Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ).
К числу мероприятий, направленных на улучшение удельных характеристик СЭП, следует отнести внедрение в практику относительно нового вида интерфейса, а именно мультиплексного канала обмена (МКО) для осуществления электрической связи между бортовой вычислительной системой (БВС) и системой электропитания. Однако применение сложнейшей электронной аппаратуры в составе СЭП КА с большим сроком активного существования, как правило, приводит к повышению вероятности возникновения в ней отказов, в том числе таких, как нарушения обмена между БВС и СЭП. Одной из причин возникновения отказов или сбоев в работе СЭП является воздействие на нее тяжелых заряженных частиц (ТЗЧ) или высокоэнергетических протонов космического пространства (ВЭП КП).
Высокоэнергетические протоны, имеющие большую скорость движения (до 800-1000 км/с), преодолевают силу притяжения Солнца и попадают в околоземное космическое пространство. Тяжелые заряженные частицы, движущиеся в космическом пространстве также с большой скоростью, представляют собой ядра тяжелых элементов, а к их источникам относятся далекие звезды (О.Н. Коротцев. Астрономия для всех, издательский дом «Азбука-классика», г. Санкт-Петербург, 2008).
При попадании ТЗЧ или ВЭП КП на микросхемы индуцированный импульс тока может привести к открыванию биполярных транзисторов и попаданию паразитной тиристорной структуры в низкоомное состояние. Результатом будет формирование короткого замыкания между шинами питания транзистора, потеря работоспособности пораженного элемента и резкий рост тока потребления, способный привести к «выгоранию» пораженного элемента и функциональному отказу. Такой механизм действия ТЗЧ и ВЭП КП принято называть тиристорным эффектом (ТЭ) (А.И. Чумаков. Действие космической радиации на интегральные схемы. М., Радио и связь, 2004, 320 с.).
Экспериментально установлено, что воздействие ТЭ можно остановить снятием питания с пораженной микросхемы. Для интегральных схем (ИС), способных без последствий находиться в состоянии ТЭ значительное время (до пяти минут), парирование ТЭ возможно организовать с помощью программного обеспечения (А.С. Тарараксин и др. Методики исследования и предотвращения развития катастрофического отказа вследствие одиночного тиристорного эффекта. Сборник трудов Всероссийской научно-технической конференции «Проблемы разработки перспективных микро- и наноэлектронных систем» (МЭС-12), Институт проблем проектирования в микроэлектронике РАН (ИППМ РАН), М., 2012).
Известен способ управления системой электропитания космического аппарата (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение. Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011, аналог), заключающийся в управлении зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности (или напряжения) данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности (напряжения) данной аккумуляторной батареи.
Недостатком аналога является то, что он не позволяет повысить живучесть и надежность функционирования СЭП в случае нарушения по какой-либо причине энергобаланса с вытекающими отсюда негативными последствиями.
Известен способ управления автономной системой электропитания космического аппарата (патент РФ на изобретение №2467449, кл. Н02J 7/36, опубл. 20.11.2012, бюл. №32, прототип), содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы снижается до заданного порогового значения, запрещают работу всех разрядных устройств; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей или по внешней разовой команде.
Недостатком прототипа является то, что он не позволяет повысить живучесть и надежность функционирования СЭП в составе КА в условиях воздействия поражающих факторов ТЗЧ и ВЭП КП. Необходимо отметить, что наиболее уязвимым элементом СЭП к воздействию ТЗЧ и ВЭП КП являются оконечные устройства (ОУ), используемые в составе СЭП в качестве абонента МКО.
Задачей предлагаемого изобретения является повышение надежности и живучести функционирования СЭП в части существенного уменьшения вероятности возникновения аварийной ситуации из-за нарушения информационного обмена между системой электропитания и бортовой вычислительной системой (БВС), осуществляемого по мультиплексному каналу обмена.
