Область техники, к которой относится изобретение
Техническое решение относится к области космической техники, конкретно к космическим платформам (КП) для создания космических аппаратов микро-класса, разработанных в соответствии со стандартом CubeSat и применяемых для целей дистанционного зондирования Земли (ДЗЗ).
Уровень техники
В настоящий момент рынок ДЗЗ смещается в сторону увеличения следующих количественных показателей качества космических систем:
- Повышение спектральной разрешающей способности спутников.
- Повышение пространственной разрешающей способности спутников.
- Повышения регулярности съемки заданного региона земной поверхности.
При этом, учитывая степень миниатюризации и производительности микроэлектроники, явно наметился тренд к изменению следующих характеристик КА:
- Повышение скорости передачи продуктов съемки Земли на наземные пункты приема целевой информации.
- Снижение общей массы и габарита КА и массы ОЭС.
- Снижение стоимости изготовления и запуска КА.
Стоит отметить, что одним из основных недостатков современных систем ДЗЗ является высокая стоимость разработки и запуска каждого космического аппарата и, как следствие, экономические ограничения при создании крупной группировки, что в свою очередь снижает оперативность съемки. Поэтому одна из основных тенденций создания систем ДЗЗ-использование низкобюджетных космических аппаратов малого и микро класса.
Из уровня техники известна космическая платформа, которая содержит несущий корпус в виде параллелепипеда, снабженный откидными модулями, связанными с несущим корпусом разъемными шарнирными узлами, поворотные солнечные батареи, установленные на несущем корпусе с помощью электроприводов, приборы служебных систем, размещенные внутри несущего корпуса, элементы крепления полезной нагрузки и узлы соединения несущего корпуса с системой отделения. Откидные модули снабжены механизмами поворота и узлами фиксации откидных модулей к несущему корпусу. Внутри откидных модулей размещены элементы крепления полезной нагрузки. На откидных модулях установлены дополнительные солнечные батареи (патент RU 2410294, B64G 1/10 30.12.2008 г).
К недостаткам данной космической платформы можно отнести тот факт, что откидные модули непригодны для размещения в них полезной нагрузки ДЗЗ с большой апертурой входного зрачка, кроме этого при раскрытии откидных модулей точность ориентации и стабилизации космической платформы будет значительно снижаться, что будет негативно сказываться (вплоть до полного отсутствия такой возможности) на качестве проведения космической съемки земной поверхности. Кроме этого, наличие на космической платформе выступающих элементов не позволяет осуществлять ее запуск в составе транспортно-пускового контейнера (ТПК), который может снижать ударные нагрузки на оптико-электронную систему (ОЭС) космического аппарат при его отделении.
Также, известна космическая платформа ДЗЗ, которая может быть использована при создании малых космических аппаратов дистанционного зондирования с массой 100-500 кг для работы на низких околоземных орбитах (патент на полезную модель №: 132422). Особенность данной космической платформы состоит в том, что корпус выполнен из соединенных между собой самонесущих термостабилизированных сотопанелей со встроенными каркасами и тепловыми трубами; панели солнечной батареи (СБ) выполнены с возможностью раскладывания крайних створок перпендикулярно относительно направления раскладывания корневых частей крыльев СБ; узлы и приборы служебных бортовых систем, стойкие к радиационному и ультрафиолетовому облучению, установлены на наружных поверхностях корпуса, снабженному двигательной установкой, переходным элементом и элементом крепления модуля полезной нагрузки.
К недостаткам данной космической платформы можно отнести ее высокую массу, которая может достигать от 100 до 500 кг, и громоздкость, что приведет к увеличению срока изготовления и наземной экспериментальной отработки КА, что повлечет за собой дополнительные трудозатраты и стоимость работ. Кроме того, из-за высокой массы КА на базе данной КП стоимость запуска будет выше. Применение сотопанелей с тепловыми трубами также значительно увеличивает стоимость данной КП.
Также, известен микроспутник для научных исследований (патент RU 2572365, B64G 1/10, B64G 1/64 10.01.2016), выводимый на орбиту из транспортно-пускового контейнера, на корпусе которого в узлах крепления и поворота установлены раскрывающиеся солнечные панели и антенны, удерживаемые поворотными рычагами корпуса. Особенность данного микроспутника состоит в том, что микроспутник содержит корпус в форме прямоугольного параллелепипеда, установленные на нем в узлах крепления и поворота раскрывающиеся солнечные панели и антенны, а также узел соединения с системой отделения микроспутника, расположенной на нижнем торце корпуса, каждый узел крепления и поворота оснащен пружинным механизмом, а на корпусе микроспутника установлены поворотные рычаги, удерживающие солнечные панели и/или антенны в транспортном положении, причем корпус и поворотные рычаги снабжены элементами качения, которые в транспортном положении опираются на внутреннюю поверхность транспортно-пускового контейнера микроспутника.
К недостаткам данного микроспутника можно отнести уникальность его конструкции и, как следствие, уникальность транспортно-пускового контейнера цилиндрической формы в котором данный микроспутник выводится на орбиту, что делает его несовместимым с универсальным стандартом микроспутников CubeSat и тем самым усложняет его адаптацию к широкому спектру средств выведения. Также, наличие на конструкции микроспутника выпирающих за общий габарит корпуса элементов приводит к увеличению объема и массы выводящего его на орбиту контейнера.
Кроме того, известны технические решения космических аппаратов, разработанных иностранными компаниями для задач ДЗЗ.
Одной из таких платформ является космическая платформа Dove разрабатываемая американской компанией Planet (https://directory.eoportal.org/web/eoportal/satellite-missions/d/dove). Данная космическая платформа представляет из себя спутник форм-фактора CubeSat 3U, запускаемый в составе транспортно-пускового контейнера, который имеет раскрывающиеся вдоль длинной стороны панели солнечных батарей, а также раскрывающуюся крышку оптико-электронной системы, в состав которой входит приемопередающая антенна.
Недостатком данной космической платформы является малый габарит (апертура входного зрачка оптико-электронной системы не более 10 см), что не позволяет достичь высоких показателей пространственного разрешения получаемых снимков, а также ограничивает светосилу объектива.
Таким образом, на сегодняшний день не существует действующих группировок космических аппаратов высокого и среднего разрешения полностью удовлетворяющих требованиям заказчиков на новом этапе развития геоиформационных технологий.
Ближайшим аналогом заявленного космического аппарата является космическая платформа серии Dove, изготовления компании Planet. Космические аппараты на базе космической платформы Dove наиболее близки по идеологии изготовления (стандарт CubeSat), а также обладают близкими массо-габаритными характеристиками и характеристиками пространственного разрешения. Однако, стоит отметить, что космические аппараты серии Dove уступают заявленному космическому аппарату «Аурига» по пространственному разрешению (5 м к 2,5 м для высоты орбиты 600 км) и скорости сброса целевой информации (120 к 160 Мбит/с).
Сущность изобретения
Задачей, решаемой заявленным изобретением, является обеспечение проведения дистанционного зондирования Земли оптико-электронной системой высокого разрешения и обеспечение передачи полученных данных космической съемки на наземные средства приема, средствами космического аппарата микро класса стандарта CubeSat форм-фактором 16U, а также упрощение и ускорение процесса изготовления, испытаний и монтажа космического аппарата.
