Изобретение относится к транспортным средствам с автоматизированным управлением, и может быть использовано при осуществлении дорожно-строительных работ, при выполнении железнодорожных работ (замена шпал, рихтовка, балластировка путей и т.д.), строительных работ (выравнивание площадки под строительство, срезка свай, подготовка площадки по проектным отметкам и т.д.), а также имеет возможность перемещения по пересеченной местности с препятствиями.
Известна универсальная роботизированная транспортная платформа (RU №177591 B62D 63/02, G05D 1/02, опубл 01.03.2018 г.) которая содержит несущий корпус, блок аккумуляторных батарей, пассивное и приводное активное шасси, управляющий контролер с запоминающим устройством, камеру машинного зрения, датчик ориентации и лазерную систему безопасности. Узел цифровой радиосвязи подключен к управляющему контроллеру и выполнен с возможностью обмена сообщениями по фиксированному протоколу с другими роботизированными системами и пунктом управления. Управляющий контроллер выполнен с возможностью изменения маршрута движения и расчета оптимального маршрута до точки назначения, а также коррекции движения по отклонениям показаний одометрического датчика и датчика ориентации от значений, хранящихся в запоминающем устройстве для текущей точки траектории.
Недостатком известной универсальной роботизированной транспортной платформы является возможность ограниченного использования ее в составе организованных групп роботов, функционирующих на выделенной территории цехов (складов) промышленных предприятий.
Известен трактор «МТЗ-1025 - популярная модель Минского тракторного завода. Область применения этого трактора охватывает все сферы деятельности, от сельского хозяйства, до различных отраслей промышленности. Но основная его работа, это все-таки работа в поле: похота, культивация, боронование, работа по уходу за посевами, междурядная обработка овощей и уборка урожая. Трактор является полноприводным. Задний, ведущий мост, оснащен колесными редукторами планетарного типа. Дифференциал самоблокирующийся, управляется системой. Передний мост имеет два режима работы: включен, автоматически. В автоматическом режиме включается при необходимости, например, когда пробуксовывают задние колеса. В случае ненадобности, передний мост можно полностью отключить. Важнейшими узлами моста являются: дифференциал с самоблокировкой, двухповоротные цапфы и цилиндрические планетарные редукторы. Источник: https://tractorreview.ru/traktory/mtz/mtz-1025-tehnicheskie-harakteristiki.html
Недостатком известного трактора является больший радиус разворота, малый угол подъема, имеет возможность опрокидывания, сложность конструкции.
Известен также колесный экскаватор-погрузчик JCB 3СХ, конструктивное устройство которого позволяет с использованием одной машины совмещать выполнение таких работ, как разработка грунта, планирование территории, погрузка сыпучих материалов, перемещение грузов. Экскаватор-погрузчик оборудован ковшевым отвалом с передней стороны с функцией регулирования угла наклона и высоты гидравлическим приводом, с применением для планирования грунта или перевозки материалов; оборудован экскаваторным ковшом сзади, для земляных работ. Конструктивно предусмотрена опорная система, чтобы фиксировать машину от смещения при разработке грунта. Наличие двух приводных управляемых мостов позволяет поворачивать передние и задние колеса в разных направлениях. Такие особенности обеспечивают проходимость машины на сложных грунтах, при работе на разноуровневых строительных площадках. (https://exkavacia-grunta.ru/jcb-3cx-parameters).
Экскаватор-погрузчик JCB 3СХ имеет довольно высокую производительность, большую грузоподъемность, удобное переключение всех передач и усовершенствованную гидравлическую систему и соответственно возможность осуществления работ на больших открытых площадках. Основной недостаток известного трактора - невозможность осуществлять работы в ограниченном пространстве и сложность конструкции.
Техническая проблема, решаемая предлагаемым изобретением, заключается в создании малогабаритного роботизированного многофункционального трактора-вездехода с наибольшим объемом выполняемых работ и функций, и упрощенной конструкцией, имеющего улучшенные ходовые и технологические возможности.
Существующая техническая проблема решается тем, что роботизированный многофункциональный трактор-вездеход, включающий корпус с ходовыми колесами и установленными в корпусе: двигателем внутреннего сгорания, бензобаком, маслобаком, радиатором водяного охлаждения, генератором, гидронасосом и расположенными с передней стороны ковшевым отвалом, с функцией регулирования гидравлическим приводом угла наклона и высоты, а с задней стороны - стрелой-манипулятором с рабочим органом, согласно изобретению, корпус выполнен в виде платформы, внутри которой дополнительно установлены компрессор, электрогидрораспределитель трансмиссии и электрогидрораспределитель управления ковшевым отвалом и стрелой-манипулятором с рабочим органом, блок управления, плазменный блок, сварочный блок, а в задней части трактора расположен гидровывод для подсоединения гидроинструментов, панель управления, и с помощью кронштейна к корпусу прикреплена стрела-манипулятор с рабочим органом, имеющая возможность перемещения по горизонтали по установленным в корпусе горизонтальным направляющим, и возможностью подъема и опускания - по установленным в корпусе криволинейным направляющим, при этом с обеих сторон корпуса установлены с возможностью фиксации независимые подвижные борта, на которых с помощью мотор-редукторов, соединенных с гидромоторами, закреплены задние ходовые колеса, причем в месте их присоединения к борту, в корпусе установлены опорно-поворотные устройства бортов на 180°, а в центре передней части корпуса установлено ведущее колесо, кроме того, трактор-вездеход оснащен датчиками рельефа местности и геолокации, датчиками положения рабочих органов в пространстве, датчиками положения бортов.
Ведущее колесо имеет меньший диаметр, чем ходовое колесо, и закреплено на корпусе с помощью поворотного кулака и ступицы, в которой установлен гидромотор.
Ковшевой отвал выполнен из двух подвижных частей, с возможностью образования острого или тупого угла между ними.
Стрела манипулятор выполнена складывающейся с помощью гидроцилиндров.
К стреле-манипулятору прикреплен рабочий орган в виде экскаваторного ковша. К стреле- манипулятору прикреплен рабочий орган в виде гидромолота. К стреле- манипулятору прикреплен рабочий орган в виде гидробура. К стреле- манипулятору прикреплен рабочий орган в виде гидроклещей.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в том, что трактор-вездеход работает удаленно от оператора, имеет простую конструкцию и обладает большим объемом функций и выполняемых работ.
Одним из преимуществ роботизированного многофункционального трактора-вездехода (РМТВ) является отсутствие кабины, что уменьшает высоту трактора и позволяет ему проезжать и работать в ограниченных условиях. В РМТВ предусмотрено дистанционное и аналоговое управление, что позволяет обезопасить оператора при работе в крайне опасных зонах. РМТВ может работать сам по заданной заранее программе под присмотром оператора. Благодаря установленным датчикам у оператора есть полная информационная картина происходящего на дисплее пульта управления.
Благодаря установленному дополнительному оборудованию, такому как компрессор, электрогидрораспределитель трансмиссии и электрогидрораспределитель управления ковшевым отвалом и стрелой-манипулятором с рабочим органом, плазменный блок, сварочный блок, значительно расширяется объем выполняемых работ, в частности трактор может осуществлять копание, передвижение, сканирование местности, погрузку, разгрузку, очистку территории от снега и грунта, вырывание шпал и т.д., а с помощью оператора осуществлять сварку и плазменную резку. Наличие у трактора независимых подвижных бортов, установленных на корпусе, которые имеют возможность поворота на 180°, и не имеют между собой жестких связей, могут быть развернуты поодиночке или одновременно вместе, позволяет трактору увеличивать свои габаритные размеры в длину, позволяет выполнять различные функции по преодолению различных препятствий. А также вес трактора, равномерно распределенный по всем точкам опор (колесам), позволяет ему преодолевать большинство различных препятствий до 2 м как в высоту, так и в глубину.
Наличие пятого колеса, которое является ведущим и имеет диаметр колеса меньше, чем диаметр ходовых колес, в рабочем состоянии РМТВ, когда борта разложены, оно является дополнительной пятой точкой опоры, а также способствует преодолению препятствий, и кроме того, способствует преодолению крутых подъемов с углом подъема до 50°. В транспортном положении, когда борта зафиксированы по бокам корпуса, наличие этого колеса с меньшим диаметром, позволяет РМТВ осуществлять различные маневры, в том числе разворот на месте. Отсутствие кабины и низко расположенный центр тяжести трактора позволяет ему перемещаться по склону с углом наклона до 45°. Возможность замены рабочих органов, также позволяет расширить выполняемые виды работ.