Указанная задача решается тем, что в способе управления системой электропитания космического аппарата (КА) повышенной живучести, содержащей фотоэлектрическую батарею (БФ) и n аккумуляторных батарей (АБ) и по n зарядных и разрядных устройств, заключающемся в управлении зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения системы электропитания (СЭП); введении запрета на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снятии этого запрета при повышении уровня заряженности данной АБ; формировании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности; запрете работы всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; сбросе запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности, в системе электропитания для связи с бортовой вычислительной системой (БВС), осуществляемой по дублированному магистральному последовательному интерфейсу (мультиплексному каналу обмена), в качестве устройства интерфейса используют оконечное устройство (ОУ) с контроллером, причем каждое зарядно-разрядное устройство (ЗРУm), состоящее из одного или нескольких зарядных (разрядных) устройств, оснащают основным (ОУi-m) и резервным (ОУj-m) оконечными устройствами; используя алгоритм СЭП из состава бортового программного обеспечения БВС, с заданной периодичностью опрашивают параметры (массивы) СЭП и идентифицируют отказ (работоспособность) каждого ОУi-m; в качестве критерия отказа ОУ принимают факт появления ошибки обмена, например несовпадение контрольных сумм передаваемых массивов; после идентификации отказа ОУi-m в каком-либо ЗРУm программно перезагружают ОУi-m, для чего в течение заданного интервала времени формируют в соответствии с алгоритмом СЭП необходимые команды управления (КУ), при этом перезагрузку