Изобретение относится к области строительства и может быть использовано при возведении опор строений, причалов и т.п. с помощью винтовых свай.
Наиболее близким техническим решением (прототипом) является техническое решение по патенту № 61732, E02D 7/22, опубл. 10.03.2007 Бюл. № 7, содержащее базовую машину, на платформе которой установлен кран-манипулятор с рабочим органом, несущим механизм завинчивания свай, и поворотное устройство для направления винтовых свай в вертикальном или наклонном положении, механизм завинчивания свай с патроном.
Недостатки прототипа: заниженные эксплуатационные характеристики устройства из-за:
1) использования в качестве платформы для устройства для погружения винтовых свай крупногабаритной универсальной машины, выпускаемой отечественной промышленностью, что увеличивает массо-габаритные характеристики прототипа и не позволяет использование ее на участках с ограниченными размерами;
2) выполнения поворотного устройства в виде отдельного блока, устанавливаемого на раме (платформе) базовой машины, что снижает компактность прототипа и усложняет процесс установки винтовой сваи в точку завинчивания в грунт;
3) применения механизма завинчивания свай, состоящего из двух сопряженных механизмов (гидромотора и редуктора), что снижает компактность прототипа и увеличивает массо-габаритные характеристики устройства;
4) выполнения патрона в виде втулки со сквозным продольным пазом и усиленной продольными пластинами, осью с подшипниками, что увеличивает массо-габаритные характеристики устройства и усложняет работу прототипа; 5) отсутствия пульта управления устройства, поэтому при использовании прототипа необходимо нахождение на месте завинчивания свай более одного оператора.
Технической проблемой, решаемой созданием заявленного изобретения является то, что современный потребитель нуждается в малогабаритном устройстве для закручивания винтовых свай, существенно упрощающем и активизирующем процедуру изготовления свайно-винтового фундамента в полевых условиях под брусовое или каркасное домостроение, ускоряющем процесс возведения домов, сараев, пирсов, заборов, хозяйственных построек и иных сооружений с использованием винтовых свай на небольших территориях, доступ к которым ограничен. Известно, что винтовые сваи, обладающие достаточной надежностью и прочностью и превосходной несущей способностью, позволяют вести работы в любое время года вне зависимости от типа почвы и ландшафта при минимальных затратах на монтаж; допускается начало строительство дома из бруса практически сразу после монтажа винтовых опор, что обеспечивает оперативность и скорость выполнения строительных работ и в первую очередь при решении приоритетных задач по обеспечению населения комфортным и доступным жильем.
Техническим результатом заявленного изобретения является создание устройства для погружения винтовых свай с повышенными эксплуатационными характеристиками, что достигается за счет малогабаритности самоходного гусеничного шасси, компактности механизма завинчивания свай, включающего в себя гидровращатель, состоящий из гидравлического двигателя роторно-планетарного типа, совмещающего в себе функции гидромотора и редуктора, а также компактности, сниженной массы, вездеходности и мобильности самого заявленного устройства, характеризующегося сниженной трудоемкостью и упрощением процесса завинчивания свай и погрузочно-разгрузочных работ по транспортной доставке к строительной площадке и возвращению заявленного устройства на базу.
Технический результат достигается тем, что устройство для погружения винтовых свай, содержащее базовую машину, на платформе которой установлен кран-манипулятор с рабочим органом, несущим механизм завинчивания свай, и поворотное устройство для направления винтовых свай в вертикальном или наклонном положении, механизм завинчивания свай с патроном, причем базовая машина выполнена в виде малогабаритного гусеничного шасси, поворотное устройство выполнено на конце рабочего органа, механизм завинчивания свай прикреплен к поворотному устройству и состоит из корпуса, в котором размещен гидровращатель и вал с переходником с выполненными по его периметру отверстиями, патрон выполнен в виде сменной насадки, прикрепленной к переходнику вала механизма завинчивания свай, имеется выносной пульт управления. При этом механизм завинчивания свай выполнен прикрепленным к поворотному устройству при помощи звена. При этом корпус механизма завинчивания свай выполнен в виде металлической рамы. При этом переходник выполнен грибовидной формы.
Новыми существенными отличительными признаками заявляемого технического решения являются следующие признаки:
- базовая машина выполнена в виде малогабаритного специализированного гусеничного шасси;
- поворотное устройство выполнено на конце рабочего органа;
- механизм завинчивания свай прикреплен к поворотному устройству и состоит из корпуса, в котором размещен гидровращатель и вал с переходником с выполненными по его периметру отверстиями;
- патрон выполнен в виде сменной насадки, прикрепленной к переходнику вала механизма завинчивания свай;
- имеется выносной пульт управления.
