Область техники, к которой относится изобретение
Изобретение относится к летательным аппаратам, в частности к конструкции двигательной установки беспилотного летательного аппарата.
Уровень техники
Беспилотные летательные аппараты (БПЛА, UAV) постепенно становятся частью повседневной жизни – они выполняют доставку грузов, различные исследования, анализ окружающего пространства, мониторинг территорий, контроль объектов, фото- и видеосъемку, используются в спасательных операциях и находят множество других применений.
Возможности относительно небольшого коммерческого БПЛА являются ограниченными и не позволяют ему круглосуточно находиться в воздухе, поэтому часть рабочего времени БПЛА вынужден находиться на базе. Для сокращения простоя БПЛА важное значение приобретают вопросы быстрой и удобной заправки/зарядки, технического обслуживания и подготовки БПЛА к эксплуатации. Авторы настоящего документа предлагают решения, которые позволяют повысить эффективность использования БПЛА.
Сущность изобретения
Предложен модуль маршевого двигателя с электродвигателем для беспилотного воздушного судна самолетного типа с вертикальным взлетом и посадкой (VTOL), содержащий:
корпус, содержащий одну или более стенок, причем первая стенка корпуса выполнена с возможностью соединения с фюзеляжем VTOL;
маршевый двигатель для VTOL, прикрепленный к первой стенке корпуса и предназначенный находиться снаружи фюзеляжа, причем маршевым двигателем является электродвигатель;
аккумулятор, предназначенный находиться внутри фюзеляжа и размещенный с обратной стороны первой стенки корпуса от маршевого двигателя, причем аккумулятор соединен с маршевым двигателем через первую стенку для передачи в маршевый двигатель электроэнергии, причем аккумулятор содержит датчики тока и напряжения; и
контроллер, соединенный с маршевым двигателем и с аккумулятором и выполненный с возможностью приема сообщений от внешних устройств, приема данных о состоянии от маршевого двигателя и аккумулятора, отправки запросов и команд на маршевый двигатель и аккумулятор и отправки сообщений на внешние устройства, причем обмен сообщениями с внешними устройствами выполняется через программный интерфейс (API).
В одном из вариантов осуществления маршевый двигатель прикреплен к верхней половине первой стенки корпуса, причем аккумулятор размещен вблизи второй стенки корпуса, которая является противоположной для первой стенки корпуса.
В одном из вариантов осуществления стенки корпуса и/или стенки аккумулятора содержат направляющие элементы для взаимодействия с ответными направляющими элементами на стенках фюзеляжа для извлечения и вставки модуля маршевого двигателя в фюзеляж.
В одном из вариантов осуществления стенки корпуса и/или стенки аккумулятора содержат антивибрационные элементы, маршевый двигатель и аккумулятор прикреплены к стенкам корпуса через демпферы, первая стенка корпуса выполнена с возможностью соединения с фюзеляжем через уплотнительную манжету.
В одном из вариантов осуществления первая стенка корпуса выполнена из двух слоев стеклотекстолита и одного слоя фанеры, расположенного между ними, причем толщина слоя фанеры больше толщины слоев стеклотекстолита, причем первая стенка корпуса выполнена с возможностью перекрывать все поперечное сечение фюзеляжа в месте его соединения с первой стенкой корпуса.
В одном из вариантов осуществления контроллер выполнен с возможностью управления двигателем на основе сообщений, принимаемых от внешнего устройства через API, приема данных об уровне тока и напряжения от аккумулятора и данных о числе оборотов от маршевого двигателя, передачи данных через API на внешнее устройство, а также контроля процесса заряда аккумулятора.
В одном из вариантов осуществления внешними устройствами являются полетный контроллер VTOL, бортовая сеть VTOL, бортовая шина данных VTOL и/или диагностическое устройство.
В одном из вариантов осуществления модуль маршевого двигателя дополнительно содержит по меньшей мере один внешний разъем, соединенный с контроллером и предназначенный для осуществления электропитания контроллера и обмена данными контроллера с внешними устройствами путем их присоединения через ответный разъем.
В одном из вариантов осуществления контроллер расположен в корпусе контроллера, выполненном на второй стенке корпуса модуля маршевого двигателя, причем имеется по меньшей мере два внешних разъема, причем по меньшей мере один внешний разъем расположен в корпусе контроллера, а по меньшей мере один другой внешний разъем расположен на первой стенке корпуса модуля маршевого двигателя.
В одном из вариантов осуществления контроллер расположен в корпусе контроллера, выполненном на второй стенке корпуса модуля маршевого двигателя, причем вторая стенка корпуса модуля маршевого двигателя целиком выполнена из эластичного материала.
Технический результат
Настоящее техническое решение позволяет упростить и ускорить процессы сборки/разборки, транспортировки, заправки/зарядки, технического обслуживания и подготовки БПЛА к эксплуатации, а также увеличить надежность, безопасность и ремонтопригодность БПЛА.