ОУ выполняют, например, путем перехода на резервное ОУj-m с последующим возвратом на основное ОУi-m; повторяют последовательность данных операций; в случае парирования отказа ОУi-m обмен продолжают с использованием ОУi-m; в случае повторной идентификации отказа ОУi-m осуществляют программно переход на резервное оконечное устройство ОУj-m, используя соответствующую КУ; последовательность функционирования ОУj-m выбирают аналогичной последовательности функционирования ОУi-m; возврат с ОУj-m на ОУi-m при необходимости выполняют по разовой команде с наземного комплекса управления.
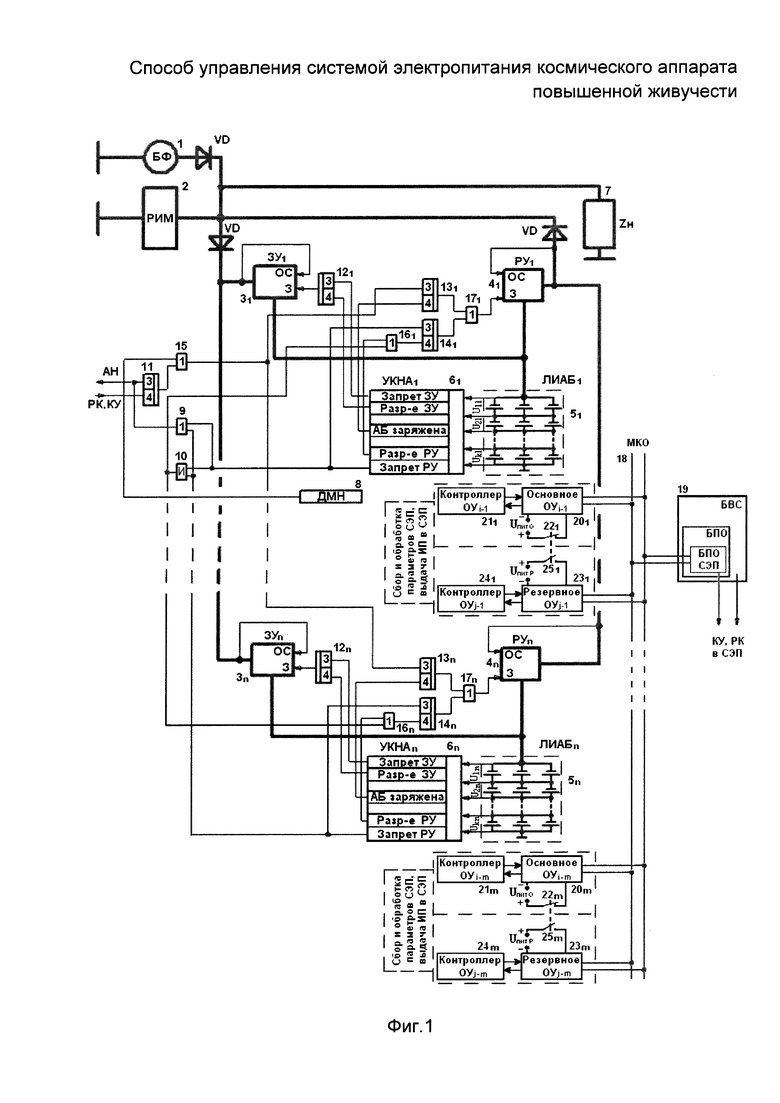
Пример функциональной схемы СЭП, в которой реализуется предлагаемый способ, приведен на фиг. 1, где обозначено:
1 - батарея фотоэлектрическая;
2 - регулятор избытка мощности (РИМ) БФ;
31…3n - зарядные устройства (ЗУ);
41…4n - разрядные устройства (РУ);
51…5n - аккумуляторные батареи;
61…6n - устройства контроля напряжения аккумуляторов (УКНА);
7 - нагрузка СЭП (бортовая аппаратура);
8 - датчик минимального напряжения СЭП (ДМН);
9 - логический элемент m из n;
10 - логический элемент И;
11, 121…12n, 131…13n, 141…14n - R-S триггеры;
15 - логический элемент И;
161…16n, 171…17n - логические элементы ИЛИ;
18 - мультиплексный канал обмена (МКО) 18;
19 - бортовая вычислительная система (БВС) 19;
201…20m - основное оконечное устройство (ОУi);
211…21m - контроллер ОУi;
221…22m - коммутатор ОУi;
231…23m - резервное оконечное устройство (ОУj);
241…24m - контроллер ОУj;
251…25m - коммутатор ОУj;
ОС - вход обратной связи;
З - вход запрета работы.
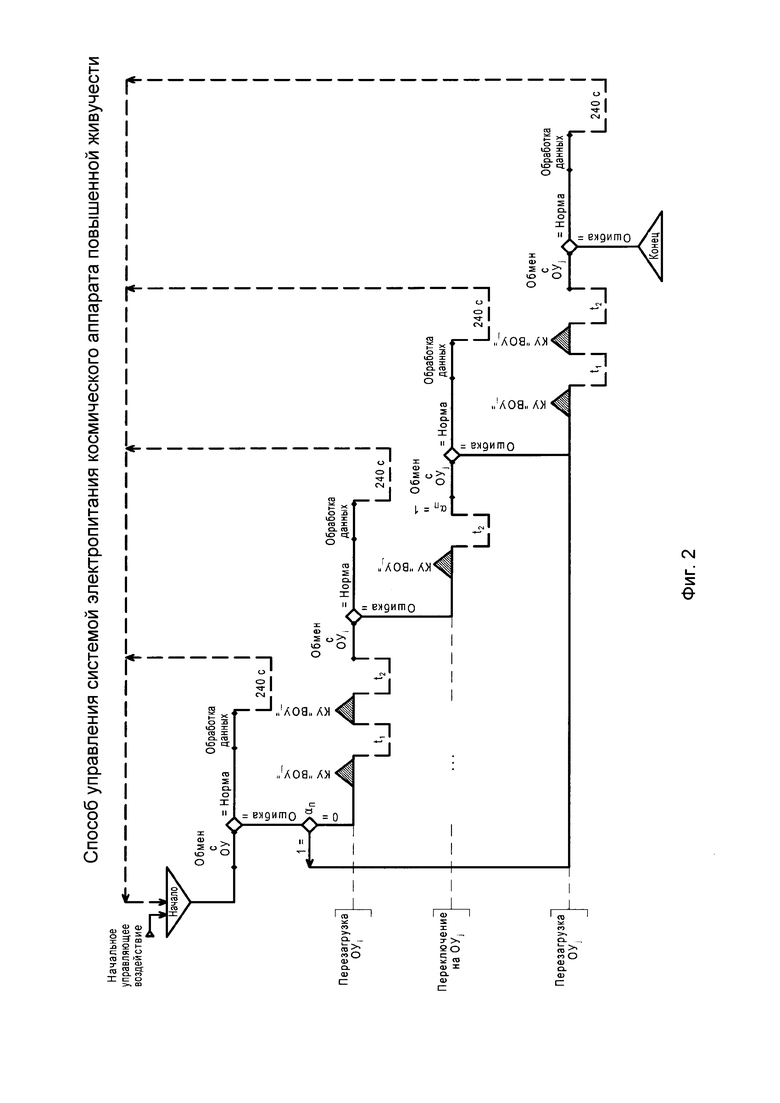
На фиг. 2 показана временная диаграмма работы оконечных устройств с учетом возникновения в них отказов (сбоев).