Совокупность новых существенных отличительных признаков наряду с известными из уровня техники признаками достаточна для решения указанной технической проблемы и получения обеспечиваемого изобретением технического результата - создания устройства для погружения винтовых свай с повышенными эксплуатационными характеристиками, что достигается за счет малогабаритности самоходного гусеничного шасси, компактности механизма завинчивания свай, включающего в себя гидровращатель, состоящий из гидравлического двигателя роторно-планетарного типа, совмещающего в себе функции гидромотора и редуктора, а также малогабаритности, вездеходности и мобильности, сниженной трудоемкости.
Сущность предлагаемого изобретения, его реализуемость и возможность промышленного применения иллюстрируется чертежами (фиг.1,2,3,4,5), где:
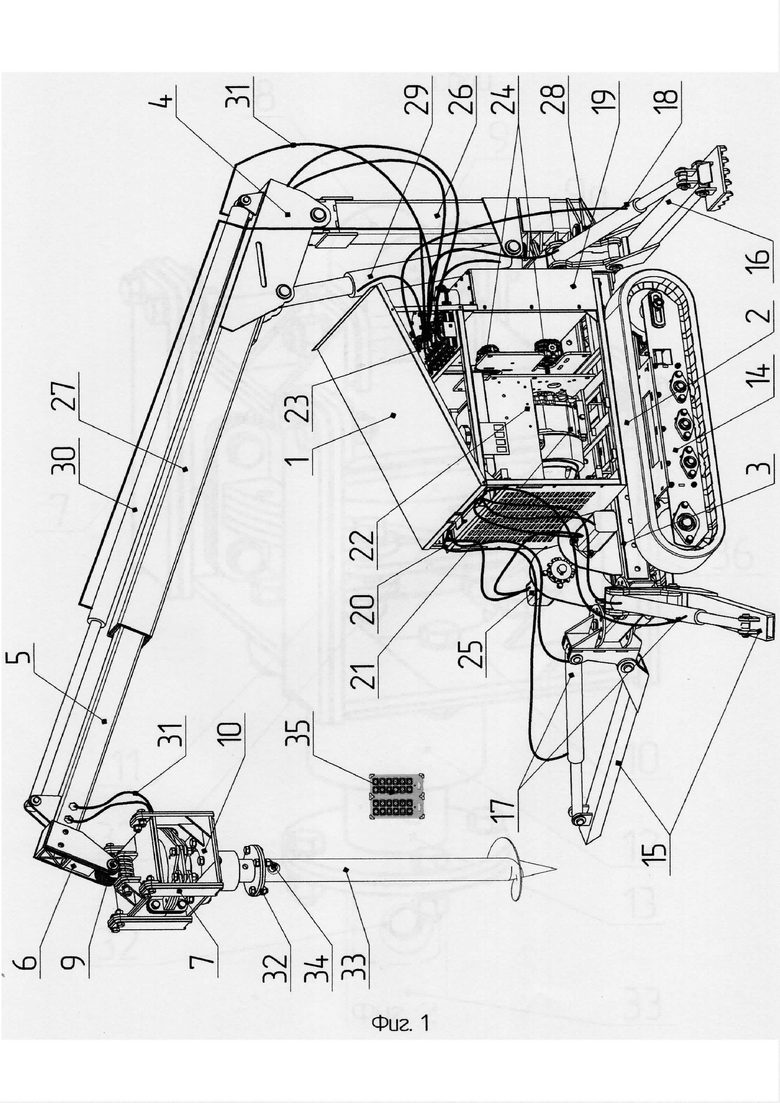
