-излучение на территории исследования, так и проводить спектрометрический анализ, который позволяет определять содержание естественных радиоактивных элементов (уран, тори, калий). Тип гамма-спектрометра определяется решаемыми в рамках текущего полетного задания задачами. Например, при наличии на территории исследования высокорадиоактивных отложений может использоваться компактный полупроводниковый гамма-спектрометр, обладающий низкой эффективностью, но высокой скоростью счета гамма-квантов по сравнению с другими типами гамма-спектрометров. При отсутствии высокорадиоактивных объектов или отложений на территории исследования на АПКС может быть установлен гамма-спектрометр сцинтилляционного типа, обладающий более высокой эффективностью по сравнению с компактными полупроводниковыми гамма-спектрометрами, но низкой скоростью счета гамма-квантов.
Блок оптико-спектральных датчиков зондирования, включающий лазерный сканер 8, фотокамеру высокого разрешения 9, мультиспектральную камеру с тепловым ИК-каналом 10.
Лазерный сканер 8 служит для проведения лазерного сканирования. Лазерное сканирование представляет собой измерение расстояния от лазерного сканера до отражающих лазер поверхностей с целью определения абсолютных высот изучаемой местности. Например, из исследуемого уровня техники на момент подачи заявки приоритетным типом лазерных сканеров является импульсный.
Фотокамера высокого разрешения 9 служит для проведения аэрофотосъемки. Каждая фотография благодаря использованию бортовой 2 и наземной 3 части БСВП обладает собственной координатной привязкой. По результатам проведенной аэрофотосъемки проводится фотограмметрическая обработка полученного материала с возможностью последующего построения ортофотоплана территории исследования и извлечения из него ЦММ.
Мультиспектральная камера с тепловым ИК-каналом позволяет проводить аэрофотосъемку с худшим по сравнению с фотокамерой высокого разрешения 9 разрешением, но в отдельных областях электромагнитного спектра. По данным мультиспектральной аэрофотосъемки возможен расчет нормализованных индексов растительности (NDVI-индексов) с целью оценки типа растительности на территории исследования и степени ее вегетации. По тепловому ИК-каналу возможно определять собственное тепловое излучение объектов, расположенных на территории исследования, а также проводить тепловой мониторинг местности.
Допускается установка на БВС 1 отдельной в качестве полезной нагрузки мультиспектральной камеры без теплового ИК-канала, но в таком случае для расчета собственного теплового излучения объектов, расположенных на территории исследования, и теплового мониторинга необходимо использовать отдельную тепловизионную камеру, что приведет к утяжелению полезной нагрузки.
Наземная рабочая станция 11.
Наземная рабочая станция 11 представляет собой специализированный компьютер оператора с подключенной наземной частью ППД 5, обеспечивающей связь с БВС 1 посредством бортовой части ППД 4.
Наземная рабочая станция 11 предназначена для контроля над летными характеристиками в процессе выполнения полетного задания и параметрами физических полей, данные о которых поступают в режиме реального времени, при этом используется прикладное программное обеспечение, установленное на наземную рабочую станцию 11. Наземная рабочая станция 11 позволяет управлять АПКС в части работы с полезной нагрузкой, а также передавать команды на БВС 1.
Дополнительно с помощью наземной рабочей станции 11 может проводиться обработка получаемого с АПКС материала.
Далее заявителем приведено пояснение возможностей заявленного АПКС.
Заявленный АПКС дает возможность оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ вследствие расширенной компоновки блоков полезной нагрузки.
Совместное использование всех датчиков полезной нагрузки из ряда:
- магнитометр 6,
- регистратор гамма-излучения 7,
- лазерный сканер 8,
- фотокамера высокого разрешения 9,
- мультиспектральная камера с тепловым ИК-каналом 10 позволяет получить полную информацию о рельефе и условиях местности территории исследования, а также верхней части разреза (ВЧР).
Эта информация бывает критически важной при обработке и интерпретации данных, полученных при проведении работ.Рыхлая часть ВЧР, наличие больших перепадов по высоте рельефа на территории исследования ухудшают качество получаемых при проведении сейсморазведочных работ данных.
Высокая степень залесенности территории исследования увеличивает время работ по вырубке просек, приводит к удорожанию работ вследствие необходимости финансового возмещения вырубленных деревьев.
Наличие объектов, имеющих антропогенную природу происхождения, на территории исследования, например, трубопроводов, жилых зданий и массивов и т.д., не позволяет проводить сейсморазведочные работы рядом с этими объектами.
Заявленный АПКС подразумевает многофункциональность вследствие модульности полезной нагрузки:
Согласно исследованного заявителем на дату представления заявочных материалов уровня техники заявителем выявлено, что уже существующие на основе беспилотных воздушных судов (БВС) комплексы, как правило, направлены на решение отдельных узкоспециализированных задач, применение же нескольких БВС для решения частных проблем приводит к резкому удорожанию работ.
