Изобретение относится к области электротехники и может быть использовано для энергообеспечения электрического оборудования в пределах помещения. Основной областью применения устройства является энергообеспечение медицинского оборудования в пределах медицинских помещений. К медицинскому оборудования, для энергообеспечения которого может быть использовано устройство, относятся хирургические аспираторы, электрокоагуляторы, наркозно-дыхательные аппараты, системы для аутогемотрансфузии, дефибрилляторы и др. Также изобретение может найти применение в тех областях техники, где необходимо обеспечивать беспроводное питание потребителей высокой мощности в пределах одного помещения, в частности для энергообеспечения промышленного оборудования и бытовой техники.
С развитием медицинских технологий и увеличением количества проводимых в год хирургических операций растет количество используемого в ходе операции электрооборудования. В свою очередь, это ведет к увеличению числа розеток и проводов, поскольку большинству приборов требуется питание от сети. Подобная ситуация порождает несколько эксплуатационных проблем, таких как ограничение мобильности медицинского персонала в ходе оказания медицинской помощи и сложности при дезинфекции проводных элементов питания. Возможным решением этой проблемы является внедрение систем беспроводного питания на основе индуктивной связи, которые представляют из себя пару катушек индуктивностей. Одна из них подключена к внешнему источнику питания и обеспечивает распространение магнитного поля в пространстве. Часть потока этого магнитного поля «захватывается» второй катушкой, индуцируя ток, который обеспечивает питание потребителя, соединенного с катушкой.
В настоящее время устройства на основе индуктивной связи применяются для энергообеспечения как маломощных потребителей, таких как бытовые электроприборы [1] и медицинские имплантируемые приборы [2], так и потребителей высокой мощностей, таких как электромобили [3]. Одной из основных проблем проектирования устройств для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты является проблема обеспечения заданного уровня мощности для питания устройств при всевозможных смещениях приемника относительно передатчика. Смещения в общем случае можно разделить на осевые (изменение расстояния между плоскостями катушек), боковые (изменение расстояния между осями вращения катушек) и угловые (изменение угла между осями вращения катушек). Изменение величин смещений между катушками может привести к изменению выходных характеристик передачи энергии, таких как передаваемая мощность и эффективность передачи, что может привести к сбоям в работе оборудования и даже к выходу этого оборудования из строя [4].
Известна система для энергообеспечения электрооборудования в пределах помещения, работа которой основана на принципе квазистатического резонанса [5]. Беспроводное энергообеспечение в такой конфигурации осуществляется за счет магнитного поля, пронизывающего весь объем комнаты. Передатчик представляет собой медный полюс с набором конденсаторов, установленный в центре помещения. Ток, подаваемый от внешнего источника, пронизывает полюс, пол, стены и потолок помещения, что порождает магнитное поле, циркулирующее вокруг полюса. Приемный контур в любой части помещения пронизывается магнитным полем. Существенным конструктивным недостатком данного устройства является необходимость в размещении медного полюса в центре комнаты. Также данные системы в своей текущей реализации требуют для функционирования размещения металлических экранных конструкций в стенах помещения, что также затруднительно для их развертывания в медицинских помещениях.
Известны также устройства, работа которых основана на принципе т.н. всенаправленной беспроводной передачи энергии [6-7]. Передатчик в таких устройствах представляет из себя две или три ортогонально расположенные и соединенные последовательно катушки, для которых осуществляется управление током посредством изменения фазы, что дает возможность передачи энергии на некоторые объемные пространства. Существенным недостатком данных устройств является изменение передаваемой мощности и эффективности при различных смещениях принимающей катушки, которое может сказаться на условиях функционирования подвижных приборов и аппаратов в операционной.
Известно устройство для беспроводного питания медицинского оборудования в операционной комнате [8], включающее в себя передающий модуль с передающей катушкой индуктивности, подвижную платформу с размещенным на ней питаемым медицинским оборудованием, принимающий модуль с принимающей катушкой индуктивности, модуль определения взаимного положения принимающей и передающей катушек индуктивности и модуль перемещения передающей катушки индуктивности со средствами вращения. Существенным недостатком этого устройства является отсутствие возможности обеспечения беспроводного питания медицинского оборудования на всей площади операционной комнаты, в связи с чем в устройстве предусмотрено экстренное отключение питания при «аномальном» смещении принимающего модуля (абз. 26 описание фиг. 1). Это связано с тем, что в изобретении реализована возможность вращения передающей катушки индуктивности, что не позволяет при любом относительном положении центров передающей и принимающей катушек индуктивности (при наличии линейных смещений) обеспечить максимальную величину коэффициента связи, которая достигается тогда и только тогда, когда плоскость витков принимающей катушки индуктивности перпендикулярна силовым линиям магнитного поля, генерируемого передающей катушкой индуктивности, в точке, совпадающей с центром витков принимающей катушки индуктивности. Последнего можно добиться только путем поворота принимающей катушки индуктивности по углу места и наклона принимающей катушки по азимуту. Поскольку в изобретении [8] коэффициент связи меньше максимально возможного (при наличии линейных смещений), то и эффективность передачи энергии ниже максимально достижимой, поскольку эффективность передачи энергии монотонно зависит от величины коэффициента связи. Также в изобретении [8] предусмотрена подача требуемой мощности к потребителям, что может быть реализовано только за счет изменения мощности питания, что снижает стабильность работы системы.
