Изобретение относится к области техники радиотехнических средств измерения расстояния и может быть использовано, например, для измерения малых дальностей в локальных навигационных системах при управлении движением подводных объектов.
Известны амплитудные способы измерения дальности (см., например, кн. Справочник по основам радиолокационной техники / под ред. В.В. Дружинина. – М.: Воен. Издат., 1967). Однако амплитудные способы измерения дальности имеют большую погрешность.
Наиболее близким по технической сущности к предлагаемому изобретению является способ измерения дальности, описанный в Патенте на изобретение №2657016 Россия, МПК G01S 15/08, опубл. 08.06.2018, Бюл. № 16.
По этому способу измерения дальности в измерительной станции первоначально генерируют непрерывные колебания с известной фиксированной частотой  . При этом непрерывные колебания подают одновременно на вход передающей рамочной магнитной антенны и на вход передающего акустического преобразователя, оба из которых располагают на одном конце измерительной трассы. Таким образом, излучают в направлении объекта, расстояние до которого необходимо измерить, одновременно переменное магнитное поле и акустическую волну. На другом конце измерительной трассы переменное магнитное поле улавливают приемной рамочной магнитной антенной, а акустическую волну улавливают приемным акустическим преобразователем, оба из которых располагают на другом конце измерительной трассы. При этом измеряют и фиксируют разность фаз
. При этом непрерывные колебания подают одновременно на вход передающей рамочной магнитной антенны и на вход передающего акустического преобразователя, оба из которых располагают на одном конце измерительной трассы. Таким образом, излучают в направлении объекта, расстояние до которого необходимо измерить, одновременно переменное магнитное поле и акустическую волну. На другом конце измерительной трассы переменное магнитное поле улавливают приемной рамочной магнитной антенной, а акустическую волну улавливают приемным акустическим преобразователем, оба из которых располагают на другом конце измерительной трассы. При этом измеряют и фиксируют разность фаз  между непрерывными колебаниями, формируемыми на выходе приемной рамочной магнитной антенны и на выходе приемного акустического преобразователя. После чего генерируют непрерывные колебания с известной фиксированной частотой
между непрерывными колебаниями, формируемыми на выходе приемной рамочной магнитной антенны и на выходе приемного акустического преобразователя. После чего генерируют непрерывные колебания с известной фиксированной частотой  и повторяют всю процедуру излучения, приема переменного магнитного поля и акустической волны, а также измеряют и фиксируют разность фаз
и повторяют всю процедуру излучения, приема переменного магнитного поля и акустической волны, а также измеряют и фиксируют разность фаз  между непрерывными колебаниями, формируемыми на выходе приемной рамочной магнитной антенны и на выходе приемного акустического преобразователя. При этом определяют разность фаз
между непрерывными колебаниями, формируемыми на выходе приемной рамочной магнитной антенны и на выходе приемного акустического преобразователя. При этом определяют разность фаз  , при этом расстояние между передающим акустическим преобразователем и приемным акустическим преобразователем определяют по формуле:
, при этом расстояние между передающим акустическим преобразователем и приемным акустическим преобразователем определяют по формуле:
 ,
,
где  – скорость звука в среде распространения, причем место размещения передающей и приемной рамочных магнитных антенн не имеет значения.
– скорость звука в среде распространения, причем место размещения передающей и приемной рамочных магнитных антенн не имеет значения.
Однако указанный способ дает адекватные показания дальности, если измерения проводятся на достаточной глубине, где среду распространения акустических колебаний можно считать стационарной. При проведении измерений в верхних слоях водной среды, вблизи ее поверхности, присутствующее волнение водной поверхности вносит определенную составляющую ошибки измерений. Это связано с тем, что постоянное изменение состояния водной поверхности приводит к постоянному изменению интерференционной картины в точке приема акустических колебаний, связанных с тем, что путь прохождения акустической волны, отражающейся от водной поверхности, постоянно меняется, меняется суммарная фаза принятого и преобразованного в напряжение сигнала. Другими словами к стационарному набегу фазы акустических колебаний собственно между акустическими преобразователями, обусловленных изменением частоты возбуждающего сигнала, добавляется (со знаком плюс или минус) нестационарное изменение фазы акустических колебаний, вызываемых отражением этих колебаний от взволнованной водной поверхности. Это вызывает появление ошибки измерения дальности. Кроме того, последовательное во времени изменение частоты колебаний затягивает сам процесс определения дальности.