Заявленный АПКС позволяет устанавливать датчики полезной нагрузки из ряда: магнитометр 6, регистратор гамма-излучения 7, лазерный сканер 8, фотокамера высокого разрешения 9, мультиспектральная камера с тепловым ИК-каналом 10 в любых сочетаниях.
Такой подход позволяет использовать один комплекс для решения разного рода задач при планировании и сопровождении сейсмических работ, таких как: построение ЦММ и ЦМР, оперативное топогеодезическое сопровождение и т.д. (см. Примеры).
Заявленный АПКС дает возможность высокой степени совместной координатной привязки данных, полученных с помощью разных датчиков блоков полезной нагрузки, вследствие введения в состав заявленного устройства блока синхронизации и высокоточного позиционирования (БСВП).
Вследствие модульности полезной нагрузки актуальной проблемой является совместная координатная привязка данных, получаемых с датчиков АПКС. Так, магнитометр 6 находится на подвесе, на расстоянии от БВС 1, фотокамера высокого разрешения 9 и мультиспектральная камера с тепловым ИК-каналом 10 имеют свое разрешение и размер кадра. В связи с вышеуказанным, в состав заявленного комплекса для успешной реализации способа введен блок синхронизации и высокоточного позиционирования (БСВП), который позволяет работать в локальной системе координат, не зависящей от спутниковых систем навигации. Благодаря связи по радиоканалу и определения времени прихода радиосигнала от бортовой 2 до наземной 3 части БСВП определяется точное местоположение БВС 1 на территории исследования. А вследствие известного расстояния от БСВП до каждого датчика обеспечивается высокой степени совместной координатной привязки данных, полученных с разных датчиков блоков полезной нагрузки, что выгодно отличает заявленное техническое решение от выявленных из исследованного уровня техники известных технических решений.
Кроме решения задач планирования и сопровождения сейсморазведочных работ, заявленный АПКС может позволить решать широкий спектр задач в различных областях производства, техники и науки - от экологического мониторинга, контроля за радиационным загрязнением в экологии, контроля за выполнением требований техники безопасности при проведении производственных работ и/или оказания услуг, особенно в областях техники, связанных с измерениями радиоактивных излучений и/или вредных, токсичных веществ, выявление контуров археологических объектов и т.п.
Далее заявителем приведено описание заявленного способа многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ с использованием заявленного АПКС.
Заявленный способ осуществляется на заявленном АПКС следующим образом:
1. Создают полетное задание и выбор точки взлета и приземления БВС 1 известным способом, а именно, путем наложения маршрута полета на подложку, представляющую собой привязанную по координатам карту территории исследования.
2. Исходя из поставленных задач, выбирают состав и компоновку датчиков полезной нагрузки из ряда: магнитометр 6, регистратор гамма-излучения 7, лазерный сканер 8, фотокамера высокого разрешения 9, мультиспектральная камера с тепловым ИК-каналом 10, но не менее одного.
3. На выбранной точке устанавливают: наземную рабочую станцию 11 с прикладным программным обеспечением (ППО), наземную часть подсистемы передачи данных (ППД) 5, наземную часть блока синхронизации и высокоточного позиционирования (БСВП) 3.
4. Далее снаряжают БВС 1, для чего производят установку на БВС 1 полезной нагрузки из ряда: магнитометр 6, регистратор гамма-излучения 7, лазерный сканер 8, фотокамера высокого разрешения 9, мультиспектральная камера с тепловым ИК-каналом 10, но не менее одного, а также бортовых частей БСВП 2 и ППД 4.
5. Далее полезную нагрузку подключают к бортовой сети питания БВС 1 через бортовой компьютер в составе бортовой части ППД 5 путем использования платы с установленной на ней программой для ЭВМ, например, программой заявителя «Модуль управления микро-коммутатора для бортовой последовательности сети беспилотного воздушного судна (БВС)» (Свидетельство о государственной регистрации программы для ЭВМ №2021610951).
6. Далее производят запуск БВС 1 (согласно инструкции на него).
7. При этом запускают ППО, установленное на наземной рабочей станции 11, включающее программы для ЭВМ, например, программы заявителя «Библиотека для организации доставки массивов данных на основе полудуплексного канала связи» (Свидетельство о государственной регистрации программы для ЭВМ №2020665129) и «Библиотека протокола обмена данными геофизических измерений» (Свидетельство о государственной регистрации программы для ЭВМ №2020665130).
При запуске ППО производят следующие рабочие операции:
- проверяют работоспособность бортовой 4 и наземной 5 частей ППД (при этом соответствующая иконка должна подсвечиваться зеленым цветом),
- проверяют работоспособность полезной нагрузки путем подачи команды на запуск и окончание работы всех используемых датчиков с помощью кнопок в ППО,
- проверяют настройки БСВП с помощью программы для ЭВМ, например, программы заявителя «Модуль настройки гетеродина передатчика системы радиопозиционирования беспилотного воздушного судна (БВС)» (Свидетельство о государственной регистрации программы для ЭВМ №2020666185), входящей в состав ППО.