Эти и другие преимущества настоящего решения станут понятны при прочтении нижеследующего подробного описания со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
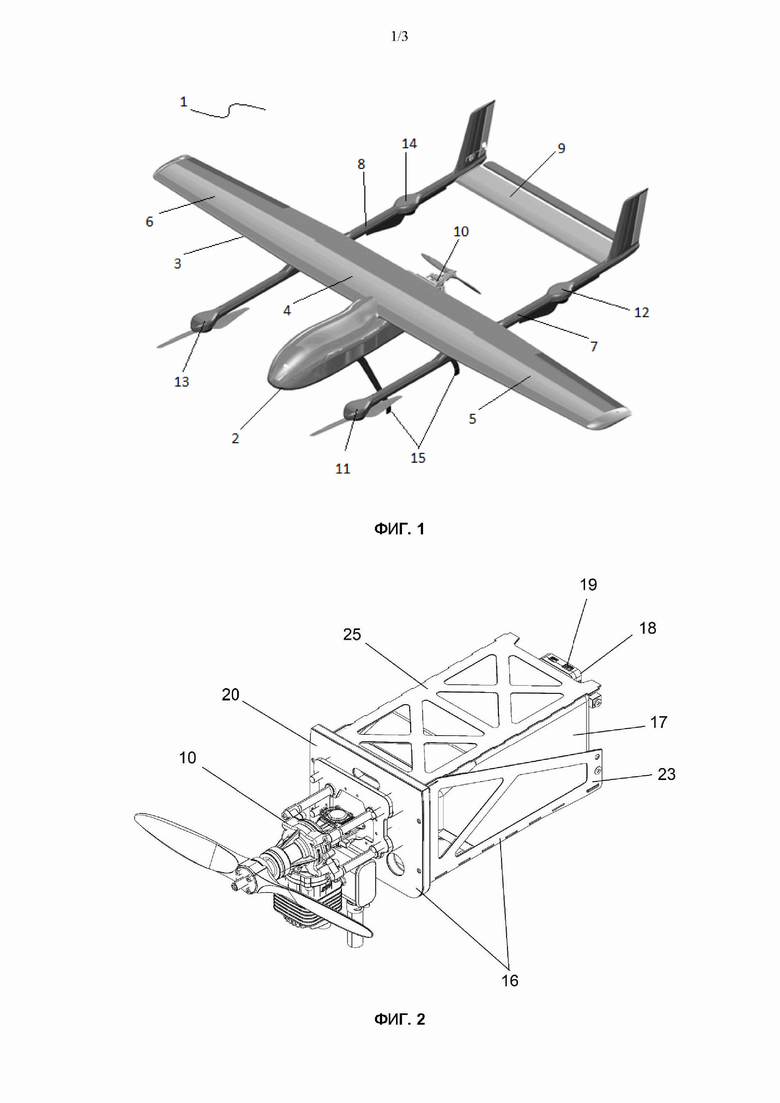
На Фиг. 1 показан БПЛА в сборе.
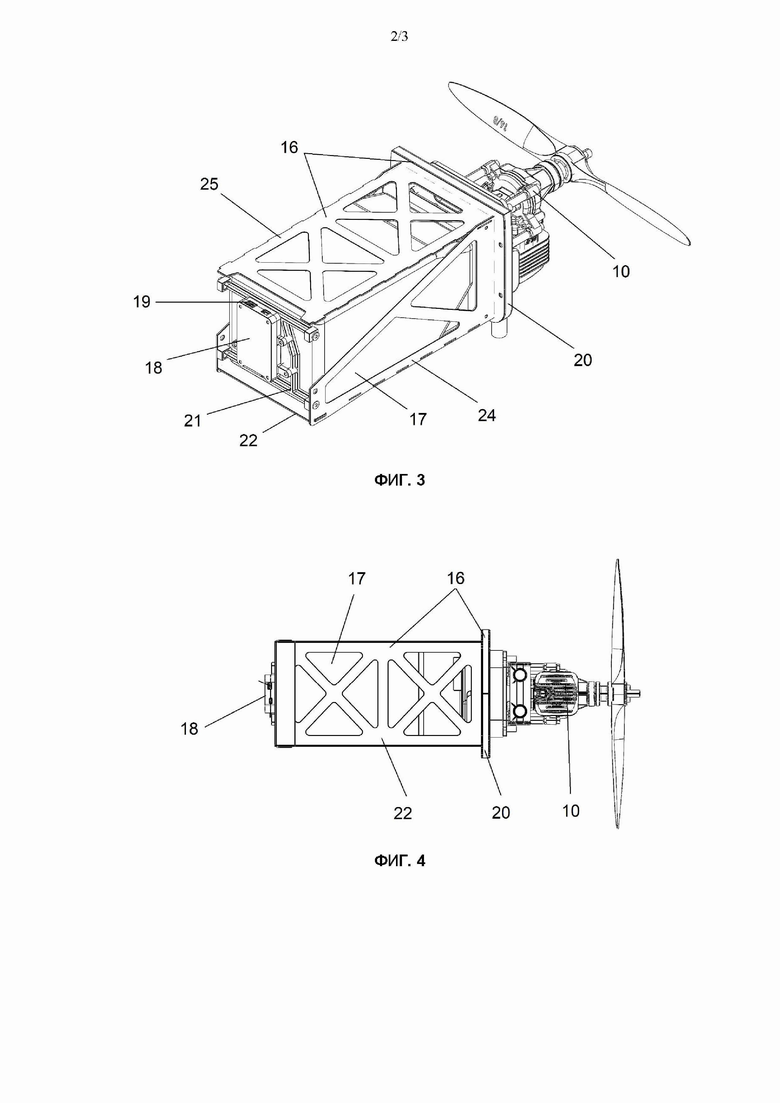
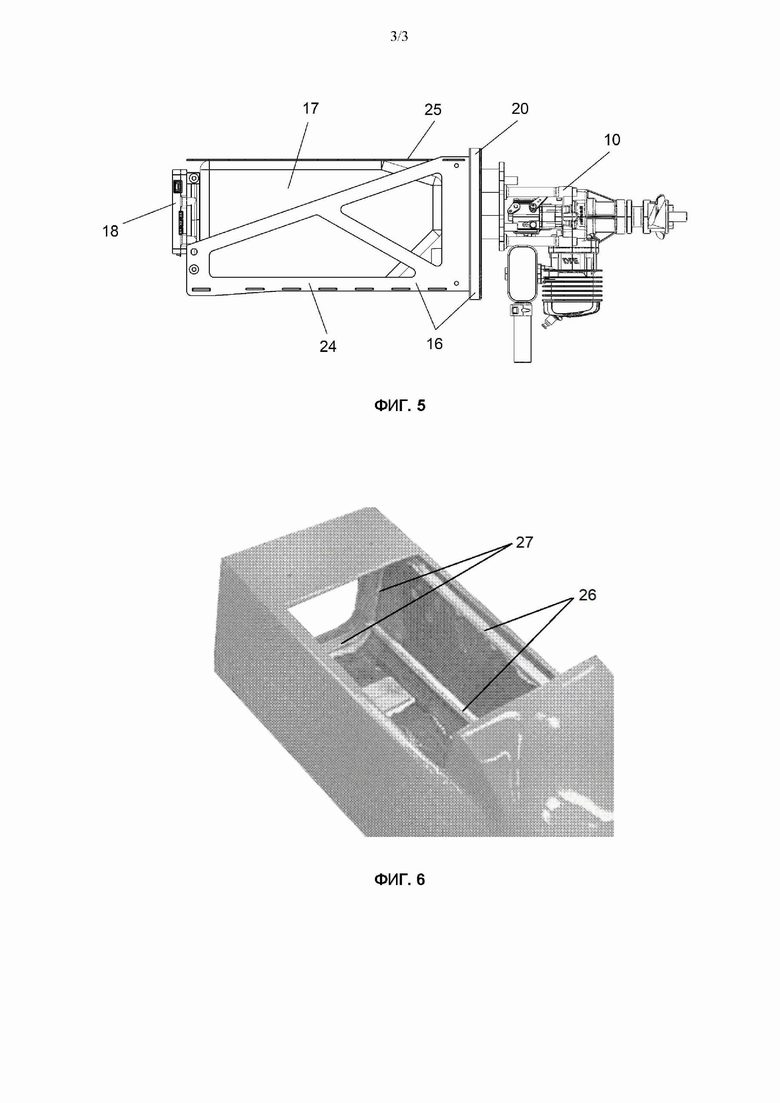
На Фиг. 2-5 показан модуль маршевого двигателя в разных проекциях.
