Изобретение относится к области транспортного машиностроения, в частности к трехколесным транспортным средствам применяемых в горных условиях эксплуатации, и может быть использовано при проектировании мотоциклов с боковым прицепом.
Известен мотоцикл с коляской, образуемый двухколесным мотоциклом и боковым прицепом, опирающимся правой стороной на одно колесо, и механизмом их соединения, включающим цанговые зажимы и шаровые кронштейны, отличающийся тем, что между мотоциклом и коляской на шаровые кронштейны установлено шарнирное соединение, а к раме мотоцикла и раме коляски прикреплен винтовой механизм с электрическим приводом, наклоняющий мотоцикл относительно коляски и дорожного полотна, при этом пульт управления механизма наклона мотоцикла находится на руле мотоцикла (RU 2549046).
Основными недостаткам этого мотоцикла с коляской является не возможность без прямого участия водителя, автоматически наклонять мотоцикл относительно коляски.
Технической задачей изобретения является создания безопасного, надежного, простого и дешёвого транспортного средства, приспособленного к горным условиям эксплуатации, обладающим повышенной устойчивостью против бокового опрокидывания.
Технический результат достигается тем, что в мотоцикле с боковым прицепом для горных склонов с передним управляемым и задним ведущим колесом, а также одиночным колесом бокового прицепа, контактирующим с опорной поверхностью с возможностью наклона мотоцикла относительно бокового прицепа в перпендикулярной, относительно направления движения плоскости, отличающегося тем, что исполнительный механизм автоматического наклона мотоцикла состоит из электро-винтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны шарнирно неподвижной опорой с несущей конструкцией бокового прицепа, где управление механизмом наклона мотоцикла относительно бокового прицепа осуществляется автоматически без участия водителя в зависимости от угла наклона косогора, а постоянный контроль вертикального положения мотоцикла осуществляется установленным на мотоцикле маятниковым датчиком крена и блоком управления, посылающим управляющий сигнал исполнительному механизму, при этом автоматическая система стабилизации мотоцикла относительно бокового прицепа включается принудительно и используется при необходимости в зависимости от городского или горного режима эксплуатации.
Сущность предлагаемого изобретения заключается в следующем.
Мотоцикл с боковым прицепом представляет собой двухколесный мотоцикл с передним управляемым и задним ведущим колесом, и боковым прицепом, контактирующим с опорной поверхностью одним колесом.
Конструкция мотоцикла с боковым прицепом позволяет наклоняться мотоциклу относительно бокового прицепа и опорной поверхности в перпендикулярной, относительно направления движения плоскости.
Наклон мотоцикла в перпендикулярной, относительно направления движения плоскости реализуется посредством внедрения в конструкцию автоматического винтового механизма наклона.
Механизм наклона мотоцикла состоит из электро-винтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны шарнирно неподвижной опорой с несущей конструкцией бокового прицепа. Конструкция с автоматическим наклоном мотоцикла относительно бокового прицепа в перпендикулярной, относительно направления движения плоскости, расширит функциональные возможности, существенно увеличивая показатели устойчивости при выполнении транспортной работы, в горных условиях эксплуатации.
Согласно изобретению мотоцикл может автоматически, без участия водителя, наклонятся как одно целое относительно бокового прицепа и опорной поверхности в перпендикулярной, относительно направления движения плоскости, причем механизм наклона мотоцикла представляет собой автоматический механизм с принудительным подключением или отключением в зависимости от условий эксплуатацию.