8. После взлета определяют исходные координаты положения БВС 1 и далее с помощью ППО и БСВП осуществляют контроль фактического маршрута БВС 1 и его отклонение от планируемого путем непрерывного определения координат БВС 1.
9. После прилета БВС 1 на первую точку территории исследования подают через бортовой компьютер ППД с помощью ППО команду датчикам полезной нагрузки на начало процесса съемки.
10. При этом:
- в случае наличии в составе полезной нагрузки фотокамеры высокого разрешения 9 и/или мультиспектральной камеры с тепловым ИК-каналом 10, бортовым компьютером генерируется паспорт каждого снимка, который передается через ППД на наземную рабочую станцию 11 в режиме реального времени, параллельно паспорт каждого снимка дублируется в носитель памяти бортовой части ППД 4 с помощью СПО;
- в случае наличии в составе полезной нагрузки магнитометра 6 и/или регистратора гамма-излучения 7, показания указанных датчиков передаются на наземную рабочую станцию 11 через ППД в режиме реального времени, параллельно показания дублируются в носитель памяти бортовой части ППД 4 с помощью СПО.
11. После окончания полетного задания датчикам полезной нагрузки подают команду на остановку записи.
12. БВС 1 осуществляет посадку в точке посадки, после чего отключают бортовое питание.
13. Далее передают на наземную рабочую станцию 11 носитель памяти бортовой части ППД 4 с показаниями датчиков и снимками с камер полезной нагрузки.
14. Полученные с носителя памяти бортовой части ППД 4 данные обрабатывают с помощью ППО, в состав которого входят программы для ЭВМ, например, программы заявителя «Модуль динамического подключения и исполнения инструментов в среде приложений на языке Python» (Свидетельство о государственной регистрации программы для ЭВМ №2021668139); «Модуль обработки данных магнитометрии в среде приложений на языке Python» (Свидетельство о государственной регистрации программы для ЭВМ №2021667977). При этом получают информацию о территории исследования для планирования и сопровождения сейсморазведочных работ, например, в виде: карты наблюденного магнитного поля, карты естественной радиоактивности, ЦММ, ортофотоплана, карты распределения нормализованного вегетационного индекса (NDVI-индекса), карты распределения значений собственного теплового излучения объектов в дальнем инфракрасном свете.
Далее заявителем приведены примеры осуществления заявленного технического решения.
Заявитель поясняет, что в зависимости от решаемых задач в качестве полезной нагрузки может использоваться различный набор датчиков блоков геофизических и оптико-спектральных датчиков, например, приведенный далее в Примерах 1 - 6, но не менее одного в каждом блоке. При этом Примеры 1 - 6 не исчерпывают варианты набора датчиков.
Пример 1. Проведение многофункциональной аэросъемки для комплексной оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ по заявленному способу с использованием заявленной АПКС с набором датчиков: магнитометр 6, регистратор гамма-излучения 7, лазерный сканер 8, фотокамера высокого разрешения 9 и мультиспектральная камера с тепловым ИК-каналом 10.
Для комплексной оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ провели многофункциональную аэросъемку по заявленному способу, для чего:
1. Создали полетное задание и выбор точки взлета и приземления БВС 1, путем наложения маршрута полета на подложку, представляющую собой привязанную по координатам карту территории исследования.
2. Исходя из комплексной оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ, выбрали компоновку датчиков полезной нагрузки в составе: магнитометр 6, регистратор гамма-излучения 7, лазерный сканер 8, фотокамера высокого разрешения 9, мультиспектральная камера с тепловым ИК-каналом 10.
3. На выбранной точке установили наземную рабочую станцию 11 с прикладным программным обеспечением (ППО), наземную часть подсистемы передачи данных (ППД) 5, наземную часть блока синхронизации и высокоточного позиционирования (БСВП) 3.
4. Далее снарядили БВС 1, при этом произвели установку на БВС 1 полезной нагрузки в составе: магнитометр 6, регистратор гамма-излучения 7, лазерный сканер 8, фотокамера высокого разрешения 9, мультиспектральная камера с тепловым ИК-каналом 10, а также бортовых частей БСВП 2 и ППД 4.
5. Далее полезную нагрузку подключили к бортовой сети питания БВС 1 через бортовой компьютер в составе бортовой части ППД 5 путем использования платы с установленной на ней программой для ЭВМ «Модуль управления микро-коммутатора для бортовой последовательности сети беспилотного воздушного судна (БВС)» (Свидетельство о государственной регистрации программы для ЭВМ №2021610951).
6. Далее произвели запуск БВС 1 (согласно инструкции на него).