Технический результат заявленного изобретения заключается в миниатюризации конструкции и бортовых систем космической платформы до габаритов микро спутника стандарта CubeSat форм-фактором 16U при условии обеспечения выполнения целевой задачи по дистанционному зондированию Земли средствами оптико-электронной системы в высоком разрешении и передаче полученных данных на наземные средства приема, что приводит к упрощению и ускорению процесса изготовления, испытаний и монтажа космического аппарата.
Технический результат заявленного изобретения достигается за счет того, что космический аппарат дистанционного зондирования Земли микро класса, содержащий корпус, выполненный в форме параллелепипеда, состоящий из боковых панелей корпуса космического аппарата, закрепленных на шпангоуте служебной аппаратуры с разделением внутреннего объема корпуса на две части, а также верхней панели, при этом на внешних сторонах боковых панелей и верхней панели установлены боковые панели солнечных батарей и верхняя панель солнечной батареи соответственно, а шпангоут служебной аппаратуры является основным силовым элементом и выполнен в виде фрезерованной плиты, на котором с одной стороны установлены блок питания и управления со встроенными GPS-приемником и приемопередатчиком УКВ-диапазона, высокоскоростной передатчик целевой информации Ка-диапазона частот с рупорной антенной, электрические кабели, и высокоточные приборы системы управления ориентацией и стабилизацией, установленные на шпангоуте через кронштейн, а с другой стороны шпангоута служебной аппаратуры посредством шпангоута закреплена оптико-электронная система, и три двигателя-маховика, при этом шпангоут оптико-электронной системы выполнен с силовыми ребрами, между которыми размещены на удалении от звездных датчиков и гироскопа двигатели-маховики, при этом входное отверстие оптико-электронной системы закрыто крышкой камеры, на внешней поверхности которой также расположена панель солнечной батареи, на верхней панели корпуса космического аппарата расположены антенны приемопередатчика УКВ-диапазона и GPS-приемника, по углам боковых панелей со стороны верхней панели и крышки камеры выполнены 4 опорных выступа.
В частном случае реализации заявленного технического решения приборы системы управления ориентацией и стабилизацией выполнены в виде двух звездных датчиков, одного микроэлектромеханического гироскопа, трех двигателей-маховиков, а также магнитометров, солнечных датчиков и магнитных исполнительных органов в составе панелей солнечных батарей,
В частном случае реализации заявленного технического решения боковые панели дополнительно соединены между собой.
В частном случае реализации заявленного технического решения место крепления боковых панелей между собой со стороны оптико-электронной системы дополнительно подкреплено по углам косынками.
В частном случае реализации заявленного технического решения панель солнечной батареи расположенная на внешней стороне крышки выполнена на основе многослойной печатной платы с фотоэлектрическими преобразователями.
В частном случае реализации заявленного технического решения боковые и верхняя панели солнечных батарей выполнены на базе многослойных печатных плат с фотоэлектрическими преобразователями и со встроенными в них солнечными датчиками, магнитометрами, магнитными исполнительными органами и микроконтроллером управления.
В частном случае реализации заявленного технического решения крышка камеры снабжена пружинами кручения и зафиксирована в закрытом состоянии нитью натяжения.
В частном случае реализации заявленного технического решения раскрытие крышки под воздействием пружин кручения осуществлено пережиганием нити натяжения.
В частном случае реализации заявленного технического решения космический аппарат выполнен с возможностью запуска, выведения и отделения в составе транспортно-пускового контейнера.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеследующего описания вариантов реализации заявленного технического решения с использованием чертежей, на которых показано:
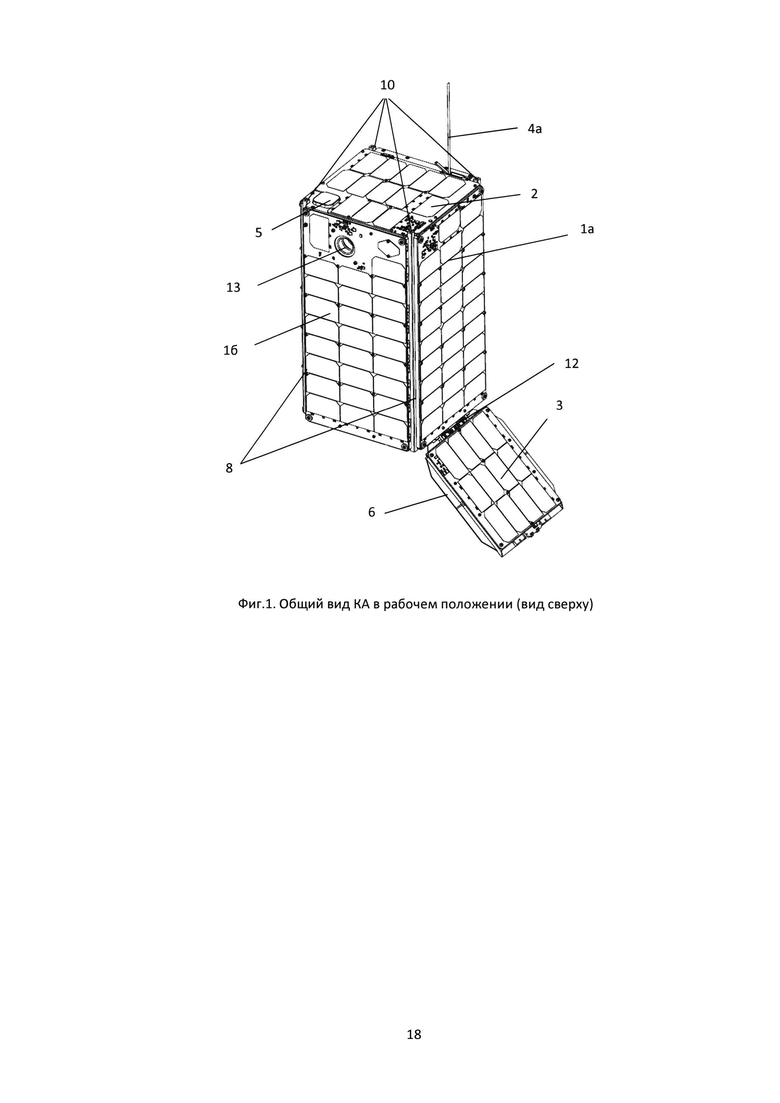
Фиг. 1 - Общий вид КА в рабочем положении (вид сверху).