На Фиг. 6 показан пример части фюзеляжа, в которую вставляется модуль маршевого двигателя.
Следует понимать, что фигуры могут быть представлены схематично и не в масштабе и предназначены, главным образом, для улучшения понимания настоящего решения.
Подробное описание
В настоящем документе главным образом описывается беспилотный летательный аппарат (БПЛА) (или иными словами, беспилотное воздушное судно (БВС)), который выполнен в виде самолета вертикального взлета и посадки (СВВП, VTOL). БПЛА выполнен сборно-разборным, обладает возможностями горизонтального полета и вертикального взлета и посадки и сочетает в себе преимущества самолета и коптера. В то же время, принципы, описанные в настоящем документе, применимы и к другим БПЛА, содержащим маршевый двигатель.
БПЛА в сборе показан на Фиг. 1. БПЛА 1 содержит фюзеляж 2 и присоединенное к нему в верхней задней части крыло 3, содержащее центроплан 4 и присоединенные к нему по краям консоли 5 и 6. Кроме того, БПЛА 1 содержит балки 7 и 8, присоединенные своей центральной частью к крылу 3, и стабилизатор 9, присоединенный по краям к задним частям балок 7 и 8. В задней части фюзеляжа 2 позади крыла и/или под крылом установлен горизонтально маршевый двигатель 10. На балках в передней части и в области между крылом и стабилизатором установлены вертикально электродвигатели 11, 12, 13, 14. К нижней части фюзеляжа 2 присоединены опоры (шасси) 15. Бортовое оборудование (не показано на чертежах) содержится внутри фюзеляжа 2 и при необходимости может быть также установлено на фюзеляже 2 или других частях БПЛА 1. Бортовое оборудование может включать в себя модуль управления двигателями, полетный контроллер, приемопередатчик, модуль навигации, аккумулятор, камеру, датчики. Конкретный набор элементов бортового оборудования и их компоновка не ограничиваются в настоящем решении.
В различных применениях маршевый двигатель может устанавливаться как в задней части, так и в передней части фюзеляжа 2. В качестве маршевого двигателя может выступать, например, двигатель внутреннего сгорания (ДВС) или электродвигатель. Его задачей является создание движущей силы для горизонтального перемещения БПЛА, когда он находится в воздухе.
Решения, предложенные в настоящем документе, направлены на повышение удобства эксплуатации и обслуживания маршевого двигателя.
Модуль маршевого двигателя
Предлагается исполнение маршевого двигателя не в виде отдельного элемента, неразборно зафиксированного в фюзеляже, а в виде съемного модуля. Более того, предлагается поместить в модуль маршевого двигателя также и блок источника энергии. В качестве блока источника энергии может выступать, например, топливный бак для двигателя внутреннего сгорания или аккумуляторная сборка / блок питания для электродвигателя.
Такая комбинация позволяет существенно ускорить и упростить процесс заправки/дозаправки/зарядки источника энергии, так как блок источника энергии не зафиксирован неразъемно внутри фюзеляжа. Если требуется максимальная скорость ввода БПЛА в эксплуатацию, можно просто сразу заменить один модуль маршевого двигателя на другой, в котором источник энергии уже заправлен/заряжен. Если допустима заправка/дозаправка/зарядка без смены модуля маршевого двигателя, то данная конструкция тоже удобнее, чем традиционная, потому что в предложенном решении можно визуально наблюдать уровень топлива в баке, и для этого не требуется установка смотрового окна в фюзеляже. Кроме того, в предложенном решении можно осуществлять обслуживание не в той же точке, где находится БПЛА, а в любой удобной точке – например, можно посадить БПЛА на площадку, вынуть из него модуль маршевого двигателя и отнести его к машине, в которой находится необходимая аппаратура, где и выполнить в комфортных условиях осмотр и обслуживание, такое как заправку/дозаправку/зарядку источника энергии, замену винта, смазку и т.д.
Пример модуля маршевого двигателя согласно настоящему решению показан на Фиг. 2-5.
В частности, модуль маршевого двигателя содержит корпус 16 и прикрепленные к нему маршевый двигатель 10 и блок 17 источника энергии. Кроме того, модуль маршевого двигателя содержит контроллер 18, соединенный с маршевым двигателем 10 и с блоком 17 источника энергии, и внешний разъем 19, соединенный с контроллером 18.
Блок 17 источника энергии может содержать датчик уровня – например, датчик уровня топлива в топливном баке или датчик уровня заряда в аккумуляторной сборке. При необходимости топливный бак может содержать топливный насос. При необходимости аккумуляторная сборка может содержать собственный контроллер.
Контроллер 18 может быть закреплен как на корпусе 16 (предпочтительный вариант), так и на маршевом двигателе 10 или блоке 17 источника энергии. Соединение контроллера 18 с маршевым двигателем 10, с блоком 17 источника энергии и с внешним разъемом 19 осуществляется в предпочтительном варианте проводным образом, поскольку это наиболее надежный вариант, однако допустимы и иные варианты осуществления, в которых одно или несколько из этих соединений выполняются по беспроводной линии связи. Кроме того, возможность беспроводного соединения с внешними устройствами может быть предусмотрена в дополнение к проводным соединениям в качестве запасного варианта – например, на случай разрыва/перегорания провода или его выпадения от вибрации.
