Изобретение относится к области транспортного машиностроения, в частности к трехколесным транспортным средствам с ассиметричным расположением колес, а именно для обеспечения условий доступности в перевозки пассажиров из числа инвалидов-колясочников.
Мотоцикл с боковой платформой для перевозки инвалидов колясочников представляет собой двухколесный мотоцикл повышенной устойчивости с передним управляемым и задним ведущим колесом, и боковой платформой для перевозки инвалидов-колясочников.
Конструкция мотоцикла с боковой платформой для перевозки инвалидов-колясочников обеспечивает беспрепятственный заезд по направляющим трапам на боковую платформу и съезд инвалидной коляски с боковой платформы, не меняя при этом направления движения инвалидной коляски, направляющие трапы при этом открываются и закрываются автоматически. Конструкция также включает в себя автоматический механизм наклона мотоцикла в заданной плоскости относительно боковой платформы и опорной поверхности с целью повышения устойчивости против бокового опрокидывания.
Известен мотоцикл с боковым прицепом для перевозки инвалидов-колясочников. Мотоцикл с боковым прицепом для перевозки инвалидов-колясочников образуется двухколесным мотоциклом с боковым прицепом и механизмом их соединения. Боковой прицеп опирается одной стороной на колесо. Механизм соединения включает шарниры и актуаторы. В качестве бокового прицепа установлена платформа для перевозки инвалидов-колясочников с фиксаторами и направляющими для заезда и съезда человека в инвалидной коляске. Достигается устранение необходимости пересадки инвалида в транспортное средство (RU 2668932).
Основными недостатками этого мотоцикла с боковым прицепом для перевозки инвалидов-колясочников, являются: отсутствие автоматизированных направляющих трапов для заезда и съезда человека в инвалидной коляске; расположение на боковом прицепе направляющих трапов для заезда и съезда человека в инвалидной коляске предусмотренных только с передней торцевой стороны бокового прицепа, т.е. заезд на боковой прицеп человека в инвалидной коляске предусмотрен задним ходом, а съезд передним ходом; отсутствие возможности без прямого участия водителя, автоматически наклонять мотоцикл относительно бокового прицепа.
Технической задачей изобретения является создание безопасного, устойчивого и относительно недорого транспортного средства для перевозки инвалидов-колясочников.
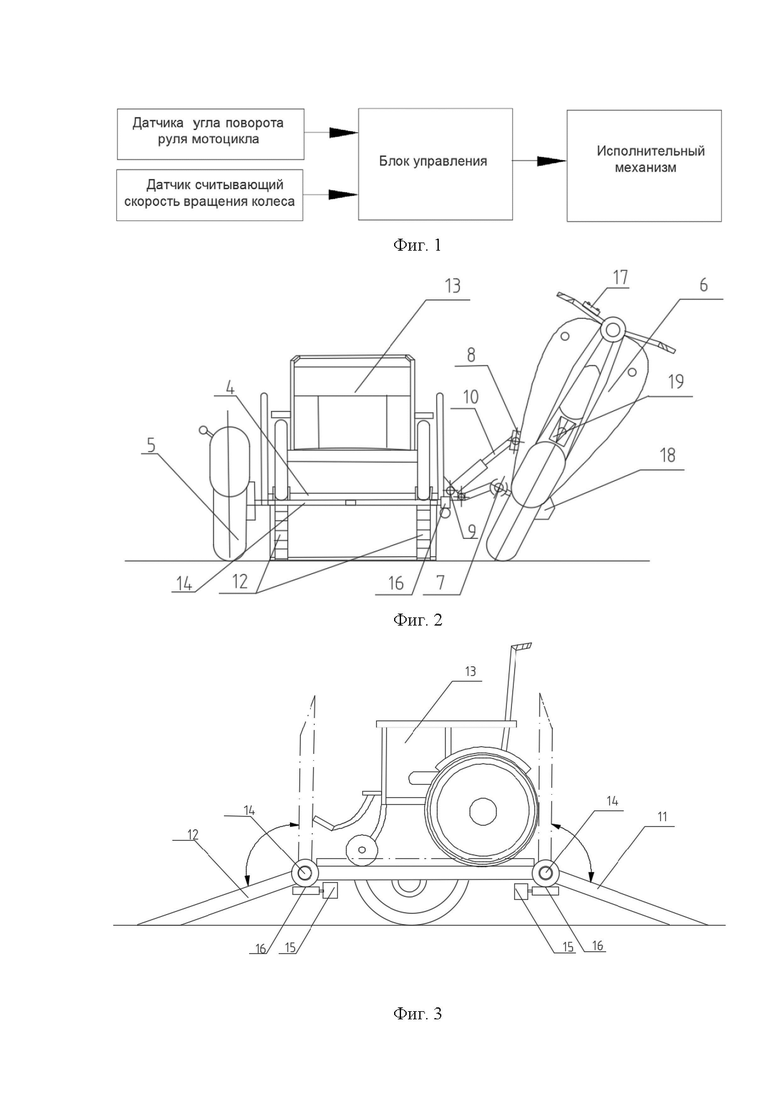
Технический результат достигается тем, что в мотоцикле с боковой платформой для перевозки инвалидов-колясочников с передним управляемым и задним ведущим колесом, а также одиночным колесом боковой платформы, контактирующим с опорной поверхностью, с возможностью наклона мотоцикла относительно боковой платформы, боковая платформа для перевозки инвалидов-колясочников включает в себя автоматизированные направляющие трапы по обе торцевые стороны боковой платформы для заезда и съезда инвалидной коляски не меняя направления движения, где открытие и закрытие направляющих трапов осуществляется автоматически через электродвигатель и червячный редуктор способный после отключения питания на электродвигатель, самостоятельно остановиться и удерживать направляющий трап в требуемом положении для фиксации инвалидной коляски, при этом