Изобретение относится к транспортному машиностроению, в частности, к двухзвенным гусеничным машинам (ДГМ) с гидравлической системой управления поворотно-сцепным устройством (ПСУ).
Известна гидравлическая система управления ПСУ ДГМ, содержащая шестеренный насос с редуктором привода, карданный вал, гидроциклон, два демпфера, четыре силовых гидроцилиндра, бак, предохранительный клапан, два золотника, соединительные трубопроводы [Осколков, К.В. Первые отечественные сочлененные гусеничные машины - двухзвенные транспортеры «Витязь». [Текст] / К.В. Осколков - Уфа: Слово, 2005 - 280 с.].
Указанное техническое решение является наиболее близким к заявленному по технической сущности и достигаемому результату и принято за прототип.
Известная гидравлическая система служит для управления поворотом ДГМ, а также принудительного складывания звеньев в вертикальной плоскости. Принудительное складывания звеньев осуществляется гидроцилиндрами вертикального складывания от золотника управления. Поршни гидроцилиндров можно зафиксировать (блокировать) в любом положении путем запирания рабочей жидкости в полостях цилиндров. Управление принудительным складыванием звеньев в вертикальной плоскости и блокирование их положения осуществляется водителем в ручном режиме.
Недостатком данной системы является отсутствие возможности принудительного складывания звеньев в вертикальной плоскости с последующим блокированием их положения в автоматическом режиме, так как при стрельбе из смонтированного на втором звене вооружения необходимо образовать единую горизонтальную платформу ДГМ и, тем самым, уменьшить продольно-угловые колебания второго звена в процессе стрельбы с целью повышения ее точности.
Анализ известных технических решений показал, что технической проблемой в данной области является необходимость расширения арсенала средств, используемых для образования единой горизонтальной платформы ДГМ.
Технический результат изобретения - повышение точности стрельбы из установленного на втором звене вооружения как с места, так и в движении за счет уменьшения продольно-угловых колебаний второго звена.
Технический результат направлен на образование единой горизонтальной платформы ДГМ за счет принудительного складывания звеньев в вертикальной плоскости в автоматическом режиме с последующим блокированием их горизонтального положения по сигналу от центральной вычислительной станции (ЦВС) боевого модуля при стрельбе из установленного на втором звене вооружения как с места, так и в движении.
Для решения технической проблемы и достижения указанного технического результата система управления поворотно-сцепным устройством двухзвенной гусеничной машины с боевым модулем на втором звене, содержащая масляный насос, два демпфера, четыре силовых гидроцилиндра, бак, два золотника управления и соединительные трубопроводы дополнительно оснащена блоком управления вертикальным складыванием звеньев, установленным между золотниками управления, при этом блок управления вертикальным складыванием гидравлически связан через демпферы с полостями силовых гидроцилиндров и посредством электрической связи с датчиком горизонтального положения второго звена, электромагнитным пневмоклапаном и центральной вычислительной станцией боевого модуля.
Отличительными признаками от прототипа является то, что система управления поворотно-сцепным устройством двухзвенной гусеничной машины с боевым модулем на втором звене дополнительно оснащена блоком управления вертикальным складыванием звеньев, датчиком горизонтального положения второго звена и электромагнитным пневмоклапаном.
Изобретение поясняется чертежами:
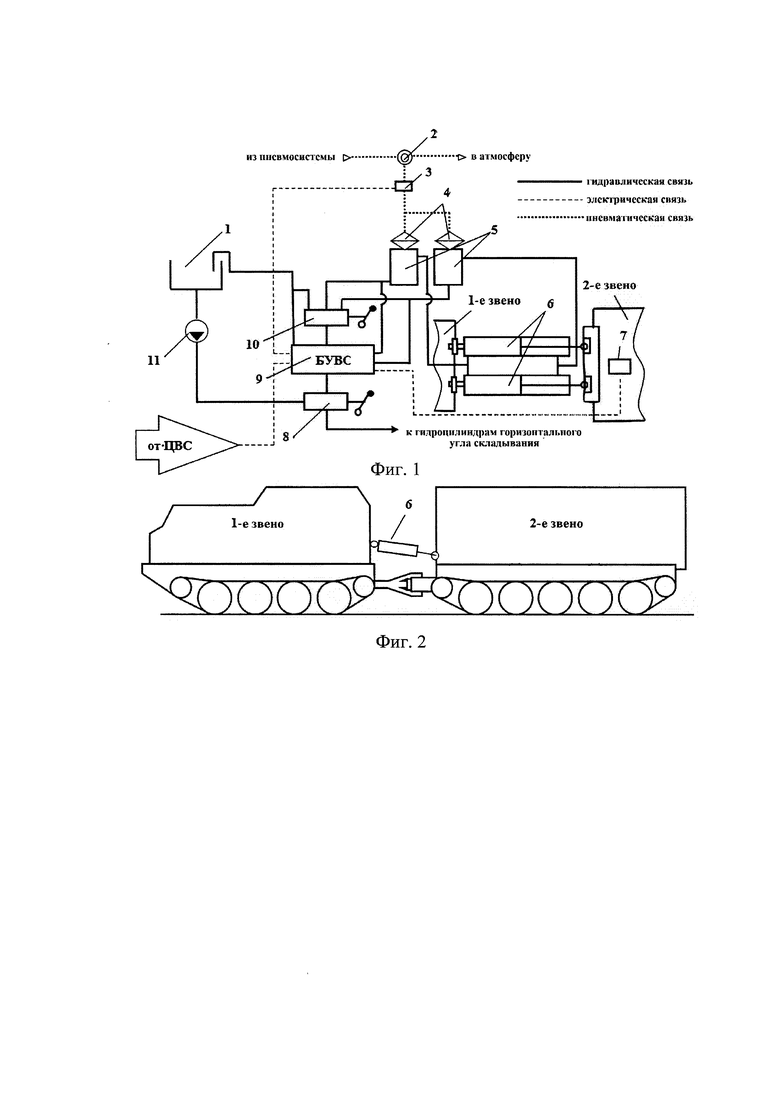
на фиг. 1 представлена принципиальная схема системы управления поворотно-сцепным устройством ДГМ;
на фиг. 2 представлена схема двухзвенной гусеничной машины.