7. При этом запустили ППО, установленное на наземной рабочей станции 11, включающее программы для ЭВМ «Библиотека для организации доставки массивов данных на основе полудуплексного канала связи» (Свидетельство о государственной регистрации программы для ЭВМ №2020665129) и «Библиотека протокола обмена данными геофизических измерений» (Свидетельство о государственной регистрации программы для ЭВМ №2020665130)
При запуске ППО произвели следующие рабочие операции:
- проверили работоспособность бортовой 4 и наземной 5 частей ППД (при этом соответствующая иконка подсветилась зеленым цветом),
- проверили работоспособность полезной нагрузки путем подачи команды на запуск и окончание работы всех используемых датчиков с помощью кнопок в ППО,
- проверили настройки БСВП с помощью программы для ЭВМ «Модуль настройки гетеродина передатчика системы радиопозиционирования беспилотного воздушного судна (БВС)» (Свидетельство о государственной регистрации программы для ЭВМ №2020666185), входящей в состав ППО.
8. После взлета определили исходные координаты положения БВС 1 и далее с помощью ППО и БСВП осуществляли контроль фактического маршрута БВС 1 и его отклонение от планируемого путем непрерывного определения координат БВС 1.
9. После прилета БВС 1 на первую точку территории исследования подали через бортовой компьютер ППД с помощью ППО команду датчикам полезной нагрузки на начало процесса съемки.
10. При этом:
- бортовым компьютером генерировался паспорт каждого снимка, полученного с помощью фотокамеры высокого разрешения 9 и мультиспектральной камеры с тепловым ИК-каналом 10, паспорт каждого снимка передавался через ППД на наземную рабочую станцию 11 в режиме реального времени, параллельно паспорт каждого снимка дублировался в носитель памяти бортовой части ППД 4,
- показания магнитометра 6 и регистратора гамма-излучения 7 передавались на наземную рабочую станцию 11 через ППД в режиме реального времени, параллельно показания дублировались в носитель памяти бортовой части ППД 4.
11. После окончания полетного задания датчикам полезной нагрузки подали команду на остановку записи.
12. БВС 1 осуществил посадку в точке посадки, отключили бортовое питание.
13. Далее передали на наземную рабочую станцию 11 носитель памяти бортовой части ППД 4 с показаниями датчиков и снимками с камер полезной нагрузки.
14. Полученные с полезной нагрузки данные обработали с помощью ППО, в состав которого входили программы для ЭВМ «Модуль динамического подключения и исполнения инструментов в среде приложений на языке Python» (Свидетельство о государственной регистрации программы для ЭВМ №2021668139) и «Модуль обработки данных магнитометрии в среде приложений на языке Python» (Свидетельство о государственной регистрации программы для ЭВМ №2021667977).
По данным, извлеченным из носителя памяти бортовой части ППД 4 получили информацию о территории исследования:
- по данным магнитометра 6 была построена карта наблюденного магнитного поля (Фиг. 2);
- по данным регистратора гамма-излучения 7 была построена карта естественной радиоактивности для территории исследования (Фиг.3);
- по данным лазерного сканера 8 была построена ЦММ для территории исследования (Фиг. 4);
- по данным фотокамеры высокого разрешения 9 был построен ортофотоплан для территории исследования (Фиг. 5);
- по данным мультиспектральной камеры с тепловым ИК-каналом 10 были построены карта распределения нормализованного вегетационного индекса (NDVI-индекса) для территории исследования (фиг. 6) и карта распределения значений собственного теплового излучения объектов в дальнем инфракрасном свете для территории исследования (Фиг. 7)
При этом все полученные карты были рассчитаны в единой системе координат.
В результате совместной обработки полученных карт была рассчитана ЦМР, оценена вегетационная активность и степень залесенности территории исследования, выявлены помехи, имеющие антропогенную природу происхождения, оценено строение ВЧР.
Так, например, путем наложения ЦММ и ортофотоплата на ЦМР выявлена скрытая овражная сеть.
Исходя из Примера 1, можно сделать вывод, что заявителем достигнут заявленный технический результат:
- произведена комплексная оценка влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ вследствие расширенной компоновки блоков полезной нагрузки;
- показана высокая степень совместной координатной привязки данных, полученных с помощью разных датчиков блоков полезной нагрузки, вследствие введения в состав заявленного устройства блока синхронизации и высокоточного позиционирования (БСВП).
Пример 2 . Проведение многофункциональной аэросъемки для получения информации о рельефе местности по заявленному способу с использованием заявленной АПКС с набором датчиков лазерного сканера 8 и фотокамеры высокого разрешения 9.
Рельеф оказывает существенное влияние на качество получаемых с помощью сейсморазведочных работ данных. При сильном изменении рельефа на территории исследования может наблюдаться падение отношения сигнал/шум. Чтобы свести влияние рельефа к минимум необходимо иметь актуальную подробную модель. Актуальную цифровую модель рельефа можно рассчитать с использованием заявленного АПКС.
Для этого провели последовательность действий по Примеру 1, отличающийся тем, что в качестве полезной нагрузки использовали лазерный сканер 8 и фотокамеру высокого разрешения 9.