Также известно устройство для беспроводного энергообеспечения электротранспорта [9], в котором предложена возможность вертикального перемещения принимающего модуля. Существенным недостатком этого изобретения также является невозможность обеспечения максимально возможной величины коэффициента связи (и соответствующую ей максимально возможную эффективность передачи энергии) при наличии линейного смещения центра принимающего модуля (катушки индуктивности) относительно центра передающего модуля (катушки индуктивности), поскольку максимальная величина коэффициента связи достигается только тогда, когда плоскость витков принимающей катушки перпендикулярна направлению силовых линий магнитного поля, генерируемого передающей катушкой в точке, совпадающей с центром витков принимающей катушки. При наличии линейного (горизонтального) смещения центра принимающей катушки относительно передающей катушки обеспечить перпендикулярность силовых линий магнитного поля, генерируемого передающей катушкой в точке, совпадающей с центром витков принимающей катушки, можно только за счет поворота принимающей катушки индуктивности. При вертикальном перемещении принимающего модуля плоскость витков принимающей катушки будет параллельна плоскости витков передающей катушки, и силовые линии магнитного поля в точке, совпадающей с центром принимающей катушки, будут пересекать плоскость витков принимающей катушки под углом, отличным от прямого.
Наиболее близким к предлагаемому является устройство для беспроводного питания медицинского электрооборудования в операционной комнате [10]. В одном из вариантов исполнения (п. 21 формулы изобретения) это устройство включает в себя передающую катушку индуктивности (резонатор), принимающую катушку индуктивности (резонатор), медицинский прибор (потребитель тока) и подвижную платформу для перемещения принимающего модуля и медицинского прибора. Это устройство обеспечивает беспроводное энергообеспечение размещенного на подвижной платформе медицинского оборудования за счет индуктивной связи между передающей и принимающей катушками индуктивности. Существенным недостатком прототипа является неизбежное изменение коэффициента связи между приемной и передающей катушками индуктивности при перемещениях подвижной платформы, поскольку принимающая катушка закреплена неподвижно относительно подвижной платформы. Это не только приводит к изменению выходных характеристик (мощности тока на нагрузке, эффективности передачи энергии) при смещениях платформы относительно передающей катушки индуктивности, но и не позволяет обеспечить беспроводное энергообеспечение в пределах всего помещения больничной палаты - подвижная платформа должна находиться на расстоянии не более 1 м от передающей катушки индуктивности.
Задача изобретения - повышение стабильности работы и увеличение рабочей площади устройства для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты.
Это достигается тем, что предлагаемое устройство для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты, включающее в себя передающий модуль с передающей катушкой индуктивности, вмонтированной в пол палаты; подвижную платформу с размещенными на ней питаемым медицинским оборудованием и принимающим модулем с принимающей катушкой индуктивности дополнительно содержит систему перемещения принимающего модуля, состоящую из модуля определения взаимного положения принимающей и передающей катушек индуктивности; модуля перемещения принимающей катушки с механизмом вращения принимающей катушки индуктивности по азимуту и механизмом наклона принимающей катушки индуктивности по углу места; модуля управления.
Вращение принимающей катушки по азимуту и наклон по углу места позволяет изменять коэффициент связи приемной и передающей катушек индуктивности и, таким образом, поддерживать постоянный коэффициент связи приемной и передающей катушек индуктивности за счет компенсации изменения коэффициента связи, вызванного смещением подвижной тележки относительно передающей катушки индуктивности. Таким образом, решается задача поддержания стабильных выходных характеристик (выходной мощности, эффективности) при перемещениях принимающей катушки индуктивности относительно передающей катушки индуктивности без изменения входных характеристик (напряжения, мощности) передающего модуля и обеспечивается увеличение рабочей площади устройства вплоть до всей площади помещения.
Вращение принимающей катушки индуктивности по азимуту и углу места является необходимым для обеспечения возможности достижения максимально возможного значения коэффициента связи в произвольной точке плоскости, параллельной плоскости витков передающей катушки индуктивности и проходящей через центр принимающей катушки индуктивности. Это связано с тем, что максимальная величина коэффициента связи передающей и принимающей катушек индуктивности в такой точке обеспечивается тогда и только тогда, когда плоскость витков принимающей катушки перпендикулярна направлению линий магнитного поля, генерируемого передающей катушкой, в точке, совпадающей с центром витков принимающей катушки индуктивности. Поскольку эти линии представляют собой кольца, охватывающие витки передающей катушки индуктивности, для обеспечения взаимного положения передающей и принимающей катушек индуктивности, соответствующего максимальной величине коэффициента связи, принимающую катушку сначала необходимо повернуть по азимуту так, чтобы ось вращения по углу места была перпендикулярна радиальной линии, соединяющей центры принимающей и передающей катушек, а затем повернуть (наклонить) принимающую катушку по углу места так, чтобы плоскость витков принимающей катушки была перпендикулярна направлению линий магнитного поля, генерируемого передающей катушкой.
