Изобретение относится к беспилотной технике. Преимущественная область применения изобретения в качестве воздушного движителя беспилотного летательного аппарата (БПЛА) для геофизической разведки.
Известна электрическая силовая установка на базе литий-полимерных аккумуляторов, которая содержит: безколлекторный электродвигатель, воздушный винт постоянного шага, расположенный на валу электродвигателя, регулятор оборотов электродвигателя, батареи литий-полимерных аккумуляторов (http://www.avmodels.ru/engines/electric/motosetup.html, http://www.rcdesign.ru).
Недостатком этой установки является малая удельная энергия системы и низкий КПД и, как следствие, малый радиус действия БПЛА.
Общими признаками аналога и изобретения являются электродвигатель с воздушным винтом постоянного шага и контроллер электродвигателя.
Известна силовая установка беспилотного летательного аппарата Skylark(R) I-LE (callcenterinfo.tmcnet.com) на базе источника электроэнергии AEROPAK (www.hes.sg), разработанного Сингапурской фирмой «Horizon Energy Systems». Эта установка принята за прототип изобретения и содержит: маршевый электродвигатель 1, на оси которого жестко закреплен маршевый воздушный винт 12, баллон 5 с водородом с герметично закрепленным на нем редуктором 6, батарея 8 топливных элементов, вентиляторы 7 для охлаждения батареи 8 топливных элементов, датчики температуры 22, клапан 9 для продувки водородных каналов, который установлен между торцом батареи топливных элементов и системой 10 управления маршевым электродвигателем 11, которая включает контроллер 19 маршевого электродвигателя 11, ключ 20 запуска маршевого электродвигателя 11, контроллер 21 батареи 8 топливных элементов. Контроллер 19 имеет вход электропитания и вход управляющего сигнала и один выход электропитания маршевого электродвигателя 12, контроллер 21 батареи 8 топливных элементов имеет четыре входа: вход ключа 20, вход электропитания и два входа сигналов датчиков температуры 22 и четыре выхода: выход управляющего сигнала на контроллер маршевого электродвигателя 11, выход сигнала управления клапаном 9, выходы электропитания вентиляторов 7. Вход питания контроллера батареи 21 соединен с выходом электропитания батареи 8 топливных элементов, выход контроллера батареи 21 электропитания клапана 9 соединен с входом этого клапана, сигнальный выход контроллера батареи 21 соединен с соответствующим входом контроллера 19 маршевого электродвигателя 11, выход электропитания контроллера 19 маршевого электродвигателя 11 соединен с входом электропитания этого электродвигателя, выходы сигналов датчиков температуры соединены с соответствующими входами контроллера 21 батареи, выходы контроллера 21 электропитания вентиляторов 7 соединены с входами этих вентиляторов, вход питания контроллера (19) маршевого двигателя 11 соединен с выходом питания батареи топливных элементов 8. Перечисленные признаки являются общими с признаками изобретения.
Недостатком прототипа является низкий КПД, обусловленный применением одного воздушного винта с фиксированным шагом, закрепленным на валу электродвигателя, которые обеспечивают максимальный КПД только в одном режиме полета. При условии обеспечения максимальной мощности на режиме старта режим максимального КПД силовой установки-прототипа не реализуется в режиме наиболее энергоемкого крейсерского полета БПЛА.
Техническим результатом изобретения является увеличенный КПД электрической силовой установки на 10-25% за счет применения в ней двух воздушных винтов с оптимальными шагами для их режимов работы и двух электродвигателей в режимах их максимальных КПД.
Изобретение поясняется чертежами.
На фиг.1 приведен общий вид беспилотного летательного аппарата с размещенной на нем электрической силовой установкой (ЭСУ).
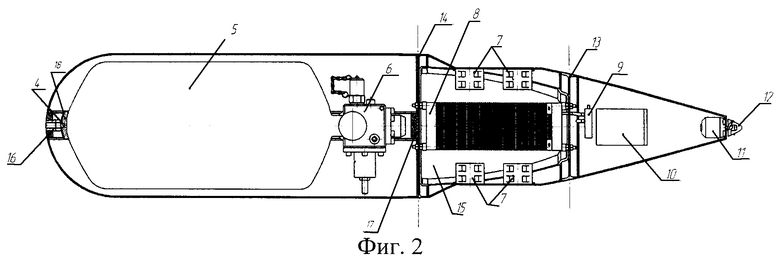
На фиг.2 приведена конструкция гондолы ЭСУ в разрезе (вид сверху).
