Изобретение относится к области техники радиотехнических средств измерения расстояния и может быть использовано, например, для измерения малых дальностей в локальных навигационных системах при управлении движением подводных объектов.
Известны амплитудные способы измерения дальности (см., например, кн. Справочник по основам радиолокационной техники / под ред. В. В. Дружинина. — М.: Воен. Издат, 1967). Однако амплитудные способы измерения дальности имеют большую погрешность.
Наиболее близким по технической сущности к предполагаемому изобретению является способ измерения дальности, с его модификациями, описанный в Патентах на изобретение № 2657016, № 2679000 и № 2697861, Россия, СПК G01S 15/08.
По этому способу измерения дальности в измерительной станции первоначально генерируют непрерывные колебания с известной фиксированной частотой 



где 
Однако указанный способ позволяет сформировать опорные электрические колебания низкой частоты в точке приема, которые будут синфазны или противофазны исходным колебаниям только в том случае, если передающая и приемная рамочные магнитные антенны (катушки индуктивностей) взаимно параллельны или сосны. Если же продольные оси этих антенн (катушек индуктивностей) взаимно перпендикулярны, то наводимая в приемной рамочной магнитной антенне электродвижущая сила стремится к нулю. В этом случае невозможно сформировать опорные электрические колебания в точке приема, невозможно измерить разность фаз электрических колебаний, соответственно невозможно измерить дальность. Вместе с тем, приемная и/или передающая рамочные магнитные антенны могут устанавливаться на подвижных объектах. Если решить проблему расположения продольных осей этих антенн только в горизонтальной плоскости еще можно конструкцией подводных объектов, то предугадать в этом случае их взаимное расположение в этой горизонтальной плоскости заранее не представляется возможным. Соответственно существует вероятность их взаимно перпендикулярного расположения, что делает невозможным измерение дальности.
Целью настоящего изобретения является реализация возможности измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны.
Поставленная цель достигается тем, что по способу измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны, включающему генерирование непрерывных электрических колебаний низкой частоты, излучение переменного магнитного поля низкой частоты, прием переменного магнитного поля низкой частоты, излучение и прием акустических колебаний, измерение разности фаз непрерывных электрических колебаний низкой частоты, последовательное изменение частоты электрических колебаний низкой частоты,
отличающийся тем, что генерируют два непрерывных электрических колебания низкой частоты с одинаковыми частотами, но со сдвигом фаз между ними в 90°, причем непрерывные электрические колебания низкой частоты с нулевой фазой подают на клеммы первой передающей рамочной магнитной антенны, а непрерывные электрические колебания низкой частоты со сдвигом по фазе на 90° относительного непрерывных электрических колебаний низкой частоты с нулевой фазой, подают на клеммы второй передающей рамочной магнитной антенны, причем продольные оси первой и второй передающих рамочных магнитных антенн располагают взаимно перпендикулярно в горизонтальной плоскости, и излучают тем самым переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости, при этом переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости улавливают приемной рамочной магнитной антенной, продольную ось которой располагают в горизонтальной плоскости, причем на выходе приемной рамочной магнитной антенны получают непрерывные электрические колебания низкой частоты, начальная фаза которых изменяется в пределах от 0 до 2π при изменении положения в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны от 0 до 2π относительно продольной оси первой передающей рамочной магнитной антенны, после чего последовательно измеряют разности фаз сигналов с выхода приемной рамочной магнитной антенны и с выхода приемного акустического преобразователя при последовательном изменении частоты непрерывных электрических колебания низкой частоты и определяют расстояние между передающим и приемным акустическими преобразователями, при этом положение в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны относительно продольных осей передающих рамочных магнитных антенн не имеет значения.
Сравнение предполагаемого изобретения с уже известными способами и прототипом показывает, что заявляемый способ проявляет новые технические свойства, заключающиеся в возможности измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны относительно положения в этой плоскости продольных осей передающих рамочных магнитных антенн.
Эти свойства предполагаемого изобретения являются новыми, так как в способе прототипе в силу присущих ему недостатков, заключающихся существовании вероятности взаимно перпендикулярного расположения продольных осей передающей и приемной рамочных магнитных антенн, измерение дальности не представляется возможным.
Указанный способ измерения дальности под водой при произвольном положении в плоскости продольной оси приемной рамочной магнитной антенны можно реализовать с помощью устройства, показанного на фиг. 1.
Устройство измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны состоит из генератора непрерывных электрических колебаний низкой частоты 1, первой передающей рамочной магнитной антенны 2, второй передающей рамочной магнитной антенны 3, передающего акустического преобразователя 4, приемной рамочной магнитной антенны 5, приемного акустического преобразователя 6, измерителя разности фаз непрерывных колебаний 7.
Первый выход генератора непрерывных электрических колебаний низкой частоты 1 соединен с входом первой передающей рамочной магнитной антенны 2 и с входом передающего акустического преобразователя 4, при этом второй выход генератора непрерывных электрических колебаний низкой частоты 1 соединен с входом второй передающей рамочной магнитной антенны 3, причем выход приемной рамочной магнитной антенны 5 соединен с первым входом измерителя разности фаз 7, а выход приемного акустического преобразователя 5 соединен со вторым входом измерителя разности фаз 7.
Работает устройство, реализующее заявляемый способ измерения дальности под водой при произвольном положении в плоскости продольной оси приемной рамочной магнитной антенны следующим образом.
С помощью генератора непрерывных колебаний 1 первоначально генерируют два непрерывных электрических колебаний низкой частоты с известной частотой 