автоматический механизм наклона мотоцикла состоит из электро-винтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны шарнирно неподвижной опорой с рамой боковой платформы, где наклон мотоцикла относительно боковой платформы осуществляется автоматически без участия водителя, при этом датчик угла поворота руля мотоцикла и датчик считывающий скорость вращения колеса посылают импульс в блок управления, который в свою очередь приводит в действие исполнительный механизм, наклоняя мотоцикл относительно боковой платформы в сторону центра поворота.
Согласно изобретению, в мотоцикле с передним управляемым и задним ведущим колесом, и боковой платформой для перевозки инвалидов-колясочников, контактирующей с опорной поверхностью одним колесом, боковая платформа для перевозки инвалидов-колясочников конструктивно выполнена таким образом, что включает в себя автоматизированные направляющие трапы по обе торцевые стороны боковой платформы. Съезд (или заезд) инвалида-колясочника с боковой платформы задним ходом является не безопасным, так как ограничивает видимость в направлении его движения, при этом доставляет определенные неудобства инвалиду-колясочнику во время движения задним ходом при заезде или съезде с боковой платформы. Сквозной заезд и съезд с боковой платформы исключает возможность ограниченной видимости при съезде (или заезде) с платформы, т.е. заезд на боковую платформу передним ходом и съезд с боковой платформы передним ходом, не изменяя направления движения инвалидной коляски, для инвалида-колясочника будет наиболее безопасным и удобным. Причем направляющие трапы для заезда и съезда с боковой платформы являются автоматизированными и жестко закреплены на цилиндрических валах. Цилиндрические валы приводятся во вращательное движение посредством электродвигателя через червячный редуктор, способный после отключения питания на электродвигатель, самостоятельно остановиться и удерживать направляющий трап в требуемом положении. Через сигнал, подающийся на пульт управления, электродвигатель включается и стремится вращать вал против хода часовой стрелки, при этом направляющий трап с задней торцовой стороны боковой платформы изменяет пространственное положение, наклоняясь в сторону открытия для возможности беспрепятственного заезда передним ходом инвалида-колясочника на боковую платформу. При вращении вала по ходу часовой стрелки, направляющий трап с задней торцовой стороны боковой платформы, стремится изменить пространственное положение и смещается в сторону закрытия. При необходимости съезда инвалида-колясочника с боковой платформы, подается сигнал на пульт управления для включения электродвигателя, последний стремится вращать вал, по ходу часовой стрелки, открывая направляющие траппы с передней торцовой стороны боковой платформы, для беспрепятственного съезда инвалида- колясочника передним ходом. Для исключения линейного смещения инвалидной коляски внутри боковой платформы и возможности оставаться инвалиду-колясочнику в устойчивом положении, внутренние стороны направляющих трапов при нахождении в транспортном положении даже при воздействии на них нагрузки, надежно фиксируют инвалидную коляску и исключают возможность самопроизвольного открытия, посредством динамического самоторможения механизма червячной пары.