При движении мотоцикла в поперечном направлении горного склона, мотоцикл отклонен от вертикали, на это реагирует маятниковый датчик крена, установленный на мотоцикле, который в свою очередь осуществляет постоянный контроль положения мотоцикла относительно бокового прицепа и опорной поверхности и посылает импульс в блок управления, который формирует управляющий сигнал исполнительному механизму. В результате механизм наклона включается, наклоняя мотоцикл относительно бокового прицепа, и стремится поддерживать мотоцикл в вертикальном положении, с целью увеличения устойчивости против бокового опрокидывания, осуществляя следующий принцип работы системы наклона мотоцикла с прицепом:

Одним из важных параметров, от которого напрямую зависит поперечная устойчивость мотоцикла с боковым прицепом при движении по горному склону, является положение центра тяжести масс относительно точек контакта колесной машины с опорной поверхностью. Исследуя основные геометрические параметры мотоцикла с боковым прицепом, можно отметить следующие наиболее важные параметры, оказывающие влияние на стабилизацию или дестабилизацию устойчивости, это колесная колея и координаты расположения геометрической точки приложения равнодействующей центра тяжести масс. При этом необходимо отметить, что технически грамотное изменение этих параметров может существенно увеличить показатели устойчивости мотоцикла с боковым прицепом при выполнении транспортных работ на горных склонах.
Наиболее выгодным изменением положения центра тяжести масс мотоцикла с боковым прицепом будет смещение его центра в поперечной плоскости в противоположную сторону от действия боковой составляющей силы тяжести, дестабилизирующую устойчивость, т.е. в сторону возвышенности склона.
Смещение центра тяжести масс мотоцикла с боковым прицепом в сторону возвышенности склона, позволит равнодействующей центра тяжести масс находиться в площади опоры, т.е. мотоцикл будет устойчив к опрокидыванию на склоне.
Достичь, такое изменение параметров, возможно применив автоматический механизм наклона мотоцикла относительно бокового прицепа и опорной поверхности. Так как движения мотоцикла с боковым прицепом при движении по пересечённой местности горных склонов, требует особо предельного внимания от водителя, необходима система, которая автоматически осуществляет постоянный контроль положения мотоцикла относительно опорной поверхности и, учтивая критический угол опорной поверхности по боковому опрокидыванию, наклоняет мотоцикл на необходимый угол в заданной поперечной плоскости относительно бокового прицепа с сохранением вертикальности, повышая при этом устойчивость против бокового опрокидывания.
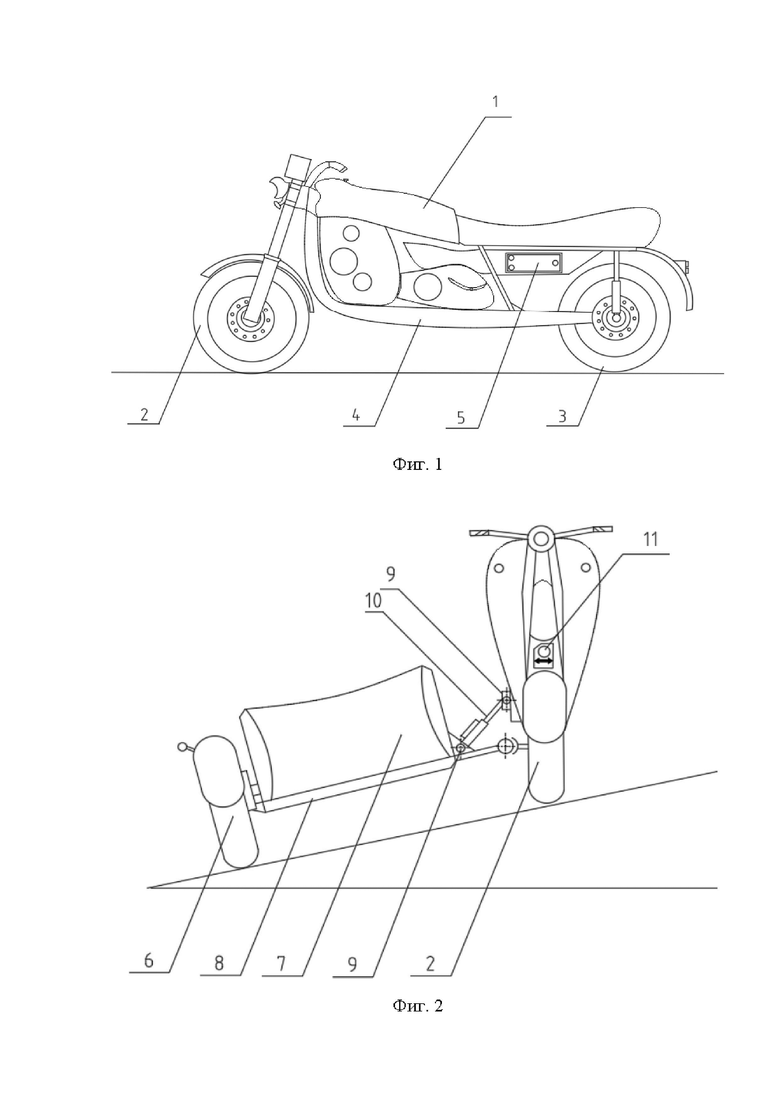
Сущность изобретения поясняется чертежами, где на фиг.1 изображена схема наклоняющегося мотоцикла с боковым прицепом, вид сбоку, на фиг.2- то же, вид сзади.