По результатам работы лазерного сканера 8 рассчитана цифровая модель местности ЦММ (Фиг. 4), а по результатам работы фотокамеры высокого разрешения 9 построен ортофотоплан местности (Фиг. 5).
Комплексная интерпретация ортофотоплана и ЦММ позволила получит цифровую модель рельефа (ЦМР). При этом и ортофотоплан, и ЦММ находились в единой системе координат.
Полученный рельеф использован при планировании сейсморазведочных работ при построении сейсмической системы наблюдения.
Исходя из Примера 2, можно сделать вывод, что заявителем достигнут заявленный технический результат:
- произведена оценка влияния условий местности на результаты проведения сейсмических работ вследствие определенной компоновки блоков полезной нагрузки;
- показана высокая степень совместной координатной привязки данных, полученных с помощью разных датчиков блоков полезной нагрузки, вследствие введения в состав заявленного устройства блока синхронизации и высокоточного позиционирования (БСВП).
Пример 3. Проведение многофункциональной аэросъемки для получения актуальной информации об объеме леса, необходимого к вырубке, и реальных границах сельскохозяйственных угодий по заявленному способу с использованием заявленной АПКС с набором датчиков: лазерный сканер 8 и мультиспектральная камеры с тепловым ИК-каналом 10.
Во время проведения сейсмических работ лесорубы сейсмической партии прокладывают просеки в лесных массивах и потравы на сельскохозяйственных угодиях. При этом все вырубленные деревья и передавленные культуры подлежат финансовому возмещению за счет средств организации, производящей сейсмические работы. Однако объем вырубленного леса и передавленных сельскохозяйственных культур рассчитывается согласно планам, зачастую устаревшим. Для получения актуальной информации об объеме леса, необходимого к вырубке, и реальных границах сельскохозяйственных угодий, по которым будет проезжать техника, возможно использовать заявленный способ с использованием заявленной АПКС.
Для этого провели последовательность действий по Примеру 1, отличающийся тем, что на АПКС в качестве полезной нагрузки установили блок оптико-спектральных датчиков зондирования в составе лазерного сканера 8 и мультиспектральной камеры с тепловым ИК-каналом 10.
Объем вырубки рассчитывали с помощью ЦММ (Фиг. 4), тип насаждений определили с помощью нормализованного вегетационного индекса (NDVI-индекса) (Фиг. 6). ЦММ и карта распределения NDVI-индекса получили в единой системе координат.
Исходя из Примера 3, можно сделать вывод, что заявителем достигнут заявленный технический результат:
- произведена оценка влияния условий местности на результаты проведения сейсмических работ вследствие определенной компоновки блоков полезной нагрузки;
- показана высокая степень совместной координатной привязки данных, полученных с помощью разных датчиков блоков полезной нагрузки, вследствие введения в состав заявленного устройства блока синхронизации и высокоточного позиционирования (БСВП).
Пример 4. Проведение многофункциональной аэросъемки для получения информации о содержании естественных радиоактивных элементов на территории исследования по заявленному способу с использованием заявленной АПКС с набором датчиков в составе регистратора гамма-излучения 7 и фотокамеры высокого разрешения 9.
Источником повышенного радиоактивного фона на территории исследования могут являться особые горные породы и минералы, содержащие в себе повышенную концентрацию естественных радиоактивных элементов (ЕРЭ): уран-238, уран-235, торий-232, калий-40). Для выявления повышенного радиоактивного фона, а также определения концентрации ЕРЭ возможно использовать заявленный способ с использованием заявленной АПКС. Информация о повышенном содержании ЕРЭ может позволить определить преобладающие типы глинистых минералов в ВЧР, определить места выхода на поверхность коренных пород. Фотокамера высокого разрешения 9 с данном примере использовалась для выявления источников повышенной радиоактивности, расположенных на поверхности земли и имеющих антропогенную природу происхождения.
Для этого провели последовательность действий по Примеру 1, отличающийся тем, что предпочтительной полезной нагрузкой является регистратор гамма-излучения 7 и фотокамера высокого разрешения 9.
По результатам съемки построили карту естественной радиоактивности для территории исследования (Фиг. 3) и ортофотоплан для территории исследования (Фиг. 5).
При совместной интерпретации карты естественной радиоактивности и ортофотоплан были выявлены зоны повышенной радиоактивности, а также определена природа их происхождения.
Исходя из Примера 4, можно сделать вывод, что заявителем достигнут заявленный технический результат:
- возможность комплексной оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ вследствие расширенной компоновки блоков полезной нагрузки.
Пример 5. Проведение многофункциональной аэросъемки для выявления магнитных аномалий по заявленному способу с использованием заявленной АПКС с набором датчиков в составе магнитометра 6 и фотокамеры высокого разрешения 9.