Согласно изобретению, в мотоцикле с передним управляемым и задним ведущим колесом, и боковой платформой для перевозки инвалидов-колясочников, контактирующей с опорной поверхностью одним колесом, мотоцикл может автоматически без участия водителя, наклоняться как одно целое относительно боковой платформы и опорной поверхности. Механизм наклона состоит из электровинтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны шарнирно неподвижной опорой с несущей конструкцией боковой платформы. Управление механизмом наклона осуществляется автоматически в зависимости от критического радиуса поворота и критической скорости движения, при которых может произойти опрокидывание транспортного средства, при этом указанный технический результат достигается за счет установленного на мотоцикл датчика угла поворота рулевого колеса, датчика считывающего скорость вращения колеса и блока управления (фиг.1- принцип работы системы автоматического наклона мотоцикла с боковой платформой для перевозки инвалидов колясочников). Особую опасность представляет затраченное время с момента обнаружения водителем опасного поворота при прохождении криволинейного участка пути до начала принятия мер по включению механизма наклона мотоцикла относительно боковой платформы для избежания опрокидывания. Таким образом, реакция водителя может существенно замедлить быстродействие срабатывание механизма наклона, в связи с этим наиболее безопасным будет автоматическое управление механизмом наклона мотоцикла относительно боковой платформы.
При криволинейном движении мотоцикла с боковой платформой для перевозки инвалидов колясочников, возникает ускорение, которое направленно к центру поворота. Ускорение в свою очередь порождает центробежную силу инерции, приложенную к центру масс мотоцикла, и направленную в противоположную строну. Центробежная сила инерции при этом выступает как силовой фактор нарушающий устойчивость движения. В отличие от одноколейного двухколесного мотоцикла, мотоцикл с боковой платформой, не оснащенный механизмом автоматического наклона, не имеет функциональной возможности изменять пространственное положения относительно опорной поверхности, и наклоняться в сторону поворота, в связи с этим недостатком под действием центробежной силы инерции происходит перераспределение реакций между колесами мотоцикла и колесом боковой платформы, что способствует опрокидыванию транспортного средства.
При достижении критической скорости и критического радиуса поворота при движении мотоцикла с боковой платформой на криволинейных участках пути может наступить опрокидывание транспортного средства. В целях предотвращения аварийной ситуации, датчик угла поворота руля мотоцикла и датчик считывающий скорость вращения колеса, посылают импульс в блок управления, который формирует управляющий сигнал к исполнительному механизму (фиг. 1). В результате механизм наклона включается, наклоняя мотоцикл относительно боковой платформы в противоположную сторону действия центробежной силы инерции, т.е. в сторону поворота. Наклон мотоцикла в сторону поворота способствует смещению равнодействующей центра тяжести масс таким образом, что восстанавливающий момент превосходит по величине опрокидывающий момент, и как следствие повышает устойчивость против бокового опрокидывания. При чем, для повышения устойчивости против бокового опрокидывания в сторону поворота, мотоцикл вместе с водителем наклоняется, а боковая платформа с инвалидом-колясочником не изменяет своего пространственного положения, что кроме прочего дает возможность человеку, находящемуся в инвалидной коляске оставаться в устойчивом положении.
