Перекрестная ссылка на родственные заявки
[1] Настоящая заявка притязает на приоритет предварительной заявки на патент США с порядковым № 63/065448, озаглавленной «SYSTEMS, DEVICES AND METHODS FOR FAST BEAM POSITION MONITORING» и поданной 13 августа 2020 года, предварительной заявки на патент США с порядковым № 63/065442, озаглавленной «SYSTEMS, DEVICES AND METHODS FOR GAS PUFF BEAM IMAGING» и поданной 13 августа 2020 года, предварительной заявки на патент США с порядковым № 62/894290, озаглавленной «SYSTEMS, DEVICES AND METHODS FOR FAST BEAM POSITION MONITORING» и поданной 30 августа 2019 года, предварительной заявки на патент США с порядковым № 62/894220, озаглавленной «SYSTEMS, DEVICES AND METHODS FOR GAS PUFF BEAM IMAGING» и поданной 30 августа 2019 года, все из которых включены в данный документ по ссылке.
Область изобретения
[2] Предмет изобретения, описанный в данном документе, в целом относится к пучковым системам и, в частности, к пучковой диагностике на линии движения пучка заряженных частиц пучковой системы и, дополнительно, в частности, к системам и способам для облегчения быстрого мониторинга положения пучка для обнаружения неточного совмещения пучка в линии движения пучка. Предмет изобретения дополнительно относится к системам и способам облегчения неинвазивной пучковой диагностики.
Предпосылки изобретения
[3] Бор-нейтронозахватная терапия (БНЗТ) представляет собой модальность лечения множества типов рака, включающих в себя некоторые наиболее сложные типы. БНЗТ представляет собой технологию, которая избирательно нацелена на лечение опухолевых клеток при восстановлении жизнеспособности нормальных клеток с использованием соединения бора. Вещество, которое содержит бор, инжектируется в кровеносный сосуд, и бор собирается в опухолевых клетках. Пациент затем принимает лучевую терапию нейтронами (например, в форме пучка нейтронов). Нейтроны реагируют с бором, чтобы уничтожать опухолевые клетки при уменьшении или исключении вреда нормальным клеткам. Длительное клиническое исследование доказывает то, что пучок нейтронов с энергетическим спектром в пределах 3-30 килоэлектронвольт (кэВ) может быть предпочтительным для того, чтобы достигать более эффективного лечения рака при снижении радиационной нагрузки на пациента. Этот энергетический спектр или диапазон часто называется «эпитермальным».
[4] Наиболее традиционные способы генерации эпитермальных нейтронов (например, эпитермальных пучков нейтронов) основаны на ядерных реакциях протонов (например, пучка протонов) с бериллием или с литием (например, с бериллиевой мишенью или с литиевой мишенью).
[5] Для решений на основе электростатических ускорителей пучковая диагностика представляет собой неотъемлемую часть конструкции линии движения пучка заряженных частиц. Критическая задача в транспортировке пучка состоит в том, чтобы обеспечивать корректное расположение пучка внутри линии движения пучка (например, отсутствие прямого взаимодействия пучка с компонентами линии движения пучка и стенками). Любое влияние расположения или использования такой пучковой диагностики может быть пропорциональным энергии пучка по мере того, как разрушающая мощность пучка возрастает с энергией пучка. Это особенно верно для транспортировки пучков постоянного тока, при которой необратимое повреждение компонентов линии движения пучка может создаваться на миллисекундной временной шкале. Следовательно, непрерывный мониторинг положения пучка является ключом к успеху при транспортировке пучка в решениях на основе ускорителей.
[6] Традиционный монитор положения пучка (МПП) на основе матриц мониторов вторичной эмиссии демонстрирует надежную работу с миллиметровым разрешением. Тем не менее, традиционный МПП имеет относительно низкое пороговое значение приема мощности пучка вследствие прямого взаимодействия его зондов (тонкой фольги) с пучком. Соответственно, мониторинг пучка на основе матриц мониторов вторичной эмиссии не является предпочтительным для пучков вплоть до 3,5 мегаватт (МВт).
[7] Неразрушающие мониторы положения пучка (МПП) обычно основаны на обнаружении импеданса пучка. Такие неразрушающие МПП главным образом представляют собой емкостные МПП (например, линейные отсечные, кнопочные и полосковые МПП). Принцип работы таких устройств определения импеданса пучка приводит к ограничению их использования импульсными пучками.
[8] Традиционные системы, вероятно, 1) не имеют возможности успешно работать с пучками постоянного тока, 2) не имеют миллисекундного времени отклика, 3) не имеют возможности принимать пучки, имеющие мощность вплоть до 2,5 мегаэлектронвольт (МэВ) в расчете на ядро, 4) не обладают простотой и 5) не обладают надежностью.
[9] Для решений на основе ускорителей выходные результаты такой пучковой диагностики также включают в себя выдачу информации относительно параметров и характеристик пучка, которые экстенсивно используются для расположения и управления элементами линии движения пучка, формирования пучка, фокусировки пучка, отклонения пучка, очистки и вращения элементов линии движения пучка, мониторинга и статистики пучка и т.д. Традиционно, наиболее разработанной и используемой пучковой диагностикой является то, что можно назвать «инвазивной диагностикой», влияние которой на пучок (например, во время процесса измерения) обычно приводит к нежелательному возмущению одного или более параметров пучка.
[10] Традиционная инвазивная пучковая диагностика для измерения размера и профиля поперечного сечения пучка включает сканеры со щелевой решеткой и с эмиссией Эллисона, проводные профилировщики пучка и т.п. Однако такая инвазивная пучковая диагностика плохо подходит для мониторинга пучка в режиме реального времени, поскольку она a) возмущают пучок таким способом, который обычно приводит к нежелательному завершению пучка после небольшой длительности, и b) ограничена с точки зрения приемлемой мощности пучка вследствие прямого взаимодействия с частицами пучка.
[11] Использование традиционного пучкового проводного сканера ограничено собираемой зондом мощностью пучка. Следовательно, пучок постоянного тока может зондироваться только в области низкой энергии пучка (например, 30 килоэлектронвольт (кэВ) в относительно низкоэнергетической линии движения пучка при токе в 15 миллиампер (мА)). Чтобы преодолевать это ограничение, может быть использован импульсный пучок, который обеспечивает возможность использования проводного сканера с пучками более высокой энергии (определенными длительностью импульса пучка). Тем не менее, оба подхода (например, с или без импульсного пучка) не являются подходящими для непрерывного мониторинга параметров пучка (местоположения и размера) вследствие искажения пучка во время измерений.
[12] Важно отметить, что взаимодействие энергетических частиц пучка с зондом обычно сопровождается различными явлениями, некоторые из которых могут радикально усложнять интерпретацию сигналов. Например, явление вторичной электронной эмиссии (SEE) модифицирует ток, измеренный в зонде (сигнал). Стандартный подход SEE-подавления через смещение зонда не обеспечивает уменьшение доли SEE в сигнале для произвольной энергии частиц пучка. Кроме того, возможное формирование плазмы около поверхности зонда и быстрый нагрев зонда представляют собой процессы, также влияющие на сигнал. Доли этих явлений затруднительно прогнозировать и учитывать.
[13] Чтобы вести мониторинг пучков постоянного тока с высоким уровнем мощности (вплоть до 5 киловатт (кВт)) и обеспечивать базовые характеристики пучка, такие как положение, размер и профиль пучка, требуются фактически неинвазивные пучковые диагностики. Помимо этого, наличие таких неинвазивных пучковых диагностик может способствовать созданию контура обратной связи в режиме реального времени для систем управления пучком.
[14] По этим и другим причинам существует потребность в улучшенных, эффективных и компактных системах, устройствах и способах, которые ведут мониторинг положения пучка в пучковой системе, а также в улучшенных, эффективных и компактных системах, устройствах и способах, которые обеспечивают неинвазивные пучковые диагностики в нейтронно-пучковой системе.
Сущность изобретения
[15] В данном документе описываются примерные варианты осуществления систем, устройств и способов для пучковых систем, а более конкретно, систем и способов для облегчения быстрого мониторинга положения пучка для обнаружения неточного совмещения пучка в линии движения пучка. В определенных примерных вариантах осуществления монитор положения пучка (МПП) (например, также называемый в данном документе «быстрым монитором положения пучка», или «БМПП») предусмотрен для примерной пучковой системы, выполненной как нейтронно-пучковые системы (НПС).
[16] В определенных примерных вариантах осуществления монитор положения пучка (МПП) может включать в себя множество электродов, простирающихся во внутреннюю часть линии движения пучка пучковой системы. В этих вариантах осуществления монитор положения пучка (МПП) может работать посредством сбора гало-тока пучка электродами. Электроды могут быть гальванически изолированы от стенки МПП и смещаться относительно МПП-стенки, что позволяет уменьшать долю тока вторичной электронной эмиссии (SEE) в сигнал и может увеличивать гало-ток пучка, собираемый из сгенерированной пучком плазмы.
[17] Монитор положения пучка (МПП) может включать в себя уровень чувствительности обнаружения, связанный с уменьшением или исключением вызываемого пучком повреждения компонентов линии движения пучка при минимизации нарушения пучка, продвигающегося через линию движения пучка. Иными словами, минимальная величина тока пучка для пучка, проходящего через компонент линии движения пучка, может уменьшаться из-за электродов.
[18] Варианты осуществления систем, устройств и способов дополнительно относятся к пучковым системам на основе ускорителей, а более конкретно, к системам и способам для облегчения неинвазивных пучковых диагностик. В примерных вариантах осуществления неинвазивная пучковая диагностическая система включает в себя основанную на визуализации с помощью впрыска газа пучковую диагностическую систему (GPBI), подходящую для линии движения пучка, например, для линии движения пучка, которая служит частью нейтронно-пучковой системы (НПС). Основанная на визуализации с помощью впрыска газа пучковая диагностическая система (GPBI) может быть выполнена с возможностью доставлять информацию о положении и размере пучка в режиме реального времени без существенного возмущения пучка. Неинвазивная пучковая диагностическая система имеет временное разрешение и пространственное разрешение и работает в широких диапазонах различных мощностей пучка. Кроме того, настоящая основанная на визуализации с помощью впрыска газа пучковая диагностическая система (GPBI) является подходящей для высокоэнергетической линии движения пучка (ВЛДП) или в, или вблизи тандемного ускорителя в качестве части нейтронно-пучковой системы (НПС).
[19] Примерные варианты осуществления преодолевают вышеуказанные ограничения, связанные с традиционными инвазивными решениями для мониторинга пучка, за счет обеспечения неинвазивного непрерывного мониторинга пучка и получения критических параметров пучка (размера, местоположения, профиля) для системы управления пучком без ограничений на верхний предел мощности пучка. Помимо этого, как временное, так и пространственное разрешения настоящей диагностической GPBI-системы улучшаются по сравнению с традиционными диагностиками. Например, временное разрешение настоящей диагностической GPBI-системы составляет приблизительно сотни миллисекунд, что представляет собой существенное улучшение по сравнению с временной шкалой измерения проводных сканеров (несколько секунд).
[20] В примерных вариантах осуществления люминесценция остатка (фона) или впрыскиваемых газов, полученная вследствие столкновений с энергетическими частицами пучка, используется в качестве части неразрушающей диагностической технологии для измерения поперечных размеров (профилей) пучка и положения пучка. Чтобы измерять параметры пучка (например, поперечный размер, местоположение, наклон), свечение люминесценции из области взаимодействия пучка и газа записывается посредством записывающих устройств или компонентов визуализации (например, камер) основанной на визуализации пучковой диагностики, предоставляющих данные по поперечному размеру пучка, местоположению и наклону пучка.
[21] Другие системы, способы, признаки и преимущества изобретения должны становиться очевидными специалистам в области техники после изучения прилагаемых чертежей и подробного описания. Подразумевается, что все подобные дополнительные системы, способы, признаки и преимущества, включенные в это описания, находятся в пределах объема охраны изобретения и защищены прилагаемой формулой изобретения. Никоим образом признаки примерных вариантов осуществления не должны истолковываться в качестве ограничения прилагаемой формулы изобретения, при отсутствии специального перечисления этих признаков в формуле изобретения.
Краткое описание чертежей
[22] Подробное описание предмета изобретения, изложенного в данном документе, как для его структуры, так и для его работы, могут быть очевидными посредством исследования прилагаемых чертежей, на которых аналогичные ссылки с номерами означают как части. Компоненты на чертежах не обязательно должны быть нарисованы в масштабе, вместо этого акцент делается на иллюстрацию принципов изобретения. Более того, все иллюстрации предназначены для того, чтобы передавать общие идеи, при этом относительные размеры, формы и другие подробные атрибуты могут иллюстрироваться схематично, а не буквально или точно.
[23] Фиг. 1A является принципиальной схемой примерного варианта осуществления нейтронно-пучковой системы для использования с вариантами осуществления по настоящему раскрытию.
[24] Фиг. 1B является принципиальной схемой примерного варианта осуществления нейтронно-пучковой системы для применения в бор-нейтронозахватной терапии (БНЗТ).
[25] Фиг. 2 иллюстрирует примерную систему предварительного ускорителя или инжектор пучка ионов для использования с вариантами осуществления по настоящему раскрытию.
[26] Фиг. 3 является видом в перспективе примерного варианта осуществления монитора положения пучка (МПП) инжекционной ионно-пучковой системы, показанной на фиг. 2.
[27] Фиг. 4 является графическим изображением, иллюстрирующим примерные формы волны тока, собранные на электродах примерного монитора положения пучка (МПП) во время искусственного неточного совмещения.
[28] Фиг. 5 является видом в перспективе варианта осуществления откачиваемой насосом камеры инжекционной ионно-пучковой системы, показанной на фиг. 2, с основанной на визуализации пучковой диагностической системой (например, GPBI).
[29] Фиг. 6 является видом в перспективе компонента визуализации основанной на визуализации пучковой диагностической системы (GPBI) для импульсного пучка.
[30] Фиг. 7 иллюстрирует примерную временную схему для использования с вариантами осуществления по настоящему раскрытию.
[31] Фиг. 8 является примерным изображением пучка, полученным посредством основанной на визуализации с помощью впрыска газа пучковой диагностической системы (GPBI).
[32] Фиг. 9 является примером постобработанного изображения, показанного на фиг. 8.
[33] Фиг. 10 является графиком, показывающим пример измеренного интегрированного профиля линии движения пучка.
[34] Фиг. 11A и 11B иллюстрируют блок-схемы, иллюстрирующие примерные варианты осуществления системы управления, с которой могут работать варианты осуществления по настоящему раскрытию.
[35] Фиг. 12 является блок-схемой, иллюстрирующей примерный вариант осуществления вычислительного оборудования, которое может использоваться с вариантами осуществления по настоящему раскрытию.
Подробное описание изобретения
[36] Прежде чем подробно описать настоящий предмет изобретения, следует понимать, что это раскрытие не ограничено конкретными описанными вариантами осуществления, поскольку они, конечно, могут варьироваться. Также следует понимать, что терминология, используемая в данном документе, служит только для цели описания конкретных вариантов осуществления и не имеет намерения ограничивать объем настоящего раскрытия, который ограничен только прилагаемой формулой изобретения.
[37] Термин «частица» широко используется в данном документе и, если не ограничено иначе, может использоваться для указания на электрон, протон (или ион H+) или нейтральную частицу, а также частицу, имеющую более одного электрона, протона и/или нейтрона (например, другие ионы, атомы и молекулы).
[38] В данном документе описываются примерные варианты осуществления систем, устройств и способов диагностики в пучковой системе (например, включающей в себя ускоритель частиц). Варианты осуществления, описанные в данном документе, могут использоваться с любым типом ускорителя частиц либо в любом варианте применения ускорителя частиц, предусматривающем получение пучка заряженных частиц при указанных энергиях для подачи в ускоритель частиц. Варианты осуществления в данном документе могут быть использованы во многих применениях, примером является нейтронно-пучковая система для генерации пучка нейтронов для применения в бор-нейтронозахватной терапии (БНЗТ). Для простоты описания многие варианты осуществления, описанные в данном документе, должны осуществляться в контексте нейтронно-пучковой системы для использования в БНЗТ, хотя варианты осуществления не ограничены ни просто формированием пучков нейтронов, ни БНЗТ-вариантами применения, в частности.
