Изобретение относится к автотракторной технике и может быть использовано при исследованиях тяговых качеств и возникновения паразитной мощности в системе движетель - привод - раздаточная коробка передач с принудительным приводом ведущих мостов, имеющих межколесные дифференциалы, многоосных полноприводных машин.
Известны способы снижения отрицательного влияния кинематического несоответствия на тягово-сцепные и эксплуатационные показатели полноприводных машин путем изменения нормальных реакций по ведущим осям или изменением давления воздуха в шинах (RU 2202477 С2, 2000.12.25, SU 1279874 А1, 30.12.1986). Указанные способы снижения кинематического несоответствия не всегда совместимы с техническими и технологическими требованиями, предъявляемым к многоосным тягово-транспортным машинам: на слабонесущих поверхностях давление воздуха в шинах снижают, уменьшая тем самым глубину колеи и уплотнение почвы (важно для полей). Перераспределение вертикальных нагрузок возможно у машино-тракторных агрегатов с навесными или полунавесными машинами с целью увеличения сцепного веса (снижения буксования) и (или) поддержания задаваемой глубины обработки почвы.
Наиболее близким по технической сущности и результату является способ определения кинематического несоответствия (рассогласования) каждого колеса в трансмиссиях многоосных полноприводных колесных машин (SU 1200156 А23.12.85, где «рассогласования» в терминологии авторов применяется вместо несоответствия) путем замера на каждом колесе продольных и нормальных сил при ее перемещении и дальнейшего расчета по приведенной формуле.
К недостаткам указанного способа относится техническая сложность замера на каждом колесе продольных и нормальных сил, их синхронная регистрация. Известно, силы представляют собой случайный колебательный динамический процесс. И сама трансмиссия является генератором колебаний. Какое значение сил брать для расчета: мгновенные, усредненные, то за какой-то период, неясно. Также известно, что погрешность измерения пропорционально количеству параметров в расчетной формуле, и как видно в предлагаемом прототипе при большом числе используемых параметров в формуле, точность расчета будет невысокая.
Из изложенного следует, что техническая проблема, которая не могла быть решена в представленных аналогах, - это техническая сложность замера на каждом колесе продольных и нормальных сил, что ведет к погрешности определения кинематического рассогласования.
Технический результат предлагаемого изобретения - упрощение и повышение точности измерения кинематического несоответствия многоосных полноприводных машин с межколесными дифференциалами и принудительным приводом мостов.
Для решения указанной проблемы, предварительно одно из смежных колес каждого из i-1 мостов (i - количество ведущих мостов, один из них не вывешивают, является базовым, по отношению к которому и определяют несоответствие) вывешивают над опорной поверхностью до их полного силового размыкания устройством, позволяющим осуществлять перемещение машины. При этом устройство для вывешивания воспринимает вес, приходящий на вывешенное колесо и передающее его от корпуса (моста, рамы) машины на опорную поверхность, позволяя перемещаться машине по прямой, криволинейной траектории или окружности, то есть иметь свои ведомые самоустанавливающиеся поворотные колеса.
Перемещение возможно осуществлять как от собственного двигателя машины (за счет колес мостов контактируемых с поверхностью), так и протаскиванием - другой машиной или лебедкой (при прямолинейном движении). В наиболее простом случае (машина 4X4) в качестве устройства применяли штатную грузоподъемную тележку для снятия агрегатов, вывешивая одно из колес ведущего моста.
При прямолинейном движении измеряют кинематическое несоответствие между мостами с вывешенными смежными колесами по отношению к i-му ведущему мосту с обоими контактируемыми колесами. Перед началом перемещения делаются отметки на колесах и поверхности, например, для повышения точности с помощью отвеса, приложенного к оси колеса, наносят метки на контактируемых и вывешенных колесах и поверхности. Задаются угловым интервалом поворота колес: обычно достаточно одного оборота (360°) колеса, с увеличением количества оборотов колес уменьшается погрешность, но потребуется большая испытательная площадка. Допускается и меньший угол поворота колес, но из-за люфтов в трансмиссии погрешность возрастет. С точки отметок перемещают машину на одинаковый выбранный угловой интервал поворота колес (при необходимости с остановками машины) до совпадения соответствующей метки на колесе по отношению к поверхности (по аналогии с первым случаем нанесения отметок), делают еще отметки на поверхности и замеряют пути, пройденные контактируемыми и вывешенными колесами. Так, при угловом интервале в 360° (1 оборот колеса) пройденный путь вывешенного колеса - это траектория центра пятна контакта, определяемого по отвесу, проходящему через ось вращения колеса.