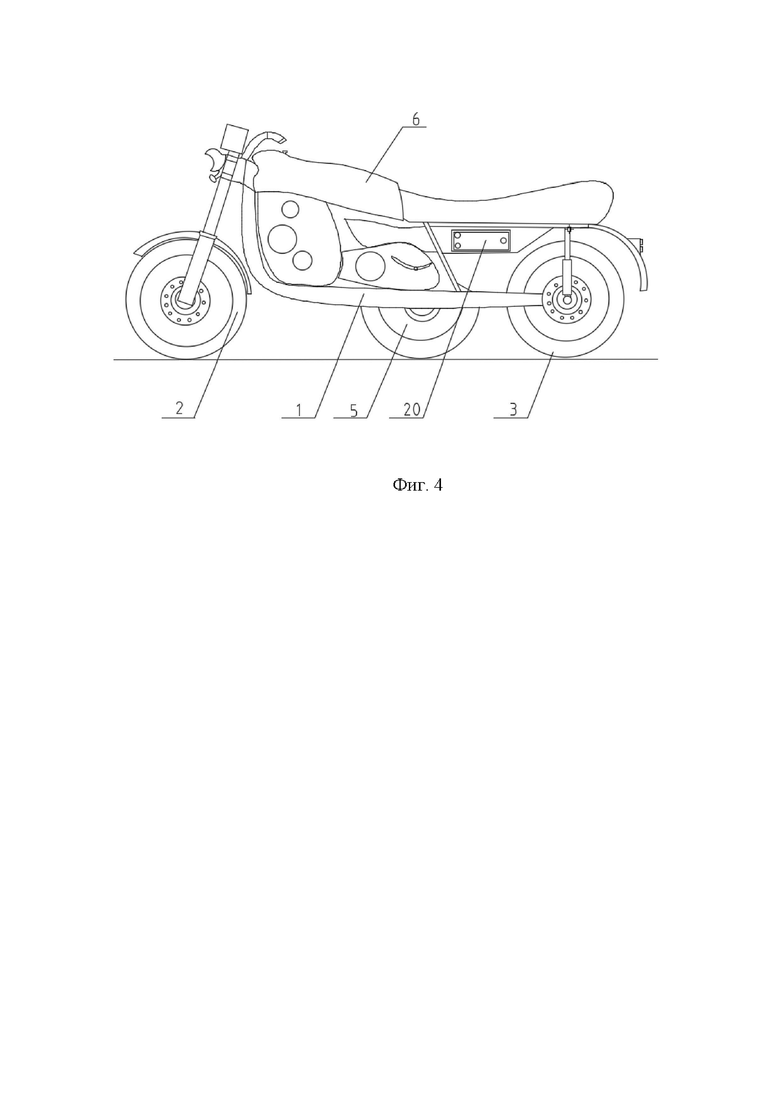
Сущность изобретения поясняется чертежами: на фиг.2- изображен мотоцикл с боковой платформой для перевозки инвалидов колясочников (вид спереди), на фиг. 3- боковая платформа для перевозки инвалидов колясочников (вид с боку), на фиг. 4- мотоцикл с боковой платформой для перевозки инвалидов - колясочников (вид с боку).
