Изобретение относится к технике очистки поверхности плоских изделий с помощью гидромеханического и мегазвукового способа с применением моющего раствора и может быть использовано в полупроводниковом производстве при изготовлении ИС, БИС и СБИС перед проведением технологических операций фотолитографии.
Известно устройство для подготовки пластины US 7810513 B1, B08B 3/04 (Substrate preparation using megasonic coupling fluid meniscus and methods, apparatus, and systems for implementing the same), 30.09.2005,
Устройство включает мегазвуковую насадку и бесконтактную головку. Бесконтактная головка сконфигурирована для нанесения химического вещества на лицевую сторону полупроводниковой пластины и способна создавать подготовительный мениск на лицевой стороне пластины.
Недостатком данного метода является низкое качество очистки пластины. Данный недостаток обусловлен отсутствием возможности гидромеханической обработки на одной позиции.
Известно устройство и способ очистки полупроводниковых пластин WO 0059006 A1, H01L 21/00, H01L 21/304, H01L 21/306 (Semiconductor Wafer Cleaning Apparatus And Method), 30.03.1999.
В описываемом данное устройство патенте, предлагается два варианта осуществления изобретения.
В первом варианте в состав чистящего устройства входят:
- чистящая щетка;
- мегазвуковой преобразователь.
Мегазвуковой преобразователь расположен сбоку вдоль щетки и предназначен для выпуска жидкости с мегазвуковым перемешиванием для удаления загрязняющих частиц с поверхности полупроводниковой пластины. Чистящая щетка приспособлена для контакта с поверхностью пластины и фрикционного удаления загрязняющих частиц с помощью протирающего действия. Мегазвуковой преобразователь и чистящая щетка монтируются в чистящем узле. Чистящая щетка представляет собой пористую щетку, пропитанную специально подобранными чистящими жидкостями. Химические вещества, содержащиеся в чистящей жидкости, взаимодействуют с загрязнителями на поверхности пластины. Чистящие жидкости вступают в реакцию с загрязнителями, образуя продукт реакции. Продукт реакции удаляется с поверхности пластины протирающим усилием щетки, а также потоком чистящей жидкости.
Недостатком данного метода является низкое качество очистки пластин. Данный недостаток обусловлен тем, что устройство содержит только один компонент обработки - щетку, которая удаляет загрязнения с пластины с помощью трения, и в ходе обработки велика вероятность возврата загрязняющих частиц со щетки обратно на пластину. А также то, что чистящая жидкость наносится на пластину с мегазвуковыми колебаниями, затем пластина промывается деионизованной водой уже без использования мегазвука. Отсутствие потока деионизованной воды под действием мегазвуковых колебаний, чередующегося с подачей раствора, не позволяет обновлять моющий раствор, что может способствовать внесению дополнительных загрязнений.
Совокупность признаков, наиболее близкая к совокупности существенных признаков заявляемого технического решения, присуща известному устройству - установке односторонней гидромеханической и мегазвуковой очистки пластин УОП-150-1 производства АО «НИИПМ» https://vniipm.ru/ru/produkciya/product/view/15/47, принятому за прототип.
Устройство-прототип обеспечивает автоматическое проведение процесса индивидуальной односторонней очистки поверхности пластин на одной позиции путем обработки поверхности струей деионизованной воды с наложенными мегазвуковыми колебаниями и гидромеханическим способом с подачей моющего раствора и деионизованной воды на щётку, прижимаемую к поверхности пластины при помощи пневмопривода с механически регулируемым усилием прижима. Необходимость проведения той или иной операции, а также последовательность проведения операции мегазвуковой обработки и гидромеханической обработки щеткой устанавливается оператором по программе.
