Изобретение относится к области техники радиотехнических средств позиционирования, основано на измерениях расстояний под водой и может быть использовано, например, для позиционирования надводных/подводных объектов в локальных навигационных системах при управлении их движением.
Известны амплитудные способы измерения дальности (см., например, кн. Справочник по основам радиолокационной техники / под ред. В. В. Дружинина. — М.: Воен. Издат, 1967). Однако амплитудные способы измерения дальности имеют большую погрешность.
Наиболее близким по технической сущности к предполагаемому изобретению является способ измерения дальности, с его модификациями, описанный в Патентах на изобретение № 2657016, № 2679000 и № 2697861 Россия, МПК G01S 15/08, G01S 13/32, СПК G01S 15/08.
По способу измерения дальности, описанному в патенте № 2679000 в измерительной станции генерируют непрерывные электрические колебания с известной фиксированной частотой 




где 
Однако указанный способ измерения дальности может быть реализован на ограниченных дистанциях, и между одной измерительной станцией и одним контролируемым объектом. Ограниченная дальность действия определяется быстрым затуханием переменного магнитного поля при его распространении на известное расстояние. Степень затухания переменного магнитного поля обратно пропорциональна кубу расстояния распространения. При ограниченной и приемлемой энергетике этой линии связи, задаваемой напряженностью излученного переменного магнитного поля, определяемой, в свою очередь, мощностью передатчика и параметрами передающей рамочной магнитной антенны измерительной станции, а также параметрами приемной рамочной магнитной антенной и чувствительностью приемника ретрансляторной станции, расстояние, на котором можно уловить и использовать по назначению переменное магнитное поле исчисляется сотней метров или около того. Кроме того, для прохода по заданному фарватеру необходимо контролировать расстояния до нескольких реперных точек, которые могут быть расположены друг от друга на расстояниях много больше, чем сотня метров. Длина контролируемого фарватера может исчисляться километром и более. Таким образом, использовать описанный способ измерения дальности для позиционирования надводного/подводного объекта при его проходе по заданному фарватеру не представляется возможным.
Целью настоящего изобретения является реализация возможности позиционирования надводного/подводного объекта при его проходе по заданному фарватеру. Поставленная цель достигается тем, что по способу позиционирования надводного/подводного объекта при его проходе по заданному фарватеру первоначально на измерительной станции контролируемого объекта генерируют непрерывные электрические колебания с известной фиксированной звуковой частотой 




где 





после чего на измерительной станции генерируют непрерывные электрические колебания с третьей субтоновой частотой 



Сравнение предполагаемого изобретения с уже известными способами и прототипом показывает, что заявляемый способ проявляет новые технические свойства, заключающиеся в возможности позиционирования надводного/подводного объекта при его проходе по заданному фарватеру, причем позиционирование осуществляют в реальном масштабе времени.
Эти свойства предполагаемого изобретения являются новыми, так как в способе прототипе в силу присущих ему недостатков, произвести позиционирование надводного/подводного объекта при его проходе по заданному фарватеру, описываемым в прототипе способом по всей длине фарватера, не представляется возможным.
Указанный способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру можно реализовать с помощью устройства, показанного на фиг. 1.
Устройство позиционирования надводного/подводного объекта при его проходе по заданному фарватеру состоит из генератора непрерывных колебаний звуковой частоты 1, генератора непрерывных колебаний субтоновой частоты 2, амплитудного модулятора 3, передающей рамочной магнитной антенны 4, приемного акустического преобразователя измерительной станции 5, измерителя разности фаз 6, приемных рамочных магнитных антенн 7, 8, 9,…M, сумматора сигналов приемных рамочных магнитных антенн 10, усилителя-ограничителя сигналов звуковой частоты 11, демодулятора 12, частотного дискриминатора 13, управляемых электронных ключей 14, 15, 16,…, 14+N, передающих акустических преобразователей ретрансляторных станций 17, 18, 19,…, 17+ N.
Выход генератора непрерывных колебаний звуковой частоты 1 соединен с сигнальным входом амплитудного модулятора 3 и с первым входом измерителя разности фаз 6, при этом модуляционный вход амплитудного модулятора 3 соединен с выходом генератора непрерывных колебаний субтоновой частоты 2, при этом выход амплитудного модулятора 3 соединен с входом передающей рамочной магнитной антенны 4, при этом выход приемного акустического преобразователя измерительной станции 5 соединен со вторым входом измерителя разности фаз 6, причем выходы приемных рамочных магнитных антенн 7, 8, 9,…M соединены с соответствующими входами сумматора сигналов приемных рамочных магнитных антенн 10, выход которого соединен с входом усилителя-ограничителя сигналов низкой звуковой частоты 11 и с входом демодулятора 12, выход которого соединен с входом частотного дискриминатора 13, причем выход усилителя-ограничителя сигналов низкой звуковой частоты 11 соединен с сигнальными входами управляемых электронных ключей 14, 15, 16,…, 14+N, причем выходы частотного дискриминатора 13 соединены с соответствующими входами управления электронных ключей 14, 15, 16,…, 14+N, выходы которых соединены с соответствующими входами передающих акустических преобразователей ретрансляционных станций 17, 18, 19,…, 17+ N.
Работает устройство, реализующее заявляемый способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру следующим образом.
С помощью генератора непрерывных электрических колебаний звуковой частоты 1, устанавливаемого на измерительной станции, первоначально генерируют непрерывные колебания с известной звуковой частотой 



