Группа изобретений относится к области медицины, а именно к оперативной урологии [A61B 18/00, A61B 18/26, A61B 34/30].
Из уровня техники известна СИСТЕМА УПРАВЛЕНИЯ МЕДИЦИНСКИМИ ИНСТРУМЕНТАМИ [JP2023530519A, опубл. 18.07.2023]. Медицинская система включает в себя следующие компоненты: инструмент, осуществляющий доступ к анатомической области через первый путь доступа, и второй инструмент, обладающий компонентом визуализации, предоставляющим данные изображения, отображающие анатомическую область, причём второй инструмент может получать доступ к анатомической области через второй путь доступа. Также имеется один или несколько машиночитаемых носителей, на которых хранятся исполняемые инструкции, включающие следующее: при выполнении схемой управления, они позволяют идентифицировать различия между первой системой координат, связанной с первым инструментом, и второй системой координат, связанной со вторым инструментом, и обновляют опорную систему координат управления, связанную с первым инструментом, на основе указанных различий или частично на их основе.
Недостатком аналога является низкая точность устройства, высокий риск послеоперационных осложнений и миграции камня при удалении, высокая вероятность травмировать мочевыводящие пути. Так же недостатком аналога является слабый контроль над движениями, а так же влияние тремора на ход проведения операции. Кроме того, оперирующий хирург подвергается высокой ментальной и физической нагрузке, ввиду длительной операции, что может отразиться на качестве проведённой операции и привести к послеоперационным осложнениям и риску рецидива.
Из уровня техники известно УСТРОЙСТВО ИДЕНТИФИКАЦИИ АНАТОМИЧЕСКИХ ОСОБЕННОСТЕЙ И НАЦЕЛИВАНИЕ НА НИХ [JP2023508521A, опубл. 02.03.2023]. Медицинская система включает в себя следующие компоненты: эндоскоп с камерой, причём его дистальный конец оборудован электромагнитным датчиком положения; роботизированная медицинская подсистема, оснащённая несколькими шарнирными рычагами; схема управления, связанная с эндоскопом и роботизированной медицинской подсистемой для перемещения эндоскопа к области лечения на пациенте в соответствии с пользовательскими вводимыми данными и для управления движением эндоскопа в электромагнитном поле с целью фиксации положения его дистального конца.
Система также генерирует данные пользовательского интерфейса, указывающие требуемое анатомическое местоположение в качестве цели. Она получает первое изображение от камеры эндоскопа и использует его для определения целевого анатомического признака. Затем, на основе местоположения идентифицированного целевого анатомического признака на первом изображении, система управления регулирует положение пациента в соответствии с требованиями.
Недостатком аналога является низкая точность устройства, высокий риск послеоперационных осложнений и миграции камня при удалении, высокая вероятность травмировать мочевыводящие пути. Так же недостатком аналога является слабый контроль над движениями, а так же влияние тремора на ход проведения операции. Кроме того, оперирующий хирург подвергается высокой ментальной и физической нагрузке, ввиду длительной операции, что может отразиться на качестве проведённой операции и привести к послеоперационным осложнениям и риску рецидива.
Наиболее близким по технической сущности является ХИРУРГИЧЕСКИЙ РОБОТ-ПЕРКУТАННЫЙ НЕФРОСКОП ДЛЯ ИСКУССТВЕННОЙ ПУНКЦИИ [CN216908111U, опубл. 08.07.2022]. Хирургический робот для чрескожного нефроскопа с искусственной пункцией оснащён следующими компонентами: система включает оборудование для взаимодействия человека с компьютером, оборудование управления, механическую руку, концевой эффектор, эндоскопическое оборудование, мишень, расширительную трубку, лазерное оборудование и трёхмерную камеру; лазерное устройство содержит лазерное волокно.
Оборудование управления выполнено с возможностью соединения с оборудованием взаимодействия человека с компьютером, механической рукой, эндоскопическим оборудованием и трёхмерной камерой. Оборудование взаимодействия человека с компьютером выполнено с возможностью управления положением и положением механической руки, и врач может работать с помощью оборудования взаимодействия человека с компьютером. Концевой эффектор выполнен с возможностью зажима эндоскопического аппарата и лазерного волокна, концевой эффектор установлен на манипуляторе робота, а также положение и положение концевого эффектора управляются манипулятором робота.