Также вращение принимающей катушки индуктивности по азимуту и наклон по углу места обеспечивает уменьшение коэффициента связи передающей и принимающей катушек вплоть до нуля. Это позволяет расширить границы диапазона значений коэффициента связи, в пределах которого поддерживается постоянный коэффициент связи, следующим образом: катушки проектируются таким образом, что в некоторых положениях центра принимающей катушки индуктивности относительно центра передающей катушки индуктивности при заданном расстоянии между плоскостями передающей и принимающей катушек индуктивности значение коэффициента связи превышает заданный в положении принимающей катушки «плоскость витков принимающей катушки индуктивности параллельна плоскости витков передающей катушки индуктивности». Это необходимо для того, чтобы в других положениях центра принимающей катушки индуктивности относительно центра передающей катушки индуктивности значение коэффициента связи соответствовало заданному при положении «плоскость витков принимающей катушки индуктивности параллельна плоскости витков передающей катушки индуктивности». В таком случае в положениях, при которых коэффициент связи превышает заданный, поворот катушки индуктивности обеспечивает уменьшение коэффициента связи за счет придания катушке индуктивности заданного наклона по азимуту и поворота по углу места в положение, при котором направление линий магнитного поля не является перпендикулярным к поверхности плоскости витков принимающей катушки.
Таким образом, при наличии возможности вращения принимающей катушки по азимуту и по углу места и модуля вращения принимающей катушки по азимуту устройство всегда может поддерживать некоторую величину заданного коэффициента связи на всей площади больничной палаты (операционной комнаты). Это обеспечивает повышение стабильности работы и рабочей площади устройства беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты.
Неотъемлемыми элементами устройства являются входящие в состав системы перемещения принимающего модуля являются модуль определения взаимного положения приемной и передающей катушек индуктивности и модуль управления. Модуль определения взаимного положения приемной и передающей катушек индуктивности необходим для того, чтобы после изменения положения приемной катушки индуктивности относительно передающей катушки индуктивности в результате перемещения подвижной тележки с устройством была получена информация, необходимая для перемещения принимающей катушки индуктивности в новой позиции подвижной тележки так, чтобы величина коэффициента связи передающей и принимающей катушек индуктивности, изменившаяся в результате перемещения подвижной тележки, оказалась равна заданной в результате вращения принимающей катушки индуктивности по азимуту и по углу места. Модуль управления необходим для вычисления требуемых значений угла места и азимута на основе информации, полученной от модуля определения взаимного положения принимающей и передающей катушек индуктивности.
Работа модуля управления может быть реализована в двух вариантах. В первом варианте модуль управления после смещения подвижной тележки относительно передающей катушки индуктивности определяет, на основе информации от модуля определения взаимного положения принимающей и передающей катушек индуктивности, изменилось ли положение оси поворота по углу места принимающей катушки индуктивности относительно радиальной линии, соединяющей центры передающей и принимающей катушек индуктивности. Если это положение изменилось, управляющий модуль выдает команду модулю перемещения принимающей катушки индуктивности, в соответствии с которой модуль перемещения принимающей катушки индуктивности поворачивает принимающую катушку индуктивности так, что ось поворота по углу места принимающей катушки оказывается перпендикулярна радиальной линии, соединяющей центры передающей и принимающей катушек индуктивности.
После этого модуль управления вычисляет новый коэффициент связи по следующей формуле:

где k - коэффициент связи передающей и принимающей катушек индуктивности, M - взаимная индуктивность, LT - собственная индуктивность передающей катушки индуктивности; LR - собственная индуктивность принимающей катушки индуктивности.
Собственные индуктивности передающей и принимающей катушек индуктивности вычисляются или измеряются заранее, взаимная индуктивность вычисляется по следующей формуле:
где μ0 - магнитная проницаемость вакуума, 4*10-7 Гн/м, Nwt и Nwr - число витков передающей и принимающей катушек, i и j - индексы витков передающей и принимающей катушек, соответственно,  - это взаимная индуктивность между i-м витком передающей катушки и j-м витком принимающей катушки, φ - угол места передающей катушки индуктивности,
- это взаимная индуктивность между i-м витком передающей катушки и j-м витком принимающей катушки, φ - угол места передающей катушки индуктивности, 
 - расстояние между элементарными участками i-го витка передающей катушки индуктивности и j-го витка принимающей катушки индуктивности, вычисляемое как:
- расстояние между элементарными участками i-го витка передающей катушки индуктивности и j-го витка принимающей катушки индуктивности, вычисляемое как:
где d - вертикально расстояние между центром принимающей катушки индуктивности и плоскостью витков передающей катушки индуктивности, ρ - радиальное расстояние между центром принимающей катушки индуктивности и центром передающей катушки индуктивности.