Мотоцикл 1 содержит переднее управляемое колесо 2 и заднее ведущее колесо 3, раму мотоцикла 4 , блок управления 5, одно одиночное колесо 6, связанное с боковым прицепом 7 , несущую конструкции бокового прицепа 8, шарниры 9, связывающие посредством электро-винтового линейного актуатора несущую конструкцию бокового прицепа 8 с мотоциклом 1, исполнительный механизм автоматического наклона электро-винтовой линейный актуатор 10, маятниковый датчик крена 11.
Мотоцикл с боковым прицепом для горных склонов движется следующим образом. При движении мотоцикла с боковым прицепом в поперечном направлении горного склона изменения положения мотоцикла осуществляются следующим образом. На отклоненный от вертикали мотоцикл 1 реагирует маятниковый датчик крена 11, осуществляющий постоянный контроль положения мотоцикла относительно опорной поверхности, посылая в свою очередь импульс в блок управления 5, который формирует управляющий сигнал исполнительному механизму автоматического наклона 10. В результате исполнительный механизм автоматического наклона 10 включается и стремится поддерживать в постоянном вертикальном положении мотоцикл относительно бокового прицепа и опорной поверхности, обеспечивая повышение боковой устойчивости и исключение возможности бокового опрокидывания на склоне, что соответственно позволит повысить безопасность езды.
Конструктивное внедрение исполнительного механизма автоматического наклона мотоцикла относительно бокового прицепа и опорной поверхности, без вмешательства водителя, дает возможность изменять направления вектора центра тяжести масс и позволит мотоциклу с боковым прицепом повысить устойчивость против бокового опрокидывания при движении по крутым косогорам, что расширит его возможности эксплуатации в горных условиях, и повысит безопасность движения, способствующую сохранению жизни людей.
Шарнирное соединение рамы мотоцикла посредством электро-винтового линейного актуатора в качестве основного исполнительного механизма автоматического наклона с несущей конструкцией бокового прицепа, позволяет наиболее просто изменять их взаиморасположение и механизировать процесс наклона с наименьшими затратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мотоцикл с боковой платформой для перевозки инвалидов-колясочников | 2024 |
|
RU2831856C1 |
| МОТОЦИКЛ С КОЛЯСКОЙ | 2013 |
|
RU2549046C2 |
| МОТОЦИКЛ С БОКОВЫМ ПРИЦЕПОМ ДЛЯ ПЕРЕВОЗКИ ИНВАЛИДОВ-КОЛЯСОЧНИКОВ | 2016 |
|
RU2668932C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2433935C2 |
| Горный колесный трактор | 1973 |
|
SU722785A1 |
| Тракторная тележка для транспортировки грузов по склонам | 1983 |
|
SU1156928A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОСТОВА | 1991 |
|
RU2093371C1 |
| Крутосклонное транспортное средство | 1975 |
|
SU633754A1 |
Изобретение относится к области транспортного машиностроения, в частности к трехколесным транспортным средствам, применяемым в горных условиях эксплуатации, и может быть использовано при проектировании мотоциклов с боковым прицепом. Мотоцикл с боковым прицепом для горных склонов снабжен исполнительным механизмом автоматического наклона мотоцикла, состоящим из электро-винтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны - шарнирно неподвижной опорой с несущей конструкцией бокового прицепа. Управление механизмом наклона мотоцикла относительно бокового прицепа осуществляется автоматически без участия водителя в зависимости от угла наклона косогора, а постоянный контроль вертикального положения мотоцикла осуществляется установленным на мотоцикле маятниковым датчиком крена и блоком управления, посылающим управляющий сигнал исполнительному механизму. Автоматическая система стабилизации мотоцикла относительно бокового прицепа включается принудительно и используется при необходимости в зависимости от городского или горного режима эксплуатации. Конструкция мотоцикла с боковым прицепом позволяет наклоняться мотоциклу относительно бокового прицепа и опорной поверхности в перпендикулярной относительно направления движения плоскости.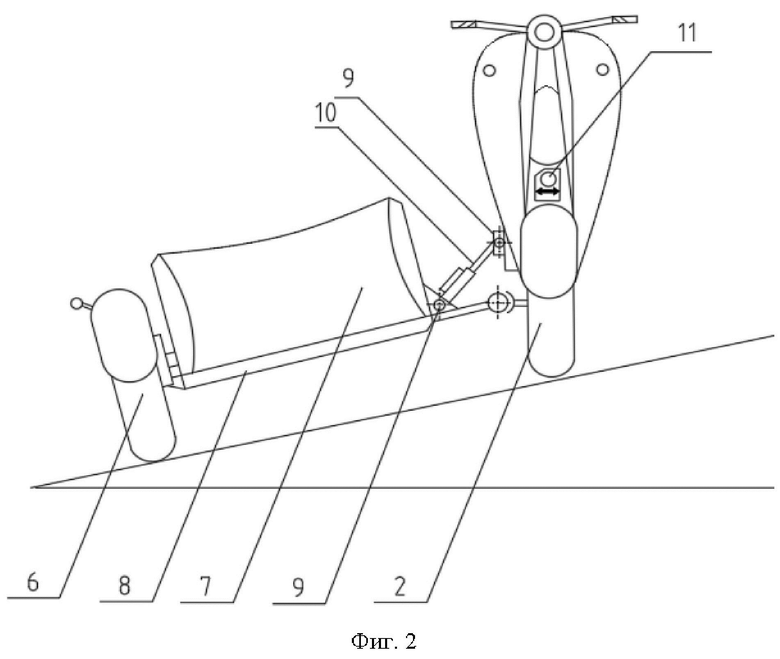
Мотоцикл с боковым прицепом для горных склонов с передним управляемым и задним ведущим колесом, а также одиночным колесом бокового прицепа, контактирующим с опорной поверхностью с возможностью наклона мотоцикла относительно бокового прицепа в перпендикулярной относительно направления движения плоскости, отличающийся тем, что исполнительный механизм автоматического наклона мотоцикла состоит из электро-винтового линейного актуатора, связанного с одной стороны шарнирно неподвижной опорой с рамой мотоцикла, с другой стороны - шарнирно неподвижной опорой с несущей конструкцией бокового прицепа, где управление механизмом наклона мотоцикла относительно бокового прицепа осуществляется автоматически без участия водителя в зависимости от угла наклона косогора, а постоянный контроль вертикального положения мотоцикла осуществляется установленным на мотоцикле маятниковым датчиком крена и блоком управления, посылающим управляющий сигнал исполнительному механизму, при этом автоматическая система стабилизации мотоцикла относительно бокового прицепа включается принудительно и используется при необходимости в зависимости от городского или горного режима эксплуатации.
| МОТОЦИКЛ С КОЛЯСКОЙ | 2013 |
|
RU2549046C2 |
| МОТОЦИКЛ С БОКОВЫМ ПРИЦЕПОМ ДЛЯ ПЕРЕВОЗКИ ИНВАЛИДОВ-КОЛЯСОЧНИКОВ | 2016 |
|
RU2668932C2 |
| ВСЕСОЮЗНАЯ IflATEJiTHO-lTSi'r:!' ЩБИБЛИОТ!^:КА I | 0 |
|
SU352132A1 |