[39] Фиг. 1A является принципиальной схемой примерного варианта осуществления пучковой системы для использования с вариантами осуществления по настоящему раскрытию. Здесь, пучковая система 10 включает в себя источник 22, низкоэнергетическую линию 190 движения пучка (НЛДП), ускоритель 40, соединенный с низкоэнергетической линией 190 движения пучка (НЛДП), и высокоэнергетическую линию 50 движения пучка (ВЛДП), простирающуюся из ускорителя 40 в узел-мишени, размещающий мишень 196. НЛДП 190 выполнена с возможностью транспортировать пучок из источника 22 в ускоритель 40, который выполнен с возможностью ускорять пучок. ВЛДП 50 передает пучок с вывода ускорителя 40 в мишень 196.
[40] В данном документе описываются примерные варианты осуществления систем, устройств и способов для облегчения быстрого мониторинга положения пучка для обнаружения неточного совмещения пучка в линии движения пучка пучковой системы 10. В примерных вариантах осуществления предоставляется простой и надежный монитор положения пучка (МПП). В определенных примерных вариантах осуществления монитор положения пучка (МПП) может включать в себя множество электродов, простирающихся во внутреннюю часть линии движения пучка нейтронно-пучковой системы (НПС). В этих вариантах осуществления монитор положения пучка (МПП) может работать посредством сбора гало-тока пучка электродами. Электроды могут быть гальванически изолированы от стенки МПП и смещены с использованием внешнего источника питания. Смещение относительно стенки МПП может уменьшать долю тока вторичной электронной эмиссии (SEE) в сигнале и может увеличивать гало-ток пучка, собранный из сгенерированной пучком плазмы.
[41] В примерных вариантах осуществления монитор положения пучка (МПП) выполнен с возможностью подавать сигнал или указывать для системы управления, когда пучок, продвигающийся через линию движения пучка, находится вне оси.
[42] Монитор положения пучка (МПП) может иметь уровень чувствительности обнаружения, связанный с уменьшением или исключением вызываемого пучком повреждения компонентов линии движения пучка при минимизации нарушения пучка, продвигающегося через линию движения пучка. Иными словами, минимальная величина тока пучка для пучка, проходящего через компонент линии движения пучка, может быть уменьшена как результат токосъема электродами. Примерные варианты осуществления МПП могут преимущественно работать с пучками постоянного тока, иметь миллисекундное (или меньшее) время отклика и/или принимать мощности пучка в 2,5 МэВ (и выше) в расчете на ядро.
[43] В некоторых примерных вариантах осуществления МПП может представлять собой часть пучковой системы, выполненной с возможностью получения пучка нейтронов из пучка ионов. Пучковая система может включать в себя НЛДП, служащую в качестве инжекционной ионно-пучковой системы, тандемный ускоритель высокого напряжения (HV), соединенный с инжекционной ионно-пучковой системой, и ВЛДП, простирающуюся из тандемного ускорителя в узел нейтронной мишени, вмещающий мишень для получения нейтронов. В этих примерных вариантах осуществления инжектор ионов пучка может включать в себя источник ионов, оптику пучка, включенную в низкоэнергетическую линию движения пучка, простирающуюся от источника ионов, трубку предварительного ускорителя, пучковые диагностические средства и откачиваемую насосом камеру, соединенную с тандемным ускорителем. Источник ионов может генерировать заряженные частицы в объеме плазмы, которые могут вытягиваться, ускоряться, приводиться к требуемым условиям и в конечном счете использоваться для получения нейтронов при доставке в мишень для получения нейтронов. Такие улучшенные, эффективные и компактные системы, устройства и способы, которые ведут мониторинг положения пучка, обеспечивают сохранность оборудования нейтронно-пучковой системы при поддержании эффективности работы.
[44] Система 10 также может включать в себя газовую или практически неинвазивную пучковую диагностическую систему. Эта диагностическая система может включать в себя визуализацию пучка с помощью впрыска газа (GPBI), подходящую для НЛДП, служащей в качестве инжектора пучка для пучковой системы, причем GPBI выполнена с возможностью доставлять информацию о положении и размере пучка в режиме реального времени без возмущения пучка. Кроме того, настоящая диагностическая GPBI-система является подходящей для высокоэнергетической линии движения пучка (ВЛДП) или в, или вблизи ускорителя. Неинвазивная пучковая диагностическая система имеет временное и пространственное разрешение и не имеет верхнего предела на мощность пучка.
[45] В примерных вариантах осуществления люминесценция остатка (фона) или впрыскиваемых газов, полученная вследствие столкновений с энергетическими частицами пучка, используется в качестве части неразрушающей диагностической технологии для измерения поперечных размеров (профилей) пучка и положения пучка. Распространение заряженных частиц через газовую окружающую среду приводит к испусканию излучения вследствие столкновительного возбуждения атомов и молекул газа. Чтобы измерять параметры пучка (поперечный размер, местоположение, наклон), свечение люминесценции из области взаимодействия пучка и газа записывается записывающими устройствами или компонентами визуализации (например, камерами), предоставляющими данные о поперечном размере пучка, местоположении и наклоне пучка. Полученные изображения могут дополнительно соотноситься с фактическим профилем пучка через инверсию Абеля (при определенных допущениях, например, относительно осевой симметрии пучка) либо с использованием томографических технологий.
[46] В примерных вариантах осуществления диагностическая GPBI-система включает в себя один или более компонентов визуализации, и во многих вариантах осуществления по меньшей мере, два (2) ортогонально ориентированных компонента визуализации, соединенные и простирающиеся во внутреннюю часть откачиваемой насосом камеры, и порт для впрыска газа, простирающийся из откачиваемой насосом камеры и обеспечивающих проход в откачиваемую насосом камеру.
[47] Порт для впрыска газа является управляемым так, что число нейтральных частиц, введенных в диагностическую GPBI-систему, регулируется с возможностью избежать взаимодействия с пучком, который должен измеряться или наблюдаться. Иными словами, пучок, проходящий через линию движения пучка, при наблюдении посредством диагностической GPBI-системы, проходит через облако нейтральных частиц без значительного нарушения. В вариантах осуществления газ, впрыскиваемый в вариантах осуществления по настоящему раскрытию, содержит одно или более из аргона или ксенона.
[48] Фиг. 1B является принципиальной схемой, иллюстрирующей примерную нейтронно-пучковой систему 10 для применения в бор-нейтронозахватной терапии (БНЗТ), согласно вариантам осуществления по настоящему раскрытию. Нейтронно-пучковая система 10 включает в себя систему 20 предварительного ускорителя, формирующую по меньшей мере часть НЛДП, причем система 20 предварительного ускорителя служит в качестве инжектора пучка заряженных частиц, как показано на фиг. 2, тандемный ускоритель 40 высокого напряжения (HV), соединенный с системой 20 предварительного ускорителя, и высокоэнергетическую линию 50 движения пучка, простирающуюся из тандемного ускорителя 40 в узел нейтронной мишени 200, вмещающий мишень для получения нейтронов. В этом варианте осуществления источник 22 пучка представляет собой источник ионов, и пучок заряженных частиц представляет собой пучок отрицательных ионов до преобразования в пучок протонов в тандемном ускорителе 40. Следует принимать во внимание, что нейтронно-пучковая система 10, а также система 20 предварительного ускорителя также могут использоваться в других применениях, таких как досмотр грузов и т.п., и не ограничены БНЗТ.
[49] Система 20 предварительного ускорителя (также называемая в данном документе «инжектором пучка заряженных частиц» или «инжектором пучка ионов») выполнена с возможностью передавать пучок ионов из источника 22 ионов на ввод (например, на входную апертуру) тандемного ускорителя 40.
[50] Тандемный ускоритель 40, который питается от источника 42 питания высокого напряжения, соединенного с ним, во многих вариантах осуществления может производить пучок протонов с энергией, обычно равной удвоенному напряжению, приложенному к ускоряющим электродам, расположенным внутри тандемного ускорителя 40. Уровень энергии пучка протонов достигается посредством ускорения пучка отрицательных ионов водорода от ввода тандемного ускорителя 40 до самого крайнего внутреннего электрода с высоким потенциалом, удаления двух электронов из каждого иона и затем ускорения полученных в результате протонов ниже по ходу пучка теми же напряжениями, прикладываемыми в обратном порядке.
[51] Высокоэнергетическая линия 50 движения пучка передает пучок протонов с вывода тандемного ускорителя 40 в генерирующую нейтроны мишень для формирования нейтронов в узле 200 нейтронной мишени, расположенной на конце ветви 70 линии движения пучка, простирающейся в процедурный кабинет для пациентов. Система 10 может быть выполнена с возможностью направлять пучок протонов на любое число из одной или более мишеней и связанных зон лечения. В этом варианте осуществления высокоэнергетическая линия 50 движения пучка включает в себя три ветви 70, 80 и 90, которые простираются в три различных процедурных кабинета для пациентов. Высокоэнергетическая линия 50 движения пучка включает в себя откачиваемую насосом камеру 51, квадрупольные магниты 52 и 72, с тем чтобы предотвращать дефокусировку пучка, дипольные или отклоняющие магниты 56 и 58, с тем чтобы управлять пучком в процедурные кабинеты, корректоры 53 пучка, диагностические средства, такие как мониторы 54 и 76 тока, секцию быстрого монитора 55 положения пучка и сканирующий магнит 74.
[52] Конструкция высокоэнергетической линии 50 движения пучка может зависеть от конфигурации лечебного учреждения (например, одноэтажной конфигурации лечебного учреждения, двухэтажной конфигурации лечебного учреждения и т.п.). Пучок может доставляться в узел 200 мишени (например, расположенный около процедурного кабинета) с использованием отклоняющего магнита 56. Могут быть включены квадрупольные магниты 72, чтобы затем фокусировать пучок до определенного размера на мишени. Затем пучок проходит через один или более сканирующих магнитов 74, что обеспечивает поперечное перемещение пучка на поверхность мишени в требуемом рисунке (например, в спиральном, искривленном, ступенчатом в рядах и колонках, в их комбинациях и т.п.). Поперечное перемещение пучка может помогать достигать сглаженного и даже усредненного во времени распределения пучка протонов на литиевой мишени, предотвращая перегрев и обеспечивая максимально возможную равномерность формирования нейтронов в литиевом слое.
[53] После входа в сканирующие магниты 74, пучок может доставляться в монитор 76 тока, который измеряет ток пучка. Измеренное значение тока пучка может быть использовано для того, чтобы управлять защитной блокировкой. Узел 200 мишени может быть физически отделен от объема высокоэнергетической линии движения пучка с помощью запорного клапана 77. Основная функция запорного клапана представляет собой отделение вакуумного объема линии движения пучка от мишени при замене/загрузке мишени. В вариантах осуществления пучок может не быть изогнут на 90 градусов посредством отклоняющего магнита 56, вместо этого он проходит прямо направо, затем он входит в квадрупольные магниты 52, которые расположены в горизонтальной линии движения пучка. После пучок может быть изогнут другим отклоняющим магнитом 58 до требуемого угла, в зависимости от конфигурации кабинета. В противном случае отклоняющий магнит 58 может заменяться Y-образным магнитом, чтобы расщеплять линию движения пучка в двух направлениях для двух различных процедурных кабинетов, расположенных на одном этаже.
[54] Фиг. 2 иллюстрирует пример системы предварительного ускорителя или инжектора пучка ионов для использования с вариантами осуществления по настоящему раскрытию. В этом примере система 20 предварительного ускорителя включает в себя линзу 30 Эйнцеля (не показана), трубку 26 предварительного ускорителя и соленоид 510 и выполнена с возможностью ускорять пучок отрицательных ионов, инжектированный из источника 22 ионов. Система 20 предварительного ускорителя выполнена с возможностью обеспечивать ускорение частиц пучка до энергий, требуемых для тандемного ускорителя 40, и обеспечивать полную сходимость пучка отрицательных ионов так, что она совпадает с площадью входной апертуры во входной апертуре или на входе тандемного ускорителя 40. Система 20 предварительного ускорителя дополнительно выполнена с возможностью минимизировать или дефокусировать обратный поток по мере того, как он проходит из тандемного ускорителя 40 в систему предварительного ускорителя, чтобы уменьшать возможность повреждения источника ионов и/или обратный поток, достигающий нитей накала источника ионов.
[55] В вариантах осуществления источник 22 ионов выполнен с возможностью обеспечивать пучок отрицательных ионов ниже по потоку от линзы Эйнцеля (не показана), и пучок отрицательных ионов продолжает проходить через трубку 26 предварительного ускорителя и соленоид 510. Соленоид 510 расположен между трубкой предварительного ускорителя и тандемным ускорителем и является электрически соединяемым с подачей питания. Пучок отрицательных ионов проходит через соленоид 510 в тандемный ускоритель 40.
[56] Система 20 предварительного ускорителя также может включать в себя вакуумный контейнер 24 с источником ионов и откачиваемую насосом камеру 28, которые с трубкой 26 предварительного ускорителя, а также другими элементами, описанными выше, представляют собой часть относительно низкоэнергетической линии движения пучка, ведущей к тандемному ускорителю 40. Вакуумный контейнер 24 источника ионов, в котором расположена линза Эйнцеля (не показана), простирается от источника 22 ионов. Трубка 26 предварительного ускорителя может быть соединена с вакуумным контейнером 24 источника ионов, и соленоид 510 может быть соединен с трубкой 26 предварительного ускорителя. Откачиваемая насосом камера 28 может быть соединена с соленоидом 510 и тандемным ускорителем 40. Источник 22 ионов служит в качестве источника заряженных частиц, которые могут быть ускорены, приведены к требуемым условиям и в конечном счете использованы для того, чтобы произвести нейтроны при доставке к генерирующей нейтроны мишени. В дальнейшем в данном документе описываются примерные варианты осуществления со ссылкой на источник ионов, производящий пучок отрицательных ионов водорода, хотя варианты осуществления не ограничены такими, и другие положительные или отрицательные частицы могут быть произведены источником.
[57] Система 20 предварительного ускорителя может иметь нуль, один или множество магнитных элементов для таких целей, как фокусировка и/или регулирование совмещения пучка. Например, любые такие магнитные элементы могут использоваться для того, чтобы согласовать пучок с осью линии движения пучка и углом приема тандемного ускорителя 40. вакуумный контейнер 24 источника ионов может иметь ионную оптику формирования ионных пучков, расположенную в нем.
[58] Предусмотрено два типа источников 22 отрицательных ионов, которые отличаются механизмом генерации отрицательных ионов: поверхностного типа и объемного типа. Поверхностный тип в целом требует присутствия цезия (Cs) на конкретных внутренних поверхностях. Объемный тип основывается на образовании отрицательных ионов в объеме сильноточной разрядной плазмы. Хотя оба типа источников ионов могут доставлять требуемый отрицательный ионный ток для применений, связанных с тандемными ускорителями, источники отрицательных ионов поверхностного типа являются нежелательным для модуляции. Иными словами, для модуляции пучка отрицательных ионов в вариантах осуществления, описанных в данном документе, источники отрицательных ионов объемного типа (например, без использования цезия (Cs)) являются предпочтительными.
[59] Обращаясь к фиг. 3, примерный монитор 30 положения пучка (МПП) (например, либо быстрый монитор положения пучка) включает в себя цилиндрическую стенку 32, простирающуюся между парой фланцев 34, выполненных с возможностью монтировать монитор 30 положения пучка (МПП) вдоль линии движения пучка (например, низкоэнергетической линии движения пучка (НЛДП), включающей в себя систему 20 предварительного ускорителя, ускоритель 40, высокоэнергетическую линию 50 движения пучка (ВЛДП)). В примерах, в которых монитор 30 положения пучка (МПП) монтируется вдоль низкоэнергетической линии движения пучка (НЛДП), монитор положения пучка (МПП) может монтироваться между трубкой 26 предварительного ускорителя и откачиваемой насосом камерой 28. Работа монитора 30 положения пучка (МПП) может быть основана на сборе гало-тока пучка электродами 36, выступающих из стенки 32 и простирающихся во внутреннюю часть линии движения пучка. В примерных вариантах осуществления электроды 36 могут охлаждаться посредством одного или более охлаждающих устройств 41. В примерных вариантах осуществления одно или более охлаждающих устройств могут содержать водяные охлаждающие устройства.