Целью настоящего изобретения является устранения ошибки измерения дальности под водой, обусловленной отражением акустических колебаний от нестационарной водной поверхности, а также сокращение во времени процесса измерений.
Поставленная цель достигается тем, что по способу измерения дальности под водой одновременно генерируют непрерывные электрические колебания с известными двумя фиксированными частотами и , которые суммируют и подают одновременно на вход передающей рамочной магнитной антенны и на вход передающего акустического преобразователя, оба из которых располагают на одном конце измерительной трассы, и излучают, таким образом, в направлении объекта, расстояние до которого необходимо измерить, одновременно комбинированное переменное магнитное поле и комбинированную акустическую волну, после чего на другом конце измерительной трассы комбинированное переменное магнитное поле улавливают приемной рамочной магнитной антенной, а комбинированную акустическую волну улавливают приемным акустическим преобразователем, оба из которых располагают на другом конце измерительной трассы, после чего комбинированный сигнал с выхода рамочной магнитной антенны подают на входы двух узкополосных фильтров, настроенных на частоты и , на выходах которых получают раздельные сигналы с частотами и , при этом комбинирований сигнал с выхода приемного акустического преобразователя также подают на входы двух других узкополосных фильтров, настроенных на частоты и , на выходах которых также получают раздельные сигналы с частотами и , после чего измеряют разности фаз и между непрерывными колебаниями с одинаковыми частотами и , получаемых попарно на выходах всех узкополосных фильтров, после чего определяют разность фаз , при этом расстояние между передающим акустическим преобразователем и приемным акустическим преобразователем определяют по формуле:
 ,
,
где — скорость звука в среде распространения, причем место размещения передающей и приемной рамочных магнитных антенн не имеет значения; время измерений сокращается.
Сравнение предлагаемого изобретения с уже известными способами и прототипом показывает, что заявляемый способ проявляет новые технические свойства, заключающиеся в возможности высокоточного измерения дальности под водой, как на глубине, так и вблизи нестационарной водной поверхности. Кроме того время измерений сокращается.
Эти свойства предлагаемого изобретения являются новыми, так как в способе прототипе в силу присущих ему недостатков, заключающихся в появлении ошибки измерения дальности, обусловленной наличием нестационарной волны отраженной от взволнованной водной поверхности, измерить дальность между двумя подводными объектами, находящихся вблизи водной поверхности, не представляется возможным. Процесс измерений по способу прототипу предполагает последовательное во времени изменение частоты, что увеличивает само время измерений.