Магнитные аномалии зачастую имеют антропогенную природу происхождения, например, любые железные конструкции (подземные трубопроводы) создают магнитные аномалии, ярко выделяющиеся на фоне карте наблюденного магнитного поля по амплитуде. Проведение сейсморазведочных работ не допускается в зонах расположения объектов, имеющих антропогенную природу происхождения. Для оценки и выявления таких объектов возможно использовать заявленный способ с использованием заявленной АПКС.
Для этого провели последовательность действий по Примеру 1, отличающийся тем, что полезной нагрузкой является магнитометр 6 и фотокамера высокого разрешения 9. Фотокамера высокого разрешения 9 в данном примере использовалась для выявления видимых источников магнитных аномалий, расположенных на поверхности земли и имеющих антропогенную природу происхождения.
По результатам съемки построили карту наблюденного магнитного поля (Фиг. 2) и ортофотоплан (Фиг. 5) для территории исследования.
При совместной интерпретации карты наблюденного магнитного поля и ортофотоплана были выявлены объекты, расположенные в ВЧР, но имеющие антропогенную природу происхождения.
Исходя из Примера 5, можно сделать вывод, что заявителем достигнут заявленный технический результат:
- возможность комплексной оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ вследствие расширенной компоновки блоков полезной нагрузки.
Пример 6. Проведение многофункциональной аэросъемки для поиска теплоносителей скрытых в верхней части разреза по заявленному способу с использованием заявленной АПКС с набором датчиков в составе мультиспектральной камеры с тепловым ИК-каналом 10.
Наличие теплоносителей, таких как теплотрассы из немагнитных материалов, могут оказать существенное влияние на качество получаемых при проведении сейсморазведочных работ данных. Однако, теплотрассы нагревают окружающие их горные породы и, тем самым, на поверхности фиксируется повышение теплового излучения в дальнем инфракрасном свете. Для поиска теплоносителей скрытых в верхней части разреза возможно использовать заявленный способ с использованием заявленной АПКС.
Для этого провели последовательность действий по Примеру 1, отличающийся тем, что в качестве полезной нагрузки установили мультиспектральную камеру с тепловым ИК-каналом 11.
По результатам работы ИК-канала построили карту распределения значений собственного теплового излучения объектов в дальнем инфракрасном свете (Фиг. 7), что позволило выявить объекты с повышенной собственной температурой относительно окружающей среды.
Исходя из Примера 6, можно сделать вывод, что заявителем достигнут заявленный технический результат: показана возможность оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ вследствие определенной компоновки блоков полезной нагрузки.
Исходя из изложенного выше, можно сделать вывод, что заявителем достигнуты заявленные технические результаты, а именно:
- показана возможность комплексной оценки влияния состава верхней части разреза и условий местности на результаты проведения сейсмических работ вследствие расширенной компоновки блоков полезной нагрузки - Примеры 1 - 6, Фиг.2 - 7;
- показана многофункциональность заявленного комплекса вследствие модульности полезной нагрузки - Примеры 1 - 6;
- показана высокая степень совместной координатной привязки данных, полученных с помощью разных датчиков блоков полезной нагрузки, вследствие введения в состав заявленного устройства блока синхронизации и высокоточного позиционирования (БСВП) - Примеры 1 - 3.
Заявленное техническое решение соответствует условию патентоспособности «новизна», предъявляемому к изобретениям, так как при определении уровня техники не выявлены технические решения, которым присущи признаки, идентичные (то есть совпадающие по исполняемой ими функции и форме выполнения этих признаков) совокупности признаков, перечисленных в формуле изобретения.
Заявленное техническое решение соответствует условию патентоспособности «изобретательский уровень», предъявляемому к изобретениям, поскольку не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками заявленного изобретения, и не установлена известность влияния отличительных признаков на указанный технический результат.