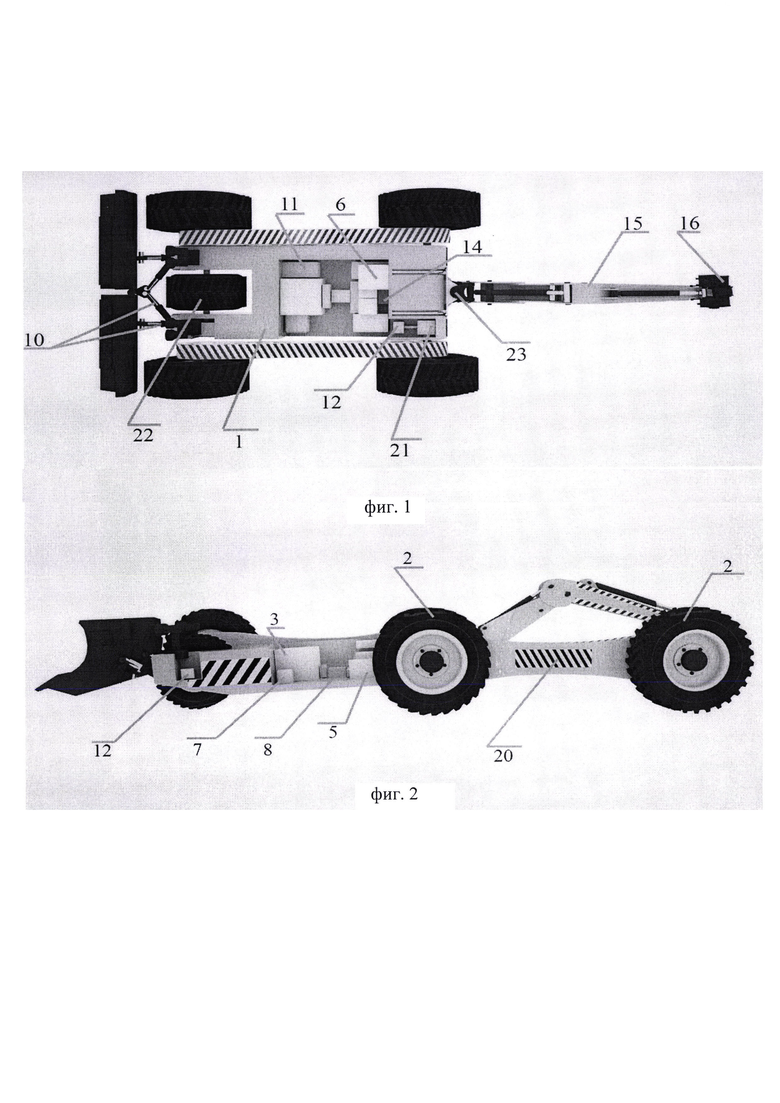
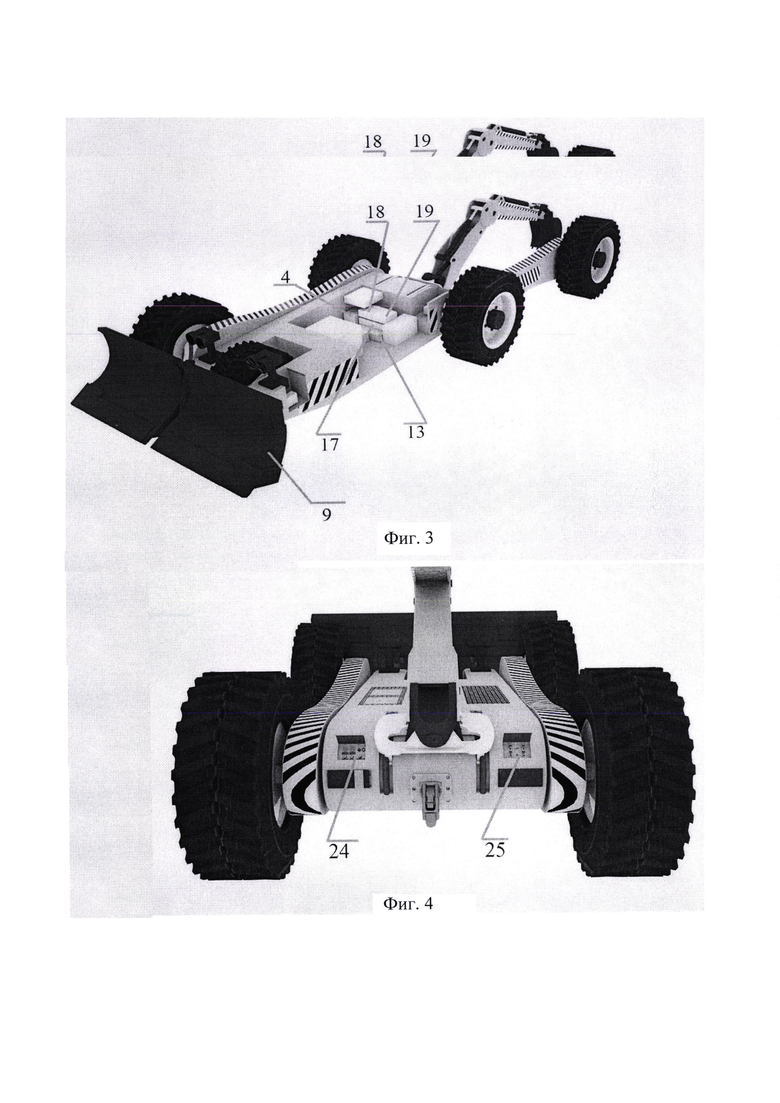
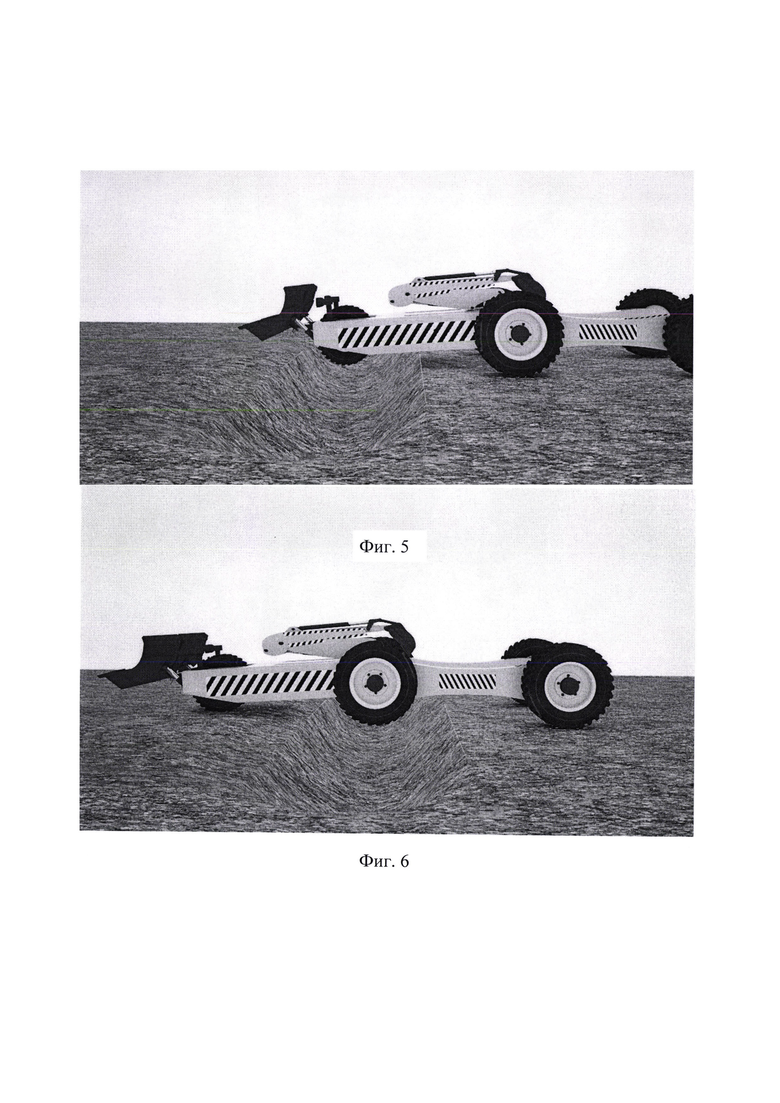
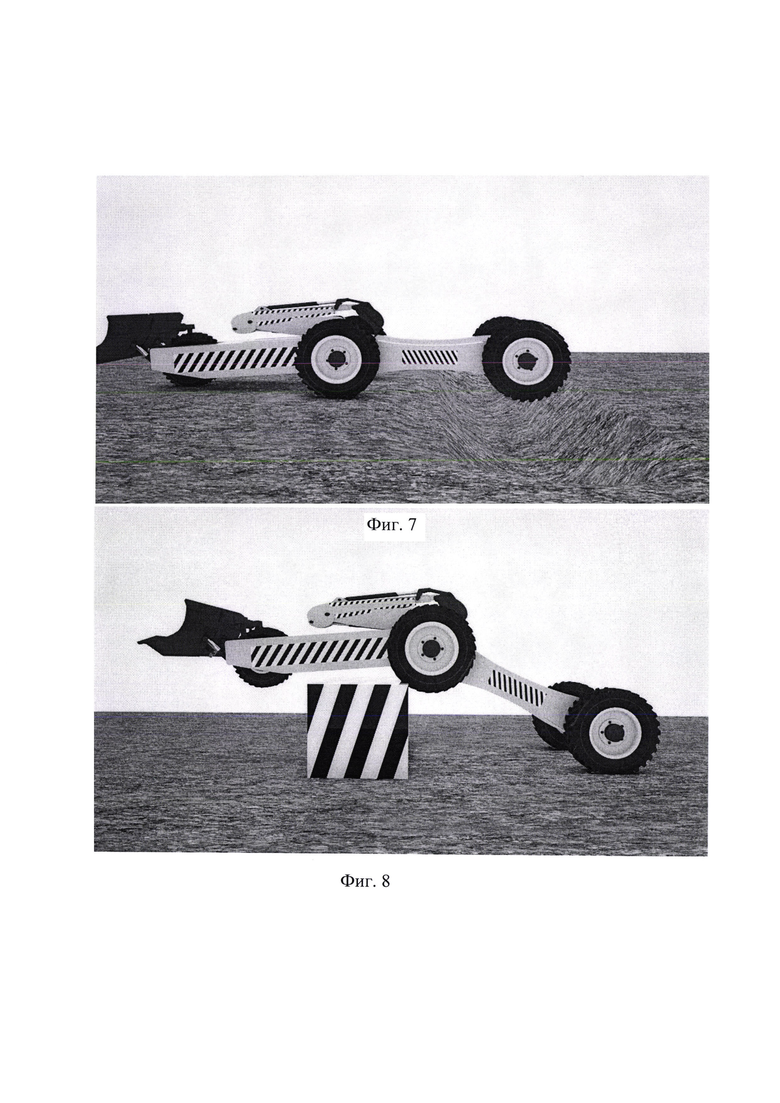
Предлагаемый трактор-вездеход проиллюстрирован чертежом, где на фиг. 1 изображен вид сверху предлагаемого трактора в транспортном положении с разложенной стрелой - манипулятором; на фиг. 2 - вид сбоку, с повернутым на 180° одним бортом; на фиг. 3 - изометрическая проекция, с повернутым на 180° одним бортом; на фиг. 4 - изображение трактора-вездехода сзади. Дополнительно предлагаемый трактор-вездеход проиллюстрирован изображениями, где на фигурах 5, 6, 7 изображено преодоление препятствий в виде глубоких ям; на фигурах 8, 9, 10 изображено преодоление препятствий в виде возвышенности; на фигурах 11, 12, 13, 14 изображено преодоление препятствия в виде возвышенности, когда трактор-вездеход наезжает на него одним задним колесом.
Роботизированный многофункциональный трактор-вездеход включает корпус 1 с ходовыми колесами 2 (передними и задними), установленными в корпусе 1 двигателем внутреннего сгорания 3, бензобаком 4, маслобаком 5, радиатором водяного охлаждения 6, генератором 7, гидронасосом 8 и расположенным с передней стороны ковшевым отвалом 9, с функцией регулирования гидравлическим приводом 10 угла наклона и высоты. Ковшевой отвал 9 выполнен из дух подвижных частей, с возможностью образования острого или тупого угла между ними. Корпус 1 выполнен в виде платформы, внутри которой дополнительно установлены компрессор 11, гидромотор 12, электрогидрораспределитель 13 трансмиссии и электрогидрораспределитель 14 управления ковшевым отвалом 9 и стрелой-манипулятором 15 с рабочим органом 16 (например, с экскаваторным ковшом), блок управления 17, плазменный блок 18, сварочный блок 19. С обеих сторон корпуса 1 установлены борта 20, на которых с помощью мотор-редукторов закреплены ходовые колеса 2. У задних ходовых колес мотор-редукторы соединены с гидромоторами 12, что позволяет колесам независимо друг от друга иметь различное направление вращения, при необходимости оператор может давать такие команды. В месте присоединения задних колес к борту 20, в корпусе установлены опорно-поворотные устройства 21 бортов на 180°. В передней части корпуса 1 установлено ведущее колесо 22, которое крепится к ступице, прикрепленной к цапфе, цапфа собрана с поворотным кулаком, который крепится к корпусу болтами, а в ступице этого колеса находится гидромотор 12. Ведущее колесо поворачивает с помощью гидроцилиндра, который крепится штоком к цапфе, а цилиндром к корпусу. Поворот осуществляется в тот момент, когда оператор подает команду на поворот.