Недостатком аналога является низкая точность устройства, высокий риск послеоперационных осложнений и миграции камня при удалении, высокая вероятность травмировать мочевыводящие пути. Так же недостатком аналога является слабый контроль над движениями, а так же влияние тремора на ход проведения операции. Кроме того, оперирующий хирург подвергается высокой ментальной и физической нагрузке, ввиду длительной операции, что может отразиться на качестве проведённой операции и привести к послеоперационным осложнениям и риску рецидива.
Задачей изобретения является устранение недостатков прототипа.
Технический результат группы изобретений заключается в высокой точности при дроблении камня. Кроме того, технический результат заключается в снижении риска повреждения мочевыводящих путей пациента. Кроме того, технический результат заключается в уменьшении вероятности миграции камня. Кроме того, технический результат заключается в более точном контроле за движениями. Кроме того, технический результат заключается в практически полном снижении тремора при проведении операции. Кроме того, технический результат заключается в снижении ментальной и физической нагрузки оперирующего хирурга. Кроме того, технический результат заключается в уменьшении длительности операции. Кроме того, технический результат заключается в снижении вероятности возникновения послеоперационных осложнений и риска рецидива.
Технический результат группы изобретений достигается за счёт того, что система для проведения робот-ассистированной операции нефролитотрипсии содержит роботизированного ассистента, представляющего собой, хирургический манипулятор, рукоять роботизированного ассистента, поворотный фиксатор нефроскопа, систему подачи физиологического раствора, имеющую патрубки, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента, на рукояти роботизированного ассистента в свою очередь установлен поворотный фиксатор, а внутрь поворотного фиксатора смонтирован нефроскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с нефроскопом патрубками подачи физиологической жидкости.
В частности, в качестве нефроскопа использовался полуригидный нефроскоп.
Кроме того, технический результат достигается за счёт того, что система для проведения робот-ассистированной операции уретеролитотрипсии содержит роботизированного ассистента, представляющего собой, хирургический манипулятор, рукоять роботизированного ассистента, поворотный фиксатор уретерореноскопа, систему подачи физиологического раствора, имеющую патрубки, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента, на рукояти роботизированного ассистента, в свою очередь, установлен поворотный фиксатор, а внутрь поворотного фиксатора смонтирован уретерореноскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с уретерореноскопом патрубками подачи физиологической жидкости.
В частности, в качестве уретерореноскопа использовался полуригидный уретерореноскоп.
Краткое описание чертежей.
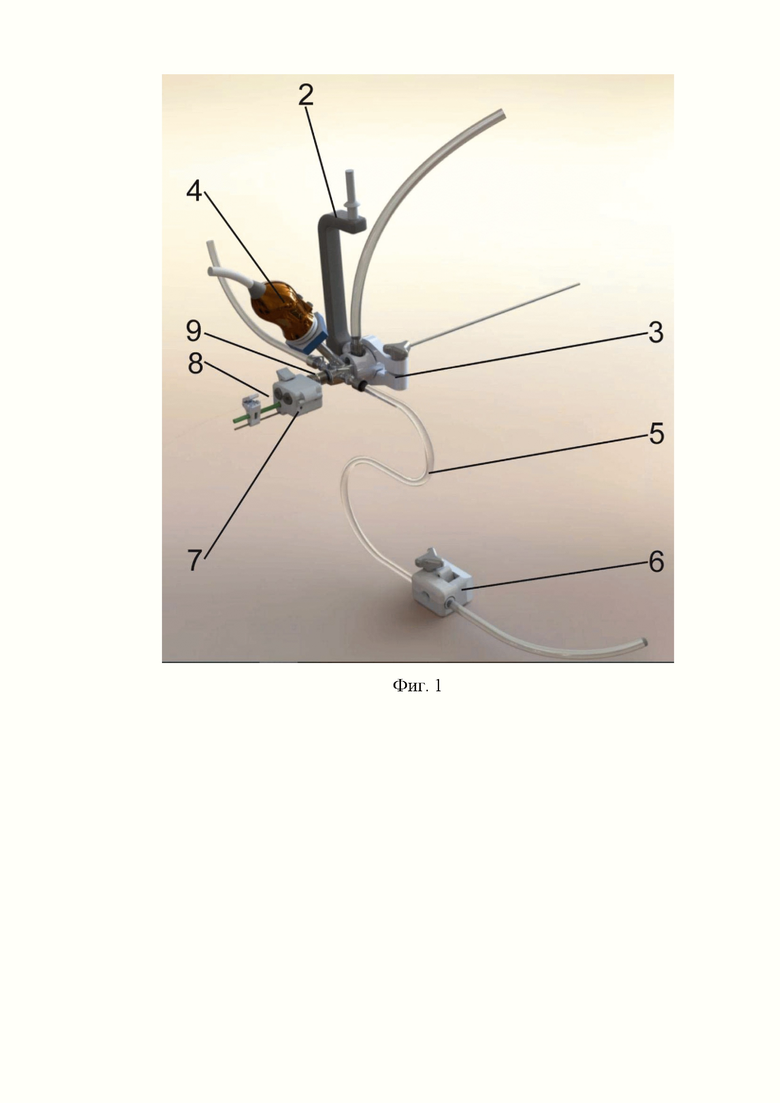
На фиг. 1 представлено устройство, содержащее нефроскоп, в общем виде.
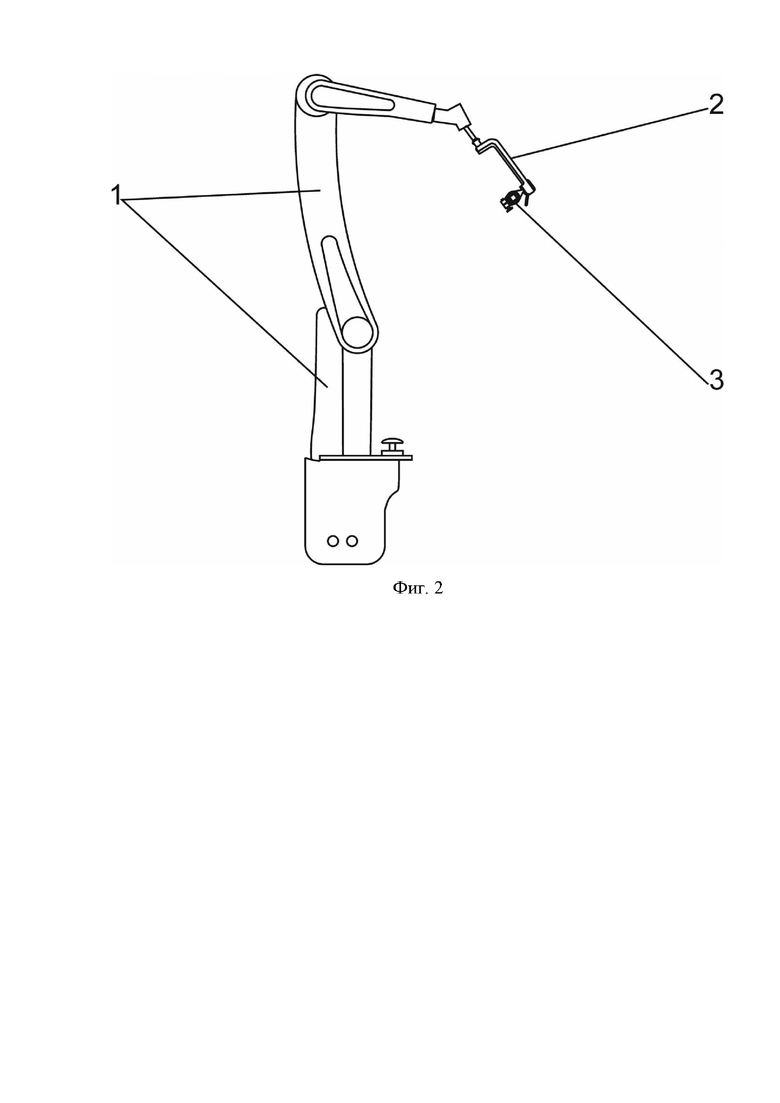
На фиг. 2 представлен роботизированный ассистент.