Заявленное техническое решение соответствует условию патентоспособности «промышленная применимость», предъявляемому к изобретениям, так как может быть изготовлено с использованием известных материалов, комплектующих изделий, стандартных технических устройств и оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
| Универсальное мобильное устройство для выполнения аэрофотосъемки с применением различных пилотируемых воздушных средств | 2021 |
|
RU2795778C1 |
| КОМПЛЕКС ОХРАНЫ МЕСТНОСТИ С ПРИМЕНЕНИЕМ БЕСПИЛОТНОГО ВОЗДУШНОГО СРЕДСТВА | 2024 |
|
RU2834502C1 |
| СПОСОБ АЭРОГАММАСПЕКТРОМЕТРИЧЕСКОЙ СЪЕМКИ ГЕОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2673505C1 |
| МУЛЬТИСПЕКТРАЛЬНЫЙ КОМПЛЕКС ДЛЯ АВИАСЪЕМКИ НАЗЕМНЫХ ОБЪЕКТОВ И СПОСОБ СЪЕМКИ | 2005 |
|
RU2298150C2 |
| Способ аэрофотосъемки наземных объектов в условиях недостаточной освещенности с помощью беспилотных воздушных судов | 2016 |
|
RU2644630C1 |
| Устройство видеонаблюдения беспилотного воздушного судна, узел видеокамеры для такого устройства видеонаблюдения | 2023 |
|
RU2802978C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТАМИ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2018 |
|
RU2699613C1 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Беспилотное воздушное судно-перехватчик | 2024 |
|
RU2840166C1 |



Группа изобретений относится к области геофизики и может быть использована для оказания сервисных геофизических услуг в области недропользования - поиска, разведки и добычи углеводородного сырья, других полезных ископаемых, а также при проведении инженерно-геологических и гидрогеологических исследованиях. Сущностью заявленного технического решения является способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ, заключающийся в том, что создают полетное задание и выбор точки взлета и приземления беспилотного воздушного судна. Выбирают состав и компоновку датчиков полезной нагрузки, на выбранной точке устанавливают: наземную рабочую станцию, наземную часть подсистемы передачи данных, наземную часть блока синхронизации и высокоточного позиционирования. Снаряжают беспилотное воздушное судно и производят запуск беспилотного воздушного судна. После прилета беспилотного воздушного судна на первую точку территории исследования подают через бортовой компьютер подсистемы передачи данных с помощью прикладного программного обеспечения команду датчикам полезной нагрузки на начало процесса съемки. После окончания полетного задания датчикам полезной нагрузки подают команду на остановку записи, беспилотное воздушное судно осуществляет посадку в точке посадки. Далее передают на наземную рабочую станцию носитель памяти бортовой части подсистемы передачи данных, данные с которого обрабатывают с помощью прикладного программного обеспечения. Также предложен многофункциональный аппаратно-программный комплекс для реализации указанного выше способа, содержащий беспилотное воздушное судно, блок синхронизации и высокоточного позиционирования, включающий бортовую и наземную части, подсистему передачи данных, включающую бортовую и наземную части, блок геофизических датчиков в составе полезной нагрузки с возможностью регистрации физических полей на территории исследования, наземную рабочую станцию с прикладным программным обеспечением с возможностью управления многофункциональным аппаратно-программным комплексом. Технический результат - возможность комплексной оценки влияния состава верхней части разреза (ВЧР) и условий местности на результаты проведения сейсмических работ вследствие расширенной компоновки блоков полезной нагрузки; многофункциональность заявленного комплекса, высокая степень совместной координатной привязки данных, полученных с помощью разных датчиков блоков полезной нагрузки . 2 н.п. ф-лы, 7 ил.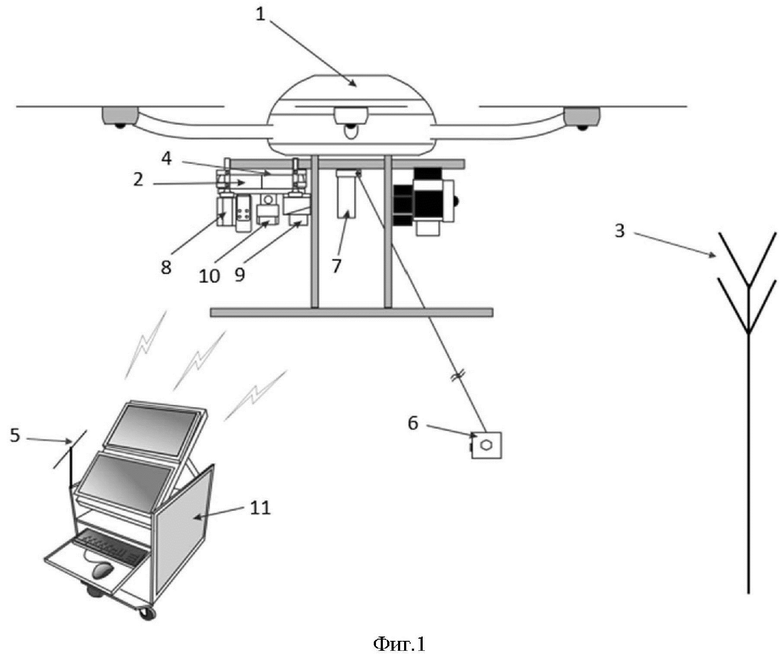
1. Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ, заключающийся в том, что
создают полетное задание и выбор точки взлета и приземления беспилотного воздушного судна;
далее исходя из поставленных задач, выбирают состав и компоновку датчиков полезной нагрузки из ряда: магнитометр, регистратор гамма-излучения, лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом, но не менее одного;
на выбранной точке устанавливают: наземную рабочую станцию с прикладным программным обеспечением, наземную часть подсистемы передачи данных, наземную часть блока синхронизации и высокоточного позиционирования;
далее снаряжают беспилотное воздушное судно, для чего производят установку на него полезной нагрузки из ряда: магнитометр, регистратор гамма-излучения, лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом, но не менее одного, а также бортовых частей блока синхронизации и высокоточного позиционирования и подсистемы передачи данных;
далее полезную нагрузку подключают к бортовой сети питания беспилотного воздушного судна через бортовой компьютер в составе бортовой части подсистемы передачи данных путем использования платы с установленной на ней программой для ЭВМ;
далее производят запуск беспилотного воздушного судна, при этом запускают прикладное программное обеспечение, установленное на наземной рабочей станции;
