Изобретение относится к сельскохозяйственному машиностроению, в частности к грузоподъемным устройствам.
Известно заднее навесное устройство трактора пожарного агрегата, содержащее верхнюю ось, на которой закреплен с возможностью вращения вокруг нее полый вал с жестко установленными на нем подъемными рычагами и с шарнирно установленной посредством втулки центральной тягой, нижнюю ось для установки на ней гидрокрюка и нижних тяг, которые шарнирно соединены раскосами с подъемными рычагами, в котором с целью сокращения трудозатрат на монтаж и демонтаж навесных и прицепных орудий гидрокрюк установлен на нижней оси совместно с нижними тягами, а центральная тяга имеет длину, равную 0,43-0,45 длины нижних тяг, при этом на втулке жестко установлено приспособление для фиксации навесного орудия в транспортном положении; приспособление для фиксации выполнено в виде расположенных по обе стороны от центральной тяги щек с отверстиями, снабженных чекой (авторское свидетельство SU №969184, кл. А01В 59/042, 1982).
К недостаткам описанного устройства применительно к решаемой нами проблеме, относится то, что при навеске (монтаже) навесного крана-манипулятора невозможно в рабочем и транспортном положении на гидрокрюке транспортировать тележку для перемещения грузов. Это ограничивает функциональные и эксплуатационные возможности описанного объекта.
Известен также одноосный прицеп с грузоподъемным оборудованием, в котором с целью расширения эксплуатационных возможностей путем повышения устойчивости прицепа при работе грузоподъемного оборудования и маневренности свободный конец поворотной оси шарнирно соединен с гидроцилиндром, связанным с рамой, при этом на раме установлен фиксатор положения поворотной оси; поворотная ось выполнена с кольцевой канавкой с возможностью взаимодействия со стержнем, связанным с фиксатором (авторское свидетельство SU №1221018, кл. В62D 63/06, В60Р 1/54, 3/28, В66С 23/44, 1986).
К недостаткам одноосного прицепного грузоподъемного оборудования относятся чрезмерное усложнение конструкции, недостаточная зона обслуживания, малая грузоподъемность и ограниченная устойчивость.
Известен консольный кран, содержащий опорную колонну, несущую консоль с грузозахватным механизмом и поворотным шарниром, в котором смонтировано тормозное устройство, состоящее из втулки с тормозными дорожками, взаимодействующими с дорожками тормозных элементов, в котором с целью обеспечения регулирования усилия торможения консоли в зависимости от веса перемещаемого груза тормозные элементы выполнены в виде колец треугольного сечения, а тормозное устройство снабжено установленными с возможностью радиального перемещения клинообразными толкателями, взаимодействующими с указанными кольцами (авторское свидетельство SU №630205, кл. В66С 23/44, 1978).
К недостаткам описанного консольного крана, несмотря на то, что он имеет большую зону обслуживания, относится его стационарность.
Известен консольный кран, содержащий колонну, несущую консоль, телескопическую стрелу с грузозахватным механизмом и гидроприводы консоли и стрелы (патент GB №2161783, кл. В66С 23/36, В60Р 1/16, В60Р 1/54, 1986).
К недостаткам описанного консольного крана, несмотря на его большую зону обслуживания, относится стационарность его положения.
Известен кран-манипулятор, смонтированный на шасси транспортного средства (грузового автомобиля) между кабиной и кузовом, снабженный на верхнем срезе неподвижной части колонны механизмом поворота, стрелой, рукоятью, телескопической балкой с грузозахватным средством, их гидроприводами и опорной балкой с аутригерами (FR, патент №2559141, кл. В66С 23/44, 1985).
К недостаткам описанного крана-манипулятора относится то, что для его монтажа на шасси транспортного средства требуется подрамник и дополнительная гидростанция для управления гидроприводами колонны, стрелы, рукояти и телескопической балки.
Более близким аналогом к заявленному объекту относится навесной тракторный погрузчик, включающий поворотную стрелу с подвижными от гидроцилиндров звеньями и упоры о грунт, в котором с целью повышения устойчивости трактора относительно его продольной и поперечной оси при подъеме тяжелых грузов на большом плече упоры выполнены из тяг, образующих с рычагами гидросистемы трактора треугольные фермы, изменяющие плечи и свое положение посредством гидравлической системы трактора (авторское свидетельство SU №124745, кл. В66С 23/44,1959).
К недостаткам описанного навесного трактора погрузчика относятся ограниченная грузоподъемность.
Известен также тракторный погрузчик, колонна которого смонтирована посредством переходной плиты и вертикальных осей на заднем мосту трактора (патент GB №827598, кл. А01D 87/00, В66С 23/44, 1960).
