Изобретение относится к области медицинской техники и может быть использовано для энергообеспечения имплантируемых медицинских приборов (ИМП), в том числе кардиостимуляторов, имплантируемых кардиовертеров/дефибрилляторов, нейростимуляторов, кохлеарных имплантатов, визуальных протезов (искусственной сетчатки), аппаратов вспомогательного кровообращения, аппаратов для полного замещения функции сердца (искусственных сердец) и других. Также изобретение может найти применение в тех областях техники, где возникает необходимость в беспроводной передаче энергии на небольшое расстояние.
Беспроводное чрескожное энергообеспечение в настоящее время является одним из основных направлений развития имплантируемых медицинских приборов (ИМП). Основными недостатками существующих методов энергообеспечения ИМП является необходимость замены выработавших ресурс батарей при использовании источников энергии, интегрированных в корпус ИМП; и возникновение тяжелых послеоперационных осложнений при использовании внешних источников энергии, соединенных с имплантируемой частью прибора чрескожными проводами. Обе эти проблемы могут быть решены за счет использования методов беспроводного чрескожного энергообеспечения.
Для беспроводного чрескожного энергообеспечения ИМП в настоящее время используется индуктивная связь. При этом формируемое внешней передающей катушкой индуктивности переменное магнитное поле вызывает индукционный ток через имплантируемую приемную катушку. Энергия индукционного тока используется для обеспечения работы ИМП, при этом обычно приемный контур включает так же выпрямитель и буферный аккумулятор. Обычно для беспроводного чрескожного энергообеспечения ИМП используют плоские спиральные катушки индуктивности с фактором заполнения, близким к 1.
Первая экспериментальная работа в области создания средств беспроводного энергообеспечения ИМП с помощью индуктивной связи была проведена в 1960 г. [1]. К настоящему времени этот способ энергообеспечения нашел широкое применение в кохлеарных имплантатах [2], активно ведутся работы по применению индуктивной связи для энергообеспечения систем вспомогательного кровообращения (СВК) [3-4], а так же других видов ИМП [5-7].
Основными задачами, которые необходимо решить при создании средств чрескожного беспроводного энергообеспечения ИМП, являются [8]:
- обеспечение термобезопасности ИМП, предотвращение перегрева имплантируемой части системы (стандартами установлена норма нагрева окружающих ИМП тканей не более чем на 2°С);
- обеспечение высокой эффективности передачи энергии для обеспечения приемлемых сроков автономной работы ИМП без подзарядки внешних аккумуляторов;
- обеспечение стабильности передачи энергии.
Успешное решение перечисленных задач во многом связано с решением проблемы смещения катушек, особенно в случае применения индуктивной связи для энергообеспечения СВК.
Известно устройство для беспроводного чрескожного энергообеспечения имплантируемых медицинских приборов, в котором положение приемной и передающей катушек фиксируется с помощью постоянных магнитов [9]. Существенными недостатками такого подхода являются уменьшение полезных размеров приемной катушки индуктивности (поскольку обычно в имплантатах используются спиральные катушки, а размещение на оси катушки постоянного магнита не позволяет максимально заполнить проводом ограниченное пространство имплантата), а также сжатие ткани между катушками, что может вызывать негативные последствия (отек, воспаления).
Известно устройство для беспроводного чрескожного энергообеспечения имплантируемых медицинских приборов, в котором положение передающей катушки относительно приемной катушки осуществляется с применением текстильной застежки типа VELCRO [10]. В этом способе предполагается, что одна часть застежки будет расположена в фиксированном положении на коже над приемной катушкой, а другая будет прикреплена к внешней (передающей) катушке. Существенным недостатком метода являются проблемы с разработкой эффективных и безопасных методов крепления застежки к коже, а также отсутствие возможности коррекции смещений имплантированной катушки относительно расположенной на коже застежки как в результате движений пациента (в том числе дыхательных), так и в результате изменения состояния тканей в области имплантации (нарастание и спадание послеоперационного отека).
Более перспективными представляются способы определения взаимного положения приемной и передающей катушек. Известен ряд устройств, в которых оценка смещений катушек выполняется на основе измеренных изменений характеристик тока в приемной части [11-13]. Существенным недостатком таких систем является то, что используемые в них методы позволяют оценить только величину, но не направление смещения. Полученная информация может быть использована для изменения параметров передачи энергии (частоты, напряжения на передающей катушке) или же для ручной корректировки положения передающей катушки до достижения оптимального положения методом перебора возможных направлений смещения. Оба способа приводят к снижению общей эффективности системы и, следовательно, к снижению времени автономной работы устройства, а ручная корректировка положения перебором возможных направлений является утомительной для пациента.
Наиболее близким к предлагаемому является устройство для чрескожного беспроводного энергообеспечения имплантируемых медицинских приборов, в котором для беспроводной черскожной передачи энергии используется индуктивная связь, а определение как направления, так и величины смещения приемной катушки относительно передающей катушки осуществляется на основе гигантского магнитнорезистивного эффекта, при этом датчик смещений интегрирован в передающую катушку, а на оси приемной катушки располагается самарий-кобальтовый магнит [14]. Это устройство так же обладает рядом недостатков. В такой системе возникает проблема помех, которые генерируемое передающей катушкой магнитное поле создает для работы датчика смещений. В связи с этим использование для передачи энергии частот ниже 10 МГц оказывается невозможным, в то же время в настоящее время общепринятым является диапазон в 100…200 КГц. Датчик магнитного поля также подвержен помехам со стороны других медицинских и бытовых приборов, генерирующих магнитные поля. Использование токсичных материалов (кобальта) является нежелательным в имплантируемых медицинских приборах, поскольку создает дополнительные риски для здоровья и жизни пациента. Результат измерений зависит от температуры магнита, между тем, детектирование положения имплантируемой катушки должно быть возможно в температурном диапазоне 35…42°С. Использование постоянного магнита, интегрированного с приемной катушкой, ведет к уменьшению полезных размеров приемной катушки индуктивности. Наконец, в системе появляется дополнительный структурный имплантируемый элемент объемом в 500…1000 мм3, в то время как общим требованием к имплантируемым устройствам является упрощение конструкции для повышения общей надежности (поскольку доступ к имплантируемым элементам затруднен) и уменьшение размеров и объемов имплантируемых устройств.
Задача изобретения - повышение эффективности беспроводного чрескожного энергообеспечения имплантируемых медицинских приборов.
Это достигается тем, что предлагаемое устройство для беспроводного чрескожного энергообеспечения имплантируемых медицинских приборов дополнительно содержит источник и детектор ультразвуковых волн, выполненный в виде массива емкостных микромеханических ультразвуковых датчиков, которые входят в состав модуля для определения взаимного положения приемной и передающей катушек индуктивности в составе системы беспроводного чрескожного энергообеспечения ИМП.
Использование массива емкостных микромеханических ультразвуковых датчиков, расположенных на оси передающей катушки, позволяет измерить пространственное распределение плотности в зоне интереса, т.е. в районе имплантации приемной катушки, и, таким образом, обеспечивает сбор исходной информации, позволяющей определить положение приемной (имплантированной) катушки индуктивности относительно передающей (внешней) катушки индуктивности. Определение взаимного положения осуществляется на основе обработки пространственного распределения плотности в зоне интереса устройством обработки и управления, входящим в состав модуля для определения взаимного приемной и передающей катушек, а именно - путем выделения зон с заранее известной плотностью (напр., соответствующей плотности корпуса имплантируемой катушки/приемного модуля) и определения их положения в системе координат, связанной с центром массива емкостных микромеханических ультразвуковых датчиков. Полученная информация о взаимном положении катушек передается пациенту и используется пациентом для самостоятельной корректировки взаимного положения приемной и передающей катушек для обеспечения максимальной эффективности передачи энергии (катушки соосны, плоскости катушек параллельны друг другу). Для этого модуль для определения взаимного положения приемной и передающей катушек индуктивности содержит средства непосредственного информирования пациента (звуковая сигнализация, экран) или средства связи с внешними устройствами (персональный компьютер, мобильное устройство), отображающими информацию о взаимном положении катушек.
В отличие от прототипа, имплантируемая часть системы не содержит самарий-кобальтовый магнит, что не приводит к уменьшению полезной площади приемной (имплантируемой) спиральной катушки индуктивности, которая может быть заполнена с фактором ~1. Таким образом, предложенная конструкция устройства для чрескожного беспроводного энергообеспечения имплантируемых медицинских приборов позволяет решить задачу определения взаимного положения приемной и передающей катушек индуктивности при большей общей энергоэффективности системы.
Следует отметить, что глубина имплантации приемной катушки составляет 10-25 мм. Для исследований на таких глубинах могут быть использованы ультразвуковые датчики, аналогичные датчикам, используемым в современных ультразвуковых эндоскопах [15]. В предлагаемом устройстве необходимо использовать массив емкостных микромеханических ультразвуковых датчиков (capacitive micromachined ultrasonic transducer, CMUT) [16, 17]. Размеры таких массивов составляют порядка 1 см. При расположении такого сенсора на оси передающей спиральной катушки индуктивности радиусом 3 см коэффициент заполнения передающей катушки может достигать 0,97. Информация от таких датчиков может быть использована для получения двумерных и трехмерных (объемных) распределений плотности объекта [17], на основе обработки которых можно получить информацию о взаимном положении передающей и приемной катушек индуктивности.
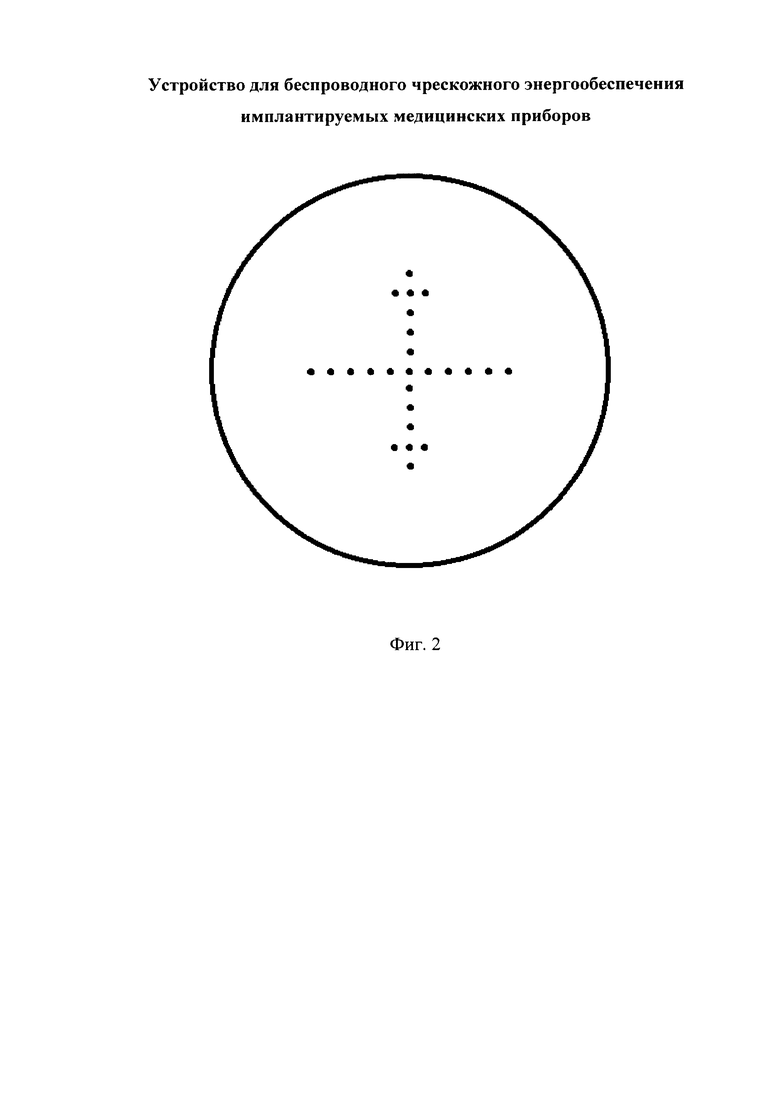
Для повышения точности определения положения имплантированной приемной катушки можно использовать специальные метки - объекты с размерами, соответствующими разрешающей способности современных ультразвуковых датчиков (физический предел для датчика с рабочей частотой 15 МГц составляет 0,1 мм; реально достигнутые результаты - обнаружение объектов с линейными размерами 0,15 мм на расстоянии 0,8 мм друг от друга [17]). Для определения как боковых, так и угловых смещений катушек такие метки целесообразно выполнять сложной формы - например, в форме восьмиконечного креста, выполнено пунктирными линиями, на поверхности корпуса приемной катушки индуктивности.