Управление системой электропитания КА повышенной живучести (фиг. 1), состоящей, например, из параллельно включенных между собой БФ 1, регулятора избытка мощности РИМ 2, зарядных устройств ЗУ 31…3n, разрядных устройств РУ 41…4n, аккумуляторных батарей АБ 51…5n и нагрузки, в качестве которой служит бортовая аппаратура БА 7, осуществляют без вмешательства с наземного комплекса управления (НКУ). Зарядные и разрядные устройства образуют зарядно-разрядное устройство (ЗРУm), причем одно ЗРУ может иметь в своем составе по одному или по два ЗУ и РУ. В последнем случае справедливо соотношение n=2⋅m.
Управление регулятором избытка мощности, зарядными и разрядными устройствами, а также панелями солнечных батарей осуществляют в зависимости от освещенности БФ, входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства ЗУ 31…3n обеспечивают заряд АБ 51…5n, а разрядные устройства РУ 41…4n обеспечивают питание БА 7 стабилизированным напряжением. Цепи непрерывного управления (обратной связи - ОС) ЗУ 31…3n подключены к шине БФ 1, а цепи непрерывного управления РУ 41…4n подключены к выходной шине СЭП (на вход БА 7).
Для автономного управления СЭП, т.е. без вмешательства с НКУ, в составе БВС 19 формируют входящие в бортовое программное обеспечение (БПО) алгоритмы СЭП, которые получают необходимую информацию из СЭП по дублированному магистральному последовательному интерфейсу (мультиплексному каналу обмена) 18. В СЭП применяют резервированное устройство интерфейса (на фиг. 1 выделено пунктирными линиями), состоящее из основного ОУi 201…20m и резервного ОУj 231…23m оконечных устройств, основного 211…21m и резервного 241…24m контроллеров (ГОСТ Р 52070-2003. Интерфейс магистральный последовательный системы электронных модулей. Общие требования). В процессе обмена БВС с СЭП оконечные устройства, установленные для повышения надежности СЭП в каждом из m зарядно-разрядных устройств, выполняют функцию абонента. Контроллеры 21…21m и 241…24m осуществляют сбор и обработку параметров СЭП, причем по данным обработки параметров СЭП формируют информационные массивы, которые выводятся в составе информации оперативного контроля (ИОК) по запросу БПО СЭП. Кроме того, устройства интерфейса транслируют информационные посылки (ИП), представляющие собой команды управления (КУ), выдаваемые в СЭП из БВС по МКО. Основные (ОУi) и резервные (ОУj) оконечные устройства имеют собственные коммутаторы (на фиг. 1 они обозначены через 221…22m и 251…25m), предназначенные для отключения (включения) при необходимости питающего напряжения соответствующего оконечного устройства.
В зависимости от степени заряженности АБ 51…5n производят запрет или разрешение работы ЗУ 31…3n и РУ 41…4n, причем степень заряженности АБ определяют различными способами в зависимости от типа АБ, в том числе: с помощью датчиков давления (для НВАБ); с помощью датчиков напряжения группы аккумуляторов (для ЛИАБ). На фиг. 1 схематично показаны литий-ионные аккумуляторные батареи и соответствующие устройства контроля напряжения группы аккумуляторов для определения степени заряженности ЛИАБ в целом.
При достижении максимальной степени заряженности конкретной АБ сигнал с выхода «Запрет ЗУ» ее устройства контроля напряжения аккумуляторов УКНА 61…6n, с помощью R-S триггера 121…12n запрещает работу ее ЗУ. После разряда АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода «Разрешение ЗУ» (на фиг. 1 - «Разрешение ЗУ») УКНА 61…6n.