К недостаткам описанного погрузчика относятся низкая грузоподъемность и ограниченная зона обслуживания.
Наиболее близким аналогом к заявленному объекту относится кран-манипулятор, содержащий шасси с установленным на нем опорным устройством, поворотную стрелу с приводом ее подъема и грузозахватный орган, а также пульт управления краном, согласно формуле полезной модели на шасси дополнительно установлена жестко связанная с опорным устройством траверса, которая шарнирно соединена с механизмом поворота, с расположенной на нем с возможностью вращения относительно вертикальной оси устройства колонной, причем колонна шарнирно соединена с последовательно установленными и шарнирно связанными стрелой и коленом с телескопической штангой, на конце которой размещен грузозахватный орган, а опорное устройство состоит из балки и размещенных по ее краям выносных опор, установленных с возможностью возвратно-поступательного перемещения в вертикальной и горизонтальной плоскостях, при этом привод перемещения выносных опор в вертикальной плоскости, привод механизма поворота крана, привод подъема стрелы, привод поворота колена и привод выдвижения телескопической штанги выполнены в виде гидроцилиндров, соединенных гидролиниями с баком и пультом управления в виде гидрораспределителя; выносные опоры выполнены в виде аутригеров (свидетельство полезной модели RU №17526, U1, кл. В6623С 23/04, 2001).
К недостаткам описанного крана-манипулятора относятся ограниченная зона обслуживания и невысокая грузоподъемность.
Сущность заявленного изобретения заключается в следующем.
Задача, на решение которой направлено заявленное изобретение, - расширение эксплуатационных возможностей путем повышения устойчивости крана-манипулятора в агрегате с транспортным средством в виде трактора сельскохозяйственного профиля.
Технический результат - повышение грузоподъемности, расширение зоны обслуживания и функциональных возможностей.
Указанный технический результат достигается тем, что в известном кране-манипуляторе, монтируемом на шасси транспортного средства и содержащем снабженную механизмом поворота вокруг вертикальной оси подвижную часть, размещенную в неподвижной части колонны, установленной с возможностью демонтажа посредством кронштейнов на верхней и нижней осях гидронавесной системы транспортного средства, соединенной с подвижной частью колонны и последовательно установленные и шарнирно связанные стрелу и колено с телескопической штангой, с размещенным на ее конце грузозахватным органом, установленные с возможностью перемещения в вертикальной плоскости аутригеры, привод перемещения аутригеров в вертикальной плоскости, привод механизма поворота подвесной части колонны, привод подъема стрелы, привод поворота колена и привод выдвижения телескопической штанги в виде силовых гидроцилиндров, соединенных гидролиниями с баком и пультом управления, согласно изобретению привод перемещения аутригеров в вертикальной плоскости выполнен в виде пары рычагов, двуплечих балок и опор, при этом одними концами смонтированным на концах имеющей гидропривод углового перемещения верхней оси гидронавесной системы транспортного средства, а другими концами рычаги связанны посредством шарнирно соединенных двуплечих балок с опорами.
За счет размещения опор на концах двуплечих балок, связанных рычагами с верхней осью гидронавесной системы и с шасси транспортного средства, и двумя парами аутригеров обеспечивается устойчивое положение крана-манипулятора при выполнении погрузочно-разгрузочных работ с широкой зоной обслуживания.
Изобретение поясняется чертежами.
На фиг.1 схематично изображен кран-манипулятор, смонтированный на шасси гусеничного трактора класса тяги 4 марки ВТ - 100, ВТ - 150, ВТ - 170 и класса тяги 5 - марки ВТ - 200, в рабочем положении, вид сборку.