Если вычисленное по формуле (1) значение коэффициента связи передающей и принимающей катушек индуктивности отличается от заданного, управляющий модуль вычисляет зависимость коэффициента связи передающей и принимающей катушек индуктивности от угла места φ для заданных d и ρ с использованием формул (1), (2) и (3). Из полученного массива значений коэффициента связи передающей и принимающей катушек индуктивности выбирается ближайшее к заданному. Соответствующее этом значению значение угла места φ' выбирает как управляющая команда и передается на модуль изменения положения принимающей катушки индуктивности, который изменяет величину угла места принимающей катушки индуктивности так, чтобы угол места принимающей катушки индуктивности равнялся φ'.
Во втором варианте работы модуль управления после смещения подвижной тележки относительно передающей катушки индуктивности определяет, на основе информации от модуля определения взаимного положения принимающей и передающей катушек индуктивности, изменилось ли положение оси поворота по углу места принимающей катушки индуктивности относительно радиальной линии, соединяющей центры передающей и принимающей катушек индуктивности. Если это положение изменилось, управляющий модуль выдает команду модулю перемещения принимающей катушки индуктивности, в соответствии с которой модуль перемещения принимающей катушки индуктивности поворачивает принимающую катушку индуктивности так, что ось поворота по углу места принимающей катушки оказывается перпендикулярна радиальной линии, соединяющей центры передающей и принимающей катушек индуктивности. В отличие от первого варианта работы, в этом варианте работы модуля управления вычисления по формулам (1), (2) и (3) не выполняются. Вместо этого в память модуля управления вносится массив данных вида [d(i), ρ(j), φ(k)], в котором каждая комбинация d-ρ-φ для принимающей катушки индуктивности соответствует заданной величине коэффициента связи. Модуль управления на основании данных о величине измеренных модулем определения взаимного положения значений d и ρ выбирает соответствующее им φ' и передает на модуль перемещения принимающей катушки индуктивности команду, в соответствии с которой модуль перемещения принимающей катушки индуктивности меняет угол места принимающей катушки индуктивности с φ на φ'.
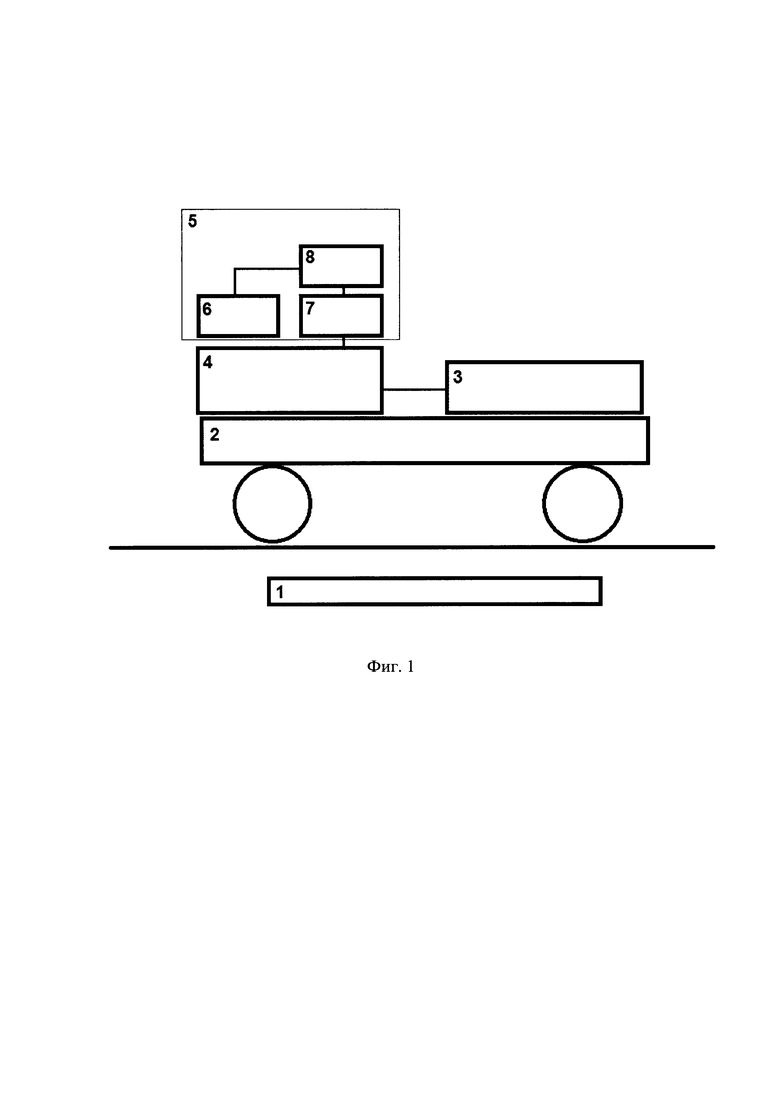
На фиг. 1 изображена блок-схема предлагаемого устройства для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты, где:
1 - передающий модуль с передающей катушкой индуктивности;
2 - подвижная платформа с размещенными на ней питаемым медицинским оборудованием;
3 - питаемое медицинское оборудование;
4 - принимающий модуль с принимающей катушкой индуктивности;
5 - система перемещения принимающего модуля;
6 - модуль определения взаимного положения приемной и передающей катушек индуктивности;
7 - модуль перемещения принимающей катушки индуктивности;
8 - модуль управления.