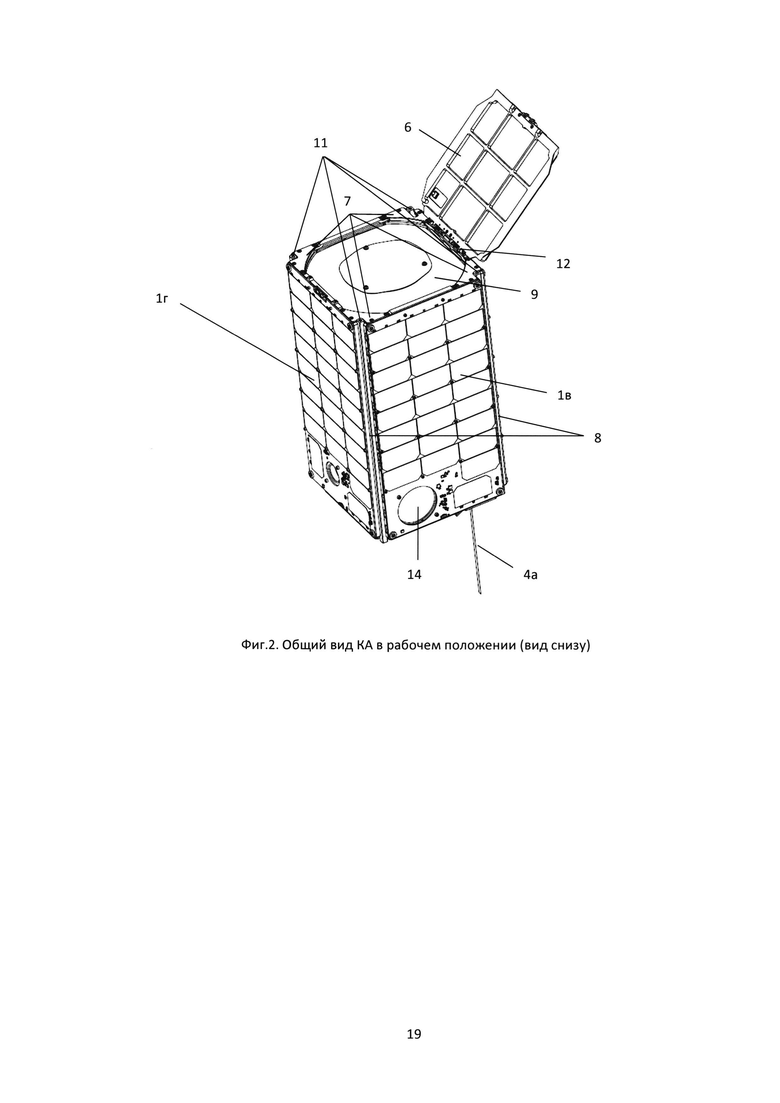
Фиг. 2 - Общий вид КА в рабочем положении (вид снизу).
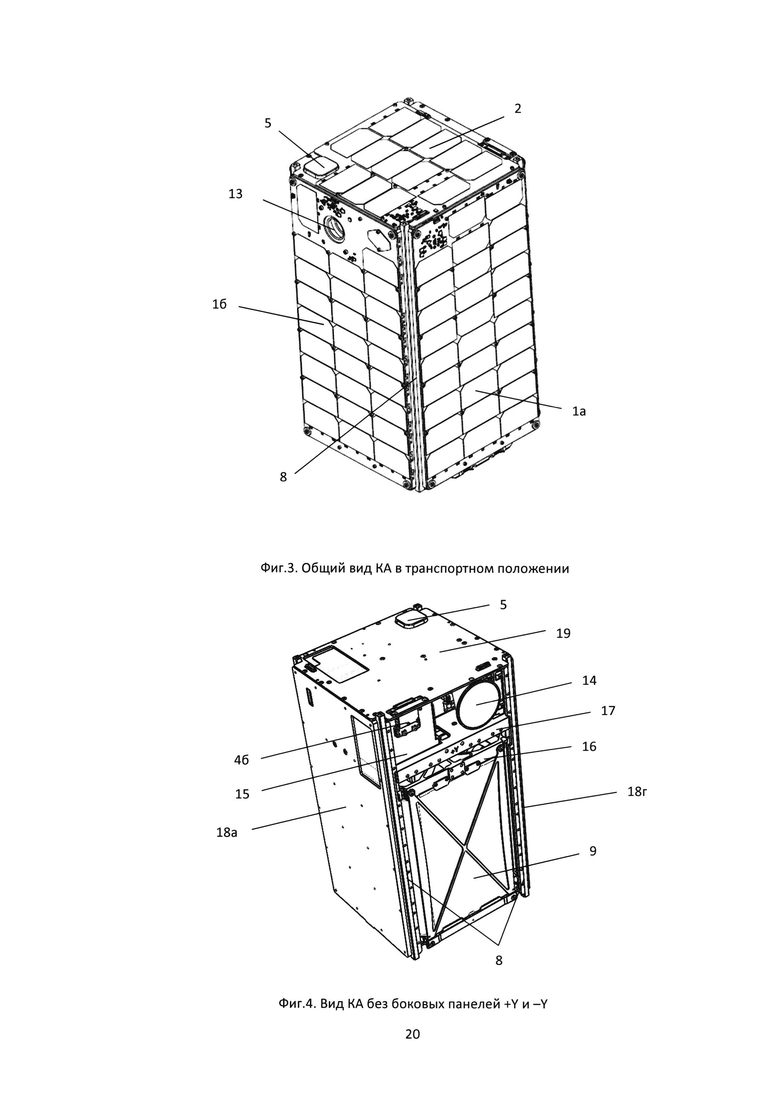
Фиг. 3 - Общий вид КА в транспортном положении.
Фиг. 4 - Вид КА без боковых панелей +Y и -Y.
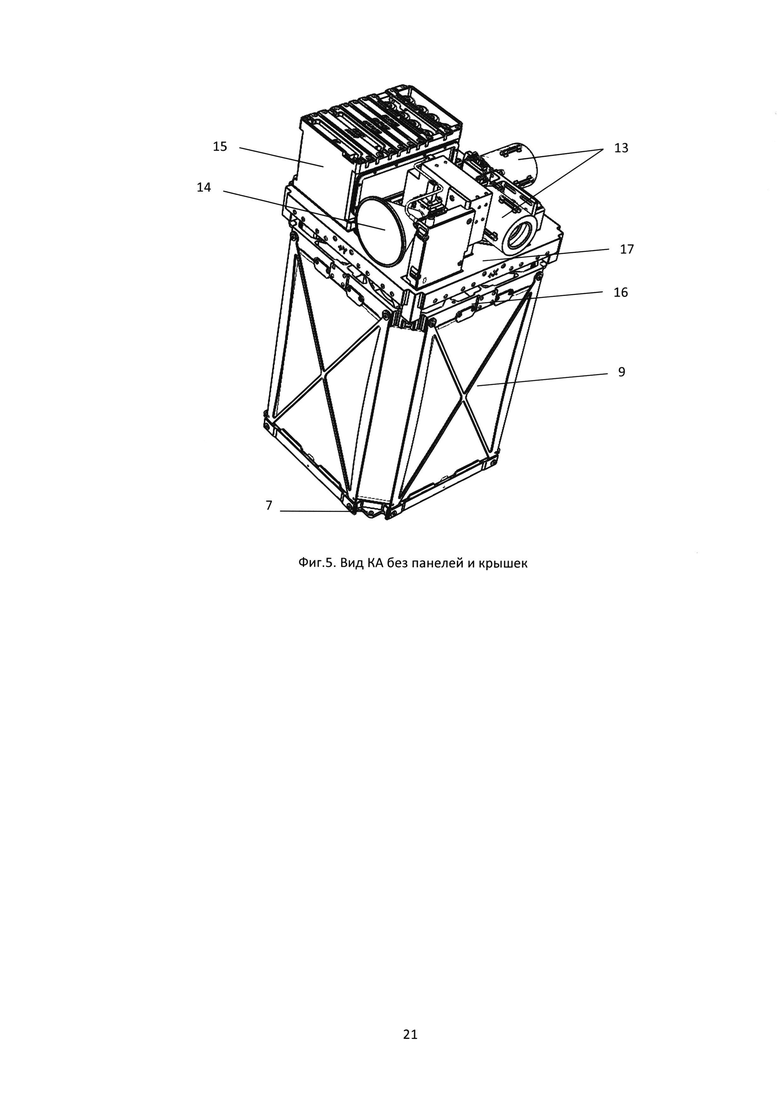
Фиг. 5 - Вид КА без панелей и крышек.