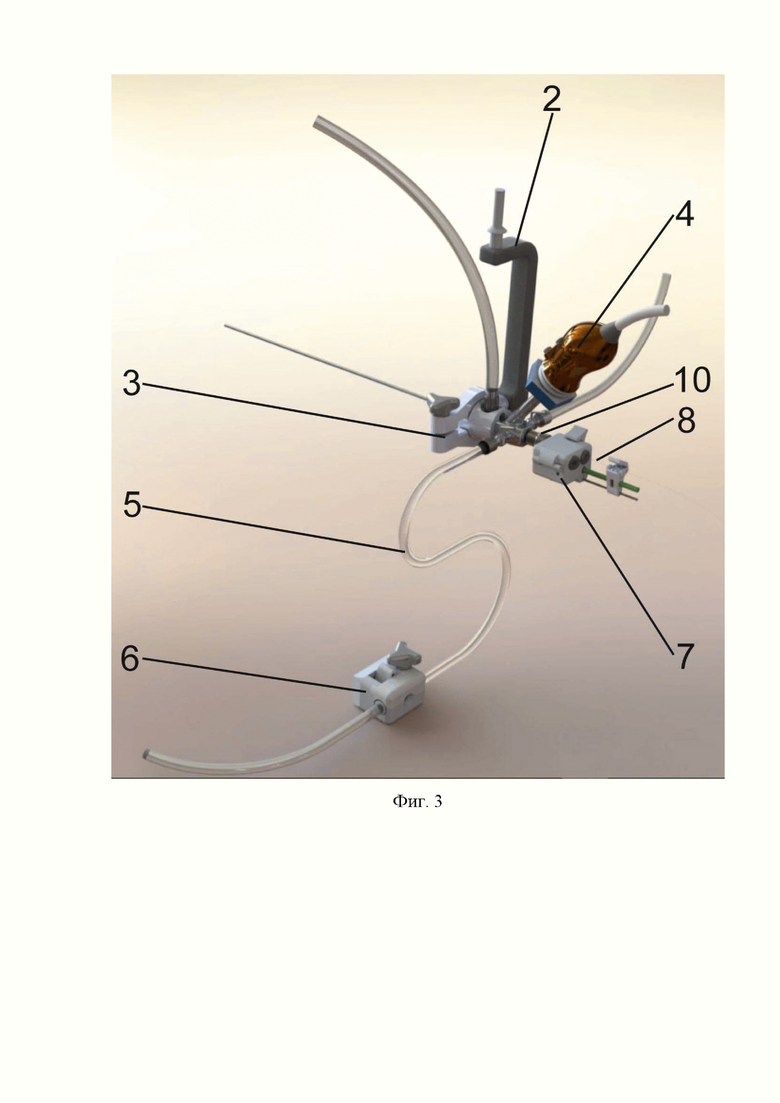
На фиг. 3 представлено устройство, содержащее уретерореноскоп, в общем виде.
На фигурах обозначено: 1 - роботизированный ассистент, 2 - рукоять роботизированного ассистента, 3 - поворотный фиксатор, 4 - оптический прибор, 5 - патрубок подачи физиологического раствора, 6 - система подачи физиологического раствора, 7 - система подачи лазерного волокна, 8 - лазерное волокно, 9 - нефроскоп, 10 - уретерореноскоп.
Настоящая группа изобретений реализуется посредством следующих технических средств.
Основой системы для робот-ассистированных методов дробления камней в мочевыделительных путях является роботизированный ассистент 1, к которому смонтирована рукоять роботизированного ассистента 2, выполненная с возможностью поворота. Рукоять роботизированного ассистента 2 содержит отверстие, при помощи которого к рукояти роботизированного ассистента 2 смонтирован поворотный фиксатор 3, выполненный с возможностью поворота относительно вертикальной оси на 360 градусов.
