Изобретение относится к медицине, а именно к урологии, и может быть применимо для выполнения оперативного лечения пациентов с камнями в мочевыводящих путях с использованием роботизированного ассистента.
Известен способ удаления камней из мочеточника, включающий цистоскопию, введение в просвет мочеточника уретероскопа к камню, проведение по каналу уретерореноскопа лазерного волокна для дробления. Производят литотрипсию, мелкие оставшиеся фрагменты извлекают. При этом для расширения просвета мочеточника и лучшей визуализации конкремента через канал эндоскопа нагнетается жидкость (Б.К. Комяков, Б.Г. Гулиев, С.В. Попов. Эндоскопическое лечение больных с камнями мочеточников. "Эндоскопическая хирургия". 2004, №4, с. 50). Все стандартные существующие методы эндоскопического лечения камней мочевыводящих путей подразумевают, что оперирующий хирург держит уретерореноскоп в руке, управляя им.
Известен способ выполнения робот-ассистированной нефролитотрипсии с использованием гибкого уретерореноскопа. Уретерореноскоп закреплен на подвижной установке, выполняющей поступательные и вращательные движения для перемещения инструмента. Управляется хирургом опосредованно при помощи консоли с джойстиками.
Недостатками этого способа является применимость только для гибкого уретерореноскопа: ограничивает область применения только для небольших камней, локализованных в чашках почки, значительно удорожает операцию за счет использования гибкого уретерореноскопа, необходимость в предварительном расширении мочеточника («престентинг») для установки рабочего кожуха.
Задачей изобретения является модернизация трансуретральной уретеропиелолитотрипсии с использованием полу ригидного уретерореноскопа, что ускорит время проведения операции и уменьшит риск развития ранних и поздних послеоперационных осложнений, а также улучшит условия работы хирурга и предоставит возможность выполнять операцию удаленно.
Поставленная задача решается тем, что способ, включающий оперативное лечение пациента с камнями в мочевыводящих путях с использованием роботизированного ассистента, отличающийся тем, что инструмент фиксируется в роботическом модуле и управляется оперирующим хирургом с использованием джойстика дистанционно. При перемещении рукоятки управляющего джойстика вверх-вниз-влево-вправо происходит аналогичное движение кончика уретерореноскопа. Дополнительные две кнопки осуществляют приближение и отделение. Это обеспечивает сокращение времени проведения операции и уменьшение риска развития ранних и поздних послеоперационных осложнений.
Общие с прототипом признаки:
- оперативное лечение пациента с камнями в мочевыводящих путях.
Отличительные признаки:
- инструмент фиксируется в роботическом модуле,
- управляется оперирующим хирургом с использованием джойстика дистанционно.
Описание изобретения.
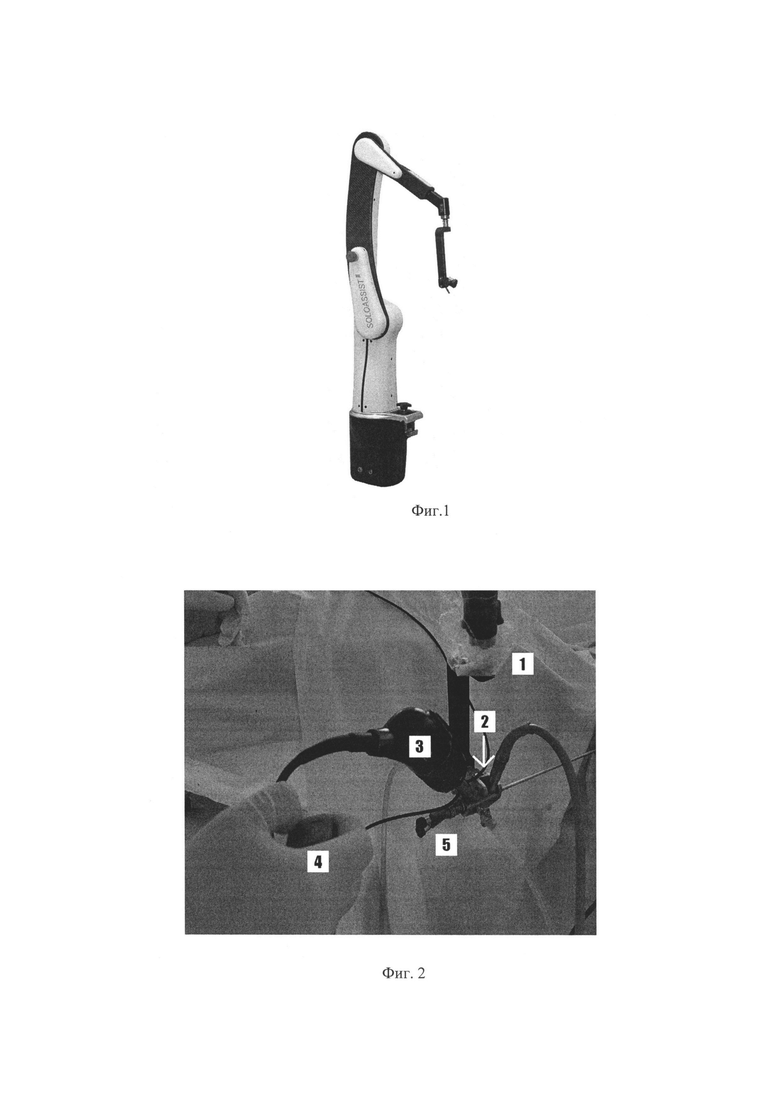
На фиг. 1 представлен внешний вид устройства - роботизированный ассистент AKTORmed SoloAssist II
