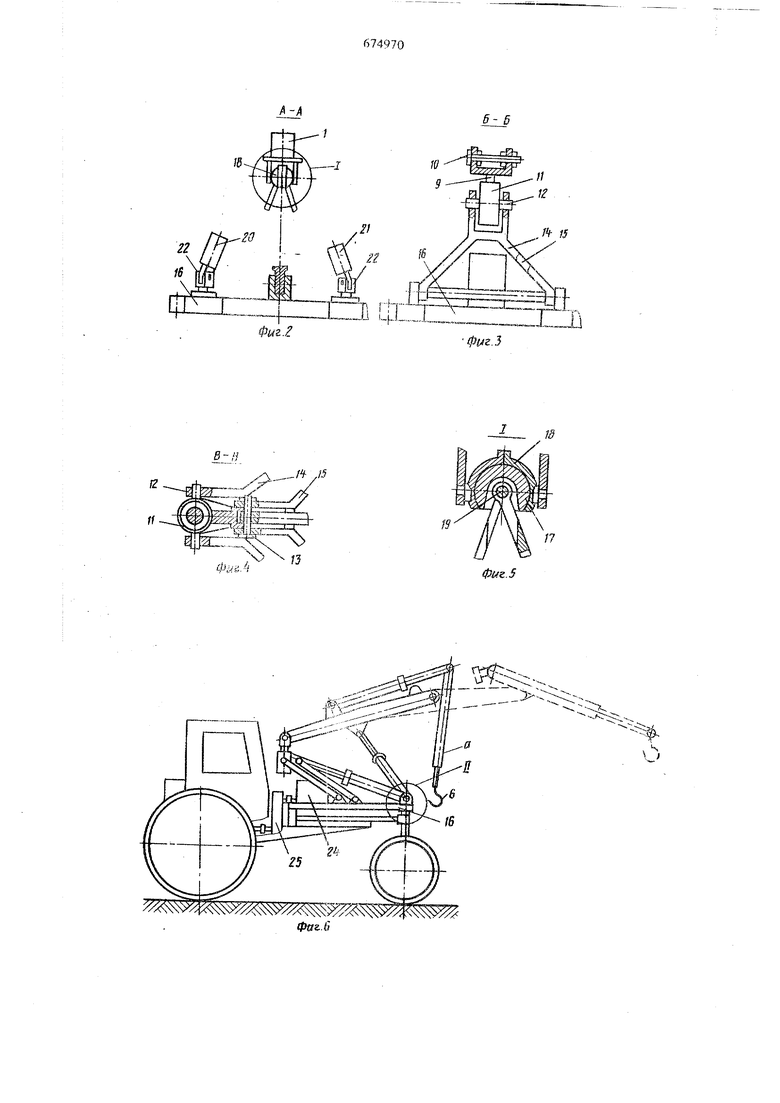
Изобретение относитсй к подъемно-транспортному машиностроению и касается конструирова,ния манипуляторов для проведения грузовьрс работ. Известен манипулятор для проведения грузовых работ, содержащий четырехзвенный параплелограммньш механизм, несущий секционную грузозахватную стрелу, включающую основную секцию с расположенными наклонно к другу силовыми цилиндрами перемещения стрелы ъ вертикальной плоскости и привод силовых цилиндров 11. Цель изобретения - облегчение пространственных перемещений грз озахватной стрелы, уменьшение габаритов и веса. Для этого одно звено параллелограммного ме ханизма выполнено в виде щарнирной опоры с двумя степенями свободы, взаимодействующей со Стрелой, а силовые цилиндры снабжены соответствующими, приводными двигателяш, кинематически связанными между собой, при этом осиовная секция стрелы снабжена поворотной обоймой и щаровой головкой, посредством которой она связана с наклошп 1ми друг к другу силовыми цилиндрами. На фиг. 1 показан предлагаемый манипулятор для проведения грузовых работ, вид сбоку; на фиг. 2-4 - сечение А-А, Б-Б, В-В на фиг. 1 соответственно; на фиг. 5 - узел I на фиг. 2; на фиг. 6 - манипулятор на самоходном транспортном средстве; на фиг. 7 - манипулятор, снабжешп ш колесами-катками (кран-тележка); на фиг. 8 - вид по срелке Г на фиг. 7; на фиг. 9 - узел П на фиг. 6; на фиг. 10, И - сечения Д-Д и Е-Е на фиг. 8 соответственно; на фиг. 12 - принципиальная гидрокинематическая схема манипулятора. Многозвенная грузозахватная стрела маншгуля тора состоит из основной 1 и дополнительной Т секций (см. фиг. 1). Последняя связана со стреловым гидроцил1шдром 3. В дополнительную секцию 2 вмонтирован гидроцилиндр 4 со щтоком 5, воздействующим на несущий грузозахв.тный орган 6. Основная секция 1 стрелы вьшолнена с шарнирными опорами 7 и 8. Опора 7 представляет собой щтыревое приспособление с двумя степенями свободы, включающее консольный
тырь 9 (см. фиг. 3), заканчивающийся вилкой которой помещена ось 10, соединенная со трелой. Корпус 11 этой опоры (фиг. 1, 3, 4) одержит цапфы 12 и ось 13, соединенные с пооротными стойками 14 и 15 соответственно; ротивоположные концы стоек смонтированы а основании 16. Стойки 14 и 15 вместе с корусом 11 опоры 7 и основанием образуют звенья араллелограммного механизма.