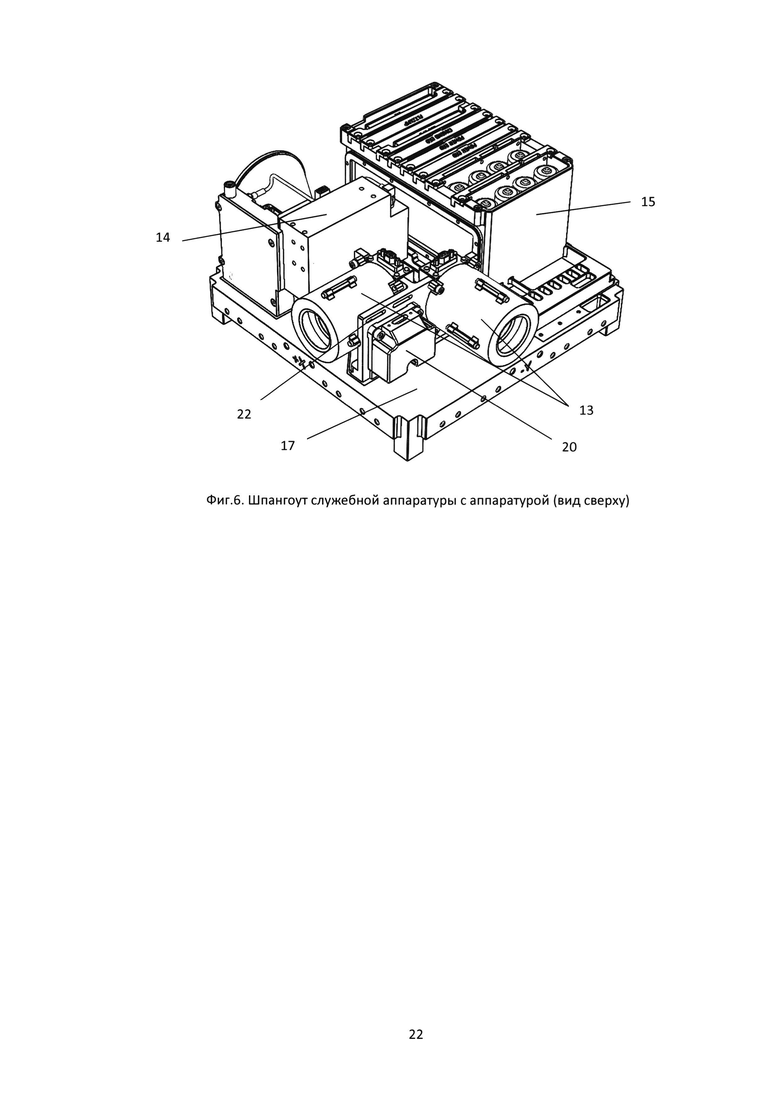
Фиг. 6 - Шпангоут служебной аппаратуры с аппаратурой (вид сверху).
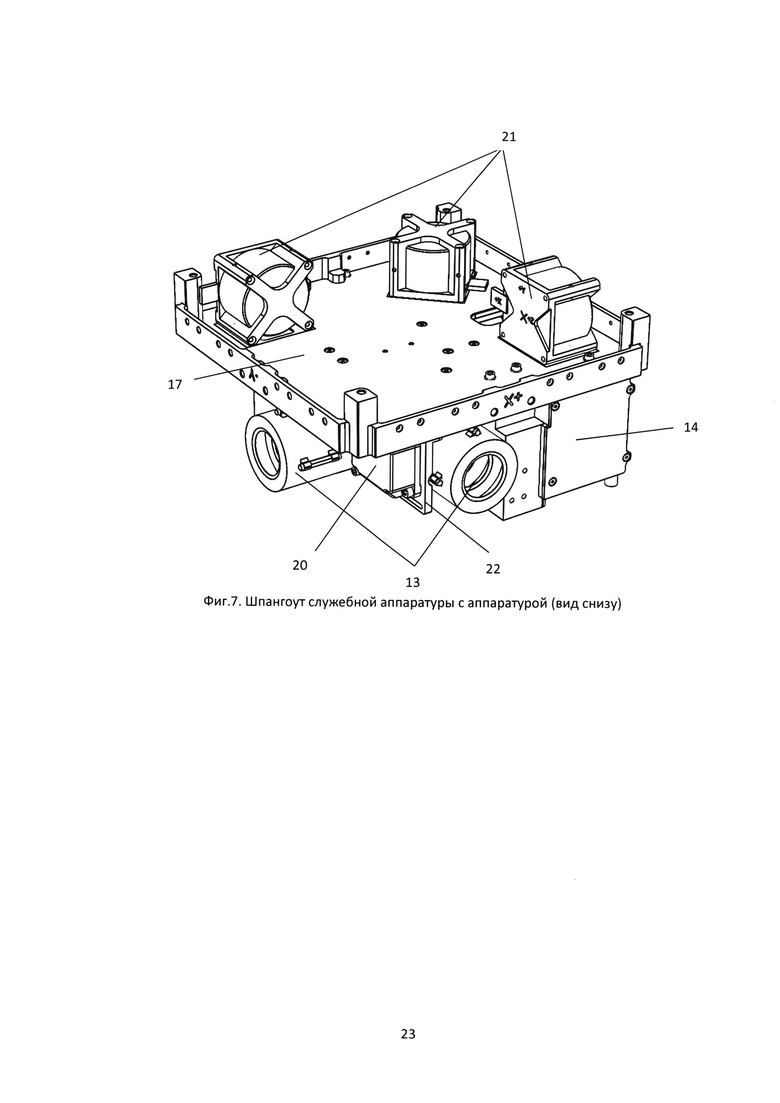
Фиг. 7 - Шпангоут служебной аппаратуры с аппаратурой (вид снизу).
На фигурах обозначены следующие позиции:
1а, 1б, 1в, 1г - боковые панели СБ (панели СБ -X, -Y, +Y, +X соответственно); 2 - верхняя панель СБ (панель СБ -Z); 3 - нижняя панель СБ (панель СБ +Z); 4а, 4б - антенна УКВ-диапазона (в раскрытом и сложенном состоянии соответственно); 5 - GPS-антенна; 6 - крышка камеры; 7 - угловые косынки; 8 - опорные направляющие; 9 - оптико-электронная система; 10 - опорные выступы -Z; 11 - опорные выступы +Z; 12 - пружины раскрытия крышки ОЭС; 13 - звездные датчики; 14 - передатчик Ка-диапазона; 15 - блок питания и управления; 16 - шпангоут ОЭС; 17 - шпангоут служебной аппаратуры; 18а, 18г - боковые панели КА (панели -X, +X соответственно, панели -Y и +Y не представлены); 19 - верхняя панель КА (панель -Z); 20 - гироскоп; 21 - двигатели-маховики; 22 - кронштейн
Раскрытие изобретения
Космический аппарат микро класса «Аурига» выполнен в форме параллелепипеда, состоящего из основного силовоспринимающего элемента конструкции в виде шпангоута (17) служебной аппаратуры, при этом шпангоут (17) представляет собой фрезерованную плиту прямоугольной формы с четырьмя стойками по углам на котором устанавливается основная служебная аппаратура, а именно:
Блок (15) питания и управления со встроенными GPS-приемником и приемопередатчиком УКВ-диапазона, высокоскоростной передатчик целевой информации Ка-диапазона частот с рупорной антенной (14), три двигателя-маховика (21) (ДМ), а также кронштейн (22) с установленными на нем высокоточными приборами системы управления ориентацией и стабилизацией (СУОС), выполненной в виде двух звездных датчиков (13) (ЗД) и одного микроэлектромеханического (МЭМС) гироскопа (20);
при этом ДМ (21) размещены на шпангоуте (17) снизу, на удалении от ЗД (13) и гироскопа (20), с целью минимизации вибрационного воздействия на датчики и гироскоп, а также исключения попадания электрических кабелей во вращающиеся части ДМ (21) (прокладка всех электрических кабелей осуществляется с верхней стороны шпангоута служебной аппаратуры).
С нижней стороны шпангоута (17) служебной аппаратуры на стойках организованы резьбовые отверстия крепления ОЭС (9) через шпангоут (16) ОЭС (9), при этом двигатели-маховики (21) расположены таким образом, что располагаются в свободном пространстве между силовыми ребрами шпангоута (16) ОЭС (9). На боковых сторонах шпангоута (17) служебной аппаратуры выполнены по 2 резьбовых отверстия для соединения с четырьмя боковыми панелями (18а, 18б, 18в, 18г) (панели +X, -X, +Y, -Y), образующими внешний корпус КА;
при этом боковые панели (18а, 18б, 18в, 18г) соединены между собой в углах винтами (внахлест), угловые ребра в местах соединений боковых панелей играют роль опорных направляющих (8), которыми КА опирается на рельсы внутри ТПК в поперечных направлениях и скользит (по рельсам ТПК) в процессе отделения на орбите;
при этом место крепления боковых панелей (18а, 18б, 18в, 18г) между собой со стороны ОЭС (9) дополнительно подкреплено по углам 4-мя косынками. На внешних сторонах боковых панелей (18а, 18б, 18в, 18г) устанавливаются боковые панели (1а, 1б, 1в, 1г) солнечных батарей (СБ), выполненные на базе многослойных печатных плат и являющиеся при этом отдельными электронными устройствами со встроенными в них солнечными датчиками (СД), магнитометрами, магнитными исполнительными органами (МИО) и микроконтроллером управления.
Верхняя сторона КА закрывается верхней панелью (19) (панель -Z); при этом на верхней панели расположены антенны приемопередатчика УКВ-диапазона и GPS-приемника, а также верхняя панель (2) СБ, также являющаяся электронным устройством на базе многослойной печатной платы.
Нижняя сторона КА, где расположено входное отверстие оптической схемы ОЭС (9), на этапе выведения закрыта крышкой (6) (панель +Z); при этом на крышке расположена нижняя (3) панель СБ. После этапа выведения и отделения КА из ТПК крышка (6) раскрывается под действием пружин кручения, обеспечивая открытие входного отверстия ОЭС (9). По углам боковых панелей (18а, 18г) (панели +X, -X) со стороны верхней (2) панели и нижней (3) панели выполнены по 4 опорных выступа (10) для опирания КА в продольном направлении об толкатель и крышку ТПК.
Оси связанной системы координат КА материализуются таким образом, что ось Z КА направлена вдоль оптической оси ОЭС (9) в направлении от входного отверстия ОЭС (9) к шпангоуту (17) служебной аппаратуры; ось Y КА направлена вдоль оси рупорной антенны высокоскоростного передатчика Ка-диапазона (14) в направлении излучения антенны; ось X КА дополняет систему координат КА до правой координатной тройки.
Предлагаемый космический аппарат предполагается к использованию на низких (высотой до 800 км) круговых солнечно-синхронных орбитах для задач ДЗЗ.
Более детальное описание конструкции космического аппарата микро класса «Аурига» представлено ниже.
Предлагаемый космический аппарат в транспортном положении представляет собой параллелепипед (Фиг. 3.), где основным силовоспринимающим элементом конструкции является шпангоут (17) служебной аппаратуры на котором размещена служебная аппаратура в составе блока питания и управления (15), высокоскоростного передатчика (14) целевой информации Ка-диапазона, трех двигателей-маховиков (21), а также прецизионного кронштейна (22), на котором установлены два звездных датчика (13) и гироскоп (20) системы ориентации и стабилизации КА. Причем передатчик Ка-диапазона размещен на шпангоуте (17) таким образом, чтобы его рупорная антенна выходила на внешнюю сторону КА в направлении стороны +Y КА, блок питания и управления располагается рядом с передатчиком Ка-диапазона и занимает на шпангоуте пространство вдоль стороны -X КА, три двигателя-маховика (21) располагаются на противоположной стороне шпангоута (17) служебной аппаратуры (со стороны -Z КА) таким образом, чтобы обеспечивать возможность разворота КА в трех взаимно ортогональных плоскостях, а звездные датчики (13) расположены на прецизионном кронштейне (22) таким образом, что их визирные оси соосны осям космического аппарата +X и -Y соответственно и образуют между собой угол в 90°, а гироскоп (20) размещается на кронштейне в свободной зоне между двумя ЗД (13).
Прецизионный кронштейн (22) позволяет минимизировать ошибку между измерительными системами координат установленных на нем приборов и строительной системой координат КА. Минимизация этой ошибки позволяет повысить точность ориентации КА при работе целевой аппаратуры. Применение единой базовой детали в виде шпангоута (17) служебной аппаратуры позволяет реализовать наибольшую возможную точность относительного монтажа аппаратуры, технологичность процесса сборки; обеспечить лучшие условия теплопередачи для оптимизации температурных режимов бортовой аппаратуры КА.
В состав блока (15) питания и управления кроме бортовой вычислительной машины и элементов коммутации питания и управления системы энергоснабжения входят литий-ионные аккумуляторные батареи в качестве вторичного источника питания КА, а также приемник GPS-сигналов и служебный приемопередатчик УКВ-диапазона.
Такое комплексирование различных бортовых приборов и систем в составе единого блока (15) позволяет уменьшить габаритные размеры и массу данного блока за счет использования единого корпуса и исключения бортовой кабельной сети для соединения приборов и систем, входящих в его состав.
Двигатели-маховики (21) размещены на шпангоуте (17) служебной аппаратуры на удалении от звездных датчиков (13) и гироскопа (20), с целью минимизации вибрационного воздействия на них.
Через резьбовые отверстия стоек шпангоута служебной аппаратуры (17) к нему крепится шпангоут (16) ОЭС (9), являющийся основным несущим элементом полезной нагрузки КА в виде оптико-электронной системы (9). При этом шпангоут (16) ОЭС (9) имеет силовые ребра, в промежутки между которыми помещаются корпуса двигателей-маховиков (21), что также позволяет уменьшить общий габарит КА.
ОЭС (9) представляет собой телескоп в форме прямоугольного параллелепипеда, где основным силовым элементом является шпангоут (16) ОЭС на котором устанавливаются оптико-механические и оптические элементы ОЭС, причем визирная ось телескопа совпадает с осью Z космического аппарата, а входное отверстие оптической системы ОЭС находится со стороны -Z КА. ОЭС (9) выполнена в виде зеркально-линзового осевого телескопа с апертурой 241 мм и фокусным расстоянием 745 мм, что позволяет значительно снизить общий габарит и массу КА, при этом обеспечивая высокое качество получаемых изображений с разрешением до 2.5 м на пиксел в панхроматическом режиме при съемке в надир с орбиты высотой 600 км
На боковых сторонах шпангоута (17) служебной аппаратуры выполнено по 2 резьбовых отверстия для соединения с четырьмя боковыми панелями КА +X, -X, +Y, -Y (18). Эти отверстия расположены близко к серединам сторон шпангоута (17) с целью уменьшения взаимного влияния температурных деформаций панелей (18) и шпангоута (17). При этом, боковые панели (18) соединены между собой в углах винтами внахлест. Угловые ребра в местах соединений играют роль опорных направляющих (8), которыми КА опирается об рельсы внутри ТПК в поперечных направлениях и скользит (по рельсам ТПК) в процессе отделения. Со стороны входного отверстия ОЭС (9) боковые панели (18) дополнительно подкреплены между собой четырьмя угловыми косынками (7).
Со стороны шпангоута служебной аппаратуры (17) на верхних гранях боковых панелей КА (18) через резьбовые соединения закреплена верхняя панель (19) КА, на которой установлены активная GPS-антенна (5) и раскрывающаяся антенна служебного радиокомплекса УКВ-диапазона (4) представляющая из себя четвертьволновой вибратор. Кроме того на верхней панели (19) КА размещены два контакта отделения (условно не показаны), которые срабатывают при отделении КА от ТПК и, замыкая цепь питания, осуществляется коммутация питания на бортовые системы КА. Боковые панели (18) и верхняя панель (19) образуют внешний корпус КА.
На внешних сторонах боковых панелей (18) и верхней панели (19) на резьбовом соединении установлены боковые панели (1) солнечных батарей и верхняя панель (2) СБ соответственно. Данные панели (1, 2) СБ представляют из себя отдельные оконечные электронные устройства на основе многослойных печатных плат в состав которых кроме фотоэлектрических преобразователей (ФЭП) системы энергоснабжения входят такие приборы СУОС, как миниатюрные солнечные датчики, магнитометры и магнитные исполнительные органы. Вся эта периферия управляется встроенным в каждую панель СБ микроконтроллером, что позволяет считать каждую панель СБ (1, 2) отдельным устройством на шине I2C. Применение интеллектуальных панелей СБ (1, 2) в качестве электронных устройств на основе многослойных печатных плат позволяет значительно сократить габарит и массу КА.
Со стороны входного отверстия ОЭС (9) расположена раскрывающаяся крышка (6) камеры, которая находится в закрытом положении до момента демпфирования угловых скоростей КА после отделения от ТПК и стабилизации КА в дежурном режиме (оптическая ось ОЭС направлена в надир). Открытие крышки (6) камеры осуществляется путем пережигания удерживающей ее нити, после чего средствами двух пружин раскрытия крышки ОЭС (12) она переводится в открытое положение и удерживается в нем. На внешней стороне крышки (6) камеры через резьбовое соединение установлена нижняя панель СБ (3). Она, как и прочие панели СБ (1, 2) в составе КА, выполнена на основе многослойной печатной платы, но без размещения приборов СУОС в ее составе.
Во время нахождения КА внутри ТПК, в продольном направлении (вдоль оптической оси КА) КА фиксируется с обеих сторон (стороны -Z и +Z соответственно) через опорные выступы (11, 12), выфрезерованные с торцевых сторон боковых панелей КА +X и -X (18а, 18г) соответственно.
Сборка космического аппарата начинается с установки на шпангоут (17) служебной аппаратуры приборов бортовых систем и кронштейна (22) с приборами СУОС (Фиг. 6., Фиг. 7.).
На следующем этапе сборки шпангоут служебной аппаратуры собирается с ОЭС (9) через шпангоут (16) ОЭС (Фиг. 5.). Сборка осуществляется в вертикальном положении, когда входное отверстие ОЭС направлено вверх, а шпангоут служебной аппаратуры (17) установлен на монтажном столе на такелажной оснастке. На данном и предыдущем этапах сборки КА осуществляется трассировка бортовой кабельной сети.
Далее на сборку ОЭС (9) и шпангоута служебной аппаратуры (17) через резьбовые отверстия в шпангоуте устанавливаются боковые панели КА +X и -X (18а, 18г) соответственно. Одновременно, на верхнюю панель КА (19) устанавливаются GPS-антенна (5) и антенна УКВ-диапазона в зачекованном виде (4б), после чего верхняя панель КА (19) устанавливается на верхнюю торцевую сторону боковых панелей КА +X и -X (18а, 18г) (Фиг. 4.).
На следующем этапе сборки к шпангоуту служебной аппаратуры (17) крепятся боковые панели КА +Y и -Y (условно не показаны), которые соединяются с панелями КА +X и -X (18а, 18г) внахлест, а со стороны входного отверстия ОЭС дополнительно крепятся четырьмя угловыми косынками (7). На этой же стадии на торце боковой панели -X (18г) со стороны входного отверстия ОЭС крепится крышка камеры (6).
Последними на конструкцию КА устанавливаются боковые панели СБ (1а, 1б, 1в, 1г), верхняя панель СБ (2) и нижняя панель СБ (3), крышка камеры (6) переводится в закрытое состояние и фиксируется нитью (Фиг. 3.). В данном состоянии КА может быть установлен на опорные выступы (11) или (12) для проведения над ним дальнейших работ.
КА в транспортном положении (Фиг. 3.) устанавливается путем скольжения опорными направляющими (8) по рельсам ТПК (форм-фактора 16U) внутрь транспортно-пускового контейнера, фиксируется в продольном направлении (вдоль оптической оси) в конструкции ТПК через опорные выступы (11) и (12). При этом, входное отверстие ОЭС должно быть направлено в сторону раскрывающейся дверцы ТПК. В таком положении выключенный КА внутри ТПК доставляется средством выведения на расчетную орбиту, где осуществляется его отделение от ТПК.
В момент отделения КА от ТПК происходит срабатывание контактов отделения, которые замыкают цепь коммутации питания бортовых систем КА. Через несколько минут после отделения КА от ТПК осуществляется автоматическое раскрытие антенны УКВ-диапазона (4а) и КА переходит в режим демпфирования угловых скоростей, полученных в момент отделения от ТПК, средствами магнитных исполнительных органов в составе панелей СБ. После стабилизации, КА переходит в дежурный режим работы по звездным датчикам и гироскопу в качестве измерительных приборов и двигателям-маховикам в качестве исполнительных органов. В данном режиме строится трехосная ориентация, когда оптическая ось КА направлена в направлении надира. Разгрузка накопленного кинетического момента на двигателях-маховиках осуществляется средствами МИО.
Проведя все подготовительные и проверочные операции со служебными бортовыми системами, КА может переходить к выполнению целевой задачи по дистанционному зондированию Земли средствами ОЭС. Выдается команда на раскрытие крышки камеры (6), по которой осуществляется пережигание удерживающей нити, и крышка под действием пружин раскрытия крышки ОЭС (12), выполненных в виде пружин кручения, переходит в раскрытое состояние (Фиг. 1., Фиг. 2.). В данном состоянии крышка остается на весь срок существования КА.
В режиме проведения космической съемки ОЭС КА (9) производит съемку заданных в полетном задании участков земной поверхности и осуществляет сохранение данных съемки в ПЗУ объемом до 1 Тб. При этом, космическая платформа аппарата позволяет производить съемку земной поверхности с отклонением от надира по углу крена и тангажа на ±30°. Скорость перенацеливания КА между объектами космической съемки может составлять порядка 1,5 град/с. Реализован режим работы, когда камера ОЭС отслеживает заданный регион Земли для получения стереоизображений.
В режиме проведения сеанса связи с наземным пунктом приема целевой информации КА наводится на наземный пункт рупорной антенной передатчика Ка-диапазона (14) и удерживает ориентацию антенны в направлении наземной станции в течение всего сеанса передачи данных космической съемки. При этом в автоматическом режиме отслеживается направление на Солнце, и КА наводится рупорной антенной на наземный пункт приема таким образом, чтобы оно не попало в поле зрения камеры ОЭС. После завершения сеанса связи КА возвращается в дежурный режим, когда визирная ось ОЭС направлена в надир.
Новизна предлагаемого технического решения состоит в миниатюризации конструкции и бортовых систем космической платформы до габаритов микро спутника стандарта CubeSat форм-фактором 16U для решения задач ДЗЗ в высоком разрешении.
Задача, на решение которой направлено заявленное изобретение достигается за счет:
- размещения бортовой служебной аппаратуры на единой базовой детали (17) позволяет реализовать наибольшую возможную точность относительного монтажа аппаратуры, технологичность процесса сборки; обеспечить лучшие условия теплопередачи для оптимизации температурных режимов бортовой аппаратуры КА, а также достичь миниатюризации КА.
- применения миниатюрных приборов бортовых систем, таких как звездные датчики (13), двигатели-маховики (21), гироскоп (20) позволяющих уменьшить общий габарит и массу КА.
- размещения нескольких бортовых приборов и систем в составе единого блока питания и управления (15), что позволяет снизить занимаемую этими приборами и системами площадь, а также сократить массу и объем бортовой кабельной сети для соединения их между собой.
- применения компактного передатчика Ка-диапазона (14), что обеспечивает более высокую энергетику канала связи и пропускную способность в единицу массы по сравнению с применяемыми на спутниках-аналогах передатчиками X-диапазона. Применение в составе передатчика высокочастотных комплектующих функционирующих на частотах Ка-диапазоне (26.8 ГГц) обуславливает его компактность в сочетании с высокими скоростными характеристиками передачи данных. Также, компактности добавляет размещение в составе передатчика рупорной антенны. Статическое размещение рупорной антенны на конструкции передатчика выгодно отличается от антенны на поворотном устройстве в части массово-габаритных характеристик, а также не требует прокладки по конструкции КА бортовой кабельной сети.
- применения панелей СБ (1а, 1б, 1в, 1г, 2) на основе многослойных печатных плат с встроенными микроминиатюрными приборами СУОС, что позволяет значительно сократить массу и габарит КА за счет того, что данные приборы СУОС не занимают дополнительного места в составе КА и не требуют прокладки к ним бортовой кабельной сети.
- размещения двигателей-маховиков (21) между силовыми ребрами шпангоута ОЭС (16), что позволяет уменьшить габарит КА вдоль оптической оси.
- применения компактной ОЭС (9) в виде зеркально-линзового осевого телескопа с апертурой 241 мм и фокусным расстоянием 745 мм, что позволяет значительно снизить общий габарит и массу КА при этом обеспечивая высокое качество получаемых изображений с разрешением до 2.5 м на пиксел в панхроматическом режиме при съемке в надир с орбиты высотой 600 км.
- разработки КА по стандарту CubeSat, что позволяет осуществлять запуск КА в составе ТПК, что упрощает процесс адаптации КА к средству выведения, а также снижает ударные нагрузки на конструкцию КА при его отделении в сравнении с методом отделения с применением пиротехнических средств.
- применения ТПК для запуска КА, что позволяет унифицировать процесс адаптации КА практически к любому средству выведения.
- минимизации количества элементов конструкции КА, применения миниатюрных бортовых приборов и систем, малой массы (21 кг) и габарита (250×250×450 мм в транспортном положении (Фиг. 3.)) КА, что позволяет упростить и ускорить процесс монтажа, испытаний и адаптации КА.
- выполнения панелей СБ (1, 2, 3) на основе фотоэлектрических преобразователей из трехкаскадного арсенида галлия, что позволило снизить габариты и массу СБ без снижения эффективности электроснабжения бортовых систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
| КОНСТРУКЦИЯ УНИФИЦИРОВАННОЙ КОСМИЧЕСКОЙ ПЛАТФОРМЫ, ОРИЕНТИРОВАННОЙ НА АВТОМАТИЗИРОВАННУЮ СБОРКУ | 2024 |
|
RU2825163C1 |
| МИКРОСПУТНИК ДЛЯ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 2010 |
|
RU2457157C1 |
| Метод передачи информации из космоса и устройство для его осуществления | 2020 |
|
RU2755444C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2014 |
|
RU2569658C2 |
| МИКРОСПУТНИК | 2014 |
|
RU2572365C1 |
| СПОСОБ СБОРКИ НЕСУЩЕЙ КОНСТРУКЦИИ МАЛОГО КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2753063C1 |
| Спутник-конструктор - учебно-демонстрационная модель | 2017 |
|
RU2693722C2 |
| КОСМИЧЕСКИЙ АППАРАТ, ЕГО МОДУЛЬ ПОЛЕЗНОЙ НАГРУЗКИ И МОДУЛЬ СЛУЖЕБНЫХ СИСТЕМ | 2016 |
|
RU2617162C1 |
| КОСМИЧЕСКИЙ МОДУЛЬ | 2015 |
|
RU2621783C2 |
Изобретение относится к космическим аппаратам (КА), создаваемым на базе CubeSat. КА содержит корпус в форме параллелепипеда, состоящий из боковых панелей (18а,…18г), закрепленных на шпангоуте (17) служебной аппаратуры в виде фрезерованной плиты. На боковых и верхней (-Z) панелях, а также на крышке камеры, со стороны нижней панели (+Z), установлены солнечные батареи (условно сняты, как и панели +Y и -Y). На плите (17) смонтированы: блок питания и управления (15), антенны УКВ-диапазона (4а, 4б), передатчик Ка-диапазона (14), гироскоп и звёздные датчики (не видны). Под плитой (17) закреплены: посредством шпангоута (16) оптико-электронная система (9), двигатели-маховики (не видны) и др. элементы. На верхней панели (19) установлены GPS-антенна (5) и антенны УКВ-приемопередатчика. Угловые ребра в стыках боковых панелей играют роль опорных направляющих (8) при взаимодействии КА с транспортно-пусковым контейнером. Технический результат заключается в миниатюризации конструкции и бортовых систем до габаритов спутника CubeSat с форм-фактором 16U при выполнении КА своей целевой задачи, что приводит к упрощению и ускорению процесса изготовления, испытаний и монтажа КА. 8 з.п. ф-лы, 7 ил.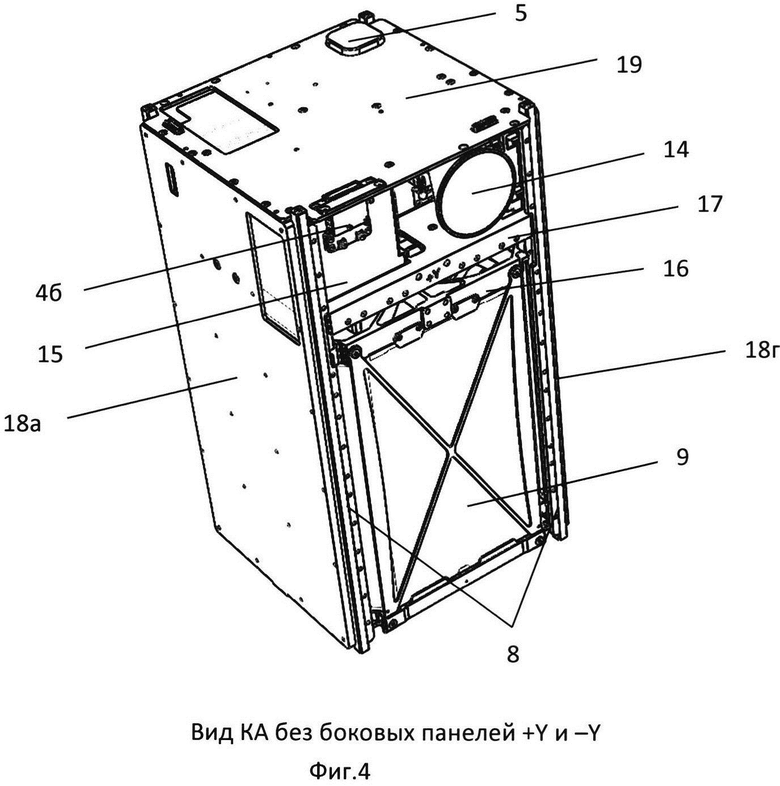
1. Космический аппарат дистанционного зондирования Земли микрокласса, содержащий корпус, выполненный в форме параллелепипеда, состоящий из боковых панелей корпуса космического аппарата, закрепленных на шпангоуте служебной аппаратуры, с разделением внутреннего объема корпуса на две части, а также из верхней панели, при этом на внешних сторонах боковых панелей и верхней панели установлены боковые панели солнечных батарей и верхняя панель солнечной батареи соответственно, а шпангоут служебной аппаратуры является основным силовым элементом, выполненным в виде фрезерованной плиты, на котором с одной стороны установлены блок питания и управления со встроенными GPS-приемником и приемопередатчиком УКВ-диапазона, высокоскоростной передатчик целевой информации Ка-диапазона частот с рупорной антенной, электрические кабели и высокоточные приборы системы управления ориентацией и стабилизацией, установленные на шпангоуте через кронштейн, а с другой стороны указанного шпангоута служебной аппаратуры посредством шпангоута закреплена оптико-электронная система и три двигателя-маховика, при этом шпангоут оптико-электронной системы выполнен с силовыми ребрами, между которыми размещены на удалении от звездных датчиков и гироскопа двигатели-маховики, входное отверстие оптико-электронной системы закрыто крышкой камеры, на внешней поверхности которой также расположена панель солнечной батареи, на верхней панели корпуса космического аппарата расположены антенны приемопередатчика УКВ-диапазона и GPS-приемника, а по углам боковых панелей со стороны верхней панели и крышки камеры выполнены четыре опорных выступа.
2. Космический аппарат по п. 1, отличающийся тем, что приборы системы управления ориентацией и стабилизацией выполнены в виде двух звездных датчиков, одного микроэлектромеханического гироскопа, трех двигателей-маховиков, а также магнитометров, солнечных датчиков и магнитных исполнительных органов в составе панелей солнечных батарей.
3. Космический аппарат по п. 1, отличающийся тем, что боковые панели дополнительно соединены между собой.
4. Космический аппарат по п. 1, отличающийся тем, что место крепления боковых панелей между собой со стороны оптико-электронной системы дополнительно подкреплено по углам косынками.
5. Космический аппарат по п. 1, отличающийся тем, что панель солнечной батареи, расположенная на внешней стороне крышки, выполнена на основе многослойной печатной платы с фотоэлектрическими преобразователями.
6. Космический аппарат по п. 1, отличающийся тем, что боковые и верхняя панели солнечных батарей выполнены на базе многослойных печатных плат с фотоэлектрическими преобразователями и со встроенными в них солнечными датчиками, магнитометрами, магнитными исполнительными органами и микроконтроллером управления.
7. Космический аппарат по п. 1, отличающийся тем, что крышка камеры снабжена пружинами кручения и зафиксирована в закрытом состоянии нитью натяжения.
8. Космический аппарат по п. 7, отличающийся тем, что открытие крышки под воздействием пружин кручения осуществляется пережиганием нити натяжения.
9. Космический аппарат по п. 1, отличающийся тем, что космический аппарат выполнен с возможностью запуска, выведения и отделения в составе транспортно-пускового контейнера.
| МИКРОСПУТНИК ДЛЯ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 2010 |
|
RU2457157C1 |
| Приспособление к коноплеуборочной машине для удаления сорных растений и путанины из комлевой части срезанных стеблей конопли | 1953 |
|
SU99461A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Des mini-satellites d’observation lancés par douzaines | |||
| В: LE BLOG DES SCIENCES | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| На сайте Hi-News.ru | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Largest Flock of Earth-Imaging Satellites Launch into Orbit From Space Station, by Sensors Staff, Feb.13, 2014, 1:00 am | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