Система содержит масляный бак 1, воздушный кран 2, соединенный трубопроводом через электромагнитный пневмоклапан 3 с полостями пневмокамер 4 демпферов 5, гидроцилиндры вертикального угла складывания 6, датчик горизонтального положения второго звена 7, золотник управления горизонтальным углом складывания 8, имеющий гидравлическую связь через блок управления углом вертикального складывания (БУВС) 9 с золотником управления вертикальным углом складывания 10 и гидравлический насос 11.
Для достижения технического результата в напорную магистраль системы управления ПСУ между золотниками управления 8 и 10 установлен БУВС 9, гидравлически связанный через демпферы 4 с полостями силовых гидроцилиндров 6 и имеющий электрическую связь с датчиком горизонтального положения второго звена 7, электромагнитным пневмоклапаном 3 и ЦВС боевого модуля.
Блок управления вертикальным складыванием 9 звеньев имеет два режима работы: 1 режим - «Ручной» (складывание звеньев в вертикальной плоскости обеспечивается за счет управления водителем золотником 10); 2 режим -«Автоматический» (автоматическое складывание и блокирование звеньев в вертикальной плоскости осуществляется по сигналу ЦВС).
Система управления ПСУ работает следующим образом. В условиях, не требующих принудительного складывания звеньев в вертикальной плоскости и блокирования их горизонтального положения в автоматическом режиме, БУВС 9 обеспечивает гидравлическую связь между золотниками 8 и 10. При этом система обеспечивает управление поворотом машины при движении и, при необходимости, принудительное складывание звеньев в вертикальной плоскости (1 режим - «Ручной»). Блокирование звеньев в вертикальной плоскости осуществляется запиранием выхода масла из гидроцилиндров 6 путем подачи сжатого воздуха из пневмосистемы в полости пневмокамер 4 демпферов 5.
При стрельбе с места или во время движения, в том числе, по неровной опорной поверхности, с ЦВС боевого модуля на БУВС 9 поступает сигнал на выравнивание звеньев относительно друг друга в горизонтальной плоскости с последующим их блокированием (2 режим - «Автоматический»), при этом информация о текущем положении второго звена поступает на БУВС 9 от датчика 7. В результате этого БУВС 9 осуществляет складывание звеньев в вертикальной плоскости до образования горизонтального положения второго звена. При этом, рабочая жидкость из масляного бака 1 под давлением от гидравлического насоса 11 поступает через открытый канал золотника 8 по напорной магистрали в БУВС 9 и далее через демпферы 5 (исключая золотник управления вертикальным углом складывания 10) в соответствующие полости гидроцилиндров 6. После выравнивания второго звена до горизонтального положения, через электромагнитный пневмоклапан 3 (по сигналу от БУВС 9) подается сжатый воздух из пневмосистемы в полости пневмокамер 4 демпферов 5 для запирания выхода рабочей жидкости из гидроцилиндров 6, что обеспечивает блокирование звеньев относительно друг друга в вертикальной плоскости и создание единой горизонтальной платформы.
При завершении стрельбы, по сигналу ЦВС боевого модуля, система управления переходит на 1 режим работы «Ручной», в результате чего БУВС 9 закрывает пневмоклапан 3 и прекращает подачу сжатого воздуха в полости пневмокамер 4 демпферов 5, обеспечивая разблокирование звеньев машины в вертикальной плоскости, а рабочая жидкость поступает от золотника 8 по напорной магистрали через БУВС 9 к золотнику 10, обеспечивая работу ПСУ в штатном режиме.