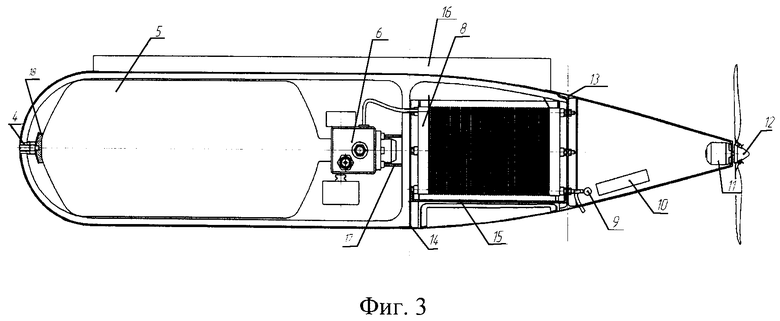
На фиг.3 приведена конструкция гондолы ЭСУ в разрезе (вид сбоку).
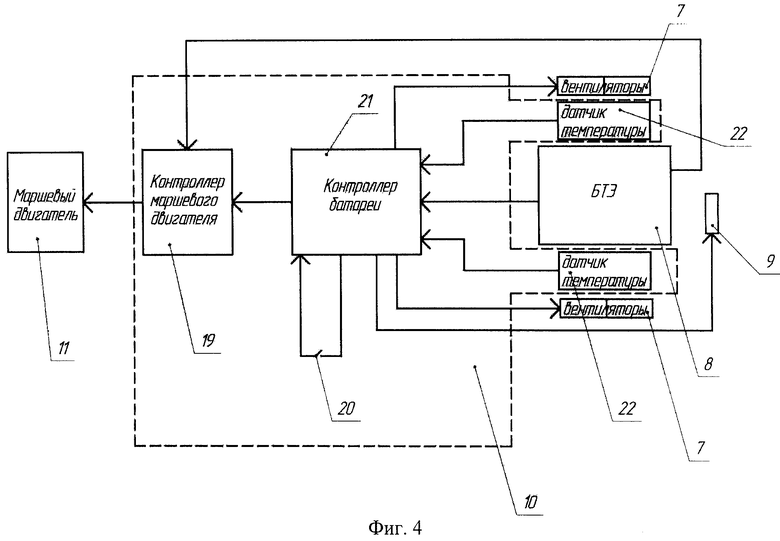
На фиг.4 приведена структурная схема системы управления маршевым электродвигателем.
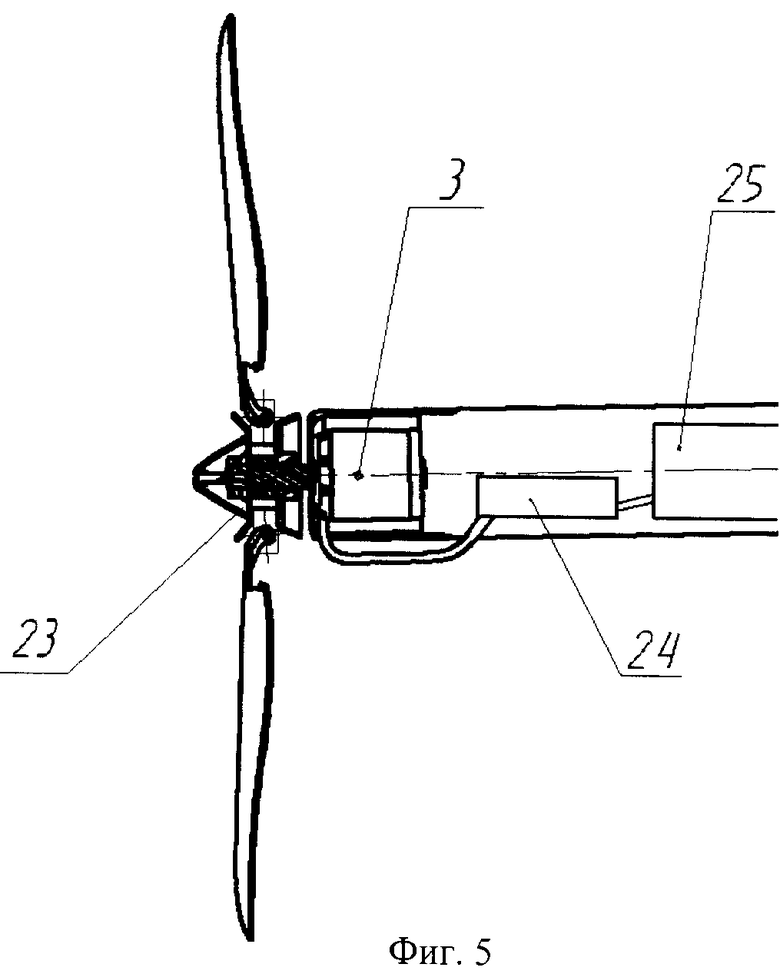
На фиг.5 приведен вид сбоку стартового воздушного винта и стартового двигателя ЭСУ.