Контроллер 18 может питаться от блока 17 источника энергии, если он электрический, и/или от внешнего источника питания проводным образом через внешний разъем 19 – например, от бортовой сети БПЛА или от диагностического устройства, которым пользуется оператор во время ремонта и обслуживания модуля маршевого двигателя. При необходимости контроллер 18 может иметь собственный источник питания, такой как аккумуляторная батарея (не показано на чертежах) – этот вариант увеличивает автономность модуля маршевого двигателя. Для повышения надежности предпочтительно использовать основное питание через внешний разъем 19 или хотя бы предусматривать возможность внешнего питания в качестве запасного на случай возникновения проблем с собственным питанием.
Внешний разъем 19 может быть закреплен на корпусе 16 (предпочтительный вариант), на маршевом двигателе 10, на блоке 17 источника энергии, на плате или корпусе контроллера 18 или же может быть соединен с одним или несколькими из них кабелем или набором проводов без закрепления, то есть в подвешенном состоянии. Внешний разъем 19 может быть выполнен в виде типового автомобильного разъема, USB, Molex и любого другого разъема, с помощью которого можно передавать данные и осуществлять электропитание. Внешний разъем 19 соединяется с ответным разъемом на стороне бортовой сети внутри фюзеляжа. Соединение разъемов может выполняться вручную перед вставкой модуля маршевого двигателя в фюзеляж, если внешний разъем 19 подвешен на кабеле, или же может выполняться самопроизвольно при вставке модуля маршевого двигателя в фюзеляж за счет вспомогательных элементов, если внешний разъем 19 жестко закреплен.
Контроллер 18 содержит вычислительное средство и память, хранящую набор программ и команд для управления работой и контроля модуля маршевого двигателя и его компонентов и для обмена данными с внешними устройствами. Контроллер 18 принимает управляющие и диагностические сообщения, запросы и команды от внешних устройств (например, от полетного контроллера или от диагностического устройства оператора), принимает данные о состоянии от маршевого двигателя 10 (например, число оборотов, температуру) и блока 17 источника энергии (например, уровень топлива в баке или заряда аккумулятора), отправляет запросы и команды на маршевый двигатель 10 (например, для управления частотой вращения вала) и блок 17 источника энергии (например, для управления процессом заряда или управления насосом), а также отправляет данные на внешние устройства (например, данные о числе оборотов двигателя, об уровне топлива в баке, о версии программного обеспечения, о версии сборки модуля и т.д.). Контроллер 18 может быть выполнен на одной или более печатных плат и содержать собственный корпус. Для управления двигателем контроллер 18 может содержать регулятор скорости вращения двигателя.
Таким образом, обеспечивается возможность создания полноценно отлаженного, самостоятельного модуля маршевого двигателя, который можно обслуживать, ремонтировать, диагностировать и калибровать независимо от остальной части БПЛА. Также это позволяет производить линейку БПЛА с разными летными характеристиками, имея один и тот же конструктив планера: можно варьировать скорость, дальность, время полета, уровень шума и другие характеристики, просто устанавливая модули маршевого двигателя с разными двигателями и разными топливными баками/аккумуляторами. В качестве неограничивающего примера, модуль, содержащий простой и недорогой ДВС одной марки с небольшим топливным баком, обеспечит недорогое решение с типовым набором задач мониторинга; модуль, содержащий ДВС с улучшенными характеристиками и увеличенный топливный бак, обеспечит выполнение расширенного спектра задач и в более широком диапазоне условий окружающей среды; а модуль, содержащий электродвигатель и аккумулятор повышенной емкости, обеспечит выполнение задач доставки с пониженным уровнем шума на городской территории.
Такой подход позволяет уменьшить срок производства готового изделия, потому что можно иметь на складе уже собранный планер и отдельно уже собранные модули маршевого двигателя, и с момента получения заказа останется лишь присоединить нужный модуль маршевого двигателя к фюзеляжу, не запуская сложный цикл производства БПЛА от самой закладки фюзеляжа со специализированным встроенным внутрь оборудованием под конкретные требования заказчика. В другом варианте, если необходимо поставить разборный БПЛА, можно иметь на складе уже готовые составные элементы планера и отдельно уже собранные модули маршевого двигателя, и с момента получения заказа останется лишь упаковать в транспортный контейнер составные элементы планера и нужный модуль маршевого двигателя, не запуская сложный цикл производства БПЛА от самой закладки фюзеляжа со специализированным встроенным внутрь оборудованием под конкретные требования заказчика.
Более того, поскольку модуль маршевого двигателя является законченным продуктом, сборка которого не зависит от планера, обеспечивается возможность разнести производство модуля маршевого двигателя и планера как по разным участкам/цехам одного производителя, так и по разным производителям.
Кроме того, дополнительным преимуществом предложенного подхода является то, что пользователь может иметь один планер и несколько модулей маршевого двигателя под разные задачи. При этом удобство соединения позволяет пользователю не обладать особыми навыками и инструментами для сборки. В другом варианте пользователь может производить усовершенствование своего БПЛА, не покупая полностью новый БПЛА, а лишь докупая более развитый модуль маршевого двигателя. В другом варианте, если у пользователя произошла поломка одного или более компонентов модуля маршевого двигателя, упрощается доставка и ремонт, поскольку нет необходимости транспортировать целый фюзеляж в сборе.
Еще одним преимуществом предложенного подхода является то, что упрощается обмен данными между бортовой сетью / шиной данных и модулем маршевого двигателя. Программное обеспечение бортовой сети / шины данных в настоящем решении создается под универсальный набор запросов и команд для обмена данными с модулем маршевого двигателя через программный интерфейс (API) независимо от того, какие конкретно компоненты содержатся в этом модуле. В рамках самого модуля маршевого двигателя контроллер 18 организует обмен данными со входящими в его состав компонентами конкретно в том формате, который требуется этими компонентами, однако в внешними устройствами общается через API посредством универсальных сообщений. Соответственно, при создании ПО для бортовой сети / шины данных нет необходимости подстраиваться под конкретную реализацию модуля маршевого двигателя, то есть бортовое оборудование может иметь типовую прошивку, не зависящую от модуля маршевого двигателя. Учитывая, что некоторые модули маршевого двигателя могут иметь расширенные возможности, контроллер 18 при инициализации модуля маршевого двигателя в бортовой сети может сообщать о своем наборе возможностей, чтобы бортовое оборудование могло использовать эти возможности в полной мере, но и не превышать их. Для удобства все возможности также могут быть перечислены/собраны в нескольких типовых наборах/пакетах, и тогда контроллеру 18 достаточно сообщать в бортовую сеть лишь номер своего набора возможностей. Соответственно, обмен данными бортовой сети/шины с контроллером через API тоже позволяет разнести разработку ПО для модуля маршевого двигателя и для остального бортового оборудования. Аналогичным образом, это упрощает разработку и обновление ПО для диагностики и обслуживания.