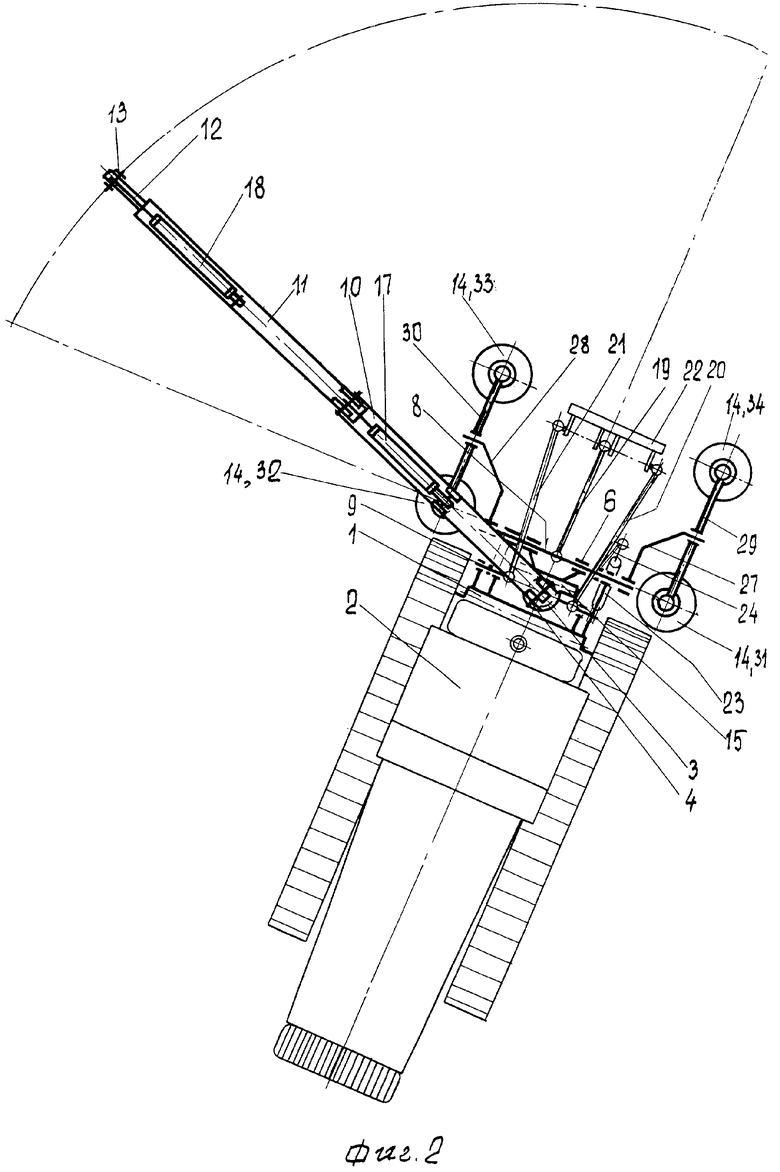
На фиг.2 - то же, вид в плане.
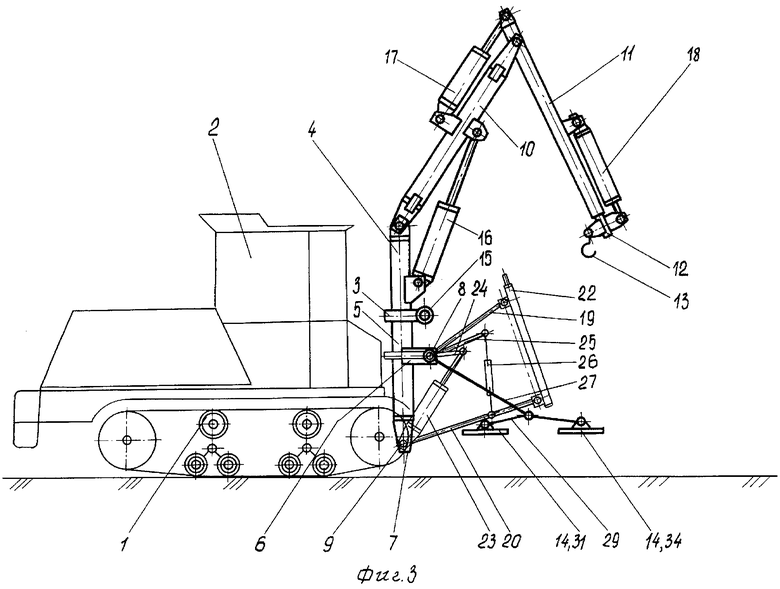
На фиг.3 - то же, в транспортном положении, вид сбоку.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Кран-манипулятор смонтирован на шасси 1 транспортного средства 2 (см. фиг.1-3). В качестве транспортного средства 2 могут быть использованы современные как колесные, так и гусеничные тракторы ОАО «Тракторная компания ВГТЗ» марок ВТ - 100, ВТ - 150, ВТ - 170, ВТ - 200. Кран-манипулятор содержит снабженную механизмом 3 поворота вокруг вертикальной оси подвижную часть 4, размещенную в неподвижной части 5 колонны. Неподвижная часть 5 колонны установлена с возможностью демонтажа посредством кронштейнов 6 и 7 на верхней оси 8 и нижней оси 9 гидронавесной системы транспортного средства. На подвижной части 4 колонны последовательно установлены и шарнирно связаны стрела 10, колено 11 с телескопической штангой 12. На свободном конце телескопической штанги 12 размещен грузозахватный орган, например крюк 13. Кран-манипулятор имеет установленные с возможностью перемещения в вертикальной плоскости аутригеры 14. Привод перемещения аутригеров 14 в вертикальной плоскости, привод механизма 3 поворота подвижной части 4 колонны, привод подъема стрелы 10, привод поворота колена 11 и привод выдвижения телескопической штанги 12 выполнены в виде силовых гидроцилиндров 15, 16, 17 и 18. Силовые гидроцилиндры 15-18 соединены гидролиниями с баком и пультом управления. Последние установлены в непосредственной близости двигателя и на шасси 1 транспортного средства 2.