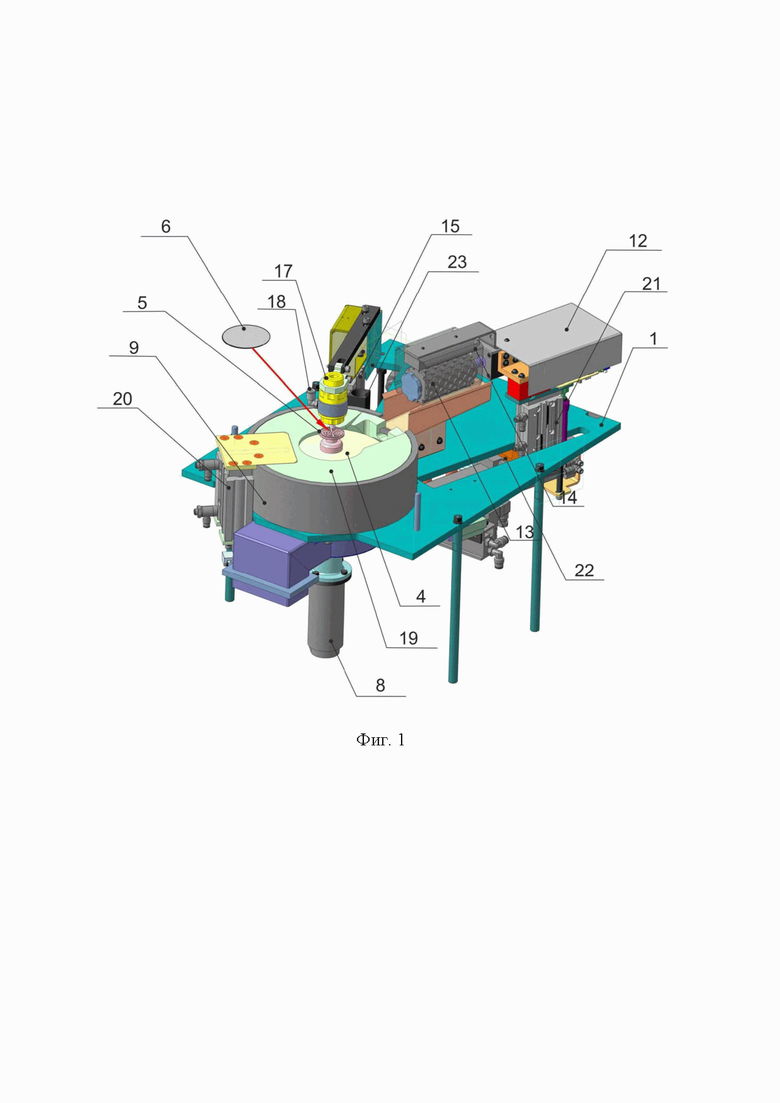
На фиг. 1 представлен общий вид устройства-прототипа.
На фиг. 1 приняты следующие обозначения:
1. Плита базовая
1. Блок обработки
2. Вакуумный столик
3. Пластина
1. Привод с центрифугой
2. Ванна
1. Привод вращения щетки
2. Щетка
3. Коллектор подачи деионизованной воды и раствора на щетку
4. Механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода
1. Мегазвуковая форсунка
2. Канал подачи воды в форсунку
3. Конус ванны (защитный)
4. Механизм вертикального перемещения конуса ванны на основе пневмопривода
5. Механизм вертикального перемещения привода щётки на основе пневмопривода
6. Механизм горизонтального перемещения щетки на основе пневмопривода
7. Механизм горизонтального перемещения мегазвуковой форсунки на основе пневмопривода.
Устройство-прототип содержит плиту базовую 1, в которую встроены основные блоки и узлы устройства: блок обработки 4, содержащий ванну 9 и привод с центрифугой 8, на валу которого установлен вакуумный столик 5, для размещения обрабатываемой пластины 6; конус ванны 19 размещен по внутреннему краю окружности ванны 9 и закреплен на механизме вертикального перемещения конуса ванны на основе пневмопривода 20; механизм вертикального перемещения привода щётки на основе пневмопривода 21, соединенный с механизмом горизонтального перемещения щетки на основе пневмопривода 22 и приводом вращения щетки 12, на котором закреплена щетка 13 с коллектором подачи деионизованной воды и раствора на щетку 14; механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода 15, соединенный с механизмом горизонтального перемещения мегазвуковой форсунки на основе пневмопривода 23, на котором закрепляется мегазвуковая форсунка 17 с каналом подачи воды в форсунку 18.
Обработка пластин устройством-прототипом осуществляется следующим образом:
Пластина 6 поступает на блок обработки 4 и устанавливается на вакуумный столик 5, расположенный в ванне 9. Механизм вертикального перемещения конуса ванны на основе пневмопривода 20 поднимает конус ванны 19, ограничивающий разбрызгивание воды, вакуумный столик 5 с пластиной 6 начинает вращаться при помощи привода с центрифугой 8. Механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода 15 поднимает мегазвуковую форсунку 17, затем механизм горизонтального перемещения мегазвуковой форсунки на основе пневмопривода 23 выдвигает мегазвуковую форсунку 17 вперед, далее механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода 15 опускает мегазвуковую форсунку 17. Генератор (на фиг. 1 не показан) передает колебания с частотой 1,65 МГц на воду и она подается по каналу подачи воды в форсунку 18 на пластину 6, при этом мегазвуговая форсунка 17 остается в центре пластины 6. После завершения подачи воды, мегазвуковая форсунка 17 перемещается в исходное положение Процесс мегазвуковой обработки завершен.
Механизм вертикального перемещения привода щётки на основе пневмопривода 21 поднимает щетку 13, Механизм горизонтального перемещения щетки на основе пневмопривода 22 выдвигает щетку 13 вперед, привод вращения щетки 12 приводит ее в движение, затем щетка 13 опускается с помощью механизма вертикального перемещения привода щётки на основе пневмопривода 21, далее происходит обработка пластины 6 при поочередной подаче раствора и деионизованной воды через коллектор подачи деионизованной воды и раствора на щетку 14 с одновременным ее вращением. После процесса гидромеханической обработки щетка 13 возвращается в исходное положение. Процесс гидромеханической обработки завершен. По завершении обработки проводится процесс сушки пластины на повышенной скорости привода с центрифугой 8, что способствует удалению капельной влаги с поверхности.
Недостатками данного устройства является:
- отсутствие цельной ванны для обработки пластины, вместо нее только поверхность с защитным конусом, что ведет к вероятности разбрызгивания раствора за пределы зоны обработки;
- отсутствие автоматического центрирования пластины на позицию обработки приводит к повышенному биению вращающейся пластины, а на высоких скоростях возможность срыва пластины со столика;
- отсутствие коллектора подачи моющего раствора во время мегазвуковой обработки снижает качество обработки пластины;
- механизм вертикального перемещения щетки выполнен на основе пневмопривода, что не позволяет регулировать усилие ее прижима к пластине;
- отсутствие механизмов поворота щетки и форсунки не позволяет подавать обрабатывающие жидкости на периферию пластины.
Задачей, на решение которой направлено заявляемое устройство, является улучшение качества обработки и сокращение времени сушки полупроводниковых пластин, а также повышение производительности оборудования на основе предлагаемого устройства.
Для решения поставленной задачи, в устройство гидромеханической и мегазвуковой обработки полупроводниковых пластин, содержащее плиту базовую, в которую встроены: блок обработки с ванной и приводом с центрифугой, на валу которого установлен вакуумный столик для размещения обрабатываемой пластины; механизм вертикального перемещения привода щётки с приводом вращения щетки, на котором закреплена щетка с коллектором подачи деионизованной воды и раствора на щетку; механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода, включающий мегазвуковую форсунку с каналом подачи воды в форсунку, согласно изобретению, дополнительно введены блок центрирования пластин с центрирующими кронштейнами, механизм вертикального перемещения центрифуги, механизм поворота щетки, механизм поворота мегазвуковой форсунки, при этом механизм вертикального перемещения щетки основан на шаговом двигателе, а форсунка имеет канал подачи моющего раствора.
Сущность заявляемого устройства поясняется чертежами.