Помимо того, в рассматриваемой на Фиг. 1 конструкции VTOL для доступа к блоку 17 источника энергии во время заправки/зарядки и обслуживания за счет съемного модуля маршевого двигателя нет необходимости ставить БПЛА на высокую платформу или разбирать его крыло 3 – в частности, центроплан 4, под которым расположен блок 17 источника энергии.
ДВС
Как указывалось выше, в одном варианте осуществления в качестве маршевого двигателя 10 используется двигатель внутреннего сгорания (ДВС). Соответственно, в качестве блока 17 источника энергии используется топливный бак для ДВС.
Топливный бак является емкостью, в которую заливается топливо для ДВС, такое как бензин, керосин и т.п. При необходимости топливный бак может содержать топливный насос для упрощения подачи топлива в двигатель.
Топливный бак может содержать датчик уровня топлива. Датчик уровня топлива может быть, например, поплавковый, ультразвуковой, емкостной, радарный, оптический и т.д. Датчик уровня топлива проводным или беспроводным образом соединен с контроллером 18 и передает в него измеряемые показания уровня топлива постоянно, через заданные промежутки времени или по запросу от контроллера. Показания могут передаваться в аналоговом или в цифровом виде.
Учитывая, что топливный бак вынимается из фюзеляжа в составе модуля маршевого двигателя, нет необходимости изготавливать фюзеляж и/или центроплан со специальным отверстием в нем, уплотнительной манжетой, крышкой и трубкой до бака внутри фюзеляжа. Отверстие или горловина для залива топлива в топливный бак может располагаться непосредственно на самом баке, при этом обеспечивается возможность залива топлива в бак прямо из канистры, не используя специальных средств. Возможны и другие варианты осуществления, в которых заправка бака может производиться иначе – например, через горловину, расположенную на задней стенке корпуса 18. В таком варианте для заправки не обязательно будет вынимать модуль маршевого двигателя из фюзеляжа. Также возможны комбинации, когда один и тот же бак можно заправить разными способами.
Модуль маршевого двигателя может при необходимости содержать несколько внешних разъемов 19 – например, один может быть расположен в области передней стенки корпуса 16, которая направлена внутрь фюзеляжа, и предназначен для соединения с бортовой сетью БПЛА, а другой может быть расположен на задней стенке корпуса 16, которая направлена наружу к двигателю, и предназначен для подключения к диагностическому устройству оператора. Следует отметить, что целесообразно разносить между собой горловину топливного бака и внешний разъем 19 во избежание залива разъема топливом и/или воспламенения топлива под действием электрического тока. Предложенные в настоящем решении подходы позволяют свободно выполнить подобное разнесение – например, выполнить внешние разъемы на передней и задней стенке, а горловину топливного бака посередине его верхней стенки.
В процессе заправки контроллер 18 может выдавать данные, указывающие уровень топлива, на индикатор уровня топлива, расположенный в модуле маршевого двигателя, в бортовую сеть БПЛА, если он подключен к ней, и/или на диагностическое устройство оператора, чтобы оператор мог контролировать заправку. Кроме того, топливный бак может иметь прозрачную или полупрозрачную стенку или шкалу на стенке, чтобы оператор мог визуально наблюдать уровень топлива в баке.
Модуль маршевого двигателя уже имеет собственный контроллер 18, поэтому можно использовать двигатель без своего контроллера и все его функции выполнять с помощью контроллера 18 модуля маршевого двигателя. Это упрощает и удешевляет конструкцию модуля маршевого двигателя и обеспечивает низкоуровневое управление и контроль двигателя, за счет чего можно достичь оптимальных характеристик с учетом конкретного сочетания компонентов и конкретных требований применения.
Электродвигатель
Как указывалось выше, еще в одном варианте осуществления в качестве маршевого двигателя 10 используется электродвигатель. Соответственно, в качестве блока 17 источника энергии используется аккумулятор, аккумуляторная сборка из нескольких элементов питания или заряжаемый блок питания (для простоты описания в настоящем документе может упоминаться только аккумулятор, но следует понимать, что подразумевается любая возможная реализация блока 17 источника энергии в виде источника электрической энергии).
Аккумулятор может быть выполнен по любой технологии, подходящей под условия и требования конкретного применения – например, аккумулятор может быть свинцово-кислотный, гелевый, щелочной, литий-ионный, литий-полимерный, алюминий-ионный и т.д.
В зависимости от реализации аккумулятор может содержать датчик температуры, датчик давления, датчик уровня заряда, датчик напряжения, датчик тока заряда и разряда, датчик внутреннего сопротивления аккумулятора и т.д. Датчик(и) аккумулятора проводным или беспроводным образом соединен(ы) с контроллером 18 и передает(ют) в него измеряемые показания постоянно, через заданные промежутки времени или по запросу от контроллера. Показания могут передаваться в аналоговом или в цифровом виде.
Учитывая, что модуль маршевого двигателя уже имеет собственный контроллер, можно использовать аккумулятор без контроллера и все функции контроллера аккумулятора, в том числе контроллера заряда аккумулятора, выполнять с помощью контроллера 18 модуля маршевого двигателя. Аналогичным образом, можно использовать двигатель без своего контроллера и все его функции выполнять с помощью контроллера 18 модуля маршевого двигателя. Это упрощает и удешевляет конструкцию модуля маршевого двигателя и обеспечивает низкоуровневое управление и контроль аккумулятора и двигателя, за счет чего можно достичь оптимальных характеристик с учетом конкретного сочетания компонентов и конкретных требований применения.
Разъем для заряда аккумулятора может располагаться в любом удобном месте – например, на задней или передней стенке корпуса 16, на корпусе или плате контроллера 18 и т.д. Кроме того, заряд аккумулятора может производиться через внешний разъем 19. Также возможны комбинации, когда заряд одного и того же аккумулятора можно выполнять разными способами. При необходимости внешний разъем 19 может содержать два разъема, один из которых является силовым и предназначен для зарядки аккумулятора и/или питания электродвигателя, а другой для обмена данными и питания контроллера 18.