Гидронавесная система транспортного средства 2 включает жестко закрепленные на шасси 1 верхнюю ось 8, нижнюю ось 9, верхнюю тягу 19, левую нижнюю тягу 20, правую нижнюю тягу 21, кронштейн 22 автоматической сцепки, силовой гидроцилиндр 23, рычаг 24 поворота верхней подвижной части оси 8, рычаги 25 с раскосами 26 для перемещения нижних тяг 20 и 21. Задние концы верхней тяги 19 и нижних тяг 20 и 21 пальцами соединены с кронштейном 22 автоматической сцепки. Передний конец верхней тяги 19 посредством шарнира установлен на верхней оси 9 гидронавесной системы. Передние концы левой и правой нижних тяг 20 и 21 посредством шарниров смонтированы на нижней оси 9. Основание силового гидроцилиндра 23 смонтировано на нижней оси 9. Рычаги 25 закреплены на верхней оси 8 также, как и рычаг 24 поворота верхней подвижной части оси 8. Силовой гидроцилиндр 23 гидравлически связан с баком и пультом управления гидравлической системы транспортного средства 2.
Привод перемещения аутригеров 14 в вертикальной плоскости выполнен в виде пары рычагов 27 и 28, двуплечих балок 29 и 30 и опор 31, 32, 33, 34.
Рычаги 27 и 28 одними (верхними) концами смонтированы на концах имеющей гидропривод углового перемещения верхней оси 8 гидронавесной системы транспортного средства 2. Другими (нижними) концами рычаги 27 и 28 связаны посредством шарнирно соединенных двуплечих балок 29 и 30. Длина плеч балок 29 и 30 выполнена равной. Заднее плечо каждой балки 29 (30) с рычагом 27 (28) связано гибкой тягой. Этим достигается строго заданное положение балок 29 и 30 по отношению к рычагам 27 и 28 в транспортном положении крана-манипулятора. Опоры 31-34 аутригеров 14 с концами балок 29 и 30 соединены сферическими шарнирами. Этим достигается плотное прилегание каждой опоры 31 (32, 33, 34) к опорной поверхности при работе крана - манипулятора. Благодаря размещению опор 31-34 на концах двуплечих балок 29 и 30 шасси 1 транспортного средства 2 при установке крана-манипулятора в рабочем положении не испытывает критических нагрузок.
Кран-манипулятор работает следующим образом.
На серийно выпускаемый трактор класса тяги 3(4; 5) в комплекте с краном-манипулятором поставляется верхняя ось 8, длина которой на 280 мм больше серийно выпускаемой в гидронавесной системе трактора. Последовательно на оси 8 и 9 монтируют неподвижную часть 5 колонны с механизмом 3 поворота и подвижную часть 4 колонны. Далее на подвижную часть 4 колонны навешивают стрелу 10, колено 11 с телескопической штангой 12. На верхнюю ось 8 устанавливают рычаги 27, 28 с балками 29, 30 и опорами 31-34. Силовые гидроцилиндры 15, 16, 17 и 18 соединяют с гидролиниями распределителя трактора. Далее проверяют работу всех механизмов. Перед началом погрузочно-разгрузочных работ кронштейном 22 автоматической сцепки разъединяют, например, прицепную тележку тракторную или др. навесную с.-х. машину. Транспортное средство 2 с краном-манипулятором ставят в непосредственной близости к объекту погрузки.
Силовым гидроцилиндром 23 через рычаг 24 приводят в движение подвижную часть верхней оси 8. При повороте верхней оси 8 пара рычагов 27 и 28 поворачивается вместе с ней, а двуплечие балки 29 и 30 опускаются вниз. Опоры 31-34 на концах балок 29 и 30 касаются опорной поверхности. Каждая опора 31 (32, 33, 34) касается поверхности микрорельефа и копирует ее поверхность так, что положение балок 29 и 30 в пространстве не проводит к перекосам шасси 1 транспортного средства. Далее механизмом 3 поворачивают вокруг вертикальной оси подвижную часть 4 колонны. Манипулируя через пульт управления штоками силовых гидроцилиндров 16, 17 и 18, крюк 13 размещают над поднимаемым грузом. После страховки груз перемещают в пространстве, например в ту же упомянутую тракторную тележку.