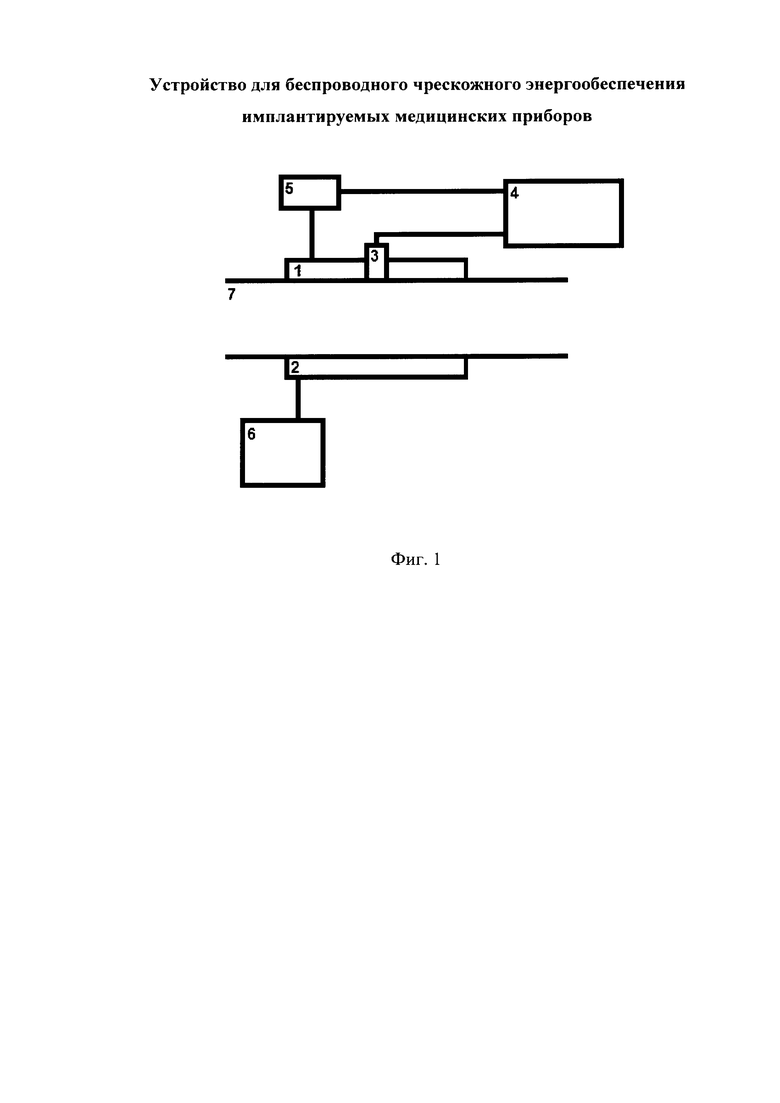
На фиг. 1 изображено предлагаемое устройство, где
1 - катушка индуктивности в передающем модуле;
2 - катушка индуктивности в принимающем модуле;
3 - массив емкостных микромеханических датчиков в составе модуля для определения взаимного положения приемной и передающей катушек индуктивности;
4 - устройство обработки данных и управления в составе модуля для определения взаимного положения приемной и передающей катушек индуктивности;
5 - внешний источник энергии;
6 - нагрузка (имплантируемый медицинский прибор);
7 - биологическая ткань (кожа, подкожный жир).
На фиг. 2 приведено расположение меток на поверхности приемной (имплантируемой) катушки индуктивности диаметром 6 см. Диаметр меток - 0,5 мм, расстояние между метками - 3 мм.
Возможны различные виды реализации процесса информирования пользователя о положении катушек. Наиболее простым может быть использование звуковой сигнализации при достижении некоторых заданных параметров взаимного расположения катушек (например, расстояние между осями катушек не превышает 0,1 от диаметра меньшей катушки). Также модуль для определения взаимного положения приемной и передающей катушек может быть снабжен экраном, на котором будут отображаться данные, полученные с помощью ультразвукового датчика. Наконец, модуль для определения взаимного положения приемной и передающей катушек может быть подсоединен к внешнему устройству (компьютер, мобильное устройство) с помощью проводной (например, USB) или беспроводной системы обмена данными, и полученные данные будут отображаться на экране внешнего устройство. При этом на экране, кроме результатов обработки ультразвуковых данных, должна отображаться метка положения центра передающей катушки.
Для фиксации достигнутого положения передающей катушки может использоваться эластичный бандаж или пояс, размещаемый на теле пациента.
Использование массива емкостных микромеханических ультразвуковых датчиков обеспечивает определение взаимного положения передающей и приемной катушек индуктивности и, соответственно, корректировку их положения для достижения максимальной эффективности беспроводного чрескожного энергообеспечения. Существенными преимуществами предложенного устройства по сравнению с прототипом является отсутствие элементов системы определения взаимного положения катушек в имплантируемой части системы, что позволяет уменьшить габариты имплантата и обеспечивает возможность достижения высоких значений фактора заполнения имплантируемой спиральной катушки индуктивности; более высокая точность определения взаимного положения приемной и передающей катушек; высокая помехозащищенность модуля определения взаимного положения приемной и передающей катушек.