Корпус
Корпус 16 модуля маршевого двигателя может быть выполнен из любого подходящего материала и при этом должен обладать высокой прочностью. В неограничивающем примере корпус 16 может быть выполнен из металла, дерева или композитных материалов, таких как карбон или стеклоткань. Также возможны различные комбинации карбоновых, стеклотекстолитовых, деревянных и металлических деталей.
Как показано на Фиг. 2-5, корпус 16 содержит заднюю стенку 20, переднюю стенку 21, нижнюю стенку 22 и боковые стенки 23, 24. Кроме того, корпус 20 может содержать верхнюю стенку 25. Верхняя стенка 25, если она есть, может быть съемной или может быть выполнена с возможностью подъема с поворотом (например, с помощью шарниров), чтобы корпус мог полностью открываться сверху для получения доступа к блоку 17 источника энергии для его технического обслуживания, ремонта или замены.
Следует понимать, что термины «задняя» и «передняя» стенка используются для упрощения понимания и для различения стенок между собой. В данном случае подразумевается, что задняя стенка – это стенка, которая расположена позади по ходу движения БПЛА, изображенного на Фиг. 1. Тем не менее, в общем случае, если двигатель расположен в передней части фюзеляжа и направлен вперед, то стенка, которая здесь называется задней, окажется передней по ходу движения БПЛА, поэтому в дальнейшем в отношении этих стенок могут использоваться термины «первая» и «вторая».
Для облегчения конструкции стенки могут быть выполнены из листового материала, в котором выполнены технологические отверстия и вырезы. Возможны также иные варианты осуществления, в которых стенки выполнены сплошными или выполнены в виде рамной, балочной или решетчатой конструкции, собранной из трубок, штырей, балок, профилей и т.д. Стенки могут быть соединены между собой крепежными элементами или посредством сварки, склейки, пайки и т.д. Кроме того, одна или более стенок корпуса могут быть выполнены посредством трехмерной печати или формования.
Для упрощения извлечения и вставки модуля маршевого двигателя корпус может содержать направляющие элементы – например, выступы или продольные канавки на стенках или выступы одних стенок относительно других стенок. Кроме того, внутренние стенки фюзеляжа могут содержать ответные направляющие элементы – например, выступы или продольные канавки. Еще в одном варианте направляющие могут быть выполнены в виде салазок. Направляющие могут иметь ролики, чтобы облегчить скольжение. Направляющие могут иметь ограничитель хода, чтобы препятствовать непреднамеренному выпадению модуля маршевого двигателя при неосторожном изъятии. Направляющие могут иметь фиксатор(ы), чтобы препятствовать повреждению направляющих, модуля маршевого двигателя и фюзеляжа в процессе перемещения модуля маршевого двигателя вдоль направляющих.
Важным элементом корпуса является задняя стенка 20, потому что именно к ней главным образом крепится и маршевый двигатель 10, и блок 17 источника энергии. Блок 17 источника энергии соединен с маршевым двигателем 10 через заднюю стенку 20 для передачи в маршевый двигатель электропитания или топлива. Кроме того, задняя стенка 20 модуля маршевого двигателя фактически является и задней стенкой фюзеляжа, поэтому оказывает воздействие на силовую конструкцию планера. Соответственно, задняя стенка 20 может быть усиленной и иметь большую толщину, чем остальные стенки корпуса. Для этого она может содержать несколько слоев. Задняя стенка 20 может перекрывать все поперечное сечение фюзеляжа в месте соединения (в примере на Фиг. 1 в его задней части), чтобы максимально использовать внутреннее пространство фюзеляжа. Задняя стенка 20 может крепиться к отдельным крепежным элементам и/или к направляющим 26 внутри фюзеляжа, а также к кольцевидному упору 27, выполненному внутри вдоль стенок фюзеляжа в его поперечном сечении, как показано в примере на Фиг. 6. Между задней стенкой 20 и упором 27 может устанавливаться эластичная уплотнительная манжета.
Для обеспечения оптимальной балансировки предлагается осуществлять крепление и маршевого двигателя 10, и блока 17 источника энергии к верхней половине задней стенки 20. Авторы настоящего решения выявили, что такая конструкция обладает повышенной виброустойчивостью, при которой происходит снижение переноса вибраций с двигателя на фюзеляж, причем такой эффект в целом сохраняется даже при малом уровне топлива, когда балансировка немного смещена. Для улучшения балансировки предлагается выполнять в случае с ДВС нижнюю часть задней стенки топливного бака выполнять с наклоном вниз в направлении передней стенки, чтобы топливо скапливалось ближе к передней стенке, а в случае с электродвигателем размещать аккумуляторную сборку ближе к передней стенке. Для дополнительного гашения вибраций двигателя, блока источника энергии и корпуса могут использоваться вибровставки, муфты, прокладки, демпферы и т.д., устанавливаемые на стенках корпуса. Направляющие элементы на корпусе и/или направляющие элементы на стенках фюзеляжа также могут быть выполнены из эластичных материалов. Кроме того, стенки корпуса могут не просто содержать антивибрационные элементы, а целиком быть выполнены из эластичного материала. Например, размещение контроллера и внешнего разъема в собственном корпусе в задней стенке, выполненной целиком из эластичного материала, позволяет существенно снизить вибрацию платы контроллера и тем самым снизить процент отказов, увеличить безопасность полетов и продлить срок его службы. Также уменьшение вибраций позволяет уменьшить ошибки траектории, снизить расход топлива/электроэнергии и увеличить качество изображения и качество мониторинга. Более того, подобная виброзащита позволяет предотвратить негативные последствия в случае возникновения нештатной ситуации и падения аппарата.
Наличие задней стенки корпуса является обязательным в предложенном решении – хотя бы в виде рамного элемента. Наличие остальных стенок корпуса не является обязательным. Например, в одном из вариантов осуществления корпус 16 содержит только заднюю стенку, к которой крепятся и маршевый двигатель 10, и блок 17 источника энергии, и контроллер 18, а направляющие и антивибрационные элементы располагаются на блоке 17 источника энергии. В других вариантах осуществления корпус 16 может содержать заднюю стенку и боковые стенки или заднюю стенку и нижнюю стенку в сочетании с передней стенкой или без нее. Одна или более из боковых, верхней и нижней стенок корпуса 16 могут быть заменены на продольные штыри, соединенные с задней стенкой.