Указанный способ измерения дальности под водой можно реализовать с помощью устройства, приведенного на фигуре.
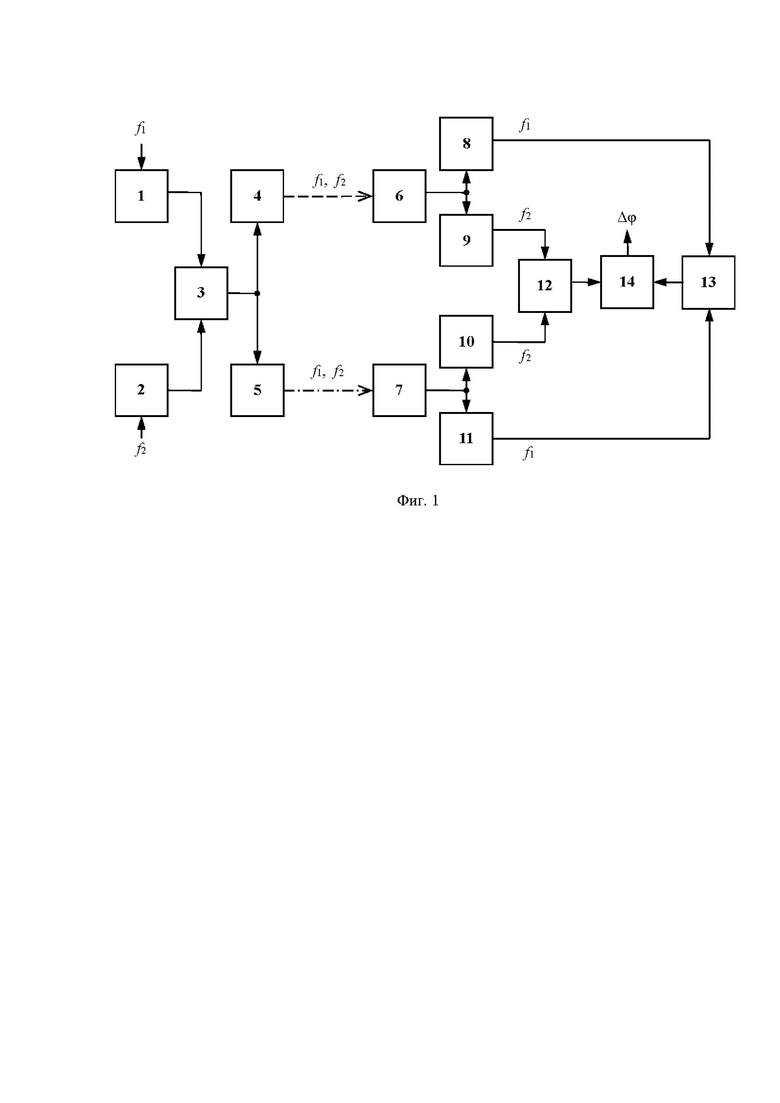
Устройство измерения дальности под водой состоит из первого генератора непрерывных колебаний 1, второго генератора непрерывных колебаний 2, сумматора колебаний 3, передающей рамочной магнитной антенны 4, передающего акустического преобразователя 5, приемной рамочной магнитной антенны 6, приемного акустического преобразователя 7, первого узкополосного фильтра 8, второго узкополосного фильтра 9, третьего узкополосного фильтра 10, четвертого узкополосного фильтра 11, первого измерителя разности фаз 13, второго измерителя разности фаз 12, третьего измерителя разности фаз 14.
Выход генератора непрерывных колебаний 1 соединен с первым входом сумматора колебаний 3, а выход генератора непрерывных колебаний 2 соединен со вторым входом сумматора колебаний 3, выход которого соединен с входом передающей рамочной магнитной антенны 4 и со входом передающего акустического преобразователя 5, при этом выход приемной рамочной магнитной антенны 6 соединен с входом первого узкополосного фильтра 8 и с входом второго узкополосного фильтра 9, при этом выход приемного акустического преобразователя 7 соединен с входом третьего узкополосного фильтра 10 и с входом четвертого узкополосного фильтра 11, при этом выход первого узкополосного фильтра 8 соединен с первым входом первого измерителя разности фаз 13, а выход второго узкополосного фильтра 9 соединен с первым входом второго измерителя разности фаз 12, при этом выход третьего узкополосного фильтра 10 соединен со вторым входом второго измерителя разности фаз 12, а выход четвертого узкополосного фильтра 11 соединен со вторым входом первого измерителя разности фаз 13, при этом выход первого измерителя разности фаз 13 соединен с первым входом третьего измерителя разности фаз 14, а выход второго измерителя разности фаз 12 соединен со вторым входом третьего измерителя разности фаз 14.
Работает устройство, реализующее заявляемый способ измерения дальности под водой следующим образом.
С помощью генератора непрерывных колебаний 1 генерируют непрерывные колебания с известной частотой  , начальной фазой
, начальной фазой  и амплитудой
и амплитудой 
 (1)
(1)
С помощью генератора непрерывных колебаний 2 генерируют непрерывные колебания с известной частотой  , начальной фазой
, начальной фазой  и амплитудой
и амплитудой
 (2)
(2)
Частоты этих колебаний выбирают невысокими. Значения частот этих колебаний лежат в звуковом или ультразвуковом диапазоне длин волн. Эти колебания с выходов обоих генераторов непрерывных колебаний 1 и 2 подают на входы сумматора колебаний 3, и далее сигнал суммы этих колебаний подают на вход передающей рамочной магнитной антенны 4 и на вход передающего акустического преобразователя 5.