Роботизированный ассистент 1 выполнен с возможностью поворота вокруг своей оси на 360 градусов, а также наклона до 90 градусов, относительно места крепления.
Фиксатор 3 выполнен таким образом, что фиксирует как нефроскоп 9, так и уретерореноскоп 10. При этом и нефроскоп 9 и уретерореноскоп 10 содержат оптический прибор 4, выполненный с возможностью передачи изображения на экран, патрубок подачи физиологического раствора 5, соединённый с системой подачи физиологического раствора 6, систему подачи лазерного волокна 7, выполненную с возможностью подачи лазерного волокна 8.
Оптический прибор 4 содержит эндоскоп.
Данная система используется для проведения следующих операций:
1. Робот-ассистированная уретеролитотрипсия
2. Робот-ассистированная нефролитотрипсия
Робот-ассистированная уретеролитотрипсия реализуется следующим образом:
Роботизированного ассистента 1 фиксируют на краю операционного стола, на котором уже находится пациент, при этом пациент находится на спине с разведёнными ногами. После фиксации роботизированного ассистента 1 на краю операционного стола пациента вводят в состояние наркоза, затем происходит калибровка оси вращения.
Для проведения робот-ассистированной уретеролитотрипсии используют уретерореноскоп 10, в частности полуригидный уретерореноскоп, зафиксированный в поворотном фиксаторе 3.
Последующее управление системой происходит при помощи блока управления, в частности, джойстиком, при этом данная система управления позволяет выполнять уретерореноскопом 10 весь спектр необходимых движений. Управление производится непосредственно хирургом, выполняющим операцию.
Изначально уретерореноскоп 10 проводится через уретру в мочевой пузырь с последующим перемещением в устье мочеточника. После попадания полуригидного уретерореноскопа происходит перемещение уретерореноскопа 10 по мочеточнику по направлению расположения конкремента, находящемуся в мочевыводящих путях.
После фиксации факта обнаружения конкремента при помощи изображения, полученного через эндоскоп, используя систему подачи физиологического раствора 6 и патрубки подачи физиологического раствора 5, подают через уретерореноскоп 10 физиологический раствор, а при помощи системы подачи лазерного волокна 7 подают лазерное волокно 8 в уретерореноскоп 10 и фиксируют лазерное волокно 8 снаружи.
Используя джойстик, оперирующий хирург производит манипуляции системой, вследствие чего происходит дробление конкремента в пыль с последующим удалением данной пыли.
После факта фиксации удаления пыли, образовавшейся после полного разрушения конкремента, систему извлекают в обратном порядке.
Робот-ассистированная нефролитотрипсия реализуется следующим образом:
Роботизированного ассистента 1 фиксируют на краю операционного стола, на котором уже находится пациент, при этом пациент находится в положении на животе. После фиксации роботизированного ассистента 1 на краю операционного стола пациента вводят в состояние наркоза, затем происходит калибровка оси вращения.
Для проведения робот-ассистированной нефролитотрипсии используют нефроскоп 9, в частности полуригидный нефроскоп, зафиксированный в поворотном фиксаторе 3.
Последующее управление системой происходит при помощи блока управления, в частности, джойстиком, при этом данная система управления позволяет выполнять нефроскопом 9 весь спектр необходимых движений. Управление производится непосредственно хирургом, выполняющим операцию.
Изначально производится прокол в поясничной области, необходимый для доступа к полостной системе почки. После получения возможности доступа к полостной системе почки вводится нефроскоп 9. Нефроскоп 9 вводится в почку в направлении местоположения конкремента.
После фиксации факта обнаружения конкремента при помощи изображения, полученного через эндоскоп, используя систему подачи физиологического раствора 6 и патрубки подачи физиологического раствора 5, подают через нефроскоп 9 физиологический раствор, а при помощи системы подачи лазерного волокна 7 подают лазерное волокно 8 в нефроскоп 9 и фиксируют лазерное волокно 8 снаружи.