При завершении операции погрузки-разгрузки силовым цилиндром 23 опоры 31-34 аутригеров 14 приводит в походное положение. Кронштейном 22 автоматической сцепки через тяги 19, 20 и 21 соединяют либо прицеп тракторной тележки, либо другую навесную с.-х. машину.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к грузоподъемным устройствам. Кран-манипулятор содержит снабженную механизмом поворота вокруг вертикальной оси подвижную часть колонны, размещенную в ее неподвижной части. Неподвижная часть колонны установлена с возможностью демонтажа посредством кронштейнов на верхней и нижней осях гидронавесной системы транспортного средства. На подвижной части колонны последовательно установлены и взаимно шарнирно связаны стрела и колено с телескопической штангой. На свободном конце телескопической штанги размещен грузозахватный орган. Кран-манипулятор снабжен аутригерами. Кран-манипулятор имеет привод механизма поворота подвижной части колонны, привод подъема стрелы, привод поворота колена, привод выдвижения телескопической штанги в виде силовых гидроцилиндров. Привод перемещения аутригеров в вертикальной плоскости выполнен в виде пары рычагов. Одними концами рычаги смонтированы на концах имеющей привод углового перемещения верхней оси гидронавесной системы транспортного средства. Другими концами рычаги связаны посредством шарнирно соединенных двуплечих балок с опорами. Обеспечивается повышение грузоподъемности и расширение зоны обслуживания. 3 ил.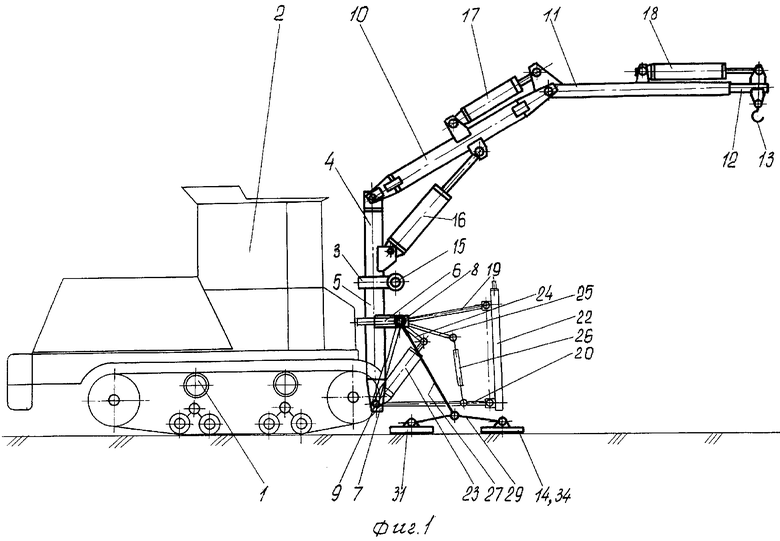
Кран-манипулятор, монтируемый на шасси транспортного средства и содержащий снабженную механизмом поворота вокруг вертикальной оси подвижную часть, размещенную в неподвижной части колонны, установленной с возможностью демонтажа посредством кронштейнов на верхней и нижней осях гидронавесной системы транспортного средства, соединенной с подвижной частью колонны, и последовательно установленные и шарнирно связанные стрелу и колено с телескопической штангой, с размещенным на ее конце грузозахватным органом, установленные с возможностью перемещения в вертикальной плоскости аутригеры, привод перемещения аутригеров в вертикальной плоскости, привод механизма поворота подвижной части колонны, привод подъема стрелы, привод поворота колена и привод выдвижения телескопической штанги в виде силовых гидроцилиндров, соединенных гидролиниями с баком и пультом управления, отличающийся тем, что привод перемещения аутригеров в вертикальной плоскости выполнен в виде пары рычагов, двуплечих балок и опор, при этом рычаги одними концами смонтированы на концах имеющей гидропривод углового перемещения верхней оси гидронавесной системы транспортного средства, а другими концами рычаги связанны посредством шарнирно соединенных двуплечих балок с опорами.
| Навесной тракторный погрузчик | 1958 |
|
SU124745A1 |
| Аутригер подъемно-транспортного средства | 1985 |
|
SU1321667A1 |
| Интерференционное устройство для измерения перемещений (его варианты) | 1981 |
|
SU1057777A1 |