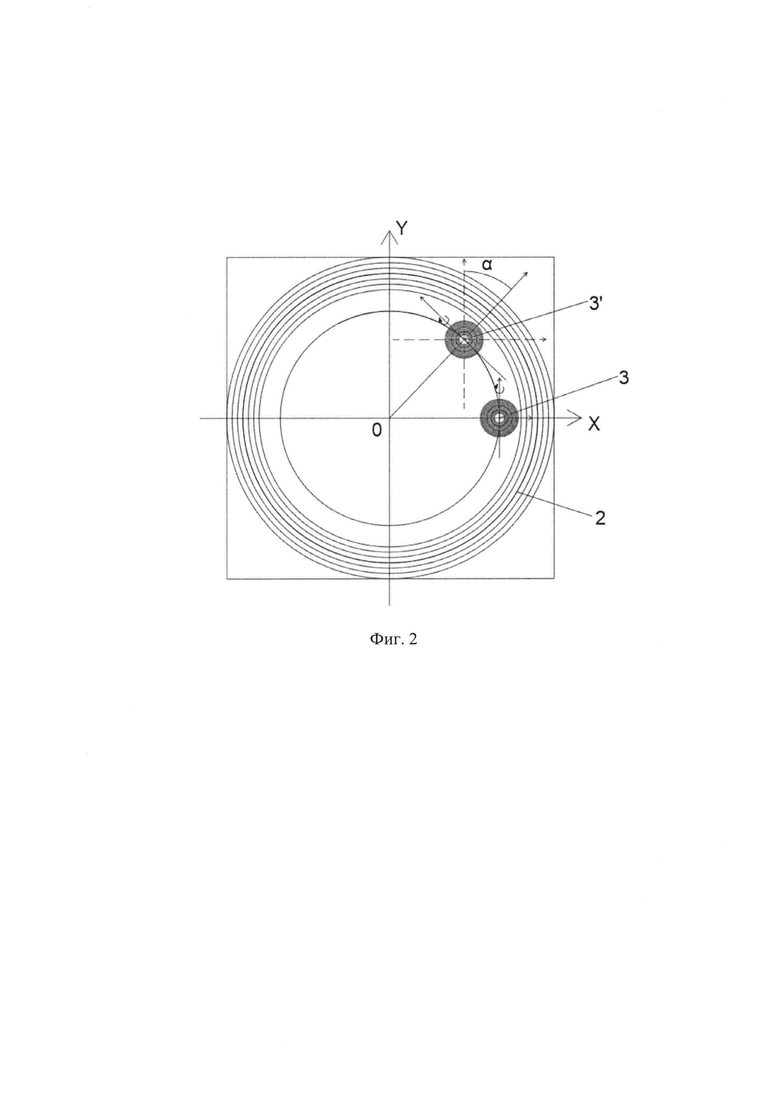
На фиг. 2 показана схема перемещений принимающей катушки по углу места и азимуту в зависимости от координаты относительно центра принимающей катушки.
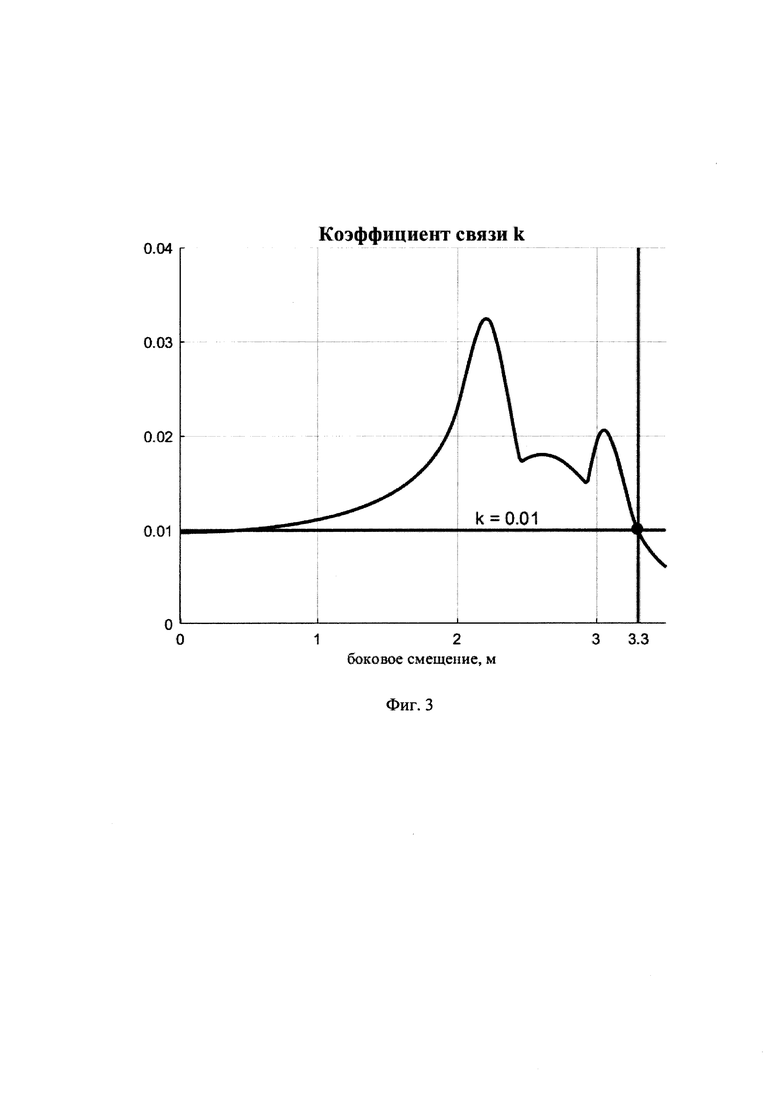
На фиг. 3 приведена зависимость максимального и минимального коэффициентов связи от боковых смещений для предлагаемого устройства с учетом возможности вращения принимающей катушки индуктивности.