С помощью передающей рамочной магнитной антенны 4 излучают в направлении другого конца измерительной трассы электромагнитные волны. Электромагнитные волны с частотами  и
и  при распространении на расстояние
при распространении на расстояние  от передающей рамочной магнитной антенны 4 до приемной рамочной магнитной антенны 6 получают набеги фазы
от передающей рамочной магнитной антенны 4 до приемной рамочной магнитной антенны 6 получают набеги фазы  и
и  , и где
, и где  — скорость света. При низких частотах и звукового или ультразвукового длин волн и при малых дальностях
— скорость света. При низких частотах и звукового или ультразвукового длин волн и при малых дальностях  , составляющих до сотни метров, длины волн электромагнитных колебаний оказываются много больше измеряемой дальности
, составляющих до сотни метров, длины волн электромагнитных колебаний оказываются много больше измеряемой дальности  . Другими словами передающая и приемная рамочные магнитные антенны работают в ближней зоне и их результирующее излучаемое (принимаемое) электромагнитное поле является преимущественно переменным магнитным полем. При этом набегами фазы
. Другими словами передающая и приемная рамочные магнитные антенны работают в ближней зоне и их результирующее излучаемое (принимаемое) электромагнитное поле является преимущественно переменным магнитным полем. При этом набегами фазы  и
и  можно пренебречь и можно утверждать, что непрерывные колебания (отдельно на частоте и отдельно на частоте ), формируемые на выходе приемной рамочной магнитной антенны 8, являются попарно синфазными, по отношению к непрерывным колебаниям, поступающим на вход передающей рамочной магнитной антенны 4 и описываются одним и тем же выражением (1) и (2). Причем место установки передающей и приемной рамочных магнитных антенн не принципиально. Непрерывные колебания на входе передающей и на выходе приемной рамочных магнитных антенн всегда будут синфазны или противофазны (в зависимости от их взаимной ориентации), как это имеет место в случае использования двух катушек индуктивностей (те же рамочные магнитные антенны) с взаимной индуктивной (магнитной) связью. Правомерность использования взаимной магнитной связи двух рамочных магнитных антенн подтверждена полномасштабными теоретическими и экспериментальными исследованиями и нашла отражение в трудах и патентах РФ автора №№ 2584977, 2584978, 2584979, 2584980, 2584981, 2584982, 2584983 и др.
можно пренебречь и можно утверждать, что непрерывные колебания (отдельно на частоте и отдельно на частоте ), формируемые на выходе приемной рамочной магнитной антенны 8, являются попарно синфазными, по отношению к непрерывным колебаниям, поступающим на вход передающей рамочной магнитной антенны 4 и описываются одним и тем же выражением (1) и (2). Причем место установки передающей и приемной рамочных магнитных антенн не принципиально. Непрерывные колебания на входе передающей и на выходе приемной рамочных магнитных антенн всегда будут синфазны или противофазны (в зависимости от их взаимной ориентации), как это имеет место в случае использования двух катушек индуктивностей (те же рамочные магнитные антенны) с взаимной индуктивной (магнитной) связью. Правомерность использования взаимной магнитной связи двух рамочных магнитных антенн подтверждена полномасштабными теоретическими и экспериментальными исследованиями и нашла отражение в трудах и патентах РФ автора №№ 2584977, 2584978, 2584979, 2584980, 2584981, 2584982, 2584983 и др.
С другой стороны, с помощью передающего акустического преобразователя 5 излучают в направлении другого конца измерительной трассы акустические волны с частотами и , которые принимают приемным акустическим преобразователем 7. Акустическая волна с частотой при распространении на расстояние  от передающего акустического преобразователя 5 до приемного акустического преобразователя 7 также получает свой набег фазы
от передающего акустического преобразователя 5 до приемного акустического преобразователя 7 также получает свой набег фазы  , где
, где  — скорость звука в среде распространения. Акустическая волна с частотой
— скорость звука в среде распространения. Акустическая волна с частотой  при распространении на расстояние от передающего акустического преобразователя 5 до приемного акустического преобразователя 7 также получает свой набег фазы
при распространении на расстояние от передающего акустического преобразователя 5 до приемного акустического преобразователя 7 также получает свой набег фазы  . Значениями этих набегов фаз пренебречь нельзя, поскольку их величины могут достигать нескольких тысяч фазовых циклов величиной