Источники информации
1. Schuder J.C., Powering an Artificial Heart: Birth of the Inductively Coupled-Radio Frequency System in 1960 // Artificial Organs, 26(11), 2002. - P. 909-915.
2. Wilson В., Dorman M. Cochlear implants: Current designs and future possibilities // Journal of Rehabilitation Research & Development, Vol. 45, No. 5. 2008. - P. 695-730.
3. Dissanayake Т., Budget D., Hu A.P., Malpas S., Bennet L. Transcutaneous Energy Transfer System for Powering Implantable Biomedical Devices // Proc. of ICBME 2008, 2009, 23. - Pp. 235-239.
4. Rintoul Т.C., Dolgin A. Thoratec transcutaneous energy transformer system: a review and update // American Society for Artificial Internal Organs Journal. - 2004. - Vol. 50. - No. 4. - P. 397-400.
5. Silay K., Dehollain C., Declercq M. Numerical Thermal Analysis of a Wireless Cortical Implant with Two-Body Packaging // BioNanoScience, Vol. 1, 2011. - P. 78-88.
6. Seo J. et al. «A Retinal Implant System Based on Flexible Polymer Microelectrode Array for Electrical Stimulation» in «Ophfhalmology Research: Visual Prosthesis and Ophthalmic Devices: New Hope in Sight». Ed. J. Tombran-Tink, C. Barnstable, and J.F. Rizzo. Humana Press Inc., Totowa, NJ, 2007.
7. Givrad T. et al. Powering an Implantable Minipump with a Multi-layered Printed Circuit Coil for Drug Infusion Applications in Rodents // Annals of Biomedical Engineering, Vol. 38, No. 3, March 2010. - P. 707-713.
8. A.A. Данилов, Г.П. Иткин, С.В. Селищев. Развитие методов чрескожного беспроводного энергообеспечения имплантируемых систем вспомогательного кровообращения // Медицинская техника, 2010. №4 (262), с. 8-15.
9. Патент США 4`353`960.
10. Патент США 5`545`191.
11. Патент США 5`690`693.
12. Патент США 5`995`874.
13. Патент США 7`774`069.
14. Патент США 6`473`652 – прототип.
15. Endoscopic ultrasound probes // GASTROINTESTINAL ENDOSCOPY, Vol. 63, No. 6, 2006. - Pp. 751-754.
16. Oralkan O. et al. Capacitive Micromachined Ultrasonic Transducers: Next-Generation Arrays for Acoustic Imaging? // IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, Vol. 49, No. 11, November 2002. - Pp. 1596-1610.
17. Wygant I. et al. Integration of 2D CMUT Arrays with Front-End Electronics for Volumetric Ultrasound Imaging // IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, Vol. 55, N. 2, February 2008. - Pp. 327-342.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИНДУКТИВНОЙ ПЕРЕДАЧИ ЭНЕРГИИ К ИМПЛАНТИРУЕМЫМ МЕДИЦИНСКИМ ПРИБОРАМ | 2021 |
|
RU2780941C1 |
| Устройство для чрескожной передачи энергии с помощью индуктивной связи | 2020 |
|
RU2752139C1 |
| УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ ЧРЕСКОЖНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2012 |
|
RU2510710C1 |
| УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ ЧРЕСКОЖНОЙ ПЕРЕДАЧИ ОПТИЧЕСКОЙ ЭНЕРГИИ ДЛЯ ПИТАНИЯ ИМПЛАНТИРУЕМЫХ МЕДИЦИНСКИХ ПРИБОРОВ | 2017 |