На фиг. 2 представлен уретерореноскоп, зафиксированный в роботизированном ассистенте AKTORmed SoloAssist II
1 - рукоять роботизированного ассистента AKTORmed SoloAssist II; 2 - фиксатор инструмента; 3 - эндоскопическая камера; 4 - джойстик для управления роботизированным ассистентом; 5 - уретерореноскоп.
Способ реализуется следующим образом.
Роботизированный ассистент AKTORmed SoloAssist II устанавливается и закрепляется на краю операционного стола. Пациент находится в стандартном литотомическом положении: на спине с разведенными ногами. После введения пациента в наркоз, производится калибровка оси вращения для роботического модуля (наружное отверстие уретры у женщин, у мужчин- точка, перехода верхних волокон подвесной связки на корень полового члена). Используется полуригидный уретерореноскоп, который фиксируется в роботическом модуле. Оперирующий хирург управляет роботическим модулем с использованием комплектного джойстика, позволяющего выполнять уретерореноскопом весь спектр необходимых движений. Уретерореноскоп проводится через уретру в мочевой пузырь, затем в устье мочеточника. Далее по мочеточнику, к камню, находящемуся в мочевыводящих путях. Через уретерореноскоп подается физиологический раствор. Через канал проводится лазерное волокно, фиксируется снаружи. С использованием тонких движений роботического модуля производится дробление камня лазерной энергией в пыль. После окончания дробления уретерореноскоп извлекается в обратном порядке.
Способ содержит:
- общий с прототипом метод воздействия на камень энергией с целью его разрушения.
- отличается фиксацией и выполнением доступа и фрагментации камня использованием роботического модуля, управляемого дистанционно.
Данное решение считалось невыполнимым, из-за отсутствия роботических модулей, имеющих достаточную гибкость и управляемость, для выполнения точных действий. С каждым годом роботизированные системы в медицине, и хирургии, в частности, становятся все более актуальными. Однако первое поколение автоматизированных ассистентов - «PROBOT» (Англия), AESOP (США) и другие - были сравнительно тяжелыми, громоздкими и не позволяли изменять положение операционного стола во время операции. Их монтаж и демонтаж занимали значительное время, что, вопреки ожиданиям, только увеличивало рабочую нагрузку на врачей.
Последние разработки учли эти недостатки, и сегодня большинство хирургов предпочитают роботов человеку. На это есть несколько причин: отсутствует человеческий фактор (усталость, снижением внимания, тремор рук), более стабильное изображение, контроль перемещения инструмента, сокращение времени проведения операции.
Преимуществами данного метода являются:
- Высокая точность при дроблении камня, снижение риска повреждения мочевыводящих путей пациента.
- Уменьшение вероятности миграция камня.
- Более точный контроль за движениями.
- Полное исключение тремора.
- Снижение ментальной и физической нагрузки хирурга.
- Уменьшение длительности операции.
Все эти преимущества приводят к уменьшению числа послеоперационных осложнений, риска рецидива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе (варианты) | 2023 |
|
RU2831301C1 |
| Способ выбора тактики лечения при проведении лазерной контактной уретеролитотрипсии камней верхней трети мочеточника | 2019 |
|
RU2725961C1 |
| СПОСОБ ОРГАНОСОХРАНЯЮЩЕЙ РОБОТ-АССИСТИРОВАННОЙ ИНТРАКОРПОРАЛЬНОЙ РЕЗЕКЦИИ ПОЧКИ С ПРИМЕНЕНИЕМ ИЗОЛИРОВАННОЙ ФАРМАКО-ХОЛОДОВОЙ ИШЕМИИ КАРДИОПЛЕГИЧЕСКИМ РАСТВОРОМ | 2023 |
|
RU2812295C1 |
| Способ эндоскопического лечения больных нефролитиазом с применением альфа-адреноблокаторов | 2021 |
|
RU2779496C1 |
| СПОСОБ ЗАЩИТЫ СЛИЗИСТОЙ ОБОЛОЧКИ ЛОХАНКИ И ЧАШЕЧЕК ПОЧКИ В ПРОЦЕССЕ ЛАЗЕРНОЙ ТРАНСУРЕТРАЛЬНОЙ НЕФРОЛИТОТРИПСИИ | 2016 |
|
RU2630584C1 |
| Способ ирригации при эндоскопических вмешательствах, основанный на непрерывной системе с использованием манжеты регулируемого давления | 2023 |
|
RU2819735C1 |
| СПОСОБ ТРАНСВЕЗИКАЛЬНОЙ РОБОТ-АССИСТИРОВАННОЙ АДЕНОМЭКТОМИИ | 2022 |
|
RU2781739C1 |
| СПОСОБ ВАКУУМНОЙ АСПИРАЦИИ ПРИ ТРАНСУРЕТРАЛЬНОЙ НЕФРОЛИТОТРИПСИИ | 2014 |
|
RU2549666C1 |
| Способ проведения фасции- и нервосберегающей робот-ассистированной радикальной простатэктомии | 2018 |
|
RU2694219C1 |
| Способ проведения редуцированной фасцио- и нервосберегающей робот-ассистированной радикальной простатэктомии | 2020 |
|
RU2745711C1 |
Изобретение относится к медицине, а именно к оперативной урологии. Полуригидный уретерореноскоп фиксируют в роботическом модуле, после чего оперирующий хирург с использованием джойстика управляет им дистанционно. При этом уретерореноскоп проводят через уретру в мочевой пузырь, затем в устье мочеточника, далее по мочеточнику к камню, находящемуся в мочевыводящих путях. Через уретерореноскоп подают физиологический раствор, через канал проводят лазерное волокно, фиксируют его. Далее производят дробление камня лазерной энергией, после окончания дробления уретерореноскоп извлекают в обратном порядке. Способ обеспечивает сокращение времени проведения операции и уменьшение риска развития ранних и поздних послеоперационных осложнений. 2 ил.
Способ выполнения робот-ассистированной трансуретральной уретеропиелолитотрипсии, включающий оперативное лечение пациента с камнями в мочевыводящих путях с использованием роботизированного ассистента, отличающийся тем, что полуригидный уретерореноскоп фиксируют в роботическом модуле, после чего оперирующий хирург с использованием джойстика управляет им дистанционно, при этом уретерореноскоп проводят через уретру в мочевой пузырь, затем в устье мочеточника, далее по мочеточнику к камню, находящемуся в мочевыводящих путях, через уретерореноскоп подают физиологический раствор, через канал проводят лазерное волокно, фиксируют его, далее производят дробление камня лазерной энергией, после окончания дробления уретерореноскоп извлекают в обратном порядке
| PHILIPPE F | |||
| Müller et al | |||
| Robotic stone surgery - Current state and future prospects: A systematic review | |||
| Arab J Urol | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Клапан | 1919 |
|
SU357A1 |
| Способ проведения фасции- и нервосберегающей робот-ассистированной радикальной простатэктомии | 2018 |
|
RU2694219C1 |
| Роботизированная система для удержания и перемещения хирургического инструмента при проведении лапароскопических операций | 2020 |
|
RU2753118C2 |
| АРЗУМАНЯН Э | |||
| Г | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