на фиг. 1 - устройство для погружения винтовых свай;
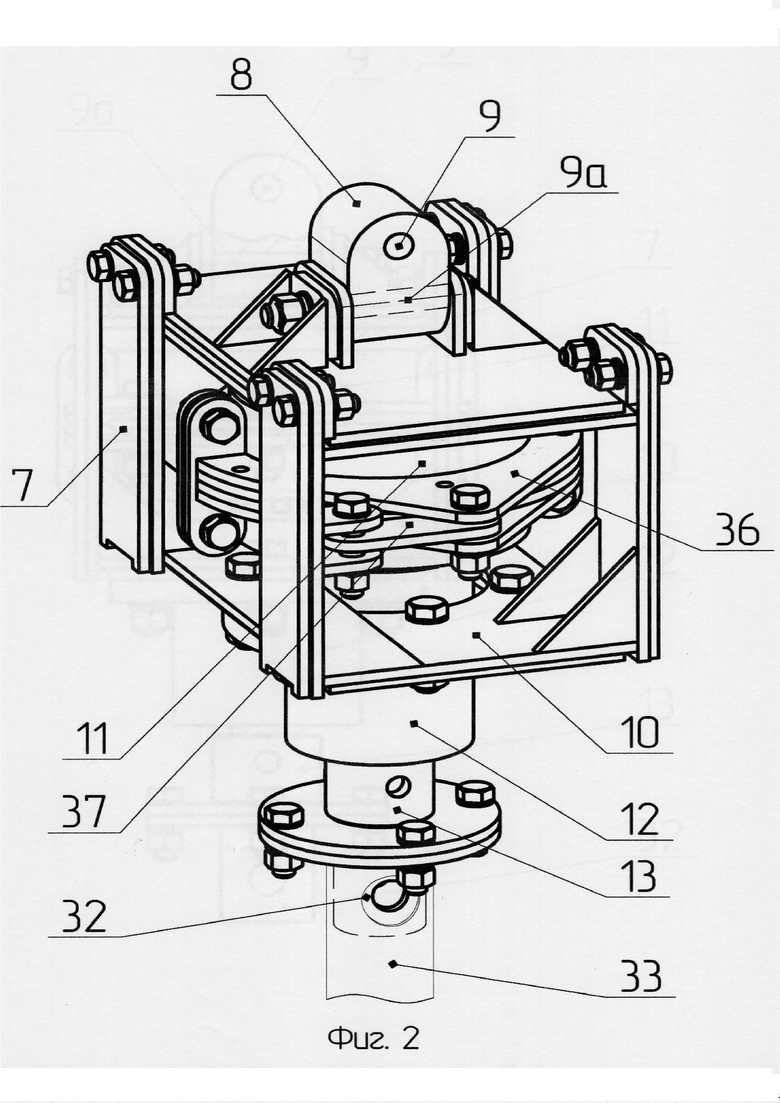
на фиг. 2 - механизм завинчивания свай в аксонометрии;
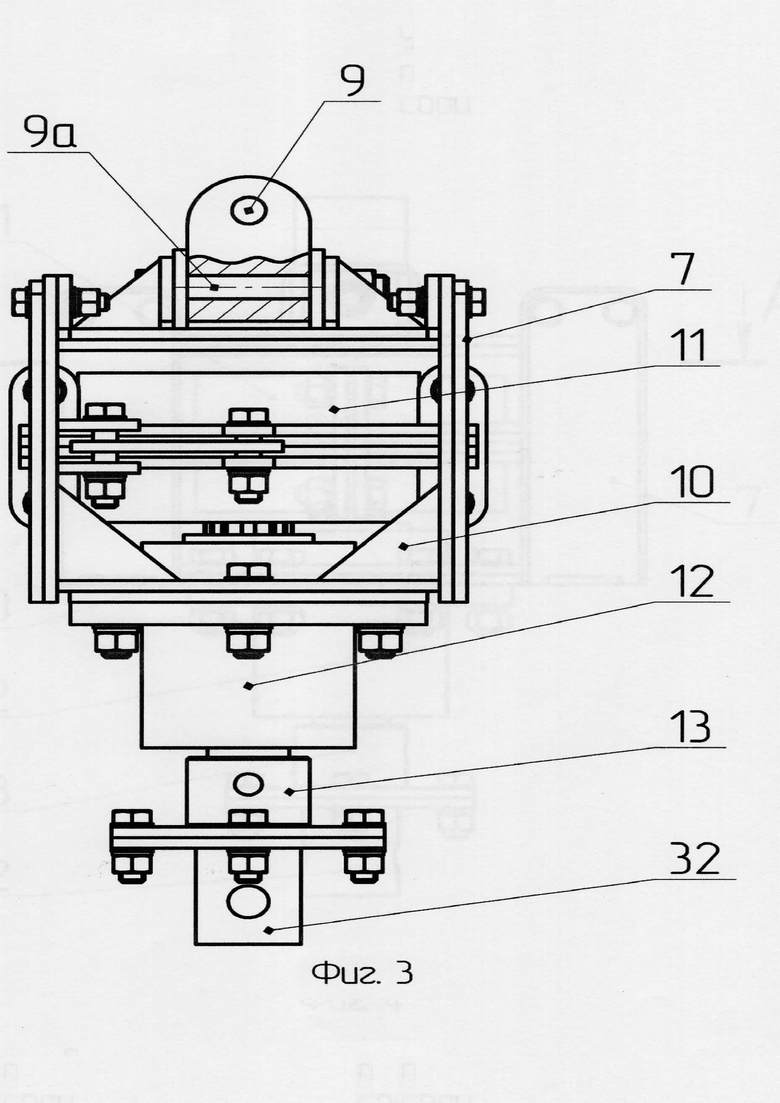
на фиг. 3 - механизм завинчивания свай (вид спереди);
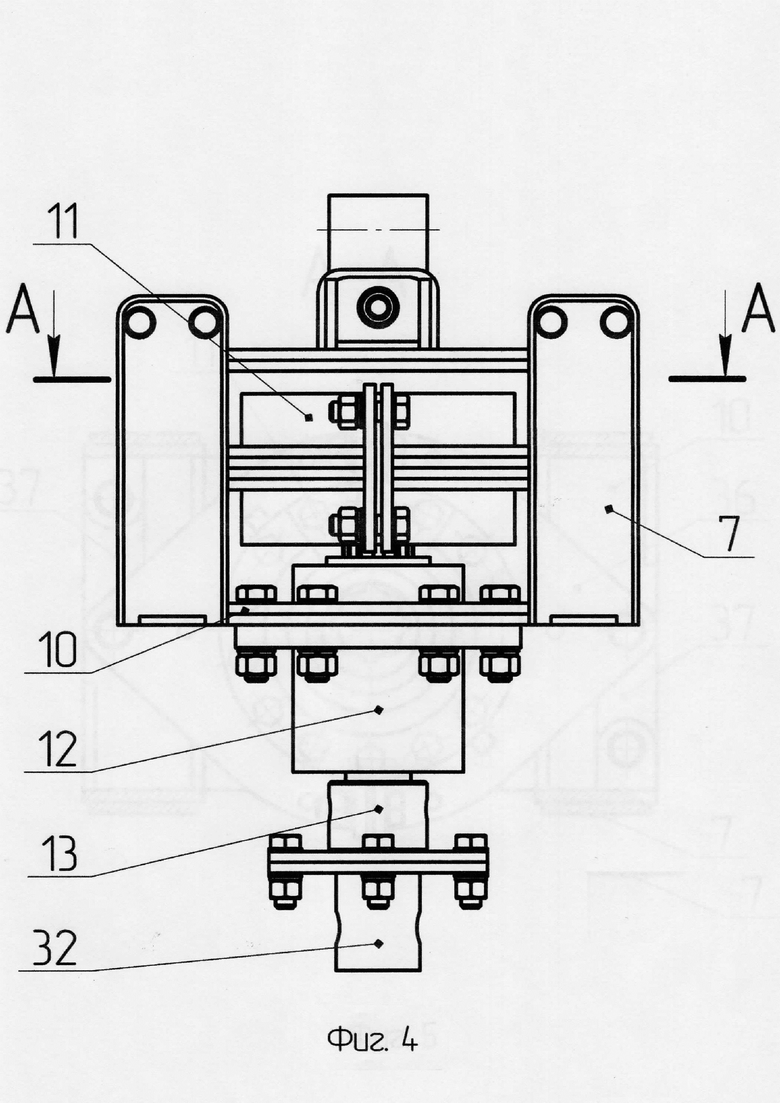
на фиг. 4 - механизм завинчивания свай (вид сбоку);
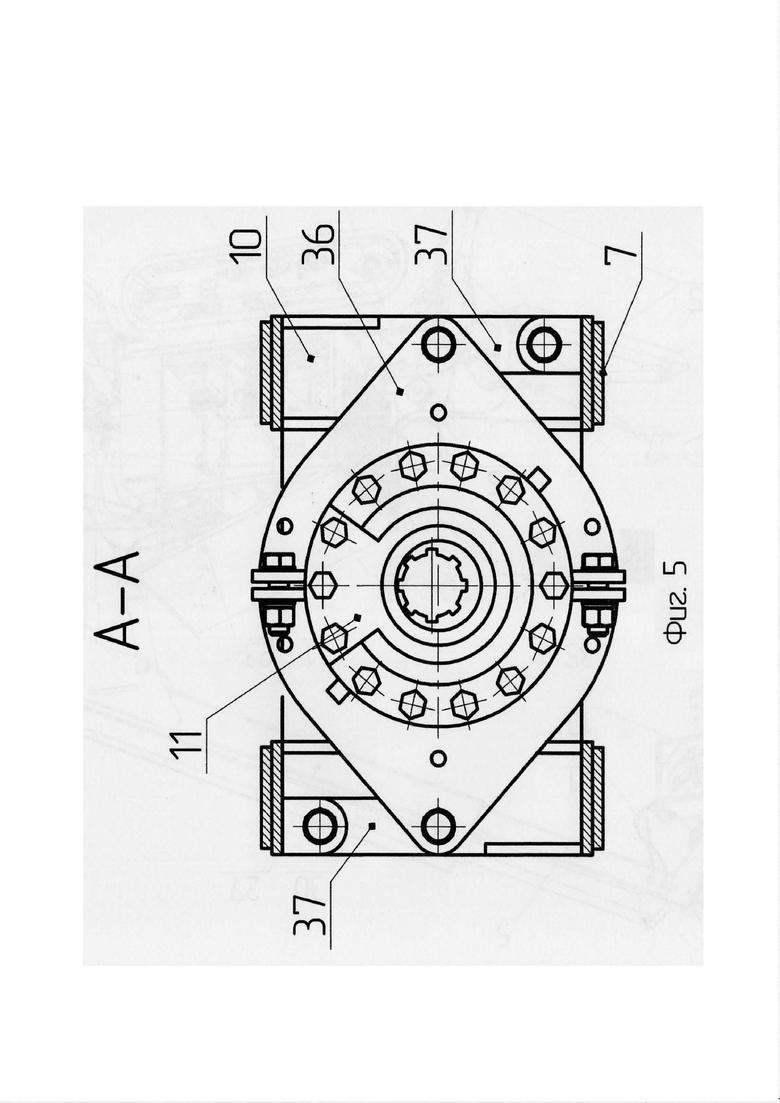
на фиг. 5 - сечение А-А механизма завинчивания свай.