Значение частоты этих колебаний лежит в звуковом или ультразвуковом диапазоне длин волн. Колебания, описываемые выражением (1) подают на вход первой передающей рамочной магнитной антенны 2 и одновременно на вход передающего акустического преобразователя 4. Колебания, описываемые выражением (2) подают на вход второй передающей рамочной магнитной антенны 3. Продольные оси передающих рамочных магнитных антенн 2 и 3 располагают взаимно перпендикулярно.
С помощью передающих рамочных магнитных антенн 2 и 3 излучают переменное магнитное поле низкой частоты круговой поляризации. При низких частотах 



С другой стороны, с помощью передающего акустического преобразователя 4 излучают в направлении другого конца измерительной трассы акустическую волну. Акустическая волна с частотой 


Непрерывные колебания с выхода приемной рамочной магнитной антенны 5, описываемые выражением (3) и с выхода приемного акустического преобразователя 5, описываемые выражением (4), подают на входы измерителя разности фаз 6, на выходе которого формируют сигнал, пропорциональный разности фаз сигналов (3) и (4). Однако измеритель разности фаз 6 способен адекватно отобразить измеряемую разность фаз, если величина этой разности фаз лежит в пределах от 0 до 

где 
Для решения этой проблемы указанное измеренное значение

и вычисляют дальность по формуле
Важно при этом помнить, что изменение частоты 
Эффект от использования предполагаемого изобретения связан с появлением возможности измерения дальности под водой, при том, что взаимное положение продольной оси приемной рамочной магнитной антенны и передающей рамочной магнитной антенны не имеет значение. При любом положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны амплитуда сигнала на ее выходе будет одинакова, изменяется лишь начальная фаза получаемого сигнала.
Другой аспект повышения эффективности от использования предполагаемого изобретения связан с возможностью измерения дальности с повышенной точностью, при этом неоднозначность измерений исключается.