Частота этих колебаний выбирается невысокой. Значение частоты этих колебаний лежит в звуковом или ультразвуковом диапазоне длин волн. Эти колебания подают на первый вход измерителя разности фаз 6 и одновременно на сигнальный вход амплитудного модулятора 2, на вход модуляции которого подают сигнал модуляции субтоновой частоты

В результате получают модулированный сигнал

где 
Модулированный сигнал подают на вход передающей рамочной магнитной антенны 4, устанавливаемой на измерительной станции. С помощью передающей рамочной магнитной антенны 4 измерительной станции излучают в направлении приемных рамочных магнитных антенн 7, 8, 9,…M переменное магнитное поле. При низких частотах 
Непрерывные колебания на входе передающей и на выходах приемных рамочных магнитных антенн всегда будут синфазны или противофазны (в зависимости от их взаимной ориентации), как это имеет место в случае использования двух катушек индуктивностей (те же рамочные магнитные антенны) с взаимной индуктивной (магнитной) связью.
Поскольку электрические сигналы на выходах приемных рамочных магнитных антенн синфазны, то нет препятствий для их простого сложения в сумматоре сигналов приемных рамочных магнитных антенн 10. Таким образом, если хотя бы на выходе одной из приемных рамочных магнитных антенн, или на выходах сразу нескольких рамочных магнитных антенн наводятся электрические колебания звуковой частоты, то эти колебания появляются на выходе сумматора сигналов приемных рамочных магнитных антенн 10 с той или иной амплитудой, и эти электрические колебания будут синфазны исходным колебаниям, описываемым выражением (1).
Электрический сигнал на выходе сумматора сигналов приемных рамочных магнитных антенн 10 модулирован по амплитуде сигналом субтоновой частоты и описывается выражением (3) с учетом амплитудного множителя, характеризующего ослабление переменного магнитного поля при его распространении на известное расстояние. Этот электрический сигнал усиливают до ограничения с помощью усилителя-ограничителя сигналов звуковой частоты 11, устраняя тем самым амплитудную модуляцию принятого сигнала. Именно для хорошего подавления сигнала модуляции глубину модуляции выбирают невысокой. В результате на выходе усилителя-ограничителя 11 получают сигнал, первая гармоника которого, с учетом другой амплитуды сигнала, описывается выражением (1). Полученные колебания с выхода усилителя-ограничителя сигналов звуковой частоты 11 подают на сигнальные входы всех электронных ключей 14, 15, 16,…, 14+N. Одновременно сигнал с выхода сумматора сигналов приемных рамочных магнитных антенн 10 подают на демодулятор 12, где выделяют его огибающую, описываемую с учетом амплитудного множителя выражением (2). Полученный сигнал подают на частотный дискриминатор 13, в котором определяют частоту модулирующего сигнала и формируют только на одном из его выходов управляющее напряжение, открывающее только один из электронных ключей 14, 15, 16,…, 14+N. Если частота модулирующего сигнала равна субтоновой частоте 
С помощью передающего акустического преобразователя 17 ретрансляторной станции излучают в направлении измерительной станции акустическую волну. Акустическая волна с звуковой частотой 