В задней части трактора с помощью кронштейна 23 прикреплена стрела-манипулятор 15 с рабочим органом 16. Стрела-манипулятор 15 имеет возможность перемещения по горизонтали по установленным в корпусе горизонтальным направляющим, и возможность подъема и опускания - по установленным в корпусе 1 криволинейным направляющим. Датчики рельефа местности и геолокации, находятся под опорно- поворотными устройствами 21. Датчики положения рабочих органов в пространстве, находятся на рабочей грани этих рабочих органов (ковшевой отвал 9, ковш экскаватора 16). Датчики положения бортов 20 находятся в опорно-поворотных устройствах 21.
Блок управления 17 это, по сути, бортовой компьютер, который находится внутри корпуса 1 РМТВ, с помощью которого осуществляется управление всеми функциональными возможностями и механизмами. Блок управления 17 соединен кабелем с аналоговым пультом управления, с которого подаются команды для работы трактора, так же имеется джойстик на радиоуправлении. Пульт управления и джойстик находятся в корпусе трактора и могут быть свободно извлечены. Джойстик отвечает за дистанционное управление на расстоянии до 100 метров.
Бортовой компьютер считывает, обрабатывает и сохраняет информацию со всех датчиков, установленных на РМТВ, для дальнейшей работы с данными и работы в автоматическом режиме, так же бортовой компьютер дает возможность дистанционного управления и получения информации с датчиков на удаленный компьютер. На пульте и джойстике управления располагаются рычаги для управления трактором, тумблеры для включения отдельных блоков трактора, а также выводится информация с датчиков. В нерабочем состоянии пульт управления и джойстик помещаются в корпус. В задней части трактора расположена панель управления 24, в которой находится ключ зажигания для запуска двигателя и электроавтомат предохранитель, так же на панели находятся розетки 220 В и 380 В и выход для плазмореза и сварочных кабелей. Также в задней части трактора расположена панель 25 с гидровыводом для подсоединения гидроинструментов. Панели 24 и 25 имеют крышки для защиты от влаги и пыли.
РМТВ работает следующим образом.
К месту осуществления работ РМТВ доставляют с помощью спецтехники, например трала. После того, как РМТВ доставлен на объект, оператор при помощи пульта управления (джойстик, приложение для управления) запускает РМТВ, после чего начинает управление в соответствии с заданной программой. Оператор следит за выполнением запрограммированных действий и при необходимости может корректировать работу трактора. РМТВ оснащен необходимым количеством датчиков, вся информация с которых считывается бортовым компьютером блока управления 17, связанным с пультом управления.
В автоматическом режиме при помощи датчиков РМТВ определяет рабочие точки и начинает функционирование (копание, передвижение, сканирование местности, погрузку, разгрузку, очистку территории от снега и грунта, вырывание шпал).
РМТВ работает в двух режимах, рабочем и транспортном.
Смена режима РМТВ с транспортного (борта 20 находятся в сложенном состоянии) на рабочий (перекидывание бортов 20 в развернутое состояние) осуществляется нажатием кнопок на пульте управления, отвечающих за каждый борт. РМТВ фиксирует, в каком режиме он находится и от этого зависит то, как он будет продолжать работу в автоматическом режиме. При движении трактора в рабочем режиме он сохраняет плавающее состояние бортов 20, прилагая усилия для создания сцепления колес 2 с покрытием, одновременно подстраиваясь под возникающие перед ним препятствия. При выборке грунта, для устойчивости трактора, борта 20 жестко фиксируются автоматически с помощью гидромоторов, в режиме работы, если требуют условия, борта 20 можно зафиксировать в необходимое положение по усмотрению оператора. Маршрут и положение бортов сохранятся в памяти бортового компьютера, а на основании показаний датчиков, строится карта неровностей поверхности покрытия, которую можно при необходимости обработать и посмотреть на компьютере.
Плоские поверхности или поверхности с небольшими углублениями или возвышенностями, РМТВ может преодолевать как в рабочем, так и в транспортном состоянии.