При отсутствии кинематического несоответствия пройденные пути контактируемых и вывешенных колес ведущего моста за одинаковый угловой интервал поворота колес будут одинаковы: Ki=0. При увеличении пройденного пути вывешенным колесом за такой же угловой интервал поворота, что и контактируемое, ведущий мост будет отстающим по отношению к i-му (колеса не вывешены) мосту: Ki>0. И, наоборот, при меньшем пройденном пути вывешенным колесом по сравнению с контактируемым, ведущий мост является забегающим по отношению к i-му мосту: Ki<0.
При повороте колесной машины с классическим рулевым управлением (передние управляемые колеса) колеса переднего моста проходят больший путь, поэтому наибольший интерес представляет знание величины кинематического несоответствия между мостами при движении с минимальным радиусом поворота.
При движении по окружности вызывают затруднения измерение пройденного пути вывешенными колесами. Если контактируемые колеса при нанесении красящих веществ на колеса оставят отпечаток дуги, то у вывешенных отмечается начальная (при первом нанесении меток на колесе и поверхности перед началом перемещения) и конечная (после нанесения метки на поверхности при совершении поворота вывешенного колеса на выбранный интервал поворота) точки перемещения машины. Способом 2-х окружностей (геометрическое определение середины дуги) и способом 3-х окружностей (геометрическое определение радиуса окружности: смотри справочник по тригонометрии) определяют параметры вписанного равнобедренного треугольника для дуги (части окружности) контактируемого колеса и рассчитывают радиус поворота. Радиус вывешенного колеса отличается от радиуса контактируемого на ширину колеи. Для вывешенных колес также определяют параметры вписанного треугольника в дугу вывешенных колес. Затем по формуле Гюйгенса (смотри справочник по высшей математике) рассчитываются длины дуг (пройденные пути) контактируемых и вывешенных колес за одинаковые задаваемые угловые интервалы поворота колес.
Кинематическое несоотвествие ведущих мостов многоосных полноприводных колесных машин, имеющих межколесные дифференциалы и блокированный межосевой привод, с вывешенными колесами по отношению к центру невывешенного ведущего моста определяют по формуле:
 ,
,
где Sвi, Sкi – пути, пройденные вывешенным (поднятым) и контактируемым за одинаковые угловые интервалы поворота колес i-го моста.
Следует иметь в виду, что рассчитанное кинематическое несоответствие, компенсируемое буксованием забегающих или скольжением отстающих мостов машины в сумме составляет половину от Ki, так как при контакте с поверхностью 2-х колес моста распределяется между ними.
Пример
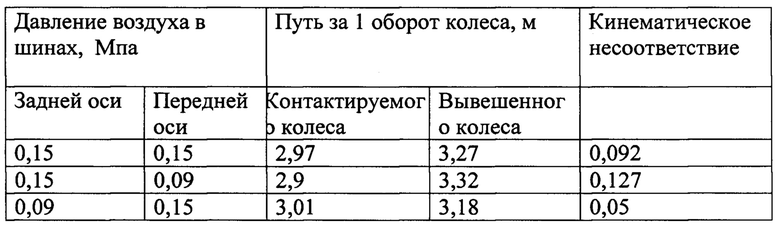
Измерение кинематического несоответствия проводилось при блокированном приводе (обгонной муфте) переднего ведущего моста трактора МТЗ-82 на штатных шинах. Задние шины колес 15,5R 38, передние 11,2-20. Давление воздуха в шинах осей изменялось (смотри таблицу). Кинематическое несоответствие определялось при прямолинейном движении трактора по горизонтальной поверхности. Вывешивалось переднее левое колесо с помощью грузоподъемной тележки, которая перемещалась совместно с трактором. Перемещение осуществлялось с помощью электрической лебедки, установленной в передней части трактора. Отметки на поверхности и колесах (шинах) наносились с помощью отвеса, проходящего через их ось вращения, перед началом движения и по завершению 1-го оборота каждым колесом моста.