В состав опоры 8 входит пустотелая шаровав} 10 оловка 17 (см. фиг. 5), заключенная в поворотную обойму 18, соединенную со стрелой. В стенках шаровой опоры 8 помещена ось 19, с помощью которой монтирутотся гидравлиюские силовые цилиндры 20 и 21. Эти цилиндры рас- 15 положены наклонно относительно друг дрзта и являются опорой и средством для перемещения стрелы как в вертикальной, так и в горизонтальной плоскостях. Цилиндры 20 и 21 посредством щарниров 22 с двумя степенями свободы кре- 20 пятся на основание 16 (см. фнг. 1, 2). В состав манипулятора включен также силовой цилиндр 23 (см. фиг. 1), один конец которого прикреплен ,.-к оси 13, а другой - смонтирован на основании. Цилин,.р 23 предназначен для приведе- 25 ния в действие четырехзвс гаого щарнирно-ры-, чажного механизма, образовшшого основагшем 16, основной секцией 1 стрелы, стойками 14, 15 и цилиндрами 20 и 21 (последние рассматриваются как одно кинетические звено).ЗО
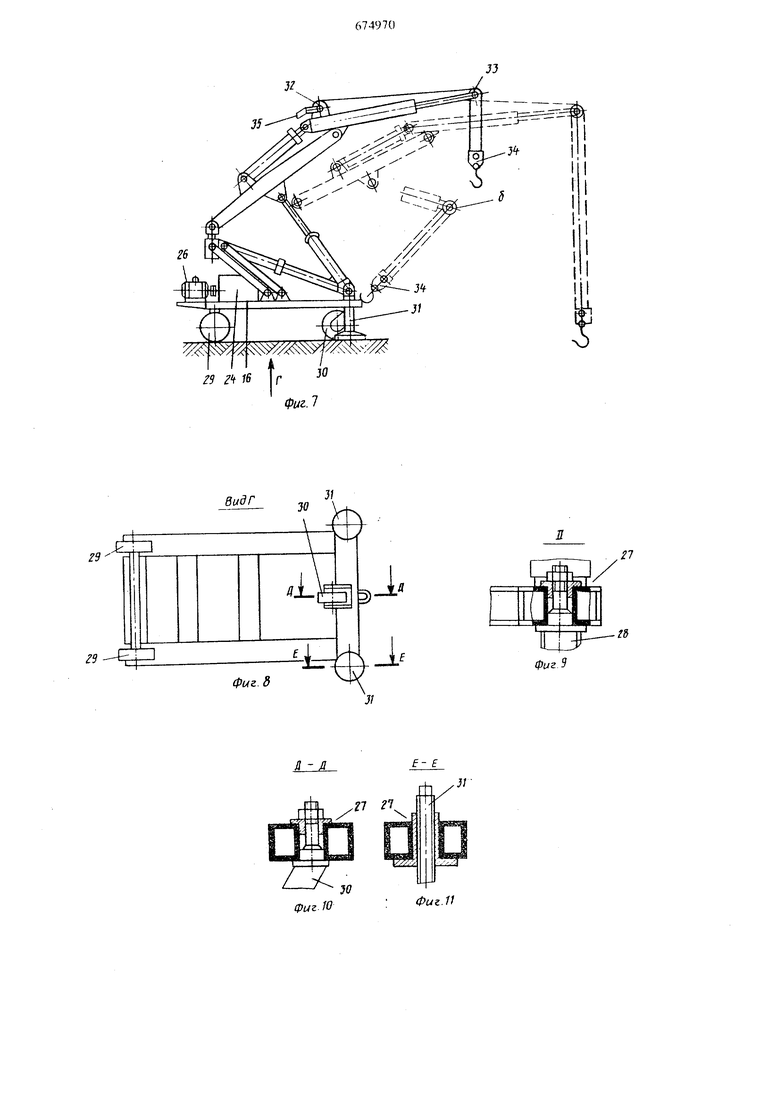
Мшшпулятор приводится в действие от гидросиловой ycTaJiOBKH, смопптровашюй на самоходном транспортном средстве, например на тракторном самоходном шасси (см. фиг. 6) или является несамоходной базой в виде крана-тележки з5 (см. фиг. 7). В первом варишгее гидросиловая установка 24 с помощью, передачи 25 приводится во вращение от вала отбора мощности шасси. Во втором вариш.гге гидросиловая установка снабжена электродвигателем 26. На основанш 40 16, на котором смонтировало все рабочее и силовое оборудование, предусмотрены центрирующие отверстия 27, посредством которых основание устанавливается на штыри 28 самоходного щасси (см. фиг. 9). Шасси снабжено устройством 45 отключающим подвеску на время проведения перегрузочных работ (не показано). В составе крана-тележки центрируюшзие отверстия 27 используются дпй установки неповоротных колескатков 29 (фиг. 7, 8), поворотного колеса 30 §о и ручных домкратов 31. Для обеспечения требуемой высоты подъема груза в этом варианте манипулятор снабжен лебедкой 32, канат которой через блок 33, укрепленный на оголовке стрелы, соединен с подвижной крюковой обоймой 34. Лебедка- приводется во вращение от
гидромотора 35.
Гидросиловая установка крана-тележки включает в себя приводные двигатели-насосы 36 и