Мотоцикл с боковой платформой для перевозки инвалидов колясочников (фиг.2) содержит раму 1, связанные с ней переднее управляемое колесо 2, заднее ведущие колесо 3 и боковую платформу для перевозки инвалидов колясочников 4 с одним одиночным колесом 5, мотоцикл 6 может наклоняться относительно боковой платформы 4 благодаря шарнирам 7,8,9 связывающим боковую платформу 4 с рамой мотоцикла 1. Актуатор 10, являющийся механизмом наклона, связан с одной стороны с рамой мотоцикла 1 шарнирно неподвижной опорой 8, а с другой стороны шарнирно неподвижной опорой 9 с боковой платформой 4. Боковая платформа 4 содержит автоматизированные направляющие трапы 11,12 для заезда и съезда инвалидной коляски 13, направляющие трапы 11,12 жестко закреплены на цилиндрических валах 14, цилиндрические валы приводятся во вращательное движение посредством электродвигателей 15 через червячные редукторы 16.
Заезд инвалида-колясочника на боковую платформу 4 осуществляется следующим образом: через сигнал, подающийся на пульт управления 17 электродвигатель 15 через червячный редуктор 16 открывает для заезда инвалидной коляски 13 направляющие трап 11, после чего подается сигнал на пульт управления 17 для закрытия и дальнейшей фиксации направляющего трапа 11. При съезде инвалидной коляски 13 с боковой платформы 4, через сигнал, подающийся на пульт управления 17, направляющий трап для съезда 12 открывается и инвалид колясочник съезжает с боковой платформы 4, после чего подается сигнал на пульт управления 17 для закрытия и дальнейшей фиксации направляющего трапа 12.
Наклон мотоцикла 6 относительно боковой платформы 4 осуществляется следующим образом: при прохождении криволинейного участка пути и достижении критической скорости, и критического радиуса поворота по боковому опрокидыванию, датчик считывающий скорость вращения колеса 18 и датчик угла поворота руля мотоцикла 19 посылают импульс в блок управления 20 который формирует управляющий сигнал к исполнительному механизму 10. В результате механизм наклона 10 включается, наклоняя мотоцикл относительно боковой платформы в сторону центра поворота для исключения возможности бокового опрокидывания.
Мотоцикл с боковой платформой с возможностью автоматического наклона мотоцикла в сторону поворота, для перевозки инвалидов колясочников, конструктивно оснащенный автоматизированными направляющими трапами для заезда на боковую платформу и съезда с боковой платформы инвалидной коляски не меняя направления движения, обеспечит высоким уровнем доступности в перевозках маломобильных групп населения, без привлечения посторонней помощи, связанной с пересадкой инвалида-колясочника в транспортное средство.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОЦИКЛ С БОКОВЫМ ПРИЦЕПОМ ДЛЯ ПЕРЕВОЗКИ ИНВАЛИДОВ-КОЛЯСОЧНИКОВ | 2016 |
|
RU2668932C2 |
| Грузопассажирский электробус | 2023 |
|
RU2797075C1 |
| МИКРОАВТОМОБИЛЬ | 1998 |
|
RU2185990C2 |
| ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВКИ НА ЭСКАЛАТОРЕ ИНВАЛИДОВ В КРЕСЛЕ-КАТАЛКЕ | 2011 |
|
RU2481090C1 |
| Мотоцикл с боковым прицепом для горных склонов | 2023 |
|
RU2813592C1 |
| МОТОКОЛЯСКА | 2013 |
|
RU2562009C2 |
| КВАДРОЦИКЛ С ПЛАТФОРМОЙ (ВАРИАНТЫ) | 2020 |
|
RU2749206C1 |
| ЛИФТ ДЛЯ ИНВАЛИДА В КОЛЯСКЕ, САМОУСТАНАВЛИВАЮЩИЙСЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ | 2004 |
|
RU2287476C2 |