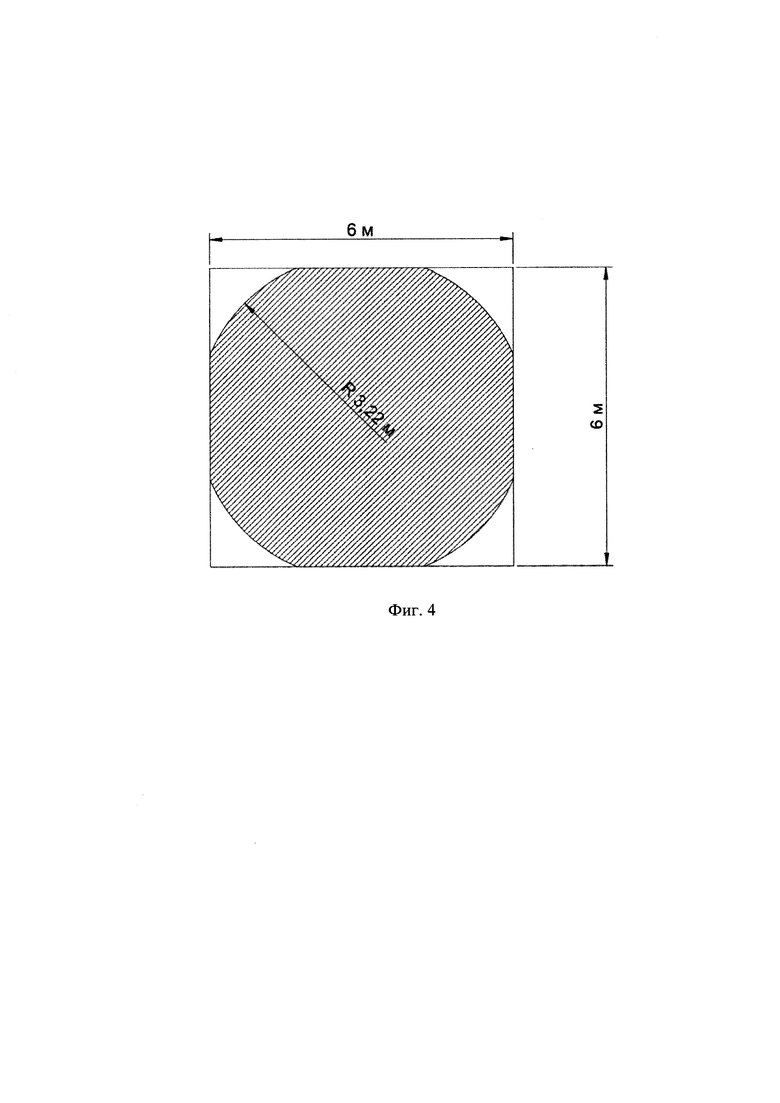
На фиг. 4 приведена область свободных перемещений для предлагаемого устройства: заштрихована часть помещения, в пределах которого обеспечивается поддержание заданного коэффициента связи передающей и принимающей катушек индуктивности.
Устройство, блок-схема которого приведена на фиг. 1, работает следующим образом. Передающий модуль с передающей катушкой индуктивности генерирует переменное магнитное поле, которое генерирует индукционный ток в принимающей катушке индуктивности принимающего модуля 4, индукционный ток используется для питания медицинского оборудования 3. При перемещениях подвижной платформы 2 модуль определения взаимного положения приемной и передающей катушек индуктивности определяет величину изменения положения подвижной платформы 2 относительно центра передающей катушки индуктивности в составе передающего модуля 1 и передает информацию о величине изменения положения в модуль управления 8. Модуль управления 8 выполняет расчет необходимого изменения положения принимающей катушки в составе принимающего модуля 4 относительно подвижной платформы 2 и выдает управляющую команду модулю перемещения принимающей катушки индуктивности 7, который изменяет положение принимающей катушки и тем самым обеспечивает поддержание заданного коэффициента связи принимающей и передающей катушек индуктивности.