Исходные непрерывные электрические колебания с выхода генератора непрерывных электрических колебаний 1, описываемые выражением (1) и с выхода приемного акустического преобразователя 5, описываемые выражением (4), подают на входы измерителя разности фаз 6, на выходе которого формируют сигнал, пропорциональный разности фаз сигналов (1) и (4). Однако измеритель разности фаз 6 способен адекватно отобразить измеряемую разность фаз, если величина этой разности фаз лежит в пределах от 0 до 


где 
Для решения этой проблемы указанное измеренное значение 



Важно при этом помнить, что изменение частоты 

После этого на измерительной станции формируют субтоновый сигнал с частотой 
Данную процедуру продолжают до тех пор пока не получат все необходимые расстояния до всех необходимых акустических преобразователей ретрансляторных станций и не осуществят позиционирование надводного/подводного объекта с высокой точностью в реальном масштабе времени, что обеспечит его проход по заданному фарватеру. При этом не производят измерение расстояний до удаленных акустических преобразователей, а ограничиваются необходимым и достаточным количеством измерений, обеспечивающих требуемую точность позиционирования и реализующих высокую оперативность измерений.
Эффект от использования предполагаемого изобретения связан с появлением возможности позиционирования надводного/подводного объекта в реальном масштабе времени в процессе его движения по заданному фарватеру.
Другой аспект повышения эффективности от использования предполагаемого изобретения связан с возможностью позиционирования объекта с повышенной точностью, при этом длина фарватера может быть протяженной.

Способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру относится к области техники радиотехнический средств позиционирования, основан на измерениях расстояний под водой и может быть использован, например, для позиционирования надводных/подводных объектов в локальных навигационных системах при управлении их движением. Новым в способе позиционирования надводного/подводного объекта является использование одновременно двух способов распространения волновых процессов, основанных на различных физических принципах, оба из которых пригодны для передачи сигналов под водой. При этом по каждому способу распространения волновых процессов используется несколько каналов передачи информации. При использовании первого способа распространения волнового процесса, в первых нескольких каналах передачи информации используется индуктивная связь одной передающей и нескольких приемных рамочных магнитных антенн. Причем наличие электропроводности воды не сказывается на работе этих каналов. С помощью этих каналов на измерительной станции, находящихся на контролируемом объекте, и на ретрансляторных станциях, размещенных под водой и определяющих заданный фарватер, формируют синфазные непрерывные электрические колебания звуковой частоты. При этом эти электрические колебания звуковой частоты модулируют по амплитуде и последовательно во времени несколькими сигналами субтоновой частоты. Количество сигналов субтоновой частоты задают количеством ретрансляторных станций, расположенных в контролируемом фарватере. На ретрансляторных станциях принятые ими синфазные и модулированные по амплитуде электрические колебания звуковой частоты складывают вместе и усиливают в одном канале до ограничения, а в другом канале демодулируют и подают демодулированный сигнал на вход частотного дискриминатора субтоновой частоты, сигналами с выходов которого замыкают соответствующий электронный ключ. При этом ограниченный по амплитуде сигнал звуковой частоты подают на акустический преобразователь именно той ретрансляторной станции, номер которой был идентифицирован в частотном дискриминаторе. Таким образом, акустическим преобразователем заданной ретрансляторной станции во втором информационном канале, использующем другой волновой процесс, формируют акустическую волну. Собственно набег фазы акустической волны низкой звуковой частоты является информационным параметром определения расстояния от акустического преобразователя измерительной станции, расположенной на объекте, до акустического преобразователя ретрансляционной станции, расположенной в реперной точке контролируемого фарватера. На самой измерительной станции акустическую волну принимают и преобразуют в электрический сигнал и далее последовательным изменением частоты непрерывных электрических колебаний звуковой частоты и сопутствующим измерением разности фаз электрических сигналов, формируемых в результате преобразований в акустическом канале, однозначно определяют расстояние от акустического преобразователя измерительной станции, расположенной на объекте, до акустического преобразователя ретрансляционной станции, расположенной в реперной точке контролируемого фарватера в локальной навигационной системе ближнего радиуса действия. Последовательно во времени на измерительной станции изменяют сигнал модуляции субтоновой частоты, детектируют это изменение в месте расположения ретрансляторных станций и, далее по приведенному алгоритму, определяют расстояние от измерительной станции, расположенной на объекте до каждой необходимой и достаточной ретрансляторной станции, расположенной в реперной точке контролируемого фарватера. 1 ил.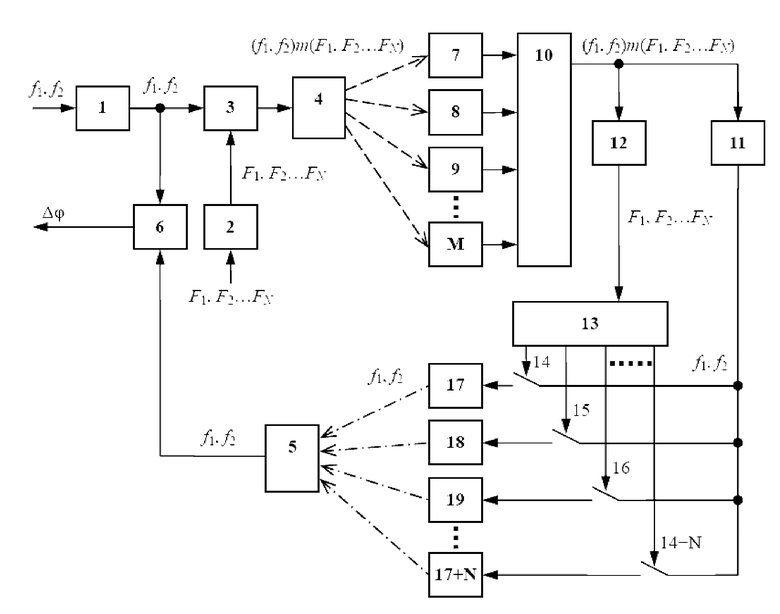
Способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру, характеризующийся тем, что первоначально на измерительной станции контролируемого объекта генерируют непрерывные электрические колебания с известной фиксированной звуковой частотой  , при этом эти непрерывные электрические колебания звуковой частоты подают первый вход измерителя разности фаз и на сигнальный вход амплитудного модулятора, при этом на модуляционный вход амплитудного модулятора подают непрерывные электрические колебания субтоновой частоты
, при этом эти непрерывные электрические колебания звуковой частоты подают первый вход измерителя разности фаз и на сигнальный вход амплитудного модулятора, при этом на модуляционный вход амплитудного модулятора подают непрерывные электрические колебания субтоновой частоты  , модулированный по амплитуде сигналом субтоновой частоты , после чего на другом конце измерительной трассы, в нескольких ее точках переменное магнитное поле одновременно улавливают несколькими приемными рамочными магнитными антеннами, которые устанавливают в нескольких точках по пути следования контролируемого объекта в заданном фарватере, причем места установки приемных рамочных магнитных антенн не обязательно должны совпадать с местами установки ретрансляторных станций, расстояния до которых необходимо измерить и которые определяют заданный фарватер, причем расстояние между соседними приемными рамочными магнитными антеннами устанавливают в соответствии с заданной энергетикой линии связи, использующей для связи переменное магнитное поле звуковой частоты, причем приемные рамочные магнитные антенны устанавливают как вдоль заданного фарватера, так и поперек его, и покрывают тем самым всю необходимую площадь уверенного приема сигнала передающей рамочной магнитной антенны измерительной станции хотя бы одной приемной рамочной магнитной антенной, после чего принятые всеми приемными рамочными магнитными антеннами непрерывные электрические колебания звуковой частоты , модулированные по амплитуде колебаниями субтоновой частоты подают на сигнальные входы управляемых электронных ключей, на управляющие входы которых подают сигналы частотного дискриминатора и замыкают только первый электронный ключ, который соответствует выбранной и идентифицированной в частотном дискриминаторе первой ретрансляторной станции, таким образом, усиленные до ограничения электрические колебания звуковой частоты подают на вход акустического преобразователя первой ретрансляторной станции, расстояние до которой необходимо измерить и излучают акустическим преобразователем первой ретрансляторной станции акустическую волну, которую принимают акустическим преобразователем измерительной станции контролируемого объекта, после чего принятые и преобразованные акустическим преобразователем измерительной станции электрические колебания звуковой частоты подают на второй вход измерителя разности фаз измерительной станции, после чего измеряют и фиксируют разность фаз
, модулированный по амплитуде сигналом субтоновой частоты , после чего на другом конце измерительной трассы, в нескольких ее точках переменное магнитное поле одновременно улавливают несколькими приемными рамочными магнитными антеннами, которые устанавливают в нескольких точках по пути следования контролируемого объекта в заданном фарватере, причем места установки приемных рамочных магнитных антенн не обязательно должны совпадать с местами установки ретрансляторных станций, расстояния до которых необходимо измерить и которые определяют заданный фарватер, причем расстояние между соседними приемными рамочными магнитными антеннами устанавливают в соответствии с заданной энергетикой линии связи, использующей для связи переменное магнитное поле звуковой частоты, причем приемные рамочные магнитные антенны устанавливают как вдоль заданного фарватера, так и поперек его, и покрывают тем самым всю необходимую площадь уверенного приема сигнала передающей рамочной магнитной антенны измерительной станции хотя бы одной приемной рамочной магнитной антенной, после чего принятые всеми приемными рамочными магнитными антеннами непрерывные электрические колебания звуковой частоты , модулированные по амплитуде колебаниями субтоновой частоты подают на сигнальные входы управляемых электронных ключей, на управляющие входы которых подают сигналы частотного дискриминатора и замыкают только первый электронный ключ, который соответствует выбранной и идентифицированной в частотном дискриминаторе первой ретрансляторной станции, таким образом, усиленные до ограничения электрические колебания звуковой частоты подают на вход акустического преобразователя первой ретрансляторной станции, расстояние до которой необходимо измерить и излучают акустическим преобразователем первой ретрансляторной станции акустическую волну, которую принимают акустическим преобразователем измерительной станции контролируемого объекта, после чего принятые и преобразованные акустическим преобразователем измерительной станции электрические колебания звуковой частоты подают на второй вход измерителя разности фаз измерительной станции, после чего измеряют и фиксируют разность фаз  , первично сформированными на измерительной станции и непрерывными электрическими колебаниями звуковой частоты , полученными на выходе акустического преобразователя измерительной станции контролируемого объекта, после чего на измерительной станции генерируют непрерывные электрические колебания звуковой частоты с другой известной фиксированной частотой
, первично сформированными на измерительной станции и непрерывными электрическими колебаниями звуковой частоты , полученными на выходе акустического преобразователя измерительной станции контролируемого объекта, после чего на измерительной станции генерируют непрерывные электрические колебания звуковой частоты с другой известной фиксированной частотой 