На представленных чертежах имеются следующие обозначения:
1 - базовая машина;
2 - гусеничное шасси
3 - платформа базовой машины (рама);
4 - кран-манипулятор;
5 - рабочий орган (выдвижная стрела);
6 - поворотное устройство;
7 - механизм завинчивания свай;
8 - звено;
9 - отверстие;
10 - корпус;
11 - гидровращатель (гидравлический вращатель);
12 - вал;
13 - переходник;
14 - гусеничный движитель;
15,16 - аутригеры;
17,18 - гидроцилиндры (гидравлические цилиндры);
19 - бак;
20 - моторный отсек;
21 - двигатель внутреннего сгорания;
22 - блок дистанционного управления;
23 - электронный гидрораспределитель (электронный гидравлический распределитель);
24 - гидронасосы (гидравлические насосы);
25 - гидромоторы (гидравлические моторы);
26 - стойка;
27 - стрела рабочего органа;
28,29,30 - гидроцилиндры (гидравлические цилиндры);
31 - гидравлические линии;
32 - сменная насадка;
33 - винтовая свая;
34 - палец;
35 - выносной пульт управления;
36 - хомут;
37 - звенья.
Устройство (система) (фиг.1,2,3,4,5) для погружения (завинчивания в землю) винтовых свай состоит из базовой машины 1 (фиг.1), выполненной на шасси 2, на платформе (раме) 3 которой смонтированы кран-манипулятор 4 с рабочим органом (выдвижной стрелой) 5, на конце которого имеется поворотное устройство 6 с выполненным на его конце механизмом 7 завинчивания свай.
Базовая машина 1 выполнена в виде малогабаритного гусеничного (самоходного, специализированного, высокопроходимого) шасси 2.
Вновь разработанный механизм 7 (фиг.1,2,3,4,5) завинчивания свай прикреплен к поворотному устройству 6 (фиг.1) при помощи звена 8 (фиг.2), обеспечивающего поворот механизма 7 (фиг.1,2,3,74,5) не менее чем в двух плоскостях.
Звено 8 (фиг.2) выполнено в виде корпусной детали с двумя крестообразно расположенными отверстиями 9,9а (фиг.1,2,3). Отверстие 9 предназначено для подвешивания механизма 7 (фиг.1,2,3,3,5) к поворотному устройству 6 (фиг.1) и поворота механизма 7 (фиг.1,2,3,4,5) во время работы устройства в плоскости, параллельной оси рабочего органа 5 (фиг.1). Отверстие 9а (фиг.2,3) предназначено для поворота механизма 7 (фиг.1,2,3,4,5) во время работы устройства в плоскости, перпендикулярной оси рабочего органа 5 (фиг.1).
Механизм 7 (фиг.1,2,3,4,5) завинчивания свай состоит из корпуса 10 в виде металлической рамы. В корпусе 10 размещен гидравлический вращатель 11 (фиг.2,3,4,5) и вал 12 (фиг.2,3,4) с переходником 13 грибовидной формы с выполненными по его периметру отверстиями (на фиг. не показаны) для крепления сменной насадки 32 (фиг.1).
Винтовая свая 33 (фиг.1,2) устанавливается на сменную насадку 32 (фиг.1), относящуюся к механизму 7 (фиг.1,2,3,4,5) завинчивания свай, и фиксируется с помощью пальца 34 (фиг.1).
Гидравлический вращатель 11 (фиг.2,3,4,5) представляет собой стандартный реверсивный полноповоротный гидравлический двигатель роторно-планетарного типа. За счет планетарно-вращающегося действия гидравлического вращателя 11, на котором установлен вал 12, осуществляется передача крутящего момента на винтовую сваю 33 (фиг.1,2).
Гусеничное шасси 2 (фиг.1) состоит из платформы (рамы) 3 и гусеничного движителя 14, выполненного в количестве двух штук.
На гусеничном шасси 2 установлены аутригеры 15,16 (например, в количестве четырех штук), которые приводятся в движение при помощи гидравлических цилиндров 17,18, также имеются: бак 19 для хранения гидравлической жидкости, моторный отсек 20 с установленным в нем двигателем 21 внутреннего сгорания, блок 22 дистанционного управления, который принимает сигнал от выносного пульта 35 дистанционного управления и передает сигнал в соответствующий электромагнитный клапан электронного гидрораспределителя 23. На гусеничном шасси 2 установлены гидравлические насосы 24 и гидромоторы 25.
Кран-манипулятор 4 состоит из стойки 26, стрелы 27 и рабочего органа (выдвижной стрелы) 5, которые приводятся в движение гидроцилиндрами 28,29,30.
Передача гидравлической жидкости от электронного гидрораспределителя 23 передается по гидравлическим линиям 31.