| Устройство для подъёма и спуска людей с ограниченными возможностями в ходьбе по лестничным маршам | 2020 |
|
RU2727984C1 |
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
Изобретение относится к области транспортного машиностроения, в частности к трехколесным транспортным средствам с асимметричным расположением колес, а именно для обеспечения условий доступности в перевозки пассажиров из числа инвалидов-колясочников. Мотоцикл с боковой платформой для перевозки инвалидов-колясочников с возможностью наклона мотоцикла относительно боковой платформы. Боковая платформа включает автоматизированные направляющие трапы по обе торцевые стороны боковой платформы для заезда и съезда инвалидной коляски, не меняя направления движения, где открытие и закрытие направляющих трапов осуществляется автоматически через электродвигатель и червячный редуктор, способный после отключения питания на электродвигатель самостоятельно остановиться и удерживать направляющий трап в требуемом положении для фиксации инвалидной коляски. Автоматический механизм наклона мотоцикла состоит из электровинтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны шарнирно неподвижной опорой с рамой боковой платформы, где наклон мотоцикла относительно боковой платформы осуществляется автоматически без участия водителя. Датчик угла поворота руля мотоцикла и датчик, считывающий скорость вращения колеса, посылают импульс в блок управления, который, в свою очередь, приводит в действие исполнительный механизм, наклоняя мотоцикл относительно боковой платформы в сторону центра поворота. Достигается безопасность, устойчивость транспортного средства для перевозки инвалидов-колясочников. 4 ил.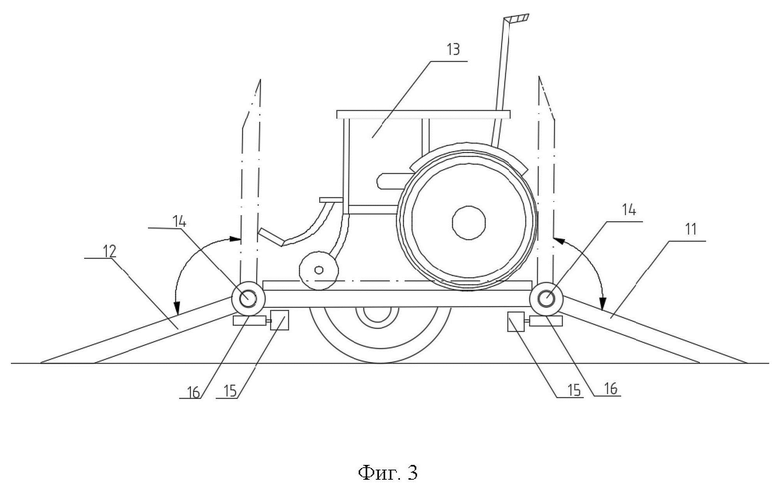
Мотоцикл с боковой платформой для перевозки инвалидов-колясочников с передним управляемым и задним ведущим колесом, а также одиночным колесом боковой платформы, контактирующим с опорной поверхностью, с возможностью наклона мотоцикла относительно боковой платформы отличающийся тем, что боковая платформа для перевозки инвалидов-колясочников включает в себя автоматизированные направляющие трапы по обе торцевые стороны боковой платформы для заезда и съезда инвалидной коляски, не меняя направления движения, где открытие и закрытие направляющих трапов осуществляется автоматически через электродвигатель и червячный редуктор, способный после отключения питания на электродвигатель самостоятельно остановиться и удерживать направляющий трап в требуемом положении для фиксации инвалидной коляски, при этом автоматический механизм наклона мотоцикла состоит из электровинтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны шарнирно неподвижной опорой с рамой боковой платформы, где наклон мотоцикла относительно боковой платформы осуществляется автоматически без участия водителя, при этом датчик угла поворота руля мотоцикла и датчик, считывающий скорость вращения колеса, посылают импульс в блок управления, который, в свою очередь, приводит в действие исполнительный механизм, наклоняя мотоцикл относительно боковой платформы в сторону центра поворота.
| МОТОЦИКЛ С БОКОВЫМ ПРИЦЕПОМ ДЛЯ ПЕРЕВОЗКИ ИНВАЛИДОВ-КОЛЯСОЧНИКОВ | 2016 |
|
RU2668932C2 |
| US 10143604 B2, 04.12.2018 | |||
| DE 112017007358 B4, 19.01.2023 | |||
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА В КОЛЯСКЕ | 2006 |
|
RU2314226C1 |