37 (см. фиг. 12), которые посредством переда. чи 38 кинематически связаны между собой. В состав установки входят также трехсекционные падрораспределители 39 и 40, соединенные с помощью соответствуюнхих трубопроводов с гидрошшиндрами и гидромотором. Особенностью гидрокинематической схемы является независимое управления силовыми цилиндрами 20 и 21. Каждый из этих цилиндров через гидрораспределитель приводится в действие от одного (своего) насоса. Остальные цилиндры управляются обычным порядком. В варианте самоходного манипулятора одна секция гидрораспределителя 39, соединенная с гидромотором 35, не используется, а передача 38 приводится во вращение от вала отбора мощности.
Манипулятор работает следующим обраэом.
В транспортном положении зветя манипулятора компактно размещены на основании - положения а (см. фиг. 6) и б (см. фиг. 7); в кранетележке оголовок стрелы одновременно является захватным местом для буксировки.
При переводе манипулятора в рабочее положение захватный орган 6 или крюковая обойма 34 отсоединяются от основания 16 и в действие приводится устройство, отключающее подвеску щасси, на несамоходной базе домкраты 31 выдвигаются до упора в грунт (пол здания), исключая перемеще1ше катков 29 и поворотного моста 30. Далее в работу включается гидросиловая установка 24 путем передачи вращения от передачи 25 шасси или электродвигателя 26 к передаче 38 и приводным двигателям-насосам 36 и 37 (см. фиг. 12). При включении в работу соответствующих секций распределителей 39 и 40.рабочая жидкость от насосов- йагнетается по трубопроводам в силовые цилиндры 3, 4, 20, 21, 23 и гидромотор 35.
Первоначально манипулятор выдвигается за счет поворота дополнительной секции 2 стрелы с помощью гидроцилиндра 3, перемещение щтока 5 гидроцилиндром 4 и приведения в действие четырехзвенного механизма путем сокращения рдтгы силового цилиндра 23. В последнем случае основная секция 1 стрелы вместе с дополнительной секцией совершает плоскопараллельное движение, проворачиваясь в и ариирах 7 и 8, при этом силовые цилиндры 20 и 21 разворачиваются как одно целое, а поворотные стойки 14 и 15, являющиеся звеньями параллелограммного механизма, посредством цапф 12 и оси 13 несут на себе корпус 11 шарнира 7, сохраняя вертикальное положение его штыря 9.
Поиск и захват груза .производится сочетанием работы силовых цилиндров 20, 21, 3 и 4. Пр подаче рабочей жидкости в одноименные полости цил1ивдров 20 и 21 происходит одновременное перемещецие в одном направлении штоков
обоих 1шлиндров и стрела разворачивает в вертикальной плоскости. При работе только одного из этих цилиндров .стрела разворачивается как в вертикальной, так и в горизонтальной плос- . кости, Если шток одного цилиндра 20 или 21 перемещается в одном направлении, а шток другого цилиндра - в противоположном направлении, то стрела разворачивается практически горизонтально. Манипулируя рукоятками распределителей 39 и 40, управляют цилиндрами. Поскольку оба насоса 36 и 37 постоянно находятся в работе, то в случае, если один из цилиндров не включен, жидкость от соответствз ощего распределителя направляется на слив. При такой схеме управления цилиндрами 20 и 21 достигается их параллельная и независимая работа. Наличие двух параллельных потоков мощности обеспечивает также совмещение операций при работе других потребителей-цилиндров 3, 4, 23 и гидромотора 35.
При работе манипулятора изменяются утлы наклона каждого цилиндра 20 и 21 относительно основания 16, угол между зтими цилиндрами, а также между плоскостью цилиндров и стрелой 1. В зтом случае цилшздры поворачиваются в элементах шарниров 22 в двух взаимно перпендикулярных направлениях. Штоки этих цилиндров поворачиваются относительно друг друга в опоре 8 на оси 19 (фиг. 5); последняя захватывает шаровую головку 17 и поворачивает ее от- . иосительно обоймы 18, которая, в свою очередь, разворачивается относительно стрелы. При повороте стрелы в горизонтальной плоскости, дополнительно к этому, шаровая головка 17 поворачивается относительно обоймы 18 в другом направлении. В опоре 8, таким образом, реализуются четыре степени свободы. При пространственном перемещении стрелы в двух измерениях, она, разворачиваясь на оси 10, увлекает за собой
штырь 9, который поворачивается относительно опоры 7.
. В составе крана-тележки дополнительно приводится в действие механизм вертикального перемещения груза - при включении в работу гидромотора 35 канат лебедки 32 через блок 33 производит подъем (опускание) крюковой подвески 34. После окончания работ манипулятор демонтируется с транспортаого средства, центрирующие отверстия 27 выводятся из зацепления со штырями 28, передача -25 шасси отсоединяется от гидросиловой установки 24 и тракторное шасси освобождается для других работ.
Формула изобретения
. Манипулятор для проведения грузовых работ, содержащий четырехзвенньга параллелограммный меха1шзм, несущий секционную грузозахватную стрелу, включающую основную секцию . с расположенными наклонно друг к другу силовыми цилиндрами перемещения стрелы в вертикальной плоскости и привод силовых цилиндров, отличающийся тем, что, с целью облегчения пространственных перемещений грузозахватной,стрелы, уменьшения габаритов и веса, одно звено параллелограммного меха дазма выполнено в виде шарнирной опоры с двумя степенями свобода, взаимодействующей со стрелой, а силовые цилиндры снабжены соответствующими приводными двигателями, кинематически связанными между собой, при этом основная секция стрелы снабжена поворотной обоймой и шаровой гряовкрй, посредством которой она связана с наклонными друг k другу цилиндрами.
Источники информации, принятые во внимание при экспертизе
1. Патент Франции № 2265665, кл, В 21 3 5/00, 1974.
674970


| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Режущий инструмент | 1975 |
|
SU674841A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| Грузоподъемный кран | 1976 |
|
SU594021A1 |
| Передвижное грузоподъемное устройство | 1982 |
|
SU1102768A1 |
| КРАН-МАНИПУЛЯТОР | 2000 |
|
RU2167804C1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |

A-/J
/a.f
.З
B-ff
fi- J5
ФнёА
фuг.S
.
О
Ф«ге.5
J
за
/
Фиг. 7
31
видГ
30
л.
Z9
,L
гэ
фиг. 8
Li-A. 27
Д
L.
Е- Е
ЛГ
7 21
.//
фиг. 1г