Устройство для завинчивания свай оснащено выносным пультом 35 управления, что позволяет единственному оператору управлять работой всего заявленного устройства (системы), не прибегая к помощи другого исполнителя работ.
Устройство для погружения винтовых свай выполнено малогабаритным и имеет следующие массо-габаритными характеристики: масса - 1250 кГ, габаритные размеры: ДхШхВ - (2500х1100х1600) мм.
Заявленное устройство для погружения винтовых свай может быть реализовано на базе выпускаемых отечественной промышленностью (или импортных) комплектующих, в их числе гидроцилиндры, гидромоторы, гусеничные шасси, гидрораспределители, насосы, редукторы, двигатели внутреннего сгорания, гидронасосы, краны-манипуляторы со стрелами, пульты и блоки дистанционного управления, гидровращатели и т.д.
Устройство для погружения винтовых свай работает следующим образом.
Расположенный в моторном отсеке 20 двигатель внутреннего сгорания 21 вырабатывает и передает крутящий момент на гидравлические насосы 24, которые осуществляют перекачку гидравлической жидкости из бака 19 в электронный гидрораспределитель 23. Электронный гидрораспределитель 23 получает электропитание от аккумулятора (фиг. не показан), подзаряжаемого генератором (на фиг. не показан). Электронный гидрораспределитель 23 согласно сигналам от блока 22 дистанционного управления, управляемого с помощью выносного пульта 35 управления, направляет гидравлическую жидкость по гидролиниям 31 в гидромоторы 25, гидроцилиндры 17,18,28,29,30 и гидровращатель 11 (фиг.2,3,4,5). Гидроцилиндр 28 (фиг.1) осуществляет поворот стойки 26 крана-манипулятора 4.
Гидроцилиндр 29 осуществляет подъем и опускание стрелы 27. Гидроцилиндр 30 осуществляет выдвижение рабочего органа 5. Гидроцилиндры 17,18 осуществляют подъем и опускание аутригеров 15,16.
Гидровращатель 11 (фиг.2,3,4,5), являющийся гидравлическим двигателем роторно-планетарного типа, который совмещает в себе функции гидромотора и редуктора, осуществляет вращательные движения, необходимые для передачи крутящего момента на винтовую сваю 33 (фиг.1,2). Гидровращатель 11 (фиг.2,3,4,5) стянут хомутом 36 (фиг.2,5), который прикреплен к корпусу 10 (фиг.1,2,3,4,5) с помощью звеньев 37 (фиг.2,5), противодействующих вращению самого гидровращателя 11 (фиг.2,3,4,5) относительно корпуса 10 (фиг.1,2,3,4,5).
Перед началом работы базовую машину 1 (фиг.1) на малогабаритном гусеничном шасси 2, работающую от двигателя внутреннего сгорания 21, управляемую одним оператором при помощи выносного пульта 35 управления, подводят к месту завинчивания винтовой сваи 33 (фиг.1,2) в грунт.
Затем базовую машину 1 (фиг.1) фиксируют на поверхности земли аутригерами 15,16, предназначенными для обеспечения стабильности работы устройства во время погружения винтовой сваи 33 (фиг.1,2) в грунт.
Далее винтовую сваю 33 устанавливают на сменную насадку 32 (фиг.1), установленную на переходник 13 (фиг.2,3,4) вала 12 гидровращателя 11(фиг.2,3,4,5), подвешенного на поворотном устройстве 6 (фиг.1) рабочего органа 5 крана-манипулятора 4, и фиксируют пальцем 34.
Телескопическая стрела 27 крана-манипулятора 4 с рабочим органом 5 находится в приподнятом состоянии. Телескопическая стрела 27 крана-манипулятора 4 с рабочим органом 5 позволяет вести монтаж (завинчивание) винтовых свай 33 (фиг. 1,2) различной длины, до 4 м.
Поворотное устройство 6 (фиг.1) позволяет гидровращателю 11 (фиг.2,3,4,5) находиться в вертикальном положении при опускании стрелы 27 (фиг.1) и при необходимости вручную отклонять гидровращатель 11 (фиг.2,3,4,5) на необходимый при монтаже винтовой сваи 33 (фиг.1,2) угол.
Цикл завинчивания винтовой сваи 33 начинают с наведения винтовой сваи 33 на точку завинчивания в грунте при помощи крана-манипулятора 4 (фиг.1). Оператор при помощи выносного пульта 35 управления включает вращение гидровращателя 11 (фиг.2,3,4,5), который передает крутящий момент через вал 12 (фиг.2,3,4), переходник 13 и сменную насадку 32 (фиг.1,2,3,4) с пальцем 34 (фиг.1) на винтовую сваю 33 (фиг.1,2).
Цикл завинчивания продолжают до тех пор, пока винтовая свая 33 не будет установлена в грунт до проектной отметки.
Погружение сваи 33 в грунт осуществляется за счет вращения соединенной со сменной насадкой 32 (фиг.1,2,3,4) винтовой сваи 33 (фиг.1,2), снабженной винтовыми лопастями (на фиг. не показаны).