Крупные препятствия (возвышенность 2×2×2 м или углубление такого же размера) преодолеваются в рабочем положении, когда борта 20 перекинуты на 180°. В этом положении длина трактора увеличивается в два раза (межосевое расстояние ходовых колес составляет 2,2 м) и он имеет пять точек опоры. При движении в направлении препятствия, например ямы шириной 2 м, трактор наезжает на нее ведущим колесом и как бы зависает в пространстве над ямой, в то время как сзади он имеет четыре точки опоры, и при продолжении движения ведущее колесо касается уже другой стороны ямы, за счет жесткости конструкции эта часть трактора переносится на другую сторону и трактор сначала имеет на этой стороне три точки опоры, а при дальнейшем движении уже имеет пять точек опоры, в результате препятствие преодолено. В этом же положении преодолеваются препятствия с углом подъема до 50° и движение по наклонной плоскости с углом наклона до 45°.
При преодолении препятствия, имеющего форму возвышенности с размерами 2×2×2 м, ведущее колесо наезжает на препятствие и когда оно находится на поверхности возвышенности, задние колеса оказываются в воздухе (из-за жесткости конструкции), а второй и третьей точкой опоры являются два других колеса. При дальнейшем движении передняя часть трактора опускается на поверхность земли, задние колеса съезжают с препятствия касаются поверхности земли, и подвижные борта также съезжают с препятствия.
Преодоление препятствия в виде возвышенности РМТВ может осуществлять также, наезжая на него одним задним колесом. При продолжении движения колесо наезжает на возвышенность, в то время как переднее колесо уже касается поверхности земли, при продолжении движения вперед, заднее колесо начинает съезжать с возвышенности, увлекая за собой подвижный борт, при этом другой подвижный борт имеет точку опоры на поверхности земли другим колесом. При продолжении движения РМТВ съезжает с возвышенности и таким образом преодолевает это препятствие.
Конструкция трактора рассчитана так, что передняя часть РМТВ с отвалом легче, чем другая часть трактора с развернутыми бортами, что позволяет передней части трактора при движении подстраиваться под рельеф поверхности.
При работе стрелы-манипулятора 15 с рабочим органом 16, трактор имеет положение с частично разложенными бортами. Управление стрелой-манипулятором 15 осуществляется через электрогидрораспределитель 14, отвечающий за работу рабочих органов, кнопки управления которым вынесены на пульт управления. Управление движением колес 2 и опорно-поворотными устройствами 21 осуществляется через электрогидрораспределитель 13 трансмиссии, кнопки управления которым также вынесены на пульт управления.
При необходимости работы с компрессорными устройствами, к трактору подключаются эти устройства и при помощи пульта управления оператор осуществляет запуск компрессора 11, расположенного в корпусе 1 РМТВ. Аналогично, для осуществления сварочно-плазменных работ и работ с гидроинструментами, оператором подключается гидроинструмент к гидровыводу на панели 25, сварочному блоку 19 и плазменному блоку 18. Сварочные и плазменные шланги спрятаны внутри корпуса 1 РМТВ и вынимаются по мере надобности до запуска данных блоков.
К двигателю внутреннего сгорания 3 посредством ременной передачи подключен генератор 7. За счет вырабатываемой этим генератором электроэнергии запитаны розетки 220 В и 380 В, сварочный блок 19 и плазменный блок 18, компрессор 11, электрогидрораспределители, бортовой компьютер, фары, габаритные огни.
Замена рабочих органов 16 стрелы-манипулятора 15, осуществляется оператором. Оператор, управляя пультом, опускает стрелу вниз и с помощью специального ключа отстегивает рабочий орган, потом поворачивает стрелу к другому рабочему органу и посредством автозахвата пристегивает нужный рабочий орган. Рабочие органы для замены могут находиться в прицепе к трактору, либо на специальной площадке.
Для работы ковшевого отвала 9 РМТВ переводится в транспортный режим (борта сложены) и оператором осуществляется управление в зависимости от поставленной задачи, либо произвести планирование территории, либо засыпать котлован.
РМТВ способен развернуться на месте вокруг своей оси, благодаря возможности отдельно управлять колесами на правом и левом бортах, такой способ разворота позволяет маневрировать в ограниченном пространстве.