Приведенная на фиг. 2 иллюстрация поясняет эффект от включения в состав модуля перемещения принимающей катушки индуктивности механизма вращения принимающей катушки индуктивности по азимуту и углу места. Для обеспечения корректного изменения угла места необходимо, чтобы ось вращения была перпендикулярна линии, соединяющей центры передающей и принимающей катушек в плоскости XOY. В приведенной на фиг. 2 позиции принимающего модуля 3 вращение по азимуту не требуется, в позиции 3' необходим поворот по азимуту на угол а для обеспечения перпендикулярного положения оси вращения (наклона) по углу места.
На фиг. 3 приведены зависимости максимального и минимального коэффициентов связи от боковых смещений для предлагаемого устройства с учетом возможности вращения катушки индуктивности по азимуту и наклона по углу места. Зависимости получены для катушек индуктивности, имеющих следующие основные характеристики:
принимающая катушка:
• внешний радиус - 0,22 м;
• внутренний радиус - 0,02 м;
• число витков - 10;
• сечение провода - 0,002 м;
• шаг намотки (от края до края провода) - 0,02 м;
передающая катушка:
• внешний радиус - 3 м;
• внутренний радиус - 2,25 м;
• сечение провода - 0,004 м;
• число витков - 12;
• шаг намотки (от края до края провода) - 0,064 м.
Расчет коэффициента связи выполнен для боковых смещений от 0 до 3,3 м (величина, предельно допустимая для размещения принимающей катушки радиусом в 0,22 м, что соответствует размещению катушки в одном из углов комнаты). Видно, что использование системы управления величиной коэффициента связи передающей и принимающей катушек индуктивности позволяет получить возможность поддерживать наперед заданное значение коэффициента связи в диапазоне 0…0,01 постоянными во всем диапазоне смещений, от 0 до 3,3 м.
Непосредственный технический эффект изобретения проиллюстрирован на фиг. 4. Показана зона свободных перемещений для предлагаемого устройства при заданном коэффициенте связи 0,01. Она ограничена кругом радиусом 3,22 м и это ограничение связано только с геометрией помещения (невозможностью перемещения приемной катушки в углах).
В одном из вариантов исполнения предлагаемого устройства модуль определения взаимного положения содержит датчик магнитного поля передающей катушки индуктивности. Поскольку определение взаимного положения нужно для вычисления величины коэффициента связи передающей и принимающей катушек индуктивности, т.е. доли магнитного потока поля, генерируемого передающей катушкой индуктивности и пронизывающего контур принимающей катушки индуктивности, использование датчика магнитного поля является наиболее точным способом оценки изменения взаимного положения принимающей и передающей катушек индуктивности (в сравнении с оптическими и другими средствами позиционирования).
В одном из вариантов исполнения принимающей модуль подает индукционный ток не непосредственно на питаемое медицинское оборудование, а на размещенный на подвижной платформе аккумулятор, питающий медицинское оборудование. Это позволяет повысить эффективность работы устройства, поскольку оно может быть выключено после зарядки аккумулятора до определенного уровня (80%) и, таким образом, нет необходимости держать устройство постоянно включенным, что может вызывать дополнительные потери энергии из-за особенностей потребления тока питаемым медицинским оборудованием.
В целом использование заявляемого устройства для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты позволит обеспечить передачу энергии с постоянным коэффициентом связи при перемещениях принимающей катушки практически по всей площади помещения. Это означает, что заявляемое устройство обеспечивает решение поставленной технической задачи, а именно - повышает стабильность передачи энергии устройством для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты.
Список источников:
1. Shu X., Xiao W., Zhang В. Wireless power supply for small household appliances using energy model//IEEE Access. 2018. - N 1. - P. 1.
2. Schormans M., Valente V., Demosthenous A. Practical Inductive Link Design for Biomedical Wireless Power Transfer: A Tutorial/IEEE Transactions on Biomedical Circuits and Systems. 2018. - P. 1-19.
3. Siqi Li, Mi С.C. Wireless Power Transfer for Electric Vehicle Applications // IEEE Journal of Emerging and Selected Topics in Power Electronics. 2015. - Vol. 3. - N 1. - P. 4-17.
4. Данилов A.A., Миндубаев Э.А., Селищев С.В. Методы компенсации смещений катушек в системах индуктивной чрескожной передачи энергии к имплантируемым медицинским приборам // Медицинская техника. 2017. №1. С. 41-44.
5. Sasatani Т., Sample А.P., Kawahara Y. Room-scale magnetoquasistatic wireless power transfer using a cavity-based multimode resonator // Nature Electronics -2021. - Vol. 4, №9. - P. 689-697.
6. Патент Японии 2012178479 А.
7. Патент Японии 2016059145 А.
8. Патент Корейской республики 20180013026 А.
9. Патент США 2024075823 А1.
10. Патент США 9662161 В2 - прототип.