Вертикальное положение винтовой сваи 33 при завинчивании ее в грунт и при одновременном опускании стрелы 27 (фиг.1) сохраняется при помощи поворотного устройства 6. Оператор при помощи выносного пульта 35 управления вручную регулирует положение рабочего органа 5 телескопической стрелы 27, сохраняя вертикальное положение сваи 33 (фиг.1,2). Вертикальное положение сваи 33 при завинчивании в грунт контролируется соответствующим уровнем (на фиг. не показан). Использование устройства позволяет осуществить погружение винтовой сваи до самой поверхности грунта.
В отличие от прототипа, где используется крупногабаритная универсальная машина в качестве платформы для устройства для завинчивания свай, в предложенном техническом решении базовая машина выполнена в виде специализированного (высокопроходимого) малогабаритного гусеничного шасси, что повышает эксплуатационные характеристики заявленного устройства за счет снижения его массо-габаритных свойств, позволяя использовать устройство на небольших территориях, подход к которым ограничен.
В отличие от прототипа, где поворотное устройство выполнено в виде отдельного блока, устанавливаемого на раме (платформе) базовой машины, в предложенном техническом решении поворотное устройство (предназначенное для направления винтовых свай в вертикальном или наклонном положении) выполнено на конце рабочего органа, что способствует компактности устройства и упрощению процесса установки винтовой сваи в точку ее погружения в землю.
В отличие от прототипа, где механизм завинчивания свай состоит из двух сопряженных механизмов: гидромотора и редуктора, в предложенном техническом решении компактный механизм завинчивания свай, включающий в себя гидровращатель, состоящий из гидравлического двигателя роторно-планетарного типа, совмещающего в себе функции гидромотора и редуктора, прикреплен к поворотному устройству и состоит из корпуса, в котором размещен гидровращатель, и вала с переходником с выполненными по его периметру отверстиями, что повышает компактность и снижает массогабаритные характеристики заявленного устройства.
В отличие от прототипа, где патрон выполнен в виде втулки со сквозным продольным пазом, усиленной продольными пластинами, осью с подшипниками, в предложенном техническом решении патрон выполнен в виде сменной насадки, прикрепленной к переходнику вала механизма завинчивания свай, что понижает массо-габаритные характеристики устройства и упрощает работу устройства.
Наличие выносного пульта управления в предложенном техническом решении снижает трудоемкость выполняемых работ по завинчиванию свай за счет возможности управления процессом погружения винтовых свай в грунт всего лишь одним единственным оператором.
Предложенное малогабаритное техническое средство позволяет перемещать его к месту использования и обратно на универсальной грузовой технике, что повышает его мобильность и снижает трудоемкость погрузочно-разгрузочных работ по транспортной доставке заявленного устройства к строительной площадке и возвращению его на базу.
Использование специализированного гусеничного шасси обеспечивает передвижение устройства в условиях бездорожья строительной площадки. Малогабаритность предложенного технического решения позволяет использовать его на участках с ограниченными размерами для строительства.
Использование заявленного устройства позволяет повысить производительность строительных работ, в том числе при возведении жилья для качественной жизни населения (включая территории за пределами мегаполисов).
В совокупности все указанное повышает эксплуатационные характеристики предложенного технического решения.
Предложенное техническое решение, имеющее конструктивное единство, реализует общее функциональное назначение (функциональное единство).
В уровне техники не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения.
Предложенное техническое решение явным образом не следует из уровня техники. В процессе патентного поиска не выявлены технические решения, совпадающие с его существенными отличительными признаками, следовательно, оно удовлетворяет условию патентоспособности «изобретательский уровень».