Пример
Опытные образцы предложенного модуля маршевого двигателя изготовлены и протестированы авторами в различных вариантах исполнения: как с двигателем внутреннего сгорания и топливным баком, так и с электродвигателем и аккумуляторной сборкой; как с верхней стенкой корпуса, так и без нее. Боковые стенки, верхняя и нижняя стенки корпуса изготавливались из листового стеклотекстолита толщиной 3 мм. Задняя стенка корпуса содержала три слоя: два слоя из листового стеклотекстолита толщиной 3 мм и третий слой между ними из фанеры толщиной 10 мм, соединенные между собой клеем и винтовым соединением. Задняя стенка крепилась к кольцевидному упору в фюзеляже с использованием болтового соединения и уплотнительной манжеты. На боковых стенках были выполнены продольные направляющие выступы для вставки в продольные направляющие на стенках фюзеляжа. Передняя стенка выполнялась целиком из эластичного материала и содержала корпус контроллера, в котором был размещен контроллер. Соединение контроллера со всеми остальными компонентами выполнялось посредством проводов. Первый внешний разъем размещался на корпусе контроллера. Двигатель крепился к задней стенке через резиновые демпферы. Выше крепления двигателя в задней стенке выполнялось отверстие, через которое выводился второй внешний разъем для диагностических целей и зарядки в случае с электродвигателем или второй внешний разъем для диагностических целей и трубка для заправки топлива в случае с ДВС. В качестве топливного бака в случае с ДВС использовался изготовленный на заказ пластиковый бак требуемой формы с полупрозрачными стенками. Помимо деталей собственного производства в опытных образцах использовались типовые вычислители, датчики, ДВС, электродвигатели, регуляторы скорости вращения и прочие компоненты. Испытания продемонстрировали повышенную скорость и простоту сборки-разборки, дозаправки/зарядки, технического обслуживания и подготовки БПЛА к эксплуатации и соответствие заявленным характеристикам, в том числе повышенную надежность, безопасность и удобство использования.
Применение
Устройства и системы согласно настоящему решению можно использовать для производства и эксплуатации беспилотных летательных аппаратов для различных целей, в том числе для мониторинга территорий.
Дополнительные особенности реализации
Различные иллюстративные блоки и модули, описанные в связи с раскрытием сущности в данном документе, могут реализовываться или выполняться с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства (PLD), дискретного логического элемента или транзисторной логики, дискретных аппаратных компонентов либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте, процессор может представлять собой любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может реализовываться как комбинация вычислительных устройств (к примеру, комбинация DSP и микропроцессора, несколько микропроцессоров, один или более микропроцессоров вместе с DSP-ядром либо любая другая подобная конфигурация).
Некоторые блоки или модули по отдельности или вместе могут представлять собой, например, процессор, который сконфигурирован для вызова и выполнения компьютерных программ из памяти для выполнения этапов способа или функций блоков или модулей в соответствии с вариантами осуществления настоящего решения. Согласно вариантам осуществления, устройство может дополнительно включать в себя память. Процессор может вызывать и выполнять компьютерные программы из памяти для выполнения способа. Память может быть отдельным устройством, независимым от процессора, или может быть интегрирована в процессор. Память может хранить код, инструкции, команды и/или данные для исполнения на наборе из одного или более процессоров описанного устройства. Коды, инструкции, команды могут предписывать процессору выполнять этапы способа или функции устройства.
Функции, описанные в данном документе, могут реализовываться в аппаратном обеспечении, программном обеспечении, выполняемом посредством одного или более процессоров, микропрограммном обеспечении или в любой комбинации вышеозначенного, если это применимо. Аппаратные и программные средства, реализующие функции, также могут физически находиться в различных позициях, в том числе согласно такому распределению, что части функций реализуются в различных физических местоположениях, то есть может выполняться распределенная обработка или распределенные вычисления.
Вышеупомянутая память может быть энергозависимой или энергонезависимой памятью или может включать в себя как энергозависимую, так и энергонезависимую память. Специалисту в области техники должно быть также понятно, что, когда речь идет о памяти и о хранении данных, программ, кодов, инструкций, команд и т.п., подразумевается наличие машиночитаемого (или компьютерно-читаемого, процессорно-читаемого) запоминающего носителя. Машиночитаемый запоминающий носитель может представлять собой любой доступный носитель, который может использоваться для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера, процессора или иного устройства обработки общего назначения или специального назначения.
Следует понимать, что хотя в настоящем документе для описания различных элементов, компонентов, областей, слоев и/или секций могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, компонента, области, слоя или секции. Так, первый элемент, компонент, область, слой или секция может быть назван вторым элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего решения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле данного решения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле данного решения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее решение, и что данное решение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления данного решения, не выходящие за пределы сущности и объема данного решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ МАРШЕВОГО ДВИГАТЕЛЯ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ ДЛЯ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА САМОЛЕТНОГО ТИПА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2834329C1 |
| ФЮЗЕЛЯЖ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2838934C1 |
| ФЮЗЕЛЯЖ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2838933C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО САМОЛЕТНОГО ТИПА | 2024 |