[60] На фиг. 3 монитор 30 положения пучка (МПП) показан как включающий в себя четыре электрода 36, хотя варианты осуществления не ограничены четырьмя электродами (например, любое число электродов может использоваться в пределах объема настоящего раскрытия). Электроды 36 предпочтительно имеют форму цилиндров и изготовлены из одного или более из тантала (Ta) или вольфрама (W), чтобы увеличивать сопротивление тепловому потоку. Электроды 36 также могут быть изготовлены из композиционных материалов, которые имеют возможность выдерживать тепловую нагрузку, сгенерированную пучком. Длина вставки (например, расстояние простирания электрода во внутреннюю часть линии движения пучка) электрода 36 может регулироваться по отдельности для каждого электрода 36 (например, с использованием системы управления, не показанной на фиг. 3), позволяя пользователю адаптировать монитор 30 положения пучка (МПП) для пучков произвольных размеров. Электроды 36 выполнены подвергаемыми воздействию гало-тока пучка, в силу чего собранный поток мощности ожидаемо должен быть гораздо ниже. Кроме того, плазма, сформированная вблизи области взаимодействия остаточного газа и пучка, расширяется до внешней границы пучка, формирующей дополнительный сигнал для монитора 30 положения пучка (МПП).
[61] Электроды 36 могут быть гальванически изолированы от стенки 32 МПП и смещены с использованием внешнего источника питания. Смещение относительно стенки 32 a) МПП может уменьшать долю тока вторичной электронной эмиссии (SEE) в сигнале и b) может увеличивать гало-ток пучка, собранный из сформированной пучком плазмы.
[62] В то время, когда пучковая система работает, и пучок вытягивается из источника (например, 22) и распространяется через компоненты (например, 190, 40, 50, 196) примерной пучковой системы (например, 10), монитор 30 положения пучка (МПП) обеспечивает возможность системе управления активно вести мониторинг положения пучка. Каждый электрод 36 может иметь связанное с ним пороговое значение тока (например, пороговое значение по уровню сигнала). Когда собранный ток (например, либо сигнал) данным электродом превышает свое пороговое значение тока, пучок может считаться отклоненным слишком далеко к этому электроду и по сути находящимся вне оси. Монитор (30) положения пучка может выдавать индикацию того, что ток, собранный электродом, превышает пороговое значение тока, в систему управления, и система управления может регулировать параметры одного или более компонентов всей пучковой системы (например, 10), чтобы перемещать пучок назад по направлению оси. Примеры регулируемых параметров могут включать в себя входные данные, выдаваемые в магниты управления пучком так, что положения магнитов управления пучком изменяются, чтобы перемещать пучок назад на требуемую ось. Таким образом, монитор 30 положения пучка (МПП) вместе с системой управления непрерывно/многократно и в режиме реального времени обеспечивает обратную связь в магниты управления пучком и/или другие компоненты пучковой системы.
[63] В вариантах осуществления пороговое значение тока, связанное с данным электродом, может отличаться от порогового значения тока, связанного с другим электродом монитора (30) положения пучка. Дополнительно, данный электрод может иметь связанные с ним множество пороговых значений тока для более детализированного обнаружения положения пучка. Иными словами, несколько пороговых значений тока могут быть использованы с электродами монитора положения пучка (например, 30). Обнаружение перемещения пучка от оси в направлении между электродами может быть основано на нескольких пороговых значениях тока, связанных со смежными электродами.
[64] Например, пара смежных электродов может регистрировать увеличение уровня сигнала (например, собранного тока); однако увеличение уровня сигнала может превышать второе меньшее пороговое значение тока, связанное с каждым электродом пары смежных электродов. В таком примере уровень сигнала, превышающий второе меньшее пороговое значение тока, связанное с каждым электродом из пары смежных электродов, может указывать то, что пучок находится во вне осевом направлении между электродами.
[65] Соответственно, система управления может регулировать магниты управления пучком на основе индикации того, что уровень сигнала превышает одно пороговое значение для одного электрода монитора 30 положения пучка (МПП), либо на основе индикации того, что уровень сигнала превышает два нижних пороговых значения для смежных электродов.
[66] Кроме того, система управления может вести мониторинг величин сигнала для каждого из электродов и экстраполировать степень отклонения пучка в конкретном направлении на основе величин сигнала (например, независимо либо в комбинации с одним или более пороговых значений тока, связанных с электродами). Система управления затем может регулировать магниты управления пучком или другие параметры, на основе экстраполированной степени(ей) отклонения пучка, чтобы компенсировать отклонение пучка и возвращать пучок к требуемой оси. В таких примерах, система управления может непрерывно и в режиме реального времени регулировать параметры линии движения пучка, такие как положения магнитов управления пучком, на основе минимальной величины обнаруженного отклонения (например, порогового значения отклонения).
[67] В примерах, может быть затруднительным прогнозировать уровень сигнала для МПП-электродов 36. Соответственно, до работы может требоваться или выполняться калибровка МПП 30. Калибровка может осуществляться посредством управляемого и безопасного сдвига пучка от оси линии движения пучка и съема тока в МПП-электродах 36.
[68] Импульсный режим работы пучка может быть предпочтительным во время калибровки МПП 30, чтобы уменьшать общую вкладываемую энергию пучка в МПП 30 и в других компонентах линии движения пучка. Другие диагностические средства положения пучка (например, визуализация пучка с помощью впрыска газа) также могут быть предусмотрены совместно с калибровкой МПП, чтобы удовлетворять нормативам по безопасности или другим правилам.
[69] В примерах работа примерного МПП 30 тестируется в примерной низкоэнергетической линии движения пучка (НЛДП) (например, 190, включающей в себя систему 20 предварительного ускорителя) примерной нейтронно-пучковой системы 10 (НПС). В тестах, общий ток пучка отрицательных ионов водорода в НЛДП составляет приблизительно 12 миллиампер (мА). Чтобы демонстрировать производительность МПП 30, пучок намеренно отклонен от оси линии движения пучка с использованием магнитов для управления вдоль оси X и Y. Формы волны тока, собранные каждым МПП-электродом 36, показаны на фиг. 4. Как показано на фиг. 4, МПП-электроды 36 собирают большие токи, когда пучок намеренно неправильно совмещается с использованием магнитов для управления вдоль оси X и Y. Максимальные значения тока отображаются, как и минимальные значения тока. На основе результатов, проиллюстрированных на фиг. 4, пороговый ток для каждого БМПП-электрода 36 может задаваться, с тем чтобы передавать сигналы в систему управления в отношении того, что пучок неправильно совмещен. Время отклика МПП 30 составляет 4 микросекунды (мкс) в тестах, используемых для формирования результатов, проиллюстрированных на фиг. 4.
[70] Небольшая величина тока пучка, собранного посредством МПП-электродов 36 в нормальном режиме работы, преимущественно обеспечивает длительный ресурс МПП 30. Иными словами, благодаря небольшой величине тока пучка, собранного посредством МПП-электродов 36, вызываемое пучком повреждение, приводящее к истечению срока службы одного или более компонентов МПП 30, можно избежать или значительно задержать.
[71] Примерный МПП преимущественно обеспечивает обнаружение анормального поведения пучка с микросекундным разрешением. В конкретных вариантах осуществления время отклика МПП может быть основано на скоростях получения данных считывающего электронного оборудования. МПП преимущественно предоставляет быстрое оповещение/уведомление относительно неточного совмещения пучка в систему управления.
[72] МПП 30 преимущественно обеспечивает возможность независимого регулирования длины вставки каждого электрода 36 (например, расстояния простирания электрода во внутреннюю часть линии движения пучка) так, что небольшие отклонения пучка могут обнаруживаться быстрее (например, со сниженным временем отклика) с помощью больших сигналов. Это улучшает время реакции МПП для пучков произвольной (в том числе довольно сложной) формы.
[73] Каждый электрод 36 может быть связан с уникальным положением электрода в мониторе положения пучка (МПП), и каждое уникальное положение электрода может быть регулируемым. Соответственно, хотя пара электродов может быть разнесена на данное расстояние, такое расстояние также является регулируемым.
[74] МПП 30 не ограничен использованием в конкретных примерах, описанных в данном документе, и также может использоваться в пучковых системах, реализованных в процессах производства или изготовления, таких как изготовление полупроводниковых микросхем, изменение свойств материала (к примеру, поверхностная обработка), облучение пищевых продуктов и разрушение патогенов в медицинской стерилизации. МПП 30 дополнительно может использоваться в применениях визуализации, таких как досмотр грузов или контейнеров. Кроме того, в качестве другого неисчерпывающего примера, МПП 30 может использоваться в ускорителях частиц для медицинских применений, таких как медицинские системы диагностики, системы медицинской визуализации или другие не связанные с БНЗТ системы лучевой терапии.
[75] Обращаясь к фиг. 5, откачиваемая насосом камера 28 может иметь множество наборов (например, два, как проиллюстрировано на фиг. 5) для основанных на визуализации пучковых диагностических средствах 500, установленных в поперечном (например, ортогональном) направлении к оси B распространения пучка. Такая компоновка основанных на визуализации пучковых диагностических средств 500 обеспечивает характеризацию пучка в направлении, поперечном направлению распространения пучка. Порт 31 для впрыска газа (частично показан) простирается из откачиваемой насосом камеры 28 и обеспечивает проход во внутреннюю часть откачиваемой насосом камеры 28. Турбомолекулярный насос 29 сверху откачиваемой насосом камеры 28 может использоваться для того, чтобы откачивать газ, впрыскиваемый через порт 31 для впрыска газа. Турбомолекулярный насос 29 также может поддерживать желательное или требуемое давление фонового газа в по меньшей мере низкоэнергетической линии 20 движения пучка.
[76] Фиг. 6 иллюстрирует примерный вариант осуществления основанной на визуализации пучковой диагностической системы 500. В вариантах осуществления записывающее устройство или компонент 33 визуализации (например, камера) может соединяться с линзой 35. Линза 35 может использоваться для того, чтобы определять поле обзора и пространственное разрешение основанной на визуализации пучковой диагностической системы 500. Апертура 39 на конце оптической трубки 38 может совпадать или совмещаться с записывающим устройством 33 (например, с камерой) и линзой 35 и использоваться для того, чтобы отсекать большую часть фонового света, который в противном случае может достигать датчика (не показан) записывающего устройства или компонента визуализации (например, камеры). Чтобы дополнительно уменьшать фоновый шум (например, фоновый свет), интерференционный полосовой фильтр (не показан) необязательно может быть установлен внутри фильтродержателя 37, который может быть расположен между оптической трубкой 38 и линзой 35.
[77] Впрыск газа может приводиться в действие посредством газового клапана (не показан), соединенного с клапаном 31 впрыска газа (показан на фиг. 5). Газовый клапан (не показан) может приводить в действие впрыск газа с управляемой длительностью открытого состояния газового клапана, обеспечивающей управление количеством газа, впрыскиваемого в откачиваемую насосом камеру 28, а также управление или выбор времени, когда газ впрыскивается в откачиваемую насосом камеру 28.
[78] Газовый клапан, записывающее устройство(а) и другие компоненты основанной на визуализации пучковой диагностической системы 500 могут управляться посредством системы управления (не показана; пример которой проиллюстрирован на фиг. 11A и 11B).
[79] Может быть желательным выбирать местоположение впрыска газа и конструкцию сопла таким образом, чтобы достигать равномерного распределения газа в поле обзора записывающего устройства или компонента 33 визуализации (например, камеры). Это позволяет значительно улучшать линейность собранного сигнала и облегчать анализ данных.
[80] В примерных вариантах осуществления примерная основанная на визуализации пучковая диагностическая система 500 может быть выполнена с возможностью отслеживать пучок заряженных частиц пучковой системы, работающей как в DC-режиме, так и импульсных режимах. Это может быть реализовано согласно примерной временной схеме, показанной на фиг. 7. Инициирование основанной на визуализации пучковой диагностической системы 500 может быть произвольным для пучков постоянного тока. В случае формирования импульсного пучка газовый клапан может быть инициирован до импульса пучка, чтобы обеспечивать присутствие газа в диагностическом поле обзора пучковой диагностической системы 500, а также однородность газа. Инициирование записывающего устройства или компонента визуализации (например, камеры) может задерживаться относительно импульса пучка, чтобы приспособиться к времени достижения равновесия пучка, а также к задержке при флуоресцентном излучении. Время экспозиции детектора камеры может регулироваться, чтобы накапливать максимально возможно большую часть сигнала при поддержании отношения «сигнал-шум» (SNR) на самом высоком уровне.
[81] Необработанное изображение, полученное примерным записывающим устройством (например, камерой) примерной основанной на визуализации пучковой диагностической системы 500, показано на фиг. 8. Пучок является видимым в середине изображения. Иными словами, 30 кэВ, 12 мА отрицательных ионов водорода распространяются слева направо на изображении по фиг. 8. Однородный черный фон формируется посредством просмотрового поглотителя (не показан), установленного внутри вакуумной камеры. Постобработанное изображение с удаленным фоном, искусственно измененным масштабом, с тем чтобы подчеркивать пучок, и демонстрирующее приблизительно 10-миллиметровую (мм) длину пучка, представлено на фиг. 9.
[82] Изображение на фиг. 9, очищенное от фонового света, дополнительно может использоваться для того, чтобы получать положение пучка внутри НЛДП, поперечный размер и наклон пучка, которые в режиме реального времени передаются в систему управления (см., например, фиг. 11A, 11B). Размер пучка оценивается при 90% тока пучка. Этот уровень может регулироваться в зависимости либо от предполагаемого, либо измеренного распределения тока пучка. SNR изображение может дополнительно улучшаться за счет использования полосового фильтра (см., например, фиг. 6), чтобы ограничивать сбор полезным сигналом и обеспечивать более эффективное отсечение фонового света.
[83] Пример измеренного интегрированного профиля линии движения пучка показан на фиг. 10, который иллюстрирует гауссово распределение тока пучка и показывает то, что размер пучка составляет приблизительно 10 мм, вычисленное при 90%-м уровне тока пучка. Радиальное расстояние на фиг. 10 обнуляется в центроиде пучка (по сравнению с фиг. 9). Фактический профиль пучка может быть восстановлен из фиг. 10 с использованием, например, алгоритма инверсии Абеля (на основе симметрии пучка) либо с использованием томографических технологий.
[84] Чтобы оценивать наклон пучка относительно оси низкоэнергетической линии движения пучка (НЛДП), центроиды пучка вычисляются вдоль распространения пучка и сравниваются с координатами оси линии движения пучка, полученными во время калибровки основанной на визуализации пучковой диагностической системы.
[85] Основанная на визуализации пучковая диагностическая система 500 может быть размещена в любом требуемом местоположении линии движения пучка либо на стороне более низкой энергии ускорителя, либо в самом ускорителе или на стороне более высокой энергии. Система 500 не ограничена использованием в конкретных примерах, описанных в данном документе, и также может использоваться в пучковых системах, реализованных в процессах производства или изготовления, таких как изготовление полупроводниковых микросхем, изменение свойств материала (к примеру, поверхностная обработка), облучение пищевых продуктов и разрушение патогенов в медицинской стерилизации. Система 500 дополнительно может использоваться в применениях визуализации, таких как досмотр грузов или контейнеров. Кроме того, в качестве другого неисчерпывающего примера система 500 может использоваться в ускорителях частиц для медицинских применений, таких как медицинские системы диагностики, системы медицинской визуализации или другие не связанные с БНЗТ системы лучевой терапии.
[86] Фиг. 11A и 11B являются блок-схемами, иллюстрирующими примерные варианты осуществления системы управления, с которой могут работать варианты осуществления по настоящему раскрытию. Например, проиллюстрированная примерная система включает в себя пучковую систему 10 и одно или более вычислительных устройств 3002. В вариантах осуществления пучковая система 10 может представлять собой часть примерной нейтронно-пучковой системы (например, вышеуказанной системы 10). В таких вариантах осуществления пучковая система 10 может использовать одну или более систем 3001A управления, с которыми могут обмениваться данными одно или более вычислительных устройств 3002, чтобы взаимодействовать с системами и компонентами пучковой системы 10 (например, нейтронно-пучковой системы 10). Каждое из этих устройств и/или систем выполнено с возможностью обмениваться данными непосредственно друг с другом или через локальную сеть, к примеру, сеть 3004.