после взлета беспилотного воздушного судна определяют исходные координаты его положения и далее с помощью прикладного программного обеспечения и блока синхронизации и высокоточного позиционирования осуществляют контроль фактического маршрута беспилотного воздушного судна и его отклонение от планируемого путем непрерывного определения координат беспилотного воздушного судна;
после прилета беспилотного воздушного судна на первую точку территории исследования подают через бортовой компьютер подсистемы передачи данных с помощью прикладного программного обеспечения команду датчикам полезной нагрузки на начало процесса съемки, при этом:
- в случае наличия в составе полезной нагрузки фотокамеры высокого разрешения и/или мультиспектральной камеры с тепловым ИК-каналом, бортовым компьютером генерируется паспорт каждого снимка, который передается через подсистему передачи данных на наземную рабочую станцию в режиме реального времени, параллельно паспорт каждого снимка дублируется в носитель памяти бортовой части подсистемы передачи данных с помощью программного обеспечения для дублирования паспорта каждого снимка и показаний датчиков в носитель памяти бортовой части подсистемы передачи данных;
- в случае наличия в составе полезной нагрузки магнитометра и/или регистратора гамма-излучения, показания указанных датчиков передаются на наземную рабочую станцию через подсистему передачи данных в режиме реального времени, параллельно показания дублируются в носитель памяти бортовой части подсистемы передачи данных с помощью программного обеспечения для дублирования паспорта каждого снимка и показаний датчиков в носитель памяти бортовой части подсистемы передачи данных;
после окончания полетного задания датчикам полезной нагрузки подают команду на остановку записи, беспилотное воздушное судно осуществляет посадку в точке посадки, после чего отключают бортовое питание;
далее передают на наземную рабочую станцию носитель памяти бортовой части подсистемы передачи данных с показаниями датчиков и снимками с камер полезной нагрузки;
полученные с носителя памяти бортовой части подсистемы передачи данных данные обрабатывают с помощью прикладного программного обеспечения, при этом получают информацию о территории исследования для планирования и сопровождения сейсморазведочных работ.
2. Многофункциональный аппаратно-программный комплекс для реализации способа по п.1, содержащий:
беспилотное воздушное судно;
блок синхронизации и высокоточного позиционирования, включающий бортовую и наземную части, с возможностью пространственно-угловой привязки положения беспилотного воздушного судна;
подсистему передачи данных, включающую бортовую и наземную части, с возможностью высокоскоростной передачи данных с беспилотного воздушного судна, при этом в состав бортовой части подсистемы передачи данных входит бортовой компьютер с возможностью обеспечения работы автопилота беспилотного воздушного судна и полезной нагрузки;
блок геофизических датчиков в составе полезной нагрузки с возможностью регистрации физических полей на территории исследования, включающий магнитометр и регистратор гамма-излучения;
блок оптико-спектральных датчиков зондирования в составе полезной нагрузки, с возможностью проведения спектрального зондирования поверхности Земли и аэрофотосъемки, включающий лазерный сканер, фотокамеру высокого разрешения, мультиспектральную камеру с тепловым ИК-каналом;
наземная рабочая станция с прикладным программным обеспечением, с возможностью управления многофункциональным аппаратно-программным комплексом;
при этом узлы многофункционального аппаратно-программного комплекса связаны между собой следующим образом: бортовые части блока синхронизации и высокоточного позиционирования и подсистемы передачи данных, а также регистратор гамма-излучения блока геофизических датчиков и лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом блока оптико-спектральных датчиков зондирования подсоединены к системе крепления беспилотного воздушного судна, магнитометр блока геофизических датчиков закреплен механически на расстоянии от беспилотного воздушного судна, исключающем влияние собственного магнитного поля силовой системы беспилотного воздушного судна на показания; при этом бортовая часть блока синхронизации и высокоточного позиционирования, регистратор гамма-излучения, лазерный сканер, фотокамера высокого разрешения, мультиспектральная камера с тепловым ИК-каналом и магнитометр присоединены к бортовому компьютеру кабельным соединением; наземная часть блока синхронизации и высокоточного позиционирования соединена с бортовой частью блока синхронизации и высокоточного позиционирования посредством радиоканала; наземная часть подсистемы передачи данных соединена с бортовой частью подсистемы передачи данных посредством радиоканала, наземная рабочая станция присоединена к наземной части подсистемы передачи данных посредством кабельного соединения.
| 0 |
|
SU173640A1 | |
| US 20200164971 A1, 28.05.2020 | |||
| 0 |
|
SU162771A1 | |
| CN 110244381 A, 17.09.2019 | |||
| CN 207502748 U, 15.06.2018 | |||
| EP 3413092 A1, 12.12.2018. | |||