Результаты проведенных испытаний по определению кинематического несоответствия при разных давлениях воздуха в шинах осей
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЛНОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2000 |
|
RU2187436C2 |
| Трансмиссия автотранспортного средства | 2018 |
|
RU2692166C1 |
| СПОСОБ СНИЖЕНИЯ ОТРИЦАТЕЛЬНОГО ВЛИЯНИЯ КИНЕМАТИЧЕСКОГО НЕСООТВЕТСТВИЯ ТРАНСМИССИИ ПОЛНОПРИВОДНЫХ МАШИН | 2000 |
|
RU2202477C2 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| МЕХАНИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА МНОГООСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2088430C1 |
| ГИДРОТРАНСФОРМАТОР ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ ДЛЯ РАЗДЕЛЬНОГО ПРИВОДА ВЕДУЩИХ МОСТОВ КОЛЕСНОГО ДВИЖИТЕЛЯ | 2022 |
|
RU2788351C1 |
| ТРАНСМИССИЯ АВТОМОБИЛЯ ВЫСОКОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2194628C1 |
| АВТОМОБИЛЬ ПОЛНОПРИВОДНОЙ | 1997 |
|
RU2120864C1 |
| Многоосное длиннобазное шасси | 2020 |
|
RU2743769C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛАМИ МНОГОПРИВОДНЫХ КОЛЕСНЫХ МАШИН | 2008 |
|
RU2361752C1 |
Изобретение относится к автотракторной технике и может быть использовано при исследованиях тяговых качеств и возникновения паразитной мощности в системе движитель - привод - раздаточная коробка передач с принудительным приводом ведущих мостов, имеющих межколесные дифференциалы, многоосных полноприводных машин. Способ заключается в том, что колесную машину перемещают по испытательному участку, предварительно одно из смежных колес i-1 ведущих мостов с межколесным дифференциалом вывешивают над опорной поверхностью до силового размыкания устройством, позволяющим перемещение машины по поверхности, делают отметки на колесах и поверхности в соответствующих местах, перемещают машину на одинаковые угловые интервалы поворота колес, измеряют пути, пройденные контактируемыми и вывешенными (поднятыми) колесами, и определяют кинематическое рассогласование (несоответствие) по отношению к центру невывешенного ведущего моста по формуле:
 ,
,
где Sвi, Sкi – пути, пройденные вывешенным и контактируемым за одинаковые угловые интервалы поворота колесами i-го моста. Устройство упрощает и повышает точность измерения кинематического несоответствия многоосных полноприводных машин с межколесными дифференциалами и принудительным приводом мостов.
Способ определения кинематического рассогласования в трансмиссиях многоосных полноприводных колесных машин, заключающийся в том, что колесную машину перемещают по испытательному участку, отличающийся тем, что предварительно одно из смежных колес i-1 ведущих мостов с межколесным дифференциалом вывешивают над опорной поверхностью до силового размыкания устройством, позволяющим перемещение машины и устройства по поверхности, перед началом движения делают отметки на колесах и поверхности, затем перемещают машину на одинаковые угловые интервалы поворота колес, измеряют пути, пройденные контактируемыми и вывешенными колесами, и определяют кинематическое рассогласование по отношению к центру невывешенного ведущего моста по формуле:
 ,
,
где Sвi, Sкi – пути, пройденные вывешенным и контактируемым за одинаковые угловые интервалы поворота колесами i-го моста.
| Способ определения кинематического рассогласования в трансмиссиях многоосных полноприводных колесных машин | 1984 |
|
SU1200156A1 |
| СПОСОБ СНИЖЕНИЯ ОТРИЦАТЕЛЬНОГО ВЛИЯНИЯ КИНЕМАТИЧЕСКОГО НЕСООТВЕТСТВИЯ ТРАНСМИССИИ ПОЛНОПРИВОДНЫХ МАШИН | 2000 |
|
RU2202477C2 |
| Способ регулирования давления воздуха в шинах колес полноприводного транспортного средства | 1983 |
|
SU1279874A1 |
| Способ выращивания монокристаллов сложных оксидов из расплава и устройство для его осуществления | 1984 |
|
SU1228526A1 |