[87] Вычислительные устройства 3002 могут осуществляться посредством различных пользовательских устройств, систем, вычислительного оборудования и т.п. Например, первое вычислительное устройство 3002 может представлять собой настольный компьютер, связанный с конкретным пользователем, в то время как другое вычислительное устройство 3002 может представлять собой переносной компьютер, связанный с конкретным пользователем, и еще одно другое вычислительное устройство 3002 может представлять собой мобильное устройство (например, планшетное или интеллектуальное устройство). Каждое из вычислительных устройств 3002 может быть выполнено с возможностью обмениваться данными с пучковой системой 10, например, через пользовательский интерфейс, доступный через вычислительное устройство. Например, пользователь может выполнять настольное приложение на вычислительном устройстве3002, которое выполнено с возможностью обмениваться данными с пучковой системой 10.
[88] Используя вычислительное устройство 3002, чтобы обмениваться данными с пучковой системой 10, пользователь может предоставлять рабочие параметры для пучковой системы 10 (например, рабочие напряжения и т.п.) согласно вариантам осуществления, описанным в данном документе. В вариантах осуществления пучковая система 10 может включать в себя систему 3001A управления, посредством которой пучковая система 10 может принимать и применять рабочие параметры из вычислительного устройства 3002.
[89] Система 3001A управления может быть выполнена с возможностью принимать измерения, сигналы или другие данные из компонентов пучковой системы 10. Например, система 3001A управления может принимать сигналы из примерного монитора 30 положения пучка (МПП) (например, фиг. 11A), указывающие положение пучка, проходящего через пучковую систему 10. Система 3001A управления, в зависимости от положения пучка, проходящего через пучковую систему, может обеспечивать регулировки на входные данные одного или более компонентов 3006 линии движения пучка, к примеру, магнитов управления пучком, чтобы изменять положение пучка согласно способам, описанным в данном документе. Система 3001A управления также может выдавать информацию, собранную из любых компонентов пучковой системы 10, включающих в себя монитор 30 положения пучка (МПП) (например, фиг. 11A), в вычислительное устройство 3002 непосредственно либо через сеть 3004 связи.
[90] Например, система 3001A управления может принимать сигналы из примерной пучковой диагностической системы 500 (например, фиг. 11B), указывающие положение пучка, проходящего через пучковую систему 10, поперечный размер пучка, наклон пучка, распределение тока пучка и т.п. Система 3001A управления, в зависимости от принимаемых сигналов, может выдавать регулировки на входные данные одного или более компонентов 3006 линии движения пучка, чтобы изменять положение или другие параметры пучка согласно способам, описанным в данном документе. Например, система 3001A управления может инициировать газовый клапан до импульса пучка, чтобы обеспечивать присутствие газа в диагностическом поле обзора пучковой диагностической системы 500 (например, фиг. 11B), а также однородность газа. Система 3001A управления дополнительно может задерживать триггер записывающего устройства или компонента визуализации (например, камеры) относительно импульса пучка, чтобы приспособиться к времени достижения равновесия пучка, а также к задержке при флуоресцентном излучении. Система 3001A управления дополнительно может регулировать время экспозиции детектора камеры, чтобы накапливать максимально возможно большую часть сигнала при поддержании отношения «сигнал-шум» (SNR) на самом высоком уровне.
[91] Система 3001A управления также может выдавать информацию, собранную из любых из компонентов пучковой системы 10, включающих в себя пучковую диагностическую систему 500 (например, фиг. 11B), в вычислительное устройство 3002 непосредственно либо через сеть 3004 связи.
[92] Сеть 3004 связи может включать в себя любую сеть проводной или беспроводной связи, включающую в себя, например, проводную или беспроводную локальную вычислительную сеть (LAN), персональную вычислительную сеть (PAN), общегородскую вычислительную сеть (MAN), глобальную вычислительную сеть (WAN) и т.п., а также любые аппаратные средства, программное обеспечение и/или микропрограммное обеспечение, требуемое для того, чтобы реализовывать означенное (такие как, например, сетевые маршрутизаторы и т.д.). Например, сеть 3004 связи может включать в себя 802.11-, 802.16-, 802.20- и/или WiMAX-сеть. Дополнительно, сеть 3004 связи может включать в себя сеть общего пользования, к примеру, Интернет, частную сеть, к примеру, сеть intranet, либо комбинацию вышеозначенного, и может использовать множество сетевых протоколов, доступных на настоящий момент или разработанных в дальнейшем, включающих в себя, но не только, сетевые протоколы на основе TIP/IP.
[93] Вычислительное устройство 3002 и система 3001A управления могут быть осуществлены посредством одной или более вычислительных систем, таких как оборудование 3100, показанное на фиг. 12. Как проиллюстрировано на фиг. 12, оборудование 3100 может включать в себя процессор 3102, запоминающее устройство 3104, схему 3106 ввода и/или вывода и устройство или схему 3108 связи. Также следует понимать, что некоторые из этих компонентов 3102-3108 могут включать в себя аналогичные аппаратные средства. Например, два компонента могут обеспечивать использование одинакового процессора, сетевого интерфейса, носителя хранения данных и т.п. для того, чтобы выполнять свои связанные функции, так что дублированные аппаратные средства не требуются для каждого устройства. Использование терминов «устройство» и/или «схема» при использовании в данном документе относительно компонентов оборудования в силу этого может охватывать конкретные аппаратные средства, выполненные с программным обеспечением с возможностью выполнять функции, связанные с этим конкретным устройством, как описано в данном документе.
[94] Термины «устройство» и/или «схема» должны пониматься широко как включающие в себя аппаратные средства, в некоторых вариантах осуществления устройство и/или схема также может включать в себя программное обеспечение для конфигурирования аппаратных средств. Например, в некоторых вариантах осуществления устройство и/или схема может включать в себя схему обработки, носители хранения данных, сетевые интерфейсы, устройства ввода-вывода и т.п. В некоторых вариантах осуществления другие элементы оборудования 3100 могут предоставлять или дополнять функциональность конкретного устройства. Например, процессор 3102 может обеспечивать функциональность обработки, запоминающее устройство 3104 может обеспечивать функциональность хранения данных, устройство или схема 3108 связи может обеспечивать функциональность сетевого интерфейса и т.п.
[95] В некоторых вариантах осуществления процессор 3102 (и/или сопроцессор или любая другая схема обработки, помогающая или иным образом связанная с процессором) может поддерживать связь с запоминающим устройством 3104 через шину для передачи информации между компонентами оборудования. Запоминающее устройство 3104 может быть энергонезависимым и может включать в себя, например, одно или более энергозависимых и/или энергонезависимых запоминающих устройств. Другими словами, например, запоминающее устройство может представлять собой электронное устройство хранения данных (например, машиночитаемый носитель хранения данных). Запоминающее устройство 3104 может быть выполнено с возможностью сохранять информацию, данные, контент, приложения, инструкции и т.п., для обеспечения возможности оборудованию выполнять различные функции в соответствии с примерными вариантами осуществления по настоящему раскрытию.
[96] Процессор 3102 может осуществляться рядом различных способов и, например, может включать в себя одно или более обрабатывающих устройств, выполненных с возможностью работать независимо. Дополнительно или альтернативно, процессор может включать в себя один или более процессоров, выполненных с возможностью совместно через шину обеспечивать независимое выполнение инструкций, конвейерную обработку и/или многопоточную обработку. Использование терминов «обрабатывающее устройство» и/или «схема обработки» может пониматься как включающее в себя одноядерный процессор, многоядерный процессор, несколько процессоров, внутренних для оборудования, и/или удаленных или «облачных» процессоров.
[97] В примерном варианте осуществления процессор 3102 может быть выполнен с возможностью выполнять инструкции, сохраненные в запоминающем устройстве 3104 или иными способами доступные для процессора. Альтернативно или дополнительно, процессор 3104 может быть выполнен с возможностью выполнять жестко закодированную функциональность. В связи с этим, независимо от того, сконфигурирован посредством аппаратных или программных способов либо посредством комбинации аппаратных средств с программным обеспечением, процессор 3104 может представлять объект (например, физически осуществленный в схеме), допускающий выполнение операций согласно варианту осуществления по настоящему раскрытию, при надлежащем конфигурировании. Альтернативно, в качестве другого примера, когда процессор осуществляется в качестве модуля выполнения программных инструкций, инструкции могут конкретно конфигурировать процессор с возможностью выполнять алгоритмы и/или операции, описанные в данном документе, когда инструкции выполняются.
[98] В некоторых вариантах осуществления оборудование 3100 может включать в себя устройство 3106 ввода-вывода, которое может, в свою очередь, поддерживать связь с процессором 3102, чтобы обеспечивать вывод пользователю и в некоторых вариантах осуществления принимать ввод от пользователя. Устройство 3106 ввода-вывода может включать в себя пользовательский интерфейс и может включать в себя дисплей устройства, к примеру, дисплей пользовательского устройства, который может включать в себя пользовательский веб-интерфейс, мобильное приложение, клиентское устройство и т.п. В некоторых вариантах осуществления устройство 3106 ввода-вывода также может включать в себя клавиатуру, мышь, джойстик, сенсорный экран, области касания, программируемые клавиши, микрофон, динамик или другие механизмы ввода-вывода. Процессор и/или пользовательская интерфейсная схема, включающая в себя процессор, может быть выполнена с возможностью управлять одной или более функций одного или более элементов пользовательского интерфейса через компьютерные программные инструкции (например, программное обеспечение и/или микропрограммное обеспечение), сохраненные в запоминающем устройстве, доступном для процессора (например, в запоминающем устройстве 3104 и/или т.п.).
[99] Устройство или схема 3108 связи может представлять собой средство, осуществленное в аппаратных средствах либо в комбинации аппаратных средств и программного обеспечения, которое выполнено с возможностью принимать и/или передавать данные из/в сеть и/или любое другое устройство или схему, поддерживающую связь с оборудованием 3100. В этом отношении устройство или схема 3108 связи может включать в себя, например, сетевой интерфейс для обеспечения связи с сетью проводной или беспроводной связи. Например, устройство или схема 3108 связи может включать в себя одну или более сетевых интерфейсных плат, антенн, шин, коммутаторов, маршрутизаторов, модемов и опорных аппаратных средств и/или программное обеспечение либо любое другое устройство, подходящее для обеспечения связи через сеть. Дополнительно или альтернативно, интерфейс связи может включать в себя схему для взаимодействия с антенной(ами), с тем чтобы инструктировать передачу сигналов через антенну(ы) или обрабатывать прием сигналов, принимаемых через антенну(ы). Эти сигналы могут передаваться посредством оборудования 3100 с использованием любой из ряда технологий на основе беспроводных персональных вычислительных сетей (PAN), таких как текущие и будущие Bluetooth-стандарты (включающие в себя технологию Bluetooth и технологию Bluetooth с низким энергопотреблением (BLE)), инфракрасная беспроводная связь (например, IrDA), FREC, стандарт сверхширокополосной связи (UWB), индукционная беспроводная передача и т.п. Помимо этого, следует понимать, что эти сигналы могут передаваться с использованием Wi-Fi, связи ближнего радиуса действия (NFC), стандарта общемировой совместимости широкополосного беспроводного доступа (WiMax) или других протоколов связи на основе близости.
[100] Следует принимать во внимание, что любые такие компьютерные программные инструкции и/или другой тип кода может загружаться на компьютер, процессор или другую программируемую схему оборудования, чтобы формировать машину, так что компьютер, процессор или другая программируемая схема, которая выполняет код на машине, создает средства для реализации различных функций, включающих в себя функции, описанные в данном документе.
[101] Как описано выше, и следует принимать во внимание, что на основе этого раскрытия варианты осуществления по настоящему раскрытию могут быть сконфигурированы как системы, способы, мобильные устройства, внутренние интерфейсные сетевые устройства и т.п. Соответственно, варианты осуществления могут содержать различные средства, включающие в себя полностью аппаратные средства либо любую комбинацию программного обеспечения и аппаратных средств. Кроме того, варианты осуществления могут принимать форму компьютерного программного продукта на по меньшей мере одном энергонезависимом машиночитаемом носителе хранения данных, имеющем машиночитаемые программные инструкции (например, компьютерное программное обеспечение), осуществленные в носителе хранения данных. Может использоваться любой подходящий машиночитаемый носитель хранения данных, включающий в себя энергонезависимые жесткие диски, CD-ROM, флэш-память, оптические устройства хранения данных или магнитные устройства хранения данных.
[102] Схема обработки для использования с вариантами осуществления по настоящему раскрытию может включать в себя один или более процессоров, микропроцессоров, контроллеров и/или микроконтроллеров, каждый из которых может представлять собой дискретную микросхему либо распределяться между (и составлять часть) определенным числом различных микросхема. Схема обработки для использования с вариантами осуществления по настоящему раскрытию может включать в себя процессор цифровых сигналов, который может реализовываться в аппаратных средствах и/или в программном обеспечении схемы обработки для использования с вариантами осуществления по настоящему раскрытию. Схема обработки для использования с вариантами осуществления по настоящему раскрытию может функционально соединяться с другими компонентами чертежей в данном документе. Схема обработки для использования с вариантами осуществления по настоящему раскрытию может выполнять программные инструкции, сохраненные в запоминающем устройстве, которые инструктируют схеме обработки осуществлять множество различных действий и управлять другими компонентами на чертежах в данном документе.
[103] Запоминающее устройство для использования с вариантами осуществления по настоящему раскрытию может совместно использоваться посредством одного или более различных функциональных модулей либо может распределяться между двумя или более из них (например, в качестве отдельных запоминающих устройств, присутствующих в различных микросхемах). Запоминающее устройство также может представлять собой отдельную собственную микросхему. Запоминающее устройство может быть энергонезависимым и может представлять собой энергозависимое (например, RAM и т.д.) и/или энергонезависимое запоминающее устройство (например, ROM, флэш-память, FRAM и т.д.).
[104] Компьютерные программные инструкции для выполнения операций в соответствии с описанным предметом изобретения могут быть написаны на любой комбинации одного или более языков программирования, включающих в себя объектно-ориентированный язык программирования, к примеру, Java, JavaScript, Smalltalk, C++, C#, Transact-SQL, XML, PHP и т.п., и традиционные процедурные языки программирования, к примеру, язык программирования «C» или аналогичные языки программирования.
[105] Различные аспекты настоящего предмета изобретения изложены ниже, при анализе и/или в дополнении к вариантам осуществления, описанным выше, при этом акцент делается на взаимозависимость и взаимозаменяемость нижеприведенных вариантов осуществления. Другими словами, акцент делается на том факте, что каждый признак вариантов осуществления может комбинироваться с каждым другим признаком, если иное не указано в явной форме или не является логически неправдоподобным.
[106] В некоторых вариантах осуществления монитор положения пучка включает в себя множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка. В некоторых из этих вариантов осуществления монитор положения пучка выполнен с возможностью обнаруживать положение пучка, проходящего через компонент линии движения пучка, на основе гало-тока пучка. В некоторых из этих вариантов осуществления монитор положения пучка дополнительно включает в себя охлаждающее устройство.
[107] В некоторых из этих вариантов осуществления каждый электрод из упомянутого множества электродов связан с пороговым значением тока. В некоторых из этих вариантов осуществления по меньшей мере один электрод из упомянутого множества электродов связан с пороговым значением тока, отличным от порогового значения тока для одного или более других электродов из упомянутого множества электродов. В некоторых из этих вариантов осуществления каждый электрод из упомянутого множества электродов связан с упомянутого множеством пороговых значений тока.
[108] В некоторых из этих вариантов осуществления монитор положения пучка выполнен с возможностью передавать сигнал в систему управления, когда измеренный ток посредством одного или более электродов из упомянутого множества электродов превышает свое связанное пороговое значение тока. В некоторых из этих вариантов осуществления монитор положения пучка выполнен с возможностью передавать сигнал в систему управления, когда измеренный ток посредством смежных электродов из упомянутого множества электродов превышает нижнее пороговое значение из упомянутого множества пороговых значений тока, связанных с каждым электродом из смежных электродов.