Таким образом, применение предлагаемой системы управления поворотно-сцепным устройством двухзвенной гусеничной машины, используемой в качестве платформы под вооружение, позволяет по сигналу ЦВС в автоматическом режиме создавать единую горизонтальную платформу ДГМ для повышения точности стрельбы из установленного на втором звене вооружения как с места, так и в движении за счет уменьшения продольно-угловых колебаний второго звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНО-СЦЕПНЫМ УСТРОЙСТВОМ ДВУХЗВЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2016 |
|
RU2644208C2 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
| Поворотно-сцепное устройство двухзвенного гусеничного транспортного средства | 2021 |
|
RU2769228C1 |
| СПОСОБ СКОРОСТНОЙ ФЛАНГОВОЙ СТРЕЛЬБЫ ОРУДИЙНОГО ЗВЕНА ДВУХЗВЕННОЙ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2701627C1 |
| БОЕВАЯ СОЧЛЕНЕННАЯ МАШИНА И ОПОРНО-СЦЕПНОЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СОЧЛЕНЕНИЯ | 2007 |
|
RU2355993C2 |
| СЦЕПНОЕ УСТРОЙСТВО ДЛЯ МНОГОЗВЕННОГО ТРАНСПОРТЁРА | 2017 |
|
RU2674217C1 |
| Способ определения кинематического рассогласования в трансмиссиях многоосных полноприводных колесных машин | 2017 |
|
RU2657136C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДВУХЗВЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2615804C1 |
| Двухзвенное гусеничное транспортное средство для перевозки длинномерных грузов | 2021 |
|
RU2765311C1 |
| ПЛАВАЮЩАЯ ДВУХЗВЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2021 |
|
RU2753734C1 |
Изобретение относится к двухзвенным гусеничным машинам с гидравлической системой управления поворотно-сцепным устройством. Система управления содержит масляный насос, два демпфера, четыре силовых гидроцилиндра, бак, два золотника управления, соединительные трубопроводы и блок управления вертикальным складыванием звеньев, установленный между золотниками управления. Блок управления вертикальным складыванием гидравлически связан через демпферы с полостями силовых гидроцилиндров и посредством электрической связи - с датчиком горизонтального положения второго звена, электромагнитным пневмоклапаном и центральной вычислительной станцией боевого модуля. Достигается повышение точности стрельбы из установленного на втором звене вооружения как с места, так и в движении за счет уменьшения продольно-угловых колебаний второго звена. 2 ил.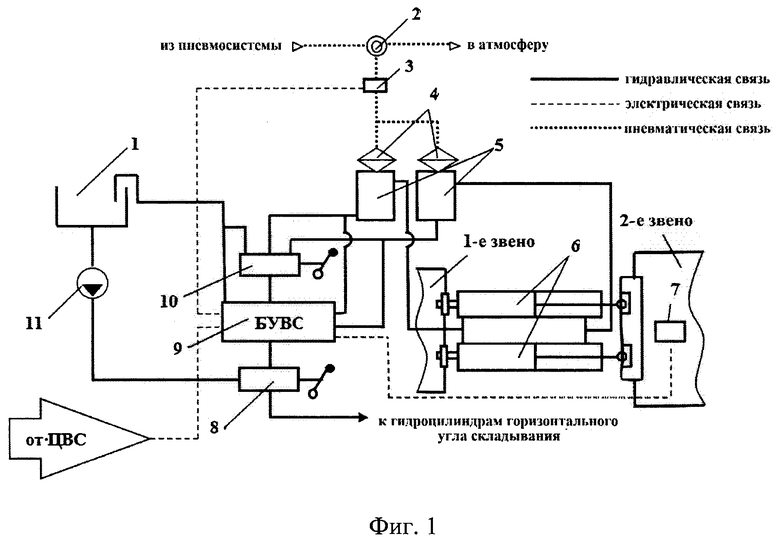
Система управления поворотно-сцепным устройством двухзвенной гусеничной машины с боевым модулем на втором звене, содержащая масляный насос, два демпфера, четыре силовых гидроцилиндра, бак, два золотника управления и соединительные трубопроводы, отличающаяся тем, что система дополнительно оснащена блоком управления вертикальным складыванием звеньев, установленным между золотниками управления, при этом блок управления вертикальным складыванием гидравлически связан через демпферы с полостями силовых гидроцилиндров и посредством электрической связи - с датчиком горизонтального положения второго звена, электромагнитным пневмоклапаном и центральной вычислительной станцией боевого модуля.
| СПОСОБ ИЗГОТОВЛЕНИЯ ЖЕСТКИХ ПЛИТ ИЗ МИНЕРАЛЬНОЙ ИЛИ СТЕКЛЯННОЙ ВАТЫ | 0 |
|
SU198200A1 |
| СЦЕПНОЕ УСТРОЙСТВО ДЛЯ МНОГОЗВЕННОГО ТРАНСПОРТЁРА | 2017 |
|
RU2674217C1 |
| RU 94030169 A1, 10.07.1996 | |||
| DE 2906636 A1, 29.11.1979 | |||
| SU 689870 A1, 05.10.1979. | |||