Заявитель апробировал (испытал) предложенное устройство в процессе погружения (завинчивания) винтовых свай в землю, что подтвердило его назначение, реализуемость и работоспособность, в связи с чем заявленное изобретение соответствует условию патентоспособности "промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ БУРЕНИЯ СКВАЖИН В СКАЛЬНЫХ ПОРОДАХ | 2023 |
|
RU2819392C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| РОБОТИЗИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ТРАКТОР-ВЕЗДЕХОД | 2022 |
|
RU2783560C1 |
| Самоходное бронированное транспортное средство обеспечения разминирования и подготовки объектов к разрушению и крепление для установки навесного оборудования | 2017 |
|
RU2648659C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Установка для завинчивания винтовых анкеров | 2021 |
|
RU2775250C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| СВАЙНЫЙ КОПЕР | 1997 |
|
RU2132905C1 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| КРАН-МАНИПУЛЯТОР НА ГРУЗОВОМ АВТОМОБИЛЕ | 2013 |
|
RU2545698C1 |
Изобретение относится к области строительства и может быть использовано при возведении опор строений, причалов и т.п. с помощью винтовых свай. Устройство для погружения винтовых свай содержит базовую машину, на платформе которой установлен кран-манипулятор с рабочим органом, несущим механизм завинчивания свай, и поворотное устройство для направления винтовых свай в вертикальном или наклонном положении, механизм завинчивания свай с патроном. Базовая машина выполнена в виде малогабаритного гусеничного шасси. Поворотное устройство выполнено на конце рабочего органа. Механизм завинчивания свай прикреплен к поворотному устройству и состоит из корпуса, в котором размещен гидровращатель и вал с переходником с выполненными по его периметру отверстиями. Патрон выполнен в виде сменной насадки, прикрепленной к переходнику вала механизма завинчивания свай, имеется выносной пульт управления. Технический результат состоит в обеспечении создания устройства для погружения винтовых свай с повышенными эксплуатационными характеристиками, а также компактности, сниженной массы, вездеходности и мобильности самого заявленного устройства, характеризующегося сниженной трудоемкостью и упрощением процесса завинчивания свай и погрузочно-разгрузочных работ по транспортной доставке к строительной площадке и возвращению заявленного устройства на базу. 3 з.п. ф-лы, 5 ил.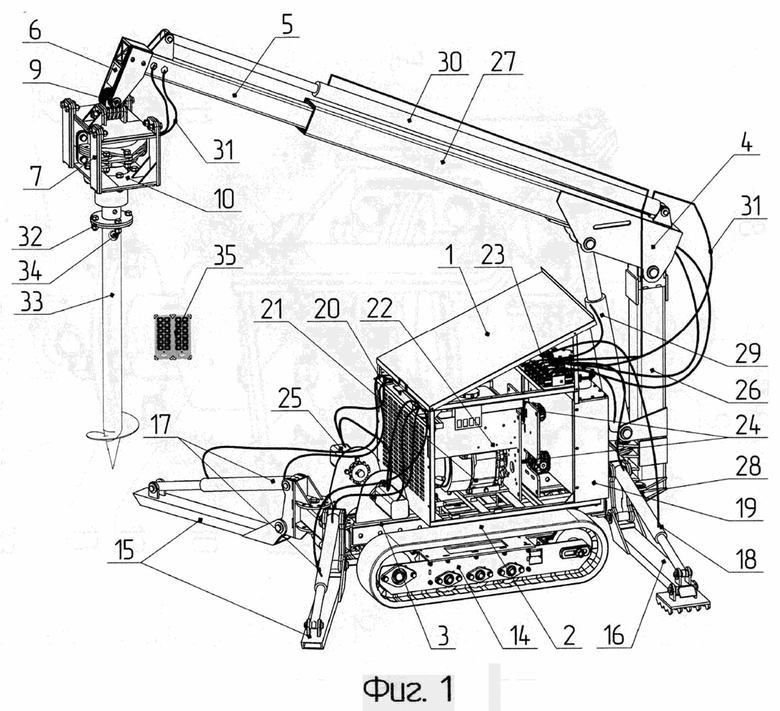
1. Устройство для погружения винтовых свай, содержащее базовую машину, на платформе которой установлен кран-манипулятор с рабочим органом, несущим механизм завинчивания свай, и поворотное устройство для направления винтовых свай в вертикальном или наклонном положении, механизм завинчивания свай с патроном, отличающееся тем, что базовая машина выполнена в виде малогабаритного гусеничного шасси, поворотное устройство выполнено на конце рабочего органа, механизм завинчивания свай прикреплен к поворотному устройству и состоит из корпуса, в котором размещен гидровращатель и вал с переходником с выполненными по его периметру отверстиями, патрон выполнен в виде сменной насадки, прикрепленной к переходнику вала механизма завинчивания свай, а также имеется выносной пульт управления.
2. Устройство по п.1, отличающееся тем, что механизм завинчивания свай выполнен прикрепленным к поворотному устройству при помощи звена.
3. Устройство по п.1, отличающееся тем, что корпус механизма завинчивания свай выполнен в виде металлической рамы.
4. Устройство по п.1, отличающееся тем, что переходник выполнен грибовидной формы.
| УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ АППАРАТУРЫ | 1939 |
|
SU61732A1 |
| УСТРОЙСТВО ДЛЯ ЗАВИНЧИВАНИЯ СВАЙ | 2008 |
|
RU2374391C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ МЕТАЛЛОВ ЭЛЕКТРОИСКРОВЫМ СПОСОБОМ | 1949 |
|
SU85497A1 |
| RU 188293 U1, 04.04.2019 | |||
| УСТРОЙСТВО ДЛЯ ВРАЩАТЕЛЬНОГО ПОГРУЖЕНИЯ СЕКЦИЙ РАБОЧЕГО ИНСТРУМЕНТА В ГРУНТ И СЕКЦИЯ РАБОЧЕГО ИНСТРУМЕНТА ДЛЯ ЭТОГО УСТРОЙСТВА | 2014 |
|
RU2554625C1 |
| US 5066168 A1, 19.11.1991 | |||
| US 20140190275 A1, 10.07.2014. | |||