[109] В некоторых из этих вариантов осуществления каждый электрод из упомянутого множества электродов связан с расстоянием простирания электрода. В некоторых из этих вариантов осуществления расстояние простирания электрода представляет собой расстояние во внутреннюю часть компонента, на которое простирается электрод. В некоторых из этих вариантов осуществления расстояние простирания каждого электрода является регулируемым.
[110] В некоторых из этих вариантов осуществления упомянутое множество электродов гальванически изолированы от стенки монитора положения пучка. В некоторых из этих вариантов осуществления упомянутое множество электродов выполнены смещаемыми посредством внешнего источника питания.
[111] В некоторых из этих вариантов осуществления монитор положения пучка выполнен с возможностью передавать сигнал в систему управления, когда пучок, продвигающийся через линию движения пучка, находится вне оси. В некоторых из этих вариантов осуществления минимальная величина тока пучка для пучка, проходящего через компонент линии движения пучка, уменьшается из-за упомянутого множества электродов.
[112] В некоторых вариантах осуществления пучковая система включает в себя монитор положения пучка, выполненный с возможностью обнаруживать положение пучка, проходящего через компонент линии движения пучка, на основе гало-тока пучка. В некоторых из этих вариантов осуществления пучковая система дополнительно включает в себя систему управления, выполненную с возможностью регулировать параметры линии движения пучка на основе положения пучка.
[113] В некоторых из этих вариантов осуществления монитор положения пучка включает в себя множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка.
[114] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления принимать один или более сигналов от монитора положения пучка, и на основе упомянутого одного или более сигналов передавать инструкции, чтобы прерывать работу пучковой системы.
[115] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления принимать один или более сигналов от монитора положения пучка и на основе упомянутого одного или более сигналов передавать данные, представляющие упомянутые один или более сигналов, в вычислительное устройство.
[116] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления принимать один или более сигналов от монитора положения пучка. В некоторых из этих вариантов осуществления систему управления заставляют на основе упомянутого одного или более сигналов определять то, что пучок находится вне требуемой оси, и передавать сигналы регулирования в один или более компонентов линии движения пучка, чтобы регулировать положение пучка так, что он возвращается на требуемую ось.
[117] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления принимать один или более сигналов от монитора положения пучка. В некоторых из этих вариантов осуществления систему управления дополнительно заставляют на основе упомянутых одного или более сигналов определять степень отклонения пучка от требуемой оси и передавать сигналы регулирования в один или более компонентов линии движения пучка, чтобы компенсировать степень отклонения пучка от требуемой оси.
[118] В некоторых из этих вариантов осуществления упомянутые один или более компонентов линии движения пучка включают в себя один или более магнитов управления пучком. В некоторых из этих вариантов осуществления сигналы регулирования регулируют положения упомянутого одного или более магнитов управления пучком.
[119] В некоторых из этих вариантов осуществления упомянутые один или более сигналов представляют собой измеренный ток посредством одного или более электродов из упомянутого множества электродов.
[120] В некоторых из этих вариантов осуществления упомянутые один или более сигналов представляют собой измеренный ток посредством одного или более электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное с упомянутыми одним или более электродов.
[121] В некоторых из этих вариантов осуществления упомянутые один или более сигналов представляют измеренный ток посредством смежных электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное со смежными электродами.
[122] В некоторых из этих вариантов осуществления пучковая система включает в себя монитор положения пучка согласно любому из вышеприведенных вариантов осуществления.
[123] В некоторых из этих вариантов осуществления пучковая система включает в себя источник ионов, выполненный с возможностью генерировать ионы, и тандемный ускоритель, выполненный с возможностью ускорять ионы, распространяемые из источника ионов. В некоторых из этих вариантов осуществления один или более мониторов положения пучка расположены в одном или более из выше по ходу пучка от тандемного ускорителя или ниже по ходу пучка от тандемного ускорителя.
[124] В некоторых вариантах осуществления нейтронно-пучковая система включает в себя систему предварительного ускорителя, выполненную с возможностью ускорять ионы из источника ионов, тандемный ускоритель, выполненный с возможностью ускорять ионы из системы предварительного ускорителя, и монитор положения пучка согласно любому из вышеприведенных вариантов осуществления. В некоторых из этих вариантов осуществления источник ионов выполнен с возможностью генерировать ионы.
[125] В некоторых из этих вариантов осуществления нейтронно-пучковая система дополнительно включает в себя линию движения пучка, соединенную с выпускным отверстием тандемного ускорителя, и систему предварительного ускорителя, соединенную с впускным отверстием тандемного ускорителя.
[126] В некоторых из этих вариантов осуществления система предварительного ускорителя включает в себя одно или более из линзы Эйнцеля, трубки предварительного ускорителя, магнитных фокусирующих элементов или откачиваемой насосом камеры.
[127] В некоторых вариантах осуществления способ мониторинга положения пучка, продвигающегося через линию движения пучка, включает в себя измерение величины тока на одном или более отдельных электродов из множества электродов, расположенных внутри линии движения пучка по мере того, как пучок продвигается через линию движения пучка. В некоторых из этих вариантов осуществления каждый отдельный электрод из упомянутого множества электродов связан с одним или более пороговых значений тока.
[128] В некоторых из этих вариантов осуществления способ дополнительно включает в себя определение, находится ли пучок, продвигающийся через линию движения пучка, вне оси, посредством сравнения величины тока на одном или более из упомянутых одного или более отдельных электродов с одним или более пороговых значений тока.
[129] В некоторых из этих вариантов осуществления способ дополнительно включает в себя определение, находится ли пучок, продвигающийся через линию движения пучка, вне оси, посредством сравнения первой величины тока на первом электроде из упомянутого одного или более отдельных электродов с первым пороговым значением тока и второй величины тока на втором электроде из упомянутого одного или более отдельных электродов со вторым пороговым значением тока. В некоторых из этих вариантов осуществления первый электрод и второй электрод расположены смежно друг с другом.
[130] В некоторых из этих вариантов осуществления способ дополнительно включает в себя передачу сигнала в систему управления, что пучок находится вне оси, когда величина тока на одном или более из упомянутого одного или более отдельных электродов превышает либо ниже упомянутого одного или более пороговых значений тока.
[131] В некоторых из этих вариантов осуществления способ дополнительно включает в себя передачу сигнала в систему управления, что пучок находится вне оси, когда первая величина тока на первом электроде превышает или ниже первого порогового значения тока, и вторая величина тока на втором электроде превышает или ниже второго порогового значения тока.
[132] В некоторых из этих вариантов осуществления способ дополнительно включает в себя смещение упомянутого множества электродов с использованием внешнего источника питания. В некоторых из этих вариантов осуществления способ дополнительно включает в себя водяное охлаждение упомянутого множества электродов.
[133] В некоторых из этих вариантов осуществления каждый отдельный электрод из упомянутого множества электродов связан с расстоянием простирания электрода. В некоторых из этих вариантов осуществления расстояние простирания электрода представляет собой расстояние во внутреннюю часть компонента линии движения пучка, на которое простирается электрод.
[134] В некоторых из этих вариантов осуществления каждый отдельный электрод связан с уникальным заранее определенным пороговым током.
[135] В некоторых вариантах осуществления способ управления положением пучка, продвигающегося через линию движения пучка пучковой системы, включает в себя прием от монитора положения пучка одного или более сигналов и определение на основе упомянутого множества одного или более сигналов, находится ли пучок, продвигающийся через линию движения пучка, вне оси.
[136] В некоторых из этих вариантов осуществления монитор положения пучка включает в себя множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка.
[137] В некоторых из этих вариантов осуществления способ дополнительно включает в себя на основе упомянутого одного или более сигналов передачу инструкций, чтобы прерывать работу пучковой системы. В некоторых из этих вариантов осуществления способ дополнительно включает в себя на основе упомянутого одного или более сигналов передачу данных, представляющих упомянутые один или более сигналов, в вычислительное устройство. В некоторых из этих вариантов осуществления способ дополнительно включает в себя при определении того, что пучок находится вне требуемой оси, передачу сигналу регулирования в один или более компонентов линии движения пучка, чтобы регулировать положение пучка так, что он возвращается на требуемую ось.
[138] В некоторых из этих вариантов осуществления способ дополнительно включает в себя на основе упомянутого одного или более сигналов определение степени отклонения пучка от требуемой оси и передачу сигналов регулирования в один или более компонентов линии движения пучка, чтобы компенсировать степень отклонения пучка от требуемой оси.
[139] В некоторых из этих вариантов осуществления упомянутого один или более компонентов линии движения пучка содержат один или более магнитов управления пучком. В некоторых из этих вариантов осуществления сигналы регулирования регулируют положения упомянутых одного или более магнитов управления пучком.
[140] В некоторых из этих вариантов осуществления упомянутые один или более сигналов представляют измеренный ток посредством одного или более электродов из упомянутого множества электродов. В некоторых из этих вариантов осуществления упомянутые один или более сигналов представляют собой измеренный ток посредством одного или более электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное с упомянутым одним или более электродов. В некоторых из этих вариантов осуществления упомянутый один или более сигналов представляют собой измеренный ток посредством смежных электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное со смежными электродами.
[141] В некоторых из этих вариантов осуществления степень отклонения пучка количественно определяет то, насколько далеко от оси проходит пучок.
[142] В некоторых вариантах осуществления основанная на визуализации пучковая диагностическая система включает в себя два (2) или более компонентов визуализации, соединенных с и простирающихся во внутреннюю часть откачиваемой насосом камеры и ортогонально ориентированных к оси распространения пучка в откачиваемой насосом камере. В некоторых из этих вариантов осуществления откачиваемая насосом камера является располагаемой вдоль линии движения пучка. В некоторых из этих вариантов осуществления упомянутого два (2) или более компонентов визуализации выполнены с возможностью практически неинвазивно вести мониторинг пучка, продвигающегося через линию движения пучка, с помощью инжекции газа. В некоторых из этих вариантов осуществления основанная на визуализации пучковая диагностическая система выполнена с возможностью вести мониторинг параметров пучка для пучка, продвигающегося через линию движения пучка. В некоторых из этих вариантов осуществления параметры пучка содержат одно или более из размера, местоположения, наклона или профиля.
[143] В некоторых из этих вариантов осуществления основанная на визуализации пучковая диагностическая система дополнительно включает в себя порт для впрыска газа, простирающийся из откачиваемой насосом камеры и предоставляющий проход в откачиваемую насосом камеру. В некоторых из этих вариантов осуществления упомянутые два (2) или более компонентов визуализации включают в себя камеру, соединенную с линзой. В некоторых из этих вариантов осуществления одним или более из косвенного или непосредственного соединенного с линзой является оптическая трубка. В некоторых из этих вариантов осуществления конец оптической трубки, который является самым дальним от камеры, включает в себя апертуру, имеющую отверстие конкретной формы. В некоторых из этих вариантов осуществления апертура совпадает с камерой и выполнена с возможностью отсекать большую часть фонового света, который в противном случае может достигать датчика камеры. В некоторых из этих вариантов осуществления упомянутые два (2) или более компонентов визуализации дополнительно включают в себя интерференционный полосовой фильтр, расположенный между оптической трубкой и линзой.
[144] В некоторых из этих вариантов осуществления порт для впрыска газа приводится в действие газовым клапаном.
[145] В некоторых из этих вариантов осуществления упомянутые два (2) или более компонентов визуализации имеют регулируемое время экспозиции детектора. В некоторых из этих вариантов осуществления регулируемое время экспозиции детектора является регулируемым для обеспечения накопления максимально возможно большой части сигнала при поддержании наибольшего возможного отношения «сигнал-шум» (SNR).
[146] В некоторых из этих вариантов осуществления газовый клапан выполнен с возможностью управлять количеством впрыскиваемого газа и временем, когда количество газа впрыскивается а в откачиваемую насосом камеру. В некоторых из этих вариантов осуществления газовый клапан дополнительно выполнен с возможностью управлять местоположением газа, впрыскиваемого в откачиваемую насосом камеру, так что в поле обзора упомянутых двух (2) или более компонентов визуализации достигается равномерное распределение газа.
[147] В некоторых из этих вариантов осуществления камера включает в себя одно или более из временного разрешения, отношения «сигнал-шум» или размера. В некоторых из этих вариантов осуществления временное разрешение составляет 2 миллисекунды или меньше. В некоторых из этих вариантов осуществления отношение «сигнал-шум» превышает 40:1.
[148] В некоторых вариантах осуществления пучковая система включает в себя основанную на визуализации пучковую диагностическую систему, расположенную вдоль пучковой системы. В некоторых из этих вариантов осуществления основанная на визуализации пучковая диагностическая система выполнена с возможностью неинвазивно вести мониторинг пучка, продвигающегося через пучковую систему. В некоторых из этих вариантов осуществления пучковая система дополнительно включает в себя систему управления, выполненную с возможностью принимать один или более сигналов из основанной на визуализации диагностической системы.
[149] В некоторых из этих вариантов осуществления основанная на визуализации пучковая диагностическая система включает в себя основанную на визуализации пучковую диагностическую систему согласно любому из вышеприведенных вариантов осуществления.
[150] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления на основе упомянутых одного или более сигналов определять один или более параметров пучка, содержащих одно или более из размера, местоположения, наклона или профиля.
[151] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления на основе одного или более сигналов передавать управляющий сигнал в одно или более из газового клапана или одного или более компонентов визуализации основанной на визуализации пучковой диагностической системы.
[152] В некоторых из этих вариантов осуществления пучковая система дополнительно включает в себя низкоэнергетическую линию движения пучка (НЛДП). В некоторых из этих вариантов осуществления НЛДП включает в себя одно или более из источника отрицательных ионов, оптики пучка, системы предварительного ускорителя, пучковых диагностических средств или откачиваемой насосом камеры. В некоторых из этих вариантов осуществления пучковая система дополнительно включает в себя ускоритель ниже по ходу пучка от НЛДП. В некоторых из этих вариантов осуществления первая основанная на визуализации пучковая диагностическая система согласно любому из вышеприведенных вариантов осуществления расположена выше по ходу пучка от ускорителя. В некоторых из этих вариантов осуществления вторая основанная на визуализации пучковая диагностическая система согласно любому из вышеприведенных вариантов осуществления расположена ниже по ходу пучка от ускорителя.
[153] В некоторых вариантах осуществления нейтронно-пучковая система включает в себя систему предварительного ускорителя, выполненную с возможностью ускорять ионы из источника ионов, тандемный ускоритель, выполненный с возможностью ускорять ионы из системы предварительного ускорителя, и основанную на визуализации пучковую диагностическую систему согласно любому из вышеприведенных вариантов осуществления.
[154] В некоторых из этих вариантов осуществления нейтронно-пучковая система дополнительно включает в себя источник ионов, выполненный с возможностью генерировать ионы. В некоторых из этих вариантов осуществления нейтронно-пучковая система дополнительно включает в себя высокоэнергетическую линию движения пучка (ВЛДП), соединенную с выпускным отверстием тандемного ускорителя, и систему предварительного ускорителя, соединенную с впускным отверстием тандемного ускорителя. В некоторых из этих вариантов осуществления система предварительного ускорителя включает в себя одно или более из линзы Эйнцеля, трубки предварительного ускорителя, магнитных фокусирующих элементов или откачиваемой насосом камеры.
[155] В некоторых из этих вариантов осуществления нейтронно-пучковая система дополнительно включает в себя систему управления, выполненную с возможностью принимать один или более сигналов от основанной на визуализации пучковой диагностической системы.
[156] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления на основе упомянутого одного или более сигналов определять один или более параметров пучка, содержащих одно или более из размера, местоположения, наклона или профиля.
[157] В некоторых из этих вариантов осуществления система управления включает в себя по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления на основе одного или более сигналов передавать управляющий сигнал в одно или более из газового клапана или одного или более компонентов визуализации основанной на визуализации пучковой диагностической системы.
[158] В некоторых вариантах осуществления способ неинвазивного мониторинга параметров пучка, продвигающегося вдоль линии движения пучка, включает в себя впрыск газа в откачиваемую насосом камеру и измерение одного или более параметров пучка на основе люминесценции, получающейся в результате столкновений энергетических частиц пучка, продвигающегося через линию движения пучка.