где 

 и также эти колебания модулируют электрическими колебаниями, но только субтоновой частоты подают на акустический преобразователь второй ретрансляторной станции, расстояние до которой нужно измерить, после чего излучают и принимают акустическую волну и далее по процедуре измеряют и фиксируют разность фаз
и также эти колебания модулируют электрическими колебаниями, но только субтоновой частоты подают на акустический преобразователь второй ретрансляторной станции, расстояние до которой нужно измерить, после чего излучают и принимают акустическую волну и далее по процедуре измеряют и фиксируют разность фаз  , первично сформированными на измерительной станции и непрерывными электрическими колебаниями звуковой частоты , полученными на выходе акустического преобразователя измерительной станции контролируемого объекта, после чего вновь на измерительной станции формируют колебания звуковой частоты
, первично сформированными на измерительной станции и непрерывными электрическими колебаниями звуковой частоты , полученными на выходе акустического преобразователя измерительной станции контролируемого объекта, после чего вновь на измерительной станции формируют колебания звуковой частоты 



после чего на измерительной станции генерируют непрерывные электрические колебания с третьей субтоновой частотой 



| Способ измерения дальности на контролируемом объекте и измерительной станции | 2019 |
|
RU2697861C1 |
| Способ измерения дальности | 2017 |
|
RU2657016C1 |
| СПОСОБ ДВУХСТОРОННЕЙ ДАЛЬНЕЙ РАДИОСВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 2017 |
|
RU2666904C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2018 |
|
RU2679000C1 |
| И.Б | |||
| Широков, Г.А | |||
| Иванов | |||
| ИЗМЕРЕНИЕ ДАЛЬНОСТИ ПОВЫШЕННОЙ ТОЧНОСТИ В ЗАДАЧАХ ПРИЧАЛИВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | |||
| Известия Кабардино-Балкарского научного центра РАН, номер 2 (88), 2019, стр | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |

