Изобретение относится к способу и устройству для определения размеров и скоростей частиц по интенсивности рассеянного света в режиме реального времени. Изобретение предназначено для оптимизации процессов распыления жидкостей в различных областях техники, например, при впрыске топлива в камеру сгорания, при нанесении краски на окрашиваемые поверхности.
Метод измерения Time-Shift был представлен Н.В. Семидетновым [Семидетнов Н.В. "Исследование лазерного доплеровского анемометра как прибора для измерения двухфазного расхода", Ленинградский институт точной механики и оптики, 1985], [Б.А. Павловский и Н.В. Семидетнов, "Комбинированное измерение скорости, размера и концентрации частиц в двухфазном потоке", Мпс. Техника., т. 34, No 9, с. 917-921, сентябрь 1991, doi: 10.1007/BF00980803.] в диссертации 1985 года, а коммерческая система измерений на его основе была разработана В. Шефером [W. Schafer, «Time-Shift technique for particle characterization in sprays», Technische Universitat Darmshtadt, 2012] в 2012 году.
Измерительная система, разработанная В. Шефером, основана на сочетании методов сдвига по времени Time-Shift (TS) и времяпролетов Time-Of-Flight (TOF), и требует двух световых лучей и четырех детекторов.
Это повышает эффективность и избыточность оценки сигналов рассеяния света.
Другой вариант был подробно рассмотрен в патенте [DE 102014211514, 2015-12-17, B01D 1/18; G01F 1/708; G01N 15/14], где световые участки скрещиваются с разными длинами волн.
Измерительная система получила развитие также в [WO 002013139691, 2013-09-26, G01N 15/02], [DE 102015101639, 2016-08-11, G01N 15/00; G01N 21/25; G01N 21/53; G01N 21/55] и в работе [W. Schaefer, C. Tropea, G. Wigger, and D. Eierhoff, “Spray measurements with the time-shift technique,” Meas. Sci. Technol., vol. 32, no. 10, p. 105202, Oct.2021]. Эта система [W. Schaefer, C. Tropea, G. Wigger, and D. Eierhoff, “Spray measurements with the time-shift technique,” Meas. Sci. Technol., vol. 32, no. 10, p. 105202, Oct.2021] и способ определения размеров и скоростей частиц путём оценки временных интервалов сигналов рассеяния света St, реализуемый системой, выбраны в качестве прототипа. Система включает два источника света, выровненных на расстоянии Δb друг от друга в направлении основного потока, четыре детектора A, C, B и D, расположенных по два по обе стороны от основного потока от источников света и блок расчёта. Для определения размеров и скоростей частиц по сигналам сдвига во времени, используют подход, основанный на функциях взаимной корреляции между сигналами четырёх детекторов. В предложенном подходе распределение размеров и скоростей определяют не путём обработки сигналов от отдельных капель (частиц), а из большого ансамбля сигналов, что улучшает скорость вычислений и точность, так как уменьшает влияние выбросов на результат.
Однако этот способ даёт хорошие приближения, когда траектория капли (частицы) почти ортогональна лазерному лучу, и можно предположить, что ширина лазерного луча одинакова по всему объему измерения. Кроме того, при использовании четырёх каналов приёма сигнала возникают сложности сведения оптики. Также остаётся сложным получение распределения скорости из функции взаимной корреляции, поскольку многие влияющие факторы остаются неизвестными, особенно корреляция между скоростью и амплитудой сигнала.
Таким образом, в известных системах измерений для вычисления размеров и скоростей частиц используют только временные положения интенсивностей рассеянного света, а форму сигнала не используют.
В диссертации В. Шефера [W. Schafer, «Time-Shift technique for particle characterization in sprays», Technische Universitat Darmshtadt, 2012] было доказано, что определение размеров и скоростей частиц может быть выполнено по одному сигналу рассеяния света. Однако этот метод не нашел коммерческого применения, поскольку оценка сигналов в реальном времени в то время не могла быть реализована, а модели машинного обучения были труднодоступны. По этой причине рассматривалось только алгоритмическое решение.
Физика рассеяния света во многих случаях приводит к чёткой корреляции между формой единичного сигнала и характеристиками частицы. Если эта корреляция найдена, то характеристики частиц могут быть определены только по одному сигналу рассеяния света. Поскольку для определения характеристик частиц можно использовать только один сигнал рассеяния света, можно создать измерительную аппаратуру для определения характеристик частиц, для которой требуется только один источник света и один детектор. Это снижает производственные затраты и обеспечивает более компактную конструкцию измерительного прибора.
В настоящем изобретении предлагается:
- использовать корреляцию между формой единичного сигнала и характеристиками частицы,
- делать оценку реальных сигналов рассеяния света.
Реальный сигнал рассеяния света часто сильно отличается от идеализированного или математического сигнала рассеяния света.
Математический сигнал рассеяния света - это идеализированный сигнал, который может быть смоделирован на основе известных параметров используемой измерительной аппаратуры, траектории частицы, материала частицы и т. д. Зная эти параметры, можно смоделировать сигнал рассеяния света и таким образом установить чёткую связь между нужными параметрами и сигналом рассеяния света.
Однако в реальных приложениях некоторые из этих параметров либо не полностью охарактеризованы, либо сами параметры неизвестны. Кроме того, в самом потоке существуют стохастические возмущения, которые также оказывают стохастическое влияние на рассеянные световые сигналы. Учёт всех этих эффектов при моделировании сигналов затруднён, а часто и невозможен.
Хотя и существуют программные решения и научные публикации [Л. Ли,. Г. Штегманн, С. Розенкранц, В. Шефер и К. Тропеа, "Моделирование рассеяния света от коллоидной капли с использованием поляризованного метода Монте-Карло: применение к методу сдвига по времени", Опция Экспресс, том 27, No 25, стр. 36388, декабрь 2019 г., doi: 10.1364/oe.27.036388; Л. Ли, С. Розенкранц, В. Шефер и К. Тропеа, "Рассеяние света от капли с вложенной частицей и его использование в технике сдвига во времени", Дж. Спектроскопический. Излучать. Трансф., vol. 227, pp. 20-31, Apr. 2019, doi: 10.1016/j.jqsrt.2019.01.022; Л. Ли и К. Тропеа, «Геометрическая оптика, применяемая к каплям, проходящим через сфокусированный гауссов пучок», Appl. Opt., Том 60, No 5, С. 1336, 2021, DOI: 10.1364/AO.416852], позволяющие проводить моделирование практически реального сигнала рассеяния света, однако эти решения сложны, ресурсозатратны и не подходят для коммерческого использования.