[159] В некоторых из этих вариантов осуществления способ дополнительно включает в себя впрыск газа в откачиваемую насосом камеру, в то время как пучок продвигается через линию движения пучка.
[160] В некоторых из этих вариантов осуществления способ дополнительно включает в себя впрыск газа в откачиваемую насосом камеру вдоль линии движения пучка так, что нарушение пучка, продвигающегося через линию движения пучка, минимизируется.
[161] В некоторых из этих вариантов осуществления способ дополнительно включает в себя измерение одного или более параметров пучка так, что нарушение пучка, продвигающегося через линию движения пучка, минимизируется.
[162] В некоторых из этих вариантов осуществления способ дополнительно включает в себя впрыск газа в откачиваемую насосом камеру до импульса пучка, продвигающегося через линию движения пучка.
[163] В некоторых из этих вариантов осуществления упомянутый один или более параметров пучка включают в себя одно или более из поперечного размера (профиля) пучка или положения пучка.
[164] В некоторых из этих вариантов осуществления измерение включает в себя запись свечения люминесценции из области взаимодействия пучка и газа. В некоторых из этих вариантов осуществления запись свечения люминесценции включает в себя запись с использованием двух или более ортогонально ориентированных компонентов визуализации. В некоторых из этих вариантов осуществления способ дополнительно включает в себя задержку триггера для упомянутых двух или более ортогонально ориентированных компонентов визуализации относительно импульса пучка. В некоторых из этих вариантов осуществления триггер задерживают, чтобы приспособиться к одному или более из времени установления равновесия пучка или задержки флуоресцентного излучения.
[165] В некоторых из этих вариантов осуществления способ дополнительно включает в себя передачу одного или более параметров пучка в систему управления. В некоторых из этих вариантов осуществления упомянутый один или более параметров пучка включают в себя положение пучка, поперечный размер и наклон пучка. В некоторых из этих вариантов осуществления способ дополнительно включает в себя передачу упомянутого одного или более параметров пучка в систему управления в режиме реального времени.
[166] В некоторых из этих вариантов осуществления способ дополнительно включает в себя вычисление центроидов пучка вдоль распространения пучка и сравнение центроидов пучка с координатами оси линии движения пучка. В некоторых из этих вариантов осуществления способ дополнительно включает в себя получение координат оси линии движения пучка во время калибровки основанной на визуализации пучковой диагностической системы.
[167] В некоторых из этих вариантов осуществления способ дополнительно включает в себя измерение упомянутых одного или более параметров пучка для одного или более из перед лечением, во время лечения или после лечения.
[168] В некоторых из этих вариантов осуществления газ включает в себя одно или более из аргона или ксенона.
[169] Следует отметить, что все признаки, элементы, компоненты, функции и этапы, описанные относительно любого варианта осуществления, предоставленного в настоящем документе, имеют намерение быть свободно комбинируемыми и заменяемыми признаками, элементами, компонентами, функциями и этапами любого другого варианта осуществления. Если определенный признак, элемент, компонент, функция или этап описывается относительно только одного варианта осуществления, то следует понимать, что этот признак, элемент, компонент, функция или этап может использоваться с каждым другим вариантом осуществления, описанным в данном документе, если в явной форме не указано иное. В силу этого, этот параграф служит в качестве базовых сведений и письменного подтверждения для введения пунктов формулы изобретения, в любое время, которые комбинируют функции, элементы, компоненты, функции и этапы из различных вариантов осуществления либо которые заменяют признаки, элементы, компоненты, функции и этапы из одного варианта осуществления на признаки, элементы, компоненты, функции и этапы из другого, даже если нижеприведенное описание явно не утверждает, в конкретном примере, что такие комбинации или замены являются возможными. Следует явно принимать во внимание, что специальное перечисление каждой возможной комбинации и замены является излишне обременительным, в частности, при условии, что допустимость каждой такой комбинации и замены должна легко пониматься специалистами в данной области техники.