Используя джойстик, оперирующий хирург производит манипуляции системой, вследствие чего происходит дробление конкремента в пыль с последующим удалением данной пыли.
После факта фиксации удаления пыли, образовавшейся после полного разрушения конкремента, систему извлекают в обратном порядке.
Пример осуществления.
В качестве примера реализации группы изобретений с достижением технического результата было проведено две операции, а именно:
1. Робот-ассистированная трансуретральная контактная уретеролитотрипсия, литоэкстракция.
2. Робот-ассистированная микроперкутанная нефролитотрипсия с литоэкстракцией.
У пациента, которому была рекомендована операция «робот-ассистированная трансуретральная контактная уретеролитотрипсия, литоэкстракция», был обнаружен рентгеннегативный, неинфицированный, камень правого мочеточника, диаметром 6 мм.
Операция осуществлялась посредством следующих действий:
Роботизированного ассистента фиксируют на краю операционного стола, на котором уже находится пациент, при этом пациент находится на спине с разведёнными ногами. После фиксации роботизированного ассистента на краю операционного стола пациента вводят в состояние наркоза, затем происходит калибровка оси вращения, таким образом, чтобы уретерореноскоп был направлен в сторону отверстия уретры.
Под управлением оперирующего хирурга уретерореноскоп вводится в мочевой пузырь. После попадания в мочеточник систему перемещают по мочевыводящим путям до момента, пока не будет виден через эндоскоп камень.
После обнаружения камня, диаметром 6 мм активируют систему подачи физиологического раствора и через патрубок подачи физиологического раствора физиологический раствор направляют в уретерореноскоп, затем физиологический раствор направляют в место расположения камня, находящегося в мочевыводящих путях. В данном случае, в качестве физиологического раствора использовался раствор натрия хлорида, состоящий из 0,9% раствора хлорида натрия в дистиллированной воде и является безопасным для использования внутри тела пациента.
После введения физиологического раствора вводят лазерное волокно через систему подачи лазерного волокна. Лазерное волокно направляют в уретерореноскоп, затем лазерное волокно направляют в место расположения камня, находящегося в мочевыводящих путях. Путём управления оперирующим хирургом, через блок управления, происходит воздействие на камень, находящийся в мочевыводящих путях, при помощи лазерного волокна, вследствие чего камень разрушается до состояния пыли с последующим удалением.
После фиксации факта разрушения камня и удаления пыли, образованной после разрушения камня, систему извлекают в обратном порядке.
У пациента, которому была рекомендована операция «робот-ассистированная микроперкутанная нефролитотрипсия с литоэкстракцией», был обнаружен рентгенпозитивный, инфицированный, коралловидный конкремент лоханки правой почки объёмом 16.7 см. куб., плотностью 622 едН.
Операция осуществлялась посредством следующих действий:
Роботизированного ассистента фиксируют на краю операционного стола, на котором уже находится пациент, при этом пациент находится в положении на спине. После фиксации роботизированного ассистента на краю операционного стола пациента вводят в состояние наркоза, затем происходит калибровка оси вращения, таким образом, чтобы нефроскоп был направлен в сторону почки.
Оперирующий хирург делает прокол и расширение канала бужами, с последующей с установкой специаьного тубуса, обеспечивающего возможность ввода нефроскопа для доступа к почке.
Под управлением оперирующего хирурга нефроскоп вводится в почку для дальнейшего продвижения к месту расположения камня.
После обнаружения камня, объёмом 16,7 см. куб. активируют систему подачи физиологического раствора и через патрубок подачи физиологический раствор направляют в нефроскоп, затем физиологический раствор направляют в место расположения камня. В данном случае, использовался раствор натрия хлорида, состоящий из 0,9% раствора хлорида натрия в дистиллированной воде, который является безопасным для использования внутри тела пациента.
После введения физиологического раствора вводят лазерное волокно через систему подачи лазерного волокна. Лазерное волокно направляют в нефроскоп, затем лазерное волокно направляют в место расположения камня, находящегося в мочевыводящих путях. Путём управления оперирующим хирургом через блок управления происходит воздействие на камень, находящийся в мочевыводящих путях, через лазерное волокно, вследствие чего камень разрушается до состояния пыли с последующим удалением.