Для решения указанных проблем в данном изобретении предлагается использовать модель машинного обучения (machine learning, ML), реализующую алгоритм искусственной нейронной сети (классификатор на основе обученной свёрточной нейронной сети), и её обучение на реальных сигналах рассеяния света.
Таким образом, предлагаемым изобретением решают следующие проблемы:
- сложность известных систем и способов определения размеров и скоростей частиц на основе оценки временных интервалов сигналов рассеяния света;
- необходимость больших вычислительных мощностей.
Задача - создание более эффективного и компактного варианта уже известных системы и способа измерения под названием Time-Shift, который позволяет определять размеры и скорости частиц в потоке.
Технический результат:
- простая компактная система,
- высокая скорость и сравнимая точность определения размеров и скоростей частиц при использовании одинаковых вычислительных мощностей.
Для решения указанных выше проблем предлагается система измерения размеров и скоростей частиц на основе скоростной регистрации формы сигнала обратного рассеяния светового пучка известного профиля и обработки методом машинного обучения по калибровочным данным, которая включает:
- распылитель жидкости, позволяющий получать цепочку частиц (капель) с формой, близкой к сферической;
- источник некогерентного света, позволяющий создавать сфокусированный гауссов пучок эллиптической формы,
- детектор, установленный так, чтобы отслеживать и улавливать свет, рассеянный частицей, прошедшей через гауссов пучок эллиптической формы,
- преобразователь сигналов светорассеяния в сигналы напряжения;
- вычислительное устройство, реализующее классификатор на основе обученной свёрточной нейронной сети.
Согласно изобретению, в качестве распылителя жидкости используют генератор монодисперсных капель.
Согласно изобретению, в качестве жидкости для распыления используют прозрачные жидкости, непрозрачные жидкости, суспензию.
Согласно изобретению, в качестве источника некогерентного света для освещения области движения частиц используют диодный источник некогерентного света.
Согласно изобретению, в качестве источника некогерентного света для освещения области движения частиц используют диодный лазер.
Согласно изобретению, в качестве преобразователя сигналов рассеяния света в сигналы напряжения используют преобразователь, позволяющий получить сигнал напряжения, состоящий из 32 кадров измерений с индивидуальной длительностью 20 мс с дискретизацией 312,5 Мвыб/с, каждый из которых содержит ансамбль 1000 ± 150 отдельных сигналов рассеяния света.
Согласно изобретению, в качестве преобразователя сигналов рассеяния света в сигналы напряжения используют трансимпедансный усилитель.
Согласно изобретению, вычислительное устройств, преобразователь и детектор связаны с использованием технологии проводной передачи данных или с использованием технологии беспроводной передачи данных.
Согласно изобретению, реализуемый вычислительным устройством классификатор на основе обученной свёрточной нейронной сети состоит из блоков, каждый из которых включает свёрточный слой, содержащий произвольно необходимое количество и размер пространственных фильтров и соответствующих им карт признаков, слой пакетной нормализации, нелинейную сигмоидную функцию активации ReLu, за каждым блоком, кроме терминального блока, следует субдискретизирующий слой, а за терминальным блоком следуют исключающий слой, выравнивающий слой и заключительный полносвязный слой с выходом, обработанным нелинейной сигмовидной функцией активации.
Также предлагается реализуемый указанной системой способ измерения размеров и скоростей частиц на основе скоростной регистрации формы сигнала обратного рассеяния светового пучка известного профиля и обработки методом машинного обучения по калибровочным данным, включающий следующие этапы:
1. обучение свёрточной нейронной сети;
2. распыление жидкости распылителем с получением цепочки частиц, близкой к сферической форме;
3. освещение области движения частиц одним сфокусированным гауссовым пучком эллиптической формы, формируемым источником некогерентного света;
4. регистрация света, рассеянного частицами, прошедшими через гауссов пучок эллиптической формы, одним детектором;
5. преобразование сигналов рассеяния света в сигналы напряжения преобразователем;
6. передача сигналов напряжения на вычислительное устройство, реализующее классификатор на основе обученной свёрточной нейронной сети;
7. вычисление размеров и скоростей частиц.
Следует отметить, что далее под «размером» частицы будет пониматься диаметр частицы, так как форма распыляемых частиц близка к сферической.
Согласно изобретению, распыление жидкости в цепочку частиц, близкой к сферической форме, осуществляют генератором монодисперсных капель.
Согласно изобретению, распыляют прозрачную жидкость, непрозрачную жидкость или суспензию.
Согласно изобретению, освещение области движения частиц осуществляют диодным источником некогерентного света.
Согласно изобретению, освещение области движения частиц осуществляют диодным лазером.
Согласно изобретению, зарегистрированные детектором сигналы рассеяния света преобразуют в сигналы напряжения трансимпедансным усилителем.
Согласно изобретению, сигналы рассеяния света, сигналы напряжения передают посредством технологии проводной передачи данных, либо посредством технологии беспроводной передачи данных.
Согласно изобретению, на вычислительное устройство передают сигналы напряжения, каждый из которых состоит из 32 кадров измерений с индивидуальной длительностью 20 мс с дискретизацией 312,5 Мвыб/с, каждый из которых содержит ансамбль 1000 ± 150 отдельных сигналов рассеяния света.
Согласно изобретению, вычисление размеров и скоростей частиц осуществляют с помощью вычислительного устройства, реализующего классификатор на основе обученной свёрточной нейронной сети, состоящий из блоков, каждый из которых включает свёрточный слой, содержащий произвольно необходимое количество и размер пространственных фильтров и соответствующих им карт признаков, слой пакетной нормализации, нелинейную сигмоидную функцию активации ReLu, за каждым блоком, кроме терминального блока, следует субдискретизирующий слой, а за терминальным блоком следуют исключающий слой, выравнивающий слой и заключительный полносвязный слой с выходом, обработанным нелинейной сигмовидной функцией активации.