. Значениями этих набегов фаз пренебречь нельзя, поскольку их величины могут достигать нескольких тысяч фазовых циклов величиной  каждый. Сумму электрических сигналов на выходе приемного акустического преобразователя подают на вход третьего узкополосного фильтра 10 и одновременно на вход четвертого узкополосного фильтра 11. На выходах этих фильтров получают непрерывные колебания, на выходе четвертого узкополосного фильтра 11 колебания с частотой
каждый. Сумму электрических сигналов на выходе приемного акустического преобразователя подают на вход третьего узкополосного фильтра 10 и одновременно на вход четвертого узкополосного фильтра 11. На выходах этих фильтров получают непрерывные колебания, на выходе четвертого узкополосного фильтра 11 колебания с частотой  , а на выходе третьего узкополосного фильтра 10 колебания с частотой . Таким образом, на выходе третьего узкополосного фильтра 10 получают непрерывные колебания
, а на выходе третьего узкополосного фильтра 10 колебания с частотой . Таким образом, на выходе третьего узкополосного фильтра 10 получают непрерывные колебания
 (3)
(3)
а на выходе четвертого узкополосного фильтра 11 получают непрерывные колебания
 (4)
(4)
Непрерывные колебания с выхода первого узкополосного фильтра 8, описываемые выражением (1) и с выхода четвертого узкополосного фильтра 11, описываемые выражением (4), подают на входы первого измерителя разности фаз 13, на выходе которого формируют сигнал, пропорциональный разности фаз сигналов (1) и (4)  . Непрерывные колебания с выхода второго узкополосного фильтра 9, описываемые выражением (2) и с выхода третьего узкополосного фильтра 10, описываемые выражением (3), подают на входы второго измерителя разности фаз 12, на выходе которого формируют сигнал, пропорциональный разности фаз сигналов (2) и (3)
. Непрерывные колебания с выхода второго узкополосного фильтра 9, описываемые выражением (2) и с выхода третьего узкополосного фильтра 10, описываемые выражением (3), подают на входы второго измерителя разности фаз 12, на выходе которого формируют сигнал, пропорциональный разности фаз сигналов (2) и (3)  . Сигналы с выходов первого и второго измерителя разности фаз подают на входы третьего измерителя разности фаз 14, на выходе которого получают сигнал, пропорциональный , при этом расстояние между передающим акустическим преобразователем и приемным акустическим преобразователем определяют по формуле
. Сигналы с выходов первого и второго измерителя разности фаз подают на входы третьего измерителя разности фаз 14, на выходе которого получают сигнал, пропорциональный , при этом расстояние между передающим акустическим преобразователем и приемным акустическим преобразователем определяют по формуле
Важно при этом помнить, что разность частот  не должна приводить к изменению разности фаз сигналов на величину бóльшую, чем . Другими словами
не должна приводить к изменению разности фаз сигналов на величину бóльшую, чем . Другими словами
При этом надо понимать, что излучение и прием как электромагнитных, так и акустических колебаний с двумя различными частотами осуществляется одновременно. Все измерения осуществляются в один и тот же момент времени. Соответственно время измерений и собственно определение дальности сокращается, что выгодно отличает предлагаемое изобретение от известных аналогов.
Народнохозяйственный эффект от использования предлагаемого изобретения связан с появлением возможности измерения дальности под водой между двумя объектами, находящимися как на глубине, где имеют место стационарные набеги фазы акустических колебаний собственно между акустическими преобразователями, так и вблизи взволнованной водной поверхности, где имеют место нестационарные изменения набегов фаз, обусловленные отражениями акустических колебаний от взволнованной водной поверхности. Повышение эффективности от использования предлагаемого изобретения связано с возможностью измерения дальности с повышенной точностью, при этом неоднозначность измерений исключается. Другой аспект повышения эффективности предлагаемого изобретения связан с сокращением времени измерений, что существенно улучшает тактико-технические характеристики реализуемого по указанному способу устройства.
Способ измерения дальности под водой относится к области техники радиотехнических средств измерения расстояний и может быть использован, например, для измерения малых дальностей в локальных навигационных системах при управлении движением подводных объектов. Новым в способе измерения дальности является генерирование одновременно двух непрерывных колебаний с двумя различными частотами, которые суммируют и подают одновременно на вход передающей рамочной магнитной антенны и на вход передающего акустического преобразователя. На выходе приемной рамочной магнитной антенны устанавливают два узкополосных фильтра, которые выделяют колебания по отдельности, каждое колебание со своей из указанных выше частот. Такие же фильтры устанавливают на выходе приемного акустического преобразователя, где также выделяют по отдельности колебания также со своей из указанных выше частот. После чего измеряют попарно разности фаз между колебаниями с одинаковыми частотами и наконец определяют разность фаз между этими измеренными ранее разностями фаз, по которой собственно определяют дальность. Одновременное излучение и прием колебаний с различными частотами позволят не принимать во внимание изменяющуюся во времени интерференционную картину в точке приема акустических колебаний, вызванную отражением акустических колебаний от водной поверхности, на которой обычно присутствует волнение, изменяющееся во времени. Время обработки результатов измерений сокращается, что также существенно улучшает характеристики процесса определения дальности. 1 ил.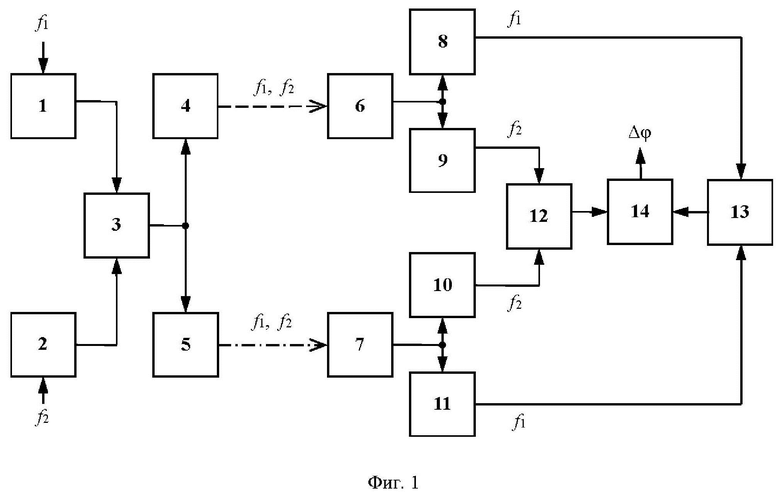
Способ измерения дальности под водой, характеризующийся тем, что одновременно генерируют непрерывные электрические колебания с известными двумя фиксированными частотами  и
и  , которые суммируют и подают одновременно на вход передающей рамочной магнитной антенны и на вход передающего акустического преобразователя, оба из которых располагают на одном конце измерительной трассы, и излучают, таким образом, в направлении объекта, расстояние до которого необходимо измерить, одновременно комбинированное переменное магнитное поле и комбинированную акустическую волну, после чего на другом конце измерительной трассы комбинированное переменное магнитное поле улавливают приемной рамочной магнитной антенной, а комбинированную акустическую волну улавливают приемным акустическим преобразователем, оба из которых располагают на другом конце измерительной трассы, после чего комбинированный сигнал с выхода рамочной магнитной антенны подают на входы двух узкополосных фильтров, настроенных на частоты и , на выходах которых получают раздельные сигналы с частотами и , при этом комбинирований сигнал с выхода приемного акустического преобразователя также подают на входы двух других узкополосных фильтров, настроенных на частоты и , на выходах которых также получают раздельные сигналы с частотами и , после чего измеряют разности фаз
, которые суммируют и подают одновременно на вход передающей рамочной магнитной антенны и на вход передающего акустического преобразователя, оба из которых располагают на одном конце измерительной трассы, и излучают, таким образом, в направлении объекта, расстояние до которого необходимо измерить, одновременно комбинированное переменное магнитное поле и комбинированную акустическую волну, после чего на другом конце измерительной трассы комбинированное переменное магнитное поле улавливают приемной рамочной магнитной антенной, а комбинированную акустическую волну улавливают приемным акустическим преобразователем, оба из которых располагают на другом конце измерительной трассы, после чего комбинированный сигнал с выхода рамочной магнитной антенны подают на входы двух узкополосных фильтров, настроенных на частоты и , на выходах которых получают раздельные сигналы с частотами и , при этом комбинирований сигнал с выхода приемного акустического преобразователя также подают на входы двух других узкополосных фильтров, настроенных на частоты и , на выходах которых также получают раздельные сигналы с частотами и , после чего измеряют разности фаз  и
и  между непрерывными колебаниями с одинаковыми частотами и , получаемых попарно на выходах всех узкополосных фильтров, после чего определяют разность фаз
между непрерывными колебаниями с одинаковыми частотами и , получаемых попарно на выходах всех узкополосных фильтров, после чего определяют разность фаз  , при этом расстояние между передающим акустическим преобразователем и приемным акустическим преобразователем определяют по формуле:
, при этом расстояние между передающим акустическим преобразователем и приемным акустическим преобразователем определяют по формуле:
 ,
,
где  – скорость звука в среде распространения, причем место размещения передающей и приемной рамочных магнитных антенн не имеет значения, и время измерений сокращается.
– скорость звука в среде распространения, причем место размещения передающей и приемной рамочных магнитных антенн не имеет значения, и время измерений сокращается.
| Способ измерения дальности | 2017 |
|
RU2657016C1 |
| Li Zhou, A Precise Underwater Acoustic Positioning Method Based on Phase Measurement, B | |||
| Eng., Northwestern Polytechnical University, 1996, M | |||
| Eng., Northwestern Polytechnical University, 1999, A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of MASTER OF APPLIED SCIENCE in the Department of | |||