[170] В той степени, в которой варианты осуществления, раскрытые в данном документе, включают в себя или работают в связи с запоминающим устройством, устройством хранения данных и/или машиночитаемыми носителями, это запоминающее устройство, устройство хранения данных и/или машиночитаемые носители являются энергонезависимыми. Соответственно, в той степени, в которой запоминающее устройство, устройство хранения данных и/или машиночитаемые носители охватываются посредством одного или более пунктов формулы изобретения, это запоминающее устройство, устройство хранения данных и/или машиночитаемые носители являются только энергонезависимыми.
[171] Использовании в данном документе и в прилагаемой формуле изобретения упоминания элемента в единственном числе не исключает множества таких элементов, если контекст явно не предписывает иное.
[172] Хотя варианты осуществления допускают различные модификации и альтернативные формы, их конкретные примеры показаны на чертежах и подробно описаны в данном документе. Тем не менее, следует понимать, что эти варианты осуществления не должны ограничиваться конкретной раскрытой формой, но наоборот, эти варианты осуществления должны охватывать все модификации, эквиваленты и альтернативы, попадающие в пределы сущности раскрытия. Кроме того, любые признаки, функции, этапы или элементы вариантов осуществления могут излагаться или добавляться в формулу изобретения, как и отрицательные ограничения, которые задают изобретаемый объем формулы изобретения посредством признаков, функций, этапов или элементов, которые не находятся в пределах этого объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ, УСТРОЙСТВА И СПОСОБЫ ДЛЯ МОДУЛЯЦИИ ПУЧКА ИОНОВ | 2021 |
|
RU2834888C1 |
| ПУТИ ПУЧКА ИОНОВ НА ПОВЕРХНОСТЯХ МИШЕНИ ДЛЯ ГЕНЕРАЦИИ ПУЧКА НЕЙТРОНОВ | 2021 |
|
RU2841283C1 |
| СИСТЕМА ОБЛУЧЕНИЯ РАДИОАКТИВНЫМИ ЛУЧАМИ И СПОСОБ УПРАВЛЕНИЯ ЕЮ | 2021 |
|
RU2839902C2 |
| ЧОППЕР ПРОТОННОГО ПУЧКА | 2024 |
|
RU2837335C1 |
| ЭЛЕМЕНТ ДЛЯ ФОРМИРОВАНИЯ ПУЧКА, ПРИМЕНЯЕМЫЙ В НЕЙТРОНОЗАХВАТНОЙ ТЕРАПИИ | 2016 |
|
RU2682972C1 |
| СИСТЕМА РАДИАЦИОННОГО ОБЛУЧЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЕЮ | 2021 |
|
RU2820986C1 |
| Устройство для измерения фазового портрета мощного стационарного пучка | 2025 |
|
RU2839258C1 |
| ГЕНЕРАТОР НЕЙТРОННОГО ПУЧКА | 1996 |
|
RU2165132C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ПУЧКА НЕЙТРАЛЬНЫХ ЧАСТИЦ | 2014 |
|
RU2653581C2 |
| СИСТЕМА ОБЛУЧЕНИЯ РАДИОАКТИВНЫМ ИЗЛУЧЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ЕЮ | 2021 |
|
RU2840334C2 |
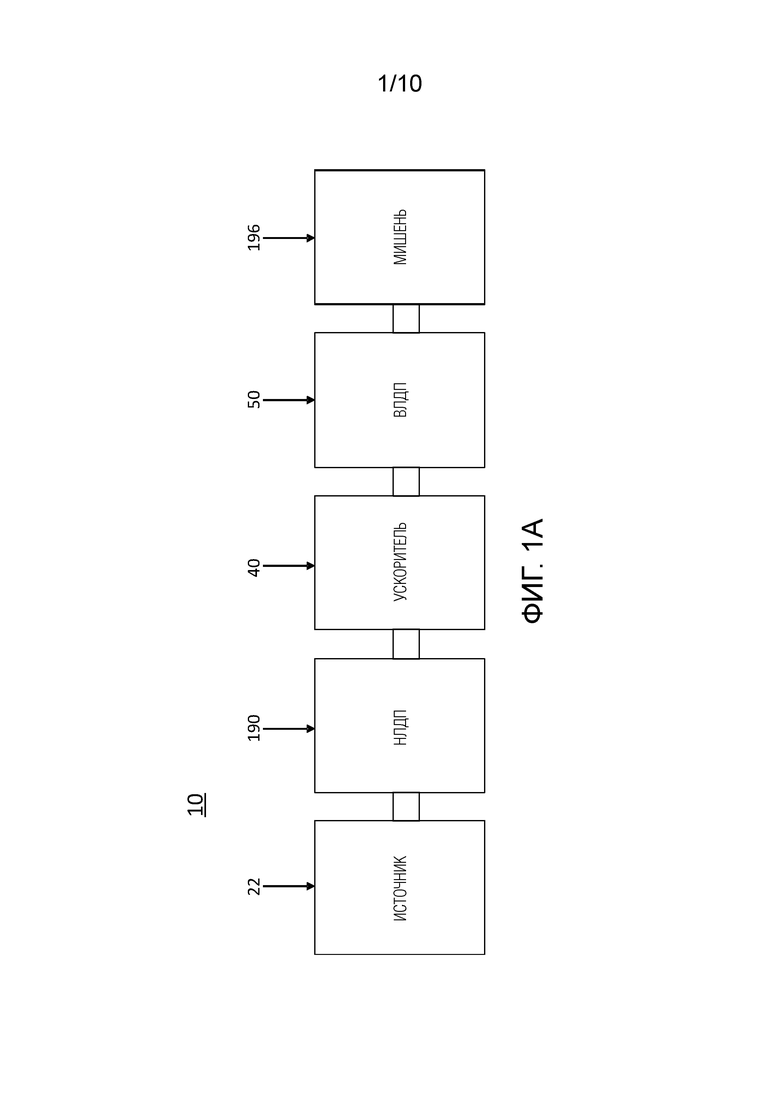
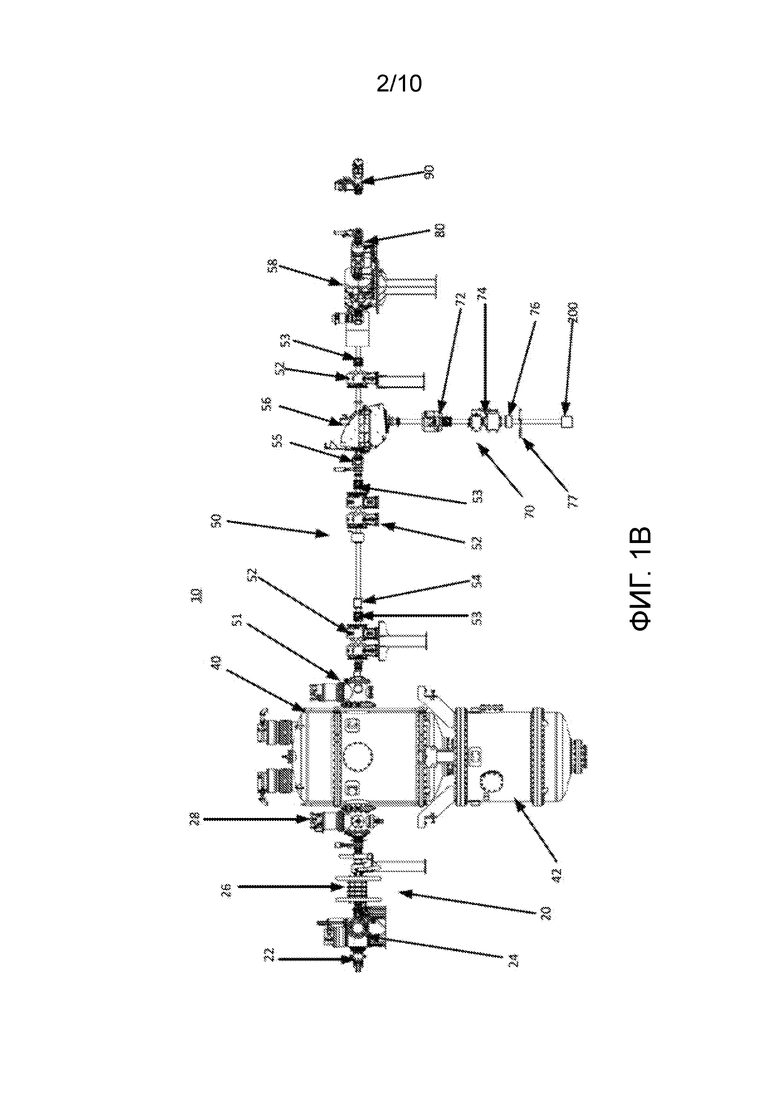
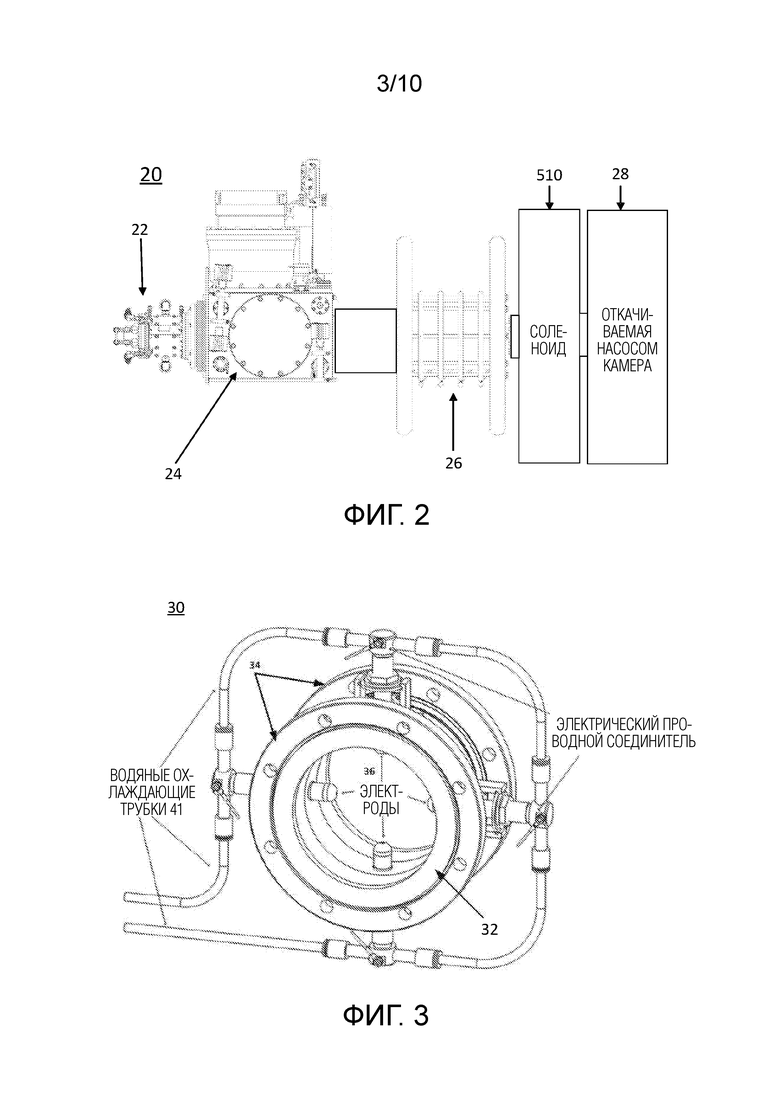
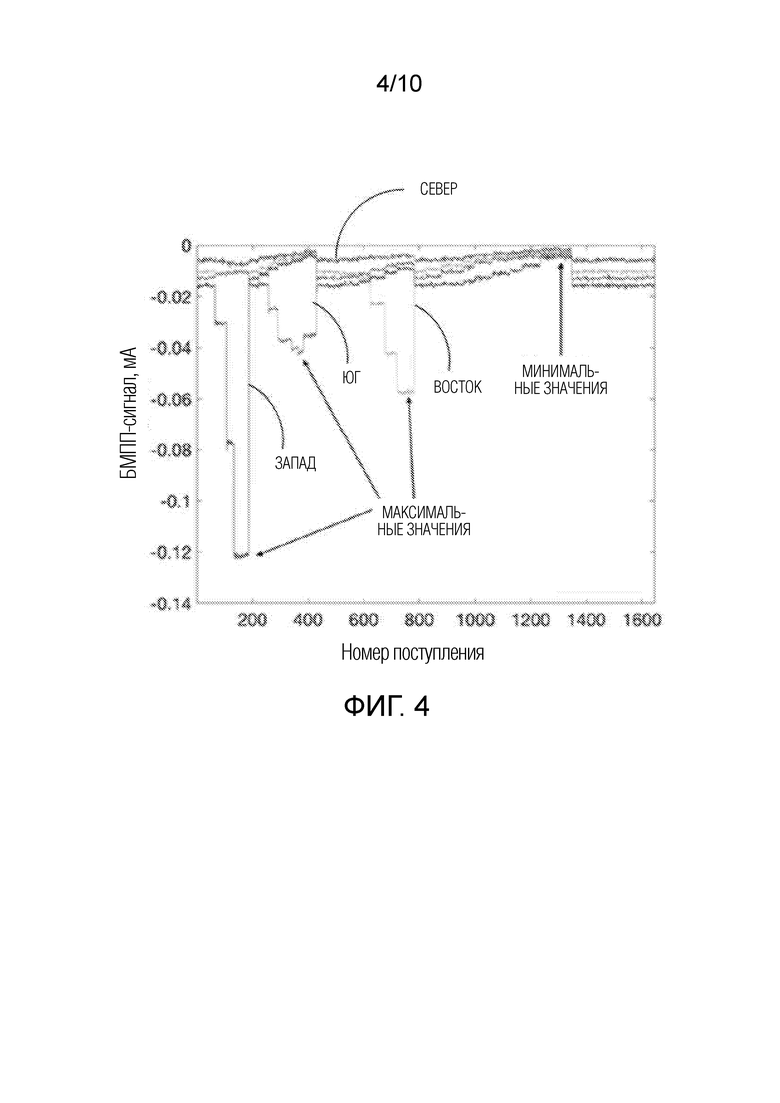
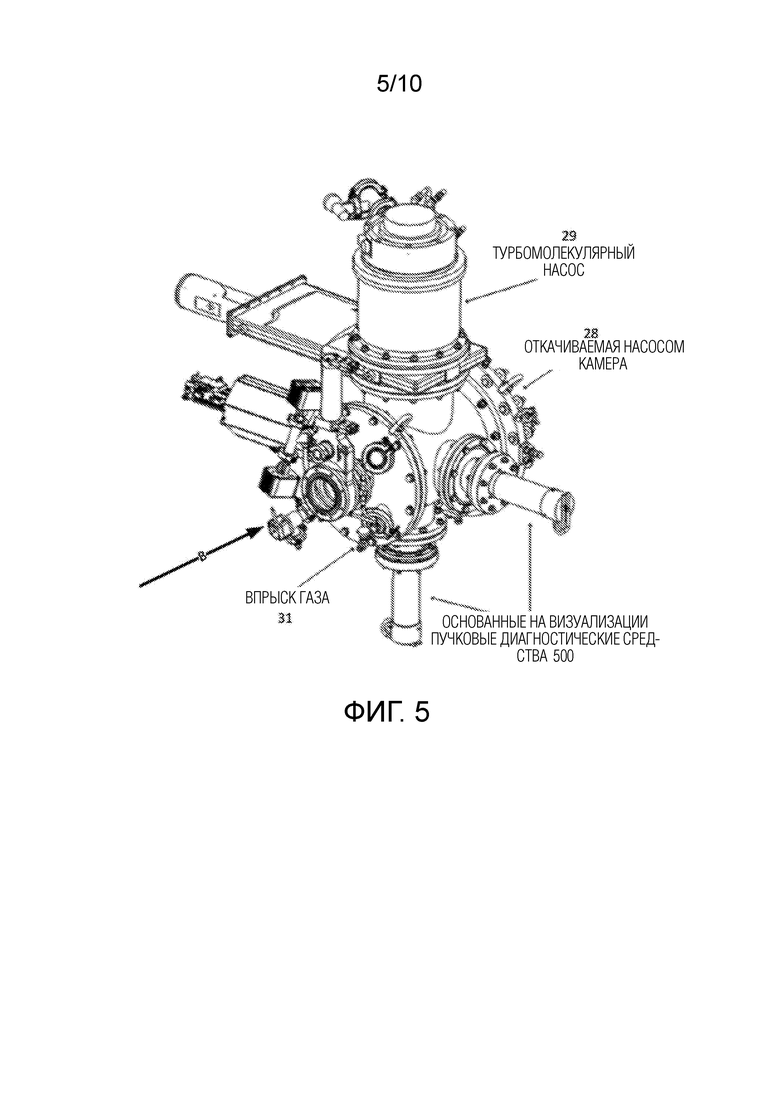
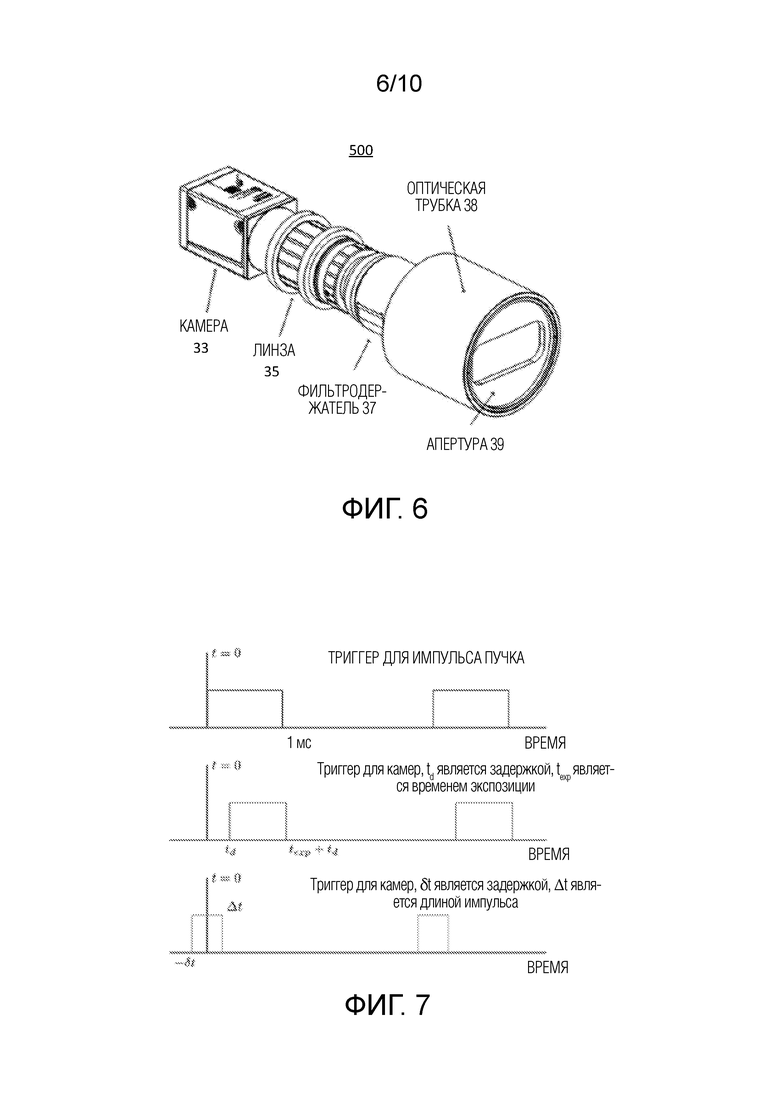
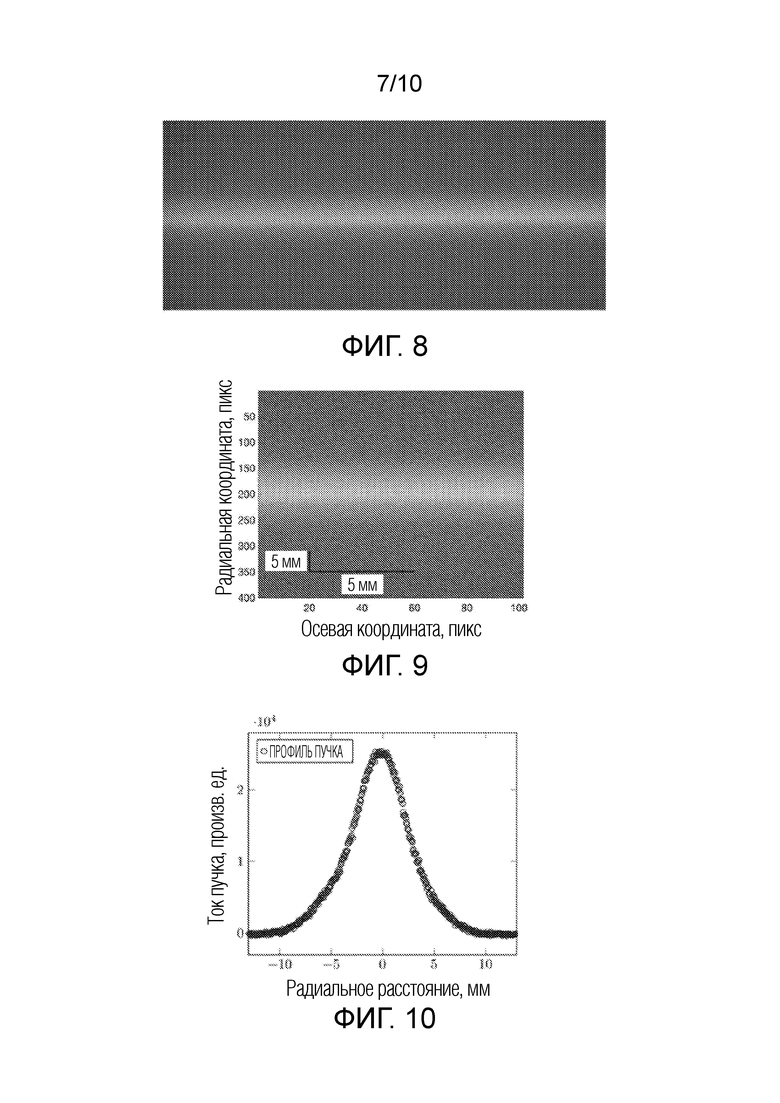
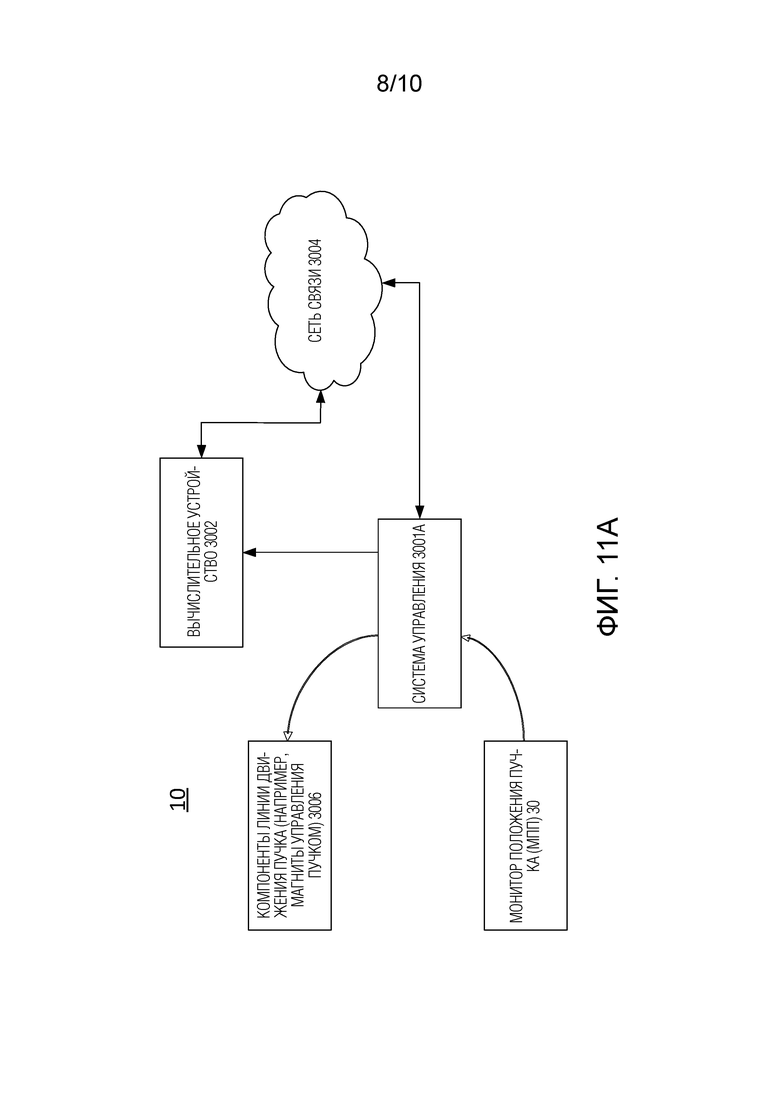
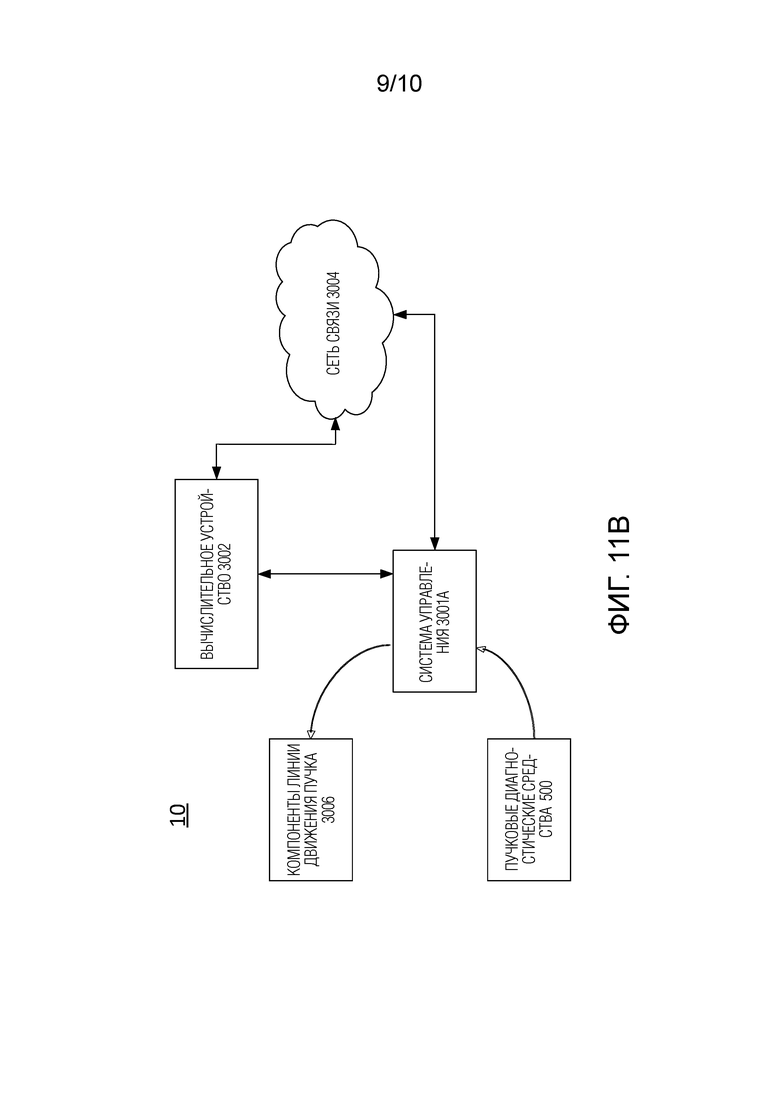
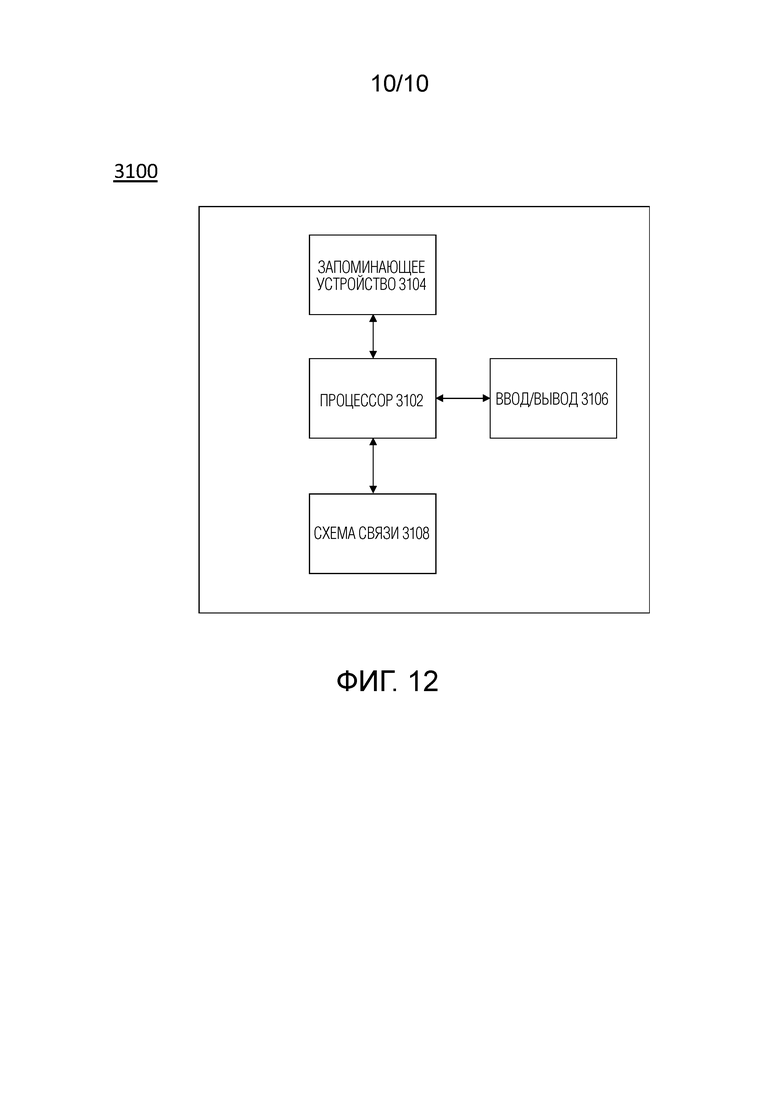
Группа изобретений относится к медицине. Варианты осуществления систем, устройств и способов относятся к быстрому мониторингу положения пучка для обнаружения неточного совмещения пучка в линии движения пучка. В примере быстрый монитор положения пучка включает в себя множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка. Быстрый монитор положения пучка выполнен с возможностью обнаруживать положение пучка, проходящего через компонент линии движения пучка, на основе гало-тока пучка. Варианты осуществления систем, устройств и способов дополнительно относятся к неинвазивному мониторингу параметров пучков, продвигающихся вдоль линии движения пучка. В примерах газ впрыскивается в откачиваемую насосом камеру вдоль линии движения пучка. Один или более параметров пучка измеряются по люминесценции, получающейся в результате столкновений энергетических частиц пучка, продвигающегося через линию движения пучка. Применение данной группы изобретений позволит облегчить проведение быстрого мониторинга положения пучка для обнаружения неточного совмещения пучка в линии движения пучка. 5 н. и 48 з.п. ф-лы, 12 ил.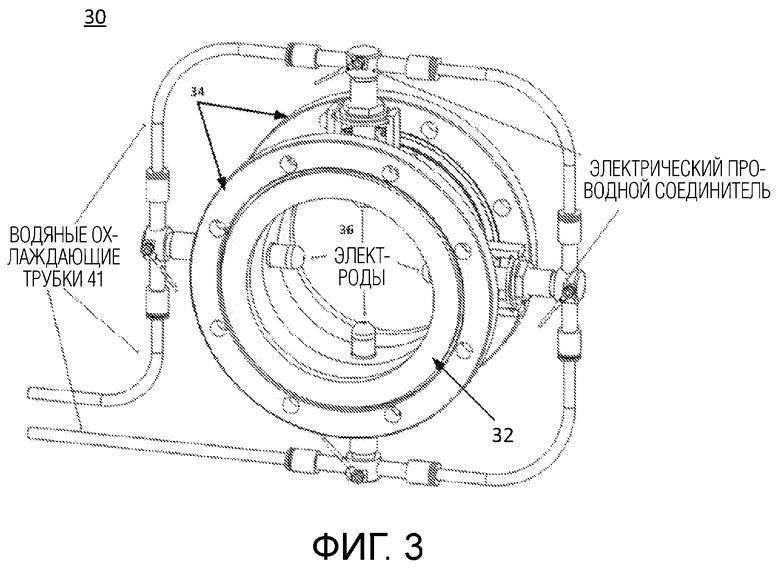
1. Монитор положения пучка, содержащий множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка, причем монитор положения пучка выполнен с возможностью обнаруживать положение пучка заряженных частиц, проходящего через компонент линии движения пучка, на основе гало-тока пучка заряженных частиц, причем каждый электрод из упомянутого множества электродов имеет удлиненную форму и продольную ось, причем продольная ось простирается во внутреннюю часть упомянутого компонента в направлении, перпендикулярном стенке монитора положения пучка в положении, где электрод соединен со стенкой.