Сущность изобретения поясняется с помощью чертежей.
Схематичное изображение предлагаемой системы измерения размеров и скоростей частиц на основе скоростной регистрации формы сигнала обратного рассеяния светового пучка известного профиля и обработки методом машинного обучения по калибровочным данным, включающей один источник света и один детектор, показано на Фиг. 3.
Для обучения модели машинного обучения, реализующей алгоритм сверточной нейронной сети, можно использовать систему измерения и определения характеристик частиц с помощью сдвига во времени и времени пролета, включающую два источника света и четыре детектора, например, описанную в прототипе [W. Schaefer, C. Tropea, G. Wigger, and D. Eierhoff, “Spray measurements with the time-shift technique,” Meas. Sci. Technol., vol. 32, no. 10, p. 105202, Oct. 2021].
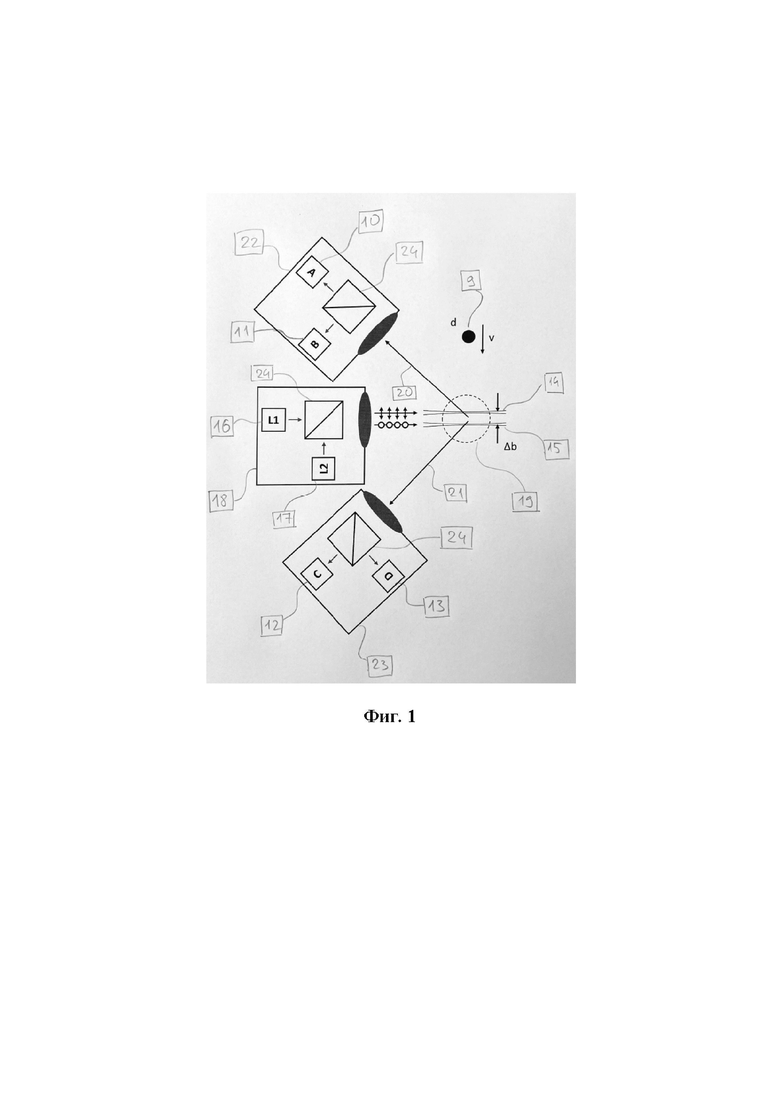
На Фиг. 1 показана схема системы измерения и определения характеристик частиц с помощью методов сдвига во времени и времени пролета, включающей два источника света и четыре детектора, которая используется для обучения сверточной нейронной сети.
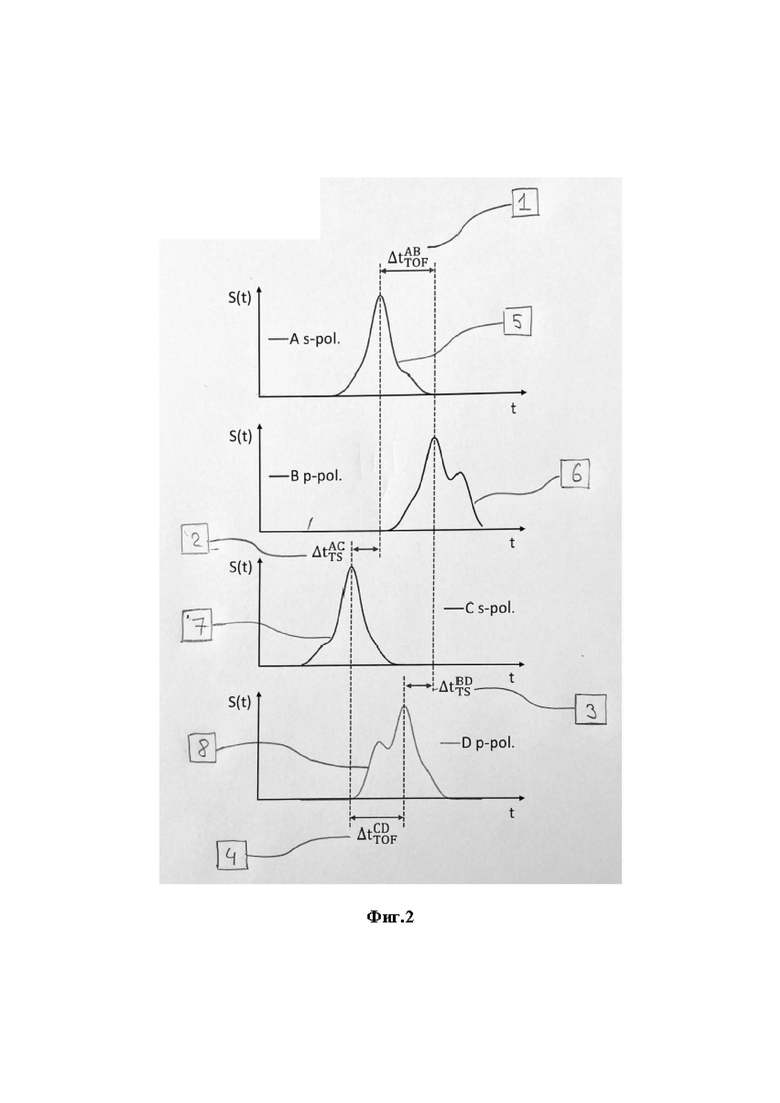
На Фиг. 2 проиллюстрирован пример серии сигналов, измеренных с помощью системы, включающей два источника света и четыре детектора, в виде зависимостей St =F(t) , где St - сигнал рассеяния света, t - время.
На чертежах обозначено: 1, 2, 3 и 4 - временные интервалы сигналов рассеяния света; 5, 6, 7 и 8 - четыре сдвинутых во времени сигнала рассеяния света; 9 - частица с диаметром d, движущаяся со скоростью v; 10, 11, 12, 13 - детекторы; 14, 15 - световые сфокусированные гауссовы пучки света; 16, 17 - источники света; 18 - оптическая система источников света; 19 - область измерения; 20, 21 - рассеянный частицей свет; 22, 23 - оптические системы детекторов; 24 - поляризационный светоделитель; Δb - расстояние между двумя источниками света, выровненными в направлении основного потока.
ΔtAC - временной интервал между сигналами детекторов, которые захватывают интенсивность рассеянного света от одного и того же лазерного луча. Обычно детекторы расположены вокруг лазерного луча. Например: детектор A находится над лазерным лучом, а детектор B - под лазерным лучом. Детекторы A и B захватывают интенсивность рассеянного света от одного и того же лазерного луча, но с разных углов или позиций. Это временное расстояние называется временным сдвигом между порядками рассеяния. Аналогичное рассмотрение применимо для ΔtBD.
ΔtAB - это временной интервал между сигналами детекторов, которые фиксируют интенсивность рассеянного света от различных лазерных лучей, L1 и L2. Лазерные лучи расположены в пространстве на некотором расстоянии друг от друга. Обычно детектор A фиксирует лазерный луч L1, в то время как детектор C фиксирует лазерный луч L2. Поскольку лазерные лучи L1 и L2 пространственно разделены, регистрация интенсивности рассеянного света от капли детекторами A и C происходит с временной задержкой. Этот временной интервал называется временем полета. Аналогичное рассмотрение применимо для Δt CD.
Чтобы детекторы A и C фиксировали только интенсивность рассеянного света от лазерного луча L1, а детекторы B и D - от лазерного луча L2, лазерные лучи поляризуются перпендикулярно друг другу. Кроме того, интенсивность рассеянного света разделяется детекторами с использованием поляризующих лучеделителей соответствующим образом. Обычно лазерный луч L1 поляризуется перпендикулярно (s-поляризация), а лазерный луч L2 - параллельно (p-поляризация). Таким образом, детекторы A и C фиксируют интенсивность рассеянного света, которая поляризована перпендикулярно, то есть детектор A фиксирует s-поляризованную интенсивность рассеянного света (A-s-pol), а детектор C - также как C-s-pol. Для детекторов B и D рассмотрение аналогичное: детектор B фиксирует p-поляризованную интенсивность рассеянного света (B-p-pol), а детектор D - соответственно D-p-pol.
Компоненты системы, Фиг. 3, установлены таким образом, чтобы регистрировать сигнал обратного рассеяния светового пучка известного профиля для одной компоненты скорости с одного ракурса. Распылитель жидкости, преобразователь и вычислительное устройство на Фиг. 3 не показаны.
В качестве распылителя жидкости можно использовать любой распылитель, позволяющий получать цепочку капель (частиц), имеющих близкую к сферической форму, например, генератор монодисперсных капель.
С целью определения размеров и скоростей частиц (капель) распылять можно любую жидкость, в том числе, прозрачную, непрозрачную, суспензию.
В предлагаемой системе для определения размеров и скоростей частиц используют только один сигнал рассеяния света, что позволяет использовать только один источник света 16 и один детектор 10. В качестве источника света для освещения области движения частиц используют диодный источник некогерентного света, позволяющий создавать сфокусированный гауссов пучок эллиптической формы. Таким источником может быть, например, диодный лазер.
Световой пучок 14 от источников света 16 фокусируется оптической системой в гауссов пучок эллиптической формы, создавая область измерения 19. При прохождении частицы 9 через световой пучок 14 в области измерения 19 происходит рассеяние света 20, которое регистрируется единственным детектором 10.
Оптические свойства светового пучка 14 и детектора 10 подбирают таким образом, чтобы эффективно отслеживать и улавливать свет, рассеянный частицей, прошедшей через гауссов пучок эллиптической формы.
Зарегистрированные детектором сигналы рассеяния света преобразуют в сигналы напряжения преобразователем сигналов и в виде сигналов напряжения передают на вычислительное устройство посредством технологии проводной передачи данных, либо посредством технологии беспроводной передачи данных.
Преобразователем сигналов может быть, например, трансимпедансный усилитель, либо любой другой преобразователь сигналов, позволяющий получить сигнал напряжения, состоящий из 32 кадров измерений с индивидуальной длительностью 20 мс с дискретизацией 312,5 Мвыб/с, каждый кадр которого содержит ансамбль 1000 ± 150 отдельных сигналов светорассеяния.
В качестве вычислительного устройства, на фиг. 3 не показано, может быть использована любая вычислительная машина, устройство или комплекс устройств, предназначенных для автоматизации процесса обработки информации, вычислений, например персональный компьютер.
В качестве носителя данных используемого вычислительного устройства может быть использован твёрдотельный накопитель SSD или жесткий диск HDD , или любой другой носитель данных.
На носителе данных, установлено программное обеспечение для определения размеров и скоростей частиц на основе скоростной регистрации формы сигнала обратного рассеяния светового пучка известного профиля, реализующее классификатор на основе обученной свёрточной нейронной сети.
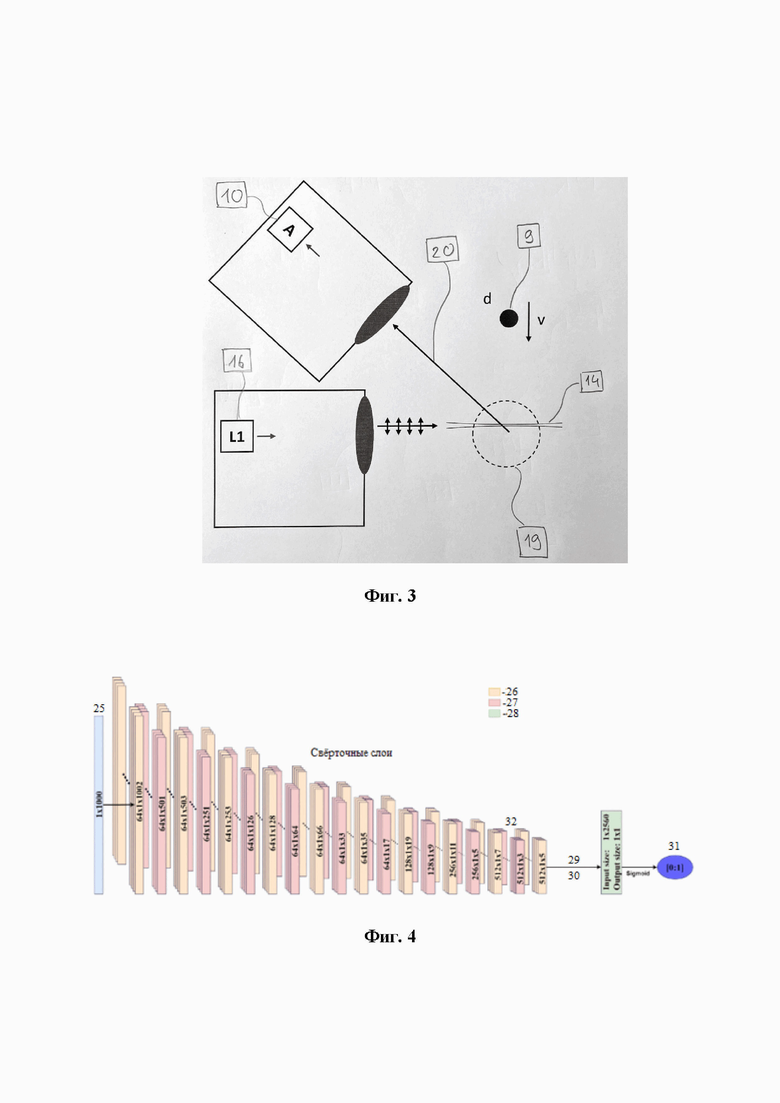
На фиг. 4 представлена архитектура алгоритма модели машинного обучения (на основе свёрточной нейронной сети), где: 25 - вход; 26 - блоки, состоящие каждый из свёрточного слоя, слоя пакетной нормализации и нелинейной сигмоидной функции активации ReLu (Rectified linear unit); 27 - субдискретизирующие слои; 28 - полносвязный слой; 29 - исключающий слой; 30 - выравнивающий слой; 31 - выход; 32 - терминальный блок.
Реализуемый вычислительным устройством классификатор на основе обученной свёрточной нейронной сети имеет блочную структуру, где каждый блок включает свёрточный слой, слой пакетной нормализации [N. Bjorck, C. P. Gomes, B. Selman, and K. Q. Weinberger, “Understanding batch normalization,” Adv. neural information processing systems 31 (2018). 18] и нелинейную сигмовидную функцию активации ReLu [A. F. Agarap, “Deep learning using rectified linear units (relu),” arXiv preprint arXiv:1803.08375 (2018)].
Каждый свёрточный слой может содержать произвольное необходимое количество и размер пространственных фильтров, и соответствующих фильтрам карт признаков, причём подбор необходимого количества свёрточных слоёв, количества и размера карт признаков осуществляют случайным перебором по сетке параметров, при этом максимизируют точность классификации на части набора обучающих ансамблей сигналов светорассеяния.
За каждым блоком 26, кроме терминального 32, следует субдискретизирующий слой 27. Субдискретизирующие слои реализуют уплотнение карты признаков выбором максимального значения с заданными значениями ядра преобразования и шага (например, ядро преобразования размером 3×3 и шаг 2, что даст на выходе карту признаков размером 0,5n×0,5m, где n и m - размер входной карты признаков).
За терминальным блоком следуют исключающий слой 29, выравнивающий слой 30 и полносвязный слой 28 с выходом 31, обработанным нелинейной сигмовидной функцией активации.
Исключающие слои зануляют случайно выбранные значения в карте признаков, исключая их из дальнейшей обработки в ходе итерации обучения, что позволяет регуляризовать обучаемую модель и предотвратить переобучение нейронной сети. Выравнивающий слой преобразует набор карт признаков в вектор признакового пространства. Полносвязный слой, либо последовательность полносвязных слоёв (обычно не более трёх), выделяет признаки более высокого уровня. Между полносвязными слоями располагаются исключающие слои, зануляющие случайно выбранные значения в векторе признаков, исключая их из дальнейшей обработки в ходе итерации обучения. Выход последнего полносвязного слоя подаётся на завершающий слой Softmax.
Нелинейная сигмоидная функция активации используется для бинарной классификации, а именно для преобразования входного значения в диапазон от отрицательной бесконечности до положительной бесконечности в значение от 0 до 1.
Свёрточная нейронная сеть устроена таким образом, что данные передаются последовательно по слоям в направлении от входа к выходному слою. Входные данные для каждого слоя являются выходными данными предыдущего слоя. Заключительный этап алгоритма - полносвязный слой с выходом, обработанным нелинейной сигмовидной функцией активации для получения результатов.
Следует понимать, что классификатор не ограничивается указанным количеством наборов блоков, количеством слоёв каждого блока, последовательностью следования блоков и слоёв.
Модель машинного обучения и её обучение на реальных сигналах рассеяния света является ядром данного изобретения.
Перед началом применения проводят обучение свёрточной нейронной сети. В процессе обучения свёрточная нейронная сеть, являющаяся частью системы, обучается сопоставлять подаваемые на вход сигналы светорассеяния с маркированными в соответствии со свойствами частиц сигналами светорассеяния, такими, как размер d, скорость v.
Для обучения нейронной сети используют известную систему измерения и определения характеристик частиц с помощью сдвига во времени и времени пролета, проиллюстрированную на Фиг. 1.
Метод сдвига по времени (TS) в основном основан на определении характеристик сигналов рассеяния света 5, 6, 7 и 8 одной частицы 9, движущейся через сформированный световой пучок 14 или 15 и рассеивающей свет. Рассеянный свет регистрируется как функция времени с помощью детекторов 10, 11 и 12, 13 в разных положениях. В зависимости от положения детектора обнаруживаются различные порядки рассеяния. Интенсивность рассеянного света порядков рассеяния и соответствующие сигналы рассеяния света 5, 6, 7 и 8 часто могут быть рассчитаны с помощью оптики Дебая или геометрической оптики.
Времяпролетный метод (TOF) в основном основан на определении характеристик сигналов рассеяния света 5, 6, 7 и 8 одной частицы 9, движущейся через различные световые пучки 14 и 15, которые пространственно смещены. Это приводит к сдвигу во времени сигналов рассеяния света. Это временное смещение 1 или 4 используется для вычисления скорости v.
Таким образом, используемая для обучения модели машинного обучения известная система измерения и определения характеристик частиц с помощью сдвига во времени и времени пролета состоит из четырех детекторов 10, 11, 12, 13 и двух источников света 16 и 17.
Два световых пучка 14 и 15 от источников света 16 и 17 накладываются друг на друга и преобразуются оптической системой 18 таким образом, что два световых участка 14 и 15 дают область измерения 19. Световые пучки 14 и 15 пространственно разделены и практически не пересекаются в области измерения. При прохождении частицы 9 через световые пучки 14 и 15 в области измерения 19 происходит рассеяние света 20 и 21, которое регистрируется четырьмя детекторами 10, 11 и 12, 13.
Оптические свойства световых пучков 14 и 15 и оптической системы детекторов 22 и 23 подобраны таким образом, что детекторы А 10 и С 12 регистрируют рассеяние света только на световом пучке от L1 14, а детекторы B 11 и D 13 - только на световом пучке от L2 15. Поскольку световые пучки L1 14 и L2 15 пространственно разделены, результирующие сигналы рассеяния света 5, 6, 7 и 8 обычно регистрируются с соответствующей разницей во времени друг от друга. Суперпозиция световых пучков может быть реализована с помощью поляризационного светоделителя 24, при этом световые пучки от L1 и L2 должны быть поляризованы перпендикулярно друг другу. Селекция рассеянного света перед детекторами A 10, B 11, C 12 и D 13 также может быть реализована с помощью поляризационного светоделителя 24. Вместо поляризационного разделения можно использовать разделение по длине волны. В этом случае вместо поляризационного светоделителя используется дихроичное зеркало 24, при этом источники света L1 и L2 имеют разные длины волн, которые могут быть наложены на это зеркало.
Несмотря на то, что детекторы А 10 и С 12 регистрируют рассеяние света на одном и том же световом пучке 14, сигналы рассеяния света 5 и 7 тем не менее смещены друг от друга во времени, поскольку детекторы А 10 и С 12 измеряют рассеяние света 20 и 21 под разными углами и положениями. Это касается и детекторов В 11 и D 13, сигналов рассеяния света 6 и 8. В результате получают четыре сдвинутых во времени сигнала рассеяния света 5, 6, 7 и 8.
Форма сигналов и их временное смещение зависят как от свойств частиц, так и от используемой системы.
Таким образом:
1) в процессе обучения оценивают четыре сигнала рассеяния света 5, 6, 7, 8, и результирующие свойства частиц, такие, например, как размер d, связывают с одним из этих четырёх сигналов рассеяния света, например 5;
2) связь между известными и рассчитанными характеристиками частиц, такими как размер d, скорость v, и выбранным сигналом рассеяния света, например, 5 используют для обучения модели машинного обучения;
3) модель машинного обучения учится присваивать выбранные характеристики частиц, такие как d, v, выбранному сигналу рассеяния света 5.
После успешного обучения модели машинного обучения состав известной системы измерения и определения характеристик частиц можно сократить, исключив компоненты, которые не являются необходимыми для генерации сигнала рассеяния света, подлежащего оценке.
В результате устройство, включающее один источник света и один детектор, достигает такой же точности, как и устройство с двумя источниками света и четырьмя детекторами. При этом уменьшаются затраты ресурсов вычислительной мощности. Причём при использовании одинаковых вычислительных мощностей уменьшается время определения размеров и скоростей частиц.
В диссертации В. Шефера [W. Schafer, «Time-Shift technique for particle characterization in sprays», Technische Universitat Darmshtadt, 2012] было доказано, что определение размера и скорости частиц может быть выполнено по одному сигналу рассеяния света. Однако этот метод не нашел коммерческого применения, поскольку оценка сигналов в реальном времени в то время не могла быть реализована, а модели машинного обучения были труднодоступны. По этой причине рассматривалось только простейшей алгоритмическое решение, когда обработка сигнала связана с детектированием максимумов и определения их положений на основе применения порога по интенсивности сигнала. В таком случае форма сигнала игнорируется, что накладывает ограничение на прозрачность капель. Если капли имеют примесь непрозрачных частиц, то дополнительно на форму сигнала накладывается (добавляется) пьедестал.
С использованием методов машинного обучения возможно определение большего количества параметров, чем на основе положения двух максимумов, как было сделано в существующем прототипе.
Важно подчеркнуть, что новый метод может быть применен для анализа частиц (капель), когда они находятся за плоским прозрачным стеклом, в отличие от метода Time-shift, когда используют два оптически сведенных детектора и расположение любого оптического элемента между детекторами и областью визирования нарушает сведение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА РЕЖИМОВ ГОРЕНИЯ ТОПЛИВА ПУТЕМ АНАЛИЗА ИЗОБРАЖЕНИЙ ФАКЕЛА ПРИ ПОМОЩИ КЛАССИФИКАТОРА НА ОСНОВЕ СВЁРТОЧНОЙ НЕЙРОННОЙ СЕТИ | 2018 |
|
RU2713850C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| МНОГОКАНАЛЬНЫЙ ДАТЧИК ПЫЛИ | 2018 |
|
RU2722066C2 |
| КОГЕРЕНТНАЯ ЛИДАРНАЯ СИСТЕМА НА ОСНОВЕ ПОЛУПРОВОДНИКОВОГО ЛАЗЕРА И УСИЛИТЕЛЯ | 2008 |
|
RU2484500C2 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2016 |
|
RU2648029C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ДИАГНОСТИКИ ПРОЦЕССА СЖИГАНИЯ ПЫЛЕУГОЛЬНОГО ТОПЛИВА В КАМЕРЕ СГОРАНИЯ | 2018 |
|
RU2715302C1 |
| Способ определения размеров броуновских частиц | 1986 |
|
SU1402850A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗЫ СНА В ДЛИТЕЛЬНОЙ ЗАПИСИ ЭЭГ | 2020 |
|
RU2751137C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНУЛОМЕТРИЧЕСКОГО СОСТАВА ВОЗДУХА ДЛЯ ДАТЧИКА ПЫЛИ БЕСКАМЕРНОГО ТИПА И МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2758038C1 |
Изобретение относится к способу и устройству для определения размеров и скоростей частиц по интенсивности рассеянного света в режиме реального времени. Система, реализующая способ измерения размеров и скоростей частиц на основе скоростной регистрации формы сигнала обратного рассеяния светового пучка известного профиля и обработки методом машинного обучения по калибровочным данным, характеризующаяся тем, что включает: распылитель жидкости, позволяющий получать цепочку частиц близкой к сферической форме, источник некогерентного света, позволяющий создавать сфокусированный гауссов пучок света эллиптической формы, детектор, установленный так, чтобы отслеживать и улавливать свет, рассеянный частицами, прошедшими через гауссов пучок света эллиптической формы, преобразователь сигналов рассеяния света в сигналы напряжения, каждый кадр которых содержит ансамбль отдельных сигналов рассеяния света; вычислительное устройство, реализующее классификатор на основе обученной свёрточной нейронной сети. Технический результат – упрощение конструкции и повышение скорости и точности определения размеров и скорости частиц. 2 н. и 26 з.п. ф-лы, 4 ил.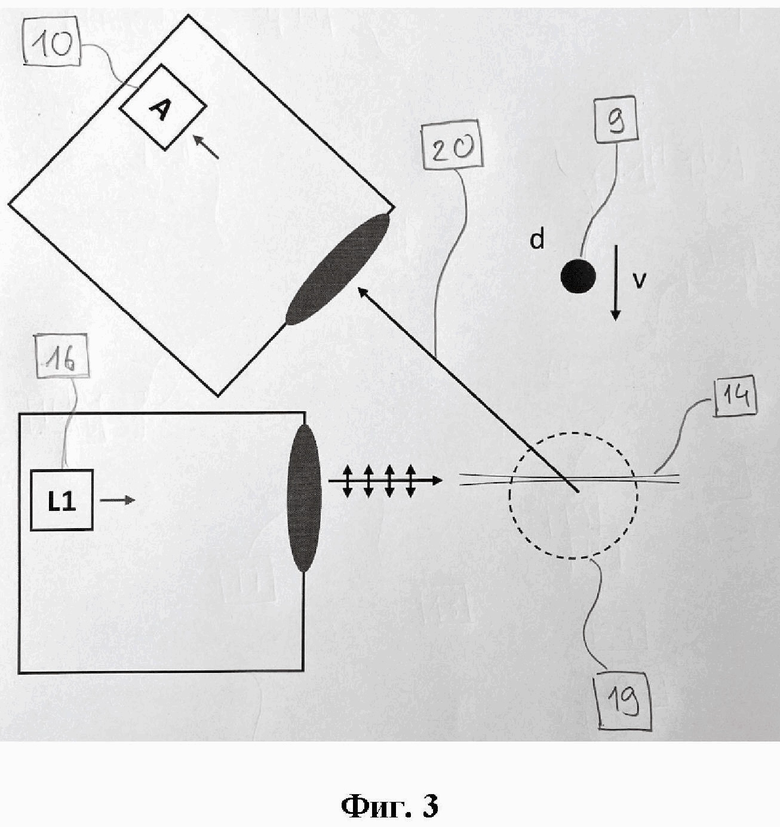
1. Система измерения размеров и скоростей частиц на основе скоростной регистрации формы сигнала обратного рассеяния светового пучка известного профиля и обработки методом машинного обучения по калибровочным данным, характеризующаяся тем, что система включает:
- распылитель жидкости, позволяющий получать цепочку частиц близкой к сферической форме,
- источник некогерентного света, позволяющий создавать сфокусированный гауссов пучок света эллиптической формы,
- детектор, установленный так, чтобы отслеживать и улавливать свет, рассеянный частицами, прошедшими через гауссов пучок света эллиптической формы,
- преобразователь сигналов рассеяния света в сигналы напряжения, каждый кадр которых содержит ансамбль отдельных сигналов рассеяния света;
- вычислительное устройство, реализующее классификатор на основе обученной свёрточной нейронной сети.
2. Система по п.1, отличающаяся тем, что в качестве распылителя жидкости используют генератор монодисперсных капель.
3. Система по п.1, отличающаяся тем, что в качестве жидкости для распыления используют прозрачные жидкости.
4. Система по п.1, отличающаяся тем, что в качестве жидкости для распыления используют непрозрачные жидкости.
5. Система по п.1, отличающаяся тем, что в качестве жидкости для распыления используют суспензию.
6. Система по п.1, отличающаяся тем, что в качестве источника некогерентного света для освещения области движения частиц используют диодный источник некогерентного света.
7. Система по п.1, 6, отличающаяся тем, что в качестве источника некогерентного света для освещения области движения частиц используют диодный лазер.
8. Система по п.1, отличающаяся тем, что в качестве преобразователя сигналов рассеяния света в сигналы напряжения используют преобразователь, позволяющий получить сигнал напряжения, состоящий из 32 кадров измерений с индивидуальной длительностью 20 мс с дискретизацией 312,5 Мвыб/с.
9. Система по пп.1, 8, отличающаяся тем, что каждый кадр сигнала напряжения содержит ансамбль 1000 ± 150 отдельных сигналов рассеяния света.
10. Система по пп.1, 8, отличающаяся тем, что в качестве преобразователя сигналов рассеяния света в сигналы напряжения используют трансимпедансный усилитель.
11. Система по п.1, отличающаяся тем, что вычислительное устройство, преобразователь и детектор связаны с использованием технологии проводной передачи данных.
12. Система по п.1, отличающаяся тем, что вычислительное устройство, преобразователь и детектор связаны с использованием технологии беспроводной передачи данных.
13. Система по п.1, отличающаяся тем, что реализуемый вычислительным устройством классификатор на основе обученной свёрточной нейронной сети состоит из блоков, каждый из которых включает:
- свёрточный слой, содержащий произвольно необходимое количество и размер пространственных фильтров и соответствующих им карт признаков,
- слой пакетной нормализации,
- нелинейную сигмоидную функцию активации ReLu.
14. Система по п.13, отличающаяся тем, что за каждым блоком реализуемого вычислительным устройством классификатора на основе обученной свёрточной нейронной сети, кроме терминального блока, следует субдискретизирующий слой, а за терминальным блоком следуют исключающий слой, выравнивающий слой и заключительный полносвязный слой с выходом, обработанным нелинейной сигмовидной функцией активации.
15. Способ измерения размеров и скоростей частиц на основе скоростной регистрации формы сигнала обратного рассеяния светового пучка известного профиля и обработки методом машинного обучения по калибровочным данным, характеризующийся тем, что способ включает следующие этапы:
- распыление жидкости распылителем с получением цепочки частиц, близкой к сферической форме,
- освещение области движения частиц одним сфокусированным гауссовым пучком эллиптической формы, формируемым источником некогерентного света;
- регистрация света, рассеянного частицами, прошедшими через гауссов пучок эллиптической формы, одним детектором;
- преобразование сигналов рассеяния света в сигналы напряжения преобразователем;
- передача сигналов напряжения, каждый кадр которых содержит ансамбль отдельных сигналов рассеяния света, на вычислительное устройство, реализующее классификатор на основе обученной свёрточной нейронной сети;
- вычисление размеров и скоростей частиц.
16. Способ по п.15, отличающийся тем, что распыление жидкости в цепочку частиц, близкую к сферической форме, осуществляют генератором монодисперсных капель.
17. Способ по п.15, отличающийся тем, что распыляют прозрачную жидкость.
18. Способ по п.15, отличающийся тем, что распыляют непрозрачную жидкость.
19. Способ по п.15, отличающийся тем, что распыляют суспензию.
20. Способ по п.15, отличающийся тем, что освещение области движения частиц осуществляют диодным источником некогерентного света.
21. Способ по пп.15, 20, отличающийся тем, что освещение области движения частиц осуществляют диодным лазером.
22. Способ по п.15, отличающийся тем, что зарегистрированные детектором сигналы рассеяния света преобразуют в сигналы напряжения трансимпедансным усилителем.
23. Способ по п.15, отличающийся тем, что сигналы рассеяния света, сигналы напряжения передают посредством технологии проводной передачи данных.
24. Способ по п.15, отличающийся тем, что сигналы рассеяния света, сигналы напряжения передают посредством технологии беспроводной передачи данных.
25. Способ по п.15, отличающийся тем, что на вычислительное устройство передают сигналы напряжения, каждый из которых состоит из 32 кадров измерений с индивидуальной длительностью 20 мс с дискретизацией 312,5 Мвыб/с.
26. Способ по пп.15, 25, отличающийся тем, что на вычислительное устройство передают сигналы напряжения, каждый кадр которых содержит ансамбль 1000 ± 150 отдельных сигналов рассеяния света.
27. Способ по п.15, отличающийся тем, что вычисление размеров и скоростей частиц осуществляют с помощью вычислительного устройства, реализующего классификатор на основе обученной свёрточной нейронной сети, состоящий из блоков, каждый из которых включает:
- свёрточный слой, содержащий произвольно необходимое количество и размер пространственных фильтров и соответствующих им карт признаков;
- слой пакетной нормализации;
- нелинейную сигмоидную функцию активации ReLu.
28. Способ по пп.15, 27, отличающийся тем, что вычисление размеров и скоростей частиц осуществляют с помощью вычислительного устройства, реализующего классификатор на основе обученной свёрточной нейронной сети, состоящий из блоков, за каждым из которых, кроме терминального блока, следует субдискретизирующий слой, а за терминальным блоком следуют исключающий слой, выравнивающий слой и заключительный полносвязный слой с выходом, обработанным нелинейной сигмовидной функцией активации.
| DE 102014211514 B4, 12.10.2017 | |||
| WO 2013139691 A3, 26.09.2013 | |||
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ВЗВЕШЕННЫХ ЧАСТИЦ В ПОТОКЕ | 2022 |
|
RU2810026C1 |
| Способ регистрации сигналов люминесценции и рассеяния от аэрозольных частиц при их возбуждении в струе и система для его осуществления | 2022 |
|
RU2801546C1 |
| УСТРОЙСТВО АНАЛИЗА ВЗВЕШЕННЫХ ЧАСТИЦ | 2021 |
|
RU2767953C1 |
| ЛАМПОВЫЙ ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СОСТАВА АЭРОЗОЛЕЙ НА ОСНОВЕ ЛЮМИНЕСЦЕНТНОГО АНАЛИЗА ИНДИВИДУАЛЬНЫХ ЧАСТИЦ | 2004 |
|
RU2279663C2 |