|
RU2671418C1 |
| УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОГО ЭНЕРГООБЕСПЕЧЕНИЯ МЕДИЦИНСКОГО ОБОРУДОВАНИЯ В ПРЕДЕЛАХ БОЛЬНИЧНОЙ ПАЛАТЫ | 2024 |
|
RU2834389C1 |
| ИМПЛАНТИРУЕМЫЙ ГЛЮКОМЕТР НЕПРЕРЫВНОГО ДЕЙСТВИЯ И СПОСОБ СНАБЖЕНИЯ ЭЛЕКТРОЭНЕРГИЕЙ ЕГО МЕДИЦИНСКОГО БЛОКА | 2019 |
|
RU2796592C2 |
| МАЛОГАБАРИТНЫЙ РЕЗОНАТОР ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ И ЕГО ИНТЕГРАЦИИ С АНТЕННОЙ ДЛЯ ПЕРЕДАЧИ ДАННЫХ | 2012 |
|
RU2519389C1 |
| УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ ЧРЕСКОЖНОЙ ПЕРЕДАЧИ ЭНЕРГИИ СЕРДЕЧНОМУ НАСОСУ | 2019 |
|
RU2713108C1 |
| Устройство для длительного инвазивного дистанционного контроля состояния и критических изменений сердечно-сосудистой системы у пациентов с коморбидностью | 2015 |
|
RU2613086C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА КАНАТА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2007 |
|
RU2346879C2 |
Изобретение относится к медицинской технике, а именно к средствам энергообеспечения имплантируемых медицинских приборов. Устройство включает передающий модуль с катушкой индуктивности, генерирующей переменное магнитное поле, принимающий модуль с катушкой индуктивности и модуль для определения взаимного положения приемной и передающей катушек индуктивности, который содержит массив емкостных микромеханических ультразвуковых датчиков и находится вне организма человека. Использование изобретения позволяет повысить эффективность беспроводного чрескожного энергообеспечения имплантируемых медицинских приборов. 1 з.п. ф-лы, 2 ил.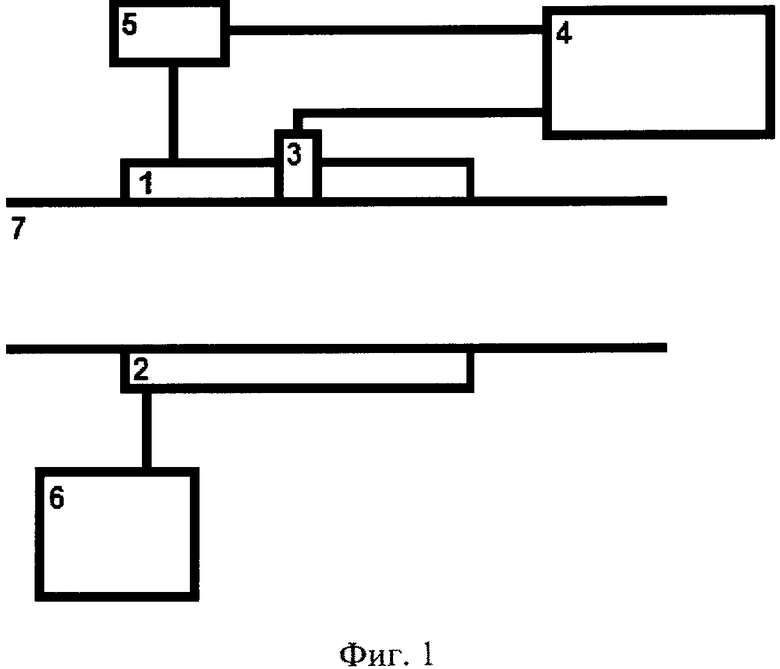
1. Устройство для беспроводного чрескожного энергообеспечения имплантируемых медицинских приборов, включающее в себя передающий модуль с катушкой индуктивности, генерирующей переменное магнитное поле, принимающий модуль с катушкой индуктивности, модуль для определения взаимного положения приемной и передающей катушек индуктивности, отличающееся тем, что модуль для определения взаимного положения приемной и передающей катушек индуктивности содержит массив емкостных микромеханических ультразвуковых датчиков и находится вне организма человека.
2. Устройство по п. 1, отличающееся тем, что на корпус катушки индуктивности в составе принимающего модуля дополнительно нанесены ультразвуковые контрастные метки.
| US 6473652 B1 29.10.2002 | |||
| US 2012109012 A1 3.05.2012 | |||
| US 2015214764 A1 30.07.2015 | |||
| US 8082041 B1 20.12.2011 | |||
| ORALKAN O | |||
| et al | |||
| "Capacitive Micromachined Ultrasonic Transdusers: Next-Generation Arrays for Acoustic Imaging?"/ IEEE Transaction on Ultrasonics, Ferroelectrics, and Frequence Control., Vol.55, N.2, February 2008 | |||
| СПОСОБ НАСТРОЙКИ КОХЛЕАРНОГО ИМПЛАНТА | 2007 |
|
RU2352084C1 |