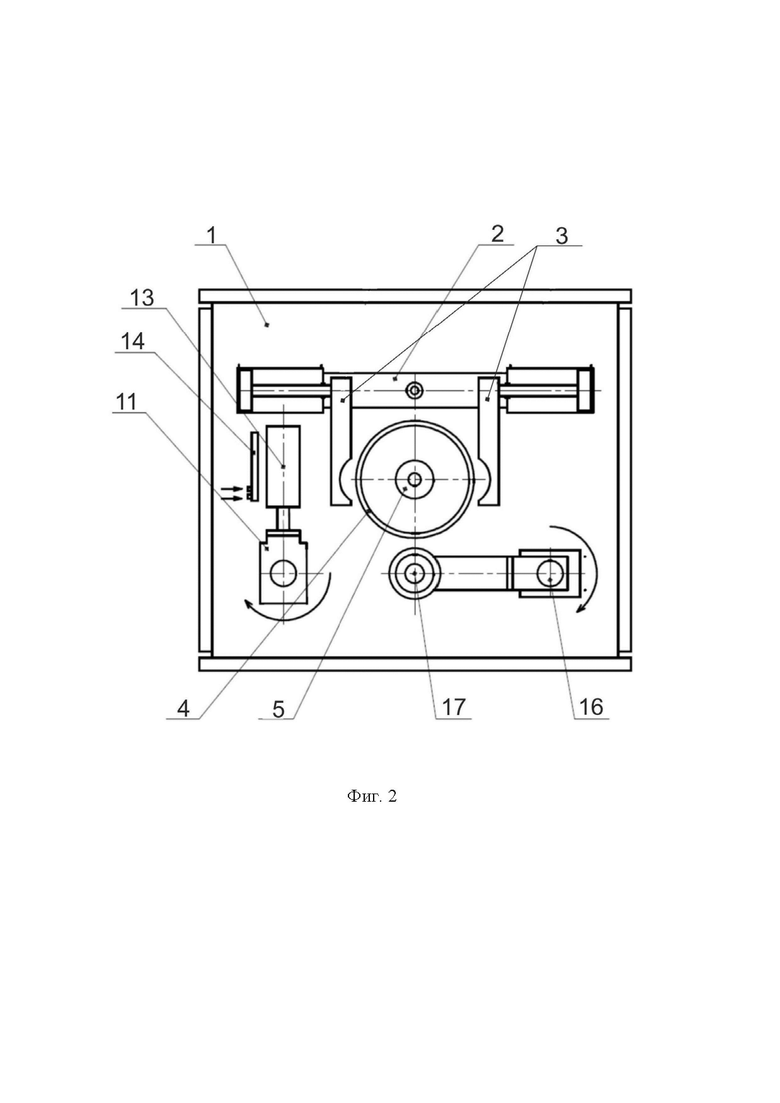
Фиг. 2 - вид устройства сверху.
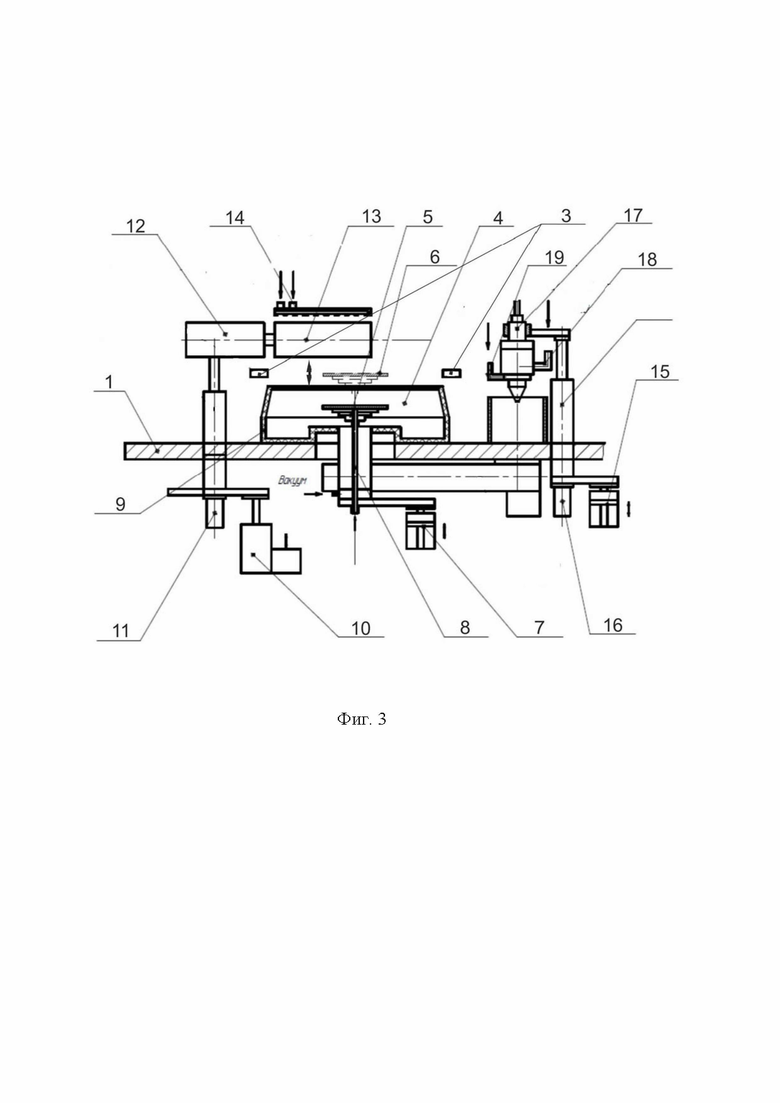
Фиг. 3 - вид устройства сбоку.
На фиг. 2 и 3 приняты следующие обозначения:
1 - плита базовая;
2 - блок центрирования пластин;
3 - центрирующие кронштейны;
4 - блок обработки;
5 - вакуумный столик;
6 - пластина;
7 - механизм вертикального перемещения центрифуги;
8 -привод с центрифугой;
9 - ванна;
10 - механизм вертикального перемещения щётки на базе шагового двигателя;
11 - механизм поворота щётки;
12 - привод вращения щётки;
13 - щетка;
14 - коллектор подачи деионизованной воды и раствора на щетку;
15 - механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода;
16 - механизм поворота мегазвуковой форсунки;
17 - мегазвуковая форсунка;
18 - канал подачи воды в форсунку;
19 - канал подачи раствора в форсунку.
Предлагаемое устройство содержит (фиг 2 - 3) плиту базовую 1, в которую встроены основные блоки и узлы устройства. Блок центрирования пластин 2 с центрирующими кронштейнами 3. Блок обработки 4, содержит ванну 9 и привод с центрифугой 8, на валу которого установлен вакуумный столик 5 для размещения обрабатываемой пластины 6. Привод с центрифугой 8 имеет возможность подниматься и опускаться при помощи механизма вертикального перемещения центрифуги 7. Механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода 15 соединен с механизмом поворота мегазвуковой форсунки 16, на котором закреплена мегазвуковая форсунка 17 с каналом подачи воды в форсунку 18 и каналом подачи