2. Монитор положения пучка по п. 1, дополнительно содержащий охлаждающее устройство.
3. Монитор положения пучка по п. 1, причем каждый электрод из упомянутого множества электродов связан с пороговым значением тока.
4. Монитор положения пучка по п. 1, причем по меньшей мере один электрод из упомянутого множества электродов связан с пороговым значением тока, отличным от порогового значения тока для одного или более других электродов из упомянутого множества электродов.
5. Монитор положения пучка по п. 1, причем каждый электрод из упомянутого множества электродов связан с множеством пороговых значений тока.
6. Монитор положения пучка по п. 3 или 4, выполненный с возможностью передавать сигнал в систему управления, когда измеренный ток посредством одного или более электродов из упомянутого множества электродов превышает свое связанное пороговое значение тока.
7. Монитор положения пучка по п. 5, выполненный с возможностью передавать сигнал в систему управления, когда измеренный ток посредством смежных электродов из упомянутого множества электродов превышает нижнее пороговое значение из упомянутого множества пороговых значений тока, связанных с каждым электродом из смежных электродов.
8. Монитор положения пучка по п. 1, причем каждый электрод из упомянутого множества электродов связан с расстоянием простирания электрода.
9. Монитор положения пучка по п. 8, причем расстояние простирания электрода представляет собой расстояние во внутреннюю часть компонента, на которое простирается электрод.
10. Монитор положения пучка по п. 8 или 9, причем расстояние простирания каждого электрода является регулируемым.
11. Монитор положения пучка по п. 1, причем упомянутое множество электродов гальванически изолированы от стенки монитора положения пучка.
12. Монитор положения пучка по п. 1, причем упомянутое множество электродов выполнены смещаемыми посредством внешнего источника питания.
13. Монитор положения пучка по п. 1, выполненный с возможностью передавать сигнал в систему управления, когда пучок заряженных частиц, продвигающийся через линию движения пучка, находится вне оси.
14. Монитор положения пучка по п. 13, причем минимальная величина тока пучка для пучка заряженных частиц, проходящего через компонент линии движения пучка, уменьшается из-за упомянутого множества электродов.
15. Система управления пучком заряженных частиц, содержащая:
монитор положения пучка, выполненный с возможностью обнаруживать положение пучка заряженных частиц, проходящего через компонент линии движения пучка, на основе гало-тока пучка заряженных частиц, причем монитор положения пучка содержит множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка, причем каждый электрод из упомянутого множества электродов имеет удлиненную форму и продольную ось, причем продольная ось простирается во внутреннюю часть упомянутого компонента в направлении, перпендикулярном стенке монитора положения пучка в положении, где электрод соединен со стенкой; и
систему управления, выполненную с возможностью регулировать параметры линии движения пучка на основе положения пучка заряженных частиц.
16. Система по п. 15, причем система управления содержит по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления:
принимать один или более сигналов из монитора положения пучка; и
на основе упомянутого одного или более сигналов передавать инструкции, чтобы прерывать работу системы.
17. Система по п. 15, причем система управления содержит по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления:
принимать один или более сигналов от монитора положения пучка; и
на основе упомянутого одного или более сигналов передавать данные, представляющие упомянутые один или более сигналов, в вычислительное устройство.
18. Система по п. 15, причем система управления содержит по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления:
принимать один или более сигналов от монитора положения пучка;
на основе упомянутого одного или более сигналов определять то, что пучок заряженных частиц находится вне требуемой оси; и
передавать сигналы регулирования в один или более компонентов линии движения пучка, чтобы регулировать положение пучка заряженных частиц так, что он возвращается на требуемую ось.
19. Система по п. 15, причем система управления содержит по меньшей мере один процессор и по меньшей мере одно запоминающее устройство, сохраняющее инструкции, которые, будучи исполняемыми упомянутым по меньшей мере одним процессором, заставляют систему управления:
принимать один или более сигналов от монитора положения пучка;
на основе упомянутых одного или более сигналов определять степень отклонения пучка от требуемой оси; и
передавать сигналы регулирования в один или более компонентов линии движения пучка, чтобы компенсировать степень отклонения пучка от требуемой оси.
20. Система по любому из п. 18 или 19, причем упомянутые один или более компонентов линии движения пучка содержат один или более магнитов управления пучком.
21. Система по п. 20, причем сигналы регулирования регулируют положения упомянутых одного или более магнитов управления пучком.
22. Система по любому из пп. 16-21, причем упомянутые один или более сигналов представляют собой измеренный ток посредством одного или более электродов из упомянутого множества электродов.
23. Система по любому из пп. 16-21, причем упомянутые один или более сигналов представляют собой измеренный ток посредством упомянутых одного или более электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное с упомянутым одним или более электродов.
24. Система по любому из пп. 16-21, причем упомянутые один или более сигналов представляют собой измеренный ток посредством смежных электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное со смежными электродами.
25. Система по любому из пп. 15-24, причем монитор положения пучка содержит монитор положения пучка по любому из пп. 1-14.
26. Система по любому из пп. 15-25, дополнительно содержащая:
источник ионов, выполненный с возможностью генерировать ионы; и
тандемный ускоритель, выполненный с возможностью ускорять ионы, распространяемые из источника ионов;
причем один или более мониторов положения пучка расположены в одном или более из выше по ходу пучка от тандемного ускорителя или ниже по ходу пучка от тандемного ускорителя.
27. Пучковая система на заряженных частицах, содержащая:
систему предварительного ускорителя, выполненную с возможностью ускорять ионы из источника ионов;
тандемный ускоритель, выполненный с возможностью ускорять ионы из системы предварительного ускорителя; и
монитор положения пучка по любому из пп. 1-14.
28. Пучковая система по п. 27, причем источник ионов выполнен с возможностью генерировать ионы.
29. Пучковая система по п. 28, дополнительно содержащая линию движения пучка, соединенную с выпускным отверстием тандемного ускорителя, и систему предварительного ускорителя, соединенную с впускным отверстием тандемного ускорителя.
30. Пучковая система по п. 28, причем система предварительного ускорителя содержит одно или более из линзы Эйнцеля, трубки предварительного ускорителя, магнитных фокусирующих элементов или откачиваемой насосом камеры.
31. Способ мониторинга положения пучка заряженных частиц, продвигающегося через линию движения пучка, содержащий
измерение с использованием монитора положения пучка величины тока на одном или более отдельных электродов из множества электродов, расположенных внутри линии движения пучка, по мере того как пучок заряженных частиц продвигается через линию движения пучка, причем каждый электрод из упомянутого множества электродов имеет удлиненную форму и продольную ось, причем продольная ось простирается во внутреннюю часть компонента линии движения пучка в направлении, перпендикулярном стенке монитора положения пучка в положении, где электрод соединен со стенкой.
32. Способ по п. 31, причем каждый отдельный электрод из упомянутого множества электродов связан с одним или более пороговых значений тока.
33. Способ по п. 32, дополнительно содержащий
определение, находится ли пучок заряженных частиц, продвигающийся через линию движения пучка, вне оси, посредством сравнения величины тока на одном или более из упомянутых одного или более отдельных электродов с одним или более пороговых значений тока.
34. Способ по п. 32, дополнительно содержащий
определение, находится ли пучок заряженных частиц, продвигающийся через линию движения пучка, вне оси, посредством сравнения первой величины тока на первом электроде из упомянутого одного или более отдельных электродов с первым пороговым значением тока и второй величины тока на втором электроде из упомянутого одного или более отдельных электродов со вторым пороговым значением тока, при этом первый электрод и второй электрод расположены смежно друг с другом.
35. Способ по п. 33, дополнительно содержащий
передачу сигнала в систему управления, что пучок заряженных частиц находится вне оси, когда величина тока на одном или более из упомянутого одного или более отдельных электродов превышает либо ниже упомянутого одного или более пороговых значений тока.
36. Способ по п. 34, дополнительно содержащий
передачу сигнала в систему управления, что пучок заряженных частиц находится вне оси, когда первая величина тока на первом электроде превышает или ниже первого порогового значения тока и вторая величина тока на втором электроде превышает или ниже второго порогового значения тока.
37. Способ по п. 31, дополнительно содержащий
смещение упомянутого множества электродов с использованием внешнего источника питания.
38. Способ по п. 31, дополнительно содержащий
водяное охлаждение упомянутого множества электродов.
39. Способ по п. 31, причем каждый отдельный электрод из упомянутого множества электродов связан с расстоянием простирания электрода.
40. Способ по п. 38, причем расстояние простирания электрода представляет собой расстояние во внутреннюю часть компонента линии движения пучка, на которое простирается электрод.
41. Способ по п. 31, причем каждый отдельный электрод связан с уникальным заранее определенным пороговым током.
42. Способ управления положением пучка заряженных частиц, продвигающегося через линию движения пучка пучковой системы, содержащий:
прием от монитора положения пучка одного или более сигналов, причем монитор положения пучка содержит множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка, причем каждый электрод из упомянутого множества электродов имеет удлиненную форму и продольную ось, и причем продольная ось простирается во внутреннюю часть упомянутого компонента в направлении, перпендикулярном стенке монитора положения пучка в положении, где электрод соединен со стенкой; и
определение на основе упомянутого одного или более сигналов, находится ли пучок заряженных частиц, продвигающийся через линию движения пучка, вне оси.
43. Способ по п. 42, причем монитор положения пучка содержит множество электродов, простирающихся во внутреннюю часть компонента линии движения пучка.
44. Способ по п. 43, дополнительно содержащий
на основе упомянутых одного или более сигналов, передачу инструкций, чтобы прерывать работу пучковой системы.
45. Способ по п. 43, дополнительно содержащий
на основе упомянутых одного или более сигналов передачу данных, представляющих упомянутые один или более сигналов, в вычислительное устройство.
46. Способ по п. 43, дополнительно содержащий
при определении того, что пучок заряженных частиц находится вне требуемой оси, передачу сигналов регулирования в один или более компонентов линии движения пучка, чтобы регулировать положение пучка заряженных частиц так, что он возвращается на требуемую ось.
47. Способ по п. 43, дополнительно содержащий:
на основе упомянутых одного или более сигналов определение степени отклонения пучка от требуемой оси; и
передачу сигналов регулирования в один или более компонентов линии движения пучка, чтобы компенсировать степень отклонения пучка от требуемой оси.
48. Способ по любому из п. 46 или 47, причем упомянутые один или более компонентов линии движения пучка содержат один или более магнитов управления пучком.
49. Способ по п. 48, причем сигналы регулирования регулируют положение упомянутых одного или более магнитов управления пучком.
50. Способ по любому из пп. 43-49, причем упомянутые один или более сигналов представляют собой измеренный ток посредством одного или более электродов из упомянутого множества электродов.
51. Способ по любому из пп. 43-49, причем упомянутые один или более сигналов представляют собой измеренный ток посредством одного или более электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное с упомянутым одним или более электродов.
52. Способ по любому из пп. 43-49, причем упомянутый один или более сигналов представляют собой измеренный ток посредством смежных электродов из упомянутого множества электродов, превышающий пороговое значение тока, связанное со смежными электродами.
53. Способ по п. 49, причем степень отклонения пучка количественно определяет то, насколько далеко от оси проходит пучок заряженных частиц.
| US 20110186746 A1, 04.08.2011 | |||
| US 20070215459 A1, 20.09.2007 | |||
| WO 2018168713 A1, 20.09.2018 | |||
| US 20110058167 A1, 10.03.2011. |