Способ измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны относится к области техники радиотехнических средств измерения расстояний и может быть использован, например, для измерения малых дальностей в локальных навигационных системах при управлении движением подводных объектов. Как и прежде, используется два канала передачи информации, оба из которых пригодны для передачи сигналов под водой. В первом канале используется индуктивная связь рамочных магнитных антенн. С помощью этого канала на обоих концах измерительной трассы формируют непрерывные колебания с известным сдвигом фаз. В другом канале используются акустические волны. Собственно набег фазы акустических волн является информационным параметром определения расстояния. Новым в способе измерения дальности является использование одновременно двух передающих рамочных магнитных антенн, продольные оси которых взаимно перпендикулярны в горизонтальной плоскости. При этом на антенны подаются сигналы низкой частоты, сдвинутые друг относительно друга на 90°. Таким образом, антенны формируют переменное магнитное поле круговой поляризации в горизонтальной плоскости. При этом уровень сигнала, наводимый в приемной рамочной магнитной антенне, не зависит от ориентации ее продольной оси в горизонтальной плоскости и всегда имеет одно и ту же величину. Меняется лишь значение начальной фазы сигнала при изменении положения продольной оси приемной рамочной магнитной антенны. Однако при последующем изменении разностей фаз данная начальная фаза взаимно вычитается, и дальность определяется однозначно при любом положении продольной оси приемной рамочной магнитной антенны. 1 ил.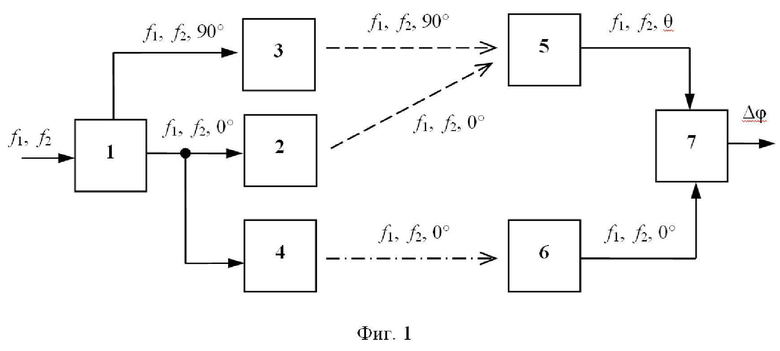
Способ измерения дальности под водой при произвольном положении в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны, включающий генерирование непрерывных электрических колебаний низкой частоты, излучение переменного магнитного поля низкой частоты, прием переменного магнитного поля низкой частоты, излучение и прием акустических колебаний, измерение разности фаз непрерывных электрических колебаний низкой частоты, последовательное изменение частоты электрических колебаний низкой частоты,
отличающийся тем, что генерируют два непрерывных электрических колебания низкой частоты с одинаковыми частотами, но со сдвигом фаз между ними в 90°, причем непрерывные электрические колебания низкой частоты с нулевой фазой подают на клеммы первой передающей рамочной магнитной антенны, а непрерывные электрические колебания низкой частоты со сдвигом по фазе на 90° относительно непрерывных электрических колебаний низкой частоты с нулевой фазой, подают на клеммы второй передающей рамочной магнитной антенны, причем продольные оси первой и второй передающих рамочных магнитных антенн располагают взаимно перпендикулярно в горизонтальной плоскости, и излучают тем самым переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости, при этом переменное магнитное поле низкой частоты круговой поляризации в горизонтальной плоскости улавливают приемной рамочной магнитной антенной, продольную ось которой располагают в горизонтальной плоскости, причем на выходе приемной рамочной магнитной антенны получают непрерывные электрические колебания низкой частоты, начальная фаза которых изменяется в пределах от 0 до 2π при изменении положения в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны от 0 до 2π относительно продольной оси первой передающей рамочной магнитной антенны, после чего последовательно измеряют разности фаз сигналов с выхода приемной рамочной магнитной антенны и с выхода приемного акустического преобразователя при последовательном изменении частоты непрерывных электрических колебаний низкой частоты и определяют расстояние между передающим и приемным акустическими преобразователями, при этом положение в горизонтальной плоскости продольной оси приемной рамочной магнитной антенны относительно продольных осей передающих рамочных магнитных антенн не имеет значения.
| Способ измерения дальности на контролируемом объекте и измерительной станции | 2019 |
|
RU2697861C1 |
| Способ измерения дальности | 2017 |
|
RU2657016C1 |
| СПОСОБ ДВУХСТОРОННЕЙ ДАЛЬНЕЙ РАДИОСВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 2017 |
|
RU2666904C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2018 |
|
RU2679000C1 |