После фиксации факта разрушения камня и удаления пыли, образованной после разрушения камня, систему извлекают в обратном порядке.
Проведение операций с пациентами показали, что система для робот-ассистированных методов дробления камней в мочевыделительных путях во время проведения операции «робот-ассистированная трансуретральная контактная уретеролитотрипсия, литоэкстракция» и операции «робот-ассистированная микроперкутанная нефролитотрипсия с литоэкстракцией» полностью разрушила камни, а именно рентгеннегативный, неинфицированный, камень правого мочеточника, диаметром 6 мм и рентгенпозитивный, инфицированный, коралловидный конкремент лоханки правой почки объёмом 16.7 см. куб., плотностью 622 Нu, в пыль с последующим удалением данной пыли. А также во время операции происходил анализ состояния мочевыводящих путей на предмет обнаружения повреждений, вследствие проведения данного анализа повреждений не зафиксировано. Аналогичное исследование проводилось и в послеоперационный период, вследствие послеоперационного исследования повреждения мочевыводящих путей не зафиксировано.
Таким образом, за счёт того, что система для проведения робот-ассистированной операции нефролитотрипсии содержит роботизированного ассистента, представляющего собой, хирургический манипулятор, рукоять роботизированного ассистента, поворотный фиксатор нефроскопа, систему подачи физиологического раствора, имеющую патрубки, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента, на рукояти роботизированного ассистента в свою очередь установлен поворотный фиксатор, а внутрь поворотного фиксатора смонтирован нефроскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с нефроскопом патрубками подачи физиологической жидкости, а так же за счёт того, что система для проведения робот-ассистированной операции уретеролитотрипсии содержит роботизированного ассистента, представляющего собой, хирургический манипулятор, рукоять роботизированного ассистента, поворотный фиксатор уретерореноскопа, систему подачи физиологического раствора, имеющую патрубки, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента, на рукояти роботизированного ассистента, в свою очередь, установлен поворотный фиксатор, а внутрь поворотного фиксатора смонтирован уретерореноскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с уретерореноскопом патрубками подачи физиологической жидкости обеспечивается такой технический результат как высокая точность при дроблении камня. Кроме того, обеспечивается такой технический результат, как снижение риска повреждения мочевыводящих путей пациента. Кроме того, обеспечивается такой технический результат, как уменьшение вероятности миграции камня. Кроме того, обеспечивается такой технический результат, как более точный контроль за движениями. Кроме того, обеспечивается такой технический результат, как практически полное снижение тремора при проведении операции. Кроме того, обеспечивается такой технический результат, как снижение ментальной и физической нагрузки оперирующего хирурга. Кроме того, обеспечивается такой технический результат, как уменьшение длительности операции. Кроме того, обеспечивается такой технический результат, как снижение вероятности возникновения послеоперационных осложнений и риска рецидива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выполнения робот-ассистированной трансуретральной уретеропиелолитотрипсии | 2022 |
|
RU2801530C1 |
| СПОСОБ ЧЕРЕЗКОЖНОГО ПУНКЦИОННОГО ДОСТУПА В ПОЛОСТНУЮ СИСТЕМУ ПОЧКИ ПРИ ЛЕЧЕНИИ КОРАЛЛОВИДНОГО НЕФРОЛИТИАЗА | 2015 |
|
RU2630134C2 |
| Способ лечения мочекаменной болезни путем перекутанной нефролитотрипсии | 2016 |
|
RU2633594C1 |
| Способ чрескожной нефролитотрипсии без применения рентгеновского излучения | 2024 |
|
RU2832584C1 |
| СПОСОБ ЗАЩИТЫ СЛИЗИСТОЙ ОБОЛОЧКИ ЛОХАНКИ И ЧАШЕЧЕК ПОЧКИ В ПРОЦЕССЕ ЛАЗЕРНОЙ ТРАНСУРЕТРАЛЬНОЙ НЕФРОЛИТОТРИПСИИ | 2016 |
|
RU2630584C1 |
| СПОСОБ ЛАПАРОСКОПИЧЕСКОЙ НЕФРОСКОПИИ У СОБАК И КОШЕК | 2017 |
|
RU2668477C1 |
| СПОСОБ ВАКУУМНОЙ АСПИРАЦИИ ПРИ ТРАНСУРЕТРАЛЬНОЙ НЕФРОЛИТОТРИПСИИ | 2014 |