При достижении заданного минимального уровня заряженности конкретной АБ сигнал с выхода "Запрет РУ" ее УКНА 61…6n, проходя через R-S триггер 141…14n и логический элемент ИЛИ 171…17n, поступает на вход запрета работы соответствующего РУ. Данная аккумуляторная батарея переводится в режим хранения. После заряда этой АБ до некоторого заданного уровня запрет разряда снимают сигналом с выхода "Разрешение РУ" (на фиг. 1 - «Разр. РУ») УКНА 61…6n (через логические элементы 161…16n, R-S триггеры 141…14n, логические элементы 171…17n).
В случае нештатной ориентации солнечных батарей КА на Солнце или по иной причине возможно нарушение энергобаланса в СЭП. Тогда сигналы с выходов "Запрет РУ" всех УКНА 61…6n поступают на входы логических элементов 9 (m из n) и 10 (логический элемент И). При аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 9 формируется управляющий сигнал аварийной нагрузки («АН»), который выдается в бортовой комплекс управления (БКУ) для отключения части БА 7. БКУ на фиг. 1 не показан. Этот сигнал запоминается на R-S триггере 11. Запоминание снимается по внешней разовой команде (РК). При отключении БКУ части БА 7 снижается скорость расходования энергии АБ 51…5n. Остается подключенной часть БА - приборы систем терморегулирования, телеметрии и других необходимых систем. Эти системы обеспечивают температурные режимы и контроль параметров БА 7. Появляется возможность более длительное время питать нагрузку и продолжать работы по выводу КА из нештатной ситуации. Таким образом, обеспечивается возможность использования средств БКУ для адаптивного изменения схемы питания БА 7 в зависимости от текущего состояния энергетических возможностей СЭП.
При аварийном разряде всех n работающих АБ 51…5n до минимального уровня заряженности на выходе логического элемента 10 появляется сигнал, который проходя через логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n снимает запрет на работу всех разрядных устройств. Далее, если аварийная ситуация продолжается, происходит синхронный разряд на оставшуюся часть нагрузки всех АБ 51…5n. Имеющаяся в АБ 51…5n электрическая емкость используется полностью.
При дальнейшем аварийном разряде выходное напряжение системы снижается до заданного порогового значения, срабатывает датчик (пороговый) минимального напряжения 8, а поскольку этому предшествовало запоминание управляющего сигнала «АН» на R-S триггере 11, то его сигнал пройдя через логический элемент И 15 и R-S триггеры 131…13n и логические элементы ИЛИ 171…17n запрещает работу всех РУ 41…4n и логическим уровнем на входах элементов ИЛИ 171…17n блокирует прохождение управляющих сигналов, разрешающих работу РУ 41…4n по сигналам об уровне напряжения группы аккумуляторов от УКНА 61…6n. Запоминание управляющего сигнала «АН» обеспечивает защиту от обесточивания БА 7 при ложном срабатывании датчика ДМН 8, или при его срабатывании в случае перегрузки по выходным шинам СЭП, не связанной с нарушением ориентации БФ 1 и аварийным разрядом АБ 51…5n.
Поскольку цепи непрерывного управления (обратной связи - ОС) ЗУ 31…3n подключены к шине БФ, а цепи непрерывного управления (ОС) РУ 41…4n подключены к выходной шине СЭП, в первую очередь будет обеспечиваться питание БА 7. При нарушении ориентации БФ 1 на Солнце или уходе КА в тень питание всей БА 7 и заряд АБ 51…5n прекращается. Разряд АБ 51…5n не производится, так как сигнал «Запрет заряда» не снят.
При заряде какой-либо из аккумуляторных батарей АБ 51…5n до некоторого значения емкости сигнал с выхода УКНА 61…6n «АБ заряжена» пройдя через R-S триггер (131…13n) и логический элемент ИЛИ (171…17n) снимает запрет на работу своего разрядного устройства и блокировку прохождения управляющих сигналов, разрешающих работу разрядным устройствам РУ 41…4n по сигналам об уровне заряженности от УКНА 61…6n. СЭП переходит в штатный режим работы после заряда одной АБ или всех АБ 51…5n, или по РК, выдаваемой с НКУ.
Снижение вероятности возникновения аварийной ситуации из-за нарушения связи между СЭП и БВС, осуществляемого по мультиплексному каналу обмена, достигается за счет использования соответствующего алгоритма из состава БПО (далее по тексту: алгоритм БПО СЭП).
Алгоритм БПО СЭП осуществляет обращение к ОУi (ОУj) СЭП для съема информации о состоянии системы электропитания (о емкостях АБi и др. параметрах) с заданной частотой (периодом). Для изделий разработки АО «РКЦ «Прогресс» выбирается период, равный 4 минутам, что является оптимальным для решения основной задачи и достаточным для идентификации возможного отказа ОУi (ОУj) с последующим его парированием, в том числе при воздействии на ОУi (ОУj) факторов ТЗЧ и ВЭП КП.
Для защиты от единичных сбоев при передаче данных по МКО все обмены в случае появления ошибок производятся не менее двух раз по каждой работоспособной линии передачи информации МКО (с необходимой временной задержкой между обменами), после чего считается, что произошло устойчивое нарушение обмена по МКО.
Допустим, что в результате воздействия факторов ТЗЧ и ВЭП КП (или по иной причине) произошло устойчивое нарушение обмена между БВС и СЭП. В этом случае алгоритмом БПО СЭП формируется следующая последовательность программных операций (фиг. 2):
1) перезагружается ОУi путем поочередной подачи КУ на отключение с него питания и КУ на включение питания с временным промежутком между командами, равным t2;
2) осуществляется очередной обмен с ОУi через время t1, необходимое для загрузки программного обеспечения (ПО) контроллера ОУi;
3) продолжается выполнение штатной логики контроля работы СЭП с ОУi, если обмен происходит нормально;
4) выполняется переключение на ОУj посредством выдачи соответствующей команды управления, например КУ «Включение резервного ОУ», если ошибка обмена сохраняется;
5) осуществляется обмен с OYj через время t1, необходимое для загрузки программного обеспечения (ПО) контроллера ОУj;
6) продолжается выполнение штатной логики контроля работы СЭП с OYj, если обмен происходит нормально.
Перезагрузку ОУ выполняют путем переключения между ОУ, используя команды управления «Включение резервного ОУ» и «Включение основного ОУ», что позволяет сократить количество необходимых КУ. По команде «Включение резервного (основного) ОУ» производится одновременное отключение основного (резервного) и включение резервного (основного) ОУ.
Перезагрузку ОУj выполняют аналогичной последовательностью программных операций, причем в случае отказа OYj для возможности повторной проверки работоспособности ОУi и дальнейшей работы с ним переход на ОУi осуществляют по разовой команде с НКУ.
Применение описанной выше последовательности программных операций необходимо для того, чтобы идентифицировать характер отказа ОУ. Если после перезагрузки отказавшего ОУ его работоспособность восстанавливается, то это свидетельствует с большой вероятностью о том, что отказ или сбой данного ОУ произошел в результате воздействия факторов ТЗЧ или ВЭП КП.
Под обменом с ОУi (ОУj) понимают как считывание информации из ОУi (ОУj), так и передачу данных (управляющих воздействий) в ОУi (ОУj).
В качестве критерия ошибки обмена (идентификации отказа/сбоя) могут быть использованы стандартные признаки (ГОСТ Р 52070-2003. Интерфейс магистральный последовательный системы электронных модулей. Общие требования), например:
- отсутствие ответного слова (ОС);
- появление признаков в ОС, например, «абонент занят», «ошибка в сообщении».
Однако для идентификации отказа ОУi (ОУj) от воздействия факторов ТЗЧ и ВЭП КП этих признаков может быть недостаточно, поэтому вводится дополнительная операция, а именно проверка контрольных сумм (КС) передаваемых массивов. Факт несовпадения КС передаваемых массивов используют в качестве критерия отказа ОУi (ОУj).
Положительный эффект достигается за счет:
- выбора надежного метода идентификации отказа (сбоя) ОУi (ОУj);
- программного ограничения времени (например, 4 минуты) на идентификацию отказа (сбоя) ОУi (ОУj);
- своевременного (см. фиг. 2) снятия питания с элемента устройства интерфейса для ликвидации ТЭ путем программной выдачи команды на отключение напряжения с последнего;
- перехода при необходимости с ОУi на ОУj и возврата по разовой команде с НКУ с ОУi на ОУj.
- установки в каждом ЗРУ отдельного дублированного устройства интерфейса.
Установка в каждом ЗРУ отдельного устройства интерфейса и применение резервных устройств интерфейса повышают дополнительно живучесть СЭП, поскольку в случае полного отказа какого-либо устройства интерфейса остаются работоспособными остальные устройства, следовательно, исключается отказ СЭП.
Остальные мероприятия направлены на снятие, за строго допустимый промежуток времени питания, с отказавшего элемента устройства интерфейса и предотвращение катастрофического развития отказа. Выполнение этих операций с помощью БПО и использование при этом надежных методов идентификации нарушения обмена между БВС и СЭП по МКО бесспорно снижают вероятность возникновения в СЭП аварийных ситуаций, связанных, прежде всего, с воздействием факторов ТЗЧ и ВЭП КП.
Таким образом, применение предлагаемого способа управления системой электропитания КА повышенной живучести позволяет максимально использовать запасенную емкость АБ и обеспечить питание бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, не допустить необратимого разряда АБ 51…5n в случае нарушения энергобаланса, а также снизить вероятность возникновения аварийной ситуации из-за нарушения связи между системой электропитания и бортовой вычислительной системой, осуществляемой по мультиплексному каналу обмена, и тем самым дополнительно повысить надежность и живучесть функционирования СЭП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С БОЛЬШИМ СРОКОМ АКТИВНОГО СУЩЕСТВОВАНИЯ | 2016 |
|
RU2633997C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2593760C9 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2675590C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ АККУМУЛЯТОРОВ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА (ВАРИАНТЫ) | 2014 |
|
RU2586172C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2537389C1 |
| Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата с большим сроком активного существования | 2016 |
|
RU2611568C1 |
Использование: в области электротехники. Технический результат - повышение надежности и живучести функционирования системы электропитания (СЭП). Способ управления системой электропитания космического аппарата (КА) повышенной живучести, содержащей фотоэлектрическую батарею (БФ), n аккумуляторных батарей (АБ) и по n зарядных и разрядных устройств, заключается в том, что управляют зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения СЭП; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности данной АБ; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности; запрещают работу всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; производят сброс запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности. При этом для связи с бортовой вычислительной системой (БВС), осуществляемой по дублированному магистральному последовательному интерфейсу (мультиплексному каналу обмена), в качестве устройства интерфейса используют оконечное устройство (ОУ) с контроллером. Каждое зарядно-разрядное устройство (ЗРУm) оснащают основным (ОУi-m) и резервным (ОУj-m) оконечными устройствами. С заданной периодичностью опрашивают параметры (массивы) СЭП и идентифицируют отказ (работоспособность) каждого ОУi-m. В качестве критерия отказа ОУ принимают факт появления ошибки обмена. После идентификации отказа ОУi-m в каком-либо ЗРУm программно перезагружают ОУi-m, при этом перезагрузку ОУ выполняют путем перехода на резервное ОУj-m с последующим возвратом на основное ОУi-m. Повторяют последовательность данных операций, в случае парирования отказа ОУi-m обмен продолжают с использованием ОУi-m, в случае повторной идентификации отказа ОУi-m осуществляют программно переход на резервное оконечное устройство ОУj-m, используя соответствующую КУ, последовательность функционирования ОУj-m выбирают аналогичной последовательности функционирования ОУi-m, возврат с ОУj-m на ОУi-m при необходимости выполняют по разовой команде с наземного комплекса управления. 2 ил. 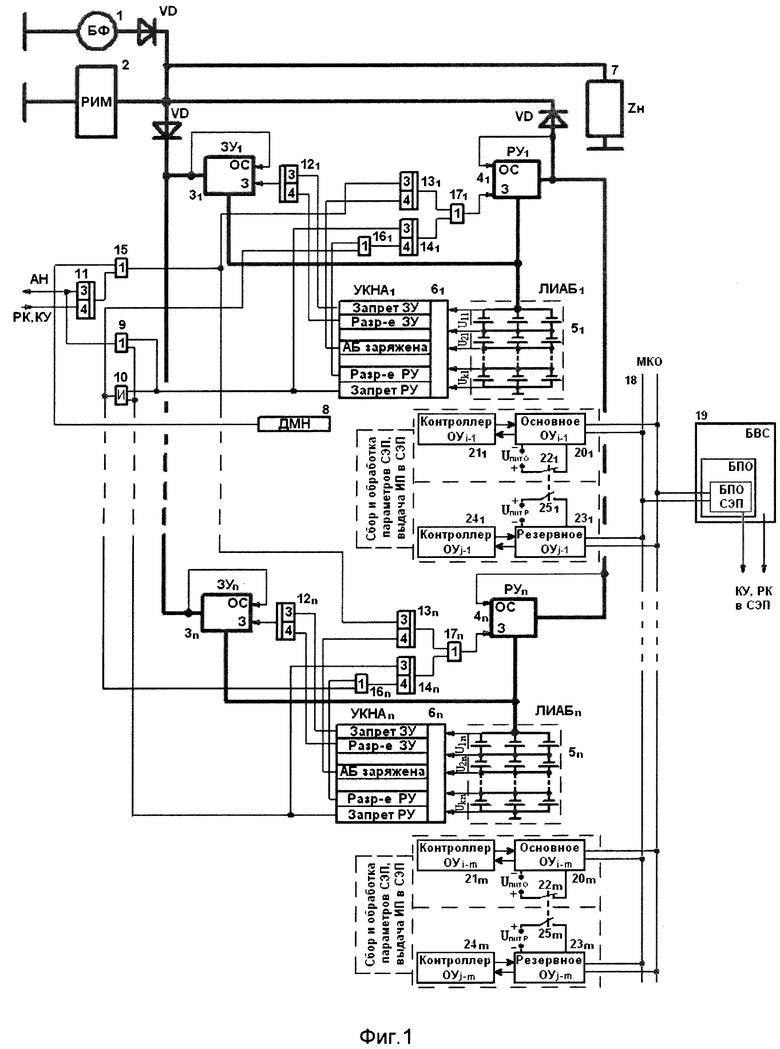
Способ управления системой электропитания космического аппарата (КА) повышенной живучести, содержащей фотоэлектрическую батарею (БФ), n аккумуляторных батарей (АБ) и по n зарядных и разрядных устройств, заключающийся в том, что управляют зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения системы электропитания (СЭП); вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности данной АБ; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности; запрещают работу всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; производят сброс запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности, отличающийся тем, что в системе электропитания для связи с бортовой вычислительной системой (БВС), осуществляемой по дублированному магистральному последовательному интерфейсу (мультиплексному каналу обмена), в качестве устройства интерфейса используют оконечное устройство (ОУ) с контроллером, причем каждое зарядно-разрядное устройство (ЗРУm), состоящее из одного или нескольких зарядных (разрядных) устройств, оснащают основным (ОУi-m) и резервным (ОУj-m) оконечными устройствами; используя алгоритм СЭП из состава бортового программного обеспечения БВС, с заданной периодичностью опрашивают параметры (массивы) СЭП и идентифицируют отказ (работоспособность) каждого ОУi-m; в качестве критерия отказа ОУ принимают факт появления ошибки обмена; после идентификации отказа ОУi-m в каком-либо ЗРУm программно перезагружают ОУi-m, для чего в течение заданного интервала времени формируют в соответствии с алгоритмом СЭП необходимые команды управления (КУ), при этом перезагрузку ОУ выполняют путем перехода на резервное ОУj-m с последующим возвратом на основное ОУi-m; повторяют последовательность данных операций; в случае парирования отказа ОУi-m обмен продолжают с использованием ОУi-m; в случае повторной идентификации отказа ОУi-m осуществляют программно переход на резервное оконечное устройство ОУj-m, используя соответствующую КУ; последовательность функционирования ОУj-m выбирают аналогичной последовательности функционирования ОУi-m; возврат с ОУj-m на ОУi-m при необходимости выполняют по разовой команде с наземного комплекса управления.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| US 2006132093 A1, 22.06.2006. | |||