Предлагаемое изобретение имеет простую конструкцию и обладает большим объемом выполняемых функций и работ, работает удаленно с помощью оператора, имеет улучшенные ходовые и технологические возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| Комбинированный агрегат биомелиорации земель с переработкой лесокустарника для утилизации щепы, древесной золы и подсева семян | 2020 |
|
RU2740173C1 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |
| СПОСОБ ДОСТАВКИ ГРУЗОВ В МЕСТА ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714785C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2018 |
|
RU2685319C1 |
| Средство транспортное роботизированное | 2023 |
|
RU2822947C1 |
| Омниколесная роботизированная грузовая тележка | 2020 |
|
RU2736553C1 |
| Роботизированное устройство для обслуживания кормового стола на животноводческих комплексах | 2020 |
|
RU2747167C1 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |



Изобретение относится к транспортным средствам с автоматизированным управлением. Роботизированный многофункциональный трактор-вездеход включает корпус в виде платформы с ходовыми колесами и установленными в корпусе двигателем, гидронасосом и ковшевым отвалом. Внутри корпуса дополнительно установлены компрессор, электрогидрораспределитель трансмиссии и электрогидрораспределитель управления ковшевым отвалом и стрелой-манипулятором с рабочим органом, блок управления, плазменный блок, сварочный блок. В задней части трактора расположен гидровывод, панель управления и стрела-манипулятор с рабочим органом. С обеих сторон корпуса установлены независимые подвижные борта, на которых с помощью мотор-редукторов закреплены задние ходовые колеса. В месте их присоединения к борту в корпусе установлены опорно-поворотные устройства бортов на 180°. В передней части корпуса установлено ведущее колесо, которое имеет меньший диаметр, чем ходовое колесо. Достигается упрощение конструкции. 7 з.п. ф-лы, 14 ил.
1. Роботизированный многофункциональный трактор-вездеход, включающий корпус с ходовыми колесами и установленными в корпусе двигателем внутреннего сгорания, бензобаком, маслобаком, радиатором водяного охлаждения, генератором, гидронасосом и расположенными с передней стороны ковшевым отвалом, с функцией регулирования гидравлическим приводом угла наклона и высоты, а с задней стороны - стрелой-манипулятором с рабочим органом, отличающийся тем, что корпус выполнен в виде платформы, внутри которой дополнительно установлены компрессор, электрогидрораспределитель трансмиссии и электрогидрораспределитель управления ковшевым отвалом и стрелой-манипулятором с рабочим органом, блок управления, плазменный блок, сварочный блок, а в задней части трактора расположен гидровывод для подсоединения гидроинструментов, панель управления и с помощью кронштейна к корпусу прикреплена стрела-манипулятор с рабочим органом, имеющая возможность перемещения по горизонтали по установленным в корпусе горизонтальным направляющим и возможность подъема и опускания по установленным в корпусе криволинейным направляющим, при этом с обеих сторон корпуса установлены с возможностью фиксации независимые подвижные борта, на которых с помощью мотор-редукторов, соединенных с гидромоторами, закреплены задние ходовые колеса, причем в месте их присоединения к борту в корпусе установлены опорно-поворотные устройства бортов на 180°, а в центре передней части корпуса установлено ведущее колесо, кроме того, трактор-вездеход оснащен датчиками рельефа местности и геолокации, датчиками положения рабочих органов в пространстве, датчиками положения бортов.
2. Трактор-вездеход по п. 1, отличающийся тем, что ведущее колесо имеет меньший диаметр, чем ходовое колесо, и закреплено на корпусе с помощью поворотного кулака и ступицы, в которой установлен гидромотор.
3. Трактор-вездеход по п. 1, отличающийся тем, что ковшевой отвал выполнен из двух подвижных частей, с возможностью образования острого или тупого угла между ними.
4. Трактор-вездеход по п. 1, отличающийся тем, что стрела-манипулятор выполнена складывающейся с помощью гидроцилиндров.
5. Трактор-вездеход по п. 1, отличающийся тем, что к стреле-манипулятору прикреплен рабочий орган в виде экскаваторного ковша.
6. Трактор-вездеход по п. 1, отличающийся тем, что к стреле-манипулятору прикреплен рабочий орган в виде гидромолота.
7. Трактор-вездеход по п. 1, отличающийся тем, что к стреле-манипулятору прикреплен рабочий орган в виде гидробура.
8. Трактор-вездеход по п. 1, отличающийся тем, что к стреле-манипулятору прикреплен рабочий орган в виде гидроклещей.
| ФУНКЦИОНАЛЬНАЯ ГИЛЬЗА БЕДРА ПРОТЕЗА ГОЛЕНИ | 0 |
|
SU177591A1 |
| РОБОТИЗИРОВАННЫЙ, МОБИЛЬНЫЙ, МОДУЛЬНЫЙ ГОРНОСПАСАТЕЛЬНЫЙ КОМПЛЕКС И СПОСОБЫ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2682298C1 |
| ЭЛЕКТРОПРИВОД постоянного ТОКА | 0 |
|
SU184330A1 |
| ФОРМИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU196942A1 |
| WO 2021019383 A1, 04.02.2021. | |||