|
RU2549666C1 |
| Способ чрескожного пункционного доступа в полостную систему почки при перкутанной нефролитолапаксии | 2021 |
|
RU2755226C1 |
| Способ выбора тактики лечения при проведении лазерной контактной уретеролитотрипсии камней верхней трети мочеточника | 2019 |
|
RU2725961C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО МАЛОИНВАЗИВНОГО ЛЕЧЕНИЯ НЕФРОЛИТИАЗА У ВЗРОСЛЫХ | 2018 |
|
RU2689853C2 |
Заявленная группа изобретений относится к медицинской технике, а именно к системам для проведения робот-ассистированных операций удаления камней в мочевыделительной системе. Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе содержит роботизированный ассистент, выполненный в виде хирургического манипулятора, рукоять роботизированного ассистента, блок управления системой, джойстик, поворотный фиксатор нефроскопа, систему подачи физиологической жидкости, имеющую патрубки подачи физиологической жидкости, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента. На рукояти роботизированного ассистента установлен поворотный фиксатор. Внутрь поворотного фиксатора смонтирован нефроскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с нефроскопом патрубками подачи физиологической жидкости. Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе содержит роботизированный ассистент, выполненный в виде хирургического манипулятора, рукоять роботизированного ассистента, блок управления системой, джойстик, поворотный фиксатор уретерореноскопа, систему подачи физиологической жидкости, имеющую патрубки подачи физиологической жидкости, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента. На рукояти роботизированного ассистента установлен поворотный фиксатор. Внутрь поворотного фиксатора смонтирован уретерореноскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с уретерореноскопом патрубками подачи физиологической жидкости. Техническим результатом является высокая точность при дроблении камня, снижение риска повреждения мочевыводящих путей пациента, уменьшение вероятности миграции камня, более точный контроль за движениями, практически полное снижение тремора при проведении операции, снижение ментальной и физической нагрузки оперирующего хирурга, уменьшение длительности операции, снижение вероятности возникновения послеоперационных осложнений и риска рецидива. 2 н.п. ф-лы, 3 ил.
1. Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе, содержащая роботизированный ассистент, выполненный в виде хирургического манипулятора, рукоять роботизированного ассистента, блок управления системой, джойстик, поворотный фиксатор нефроскопа, систему подачи физиологической жидкости, имеющую патрубки подачи физиологической жидкости, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента, на рукояти роботизированного ассистента установлен поворотный фиксатор, а внутрь поворотного фиксатора смонтирован нефроскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с нефроскопом патрубками подачи физиологической жидкости.
2. Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе, содержащая роботизированный ассистент, выполненный в виде хирургического манипулятора, рукоять роботизированного ассистента, блок управления системой, джойстик, поворотный фиксатор уретерореноскопа, систему подачи физиологической жидкости, имеющую патрубки подачи физиологической жидкости, и систему подачи лазерного волокна, в которой на подвижной части роботизированного ассистента закреплена рукоять роботизированного ассистента, на рукояти роботизированного ассистента установлен поворотный фиксатор, а внутрь поворотного фиксатора смонтирован уретерореноскоп, содержащий в задней части систему подачи лазерного волокна, оптический прибор, содержащий эндоскоп, и систему подачи физиологической жидкости, соединённую с уретерореноскопом патрубками подачи физиологической жидкости.
| US 20210330309 A1, 28.10.2021 | |||
| WO 2022106990 A1, 27.05.2022 | |||
| CN 114098588 A, 01.03.2022 | |||
| US 11382650 B2, 12.07.2022 | |||
| US 20220280021 A1, 08.09.2022 | |||
| US 20190175799 A1, 13.06.2019. |