моющего раствора в форсунку 19. Механизм вертикального перемещения щётки на базе шагового двигателя 10 соединен с механизмом поворота щётки 11 и приводом вращения щетки 12, на котором закреплена щетка 13 с коллектором подачи деионизованной воды и раствора на щетку 14.
Заявляемое устройство работает следующим образом (фиг. 2-3).
Механизм вертикального перемещения центрифуги 7 поднимает привод с центрифугой 8 и вакуумный столик 5. Пластина 6 поступает на вакуумный столик 5, блок центрирования пластин 2 с помощью центрирующих кронштейнов 3 выравнивает ось вакуумного столика 5 с осью пластины 6, и последняя фиксируется с помощью вакуума. После фиксации пластина 6 на вакуумном столике 5 с помощью механизма вертикального перемещения центрифуги 7 опускается в ванну 9. Привод с центрифугой 8 начинает вращение вакуумного столика 5 вместе с пластиной 6. Механизм вертикального перемещения щётки на базе шагового двигателя 10 поднимает механизм поворота щётки 11, который перемещает щётку 13 в зону обработки, привод вращения щетки 12 приводит ее в движение, и механизм вертикального перемещения щётки на базе шагового двигателя 10 опускает щётку на поверхности пластины 6. Далее происходит обработка пластины 6 щеткой 13 при поочередной подаче раствора и деионизованной воды через коллектор подачи деионизованной воды и раствора на щетку 14 с одновременным ее вращением. После процесса гидромеханической обработки щетка 13 возвращается в исходное положение. Процесс гидромеханической обработки завершен.
Механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода 15 поднимает механизм поворота мегазвуковой форсунки 16, а механизм поворота мегазвуковой форсунки 16 перемещает мегазвуковую форсунку 17 в зону обработки, и механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода 15 опускает её над поверхностью пластины 6. На пластину 6 поочерёдно через канал подачи воды в форсунку 18 и канал подачи моющего раствора в форсунку 19 подается обрабатывающая жидкость, при этом мегазвуковая форсунка 17 перемещается над поверхностью пластины от центра к периферии с помощью механизма поворота мегазвуковой форсунки 16. Включается генератор высокочастотных колебаний (на фиг. 2, 3 не показан), излучатель генерирует колебания с частотой 1,65 МГц и передаёт на воду. Энергия колебаний и обрабатывающая жидкость снижают силы адгезии и удаляют загрязнения с поверхности пластины. После завершения подачи воды и раствора, мегазвуковая форсунка 17 перемещается в исходное положение. Процесс мегазвуковой обработки завершен. По завершении обработки проводится процесс сушки пластины на повышенной скорости привода с центрифугой 8, что способствует удалению капельной влаги с поверхности.
Заявляемое устройство гидромеханической и мегазвуковой обработки полупроводниковых пластин обладает рядом достоинств по сравнению с устройством-прототипом.
Предлагаемое устройство содержит цельную ванну, вакуумный столик с установленной на нем пластиной, что обеспечивает защиту от протечки и разбрызгивания обрабатывающих жидкостей, в отличие от устройства-прототипа, где используется «неполноценная» ванна. Все механизмы заявляемого устройства находятся вне зоны обработки и не являются источниками дополнительных загрязнений. Входящий в состав устройства обработки блок центрирования пластины, предназначенный для совмещения оси столика и пластины, позволяет увеличить скорость вращения пластины, а с увеличением значений центробежной силы повышается эффективность очистки. Обрабатывающая жидкость подаётся по каналу на щётку в область контакта поверхности и загрязнения. В результате вращения щётки и пластины создаётся поток, который уменьшает силы адгезии загрязняющих частиц на поверхности, тем самым увеличивая эффективность удаления их, когда на щётку подаётся обрабатывающая жидкость. Механизм вертикального перемещения щетки основан на шаговом двигателе, что позволяет программно регулировать усилие прижима щётки к пластине. Мегазвуковая форсунка выполнена с возможностью перемещения в зону обработки с помощью вертикального и поворотного механизмов, что обеспечивает подачу обрабатывающих жидкостей от центра к периферии пластины. Поочередная подача раствора и деионизованной воды и одновременно генерируемые мегазвуковые колебания усиливают эффект очистки. Кроме того, поток деионизованной воды позволяет обновлять моющий раствор, предохраняя пластину от внесения дополнительных загрязнений. Порядок обработки может меняться. Сначала может проводиться гидромеханическая обработка, а затем мегазвуковая с применением деионизованной воды. При данном подходе исключается возврат загрязняющих частиц со щетки обратно на пластину, так как они будут удалены мегазвуковой обработкой с применением деионизованной воды.
Таким образом, предлагаемое устройство позволяет более качественно и эффективно удалять частицы загрязнений, увеличивает воздействие удаляющих сил на микрозагрязнения, сокращает время обработки, и как следствие - повышает производительность оборудования с использованием заявляемого устройства обработки.
Технический результат - улучшение качества обработки и сокращение времени сушки полупроводниковых пластин, приводящее к повышению производительности оборудования на основе предлагаемого устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ДВУХСТОРОННЕЙ ВЕРТИКАЛЬНОЙ ОЧИСТКИ ПОВЕРХНОСТИ КРУГЛЫХ ПЛАСТИН ПОЛУПРОВОДНИКОВЫХ И ОПТИЧЕСКИХ МАТЕРИАЛОВ | 2006 |
|
RU2327247C1 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ИНДИВИДУАЛЬНОЙ ОБРАБОТКИ ПОДЛОЖЕК КВАДРАТНОЙ ИЛИ ПРЯМОУГОЛЬНОЙ ФОРМЫ | 2007 |
|
RU2367526C2 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ОБРАБОТКИ ПЛАСТИН, НАПРИМЕР ФОТОШАБЛОНОВ | 2006 |
|
RU2328054C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 2005 |
|
RU2295172C2 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ОЧИСТКИ ПЛАСТИН | 2004 |
|
RU2275972C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕГАЗВУКОВОЙ ОЧИСТКИ ПОДЛОЖЕК | 2002 |
|
RU2243038C2 |
| УСТРОЙСТВО ДЛЯ МЕГАЗВУКОВОЙ ОЧИСТКИ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 1998 |
|
RU2173587C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 2003 |
|
RU2231168C1 |
| Способ очистки стекол окон снаружи высотного здания и стеклоочиститель для его осуществления | 2024 |
|
RU2833048C1 |
| СПОСОБ И УСТРОЙСТВО ОТМЫВКИ И СУШКИ ПОДЛОЖЕК | 2008 |
|
RU2386187C1 |
Изобретение относится к технике очистки поверхности плоских изделий с помощью гидромеханического и мегазвукового способа с применением моющего раствора и может быть использовано в полупроводниковом производстве при изготовлении ИС, БИС и СБИС перед проведением технологических операций фотолитографии. Сущность изобретения заключается в том, что в устройство гидромеханической и мегазвуковой обработки полупроводниковых пластин, содержащее плиту базовую, в которую встроены: блок обработки с ванной и приводом с центрифугой, на валу которого установлен вакуумный столик для размещения обрабатываемой пластины; механизм вертикального перемещения привода щётки с приводом вращения щетки, на котором закреплена щетка с коллектором подачи деионизованной воды и раствора на щетку; механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода, включающий мегазвуковую форсунку с каналом подачи воды в форсунку, дополнительно введены блок центрирования пластин с центрирующими кронштейнами, механизм вертикального перемещения центрифуги, механизм поворота щетки, механизм поворота мегазвуковой форсунки, при этом механизм вертикального перемещения щетки основан на шаговом двигателе, а форсунка имеет канал подачи моющего раствора. Технический результат - улучшение качества обработки и сокращение времени сушки полупроводниковых пластин, приводящее к повышению производительности оборудования на основе предлагаемого устройства. 3 ил.
Устройство гидромеханической и мегазвуковой обработки полупроводниковых пластин, содержащее плиту базовую, в которую встроены: блок обработки с ванной и приводом с центрифугой, на валу которого установлен вакуумный столик для размещения обрабатываемой пластины; механизм вертикального перемещения привода щётки с приводом вращения щетки, на котором закреплена щетка с коллектором подачи деионизованной воды и раствора на щетку; механизм вертикального перемещения мегазвуковой форсунки на основе пневмопривода, включающий мегазвуковую форсунку с каналом подачи воды в форсунку, отличающееся тем, что дополнительно введены блок центрирования пластин с центрирующими кронштейнами, механизм вертикального перемещения центрифуги, механизм поворота щетки, механизм поворота мегазвуковой форсунки, при этом механизм вертикального перемещения щетки основан на шаговом двигателе, а форсунка имеет канал подачи моющего раствора.
| СПОСОБ И УСТРОЙСТВО ОТМЫВКИ И СУШКИ ПОДЛОЖЕК | 2012 |
|
RU2510098C1 |
| Установка индивидуальной химической обработки подложек | 2022 |
|
RU2799377C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МЕГАЗВУКОВОЙ ОЧИСТКИ ПОДЛОЖЕК | 2002 |
|
RU2243038C2 |
| US 5520744 A1, 28.05.1996 | |||
| DE 10317329 B4, 22.03.2007 | |||
| KR 1020170100431 A, 04.09.2017. | |||