|
RU2839005C1 |
| ФЮЗЕЛЯЖ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2024 |
|
RU2838986C1 |
| ЦЕНТРОПЛАН КРЫЛА БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2838985C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО САМОЛЕТНОГО ТИПА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) И СПОСОБ ЕГО СБОРКИ | 2024 |
|
RU2831842C1 |
| БАЛКА БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА САМОЛЕТНОГО ТИПА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2830728C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ ЕГО СБОРКИ | 2024 |
|
RU2830724C1 |
| КРЫЛО БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА САМОЛЕТНОГО ТИПА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (VTOL) | 2024 |
|
RU2830730C1 |
Изобретение относится к летательным аппаратам, в частности к конструкции двигательной установки беспилотного летательного аппарата. Модуль маршевого двигателя с электродвигателем содержит корпус, электродвигатель, аккумулятор, предназначенный находиться внутри фюзеляжа и размещенный с обратной стороны первой стенки корпуса от маршевого двигателя, причем аккумулятор соединен с маршевым двигателем через первую стенку для передачи в маршевый двигатель электроэнергии, причем аккумулятор содержит датчики тока и напряжения, контроллер, соединенный с маршевым двигателем и с аккумулятором и выполненный с возможностью приема сообщений от внешних устройств, приема данных о состоянии от маршевого двигателя и аккумулятора, отправки запросов и команд на маршевый двигатель и аккумулятор и отправки сообщений на внешние устройства, причем обмен сообщениями с внешними устройствами выполняется через программный интерфейс. Техническим результатом является упрощение и ускорение процессов сборки/разборки, транспортировки, заправки/зарядки, технического обслуживания и подготовки БПЛА к эксплуатации. 9 з.п. ф-лы, 6 ил.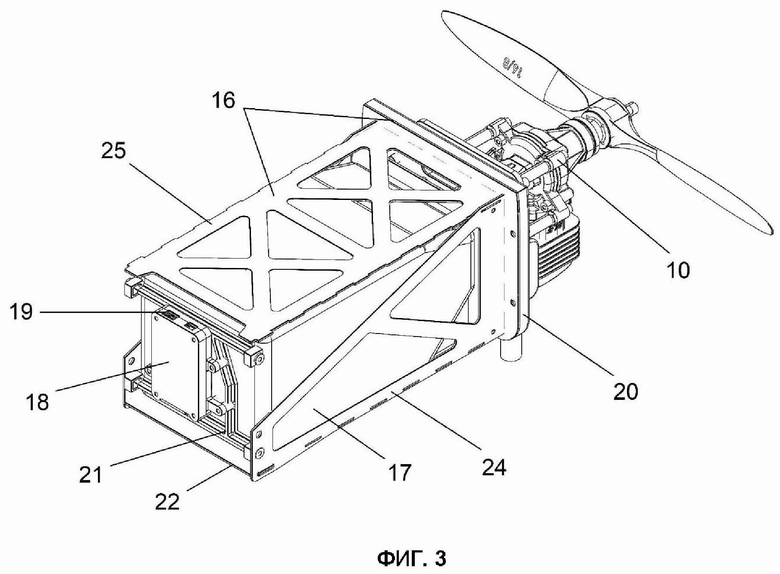
1. Модуль маршевого двигателя с электродвигателем для беспилотного воздушного судна самолетного типа с вертикальным взлетом и посадкой (VTOL), содержащий:
корпус, содержащий одну или более стенок, причем первая стенка корпуса выполнена с возможностью соединения с фюзеляжем VTOL;
маршевый двигатель для VTOL, прикрепленный к первой стенке корпуса и предназначенный находиться снаружи фюзеляжа, причем маршевым двигателем является электродвигатель;
аккумулятор, предназначенный находиться внутри фюзеляжа и размещенный с обратной стороны первой стенки корпуса от маршевого двигателя, причем аккумулятор соединен с маршевым двигателем через первую стенку для передачи в маршевый двигатель электроэнергии, причем аккумулятор содержит датчики тока и напряжения; и
контроллер, соединенный с маршевым двигателем и с аккумулятором и выполненный с возможностью приема сообщений от внешних устройств, приема данных о состоянии от маршевого двигателя и аккумулятора, отправки запросов и команд на маршевый двигатель и аккумулятор и отправки сообщений на внешние устройства, причем обмен сообщениями с внешними устройствами выполняется через программный интерфейс (API).
2. Модуль маршевого двигателя по п. 1, в котором маршевый двигатель прикреплен к верхней половине первой стенки корпуса, причем аккумулятор размещен вблизи второй стенки корпуса, которая является противоположной для первой стенки корпуса.
3. Модуль маршевого двигателя по п. 1, в котором стенки корпуса и/или стенки аккумулятора содержат направляющие элементы для взаимодействия с ответными направляющими элементами на стенках фюзеляжа для извлечения и вставки модуля маршевого двигателя в фюзеляж.
4. Модуль маршевого двигателя по п. 1, в котором стенки корпуса и/или стенки аккумулятора содержат антивибрационные элементы, маршевый двигатель и аккумулятор прикреплены к стенкам корпуса через демпферы, первая стенка корпуса выполнена с возможностью соединения с фюзеляжем через уплотнительную манжету.
5. Модуль маршевого двигателя по п. 1, в котором первая стенка корпуса выполнена из двух слоев стеклотекстолита и одного слоя фанеры, расположенного между ними, причем толщина слоя фанеры больше толщины слоев стеклотекстолита, причем первая стенка корпуса выполнена с возможностью перекрывать все поперечное сечение фюзеляжа в месте его соединения с первой стенкой корпуса.
6. Модуль маршевого двигателя по п. 1, в котором контроллер выполнен с возможностью управления двигателем на основе сообщений, принимаемых от внешнего устройства через API, приема данных об уровне тока и напряжения от аккумулятора и данных о числе оборотов от маршевого двигателя, передачи данных через API на внешнее устройство, а также контроля процесса заряда аккумулятора.
7. Модуль маршевого двигателя по п. 1 или 6, в котором внешними устройствами являются полетный контроллер VTOL, бортовая сеть VTOL, бортовая шина данных VTOL и/или диагностическое устройство.
8. Модуль маршевого двигателя по п. 1, дополнительно содержащий по меньшей мере один внешний разъем, соединенный с контроллером и предназначенный для осуществления электропитания контроллера и обмена данными контроллера с внешними устройствами путем их присоединения через ответный разъем.
9. Модуль маршевого двигателя по п. 8, в котором контроллер расположен в корпусе контроллера, выполненном на второй стенке корпуса модуля маршевого двигателя, причем имеется по меньшей мере два внешних разъема, причем по меньшей мере один внешний разъем расположен в корпусе контроллера, а по меньшей мере один другой внешний разъем расположен на первой стенке корпуса модуля маршевого двигателя.
10. Модуль маршевого двигателя по п. 1, в котором контроллер расположен в корпусе контроллера, выполненном на второй стенке корпуса модуля маршевого двигателя, причем вторая стенка корпуса модуля маршевого двигателя целиком выполнена из эластичного материала.
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2495797C2 |
| СПОСОБ СТАБИЛИЗАЦИИ АМПЛИТУДЫ КОЛЕБАНИЙ ХРОНИРУЮЩЕГО СИГНАЛА | 0 |
|
SU181389A1 |
| Беспилотный летательный аппарат с комбинированной двигательной установкой и изменяемой конфигурацией планера БЛА | 2016 |
|
RU2637278C1 |
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 2019 |
|
RU2705857C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |