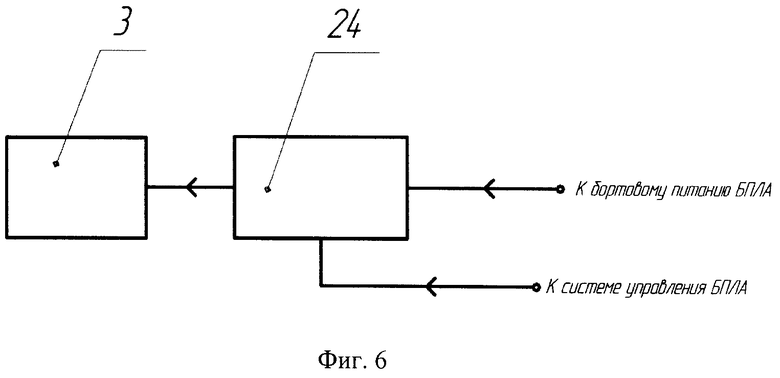
На фиг.6 приведена структурная схема управления стартовым электродвигателем.
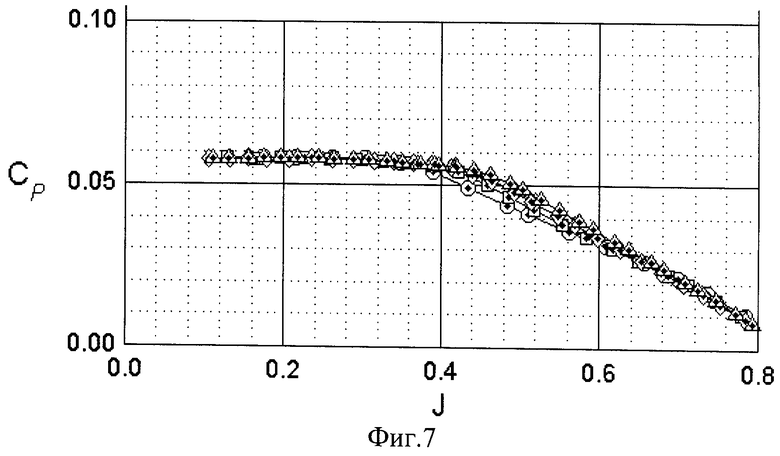
На фиг.7 приведен график зависимости коэффициента мощности воздушного винта - CP(J) от значений относительной поступи воздушного винта - J.
На фигурах введены обозначения: 1 - гондола, 2 - пилон, 3 - стартовый двигатель, 4 - прижимной винт, 5 - баллон с водородом, 6 - редуктор, 7 - вентиляторы, 8 - батарея топливных элементов, 9 - клапан, 10 - система управления маршевым электродвигателем, 11 - маршевый электродвигатель, 12 - маршевый воздушный винт, 13 - задний силовой шпангоут, 14 - передний силовой шпангоут, 15 - пол отсека батареи, 16 - силовая рама, 17 - стакан, 18 - тарелка, 19 - контроллер маршевого электродвигателя, 20 - ключ запуска маршевого электродвигателя, 21 - контроллер батареи топливных элементов, 22 - датчики температуры, 23 - стартовый воздушный винт, 24 - контроллер стартового электродвигателя, 25 - бортовая аккумуляторная батарея БПЛА.
Технический результат изобретения достигается благодаря тому, что электрическая силовая установка содержит: гондолу 1, стартовый электродвигатель 3, стартовый воздушный винт 23, баллон 5 с водородом, редуктор 6, два вентилятора 7, батарею 8 топливных элементов, клапан 9 продувки водородных каналов, систему управления маршевым электродвигателем 10, маршевый электродвигатель 11, маршевый воздушный винт 12, контроллер маршевого электродвигателя 19, ключ запуска маршевого электродвигателя 20, контроллер батареи топливных элементов 21, два датчика температуры 22, стартовый воздушный винт 23, контроллер стартового электродвигателя 24 (фиг.1-6).
Гондола 1 служит для размещения элементов силовой установки и имеет хорошо обтекаемую форму, например форму вытянутой капли, материалом которой может служить трехслойный стеклокомпозит (фиг.1).
В гондоле 1 на силовой раме 16 размещены и жестко закреплены: передний 14 и задний 13 шпангоуты, у хвоста соосно оси гондолы установлен маршевый электродвигатель 11 с маршевым воздушным винтом 12 закрепленным на его оси. В передней части гондолы с помощью прижимного винта 4 и тарелки 18 соосно оси гондолы закреплены баллон с водородом и установленный на баллоне редуктор. Между передним 14 и задним 13 шпангоутами на шпильках закреплена батарея топливных элементов. К обшивке гондолы в районе батареи топливных элементов прикреплены при помощи клеевого соединения вентиляторы 7. В хвостовой части гондолы размещены также система управления батареей топливных элементов 10 и клапан 9 продувки водородных каналов, которые могут быть закреплены на обшивке гондолы, например, при помощи клеевого соединения.
Пилон 2 служит для крепления гондолы к беспилотному летательному аппарату (БПЛА) и может быть выполнен, например, из угле- и стеклокомпозитных материалов и жестко крепиться на силовой раме (16) шпильками или винтами (фиг.1).
Стартовый электродвигатель 3 требуемой мощности обеспечивает вращение стартового воздушного винта 23 (фиг.1) с оптимальным шагом в режиме взлета - наборе высоты БПЛА. Электродвигатель 3 покупное изделие, размещается в корпусе планера БПЛА соосно его продольной оси, на месте, предусмотренном его конструкцией. Стартовый электродвигатель управляется с помощью контроллера стартового электродвигателя 24 (Фиг.6). Шаг стартового винта рассчитывается из условия обеспечения максимальной мощности на режиме взлета и находится из системы уравнений (1) с использованием экспериментальных данных о параметрах воздушного винта в виде графика зависимости коэффициента мощности воздушного винта - CP(J) от значений относительной поступи воздушного винта - J (фиг.7).
где W - максимальная полезная мощность электродвигателя, CP(J) - коэффициент мощности воздушного винта при некотором значении относительной поступи винта J, ρ - плотность воздуха, n - частота вращения вала двигателя, D - диаметр воздушного винта, J - относительная поступь воздушного винта.
Лопасти воздушных винтов крепятся к их втулкам, которые закреплены жестко на осях электродвигателей, подвижно на подшипнике скольжения с возможностью сложения по направлению воздушного потока,
Воздушные винты могут быть применены стандартные, например, типа Graupner с требуемым шагом.
Прижимной винт 4 служит для жесткого крепления баллона с водородом между стаканом 17 и тарелкой 18, которая прижимает баллон 5 с редуктором 6 к стакану 17.
Баллон 5 для водорода предназначен для хранения запаса газообразного топлива под давлением и размещается в передней части гондолы 1 (покупное изделие, стандартное).
Редуктор 6 предназначен для снижения давления на входе в батарею топливных элементов 8, жестко крепится к головке баллона 5 (покупное изделие, стандартное).
В качестве вентиляторов 7 могут быть применены, например, вентиляторы типа jamicon мощностью 2,8 Вт каждый.
Батарея топливных элементов 8 служит для получения электрической энергии при протекании химической реакции водорода с кислородом воздуха. Может быть использовано, покупное изделие, например AEROPAK (www.hes.sg).
Клапан 9 служит для обеспечения продувки водородных каналов батареи топливных элементов и может быть использован нормально-закрытый стандартный электромагнитный клапан.
Система управления маршевым электродвигателем 10 (фиг.4) состоит из контроллера маршевого электродвигателя 19, который служит для управления оборотами маршевого электродвигателя 11, контроллера 21 батареи 8 с датчиками температуры 22. Контроллер 21 батареи управляет работой вентилятора 7, основываясь на показаниях датчиков температуры 22, и формирует управляющий сигнал для контроллера маршевого электродвигателя в зависимости от напряжения на батарее топливных элементов 8.
Контроллер 19 маршевого электродвигателя 11 имеет два входа:
электропитание и управление, и один выход: электропитание электродвигателя 11.
Работой маршевого электродвигателя 11 управляет система управления БПЛА, которая по ее сигналу замыкает ключ 20, включающий электродвигатель 11. Стартовый электродвигатель 3, включает непосредственно система управления БПЛА, подавая управляющий сигнал на контроллер 24 стартового двигателя 3 (фиг.6).
Маршевый электродвигатель 11 служит для обеспечения необходимой для горизонтального полета БПЛА мощности на маршевом воздушном винте 12. В качестве электродвигателя может быть использован безколлекторный электродвигатель, например, типа AXI. Маршевый электродвигатель 11 жестко крепится на винтах к обшивке гондолы в хвостовой части гондолы соосно ее продольной оси.
Маршевый воздушный винт 12 выполнен толкающим и служит для обеспечения пропульсивной силы в режиме крейсерского полета и может быть выполнен из углепластика.
Шаг винта определяется из решения системы уравнений (1), которое обеспечивает максимальный КПД системы электродвигатель + воздушный винт на скорости крейсерского полета.
Задний силовой шпангоут 13 может быть выполнен из стеклотекстолита и служит для крепления батареи топливных элементов и закреплен на силовой раме 4, обшивке гондолы 1 и через пол отсека батареи 15 связан с передним силовым шпангоутом 14.
Передний силовой шпангоут 14 может быть выполнен из стеклотекстолита и служит для крепления батареи топливных элементов и крепления обшивки гондолы 1 (является формообразующим элементом) и жестко закреплен на силовой раме 16 при помощи клеевого соединения.
Пол 15 отсека батареи 8 может быть выполнен из трехслойного стеклокомпозита, и служит для уменьшения нагрузки на обшивку гондолы под отсеком батареи.
Силовая рама 16 предназначена для крепления основных элементов конструкции и может быть выполнена из стеклокомпозита. К силовой раме на винтах жестко крепится обшивка гондолы.
Стакан 17 служит для крепления баллона 5 на силовой раме, и жестко крепится к силовой раме 16 и переднему силовому шпангоуту 14 на винтах, и может быть выполнен, например, из сплава Д16Т.
Тарелка 18 служит для перераспределения нагрузки от прижимного винта 4 на баллон 5 и выполнена, например, из дюралюминия с резиновой накладкой на внутренней стороне тарелки и крепится к прижимному винту подвижно на подшипнике скольжения.
Контроллер 19 маршевого электродвигателя 12 служит для управления его оборотами. И крепится внутри конусного обтекателя к обшивке гондолы при помощи клеевого соединения. Контроллер 19 имеет два входа электропитания и управляющего сигнала и один выход электропитания маршевого электродвигателя 12.
Ключ 20 представляет собой нормально открытый контакт, замыкаемый электронным способом системой управления БПЛА, при замыкании которого, происходит включение электропитания маршевого электродвигателя 11.
Контроллер 21 батареи топливных элементов 8 служит для обеспечения оптимального режима продолжительной работы ее топливных элементов. Контроллер 21 имеет 4 входа: сигнала с выхода ключа 20, электропитания, сигналов с двух датчиков температуры и 4 выхода: управляющего сигнала на контроллер 19 маршевого двигателя 11, сигнал управления клапаном 9, электропитание вентиляторов 7.
Датчик температуры 22 служит для измерения температуры воздуха, выходящего из батареи топливных элементов, имеет выход его сигнала, жестко крепится на корпусе батареи топливных элементов, например, при помощи клеевого соединения.
Стартовый воздушный винт 23 служит для обеспечения необходимой мощности при наборе заданной высоты БПЛА, а также для выполнения различных маневров. Лопасти стартового воздушного винта 23 крепятся к втулке винта на подшипниках скольжения с возможностью их складывания набегающим потоком воздуха при выключенном электродвигателе 3. При включении электродвигателя 3 лопасти воздушного винта 23 под действием центробежной силы принимают рабочее положение.
Контроллер 24 стартового электродвигателя 3 служит для управления этим двигателем и крепится к корпусу БПЛА при помощи клеевого соединения имеет входы электропитания и управляющего сигнала и выход электропитание стартового электродвигателя 3.
Аккумуляторная батарея 25 БПЛА служит для обеспечения стартового электродвигателя электроэнергией, она устанавливается внутри корпуса БПЛА и защищена от смещения силой трения покоя.
Контроллер 21 (фиг.4) батареи топливных элементов имеет 4 входа: ключа 20, электропитания и сигналов двух датчиков температуры 22 и 4 выхода: управляющего сигнала на контроллер маршевого электродвигателя 11, сигнала управления клапаном 9, электропитания вентиляторов 7.
Контроллер 19 (фиг.4) маршевого двигателя 11 служит для управления оборотами маршевого двигателя, крепится внутри конусного обтекателя к обшивке гондолы при помощи клеевого соединения. Контроллер 19 имеет два входа электропитания и управляющего сигнала и выход электропитания электродвигателя 11 маршевого воздушного винта 12.
Контроллер 24 (фиг.6) стартового электродвигателя 3 имеет 2 входа:
электропитания и управляющего сигнала и выход электропитания стартового электродвигателя 3.
Батарея 8 топливных элементов (фиг.4) имеет выход электропитания и выход управляющего сигнала контроллером маршевого двигателя.
Выход ключа 20 (фиг.4) соединен с входом контроллера 21 этого ключа.
Вход питания контроллера батареи 21 (фиг.4) соединен с выходом электропитания батареи 8 топливных элементов, выход которой соединен с входом контроллера 19 маршевого электродвигателя 11.
Выход контроллера батареи 21 электропитания клапана 9 соединен с входом этого клапана.
Выход контроллера батареи 21 электропитания контроллера маршевого электродвигателя 11 соединен с входом электропитания контроллера этого двигателя.
Выход электропитания контроллера 19 маршевого электродвигателя 11 соединен с входом электропитания этого электродвигателя.
Выходы сигналов датчиков температуры соединены с соответствующими входами контроллера 21 батареи.
Выходы контроллера 21 электропитания вентиляторов 7 соединены с входами этих вентиляторов.
Выход электропитания контроллера 24 стартового двигателя 3 соединен с входом этого электродвигателя,
Вход контроллера 24 (фиг.6) системы управления БПЛА соединен с выходом этой системы управления.
Вход электропитания контроллера 24 стартового двигателя 3 соединен с выходом электропитания аккумуляторной батареи БПЛА 25 (фиг.5, 6).
При старте БПЛА его система управления замыкает ключ 20, что приводит к включению электропитания маршевого электродвигателя 11 и подает сигнал на контроллер стартового электродвигателя 3, который включает этот электродвигатель. Данный режим работы обеспечивает максимальную мощность, требуемую для набора заданной высоты полета БПЛА. После набора высоты БПЛА переходит в крейсерский режим полета, в котором он имеет максимальное аэродинамическое качество. Этот режим реализуется при определенной скорости для каждого конкретного БПЛА. Крейсерский полет проходит на одной высоте, без изменения эшелона.
После набора высоты система управления БПЛА выключает электродвигатель 3. При отключенном стартовом электродвигателе лопасти стартового воздушного винта 23 складываются воздушным потоком, тем самым минимизируется лобовое сопротивление, а маршевый электродвигатель 11 продолжает работу.
Принципиальное отличие изобретения от прототипа состоит в том, что электрическая силовая установка прототипа с одним электродвигателем на взлетном режиме работает при 100% мощности электродвигателя, при этом КПД безколлекторного электродвигателя составляет около 50%. Максимальный КПД безколлекторного электродвигателя реализуется при 60-70% от его максимальной мощности и составляет 85-92%. Для крейсерского полета БПЛА - прототипа, имеющего высокие взлетнно-посадочные характеристики и высокое аэродинамическое качество, необходимо не более 20-30% от мощности электродвигателя. На этом режиме работы электродвигатель имеет низкий КПД не более 50%. При использовании двух электродвигателей в ЭСУ, маршевый электродвигатель подбирается таким образом, чтобы в процессе крейсерского полета он работал в режиме максимального КПД (60-70% номинальной мощности электродвигателя). Кроме того, шаг маршевого воздушного винта подбирается из условия максимизации КПД на режиме крейсерского полета и не зависит от условий старта БПЛА. Поэтому, в крейсерском режиме, ЭСУ имеет максимальный КПД маршевого электродвигателя 11 и маршевого воздушного винта 12.
При совершении различных маневров и при недостатке мощности электродвигателя 12, система управления БПЛА включает в работу электродвигатель 3, работающий от аккумуляторной батареи 25. При включенном электродвигателе 3 лопасти воздушного винта 23 в стартовом режиме силовой установки раскрываются под действием центробежной силы.
После завершения маневра система управления выключает электродвигатель 3, а лопасти его воздушного винта 23 складываются набегающим потоком воздуха.
При заходе на посадку выключаются оба электродвигателя, а лопасти их винтов складываются по потоку, что предотвращает их повреждение при посадке БПЛА.
В процессе работы ЭСУ химическая энергия топлива преобразуется в электрическую энергию напрямую. На электродах происходят химические реакции, протоны, полученные при ионизации водорода на катализаторе, проходят через протонообменную мембрану, а электроны проходят через силовую электрическую цепь, обеспечивая электропитание маршевого двигателя 11.
В составе ЭСУ имеются два электродвигателя с воздушными винтами, она имеет максимальный КПД в режиме крейсерского полета, когда работает маршевый двигатель 11 с его воздушным винтом 12. Например, в режиме взлета обеспечивается максимальная мощность двигателей с их воздушными винтами, а на режиме крейсерского полета - максимальный КПД маршевого воздушного винта 12 и его электродвигателя 11.
При полете БПЛА на дальность последовательно реализуются 3 режима: набор высоты, крейсерский полет и посадка на парашюте. При наборе высоты ЭСУ работает с максимальной мощностью, так как работают два двигателя и два воздушных винта на режиме максимальной мощности двигателей. Во втором режиме ЭСУ имеет больший КПД, чем КПД прототипа, поскольку маршевый двигатель и винт рассчитаны исключительно на этот режим и не должны обеспечивать требуемые для взлета характеристики.
В режиме посадки БПЛА ЭСУ отключается системой управления БПЛА.
Отличительными признаки изобретения являются признаки перечисленные ниже.
Стартовый электродвигатель 3, на оси которого жестко закреплен стартовый воздушный винт 23.
Контроллер 24 стартового электродвигателя 3, который имеет вход бортового электропитания, вход сигнала от системы управления БПЛА и выход электропитания стартового электродвигателя 3, причем выход электропитания контроллера 24 стартового электродвигателя 3 соединен с входом этого электродвигателя.
Гондола 1, в которой установлены: маршевый электродвигатель 11, маршевый воздушный винт 12, баллон 5 с водородом, редуктор 6, батарея 8 топливных элементов, вентиляторы 7, датчики температуры 22, клапан 9, ключ 20, контроллер 21 батареи 8 топливных элементов.
Маршевый воздушный винт 12 выполнен толкающим.
Изобретение реализовано в соответствии с чертежами фиг.1-6.
Гондола 1 (фиг.1) выполнена из трехслойного стеклокомпозита в форме вытянутой капли и имеет габариты: диаметр 200 мм, длина 980 мм.
Пилон 2 (фиг.1) выполнен в форме плавного сопряжения крыла с профилированным пилоном (профиль NACA-0007) из угле- стеклокомпозитного материала (углеткань марки С-93, стеклоткань G-69)
и имеет габариты: длина 425 × ширина 100 × высота 70, толщина стенок 2 мм.
Стартовый электродвигатель 3 типа AXI мощностью 2 кВт с числом 9000 об/мин, размещен в корпусе БПЛА соосно его продольной оси.
Прижимной винт 4 с резьбой М 6, длиной 50 мм выполнен из материала Ст3.
Баллон 5 для водорода типа БМК-300В-5 емкостью 5 дм3.
Редуктор 6 типа Drukon DS1.
Вентиляторы 7 типа jamicon мощностью 2,8 Вт.
Батарея 8 топливных элементов типа AEROPAK (www.hes.sg), имеет напряжение 36 В.
Нормально-закрытый электромагнитный клапан 9 стандартный типа MicroPump Система управления 10 маршевым электродвигателем 23 (фиг.5) состоит из контроллера типа Marcus, контроллера батареи 21 разработанного на базе микроконтроллера Freeduino, датчиков температуры 22 типа Dallas и клапана 9 типа MicroPump.
Маршевый электродвигатель 11 типа AXI, мощностью 0,4 кВт с числом 16000 об/мин.
Воздушный винт 12 (фиг.1) типа Graupner, диаметр 22 мм и шаг 14,7 мм. Задний силовой шпангоут 13 (фиг.2) выполнен из стеклотекстолита типа СТЭФ, имеет габариты: диаметр 150 мм × ширина 22 мм.
Передний силовой шпангоут 14 (фиг.14) выполнен из стеклотекстолита типа СТЭФ, имеет габариты: диаметр 198 мм × ширина 12 мм.
Пол отсека батареи 15 (фиг.3) выполнен из трехслойного стеклокомпозита типа G-69, имеет габариты: длина 209 × ширина 165 × высота 12, мм.
Силовая рама 16 выполнена из стеклокомпозита марки G-69 имеет габариты: длина 650 × ширина 36 × высота 217, мм.
Стакан 17 (фиг.3) имеет цилиндрическую форму, выполнен из сплава Д16Т, имеет габариты: высота 22 × диаметр 34 мм.
Тарелка 18 выполнена круглой формы из дюралюминия с резиновой накладкой на ее внутренней стороне, имеет габариты: толщина 3 × диаметр 40 мм.
Контроллер 19 (Фиг.4) маршевого двигателя типа Markus.
Ключ 20 представляет собой нормально открытый медный контакт.
Контроллер 21 батареи топливных элементов типа Freeduino.
Датчик температуры 22 (фиг.4) типа Dallas.
Стартовый воздушный винт 23 (фиг.5) типа Graupner имеет диаметр 45 мм и шаг 29 мм.
Контроллер 24 стартового двигателя типа Markus.
Аккумуляторная батарея БПЛА 25 (фиг.5) типа КОКАМ.
Вес нетто ЭСУ не превышает 7 кг и установлен на БПЛА.
ЭСУ по изобретению обеспечивает радиус действия БПЛА весом 14 кг - 380 км.
Технический результат изобретения, увеличенный КПД ЭСУ на величину от 5 до 25% достигнут за счет применения в ней двух воздушных винтов с оптимальными шагами для их режимов работы и двух электродвигателей, что позволяет увеличить радиус действия БПЛА на 60 км (с 320 до 380 км).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| БПЛА из унифицированных деталей и узлов, изготовленных методом литья под давлением, и способ его изготовления | 2023 |
|
RU2814641C1 |
| ЭЛЕКТРОМОТОРНЫЙ ЭКРАНОПЛАН-АМФИБИЯ | 2019 |
|
RU2737406C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| КОНВЕРТОПЛАН КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2790460C1 |
| Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера | 2019 |
|
RU2714616C1 |
| ЭКРАНОПЛАН | 2005 |
|
RU2297933C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
Изобретение относится к электрической силовой установке беспилотного летательного аппарата. Установка содержит маршевый электродвигатель, на оси которого жестко закреплен маршевый толкающий воздушный винт, баллон с водородом с закрепленным на нем редуктором, батарея топливных элементов, систему управления маршевым электродвигателем, контроллер батареи топливных элементов, стартовый электродвигатель, стартовый воздушный винт, контроллер стартового электродвигателя, гондолу. В гондоле установлены маршевый электродвигатель, маршевый воздушный винт, баллон с водородом, редуктор, батарея топливных элементов, вентиляторы, датчики температуры, клапан, ключ, контроллер батареи топливных элементов. Технический результат заключается в повышении КПД электрической силовой установки. 7 ил.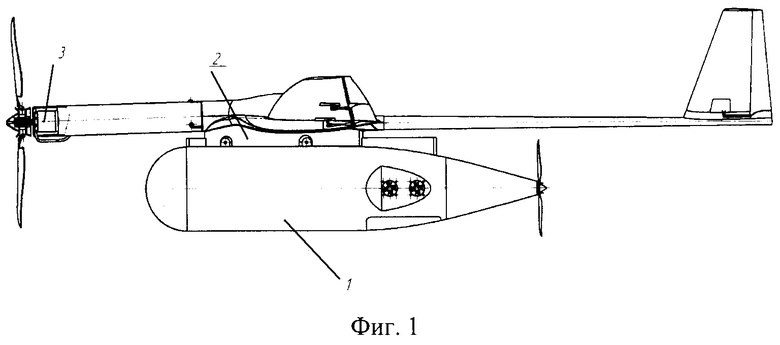
Электрическая силовая установка беспилотного летательного аппарата, содержащая маршевый электродвигатель (11), на оси которого жестко закреплен маршевый воздушный винт (12), баллон (5) с водородом с герметично закрепленным на нем редуктором (6), батарея (8) топливных элементов, вентиляторы (7) для охлаждения батареи (8) топливных элементов, датчики температуры (22), клапан (9) для продувки водородных каналов, который установлен между торцом батареи топливных элементов и системой (10) управления маршевым электродвигателем (11), которая включает контроллер (19) маршевого электродвигателя (11), ключ (20) запуска маршевого электродвигателя (11), контроллер (21) батареи (8) топливных элементов, причем контроллер (19) имеет вход электропитания и вход управляющего сигнала и один выход электропитания маршевого электродвигателя (11), контроллер (21) батареи (8) топливных элементов имеет четыре входа: вход ключа (20), вход электропитания и два входа сигналов датчиков температуры (22) и четыре выхода: выход управляющего сигнала на контроллер маршевого электродвигателя (11), выход сигнала управления клапаном (9), выходы электропитания вентиляторов (7), кроме того, вход питания контроллера батареи (21) соединен с выходом электропитания батареи (8) топливных элементов, выход контроллера (21) батареи электропитания клапана (9) соединен с входом этого клапана, сигнальный выход контроллера (21) батареи соединен с соответствующим входом контроллера (19) маршевого электродвигателя (11), выход электропитания контроллера (19) маршевого электродвигателя (11) соединен с входом электропитания этого электродвигателя, выходы сигналов датчиков температуры соединены с соответствующими входами контроллера (21) батареи, выходы контроллера (21) электропитания вентиляторов (7) соединены с входами этих вентиляторов, вход питания контроллера (19) маршевого двигателя (11) соединен с выходом питания батареи топливных элементов (8), отличающаяся тем, что введены стартовый электродвигатель (3), на оси которого жестко закреплен стартовый воздушный винт (23), контроллер (24) стартового электродвигателя (3), который имеет вход бортового электропитания, вход сигнала от системы управления БПЛА и выход электропитания стартового электродвигателя (3), причем выход электропитания контроллера (24) стартового электродвигателя (3) соединен с входом этого электродвигателя, гондола (1), в которой установлены: маршевый электродвигатель (11), маршевый воздушный винт (12), баллон (5) с водородом, редуктор (6), батарея (8) топливных элементов, вентиляторы (7), датчики температуры (22), клапан (9), ключ (20), контроллер (21) батареи (8) топливных элементов, причем маршевый воздушный винт (12) выполнен толкающим.
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ВИДЕОНАБЛЮДЕНИЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ И ПЕРЕДАЧИ ДАННЫХ | 2005 |
|
RU2311319C2 |
| Приспособление, например, к двухсистемным круглочулочным автоматам для вязания носочных изделий с имитированным ластиком | 1954 |
|
SU100491A1 |
| Жидкостемер для измерения, например, количества абсолютного спирта и его объема | 1949 |
|
SU89071A1 |
| US 2009072078 A1, 19.03.2009. | |||