11. Рудневский В.П., Данилов А.А. Влияние величины бокового смещения на характеристики системы беспроводного питания медицинского оборудования в операционной комнате / В.П. Рудневский, А.А. Данилов // Микроэлектроника и информатика - 2023: Материалы научно-технической конференции, Зеленоград, 20-21 апреля 2023 года. - Москва: Национальный исследовательский университет "Московский институт электронной техники", 2023. - С. 216-221.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ ЧРЕСКОЖНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2012 |
|
RU2510710C1 |
| УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОГО ЧРЕСКОЖНОГО ЭНЕРГООБЕСПЕЧЕНИЯ ИМПЛАНТИРУЕМЫХ МЕДИЦИНСКИХ ПРИБОРОВ | 2015 |
|
RU2618204C2 |
| Устройство для чрескожной передачи энергии с помощью индуктивной связи | 2020 |
|
RU2752139C1 |
| УСТРОЙСТВО ДЛЯ ИНДУКТИВНОЙ ПЕРЕДАЧИ ЭНЕРГИИ К ИМПЛАНТИРУЕМЫМ МЕДИЦИНСКИМ ПРИБОРАМ | 2021 |
|
RU2780941C1 |
| УСТРОЙСТВО ДЛЯ ИГР | 2011 |
|
RU2475290C1 |
| БЕСПРОВОДНАЯ ЗАРЯДНАЯ СИСТЕМА | 2022 |
|
RU2792218C1 |
| Беспроводная зарядная система | 2021 |
|
RU2781948C1 |
| Беспроводное зарядное устройство, система, способ управления, зарядное оборудование и носитель данных | 2019 |
|
RU2727524C1 |
| АНТЕННАЯ ОПРАВКА СО МНОЖЕСТВОМ АНТЕНН | 2016 |
|
RU2655542C2 |
| Устройство для определения положения устройства в пространстве относительно аналогичного устройства | 2018 |
|
RU2677083C1 |
Изобретение относится к области электротехники и может быть использовано для энергообеспечения электрического оборудования в пределах помещения. Основной областью применения устройства является энергообеспечение медицинского оборудования в пределах медицинских помещений, где необходимо обеспечивать беспроводное питание потребителей высокой мощности в пределах одного помещения. Техническим результатом является повышение стабильности работы и увеличение рабочей площади устройства для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты. Предложено устройство для беспроводного энергообеспечения медицинского оборудования в пределах больничной палаты, включающее в себя передающий модуль с передающей катушкой индуктивности, вмонтированной в пол палаты; подвижную платформу с размещенными на ней питаемым медицинским оборудованием и принимающим модулем с принимающей катушкой индуктивности, дополнительно содержит систему перемещения принимающего модуля, состоящую из модуля определения взаимного положения принимающей и передающей катушек индуктивности; модуля перемещения принимающей катушки с механизмом вращения принимающей катушки индуктивности по азимуту и механизмом наклона принимающей катушки индуктивности по углу места; модуля управления. 2 з.п. ф-лы, 4 ил.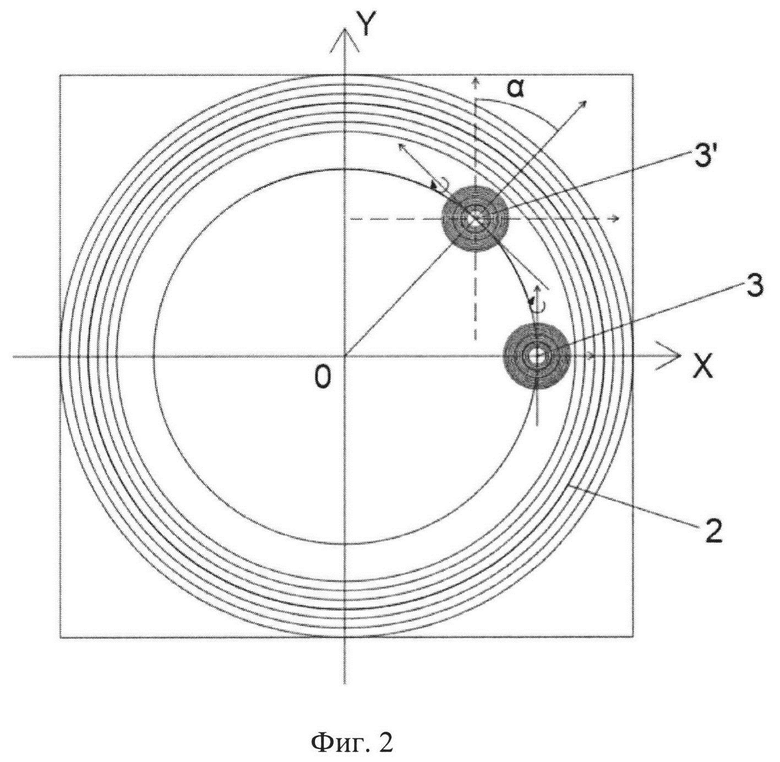
| KR 20180013026 A, 2018.02.07 | |||
| US 2024075823 A1, 2024.03.07 | |||
| СN 217692743 U, 2022.10.28 | |||
| CN 115483770 A, 2022.12.16 | |||
| CN 208423945 U, 2019.01.22 | |||
| CN 219227290 U, 2023.06.20 | |||
| US 2021167640 A1, 2021.06.03 | |||
| US 2022104979 A1, 2022.04.07 | |||
| CN 219322109 U, 2023.07.07 | |||
| СИСТЕМА БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2011 |
|
RU2719472C2 |

