ОБЛАСТЬ ТЕХНИКИ
[01] Настоящая заявка относится к технологии кодирования и декодирования видео и, в частности, к способам, оборудованию, устройствам и носителям данных для кодирования или декодирования.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[02] Весь процесс кодирования видео обычно включает предсказание, преобразование, квантование, энтропийное кодирование, фильтрацию и другие операции. Предсказание можно разделить на два типа: внутреннее предсказание и внешнее предсказание. Внутреннее предсказание использует окружающие кодированные единицы в качестве опорных для предсказания текущих некодированных единиц, эффективно устраняя избыточность в пространственной области. Внешнее предсказание использует соседние кодированные единицы в качестве опорных для предсказания текущих некодированных единиц, эффективно устраняя избыточность во временной области.
[03] Способ альтернативного временного предсказания вектора движения (ATMVP, Alternative Temporal Motion Vector Prediction), принятый в стандарте универсального кодирования видео (VVC, Versatile Video Coding), берет за основу информацию о движении временного подблока и предоставляет различную информацию о движении для каждого подблока в текущей единице кодирования (CU, coding unit).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[04] Ввиду этого настоящая заявка предоставляет способы, оборудование, устройства и носители данных для кодирования и декодирования.
[05] Способ декодирования предоставляется первым аспектом вариантов осуществления настоящей заявки и включает: получение значения флага режима расширенного временного предсказания вектора движения (ETMVP, Enhanced Temporal Motion Vector Prediction) и значения индекса режима ETMVP для текущей единицы кодирования (CU); когда значение флага режима ETMVP является первым значением: определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU; построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU; получение соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP; определение информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU.
[06] В одном варианте осуществления изобретения получение значения флага режима ETMVP для текущей CU включает: когда текущая CU удовлетворяет первому условию анализа, анализ значения флага режима ETMVP из битового потока; в противном случае определение значения флага режима ETMVP как второго значения; при этом, если значение флага режима ETMVP является первым значением, это указывает на то, что текущая CU разрешает режим ETMVP; если значение флага режима ETMVP является вторым значением, это указывает на то, что текущая CU запрещает режим ETMVP.
[07] В одном варианте осуществления изобретения текущая CU удовлетворяет первому условию анализа, включающему одно или более из следующего: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера; согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает использовать способы ETMVP; текущая CU удовлетворяет условию для использования углового взвешенного предсказания (AWP) или условию для использования конечного выражения вектора движения (UMVE).
[08] В одном варианте осуществления изобретения заранее заданное ограничение размера включает следующее: текущая CU имеет ширину и высоту, которые больше или равны N0.
[09] В одном варианте осуществления изобретения N0 равно 8.
[10] В одном варианте осуществления изобретения текущая CU удовлетворяет условию для использования AWP, включающему следующее: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает использовать способы AWP; текущая CU имеет ширину и высоту, которые больше или равны N1, но меньше или равны N2; типом текущего кадра изображения является В-изображение; текущая CU удовлетворяет условию для использования UMVE, включающему следующее: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает использовать способы UMVE.
[11] В одном варианте осуществления изобретения флаг режима ETMVP кодируют контекстно-ориентированным адаптивным двоичным арифметическим кодированием (САВАС) с помощью контекстной модели.
[12] В одном варианте осуществления изобретения получение значения индекса режима ETMVP для текущей CU включает: когда текущая CU удовлетворяет второму условию анализа, анализ значения индекса режима ETMVP из битового потока.
[13] В одном варианте осуществления изобретения текущая CU удовлетворяет второму условию анализа, включающему одно или более из следующего: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU разрешает режим ETMVP.
[14] В одном варианте осуществления изобретения осуществляют обратную бинаризацию значения индекса режима ETMVP на основе усеченного унарного значения с максимальным значением 4, при этом усеченное унарное значение использует строку бинов, содержащую до 4 бинов, и каждый из бинов использует отдельную контекстную модель, так что всего имеется четыре контекстных модели.
[15] В одном варианте осуществления изобретения определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU включает: определение временного опорного изображения, в котором находится согласующаяся CU, в соответствии с типом текущего кадра изображения; определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU; при этом, если типом текущего кадра изображения является Р-изображение, временное опорное изображение находится в списке 0 опорных изображений, и его значение индекса опорного кадра равно 0; если типом текущего кадра изображения является В-изображение, временное опорное изображение находится в списке 1 опорных изображений, и его значение индекса опорного кадра равно 0; при этом построение списка расширенных временных кандидатов в соответствии с информацией о координатах начальной согласующейся CU включает: построение списка расширенных временных кандидатов в соответствии с информацией о координатах начальной согласующейся CU во временном опорном изображении.
[16] В одном варианте осуществления изобретения определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU включает: определение информации о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении.
[17] В одном варианте осуществления изобретения определение информации о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении включает: определение абсциссы начальной согласующейся CU в соответствии с абсциссой левого верхнего угла текущей LCU на изображении, размером LCU, шириной текущей CU, шириной текущего изображения и абсциссой левого верхнего угла текущей CU на изображении; определение ординаты начальной согласующейся CU в соответствии с ординатой левого верхнего угла текущей LCU на изображении, размером LCU, высотой текущей CU, высотой текущего изображения и ординатой левого верхнего угла текущей CU на изображении.
[18] В одном варианте осуществления изобретения построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU включает: определение по меньшей мере одного номера режима ETMVP в соответствии с информацией о координатах начальной согласующейся CU; построение списка расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP.
[19] В одном варианте осуществления изобретения информация о координатах согласующейся CU представляет собой координату левого верхнего угла согласующейся CU во временном опорном изображении; построение списка расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP включает: добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; если Му+8 меньше или равно меньшим значениям y_ctb_pos+lcu_size-cu_height и verticalsize-cu height, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; если Мх+8 меньше или равно меньшим значениям х_ctb_pos+lcu_size-cu_width и horizontal_size-cu_width, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; если Му-8 больше или равно у_ctb_pos, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление режима ETMVP с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; если Мх-8 больше или равно х_ctb_pos, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции В3, то добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; где (Мх, My) - информация о координатах начальной согласующейся CU, (x_ctb_pos, y_ctb_pos) - координата левого верхнего угла текущей LCU на изображении, lcusize - размер LCU, cuwidth и cuheight - ширина и высота текущей CU, a horizontals ize и verticalsize - ширина и высота текущего изображения соответственно; А1 - это блок 4*4 в левом верхнем углу начальной согласующейся CU, В1 - блок 4*4 непосредственно слева от А1, и С1 - блок 4*4 непосредственно над A1; А2 - это блок 4*4 в правом верхнем углу начальной согласующейся CU, В2 - блок 4*4 непосредственно справа от А2, и С2 - блок 4*4 непосредственно над А2; A3 - это блок 4*4 в левом нижнем углу начальной согласующейся CU, В3-блок 4*4 непосредственно слева от A3, и С3-блок 4*4 непосредственно под A3; А4 - это блок 4*4 в правом нижнем углу начальной согласующейся CU, В4 - блок 4*4 непосредственно справа от А4, и С4 - блок 4*4 непосредственно под А4.
[20] В одном варианте осуществления изобретения построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU также включает: когда длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле до тех пор, пока длина списка расширенных временных кандидатов не станет равной 5: добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1.
[21] В одном варианте осуществления изобретения получение соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP, включает: если номер режима ETMVP равен 0, то Рх равно Мх, Ру равно My; если номер режима ETMVP равен 1, то Рх равно Мх, Ру равно Му+n; если номер режима ETMVP равен 2, то Рх равно Мх+n, Ру равно My; если номер режима ETMVP равен 3, то Рх равно Мх, Ру равно Му-n; если номер режима ETMVP равен 4, то Рх равно Мх-n, Ру равно My; где (Мх, Му) - координата левого верхнего угла начальной согласующейся CU, а (Рх, Ру) - координата левого верхнего угла целевой согласующейся CU.
[22] В одном варианте осуществления изобретения п равно 8.
[23] В одном варианте осуществления изобретения определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU включает: для любого подблока в целевой согласующейся CU: когда типом текущего кадра изображения является Р-изображение: если информация о движении в прямом направлении для подблока доступна, то информацию о движении в прямом направлении для подблока масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[24] В одном варианте осуществления изобретения определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU включает: для любого подблока в целевой согласующейся CU: когда типом текущего кадра изображения является В-изображение: если информация о движении в прямом направлении и информация о движении в обратном направлении для подблока доступны, информацию о движении в прямом направлении и информацию о движении в обратном направлении для подблока масштабируют соответственно с указанием на первый кадр List0 и первый кадр List1, и масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU; если информация о движении в прямом направлении для подблока доступна, но информация о движении в обратном направлении недоступна, информацию о движении в прямом направлении для подблока масштабируют с указанием на первый кадр List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; если информация о движении в обратном направлении для подблока доступна, но информация о движения в прямом направлении недоступна, информацию о движении в обратном направлении для подблока масштабируют с указанием на первый кадр List1, и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[25] В одном варианте осуществления изобретения определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU включает: для любого подблока в целевой согласующейся CU: когда типом текущего кадра изображения является Р-изображение: если информация о движении в прямом направлении для подблока недоступна, когда доступна информация о движении в прямом направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении первого окружающего блока масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда информация о движении в прямом направлении первого окружающего блока недоступна, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU; когда типом текущего кадра изображения является В-изображение: если ни информация о движении в прямом направлении, ни информация о движении в обратном направлении для подблока недоступны, когда доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении и информацию о движении в обратном направлении первого окружающего блока масштабируют к первому кадру List0 и первому кадру List1 соответственно, и масштабированную информацию о движении в прямом направлении и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU соответственно; когда информация о движении в прямом направлении первого окружающего блока доступна, но его информация о движении в обратном направлении недоступна, его информацию о движении в прямом направлении масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда информация о движении в обратном направлении первого окружающего блока доступна, но его информация о движении в прямом направлении недоступна, его информацию о движении в обратном направлении масштабируют к первому кадру List1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU; при этом первый окружающий блок включает любой декодированный соседний блок текущей CU.
[26] В одном варианте осуществления изобретения в соответствии с информацией о движении каждого подблока в целевой согласующейся CU определение информации о движении подблока в соответствующей позиции в текущей CU также включает: выполнение компенсации движения (МС) для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU.
[27] В одном варианте осуществления изобретения выполнение МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU включает следующее: для любого подблока текущей CU не используют уточнение вектора движения на стороне декодера (DMVR) для его информации о движении; если подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), МС выполняют для подблока в соответствии с информацией о движении подблока, и способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока; в противном случае выполняют МС для подблока в соответствии с информацией о движении подблока и получают матрицу отсчетов предсказания подблока; при этом отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
[28] В одном варианте осуществления изобретения подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), по меньшей мере включающим: согласно высокоуровневому синтаксису уровня последовательности, способы BIO включены; точность MV текущей CU равна 0; подблок использует двунаправленное предсказание; для этого подблока опорный кадр, значение индекса которого равно refIdxL0 в списке 0 опорных изображений, и опорный кадр, значение индекса которого равно refIdxLl в списке 1 опорных изображений, соответственно отображают с обеих сторон текущего кадра.
[29] В одном варианте осуществления изобретения способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока, при этом способ включает: определение матрицы отсчетов предсказания подблока в соответствии со значением МС в прямом направлении, значением МС в обратном направлении и значением смещения оптического потока подблока.
[30] Способ кодирования предоставляется вторым аспектом вариантов осуществления настоящей заявки и включает: определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU; построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU; определение информации о координатах целевой согласующейся CU, соответствующей каждому номеру режима ETMVP в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов; определение информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU; выполнение компенсации движения (МС, motion compensation) для каждого подблока в текущей CU в соответствии с информацией о движении подблока в текущей CU; вычисление стоимости скорости-искажения для каждого режима ETMVP и сравнение стоимости скорости-искажения с соответствующими значениями стоимости скорости-искажения других режимов предсказания для выбора режима предсказания, соответствующего наименьшей стоимости скорости-искажения; и запись флага режима ETMVP и значения индекса режима ETMVP для выбранных режимов предсказания в битовый поток для передачи на устройство декодирования.
[31] В одном варианте осуществления изобретения, в соответствии с информацией о движении каждого подблока в текущей CU, выполнение МС для соответствующего подблока в текущей CU включает следующее: для любого подблока текущей CU не используют уточнение вектора движения на стороне декодера (DMVR) для его информации о движении; если подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), МС выполняют для подблока в соответствии с информацией о движении подблока, и способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока; в противном случае выполняют МС для подблока в соответствии с информацией о движении подблока и получают матрицу отсчетов предсказания подблока, при этом отсчеты предсказания CU состоят из отсчетов предсказания каждого подблока.
[32] В одном варианте осуществления изобретения подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), по меньшей мере включающим: согласно высокоуровневому синтаксису уровня последовательности, способы BIO включены; точность MV текущей CU равна 0; подблок использует двунаправленное предсказание; для этого подблока опорный кадр, значение индекса которого равно refIdxL0 в списке 0 опорных изображений, и опорный кадр, значение индекса которого равно refIdxLl в списке 1 опорных изображений, соответственно отображают с обеих сторон текущего кадра.
[33] В одном варианте осуществления изобретения способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока, при этом способ включает: если значение флага режима ETMVP является первым значением, это указывает на то, что текущая CU разрешает режим ETMVP; если значение флага режима ETMVP является вторым значением, это указывает на то, что текущая CU запрещает режим ETMVP.
[34] В одном варианте осуществления изобретения запись соответствующего флага режима ETMVP в битовый поток включает: когда текущая CU удовлетворяет первому условию анализа, запись соответствующего флага режима ETMVP в битовый поток; в противном случае определение значения флага режима ETMVP как второго значения; если значение флага режима ETMVP является первым значением, это указывает на то, что текущая CU разрешает режим ETMVP; если значение флага режима ETMVP является вторым значением, это указывает на то, что текущая CU запрещает режим ETMVP.
[35] В одном варианте осуществления изобретения текущая CU удовлетворяет первому условию анализа, включающему: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU имеет ширину и высоту, которые больше или равны 8; согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает использовать способы ETMVP; текущая CU удовлетворяет условию для использования углового взвешенного предсказания (AWP) или условию для использования конечного выражения вектора движения (UMVE).
[36] В одном варианте осуществления изобретения текущая CU удовлетворяет условию для использования AWP, включающему: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает использовать способы AWP; текущая CU имеет ширину и высоту, которые больше или равны N1, но меньше или равны N2; типом текущего кадра изображения является В-изображение; текущая CU удовлетворяет условию для использования UMVE, включающему: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает использовать способы UMVE.
[37] В одном варианте осуществления изобретения флаг режима ETMVP кодируют контекстно-ориентированным адаптивным двоичным арифметическим кодированием (САВАС) с помощью контекстной модели.
[38] В одном варианте осуществления изобретения запись значения индекса режима ETMVP в битовый поток включает: когда текущая CU удовлетворяет второму условию анализа, запись значения индекса режима ETMVP в битовый поток.
[39] В одном варианте осуществления изобретения текущая CU удовлетворяет второму условию анализа, включающему одно или более из следующего: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU разрешает режим ETMVP.
[40] В одном варианте осуществления изобретения осуществляют обратную бинаризацию значения индекса режима ETMVP на основе усеченного унарного значения с максимальным значением 4, при этом усеченное унарное значение использует строку бинов, содержащую до 4 бинов, и каждый из бинов использует отдельную контекстную модель, так что всего имеется четыре контекстных модели.
[41] В одном варианте осуществления изобретения определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU включает: определение временного опорного изображения, в котором находится согласующаяся CU, в соответствии с типом текущего кадра изображения; определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU; при этом, если типом текущего кадра изображения является Р-изображение, временное опорное изображение находится в списке 0 опорных изображений, и его значение индекса опорного кадра равно 0; если типом текущего кадра изображения является В-изображение, временное опорное изображение находится в списке 1 опорных изображений, и его значение индекса опорного кадра равно 0; причем построение списка расширенных временных кандидатов в соответствии с информацией о координатах начальной согласующейся CU включает: построение списка расширенных временных кандидатов в соответствии с информацией о координатах начальной согласующейся CU во временном опорном изображении.
[42] В одном варианте осуществления изобретения определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU включает: определение информации о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении.
[43] В одном варианте осуществления изобретения определение информации о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении включает: определение абсциссы начальной согласующейся CU в соответствии с абсциссой левого верхнего угла текущей LCU на изображении, размером LCU, шириной текущей CU, шириной текущего изображения и абсциссой левого верхнего угла текущей CU на изображении; определение ординаты начальной согласующейся CU в соответствии с ординатой левого верхнего угла текущей LCU на изображении, размером LCU, высотой текущей CU, высотой текущего изображения и ординатой левого верхнего угла текущей CU на изображении.
[44] В одном варианте осуществления изобретения определение информации о координатах целевой согласующейся CU, соответствующей каждому номеру режима ETMVP в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов включает: если номер режима ETMVP равен 0, то Рх равно Мх, Ру равно My; если номер режима ETMVP равен 1, то Рх равно Мх, Ру равно Му+8; если номер режима ETMVP равен 2, то Рх равно Мх+8, Ру равно My; если номер режима ETMVP равен 3, то Рх равно Мх, Ру равно Му-8; если номер режима ETMVP равен 4, то Рх равно Мх-8, Ру равно My; где (Мх,Му) - координата левого верхнего угла начальной согласующейся CU, а (Рх,Ру) - координата левого верхнего угла целевой согласующейся CU.
[45] В одном варианте осуществления изобретения построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU включает: определение по меньшей мере одного номера режима ETMVP в соответствии с информацией о координатах начальной согласующейся CU; построение списка расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP.
[46] В одном варианте осуществления изобретения информация о координатах согласующейся CU представляет собой координату левого верхнего угла согласующейся CU во временном опорном изображении; построение списка расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP включает: добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; если Му+8 меньше или равно меньшим значениям y_ctb_pos+lcu_size-cu_height и verticalsize-cu height, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов, увеличение длины списка расширенных временных кандидатов на 1; если Мх+8 меньше или равно меньшим значениям x_ctb_pos+lcu_size-cu_width и horizontal_size-cu_width, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; если Му-8 больше или равно у ctb_pos, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление режима ETMVP с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; если Мх-8 больше или равно x_ctb_pos, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, то добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1; где (Мх, My) - информация о координатах начальной согласующейся CU, (х ctb_pos, у ctb_p»os) - координата левого верхнего угла текущей LCU на изображении, leu size - размер LCU, cuwidth и cuheight - ширина и высота текущей CU соответственно, а horizontals ize и verticalsize - ширина и высота текущего изображения соответственно; А1 - это блок 4*4 в левом верхнем углу начальной согласующейся CU, В1 - блок 4*4 непосредственно слева от А1, и С1 - блок 4*4 непосредственно над Al; А2 - это блок 4*4 в правом верхнем углу начальной согласующейся CU, В2 - блок 4*4 непосредственно справа от А2, и С2 - блок 4*4 непосредственно над А2; A3 - это блок 4*4 в левом нижнем углу начальной согласующейся CU, В3-блок 4*4 непосредственно слева от A3, и С3-блок 4*4 непосредственно под A3; А4 - это блок 4*4 в правом нижнем углу начальной согласующейся CU, В4 - блок 4*4 непосредственно справа от А4, и С4 - блок 4*4 непосредственно под А4.
[47] В одном варианте осуществления изобретения построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU также включает: когда длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле до тех пор, пока длина списка расширенных временных кандидатов не станет равной 5: добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1.
[48] В одном варианте осуществления изобретения определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU включает: для любого подблока в целевой согласующейся CU: когда типом текущего кадра изображения является Р-изображение: если информация о движении в прямом направлении для подблока доступна, то информацию о движении в прямом направлении для подблока масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[49] В одном варианте осуществления изобретения определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU включает: для любого подблока в целевой согласующейся CU: когда типом текущего кадра изображения является В-изображение: если информация о движении в прямом направлении и информация о движении в обратном направлении для подблока доступны, информацию о движении в прямом направлении и информацию о движении в обратном направлении для подблока масштабируют соответственно к первому кадру List0 и первому кадру List1, а масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU; если информация о движении в прямом направлении для подблока доступна, но информация о движении в обратном направлении недоступна, информацию о движении в прямом направлении для подблока масштабируют с указанием на первый кадр List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; если информация о движении в обратном направлении подблока доступна, но информация о движении в прямом направлении недоступна, информацию о движении в обратном направлении для подблока масштабируют к первому кадру List1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[50] В одном варианте осуществления изобретения определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU включает: для любого подблока в целевой согласующейся CU: когда типом текущего кадра изображения является Р-изображение: если информация о движении в прямом направлении для подблока недоступна, когда доступна информация о движении в прямом направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении первого окружающего блока масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда информация о движении в прямом направлении первого окружающего блока недоступна, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU; когда типом текущего кадра изображения является В-изображение: если ни информация о движении в прямом направлении, ни информация о движении в обратном направлении для подблока недоступны, когда доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении и информацию о движении в обратном направлении первого окружающего блока масштабируют к первому кадру List0 и первому кадру List1 соответственно, а масштабированную информацию о движении в прямом направлении и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU соответственно; когда информация о движении в прямом направлении первого окружающего блока доступна, но его информация о движении в обратном направлении недоступна, его информацию о движении в прямом направлении масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда информация о движении в обратном направлении первого окружающего блока доступна, но его информация о движении в прямом направлении недоступна, его информацию о движении в обратном направлении масштабируют к первому кадру List1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU; при этом первый окружающий блок включает любой декодированный соседний блок текущей CU.
[51] Устройство декодирования предоставляется третьим аспектом вариантов осуществления настоящей заявки и содержит: блок сбора данных, сконфигурированный для получения значения флага режима ETMVP и значения индекса режима ETMVP для текущей CU; первый блок определения, сконфигурированный для определения информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU, когда значение флага режима ETMVP является первым значением; блок построения, выполненный с возможностью построения списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU; второй блок определения, сконфигурированный для получения соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определения информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP; третий блок определения, сконфигурированный для определения информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определения информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU.
[52] Устройство кодирования предоставляется четвертым аспектом вариантов осуществления настоящей заявки и содержит: первый блок определения, сконфигурированный для определения информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU; блок построения, выполненный с возможностью построения списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU; второй блок определения, сконфигурированный для определения информации о координатах целевой согласующейся CU, соответствующей каждому расширенному временному режиму-кандидату в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов; третий блок определения, сконфигурированный для определения информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определения информации о движении подблока в соответствующей позиции в текущей CU согласно информации о движении каждого подблока в целевой согласующейся CU; блок МС, сконфигурированный для выполнения МС для каждого подблока в текущей CU в соответствии с информацией о движении подблока в текущей CU; блок кодирования, сконфигурированный для вычисления стоимости скорости-искажения, соответствующей каждому режиму ETMVP, сравнения стоимости скорости-искажения с соответствующими значениями стоимости скорости-искажения других режимов предсказания, выбора режима предсказания, соответствующего наименьшей стоимости скорости-искажения, и затем записи флага режима ETMVP и значения индекса режима ETMVP для выбранного режима ETMVP в битовый поток для передачи на устройство декодирования.
[53] Устройство декодирования предоставляется пятым аспектом вариантов осуществления настоящей заявки и содержит процессор и машиночитаемый носитель данных, при этом машиночитаемый носитель данных хранит машиночитаемые инструкции, которые могут выполняться процессором, и процессор сконфигурирован для выполнения машиночитаемых инструкций для осуществления способа декодирования согласно первому аспекту.
[54] Устройство кодирования предоставляется шестым аспектом вариантов осуществления настоящей заявки и содержит процессор и машиночитаемый носитель данных, при этом машиночитаемый носитель данных хранит машиночитаемые инструкции, которые могут выполняться процессором, и процессор сконфигурирован для выполнения машиночитаемых инструкций для осуществления способа декодирования согласно второму аспекту.
[55] Машиночитаемый носитель данных предоставляется седьмым аспектом вариантов осуществления настоящей заявки, при этом машиночитаемый носитель данных хранит машиночитаемые инструкции, и машиночитаемые инструкции выполняются процессором для осуществления способа, описанного в первом аспекте или втором аспекте.
[56] Способ декодирования, предусмотренный вариантами осуществления настоящей заявки, включает: получение значения флага режима ETMVP и значения индекса режима ETMVP для текущей CU; когда значение флага режима ETMVP является первым значением, определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU и построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU; получение соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP; определение информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU и определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU, что улучшает производительность кодирования и декодирования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[57] Фиг. 1 представляет собой схему способа кодирования и декодирования согласно варианту осуществления настоящей заявки;
[58] Фиг. 2 представляет собой схему операции обрезки согласно варианту осуществления настоящей заявки;
[59] Фиг. 3 представляет собой блок-схему способа декодирования согласно варианту осуществления настоящей заявки;
[60] Фиг. 4 представляет собой схему опорного блока при смещении согласующейся единицы кодирования (CU) согласно варианту осуществления настоящей заявки;
[61] Фиг. 5 представляет собой схему первого окружающего блока текущей CU согласно варианту осуществления настоящей заявки;
[62] Фиг. 6 представляет собой блок-схему другого способа декодирования согласно варианту осуществления настоящей заявки;
[63] Фиг. 7 представляет собой структурную схему устройства декодирования согласно варианту осуществления настоящей заявки;
[64] Фиг. 8 представляет собой структурную схему другого устройства декодирования согласно варианту осуществления настоящей заявки;
[65] Фиг. 9 представляет собой схему аппаратной структуры устройства декодирования согласно варианту осуществления настоящей заявки;
[66] Фиг. 10 представляет собой структурную схему устройства кодирования согласно варианту осуществления настоящей заявки;
[67] Фиг. 11 представляет собой схему аппаратной структуры устройства кодирования согласно варианту осуществления настоящей заявки.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[68] Здесь будут подробно описаны варианты осуществления изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. Когда в последующем описании сделаны ссылки на прилагаемые чертежи, если не указано иное, одни и те же цифровые обозначения на разных чертежах обозначают одни и те же или подобные элементы. Реализации, описанные в следующих вариантах осуществления изобретения, не представляют всех реализаций, совместимых с настоящей заявкой. Скорее, они являются просто примерами устройств и способов, согласующихся с некоторыми аспектами настоящей заявки, подробно описанными в прилагаемой формуле изобретения.
[69] Термины, используемые в настоящей заявке, предназначены только для описания конкретных вариантов осуществления изобретения и не предназначены для ограничения настоящей заявки. Формы единственного числа, используемые в настоящей заявке и прилагаемой формуле изобретения, также предназначены для включения форм множественного числа, если в контексте явно не указано иное.
[70] Чтобы позволить специалистам в данной области техники лучше понять технические решения, обеспечиваемые вариантами осуществления настоящей заявки, далее сначала будут кратко описаны некоторые технические термины и существующие основные процессы кодирования и декодирования видео, задействованные в вариантах осуществления настоящей заявки.
[71] Чтобы специалисты в данной области техники могли лучше понять технические решения, обеспечиваемые вариантами осуществления настоящей заявки, далее сначала будут кратко описаны некоторые технические термины, используемые в вариантах осуществления настоящей заявки.
[72] Технические термины:
[73] 1. Сигнал предсказания: относится к значению пикселя, определенному из кодированных и декодированных пикселей. Остаток получается в виде разности между исходным сигналом и сигналом предсказания, затем остаток преобразуется и квантуется, а коэффициент кодируется.
[74] Например, сигнал внешнего предсказания относится к значениям пикселей текущего блока изображения, определенным из опорного кадра (реконструированного кадра пикселей). Поскольку позиции пикселей дискретны, для получения окончательного сигнала предсказания необходима интерполяция. Чем ближе сигнал предсказания к исходному сигналу, тем меньше энергия остатка, полученная путем вычитания указанных двух сигналов, и тем выше производительность кодирования и сжатия.
[75] 2. Вектор движения (MV, Motion Vector): в межкадровом кодировании (внешнем кодировании) MV относится к относительному смещению между текущей единицей кодирования (CU) и наиболее согласующейся CU в его опорном изображении. Каждый блок разделения (также может называться «подблоком») имеет соответствующий MV, который необходимо передать декодеру. Если MV для каждого подблока кодируется и передается независимо, особенно если подблок разбит на небольшие по размеру, он потребляет значительное количество битов. Чтобы уменьшить количество битов, используемых для кодирования MV, при кодировании видео используется пространственная корреляция между соседними блоками изображения для предсказания MV текущего некодированного блока в соответствии с MV соседних кодированных блоков, а затем кодируется разность предсказания. Таким образом, можно эффективно уменьшить количество битов для представления MV. При этом во время процесса кодирования MV текущего блока изображения MV соседнего кодированного блока используется для предсказания MV текущего блока изображения, затем кодируется разность между предсказанным значением MV (также называемым «предсказанием вектора движения» или далее сокращенно «MVP») и истинным оценочным значением MV, а именно разность векторов движения (MVD, Motion Vector Difference), таким образом эффективно уменьшается количество битов, используемых для кодирования MV.
[76] 3. Информация о движении: поскольку MV представляет собой относительное смещение между текущей CU и наиболее согласующейся CU в опорном изображении, для точного получения информации, указывающей на блок изображения, в дополнение к информации MV также необходимо использовать индексную информацию опорного изображения, чтобы указать, какое опорное изображение используется. В технологии кодирования видео для текущего изображения обычно на основе определенных принципов устанавливается список опорных изображений, и индексная информация опорного изображения указывает, какое опорное изображение в списке опорных изображений используется для текущего блока изображения. Кроме того, многие способы кодирования поддерживают несколько списков опорных изображений, поэтому требуется другое значение индекса, чтобы указать, какой список опорных изображений используется, которое можно назвать опорным направлением. При кодировании видео информация о кодировании, связанная с движением, такая как MV, индекс опорного кадра и опорное направление, совместно называется информацией о движении. Например, информация о движении: пятерка, используемая для внешнего предсказания, состоящая из опорного режима предсказания, L0 MV, L1 MV, опорного индекса L0 и опорного индекса L1.
[77] 4. Оптимизация скорости-искажения (RDO, Rate-Distortion Optimized). Метрики для оценки эффективности кодирования включают: битовую скорость передачи и отношение пикового сигнала к шуму (PSNR, Peak Signal to Noise Ratio). Чем меньше битовая скорость передачи, тем больше степень сжатия; чем больше PSNR, тем лучше качество реконструированного изображения. Формула оценки, используемая при выборе режима, по существу представляет собой всестороннюю оценку двух режимов. Стоимость, соответствующая режиму:
J(режим)=D+λ*R.
[78] При этом D представляет искажение, обычно измеряемое метрикой суммы квадратов ошибок (SSE, Sum of Squares for Error), a SSE представляет собой сумму квадратов ошибок разности между реконструированным блоком и исходным блоком изображения; X - множитель Лагранжа; R - фактическое количество битов, необходимых для кодирования блоков изображения в указанном режиме, включая сумму битов, необходимых для кодирования информации о режиме, информации о движении, остатков и т.д.
[79] Если RDO используется при выборе режима для принятия сравнительных решений о режимах кодирования, обычно может быть гарантирована наилучшая производительность кодирования.
[80] 5. Двунаправленный оптический поток (BIO, Bi-directional Optical flow): технология BIO добавляет компенсацию оптического потока к текущей CU на основе информации о градиенте значений пикселей в прямом и обратном опорных кадрах. Например, технические детали BIO могут быть следующими:
[81] 5.1 Суммы градиентов S1, S2, S3, S5 и S6 вычисляют следующим образом:
[82] При этом  вычисляют следующим образом:
вычисляют следующим образом:
[83] При этом  указывают значение компенсации движения в прямом направлении (МС) с его расширенным значением и значение МС в обратном направлении с его расширенным значением. Его можно расширить, скопировав значения МС границы блока или взяв их из позиции опорного пикселя,
указывают значение компенсации движения в прямом направлении (МС) с его расширенным значением и значение МС в обратном направлении с его расширенным значением. Его можно расширить, скопировав значения МС границы блока или взяв их из позиции опорного пикселя,  указывают скорость изменения горизонтального и вертикального компонентов для пикселя в прямом опорном кадре и обратном опорном кадре.
указывают скорость изменения горизонтального и вертикального компонентов для пикселя в прямом опорном кадре и обратном опорном кадре.  относится к разности значений пикселей между следующими двумя значениями: прямым значением МС с его расширенным значением и обратным значением МС с его расширенным значением.
относится к разности значений пикселей между следующими двумя значениями: прямым значением МС с его расширенным значением и обратным значением МС с его расширенным значением.
[84] 5.2 Уточнение вектора движения (MVR, motion vector refinement) vx и vy затем вычисляют следующим образом:

[85] При этом « - оператор сдвига влево, "х>у ? z: а" означает, что когда "х>у" истинно, его значение равно z; когда "х>у" не истинно, его значение равно a; m и thBIO оба являются пороговыми значениями, а г является регулярным членом, чтобы избежать деления на 0. S1, S2, S3, S5 и S6 являются суммами градиентов пикселей. Clip3 указывает на то, что значение в нем гарантированно находится между -thBIO и thBIO.
[86] 5.3 Значение b смещения оптического потока получают в соответствии с MVR.

[87] При этом (х, у) - координаты каждого пикселя внутри текущей CU,  - прямое значение МС и обратное значение МС с его расширенным значением.
- прямое значение МС и обратное значение МС с его расширенным значением.
[88] 5.4 Наконец, на основе значения смещения оптического потока вычисляют предсказанное значение каждого пикселя текущей CU predBIO(x,y):

[89] При этом  - значения МС в прямом направлении и значения МС в обратном направлении.
- значения МС в прямом направлении и значения МС в обратном направлении.
[90] 6. Уточнение вектора движения на стороне декодера (DMVR, Decoder-side Motion Vector Refinement): DMVR применяется в прямом режиме или в режиме пропуска.
[91] Например, технические детали DMVR включают следующие операции:
[92] 6.1 получение блока предсказания и опорных пикселей, необходимых для поиска в области, с использованием MV;
[93] 6.2 получение оптимальной позиции целого пикселя;
[94] Например, если предположить, что блок изображения яркости текущей CU разделен на неперекрывающиеся соседние подблоки, начальными MV всех подблоков являются MV0 и MV1. Для каждого подблока с центром в позициях, соответствующих начальным MV0 и MV1, начинают поиск позиции с минимальным искажением сопоставления с шаблоном в пределах определенного близкого диапазона. Искажение сопоставления с шаблоном определяют путем вычисления значения суммы абсолютных разностей (SAD, Sum of Absolute Differences) между подблоком с центром в соответствующей позиции в области поиска в прямом направлении и подблоком с центром в соответствующей позиции в области поиска в обратном направлении, при этом размер двух подблоков - это ширина, умноженная на высоту.
[95] 6.3 получение оптимальной позиции субпикселя;
[96] Например, на основе значений искажения сопоставления с шаблоном оптимальной позиции целого пикселя, его левой стороны, его правой стороны, над ним и под ним, всего положений, оценивают плоскость вторичного искажения рядом с оптимальной позицией целого пикселя, а позицию с минимальным искажением в плоскости искажения определяют как позицию субпикселя. Формула вычисления выглядит следующим образом:

[97] При этом sad_mid, sad_left, sad_right, sad_top и sad_btm - это соответственно значения искажения сопоставления с шаблоном оптимальной позиции целого пикселя, его левой стороны, его правой стороны, над ним и под ним, всего пять положений, а N - точность.
[98] 6.4 вычисление окончательного блока предсказания на основе оптимального MV.
[99] Ниже приводится краткое описание основных существующих процессов кодирования и декодирования видео.
[100] Пожалуйста, обратитесь к фиг.1(a). Если взять в качестве примера кодирование видео, оно обычно включает процессы предсказания, преобразования, квантования, энтропийного кодирования и т.д. Кроме того, процесс кодирования также может быть реализован в соответствии со структурой (b) на фиг.1.
[101] При этом предсказание можно разделить на два типа: внутреннее предсказание и внешнее предсказание. Внутреннее предсказание использует окружающие кодированные единицы в качестве опорных для предсказания текущих некодированных единиц, эффективно устраняя избыточность в пространственной области. Внешнее предсказание использует соседние кодированные единицы в качестве опорных для предсказания текущих некодированных единиц, эффективно устраняя избыточность во временной области.
[102] Преобразование означает преобразование изображения из пространственной области в область преобразования и представление изображения с использованием коэффициентов преобразования. Большинство изображений содержат более плоские области и медленно меняющиеся области, и соответствующее преобразование может преобразовать изображение из рассеянного распределения в пространственной области в относительно сконцентрированное распределение в области преобразования, путем устранения корреляции в частотной области между сигналами в сочетании с процессом квантования, битовый поток может быть эффективно сжат.
[103] Энтропийное кодирование - это способ кодирования без потерь, который может преобразовывать последовательность символов элементов в двоичный битовый поток для передачи или хранения, а входные символы могут включать квантованные коэффициенты преобразования, информацию MV, информацию о режиме предсказания, синтаксис, связанный с квантованием преобразования, и т.д. Энтропийное кодирование может эффективно удалить избыточность символов видеоэлементов.
[104] Хотя в приведенном выше примере используется кодирование, декодирование видео и кодирование видео являются противоположными процессами, то есть декодирование видео обычно включает энтропийное декодирование, предсказание, деквантование, обратное преобразование, фильтрацию и т.д., и принцип реализации каждого процесса является таким же или аналогичным кодированию видео.
[105] Ниже приводится краткое описание реализации технологии альтернативного временного предсказания вектора движения (ATMVP, Alternative Temporal Motion Vector Prediction).
[106] Процесс существующей технологии ATMVP состоит в основном из следующих этапов:
[107] Этап 1), определение временного предсказания вектора движения (TMVP, Temporal Motion Vector Prediction). Это нужно для определения, удовлетворяет ли информация о движении в позиции А0 текущей CU следующим условиям.
[108] а) позиция А0 существует и находится в том же слайсе и той же единице, что и текущая CU;
[109] b) режим предсказания в позиции А0 является межкадровым режимом;
[110] с) Индекс опорного кадра в позиции А0 согласуется с индексом опорного кадра совмещенного кадра текущего кадра (сначала определяют направление L0, затем определяют направление L1).
[111] При этом позиция А0 является позицией (xCb-1, yCb+CbHeight-1); (xCb, yCb) - координата верхнего левого угла текущей CU, a CbHeight - высота текущей CU.
[112] Этап 2), вычисление позиции центрального опорного блока. Точность определения TMVP на этапе 1) составляет 1/16, ее необходимо сдвинуть на 4 бита вправо, чтобы она представляла целый пиксель, а позицию опорного блока необходимо урезать в область совмещенной наибольшей единицы кодирования (LCU, Largest Coding Unit) в опорном кадре для текущей LCU. То есть, когда позиция опорного блока находится за пределами области совмещенной LCU в опорном кадре для текущей LCU, опорный блок должен быть сдвинут по горизонтали или/и по вертикали точно в пределах области совмещенной LCU в опорном кадре для текущей LCU, схема которого показана на фиг.2.
[113] Позицию центрального опорного блока вычисляют следующим образом:

[114] При этом (xCo1Cb, yCo1Cb) - координата левого верхнего угла центрального опорного блока, (xCtb, yCtb) - координата левого верхнего угла совмещенной LCU в опорном кадре для текущей LCU, PicWidth и PicHeight - соответственно ширина и высота текущего кадра, CtbLog2Size - логарифм размера текущей LCU по основанию 2, (xCo1CtrCb, yCo1CtrCb) - координата позиции центра текущей CU, tempMv[0] и tempMv[1] являются соответственно горизонтальным MV и вертикальным MV позиции А0.
[115] Этап 3), определение режима предсказания центрального опорного блока. Если режим предсказания не является режимом внешнего предсказания, тогда ctrPredFlagL0 и ctrPredFlagL1 равны 0; в противном случае режим предсказания является режимом внешнего предсказания, и процесс переходит к этапу 4).
[116] Этап 4), регулировка опорной позиции. Поскольку размер подблока равен 8*8, информация о движении использует подблок 8*8 в качестве единицы, координата левого верхнего угла центрального опорного блока должна быть скорректирована до числа, кратного 8. Формула корректировки выглядит следующим образом:
[117] Этап 5), получение информации о движении скорректированного центрального опорного блока. Если режим предсказания скорректированного центрального опорного блока представляет собой режим внутреннего предсказания или внутрикадрового копирования блока (IBC, intra-frame block сору), тогда FlagLXCol=0; в противном случае необходимо определить, существует ли информация о движении в направлении L0 и направлении L1 скорректированного центрального опорного блока, и если да, то FlagLXCol=1, и получить информацию о движении в направлении L0 и направлении L1 скорректированного центрального опорного блока.
[118] Например, LX=L0 или LX=L1, когда режим предсказания скорректированного центрального опорного блока представляет собой внутреннее предсказание или режим IBC, тогда FlagL0Col=0 и FlagL1Col=0.
[119] Если режим предсказания скорректированного центрального опорного блока не является ни внутренним предсказанием, ни режимом IBC, когда существует информация о движении в направлении L0 скорректированного центрального опорного блока, FlagL0Col=1; когда информация о движении в направлении L0 скорректированного центрального опорного блока не существует, FlagL0Col=0; когда существует информация о движении в направлении L1 скорректированного центрального опорного блока, FlagL1Col=1; когда информация о движении направления L1 скорректированного центрального опорного блока не существует, FlagL1Cor=0.
[120] Когда FlagLXCol=1, если долговременный опорный кадр текущего кадра не равен долговременному опорному кадру совмещенного кадра, информацию о движении скорректированного центрального опорного блока определяют как недоступную, ctrPredFlagLX=0; в противном случае информацию о движении скорректированного центрального опорного блока масштабируют к первому кадру, указывающему на ListX (Х=0 или 1), и в качестве информации о движении текущей позиции центрального опорного блока ctrPredFlagLX=1.
[121] Этап 6), когда ctrPredFlagLX=1, вычисление информации о движении для каждого подблока путем прохождения каждого подблока в согласующейся CU и для любого подблока обрезка его в область LCU, в которой находится согласующаяся CU. Если информация о движении обрезанного подблока доступна, информацию о движении обрезанного подблока масштабируют к первому кадру, указывающему на ListX, и масштабированную информацию о движении передают подблоку в соответствующей позиции в текущей CU; если информация о движении обрезанного подблока недоступна, информацию о движении центральной позиции скорректированного центрального опорного блока масштабируют к первому кадру, указывающему на ListX, и масштабированную информацию о движении передают подблоку в соответствующей позиции в текущей CU.
[122] Например, в соответствии с информацией о движении соседнего блока текущей CU в совмещенном кадре находят CU, соответствующую соседней CU текущей CU, а затем предоставляют информацию о движении каждого подблока в CU в соответствующей позиции в совмещенном кадре CU каждому подблоку в текущей CU.
[123] В совмещенном кадре нахождение CU в соответствующей позиции для текущей CU зависит от информации о движении окружающей CU текущей CU. Если информация о движении окружающей CU неточна, это приведет к тому, что информация о движении CU, найденная в соответствующей позиции, также будет ненадежной, что повлияет на производительность кодирования и декодирования.
[124] Чтобы повысить надежность рабочей информации согласующейся CU и оптимизировать производительность кодирования и декодирования, в вариантах осуществления настоящей заявки информация о движении совмещенной CU в совмещенном кадре текущей CU используется для определения согласующейся CU, и найденная согласующаяся CU смещается рядом способов, например вверх, вниз, влево, вправо и т.д., что приводит к множеству временных режимов-кандидатов, что в определенной степени позволяет избежать проблемы неточного нахождения согласующейся CU из-за неточной информации о движении окружающей CU.
[125] Основной процесс реализации вариантов осуществления настоящего изобретения может включать следующие 6 частей:
[126] Часть 1 (может быть обозначена буквой А): кодирование/анализ значения флага режима расширенного временного предсказания вектора движения (ETMVP) и значения индекса режима ETMVP в соответствии с условиями кодирования/декодирования текущей CU;
[127] Часть 2 (может быть обозначена как В): определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU;
[128] Часть 3 (может быть обозначена буквой С): построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
[129] Часть 4 (может быть обозначена как D): получение соответствующего режима ETMVP из списка расширенных временных кандидатов-режимов в соответствии со значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей режиму ETMVP;
[130] Часть 5 (может быть обозначена буквой Е): получение информации о движении каждого подблока в текущей CU в соответствии с информацией о координатах целевой согласующейся CU;
[131] Часть 6 (может быть обозначена как F): выполнение МС для соответствующего подблока в текущей CU на основе информации о движении каждого подблока в текущей CU.
[132] В вариантах осуществления настоящей заявки порядок вышеуказанных шести частей может быть скорректирован.
[133] Чтобы сделать вышеуказанные цели, признаки и преимущества вариантов осуществления настоящей заявки более ясными и понятными, техническое решение в вариантах осуществления настоящей заявки будет далее подробно описано ниже с помощью прилагаемых чертежей.
[134] На фиг.3 показана блок-схема способа декодирования, предусмотренного вариантами осуществления настоящей заявки, при этом способ декодирования может применяться в устройстве декодирования. Как видно на фиг.3, процесс способа декодирования может включать следующие этапы:
[135] На этапе S300 получают значение флага режима ETMVP и значение индекса режима ETMVP для текущей CU.
[136] В вариантах осуществления настоящей заявки текущая CU может быть любой CU в изображении, подлежащем обработке. В варианте осуществления изобретения изображение, подлежащее обработке, может быть разделено на различные CU, а затем каждая CU может обрабатываться в соответствии с определенным порядком. При этом размер и форма каждой CU могут быть установлены в соответствии с заранее заданными правилами разделения.
[137] Например, при декодировании текущей CU может быть получено значение флага режима ETMVP и значение индекса режима ETMVP для текущей CU;
[138] Например, значение флага режима ETMVP текущей CU может быть проанализировано из битового потока или получено, когда текущая CU удовлетворяет определенным условиям.
[139] Например, значение индекса режима ETMVP текущей CU может быть проанализировано из битового потока или получено, когда текущая CU удовлетворяет определенным условиям.
[140] Когда полученное значение флага режима ETMVP является первым значением, выполняют этапы 310~этапы 340.
[141] Например, значение флага режима ETMVP может включать значение, указывающее на то, что режим ETMVP включен (называемое в настоящей заявке первым значением, например 1).
[142] На этапе S310 определяют информацию о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU.
[143] В вариантах осуществления настоящей заявки, если полученное значение флага режима ETMVP является первым значением, оно указывает на то, что текущая CU разрешает режим ETMVP, затем может быть определена информация о координатах начальной согласующейся CU.
[144] Например, информация о координатах начальной согласующейся CU текущей CU может быть определена в соответствии с информацией о координатах текущей CU.
[145] Например, информация о координатах начальной согласующейся CU может быть информацией о координатах начальной согласующейся CU в соответствующем опорном изображении, например координатами левого верхнего угла.
[146] На этапе S320 строят список расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU.
[147] В вариантах осуществления настоящей заявки, когда определена информация о координатах начальной согласующейся CU текущей CU, список расширенных временных кандидатов может быть построен на основе информации о координатах начальной согласующейся CU.
[148] Например, список расширенных временных кандидатов включает по меньшей мере один номер режима ETMVP.
[149] Например, информация о координатах согласующейся CU, соответствующей разным номерам режимов ETMVP, может быть разной.
[150] На этапе S330 получают соответствующий номер режима ETMVP из списка расширенных временных кандидатов в соответствии с полученным значением индекса режима ETMVP и определяют информацию о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP.
[151] В вариантах осуществления настоящей заявки согласно значению индекса режима ETMVP для текущей CU, полученному на этапе S300, соответствующий номер режима ETMVP может быть получен из списка расширенных временных кандидатов, и может быть определена информация о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP.
[152] Например, целевая согласующаяся CU может быть начальной согласующейся CU или согласующейся CU, полученной путем смещения начальной согласующейся CU вверх/вниз/влево/вправо.
[153] Например, информация о координатах целевой согласующейся CU может быть согласована с информацией о координатах начальной согласующейся CU или скорректирована в соответствии с заранее заданным смещением на основе информации о координатах начальной согласующейся CU.
[154] На этапе S340 информацию о движении целевой согласующейся CU определяют в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определяют информацию о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU.
[155] В вариантах осуществления настоящей заявки, когда определяют информацию о координатах целевой согласующейся CU, информация о движении целевой согласующейся CU может быть определена в соответствии с информацией о координатах целевой согласующейся CU. Например, информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU.
[156] Например, информация о движении подблока в соответствующей позиции в текущей CU может быть определена в соответствии с информацией о движении каждого подблока в целевой согласующейся CU. Например, информацию о движении подблока в строке h и столбце 1 в текущей CU определяют на основе информации о движении подблока в строке h и столбце 1 в целевой согласующейся CU.
[157] В некоторых вариантах осуществления изобретения на этапе S300 получение значения флага режима ETMVP для текущей CU может включать: когда текущая CU удовлетворяет первому условию анализа, значение флага режима ETMVP анализируют из битового потока; в противном случае значение флага режима ETMVP определяют как второе значение, и когда значение флага режима ETMVP является вторым значением, это указывает на то, что текущая CU запрещает режим ETMVP.
[158] Например, с учетом того, что использование режима ETMVP обычно требует выполнения определенных условий, если эти условия не выполняются, режим ETMVP может быть неприменим. В этом случае значение флага режима ETMVP может быть получено напрямую, в то время как нет необходимости анализировать битовый поток для получения значения флага режима ETMVP.
[159] Например, в зависимости от того, удовлетворяет ли текущая CU указанному условию (называемому первым условием анализа в настоящей заявке), определяют, следует ли анализировать значение флага режима ETMVP для текущей CU из битового потока или получить значение флага режима ETMVP для текущей CU напрямую.
[160] Например, когда текущая CU удовлетворяет первому условию анализа, анализируют значение флага режима ETMVP из битового потока; когда текущая CU не удовлетворяет первому условию анализа, нет необходимости анализировать значение флага режима ETMVP из битового потока, но можно определить, что текущая CU запрещает режим ETMVP, и значение флага режима ETMVP для текущей CU является значением, указывающим на то, что текущая CU запрещает режим ETMVP (называемое вторым значением в настоящей заявке).
[161] В варианте осуществления изобретения, как описано выше, текущая CU удовлетворяет первому условию анализа, что может включать одно или более из следующего: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера; согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает использовать способы ETMVP; текущая CU удовлетворяет условию для использования углового взвешенного предсказания (AWP, Angular Weighted Prediction) или условию для использования конечного выражения вектора движения (UMVE, Ultimate Motion Vector Expression).
[162] Например, с учетом того, что режим ETMVP имеет определенные требования к использованию в отношении режима предсказания и размера CU, в зависимости от того, удовлетворяют ли режим предсказания и/или размер CU этим требованиям, можно определить, может ли режим ETMVP применяться к CU.
[163] Кроме того, когда текущая CU запрещает способы ETMVP в соответствии с высокоуровневым синтаксисом, можно определить, что текущая CU запрещает ETMVP.
[164] Например, можно определить, что текущая CU удовлетворяет первому условию анализа, когда выполняется одно или более из следующих условий: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера; согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает использовать способы ETMVP; текущая CU удовлетворяет условию для использования AWP или условию для использования UMVE.
[165] Например, определяют, что текущая CU удовлетворяет первому условию анализа, когда режим предсказания текущей CU является режимом пропуска или прямым режимом, или когда текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера, или когда текущая CU включает способы ETMVP в соответствии с высокоуровневым синтаксисом уровня последовательности, или когда текущая CU удовлетворяет условию для использования AWP или условию для использования UMVE.
[166] Например, когда режим предсказания текущей CU является режимом пропуска или прямым режимом, определяют, что текущая CU удовлетворяет первому условию анализа.
[167] Например, когда текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера, определяют, что текущая CU удовлетворяет первому условию анализа.
[168] Например, когда текущая CU разрешает способы ETMVP в соответствии с высокоуровневым синтаксисом уровня последовательности, определяют, что текущая CU удовлетворяет первому условию анализа.
[169] Например, когда текущая CU удовлетворяет условию для использования AWP или условию для использования UMVE, определяют, что текущая CU удовлетворяет первому условию анализа.
[170] В качестве другого примера, если режим предсказания текущей CU является режимом пропуска или прямым режимом, текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера, и в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает способы ETMVP, то есть, когда все вышеперечисленные условия выполнены, можно определить, что текущая CU удовлетворяет первому условию анализа.
[171] В качестве другого примера, если режим предсказания текущей CU является режимом пропуска или прямым режимом, текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера, в соответствии с высокоуровневым синтаксисом уровня последовательности, текущая CU разрешает способы ETMVP, и текущая CU удовлетворяет условию для использования AWP или условию для использования UMVE, то есть, когда все вышеуказанные условия выполняются, можно определить, что текущая CU удовлетворяет первому условию анализа.
[172] Например, текущая CU имеет размер, удовлетворяющий заданному ограничению размера, который может включать то, что текущая CU имеет ширину и высоту, которые больше или равны N0. Например, N0=8.
[173] Следует отметить, что вышеприведенное описание того, что текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера, является лишь конкретным примером соответствующей реализации в вариантах осуществления настоящей заявки и не является ограничением объема защиты настоящего изобретения. В вариантах осуществления настоящей заявки текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера, что также может включать другие ситуации. Например, ширина текущей CU больше или равна N0, высота текущей CU больше или равна N0, или высота и ширина текущей CU больше или равны N0, а ширина и высота одновременно не равны N0 и т.д.
[174] Например, текущая CU удовлетворяет условию для использования AWP, что может включать: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает способы AWP; текущая CU имеет ширину и высоту, которые больше или равны N1, но меньше или равны N2; типом текущего кадра изображения является В-изображение.
[175] Например, текущая CU удовлетворяет условию для использования UMVE, что может включать: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает способы UMVE.
[176] В варианте осуществления изобретения текущая CU удовлетворяет первому условию анализа, что включает: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера; согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает использовать способы ETMVP; текущая CU удовлетворяет условию для AWP или условию для использования UMVE.
[177] В варианте осуществления изобретения флаг режима ETMVP кодируется контекстно-ориентированным адаптивным двоичным арифметическим кодированием (САВАС, Context-based Adaptive Binary Arithmetic Coding) с помощью контекстной модели.
[178] В другом варианте осуществления изобретения флаг режима ETMVP кодируется с помощью САВАС с несколькими контекстными моделями. Например, эти несколько контекстных моделей могут быть определены на основе размера текущей CU. Например, размер текущей CU может быть выражен, не ограничиваясь этим, как: ширина и/или высота текущей CU, максимальное или минимальное значение ширины и высоты текущей CU или произведение ширины и высоты текущей CU.
[179] В некоторых вариантах осуществления изобретения на этапе S300 получение значения индекса режима ETMVP для текущей CU может включать: когда текущая CU удовлетворяет второму условию анализа, анализ значения индекса режима ETMVP из битового потока; в противном случае определение значения индекса режима ETMVP в качестве третьего значения.
[180] Например, если значение индекса режима ETMVP является третьим значением, это указывает на то, что текущая CU запрещает режим ETMVP.
[181] Например, с учетом того, что использование режима ETMVP обычно требует выполнения определенных условий, если эти условия не выполняются, режим ETMVP может быть неприменим. В этом случае значение индекса режима ETMVP может быть получено напрямую, в то время как нет необходимости анализировать битовый поток для получения значения индекса режима ETMVP.
[182] Например, когда текущая CU удовлетворяет указанному условию (называемому вторым условием анализа в настоящей заявке), значение индекса режима ETMVP может быть проанализировано из битового потока; в противном случае значение индекса режима ETMVP может быть определено как третье значение. Если значение индекса режима ETMVP является третьим значением, это указывает на то, что текущая CU запрещает режим ETMVP.
[183] Например, третье значение может быть таким же, как первое значение или второе значение, упомянутые выше, или может отличаться как от первого значения, так и от второго значения, упомянутых выше.
[184] В варианте осуществления изобретения текущая CU удовлетворяет второму условию анализа, которое может включать одно или более из следующего: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU разрешает режим ETMVP.
[185] В варианте осуществления изобретения осуществляют обратную бинаризацию значения индекса режима ETMVP на основе усеченного унарного значения с максимальным значением 4, при этом усеченное унарное значение использует строку бинов, содержащую до 4 бинов, и каждый из бинов использует отдельную контекстную модель, так что всего имеется четыре контекстных модели.
[186] Например, чтобы снизить стоимость битовой скорости передачи при кодировании и улучшить производительность кодирования и декодирования, осуществляют обратную бинаризацию значения индекса режима ETMVP на основе усеченного унарного значения с максимальным значением 4, при этом усеченное унарное значение использует строку бинов до 4 бинов, и каждый из бинов использует отдельную контекстную модель, так что всего имеется четыре контекстных модели.
[187] Реализацию обратной бинаризации значения индекса режима ETMVP можно увидеть в таблице 1:
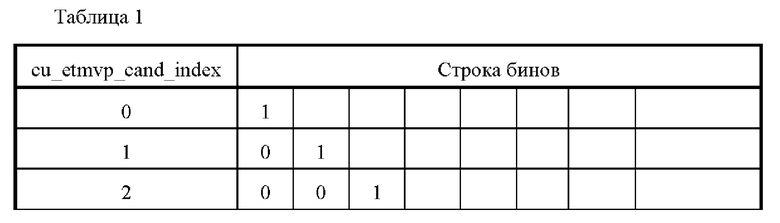

[188] где cu_etmvp_cand_index представляет собой значение индекса режима ETMVP.
[189] В некоторых вариантах осуществления изобретения на этапе S310 определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU включает: определение временного опорного изображения, в котором расположена согласующаяся CU, в соответствии с типом текущего кадра изображения; определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU.
[190] Например, чтобы определить информацию о координатах начальной согласующейся CU текущей CU, можно определить тип кадра изображения (здесь также называемый текущим изображением), в котором находится текущая CU (как тип текущего кадра изображения), а затем на основе типа текущего кадра изображения определяют временное опорное изображение, в котором находится согласующаяся CU.
[191] Например, если типом текущего кадра изображения является Р-изображение, временное опорное изображение находится в списке 0 опорных изображений, и его значение индекса опорного кадра равно 0; если типом текущего кадра изображения является В-изображение, временное опорное изображение находится в списке 1 опорных изображений, и его значение индекса опорного кадра равно 0.
[192] Например, когда определяют временное опорное изображение, в котором находится согласующаяся CU, информация о координатах начальной согласующейся CU во временном опорном изображении может быть определена в соответствии с информацией о координатах текущей CU;
[193] В варианте осуществления изобретения информация о координатах текущей CU представляет собой координату левого верхнего угла текущей CU в текущем изображении; информация о координатах согласующейся CU представляет собой координату левого верхнего угла согласующейся CU во временном опорном изображении.
[194] Например, согласующаяся CU может включать начальную согласующуюся CU или целевую согласующуюся CU, то есть, если иное не указано в дальнейшем, информация о координатах начальной согласующейся CU может относиться к координате левого верхнего угла начальной согласующейся CU, и информация о координатах целевой согласующейся CU может относиться к координате левого верхнего угла целевой согласующейся CU.
[195] В варианте осуществления изобретения, как упомянуто выше, определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU может включать: определение информации о координатах начальной согласующейся CU в соответствии с левой верхней координатой текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и левой верхней координатой текущей CU в изображении.
[196] Например, LCU может включать одну или более CU.
[197] Например, информация о координатах согласующейся CU текущей CU может быть определена в соответствии с левой верхней координатой текущей LCU в изображении, размером LCU, размером текущей CU, размером текущего изображения и левой верхней координатой текущей CU на изображении.
[198] В варианте осуществления изобретения, как упомянуто выше, определение информации о координатах начальной согласующейся CU в соответствии с левой верхней координатой текущей LCU в изображении, размером LCU, размером текущего изображения, размером текущей CU и левой верхней координатой текущей CU в изображении может включать: определение абсциссы начальной согласующейся CU в соответствии с абсциссой левого верхнего угла текущей LCU на изображении, размером LCU, шириной текущей CU, шириной текущего изображения и абсциссой левого верхнего угла текущей CU на изображении; определение ординаты начальной согласующейся CU в соответствии с ординатой левого верхнего угла текущей LCU на изображении, размером LCU, высотой текущей CU, высотой текущего изображения и ординатой левого верхнего угла текущей CU на изображении.
[199] Например, информация о координатах текущей CU представляет собой координату левого верхнего угла текущей CU в текущем изображении; информация о координатах согласующейся CU представляет собой координату левого верхнего угла согласующейся CU во временном опорном изображении.
[200] Например, в системе координат в плоскости изображения по горизонтальной оси положительное направление - вправо, а по вертикальной оси - положительное направление вниз (то же самое внизу).
[201] Например, если (Xpos, Ypos) - информация о координатах текущей CU на изображении, (x_ctb_pos, y_ctb_pos) - координата левого верхнего угла текущей LCU на изображении, cu_width и cu_height - это ширина и высота текущей CU, а horizontal_size и vertical_size - ширина и высота текущего изображения, leu_size - размер LCU, координаты согласующейся CU (Мх,Му) определяют следующим образом:

[202] Например, если (Xpos, Ypos) - информация о координатах текущей CU на изображении, (x_ctb_pos, y_ctb_pos) - координата левого верхнего угла текущей LCU на изображении, cu_width и cu_height - ширина и высота текущей CU, a horizontal_size и vertical_size - ширина и высота текущего изображения, leu_size - размер LCU, координаты согласующейся CU (Мх,Му) определяют следующим образом:

[203] В некоторых вариантах осуществления изобретения на этапе S320 построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU может включать: определение по меньшей мере одного номера режима ETMVP в соответствии с информацией о координатах начальной согласующейся CU; построение списка расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP.
[204] Например, по меньшей мере один номер режима ETMVP может включать: номер режима ETMVP, соответствующий информации о координатах начальной согласующейся CU, и один или более номеров режимов ETMVP, соответствующих нескольким новым согласующимся CU (если доступны), полученным путем смещения начальной согласующейся CU.
[205] Например, когда по меньшей мере один номер режима ETMVP определен в соответствии с информацией о координатах начальной согласующейся CU, список расширенных временных кандидатов может быть построен согласно по меньшей мере одному номеру режима ETMVP.
[206] Например, при построении списка расширенных временных кандидатов длина списка расширенных временных кандидатов может быть инициализирована в 0 нуль (0), то есть начальная длина списка расширенных временных кандидатов равна 0.
[207] Например, длина списка расширенных временных кандидатов может увеличиваться по мере увеличения номеров режимов ETMVP.
[208] В варианте осуществления изобретения информация о координатах согласующейся CU представляет собой координату левого верхнего угла согласующейся CU во временном опорном изображении; построение списка расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP может включать:
добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Му+8 меньше или равно меньшим значениям у ctbjos+lcu size-cuheight и verticalsize-cuheight, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Мх+8 меньше или равно меньшим значениям x_ctb_pos+lcu_size-cu_width и horizontalsize-cuwidth, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Му-8 больше или равно y_ctb_pos, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление режима ETMVP с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Мх-8 больше или равно x_ctb_pos, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции В3, то добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1.
[209] Например, (Мх, My) - информация о координатах начальной согласующейся CU, (х ctb_pos, у ctb_pos) - координата левого верхнего угла текущей LCU на изображении, leu size - размер LCU, cu width и cu height - ширина и высота текущей CU, a horizontalsize и verticalsize - соответственно ширина и высота текущего изображения.
[210] Например, А1 - это блок 4*4 в левом верхнем углу начальной согласующейся CU, В1 - блок 4*4 непосредственно слева от А1, и С1 - блок 4*4 непосредственно над A1; А2 - это блок 4*4 в правом верхнем углу начальной согласующейся CU, В2 - блок 4*4 непосредственно справа от А2, и С2 - блок 4*4 непосредственно над А2; A3 - это блок 4*4 в левом нижнем углу начальной согласующейся CU, В3-блок 4*4 непосредственно слева от A3, и С3-блок 4*4 непосредственно под A3; А4 - это блок 4*4 в правом нижнем углу начальной согласующейся CU, В4 - блок 4*4 непосредственно справа от А4, и С4 - блок 4*4 непосредственно под А4. Схему можно увидеть на фиг.4.
[211] Например, при смещении согласующейся CU смещение указывается в единицах 8 пикселей. Например, при смещении согласующейся CU вниз, согласующаяся CU смещается вниз на 8 пикселей.
[212] С учетом того, что в вариантах осуществления настоящей заявки новую согласующуюся CU получают путем смещения согласующейся CU вверх/вниз/влево/вправо, добавляют одну или более возможных согласующихся CU для добавления новой возможной информации о движении.
[213] Возьмем смещение вниз согласующейся CU в качестве примера, принимая во внимание, что, когда информация о движении позиции А1 и позиции С3 одинакова, а информация о движении позиции А2 и позиции С4 одинакова, существует высокая вероятность того, что информация о движении новой согласующейся CU, полученная путем смещения вниз согласующейся CU, будет такой же, как информация о движении начальной согласующейся CU, и на этот раз смещение может не давать новую информацию о движении.
[214] Следовательно, когда информация о движении позиции А1 сравнивается с позицией С3, а информация о движении позиции А2 сравнивается с позицией С4, и по меньшей мере один из двух результатов сравнения несовместим, можно определить, что может быть получена новая информация о движении нисходящим смещением, то есть согласующаяся CU, полученная с помощью нисходящего смещения, может использоваться в качестве возможной согласующейся CU.
[215] Например, при смещении согласующейся CU также необходимо следить за тем, чтобы граница в направлении смещения новой согласующейся CU, полученной после смещения, не выходила за пределы диапазона координат, соответствующего LCU, в котором расположена согласующаяся CU (до смещения), то есть не выходили за границу LCU в направлении смещения. Причем граница не выходит за пределы диапазона координат, соответствующего изображению, где находится согласующаяся CU, то есть не выходит за границу изображения в направлении смещения.
[216] Например, для смещения вверх граница в направлении смещения является верхней границей; для смещения вниз граница в направлении смещения является нижней границей; для смещения влево граница в направлении смещения является левой границей; для смещения вправо граница в направлении смещения является правой границей.
[217] Например, все еще используя смещение вниз в качестве примера, при смещении согласующейся CU вниз, с одной стороны, ордината смещения (т.е. Му+8) должна быть меньше или равна у ctb_pos+leu_size - cu_height (то есть нижняя граница новой согласующейся CU, полученной после смещения, не превышает нижнюю границу LCU, где согласующаяся CU находится до смещения), с другой стороны, ордината смещения должна быть меньше или равна verticalsize - cuheight (то есть нижняя граница новой согласующейся CU, полученной после смещения, не превышает нижнюю границу изображения, на котором находится согласующаяся CU до смещения), то есть Му+8 должно быть меньше или равно меньшему из у ctbjtos+leu size - cu height и verticalsize - cuheight.
[218] В варианте осуществления изобретения на этапе S320 построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU может также включать: когда длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле до тех пор, пока длина списка расширенных временных кандидатов не станет равна 5: добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1.
[219] Например, с учетом того, что при смещении согласующейся CU вверх, вниз, влево, вправо, при каждом смещении можно получить подходящую возможную согласующуюся CU, возможные согласующиеся CU могут включать согласующуюся CU перед смещением, и 4 согласующиеся CU, полученные путем сопоставления, то есть длина списка расширенных временных кандидатов равна 5.
[220] Чтобы повысить надежность декодирования и избежать ошибок декодирования, когда длина списка расширенных временных кандидатов, построенного описанным выше способом, меньше 5, длина списка расширенных временных кандидатов может быть увеличена до 5 согласно политике.
[221] Например, когда длина списка расширенных временных кандидатов меньше 5, в список расширенных временных кандидатов может быть добавлен другой номер, являющийся последним номером режима ETMVP в списке, что увеличивает длину списка расширенных временных кандидатов на 1; операции выполняются в цикле до тех пор, пока длина списка расширенных временных кандидатов не станет равной 5.
[222] В некоторых вариантах осуществления изобретения в соответствии со значением индекса режима ETMVP получение соответствующего номера режима ETMVP из списка расширенных временных кандидатов и определение информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP, может включать:
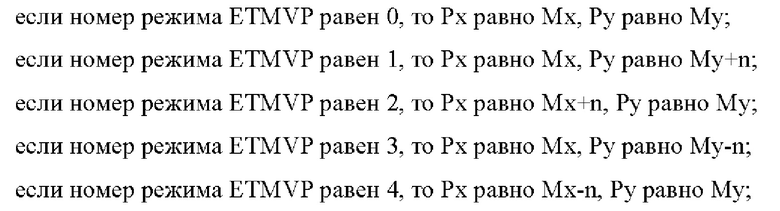
[223] Например, (Мх, My) - координата левого верхнего угла начальной согласующейся CU, а (Рх, Ру) - координата левого верхнего угла целевой согласующейся CU.
[224] Например, новую согласующуюся CU получают путем смещения согласующейся CU вверх/вниз/влево/вправо нап пикселей. Например, n=8.
[225] Предположим, что номер режима ETMVP, соответствующий начальной согласующейся CU, равен 0, номер режима ETMVP, соответствующий согласующейся CU, полученной смещением вниз, равен 1, номер режима ETMVP, соответствующий согласующейся CU, полученной смещением вправо, равен 2, номер режима ETMVP, соответствующий согласующейся CU, полученной смещением вверх, равен 3, а номер режима ETMVP, соответствующий согласующейся CU, полученной смещением влево, равен 4.
[226] Когда список расширенных временных кандидатов строится описанным выше образом, в соответствии со значением индекса режима ETMVP, полученным на этапе S300, соответствующий номер режима ETMVP может быть получен из списка расширенных временных кандидатов.
[227] Например, если номер режима ETMVP равен 1, то целевая согласующаяся CU представляет собой временную опорную CU, полученную посредством общего смещения вниз начальной согласующейся CU на п пикселей, то есть Рх равно Мх, Ру равно Му+п.
[228] Если номер режима ETMVP равен 2, то целевая согласующаяся CU является временной опорной CU, полученной посредством полного смещения вправо начальной согласующейся CU на п пикселей, то есть Рх равно Мх+n, Ру равно My.
[229] Если номер режима ETMVP равен 3, то целевая согласующаяся CU является временной опорной CU, полученной посредством общего смещения вверх начальной согласующейся CU на п пикселей, то есть Рх равно Мх, Ру равно Му-п.
[230] Если номер режима ETMVP равен 4, то целевая согласующаяся CU является временной опорной CU, полученной посредством общего смещения влево начальной согласующейся CU на п пикселей, то есть Рх равно Мх-n, Ру равно My.
[231] В некоторых вариантах осуществления изобретения на этапе S340 определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU может включать: для любого подблока в целевой согласующейся CU, когда тип текущего кадра изображения является Р-изображением, если информация о движении в прямом направлении для подблока доступна, то информацию о движении в прямом направлении для подблока масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[232] В некоторых вариантах осуществления изобретения на этапе S340 определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU может включать: для любого подблока в целевой согласующейся CU, когда типом текущего кадра изображения является В-изображение, если информация о движении в прямом направлении и информация о движении в обратном направлении для подблока доступны, информацию о движении в прямом направлении и информацию о движении в обратном направлении для подблока масштабируют соответственно с указанием на первый кадр List0 и первый кадр List1, и масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU; если информация о движении в прямом направлении для подблока доступна, но информация о движении в обратном направлении недоступна, информацию о движении в прямом направлении подблока масштабируют с указанием на первый кадр List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; если информация о движении в обратном направлении для подблока доступна, но информация о движении в прямом направлении недоступна, информацию о движении в обратном направлении для подблока масштабируют с указанием на первый кадр List1, и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[233] Например, чтобы повысить эффективность определения информации о движении каждого подблока текущей CU, для любого подблока в целевой согласующейся CU можно определить, доступна ли информация о движении подблока.
[234] Например, когда типом текущего кадра изображения является Р-изображение, может быть определено, доступна ли информация о движении в прямом направлении для подблока; когда типом текущего кадра изображения является В-изображение, может быть определено, доступна ли информация о движении в прямом направлении и информация о движении в обратном направлении для подблока соответственно.
[235] Например, для любого подблока в целевой согласующейся CU, когда определено, что информация о движении в прямом направлении для подблока доступна, информация о движении в прямом направлении для подблока может быть масштабирована к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[236] Например, для любого подблока в целевой согласующейся CU, когда определено, что информация о движении в обратном направлении для подблока доступна (когда типом текущего кадра изображения является В-изображение), информация о движении в обратном направлении подблока может масштабироваться с указанием на первый кадр списка List1, и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU.
[237] Например, для любого подблока в целевой согласующейся CU, когда и информация о движении в прямом направлении, и информация о движении в обратном направлении для подблока определены как доступные (когда типом текущего кадра изображения является В-изображение), информация о движении в прямом направлении и информация о движении в обратном направлении подблока может масштабироваться соответственно с указанием на первый кадр List0 и первый кадр List1, а масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU.
[238] В некоторых вариантах осуществления изобретения на этапе S340 определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU может включать: для любого подблока в целевой согласующейся CU, когда типом текущего кадра изображения является Р-изображение, если информация о движении в прямом направлении для подблока недоступна, когда информация о движении в прямом направлении первого окружающего блока текущей CU доступна, информацию о движении в прямом направлении первого окружающего блока масштабируют к первому кадру из List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда информация о движении в прямом направлении первого окружающего блока недоступна, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU; когда типом текущего кадра изображения является В-изображение, если не доступны ни информация о движении в прямом направлении, ни информация о движении в обратном направлении для подблока, когда доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении и информацию о движении в обратном направлении первого окружающего блока масштабируют к первому кадру List0 и первому кадру List1 соответственно, а масштабированную информацию о движении в прямом направлении и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU соответственно; когда доступна информация о движении в прямом направлении первого окружающего блока, но его информация о движении в обратном направлении недоступна, его информацию о движении в прямом направлении масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда информация о движении в обратном направлении первого окружающего блока доступна, но его информация о движении в прямом направлении недоступна, его информацию о движении в обратном направлении масштабируют к первому кадру списка List1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU; когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU.
[239] Например, информация о движении подблока в текущей CU может быть определена в соответствии с информацией о движении окружающего блока текущей CU (называемого первым окружающим блоком в настоящей заявке).
[240] Например, первый окружающий блок текущей CU может включать, не ограничиваясь этим, любой декодированный соседний блок текущей CU или блок, не являющийся соседним для текущей CU.
[241] Например, первый окружающий блок текущей CU можно увидеть на фиг.5. Как видно на фиг.5, Е - текущая CU, и первый окружающий блок текущей CU может включать любой из А, В, С, D, F и G.
[242] Например, CU включает по меньшей мере один подблок, ширина каждого подблока не превышает ширины текущей CU, а высота каждого подблока не превышает высоты текущей CU, например, каждый подблок представляет собой блок 8*8.
[243] В варианте осуществления изобретения первый окружающий блок текущей CU обозначен буквой F на фиг.5. Например, размер F может быть 8*8, то есть первый окружающий блок - это блок 8*8, соседний с левым нижним углом текущей CU. Например, размер F может быть 4*4, то есть первый окружающий блок - это блок 4*4, соседний с левым нижним углом текущей CU.
[244] Например, когда типом текущего кадра изображения является Р-изображение, когда информация о движении в прямом направлении подблока целевой согласующейся CU недоступна, информация о движении подблока текущей CU также может быть определена в соответствии с информацией о движении первого окружающего блока текущей CU.
[245] Например, когда типом текущего кадра изображения является В-изображение, когда недоступна ни информация о движении в прямом направлении, ни информация о движении в обратном направлении подблока целевой согласующейся CU, информация о движении подблока текущей CU также может быть определена в соответствии с информацией о движении первого окружающего блока текущей CU.
[246] Например, когда типом текущего кадра изображения является Р-изображение, когда ни информация о движении в прямом направлении подблока целевой согласующейся CU, ни информация о движении в прямом направлении первого окружающего блока текущей CU изображения недоступны, нулевая информация о движении может предоставляться подблоку в соответствующей позиции в текущей CU.
[247] Например, когда типом текущего кадра изображения является В-изображение, когда недоступны ни информация о движении в прямом направлении, ни информация о движении в обратном направлении для подблока целевой согласующейся CU, и когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевая информация о движении может предоставляться подблоку в соответствующей позиции в текущей CU.
[248] В некоторых вариантах осуществления изобретения, как показано на фиг.6, после определения информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU на этапе S340 способ может также включать этап S350: в соответствии с информацией о движении каждого подблока в текущей CU, выполнение МС для соответствующего подблока в текущей CU.
[249] Например, когда информацию о движении каждого подблока в текущей CU определяют, как упомянуто выше, согласно информации о движении каждого подблока в текущей CU, МС может выполняться для соответствующего подблока в текущей CU. Например, МС может выполняться для подблока в строке h и столбце 1 в текущей CU в соответствии с информацией о движении подблока в строке h и столбце 1 в текущей CU.
[250] В варианте осуществления изобретения на этапе S350, в соответствии с информацией о движении каждого подблока в текущей CU, выполнение МС для соответствующего подблока в текущей CU может включать следующее: для любого подблока текущей CU не используют DMVR для его информации о движении; если подблок удовлетворяет условиям применения BIO, МС выполняют для подблока в соответствии с информацией о движении подблока, и способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока; в противном случае выполняют МС для подблока в соответствии с информацией о движении подблока и получают матрицу отсчетов предсказания подблока.
[251] Например, отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
[252] В варианте осуществления изобретения подблок удовлетворяет условиям применения BIO, что включает: в соответствии с высокоуровневым синтаксисом уровня последовательности разрешены способы BIO; точность MV текущей CU равна 0; подблок использует двунаправленное предсказание; для этого подблока опорный кадр, значение индекса которого равно refIdxL0 в списке 0 опорных изображений, и опорный кадр, значение индекса которого равно refIdxL1 в списке 1 опорных изображений, соответственно отображают с обеих сторон текущего кадра.
[253] Например, варианты осуществления настоящей заявки также предоставляют способ кодирования, который может применяться в устройстве кодирования и может включать следующие этапы.
[254] На этапе Т100 определяют информацию о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU. Подробности реализации этого этапа можно найти в описании этапа S310 в варианте осуществления изобретения, показанном на фиг.3, и они не будут дублироваться здесь.
[255] На этапе Т110 строят список расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU. Подробности реализации этого этапа можно найти в описании этапа S320 в варианте осуществления изобретения, показанном на фиг.3, и они не будут дублироваться здесь.
[256] На этапе Т120 определяют информацию о координатах целевой согласующейся CU, соответствующей каждому номеру режима ETMVP в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов.
[257] Например, когда список расширенных временных кандидатов строится способом, описанным на этапе Т110, устройство кодирования может пройти номера режимов ETMVP в списке расширенных временных кандидатов.
[258] Для каждого возможного номера режима ETMVP устройство кодирования может определить информацию о координатах соответствующей целевой согласующейся CU в соответствии с возможным номером режима ETMVP. Подробности реализации этого этапа можно найти в описании этапа S330 в варианте осуществления изобретения, показанном на фиг.3, и они не будут дублироваться здесь.
[259] На этапе Т130 информацию о движении целевой согласующейся CU определяют в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU включает информацию о движении каждого подблока в целевой согласующейся CU, и информацию о движении подблока в соответствующей позиции в текущей CU определяют в соответствии с информацией о движении каждого подблока в целевой согласующейся CU. Подробности реализации этого этапа можно найти в описании этапа S340 в варианте осуществления изобретения, показанном на фиг.3, и они не будут дублироваться здесь.
[260] На этапе Т140 выполняют МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU. Подробности реализации этого этапа можно найти в описании этапа S350 в варианте осуществления изобретения, показанном на фиг.6, и они не будут дублироваться здесь.
[261] На этапе Т150 вычисляют стоимость скорости-искажения для каждого режима ETMVP, стоимость скорости-искажения сравнивают с соответствующими значениями стоимости скорости-искажения других режимов предсказания для выбора режима предсказания, соответствующего наименьшей стоимости скорости-искажения, и флаг режима ETMVP и значение индекса режима ETMVP для выбранных режимов предсказания записывают в битовый поток для передачи на устройство декодирования.
[262] Например, устройство кодирования может определить режим предсказания с наименьшей стоимостью скорости-искажения на основе решения RDO и определить значение флага режима ETMVP и значение индекса режима ETMVP в соответствии с режимом предсказания, соответствующим наименьшей стоимости скорости-искажения, и записать ее в битовый поток для передачи на устройство декодирования.
[263] Например, реализация процесса кодирования и реализация процесса декодирования приведенных выше вариантов осуществления изобретения могут ссылаться друг на друга.
[264] Для того чтобы специалисты в данной области техники могли лучше понять технические решения, обеспечиваемые вариантами осуществления настоящей заявки, ниже приводится описание технических решений, обеспечиваемых вариантами осуществления настоящей заявки, в сочетании с конкретными примерами.
Вариант 1 осуществления изобретения
[265] Варианты осуществления настоящей заявки обеспечивают усовершенствованный способ предсказания временной информации о движении, посредством которого информация о движении совмещенной CU в совмещенном кадре текущей CU используется для определения согласующейся CU, а найденная согласующаяся CU смещается рядом способов, например вверх, вниз, влево, вправо и т.д., что приводит к множеству возможных временных режимов, что в определенной степени позволяет избежать проблемы неточно найденных согласующихся CU из-за неточной информации о движении окружающей CU.
[266] Основной процесс реализации вариантов осуществления настоящей заявки может включать следующие 6 частей:
[267] Часть 1, кодирование/анализ значения флага режима расширенного временного предсказания вектора движения (ETMVP) и значения индекса режима ETMVP в соответствии с условиями кодирования/декодирования текущей CU;
[268] Часть 2, определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU;
[269] Часть 3, построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
[270] Часть 4, получение соответствующего режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей режиму ETMVP;
[271] Часть 5, получение информации о движении каждого подблока в текущей CU в соответствии с информацией о координатах целевой согласующейся CU;
[272] Часть 6, выполнение МС для соответствующего подблока в текущей CU на основе информации о движении каждого подблока в текущей CU.
[273] Например, порядок указанных выше шести частей может быть скорректирован.
Вариант 2 осуществления изобретения
[274] Способ кодирования, который обеспечивают варианты осуществления настоящей заявки, может включать следующие этапы:
[275] Этап 1: определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU;
[276] Этап 2: построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
[277] Этап 3, определение информации о координатах целевой согласующейся CU, соответствующей каждому расширенному временному кандидату в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов;
[278] Этап 4, определение информации о движении каждого подблока в текущей CU в соответствии с информацией о движении, соответствующей информации о координатах целевой согласующейся CU;
[279] Этап 5, выполнение МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU.
[280] Этап 6, вычисление стоимости скорости-искажения для каждого режима ETMVP, сравнение стоимости скорости-искажения с соответствующими значениями стоимости скорости-искажения других режимов предсказания для выбора режима предсказания, соответствующего наименьшей стоимости скорости-искажения; и запись флага режима ETMVP и значения индекса режима ETMVP для выбранных режимов предсказания в битовый поток для передачи на устройство декодирования. Вариант 3 осуществления изобретения
[281] Способ декодирования, который обеспечивают варианты осуществления настоящей заявки, может включать следующие этапы:
[282] Этап 1, получение значения флага режима ETMVP и значения индекса режима ETMVP для текущей CU; когда значение флага режима ETMVP является первым значением, выполняют этапы 2 6.
[283] Этап 2, определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU;
[284] Этап 3: построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
[285] Этап 4, получение соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии с полученным значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP;
[286] Этап 5: определение информации о движении каждого подблока в текущей CU в соответствии с информацией о движении, соответствующей информации о координатах целевой согласующейся CU;
[287] Этап 6, выполнение МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU.
[288] В сочетании с вариантами осуществления изобретения части основного процесса вариантов осуществления изобретения (т.е. части 1 ~ части 6) описаны ниже.
[289] Часть 1, кодирование/анализ значения флага режима ETMVP и значения индекса режима ETMVP
[290] Например, анализ значения флага режима ETMVP и значения индекса режима ETMVP может включать: 1) анализ значения флага режима ETMVP (может быть записан как etmvpflag); 2) анализ значения индекса режима ETMVP (может быть записан как cu etmvpcand index).
Вариант 4 осуществления изобретения
[291] Если текущая CU удовлетворяет условию 1 анализа (т.е. первому условию анализа), значение флага режима ETMVP анализируют из битового потока, в противном случае значение флага режима ETMVP равно 0 (т.е. второе значение равно 0).
[292] Например, текущая CU удовлетворяет условию 1 анализа, которое может относиться к вариантам 5-10 осуществления изобретения по отдельности.
Вариант 5 осуществления изобретения
[293] Текущая CU удовлетворяет условию 1 анализа, которое включает: режим предсказания текущей CU представляет собой режим пропуска или прямой режим. Вариант 6 осуществления изобретения
[294] Текущая CU удовлетворяет условию 1 анализа, которое включает: размер текущей CU удовлетворяет одному из следующих ограничений (т.е. заранее заданным ограничениям размера): текущая CU имеет ширину и высоту, которые больше или равны N0. Например, N0 равно 8.
Вариант 7 осуществления изобретения
[295] Текущая CU удовлетворяет условию 1 анализа, которое включает: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает способы ETMVP.
Вариант 8 осуществления изобретения
[296] Текущая CU удовлетворяет условию 1 анализа, которое включает: текущая CU удовлетворяет условию для использования AWP или условию для использования UMVE.
[297] Например, условие для использования AWP может включать: согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает способы AWP; текущая CU имеет ширину и высоту, которые больше или равны N1, но меньше или равны N2; типом текущего кадра изображения является В-изображение.
[298] Например, N1=8. Например, N2=64.
[299] Например, условие для использования UMVE может включать: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает способы UMVE.
Вариант 9 осуществления изобретения
[300] Текущая CU удовлетворяет условию 1 анализа, которое включает:
[301] режим предсказания текущей CU представляет собой режим пропуска или прямой режим;
[302] текущая CU имеет размер, удовлетворяющий следующему заданному ограничению размера;
[303] текущая CU имеет ширину и высоту, которые больше или равны 8. Например, N0=8.
[304] в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает использовать способы ETMVP. Вариант 10 осуществления изобретения
[305] Текущая CU удовлетворяет условию 1 анализа, которое включает:
[306] режим предсказания текущей CU представляет собой режим пропуска или прямой режим;
[307] текущая CU имеет размер, удовлетворяющий следующему заданному ограничению размера;
[308] текущая CU имеет ширину и высоту, которые больше или равны 8. Например, N0=8.
[309] в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает использовать способы ETMVP.
[310] текущая CU удовлетворяет условию для использования AWP или условию для использования UMVE.
[311] Например, условием использования AWP может быть:
[312] в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает использовать способы AWP;
[313] текущая CU имеет ширину и высоту, которые больше или равны N1, но меньше или равны N2;
[314] типом текущего кадра изображения является В-изображение;
[315] Например, N1=8. Например, N2=64.
[316] Например, условие для использования UMVE может включать: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает способы UMVE.
[317] Следует отметить, что в вариантах осуществления настоящей заявки то, что текущая CU удовлетворяет условию 1 анализа, не ограничивается ситуацией, описанной выше в вариантах 5-10 осуществления изобретения, упомянутых выше, и также может включать комбинацию любых двух вариантов осуществления изобретения из вариантов 5-8 осуществления изобретения и комбинацию любых трех вариантов осуществления (комбинация вариантов 5-7 осуществления изобретения представляет собой вариант 9 осуществления изобретения).
Вариант 11 осуществления изобретения
[318] Если текущая CU удовлетворяет условию 1 анализа, значение флага режима ETMVP анализируют из битового потока; в противном случае значение флага режима ETMVP равно 0.
[319] Например, флаг режима ETMVP кодируется контекстно-ориентированным адаптивным двоичным арифметическим кодированием (САВАС).
Вариант 12 осуществления изобретения
[320] Если текущая CU удовлетворяет условию 1 анализа, значение флага режима ETMVP анализируют из битового потока; в противном случае значение флага режима ETMVP равно 0.
[321] Например, конкретная ситуация, когда текущая CU удовлетворяет условию 1 анализа, может относиться к соответствующему описанию приведенных выше вариантов осуществления изобретения, таких как любой из вариантов 5-10 осуществления изобретения.
[322] Например, флаг режима ETMVP кодируется САВАС с помощью контекстной модели.
Вариант 13 осуществления изобретения
[323] Если текущая CU удовлетворяет условию 1 анализа, значение флага режима ETMVP анализируют из битового потока; в противном случае значение флага режима ETMVP равно 0.
[324] Например, конкретная ситуация, когда текущая CU удовлетворяет условию 1 анализа, может относиться к соответствующему описанию приведенных выше вариантов осуществления изобретения, таких как любой из вариантов 5-10 осуществления изобретения.
[325] Например, флаг режима ETMVP кодируется САВАС с несколькими контекстными моделями.
[326] Например, эти несколько контекстных моделей могут быть определены на основе размера текущей CU.
[327] Например, размер текущей CU может быть выражен, не ограничиваясь этим, как: ширина и/или высота текущей CU, максимальное или минимальное значение ширины и высоты текущей CU или произведение ширины и высоты текущей CU.
Вариант 14 осуществления изобретения
[328] Если текущая CU удовлетворяет условию 2 анализа (то есть второму условию анализа), значение индекса режима ETMVP анализируют из битового потока; в противном случае значение индекса режима ETMVP равно 0 (т.е. третье значение равно 0).
[329] Например, конкретная ситуация, когда текущая CU удовлетворяет условию анализа, может относиться к вариантам 15-17 осуществления изобретения по отдельности.
Вариант 15 осуществления изобретения
[330] Текущая CU удовлетворяет условию 2 анализа, которое включает: режим предсказания текущей CU представляет собой режим пропуска или прямой режим. Вариант 16 осуществления изобретения
[331] Текущая CU удовлетворяет условию 2 анализа, которое включает: в соответствии с высокоуровневым синтаксисом уровня последовательности текущая CU разрешает режим ETMVP.
Вариант 17 осуществления изобретения
[332] Текущая CU удовлетворяет условию 2 анализа, которое включает: [333] режим предсказания текущей CU представляет собой режим пропуска или прямой режим;
[334] текущая CU разрешает режим ETMVP.
[335] Например, описание синтаксиса значения индекса режима ETMVP может быть следующим:

Вариант 18 осуществления изобретения
[336] Если текущая CU удовлетворяет условию 2 анализа (то есть второму условию анализа), значение индекса режима ETMVP анализируют из битового потока; в противном случае значение индекса режима ETMVP равно 0 (т.е. третье значение равно 0).
[337] Например, конкретная ситуация, когда текущая CU удовлетворяет условию 2 анализа, может относиться к описанию любого из вариантов 15-17 осуществления изобретения.
[338] Например, осуществляют обратную бинаризацию значения индекса режима ETMVP на основе усеченного унарного значения с максимальным значением 4, при этом усеченное унарное значение использует строку бинов до 4 бинов, и каждый из бинов использует отдельную контекстную модель, так что всего имеется четыре контекстных модели. Например, реализацию обратной бинаризации значения индекса режима ETMVP можно увидеть в таблице 1.
[339] Часть 2, определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU
[340] Например, определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU может включать: определение временного опорного изображения, где расположена согласующаяся CU, в соответствии с типом текущего кадра изображения; определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU.
[341] Например, во временном опорном изображении опорный временной блок, ширина и высота которого соответственно такие же, как ширина и высота текущей CU, определяют как согласующуюся CU текущей CU.
[342] Например, если типом текущего кадра изображения является Р-изображение, временное опорное изображение находится в списке 0 опорных изображений, и его значение индекса опорного кадра равно 0; если типом текущего кадра изображения является В-изображение, временное опорное изображение находится в списке 1 опорных изображений, и его значение индекса опорного кадра равно 0.
[343] Например, информация о координатах текущей CU может быть координатой левого верхнего угла текущей CU на изображении (текущем изображении); информация о координатах согласующейся CU может быть координатой левого верхнего угла согласующейся CU во временном опорном изображении.
[344] Например, определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU может включать: определение информации о координатах начальной согласующейся CU на основе левой верхней координаты текущей LCU на изображении, размера LCU, размера текущего изображения, размера текущей CU и левой верхней координаты текущей CU на изображении.
[345] Например, на основе левой верхней координаты текущей LCU в изображении, размера LCU, размера текущего изображения, размера текущей CU и левой верхней координаты текущей CU в изображении определение информации о координатах начальной согласующейся CU включает: определение абсциссы начальной согласующейся CU в соответствии с абсциссой левого верхнего угла текущей LCU на изображении, размером LCU, шириной текущей CU, шириной текущего изображения и абсциссой левого верхнего угла текущей CU на изображении; определение ординаты начальной согласующейся CU в соответствии с ординатой левого верхнего угла текущей LCU на изображении, размером LCU, высотой текущей CU, высотой текущего изображения и ординатой левого верхнего угла текущей CU на изображении.
[346] Например, конкретная реализация определения информации о координатах начальной согласующейся CU для текущей CU в соответствии с информацией о координатах текущей CU может относиться к описанию любого из вариантов 19-21 осуществления изобретения.
Вариант 19 осуществления изобретения
[347] Если (Xpos, Ypos) - координата левого верхнего угла текущей CU на изображении, (х ctb_pos, у ctb_pos) - координата левого верхнего угла текущей LCU на изображении, cuwidth и cuheight - ширина и высота текущей CU, a horizontalsize и verticalsize - ширина и высота текущего изображения, lcusize - размер LCU, координаты согласующейся CU (Мх,Му) определяют следующим образом:

Вариант 20 осуществления изобретения
[348] Если (Xpos, Ypos) - координата левого верхнего угла текущей CU на изображении, (x_ctb_pos, y_ctb_pos) - координата левого верхнего угла текущей LCU на изображении, cuwidth и cuheight - ширина и высота текущей CU, a horizontalsize и vertical size - ширина и высота текущего изображения, leu_size - размер LCU, координаты согласующейся CU (Мх,Му) определяют следующим образом:


Вариант 21 осуществления изобретения
[349] Если (Xpos, Ypos) - координата левого верхнего угла текущей CU на изображении, (х ctb_pos, у ctb_pos) - координата левого верхнего угла текущей LCU на изображении, cu width и cu height - ширина и высота текущей CU, a horizontal size и verticalsize - ширина и высота текущего изображения, lcusize - размер LCU, координаты согласующейся CU (Мх,Му) определяют следующим образом:

Вариант 22 осуществления изобретения
[350] Если (Xpos, Ypos) является координатой левого верхнего угла текущей CU на изображении, координаты согласующейся CU (Мх, My) могут быть определены следующим образом:
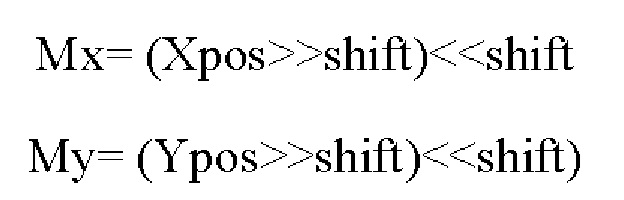
[351] Например, сдвиг связан с размером подблока, для подблока N*N N=1<<shift. Например, если размер подблока 8*8, shift=3.
[352] Часть 3, построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU
[353] Например, если (Мх,Му) - координата левого верхнего угла начальной согласующейся CU во временном опорном изображении, А1-А4, В1-В4, С1-С4 - это соседние блоки 4*4 вокруг начальной согласующейся CU во временном опорном изображении, а схему можно увидеть на фиг.4.
Вариант 23 осуществления изобретения
[354] 23.0, инициализация длины списка расширенных временных кандидатов в 0. Например, начальная длина списка расширенных временных кандидатов равна 0.
[355] 23.1, добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[356] 23.2, если согласующаяся CU, где находится (Мх, My), не выходит за нижнюю границу LCU или изображения, на котором находится согласующаяся CU, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[357] 23.3, если согласующаяся CU, где находится (Мх, My), не выходит за правую границу LCU или изображения, на котором находится согласующаяся CU, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[358] 23.4, если согласующаяся CU, где находится (Мх, My), не выходит за верхнюю границу LCU или изображения, на котором находится согласующаяся CU, а информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, добавление режима ETMVP с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[359] 23.5, если согласующаяся CU, где находится (Мх, My), не выходит за левую границу LCU или изображения, на котором расположена согласующаяся CU, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[360] 23.6, когда длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле:
[361] 23.6.1 добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1;
[362] 23.6.2, если длина списка расширенных временных кандидатов равна 5, завершение процесса построения списка.
[363] Например, логика реализации может быть следующей:
[364] 1) инициализация EtmvpCandArray[i] в 0, i=0~4; инициализация длины в 0;
[365] 2) во-первых, EtmvpCandArray[0]=0, длина увеличивается на 1;
[366] 3) если согласующаяся CU, где находится (Мх, My), не выходит за нижнюю границу LCU или кадра, где находится согласующаяся CU, а информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, тогда EtmvpCandArray[length]=1, длина увеличивается на 1;
[367] 4) если согласующаяся CU, где находится (Мх, My), не выходит за правую границу LCU или кадра, где находится согласующаяся CU, а информация о движении позиции А1 отличается от информации о движении позиции FJ2, или информация о движении позиции A3 отличается от информации о движении позиции В4, тогда EtmvpCand Array [length]=2, длина увеличивается на 1;
[368] 5) если согласующаяся CU, где находится (Мх, My), не выходит за верхнюю границу LCU или кадра, где находится согласующаяся CU, а информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, тогда Etm vpCand Array [length]=3, длина увеличивается на 1;
[369] 6) если согласующаяся CU, где находится (Мх, My), не выходит за левую границу LCU или изображения, где расположена согласующаяся CU, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, тогда EtmvpCandArray[length]=4, длина увеличивается на 1;
[370] 7) если длина меньше 5, выполняют в цикле следующие операции:
[371] 7.1) EtmvpCandArray[length]=EtmvpCandArray[length-l], длина увеличивается на 1.
[372] 7.2) если длина равна 5, завершение процесса построения списка.
Вариант 24 осуществления изобретения
[373] 24.0, инициализация длины списка расширенных временных кандидатов в 0. Например, начальная длина списка расширенных временных кандидатов равна 0.
[374] 24.1, добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[375] 24.2, если согласующаяся CU, где находится (Мх, My), не выходит за нижнюю границу LCU или изображения, где находится согласующаяся CU, а информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[376] 24.3, если согласующаяся CU, где находится (Мх, My), не выходит за правую границу LCU или изображения, где расположена согласующаяся CU, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[377] 24.4, если согласующаяся CU, где находится (Мх, My), не выходит за верхнюю границу LCU или изображения, где находится согласующаяся CU, а информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление режима ETMVP с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[378] 24.5, если согласующаяся CU, где находится (Мх, My), не выходит за левую границу LCU или изображения, где расположена согласующаяся CU, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, то добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
Вариант 25 осуществления изобретения
[379] 25.0, инициализация длины списка расширенных временных кандидатов в 0. Например, начальная длина списка расширенных временных кандидатов равна 0.
[380] 25.1, добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1. Например, начальная длина списка расширенных временных кандидатов равна 0.
[381] 25.2, если согласующаяся CU, где находится (Мх, Му+8), не выходит за нижнюю границу LCU или изображения, где находится согласующаяся CU, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, добавление режима ETMVP с номером 1 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на 1;
[382] 25.3, если согласующаяся CU, где находится (Мх+8, My), не выходит за правую границу LCU или изображения, где находится согласующаяся CU, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, добавление режима ETMVP с номером 2 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на 1;
[383] 25.4, если согласующаяся CU, где находится (Мх, Му-8), не выходит за верхнюю границу LCU или кадра, где находится согласующаяся CU, а информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, добавление режима ETMVP с номером 3 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на 1;
[384] 25.5, если согласующаяся CU, где находится (Мх-8, My), не выходит за левую границу LCU или изображения, где расположена согласующаяся CU, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, добавление режима ETMVP с номером 4 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на 1;
[385] 25.6, если длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле:
[386] 25.6.1 добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1;
[387] 25.6.2, если длина списка расширенных временных кандидатов равна 5, завершение процесса построения списка.
Вариант 26 осуществления изобретения
[388] 26.0, инициализация длины списка расширенных временных кандидатов в 0.
[389] 26.1, добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1. Например, начальная длина списка расширенных временных кандидатов равна 0.
[390] 26.2, если согласующаяся CU, где находится (Мх, Му+8), не выходит за нижнюю границу LCU или изображения, где находится согласующаяся CU, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, добавление режима ETMVP с номером 1 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на 1;
[391] 26.3, если согласующаяся CU, где находится (Мх+8, My), не выходит за правую границу LCU или изображения, где расположена согласующаяся CU, а информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, добавление режима ETMVP с номером 2 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на 1;
[392] 26.4, если согласующаяся CU, где находится (Мх, Му-8), не выходит за верхнюю границу LCU или кадра, где находится согласующаяся CU, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, добавление режима ETMVP с номером 3 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на
[393] 26.5, если согласующаяся CU, где находится (Мх-8, My), не выходит за левую границу LCU или изображения, где расположена согласующаяся CU, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, добавление режима ETMVP с номером 4 в список расширенных кандидатов во временной области и увеличение длины списка расширенных временных кандидатов на 1;
Вариант 27 осуществления изобретения
[394] 27.0, инициализация длины списка расширенных временных кандидатов в 0. Например, начальная длина списка расширенных временных кандидатов равна 0.
[395] 27.1, добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[396] 27.2, если Му+8 меньше или равно меньшим значениям y_ctb_pos+lcu_size-cu_height и verticalsize-cuheight, а информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[397] 27.3, если Мх+8 меньше или равно меньшим значениям х ctbj»os+lcu size-cu width и horizontal size-cu width, а информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[398] 27.4, если Му-8 больше или равно у ctb_pos, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление режима ETMVP с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[399] 27.5, если Мх-8 больше или равно х ctb_pos, а информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, то добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1.
[400] 27.6, если длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле:
[401] 27.6.1 добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1;
[402] 27.6.2, если длина списка расширенных временных кандидатов равна 5, завершение процесса построения списка.
Вариант 28 осуществления изобретения
[403] 28.0, инициализация длины списка расширенных временных кандидатов в 0. Например, начальная длина списка расширенных временных кандидатов равна 0.
[404] 28.1, добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[405] 28.2, если Му+8 меньше или равно меньшим значениям у ctb j»os+lcu size-cu height и vertical size-cu height, а информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[406] 28.3, если Мх+8 меньше или равно меньшим значениям x_ctb_pos+lcu_size-cu_width и horizontalsize-cuwidth, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[407] 28.4, если Му-8 больше или равно y_ctb_pos, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление режима ETMVP с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[408] 28.5, если Мх-8 больше или равно x_ctb_pos, а информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, то добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1.
[409] Часть 4, получение соответствующего режима ETMVP из списка расширенных временных режимов-кандидатов в соответствии со значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей режиму ETMVP.
[410] Например, получают соответствующий номер режима ETMVP (может быть записан как etmvpmode) из списка расширенных временных кандидатов в соответствии с полученным значением индекса режима ETMVP (может быть записан как EtmvpCandlndex) и, согласно номеру режима ETMVP etmvp mode, координаты целевой согласующейся CU определяют как (Рх, Ру). Например,

Вариант 29 осуществления изобретения
[411] В соответствии с номером режима ETMVP координаты целевой согласующейся CU (Рх, Ру) определяют путем поиска в таблице. Например, соответствие между etmvpmode и Рх, Ру можно увидеть в таблице 2:
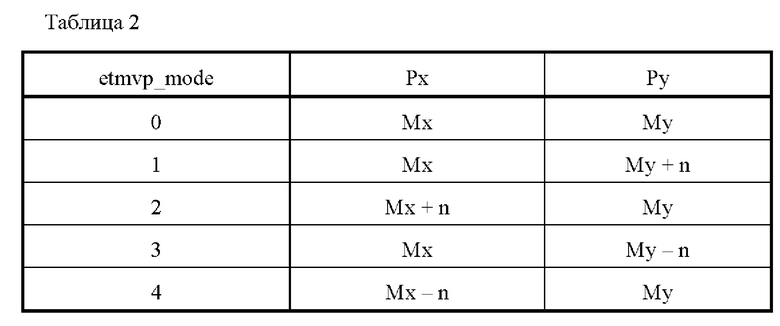
[412] Например, п может быть равно 8. Вариант 30 осуществления изобретения
[413] Если номер режима ETMVP равен 0, то целевая согласующаяся CU является начальной согласующейся CU, то есть Рх равно Мх, Ру равно My;
[414] Если номер режима ETMVP равен 1, то целевая согласующаяся CU является временным опорным блоком, полученным посредством общего смещения вниз начальной согласующейся CU на п пикселей, то есть Рх равно Мх, Ру равно Му+п;
[415] Если номер режима ETMVP равен 2, то целевая согласующаяся CU представляет собой временной опорный блок, полученный путем полного смещения вправо начальной согласующейся CU на п пикселей, то есть Рх равно Мх+n, Ру равно My;
[416] Если номер режима ETMVP равен 3, то целевая согласующаяся CU представляет собой временной опорный блок, полученный посредством общего смещения вверх начальной согласующейся CU на п пикселей, то есть Рх равно Мх, Ру равно Му-п.
[417] Если номер режима ETMVP равен 4, то целевая согласующаяся CU представляет собой временной опорный блок, полученный общим смещением влево начальной согласующейся CU на п пикселей, то есть Рх равно Мх-n, Ру равно My.
[418] Например, п может быть равно 8.
[419] Часть 5, получение информации о движении каждого подблока в текущей CU в соответствии с информацией о координатах целевой согласующейся CU
[420] Например, информация о движении целевой согласующейся CU может быть определена в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU включает информацию о движении каждого подблока в целевой согласующейся CU, и информацию о движении подблока в соответствующей позиции в текущей CU определяют в соответствии с информацией о движении каждого подблока в целевой согласующейся CU.
[421] Например, первый окружающий блок текущей CU можно увидеть на фиг.5. Как видно на фиг.5, Е - текущая CU, и первый окружающий блок текущей CU может включать любой из А, В, С, D, F и G.
[422] Например, CU включает по меньшей мере один подблок, ширина каждого подблока не превышает ширины текущей CU, а высота каждого подблока не превышает высоты текущей CU, например, каждый подблок представляет собой блок 8*8.
[423] В варианте осуществления изобретения первый окружающий блок текущей CU обозначен буквой F на фиг.5.
[424] Например, для любого подблока в целевой согласующейся CU (таком как подблок 8*8) координаты левого верхнего угла каждого подблока 8*8 равны (Px+(i<<<3), Ру+(j<<3)), i - значение горизонтального индекса подблока, j - значение вертикального индекса подблока, i=0~(cu_width>>3) -1, j=0~(c_height>>3) -1.
[425] Например, для любого подблока в текущей CU (такого как подблок 8*8) информация о движении каждого подблока 8*8 представляет собой Mori on Array [i][j], i - значение горизонтального индекса подблока, j - значение вертикального индекса подблока, i=0~(cu_width >> 3)-1, j=0~(cu_height >> 3)-1.
Вариант 31 осуществления изобретения
[426] Для любого подблока в целевой согласующейся CU:
[427] 31.1, если доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении для подблока, информацию о движении в прямом направлении и информацию о движении в обратном направлении для подблока масштабируют соответственно к первому кадру списка 0 и первому кадру списка 1, а масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU;
[428] 31.2, если информация о движении в прямом направлении для подблока доступна, но информация о движении в обратном направлении недоступна, информацию о движении в прямом направлении для подблока масштабируют с указанием на первый кадр List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[429] 31.3, если информация о движении в обратном направлении для подблока доступна, но информация о движении в прямом направлении недоступна, информацию о движении в обратном направлении для подблока масштабируют к первому кадру списка 1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[430] 31.4, если для подблока недоступны ни информация о движении в прямом направлении, ни информация о движении в обратном направлении, тогда используют информацию о движении по умолчанию.
[431] Например, информация о движении по умолчанию не может быть ограничена в вариантах осуществления настоящей заявки. Например, информация о движении по умолчанию может быть нулевой информацией о движении или информацией о движении, определенной из окружающих блоков текущей CU.
Вариант 32 осуществления изобретения
[432] Для любого подблока в целевой согласующейся CU:
[433] 32.1, если информация о движении в прямом направлении для подблока доступна, то информацию о движении в прямом направлении для подблока масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[434] 32.2, если информация о движении в прямом направлении недоступна, то она должна быть заполнена информацией о движении по умолчанию.
[435] Например, информация о движении по умолчанию не может быть ограничена в вариантах осуществления настоящей заявки. Например, информация о движении по умолчанию может быть нулевой информацией о движении или информацией о движении, определенной из окружающих блоков текущей CU.
Вариант 33 осуществления изобретения
[436] Для любого подблока в целевой согласующейся CU:
[437] 33.1, когда типом текущего кадра изображения является Р-изображение:
[438] 33.1.1, если информация о движении в прямом направлении для подблока доступна, то информацию о движении в прямом направлении для подблока масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[439] 33.1.2, если информация о движении в прямом направлении недоступна, то она должна быть заполнена информацией о движении по умолчанию.
[440] Например, информация о движении по умолчанию не может быть ограничена в вариантах осуществления настоящей заявки. Например, информация о движении по умолчанию может быть нулевой информацией о движении или информацией о движении, определенной из окружающих блоков текущей CU.
[441] 33.2, когда типом текущего кадра изображения является В-изображение:
[442] 33.2.1, если доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении для подблока, информацию о движении в прямом направлении и информацию о движении в обратном направлении для подблока масштабируют соответственно к первому кадру списка 0 и первому кадру списка 1, а масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU;
[443] 33.2.2, если информация о движении в прямом направлении для подблока доступна, но информация о движении в обратном направлении недоступна, информацию о движении в прямом направлении для подблока масштабируют с указанием на первый кадр List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[444] 33.2.3, если информация о движении в обратном направлении для подблока доступна, но информация о движении в прямом направлении недоступна, информацию о движении в обратном направлении для подблока масштабируют к первому кадру списка 1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[445] 33.2.4, если для подблока недоступна ни информация о движении в прямом направлении, ни информация о движении в обратном направлении, то она должен быть заполнена информацией о движении по умолчанию.
[446] Например, информация о движении по умолчанию не может быть ограничена в вариантах осуществления настоящей заявки. Например, информация о движении по умолчанию может быть нулевой информацией о движении или информацией о движении, определенной из окружающих блоков текущей CU.
Вариант 34 осуществления изобретения
[447] Для любого подблока в целевой согласующейся CU:
[448] 34.1, если доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении для подблока, информацию о движении в прямом направлении и информацию о движении в обратном направлении подблока масштабируют соответственно к первому кадру списка 0 и первому кадру списка 1, а масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU;
[449] 34.2, если информация о движении в прямом направлении для подблока доступна, но информация о движении в обратном направлении недоступна, информацию о движении в прямом направлении для подблока масштабируют с указанием на первый кадр List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[450] 34.3, если информация о движении в обратном направлении для подблока доступна, но информация о движении в прямом направлении недоступна, информацию о движении в обратном направлении для подблока масштабируют к первому кадру списка 1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[451] 34.4, если для подблока недоступна ни информация о движении в прямом направлении, ни информация о движении в обратном направлении, то:
[452] 34.4.1, когда доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении и информацию о движении в обратном направлении первого окружающего блока масштабируют к первому кадру List0 и первому кадру списка List1 соответственно, и масштабированную информацию о движении в прямом направлении и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU соответственно;
[453] 34.4.2, когда информация о движении в прямом направлении первого окружающего блока доступна, но его информация о движении в обратном направлении недоступна, его информацию о движении в прямом направлении масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[454] 34.4.3, когда информация о движении в обратном направлении первого окружающего блока доступна, но его информация о движении в прямом направлении недоступна, его информацию о движении в обратном направлении масштабируют к первому кадру списка List1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[455] 34.4.4, когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU;
Вариант 35 осуществления изобретения
[456] Для любого подблока в целевой согласующейся CU:
[457] 35.1, если информация о движении в прямом направлении для подблока доступна, то информацию о движении в прямом направлении для подблока масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[458] 35.2, если информация о движении в прямом направлении для подблока недоступна, то:
[459] 35.2.1, когда доступна информация о движении в прямом направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении первого окружающего блока масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[460] 35.2.2, когда информация о движении в прямом направлении первого окружающего блока недоступна, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU.
Вариант 36 осуществления изобретения
[461] Для любого подблока в целевой согласующейся CU:
[462] 36.1, когда типом текущего кадра изображения является Р-изображение:
[463] 36.1.1, если информация о движении в прямом направлении для подблока доступна, то информацию о движении в прямом направлении подблока масштабируют к первому кадру List0, и масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[464] 36.1.2, если информация о движении в прямом направлении подблока недоступна, то:
[465] 36.1.2.1, когда информация о движении в прямом направлении первого окружающего блока текущей CU доступна, информацию о движении в прямом направлении первого окружающего блока масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[466] 36.1.2.2, когда информация о движении в прямом направлении первого окружающего блока недоступна, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU.
[467] 36.2, когда типом текущего кадра изображения является В-изображение:
[468] 36.2.1, если доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении для подблока, информацию о движении в прямом направлении и информацию о движении в обратном направлении подблока масштабируют соответственно к первому кадру List0 и первому кадру List1, а масштабированную информацию о движении в прямом направлении и информацию о движении в обратном направлении соответственно предоставляют подблоку в соответствующей позиции в текущей CU;
[469] 36.2.2, если информация о движении в прямом направлении для подблока доступна, но информация о движении в обратном направлении недоступна, информацию о движении в прямом направлении для подблока масштабируют с указанием на первый кадр List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[470] 36.2.3, если информация о движении в обратном направлении для подблока доступна, но информация о движении в прямом направлении недоступна, информацию о движении в обратном направлении подблока масштабируют к первому кадру списка 1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[471] 36.2.4, если для подблока недоступны ни информация о движении в прямом направлении, ни информация о движении в обратном направлении, то:
[472] 36.2.4.1, когда доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении первого окружающего блока текущей CU, информацию о движении в прямом направлении и информацию о движении в обратном направлении первого окружающего блока масштабируют к первому кадру List0 и первому кадру списка List1 соответственно, и масштабированную информацию о движении в прямом направлении и масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU соответственно;
[473] 36.2.4.2, когда информация о движении в прямом направлении первого окружающего блока доступна, но его информация о движении в обратном направлении недоступна, его информацию о движении в прямом направлении масштабируют к первому кадру List0, а масштабированную информацию о движении в прямом направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[474] 36.2.4.3, когда информация о движении в обратном направлении первого окружающего блока доступна, но его информация о движении в прямом направлении недоступна, его информацию о движении в обратном направлении масштабируют к первому кадру списка 1, а масштабированную информацию о движении в обратном направлении предоставляют подблоку в соответствующей позиции в текущей CU;
[475] 36.2.4.4, когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевую информацию о движении предоставляют подблоку в соответствующей позиции в текущей CU.
[476] Часть 6, выполнение МС для соответствующего подблока в текущей CU на основе информации о движении каждого подблока в текущей CU
[477] Например, CU включает по меньшей мере один подблок, ширина каждого подблока не превышает ширины текущей CU, а высота каждого подблока не превышает высоты текущей CU.
[478] Например, каждый подблок представляет собой блок 8*8.
[479] Например, для любого подблока в текущей CU (такого как подблок 8*8) информация о движении каждого подблока 8*8 представляет собой Moti on Array [i][j], i - значение горизонтального индекса подблока, j - значение вертикального индекса подблока, i=0~(cu_width >> 3)-1, j=0~(cu_height >> 3)-1.
Вариант 37 осуществления изобретения
[480] Для любого подблока в текущей CU на основе информации о движении текущего подблока выполняют компенсацию движения (МС) для текущего подблока, затем получают матрицу отсчетов предсказания текущего подблока. Например, отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
Вариант 38 осуществления изобретения
[481] Для любого подблока текущей CU, если текущий подблок удовлетворяет условиям применения BIO, то на основе информации о движении текущего подблока выполняют МС для текущего подблока, и способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания текущего подблока; в противном случае, на основе информации о движении текущего подблока, выполняют МС для текущего подблока, затем получают матрицу отсчетов предсказания текущего подблока.
[482] Например, отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока. Например, подблок удовлетворяет условиям применения BIO, включающим:
1) согласно высокоуровневому синтаксису уровня последовательности, способы BIO включены;
2) точность MV текущей CU равна 0;
3) подблок использует двунаправленное предсказание;
4) для этого подблока опорный кадр, значение индекса которого равно refIdxL0 в списке 0 опорных изображений, и опорный кадр, значение индекса которого равно refIdxLl в списке 1 опорных изображений, соответственно отображают с обеих сторон текущего кадра.
Вариант 39 осуществления изобретения
[483] Для любого подблока текущей CU DMVR не используют для информации о движении. На основе информации о движении текущего подблока выполняют МС для текущего подблока. Например, отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока, затем получают матрицу отсчетов предсказания текущего подблока.
Вариант 40 осуществления изобретения
[484] Для любого подблока текущей CU DMVR не используют для информации о движении. Если текущий подблок удовлетворяет условиям применения BIO, то на основе информации о движении текущего подблока выполняют МС для текущего подблока и используют способы BIO для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания текущего подблока; в противном случае, на основе информации о движении текущего подблока, выполняют МС для текущего подблока, затем получают матрицу отсчетов предсказания текущего подблока.
[485] Например, отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
[486] Например, подблок удовлетворяет условиям применения BIO, включающим:
1) согласно высокоуровневому синтаксису уровня последовательности, способы BIO включены;
2) точность MV текущей CU равна 0;
3) подблок использует двунаправленное предсказание;
4) для этого подблока опорный кадр, значение индекса которого равно refIdxL0 в списке 0 опорных изображений, и опорный кадр, значение индекса которого равно refIdxLl в списке 1 опорных изображений, соответственно отображают с обеих сторон текущего кадра.
[487] Следует отметить, что приведенные выше варианты осуществления изобретения являются только конкретными примерами способа реализации, обеспечиваемого вариантами осуществления настоящей заявки, а не ограничением объема защиты настоящей заявки. На основе приведенных выше вариантов осуществления изобретения новые варианты осуществления изобретения могут быть получены посредством комбинации, то есть любой комбинации двух или более указанных выше вариантов осуществления изобретения или модификации этих приведенных выше вариантов осуществления изобретения, и все они находятся в пределах сущности изобретения.
[488] Кроме того, приведенные выше варианты осуществления изобретения могут ссылаться друг на друга, и реализации процесса кодирования и декодирования описанных выше вариантов осуществления изобретения могут ссылаться друг на друга.
[489] Выше приведено описание способов, предусмотренных настоящей заявкой. Ниже приводится описание устройств, предусмотренных настоящей заявкой:
[490] На фиг.7 показана структурная схема устройства декодирования в соответствии с вариантами осуществления настоящей заявки, при этом устройство может содержать: блок 710 получения, сконфигурированный для получения значения флага режима ETMVP и значения индекса режима ETMVP для текущей CU; первый блок 720 определения, сконфигурированный для определения информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU, когда значение флага режима ETMVP является первым значением; блок 730 построения, выполненный с возможностью построения списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU; второй блок 740 определения, сконфигурированный для получения соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определения информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP; третий блок 750 определения, сконфигурированный для определения информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определения информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU.
[491] В некоторых вариантах осуществления изобретения блок 710 получения получает значение флага режима ETMVP для текущей CU, что включает: когда текущая CU удовлетворяет первому условию анализа, значение флага режима ETMVP анализируется из битового потока; в противном случае значение флага режима ETMVP определяется как второе значение; при этом, если значение флага режима ETMVP является первым значением, это указывает на то, что текущая CU разрешает режим ETMVP; если значение флага режима ETMVP является вторым значением, это указывает на то, что текущая CU запрещает режим ETMVP.
[492] В некоторых вариантах осуществления изобретения текущая CU удовлетворяет первому условию анализа, что может включать одно или более из следующего: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера; согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает использовать способы ETMVP; текущая CU удовлетворяет условию для использования AWP или условию для использования UMVE.
[493] В некоторых вариантах осуществления изобретения текущая CU удовлетворяет первому условию анализа, что включает: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU имеет размер, удовлетворяющий заранее заданному ограничению размера; текущая CU имеет ширину и высоту, которые больше или равны N0; согласно высокоуровневому синтаксису уровня последовательности текущая CU разрешает использовать способы ETMVP; текущая CU удовлетворяет условию для AWP или условию для использования UMVE.
[494] В некоторых вариантах осуществления изобретения флаг режима ETMVP кодируется посредством САВАС с помощью контекстной модели.
[495] В некоторых вариантах осуществления изобретения блок 710 получения получает значение флага режима ETMVP для текущей CU, что включает: когда текущая CU удовлетворяет второму условию анализа, значение флага режима ETMVP анализируется из битового потока.
[496] В некоторых вариантах осуществления изобретения текущая CU удовлетворяет второму условию анализа, которое может включать одно или более из следующего: режим предсказания текущей CU представляет собой режим пропуска или прямой режим; текущая CU разрешает режим ETMVP.
[497] В некоторых вариантах осуществления изобретения осуществляется обратная бинаризация значения индекса режима ETMVP на основе усеченного унарного значения с максимальным значением 4, при этом усеченное унарное значение использует строку бинов, содержащую до 4 бинов, и каждый из бинов и каждый из символов бинов использует отдельную контекстную модель, так что всего существует четыре контекстных модели.
[498] В некоторых вариантах осуществления изобретения первый блок 720 определения определяет информацию о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU, что включает: определение временного опорного изображения, где расположена согласующаяся CU, в соответствии с типом текущего кадра изображения; определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU; при этом, если типом текущего кадра изображения является Р-изображение, временное опорное изображение находится в списке 0 опорных изображений, и его значение индекса опорного кадра равно 0; если типом текущего кадра изображения является В-изображение, временное опорное изображение находится в списке 1 опорных изображений, и его значение индекса опорного кадра равно 0.
[499] В некоторых вариантах осуществления изобретения первый блок 720 определения определяет информацию о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU, что включает: определение информации о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении.
[500] В некоторых вариантах осуществления изобретения первый блок 720 определения определяет информацию о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении, что включает: определение абсциссы начальной согласующейся CU в соответствии с абсциссой левого верхнего угла текущей LCU на изображении, размером LCU, шириной текущей CU, шириной текущего изображения и абсциссой левого верхнего угла текущей CU на изображении; определение ординаты начальной согласующейся CU в соответствии с ординатой левого верхнего угла текущей LCU на изображении, размером LCU, высотой текущей CU, высотой текущего изображения и ординатой левого верхнего угла текущей CU на изображении.
[501] В некоторых вариантах осуществления изобретения блок 730 построения строит список расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU, что включает: определение по меньшей мере одного номера режима ETMVP в соответствии с информацией о координатах начальной согласующейся CU; построение списка расширенных временных кандидатов согласно по меньшей мере одному номеру режима ETMVP.
[502] В некоторых вариантах осуществления изобретения информация о координатах согласующейся CU представляет собой координату левого верхнего угла согласующейся CU во временном опорном изображении; как упомянуто выше, построение списка расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP может включать:
добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Му+8 меньше или равно меньшим значениям y_ctb_pos+lcu_size-cu_height и verticalsize-cuheight, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Мх+8 меньше или равно меньшим значениям x_ctb_pos+lcu_size-cu_width и horizontal size-cu width, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Му-8 больше или равно у ctbjtos, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление ETMVP режима с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Мх-8 больше или равно х ctbjtos, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции В3, то добавление режима ETMVP с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[503] где (Мх, My) - информация о координатах начальной согласующейся CU, (x_ctb_pos, y_ctb_pos) - координата левого верхнего угла текущей LCU на изображении, lcusize - размер LCU, cuwidth и cuheight - ширина и высота текущей CU соответственно, a horizontal size и vertical size - ширина и высота текущего изображения соответственно;
[504] А1 - это блок 4*4 в левом верхнем углу начальной согласующейся CU, В1 - блок 4*4 непосредственно слева от А1, и С1 - блок 4*4 непосредственно над А1; А2 - блок 4*4 в правом верхнем углу начальной согласующейся CU, В2 - блок 4*4 непосредственно справа от А2, и С2 - блок 4*4 непосредственно над А2; A3 - это блок 4*4 в левом нижнем углу начальной согласующейся CU, В3-блок 4*4 непосредственно слева от A3, и С3-блок 4*4 непосредственно под A3; А4 - это блок 4*4 в правом нижнем углу начальной согласующейся CU, В4 - блок 4*4 непосредственно справа от А4, и С4 - блок 4*4 непосредственно под А4.
[505] В некоторых вариантах осуществления изобретения блок 730 построения строит список расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU, что также включает: когда длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле до тех пор, пока длина списка расширенных временных кандидатов не станет равной 5: добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1.
[506] В некоторых вариантах осуществления изобретения второй блок 740 определения получает соответствующий номер режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определяет информацию о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP, что включает:
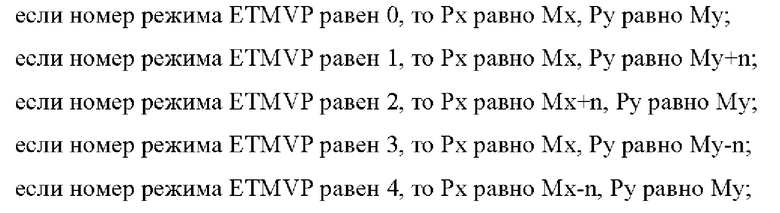
[507] где (Мх, My) - координата левого верхнего угла начальной согласующейся CU, а (Рх, Ру) - координата левого верхнего угла целевой согласующейся CU.
[508] В некоторых вариантах осуществления изобретения третий блок 750 определения определяет информацию о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU, что включает: для любого подблока в целевой согласующейся CU, когда типом текущего кадра изображения является Р-изображение, если информация о движении в прямом направлении для подблока доступна, то информация о движении в прямом направлении для подблока масштабируется к первому кадру List0, и масштабированная информация о движении в прямом направлении предоставляется подблоку в соответствующей позиции в текущей CU.
[509] В некоторых вариантах осуществления изобретения третий блок 750 определения определяет информацию о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU, что включает: для любого подблока в целевой согласующейся CU, когда типом текущего кадра изображения является В-изображение, если информация о движении в прямом направлении и информация о движении в обратном направлении для подблока доступны, информация о движении в прямом направлении и информация о движении в обратном направлении для подблока масштабируются с указанием соответственно на первый кадр List0 и первый кадр List1, и масштабированная информация о движении в прямом направлении и информация о движении в обратном направлении соответственно предоставляются подблоку в соответствующей позиции в текущей CU; если доступна информация о движении в прямом направлении для подблока, но информация о движении в обратном направлении недоступна, информация о движении в прямом направлении для подблока масштабируется с указанием на первый кадр List0, а масштабированная информация о движении в прямом направлении предоставляется подблоку в соответствующей позиции в текущей CU; если информация о движении в обратном направлении для подблока доступна, но информация о движении в прямом направлении недоступна, информация о движении в обратном направлении для подблока масштабируется с указанием на первый кадр List1, и масштабированная информация о движении в обратном направлении предоставляется подблоку в соответствующей позиции в текущей CU.
[510] В некоторых вариантах осуществления изобретения третий блок 750 определения определяет информацию о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU, что включает: для любого подблока в целевой согласующейся CU, когда типом текущего кадра изображения является Р-изображение, если информация о движении в прямом направлении для подблока недоступна, когда информация о движении в прямом направлении первого окружающего блока текущей CU доступна, информация о движении в прямом направлении первого окружающего блока масштабируется к первому кадру List0, и масштабированная информация о движении в прямом направлении предоставляется подблоку в соответствующей позиции в текущей CU; когда информация о движении в прямом направлении первого окружающего блока недоступна, нулевая информация о движении предоставляется подблоку в соответствующей позиции в текущей CU; когда типом текущего кадра изображения является В-изображение, если недоступны ни информация о движении в прямом направлении, ни информация о движении в обратном направлении для подблока, когда доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении первого окружающего блока текущей CU, информация о движении в прямом направлении и информация о движении в обратном направлении первого окружающего блока масштабируются к первому кадру List0 и первому кадру List1 соответственно, а масштабированная информация о движении в прямом направлении и информация о движении в обратном направлении предоставляются подблоку в соответствующей позиции в текущей CU соответственно; когда доступна информация о движении в прямом направлении первого окружающего блока, но его информация о движении в обратном направлении недоступна, его информация о движении в прямом направлении масштабируется к первому кадру List0, а масштабированная информация о движении в прямом направлении предоставляется подблоку в соответствующей позиции в текущей CU; когда информация о движении в обратном направлении первого окружающего блока доступна, но его информация о движении в прямом направлении недоступна, его информация о движении в обратном направлении масштабируется к первому кадру списка List1, а масштабированная информация о движении в обратном направлении предоставляется подблоку в соответствующей позиции в текущей CU; когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевая информация о движении предоставляется подблоку в соответствующей позиции в текущей CU. При этом первый окружающий блок включает любой декодированный соседний блок текущей CU.
[511] В некоторых вариантах осуществления изобретения, как показано на фиг.8, устройство декодирования также содержит: блок 760 компенсации движения (МС), сконфигурированный для выполнения МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU.
[512] В некоторых вариантах осуществления изобретения блок 760 МС выполняет МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU, что включает: для любого подблока текущей CU не использовать DMVR для его информации о движении; если подблок удовлетворяет условиям применения BIO, МС выполняется для подблока в соответствии с информацией о движении подблока, и способы BIO используются для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока; в противном случае выполняют МС для подблока в соответствии с информацией о движении подблока и получают матрицу отсчетов предсказания подблока; при этом отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
[513] В возможном варианте осуществления изобретения упомянутое выше устройство декодирования может включать видеодекодер.
[514] На фиг.9 показана схема аппаратной структуры устройства декодирования, предусмотренная вариантами осуществления настоящей заявки. Устройство декодирования может включать процессор 901 и машиночитаемый носитель 902 данных, на котором хранятся машиночитаемые инструкции. Процессор 901 и машиночитаемый носитель 902 данных могут взаимодействовать через системную шину 903. Кроме того, путем считывания и выполнения машиночитаемых инструкций, соответствующих логике управления декодированием и хранимых на машиночитаемом носителе 902 данных, процессор 901 может выполнять описанный выше способ декодирования.
[515] Машиночитаемый носитель 902 данных, упомянутый здесь, может быть любым электронным, магнитным, оптическим или другим физическим запоминающим устройством, которое может содержать или хранить информацию, такую как исполняемые инструкции, данные и т.д. Например, машиночитаемый носитель данных может быть: RAM (оперативная память), энергозависимая память, энергонезависимая память, флэш-память, устройства хранения данных (например, жесткие диски), твердотельные накопители, любые типы дисков хранения (например, оптические диски, DVD-диски и т.д.), аналогичные носители информации или их комбинация.
[516] В некоторых вариантах осуществления изобретения предоставляется машиночитаемый носитель данных, на котором хранятся машиночитаемые инструкции, и машиночитаемые инструкции выполняются процессором для осуществления описанного выше способа декодирования. Например, машиночитаемый носитель данных может представлять собой ROM, RAM, CD-ROM, ленты, программные диски, оптические устройства хранения данных и т.д.
[517] На фиг.10 показана структурная схема устройства кодирования, предусмотренная вариантами осуществления настоящей заявки, и устройство может содержать: первый блок 1010 определения, сконфигурированный для определения информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU; блок 1020 построения, выполненный с возможностью построения списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU; второй блок 1030 определения, сконфигурированный для определения информации о координатах целевой согласующейся CU, соответствующей каждому номеру режима ETMVP в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов; третий блок 1040 определения, сконфигурированный для определения информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определения информации о движении подблока в соответствующей позиции в текущей CU согласно информации о движении каждого подблока в целевой согласующейся CU; блок 1050 МС, сконфигурированный для выполнения МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU; блок 1060 кодирования, сконфигурированный для вычисления стоимости скорости-искажения, соответствующей режиму ETMVP, сравнения стоимости скорости-искажения с соответствующими значениями стоимости скорости-искажения других режимов предсказания, выбора режима предсказания, соответствующего наименьшей стоимости скорости-искажения, а затем записи флага режима ETMVP и значения индекса режима ETMVP для выбранного режима ETMVP в битовый поток, который должен быть передан на устройство декодирования.
[518] В некоторых вариантах осуществления изобретения первый блок 1010 определения определяет информацию о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU, что включает: определение временного опорного изображения, в котором расположена согласующаяся CU, в соответствии с типом текущего кадра изображения; определение информации о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU; при этом, если типом текущего кадра изображения является Р-изображение, временное опорное изображение находится в списке 0 опорных изображений, и его значение индекса опорного кадра равно 0; если типом текущего кадра изображения является В-изображение, временное опорное изображение находится в списке 1 опорных изображений, а его значение индекса опорного кадра равно 0.
[519] В некоторых вариантах осуществления изобретения первый блок 1010 определения определяет информацию о координатах начальной согласующейся CU во временном опорном изображении в соответствии с информацией о координатах текущей CU, что включает: определение информации о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении.
[520] В некоторых вариантах осуществления изобретения первый блок 1010 определения определяет информацию о координатах начальной согласующейся CU в соответствии с координатой левого верхнего угла текущей LCU, размером LCU, размером текущего изображения, размером текущей CU и координатой левого верхнего угла текущей CU на изображении, что включает: определение абсциссы начальной согласующейся CU в соответствии с абсциссой левого верхнего угла текущей LCU на изображении, размером LCU, шириной текущей CU, шириной текущего изображения и абсциссой левого верхнего угла текущей CU на изображении; определение ординаты начальной согласующейся CU в соответствии с ординатой левого верхнего угла текущей LCU на изображении, размером LCU, высотой текущей CU, высотой текущего изображения и ординатой левого верхнего угла текущей CU на изображении.
[521] В некоторых вариантах осуществления изобретения блок 1020 построения строит список расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU, что включает: определение по меньшей мере одного номера режима ETMVP в соответствии с информацией о координатах начальной согласующейся CU; построение списка расширенных временных кандидатов согласно по меньшей мере одному номеру режима ETMVP.
[522] В некоторых вариантах осуществления изобретения информация о координатах согласующейся CU представляет собой координату левого верхнего угла согласующейся CU во временном опорном изображении; блок 1020 построения строит список расширенных временных кандидатов в соответствии по меньшей мере с одним номером режима ETMVP, что включает:
добавление режима ETMVP с номером 0 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Му+8 меньше или равно меньшим значениям y_ctb_pos+lcu_size-cu_height и vertical size-cuheight, и информация о движении позиции А1 отличается от информации о движении позиции С3, или информация о движении позиции А2 отличается от информации о движении позиции С4, то добавление режима ETMVP с номером 1 в список расширенных временных кандидатов, увеличение длины списка расширенных временных кандидатов на 1;
если Мх+8 меньше или равно меньшим значениям х_ctb_pos+lcu_size-cu_width и horizontal_size-cu_width, и информация о движении позиции А1 отличается от информации о движении позиции В2, или информация о движении позиции A3 отличается от информации о движении позиции В4, то добавление режима ETMVP с номером 2 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Му-8 больше или равно у ctbjtos, и информация о движении позиции A3 отличается от информации о движении позиции С1, или информация о движении позиции А4 отличается от информации о движении позиции С2, то добавление ETMVP режим с номером 3 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
если Мх-8 больше или равно x_ctb_pos, и информация о движении позиции А2 отличается от информации о движении позиции В1, или информация о движении позиции А4 отличается от информации о движении позиции ВЗ, то добавление ETMVP режим с номером 4 в список расширенных временных кандидатов и увеличение длины списка расширенных временных кандидатов на 1;
[523] где (Мх, My) - информация о координатах начальной согласующейся CU, (x_ctb_pos, y_ctb_pos) - координата левого верхнего угла текущей LCU на изображении, leu size - размер LCU, cu width и cu height - ширина и высота текущей CU соответственно, a horizontal size и vertical size - ширина и высота текущего изображения соответственно;
[524] А1 - это блок 4*4 в левом верхнем углу начальной согласующейся CU, В1 - блок 4*4 непосредственно слева от А1, и С1 - блок 4*4 непосредственно над А1; А2 - это блок 4*4 в правом верхнем углу начальной согласующейся CU, В2 - блок 4*4 непосредственно справа от А2, и С2 - блок 4*4 непосредственно над А2; A3 - это блок 4*4 в левом нижнем углу начальной согласующейся CU, В3-блок 4*4 непосредственно слева от A3, и С3-блок 4*4 непосредственно под A3; А4 - это блок 4*4 в правом нижнем углу начальной согласующейся CU, В4 - блок 4*4 непосредственно справа от А4, и С4 - блок 4*4 непосредственно под А4.
[525] В некоторых вариантах осуществления изобретения блок 1020 построения строит список расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU, что также включает: когда длина списка расширенных временных кандидатов меньше 5, выполнение следующих операций в цикле до тех пор, пока длина списка расширенных временных кандидатов не станет равной 5: добавление другого номера в список расширенных временных кандидатов, который является последним номером режима ETMVP в списке, и увеличение длины списка расширенных временных кандидатов на 1.
[526] В некоторых вариантах осуществления изобретения второй блок 1030 определения определяет информацию о координатах целевой согласующейся CU, соответствующей каждому номеру режима ETMVP в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов, что включает: для каждого проходимого номера режима ETMVP в списке расширенных временных кандидатов,
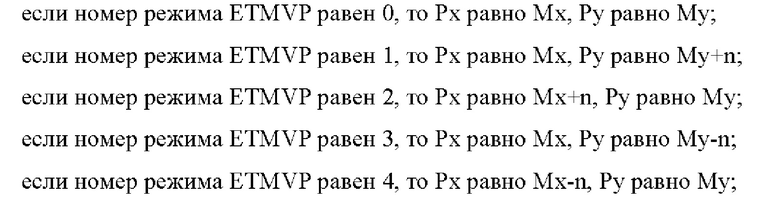
[527] При этом (Мх, My) - координата левого верхнего угла начальной согласующейся CU, а (Рх, Ру) - координата левого верхнего угла целевой согласующейся CU.
[528] В некоторых вариантах осуществления изобретения третий блок 1040 определения определяет информацию о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU, что включает: для любого подблока в целевой согласующейся CU, когда типом текущего кадра изображения является Р-изображение, если информация о движении в прямом направлении для подблока доступна, то информация о движении в прямом направлении для подблока масштабируется к первому кадру List0, и масштабированная информация о движении в прямом направлении предоставляется подблоку в соответствующей позиции в текущей CU.
[529] В некоторых вариантах осуществления изобретения третий блок 1040 определения определяет информацию о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU, что включает: для любого подблока в целевой согласующейся CU, когда типом текущего кадра изображения является В-изображение, если информация о движении в прямом направлении и информация о движении в обратном направлении для подблока доступны, информация о движении в прямом направлении и информация о движении в обратном направлении для подблока масштабируются соответственно с указанием на первый кадр List0 и первый кадр из List1, и масштабированная информация о движении в прямом направлении и информация о движении в обратном направлении соответственно предоставляются подблоку в соответствующей позиции в текущей CU; если доступна информация о движении в прямом направлении для подблока, но информация о движении в обратном направлении недоступна, информация о движении в прямом направлении для подблока масштабируется с указанием на первый кадр List0, а масштабированная информация о движении в прямом направлении предоставляется подблоку в соответствующей позиции в текущей CU; если информация о движении в обратном направлении для подблока доступна, но информация о движении в прямом направлении недоступна, информация о движении в обратном направлении для подблока масштабируется с указанием на первый кадр List1, и масштабированная информация о движении в обратном направлении предоставляется подблоку в соответствующей позиции в текущей CU.
[530] Если ни информация о движении в прямом направлении, ни информация о движении в обратном направлении для подблока недоступны, когда доступны как информация о движении в прямом направлении, так и информация о движении в обратном направлении первого окружающего блока текущей CU, информация о движении в прямом направлении и информация о движении в обратном направлении первого окружающего блока масштабируются к первому кадру List0 и первому кадру List1 соответственно, и масштабированная информация о движении в прямом направлении и масштабированная информация о движении в обратном направлении предоставляются подблоку в соответствующей позиции в текущей CU соответственно; когда информация о движении в прямом направлении первого окружающего блока доступна, но его информация о движении в обратном направлении недоступна, его информация о движении в прямом направлении масштабируется к первому кадру List0, и масштабированная информация о движении в прямом направлении предоставляется подблоку в соответствующей позиции в текущей CU; когда информация о движении в обратном направлении первого окружающего блока доступна, но его информация о движении в прямом направлении недоступна, его информация о движении в обратном направлении масштабируется к первому кадру списка List1, а масштабированная информация о движении в обратном направлении предоставляется подблоку в соответствующей позиции в текущей CU; когда ни информация о движении в прямом направлении, ни информация о движении в обратном направлении первого окружающего блока недоступны, нулевая информация о движении предоставляется подблоку в соответствующей позиции в текущей CU;
[531] В некоторых вариантах осуществления изобретения блок 1050 МС выполняет МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU, что включает: для любого подблока текущей CU не использовать DMVR для его информации о движении; если подблок удовлетворяет условиям применения BIO, МС выполняется в подблоке в соответствии с информацией о движении подблока, и способы BIO используются для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока; в противном случае выполняют МС над подблоком в соответствии с информацией о движении подблока и получают матрицу отсчетов предсказания подблока; при этом отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
[532] В возможном варианте осуществления изобретения упомянутое выше устройство кодирования может включать видеокодер.
[533] На фиг.11 показана схема аппаратной структуры устройства кодирования, предусмотренная вариантами осуществления настоящей заявки. Устройство кодирования включает процессор 1101 и машиночитаемый носитель 1102 данных, на котором хранятся машиночитаемые инструкции. Процессор 1101 и машиночитаемый носитель 1102 данных могут обмениваться данными через системную шину 1103. Кроме того, путем считывания и выполнения машиночитаемых инструкций, соответствующих логике управления кодированием и хранимых на машиночитаемом носителе 1102 данных, процессор 1101 может выполнять описанный выше способ кодирования.
[534] Машиночитаемый носитель 1102 данных, упомянутый здесь, может быть любым электронным, магнитным, оптическим или другим физическим устройством хранения, которое может содержать или хранить информацию, такую как исполняемые инструкции, данные и т.д. Например, машиночитаемый носитель данных может представлять собой RAM (оперативную память), энергозависимую память, энергонезависимую память, флэш-память, устройства хранения данных (например, жесткие диски), твердотельные накопители, любые типы дисков хранения (например, оптические диски, DVD-диски и т.д.), аналогичные носители информации или их комбинацию.
[535] В некоторых вариантах осуществления изобретения предоставляется машиночитаемый носитель данных, на котором хранятся машиночитаемые инструкции, которые выполняются процессором для осуществления описанного выше способа кодирования. Например, машиночитаемый носитель данных может представлять собой ROM, RAM, CD-ROM, ленты, программные диски, оптические устройства хранения данных и т.д.
[536] В некоторых вариантах осуществления изобретения также предусмотрено устройство камеры, которое включает устройство кодирования в любом из описанных выше вариантов осуществления изобретения и устройство декодирования в любом из описанных выше вариантов осуществления изобретения.
[537] Следует отметить, что в настоящей заявке относительные термины, такие как первый и второй, используются только для различения объекта или операции от другого объекта или операции и не обязательно требуют или подразумевают какие-либо такие фактические отношения или порядок между этими объектами или операциями. Кроме того, термин «включающий», «содержащий» или любой другой его вариант предназначен для охвата неисключительных включений, так что процесс, способ, изделие или устройство, включающие ряд элементов, включают не только эти элементы, но также и другие элементы, прямо не перечисленные, или элементы, присущие такому процессу, способу, изделию или оборудованию. При отсутствии дополнительных ограничений элементы, используемые с выражением «включающий (содержащий) один...», не исключают наличия других идентичных элементов в процессе, способе, изделии или устройстве, которые включают эти элементы.
[538] Приведенное выше описание представляет собой только предпочтительные варианты осуществления настоящей заявки и не предназначено для ограничения настоящего изобретения. Любая модификация, эквивалентная замена, усовершенствование и т.д., выполненные в пределах сущности настоящего изобретения, должны быть включены в объем охраны изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВИДЕОКОДИРОВАНИЯ C ИСПОЛЬЗОВАНИЕМ УЛУЧШЕННОГО РЕЖИМА СЛИЯНИЯ С РАЗНОСТЬЮ ВЕКТОРОВ ДВИЖЕНИЯ | 2019 |
|
RU2795830C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВИДЕОКОДИРОВАНИЯ C ИСПОЛЬЗОВАНИЕМ УЛУЧШЕННОГО РЕЖИМА СЛИЯНИЯ С РАЗНОСТЬЮ ВЕКТОРОВ ДВИЖЕНИЯ | 2019 |
|
RU2768377C1 |
| УСТРОЙСТВО И СПОСОБ ВНЕШНЕГО ПРЕДСКАЗАНИЯ | 2019 |
|
RU2785725C2 |
| ВЫВЕДЕНИЕ ВЕКТОРА ДВИЖЕНИЯ ПРИ ВИДЕОКОДИРОВАНИИ | 2016 |
|
RU2742298C2 |
| ВЫВОД ИНФОРМАЦИИ ДВИЖЕНИЯ ДЛЯ ПОДБЛОКОВ ПРИ ВИДЕОКОДИРОВАНИИ | 2016 |
|
RU2705428C2 |
| ОПРЕДЕЛЕНИЕ РЕЖИМА ВЫВОДА ИНФОРМАЦИИ ДВИЖЕНИЯ ПРИ ВИДЕОКОДИРОВАНИИ | 2016 |
|
RU2719296C2 |
| СПОСОБ И УСТРОЙСТВО КОДИРОВАНИЯ/ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ И НОСИТЕЛЬ ЗАПИСИ, ХРАНЯЩИЙ БИТОВЫЙ ПОТОК | 2023 |
|
RU2824753C1 |
| СПОСОБ И УСТРОЙСТВО КОДИРОВАНИЯ/ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ И НОСИТЕЛЬ ЗАПИСИ, ХРАНЯЩИЙ БИТОВЫЙ ПОТОК | 2022 |
|
RU2806878C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛОВ ВИДЕО С ИСПОЛЬЗОВАНИЕМ ИНТЕР-ПРЕДСКАЗАНИЯ | 2019 |
|
RU2787882C2 |
| СПОСОБ И УСТРОЙСТВО КОДИРОВАНИЯ/ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ И НОСИТЕЛЬ ЗАПИСИ, ХРАНЯЩИЙ БИТОВЫЙ ПОТОК | 2019 |
|
RU2775829C1 |
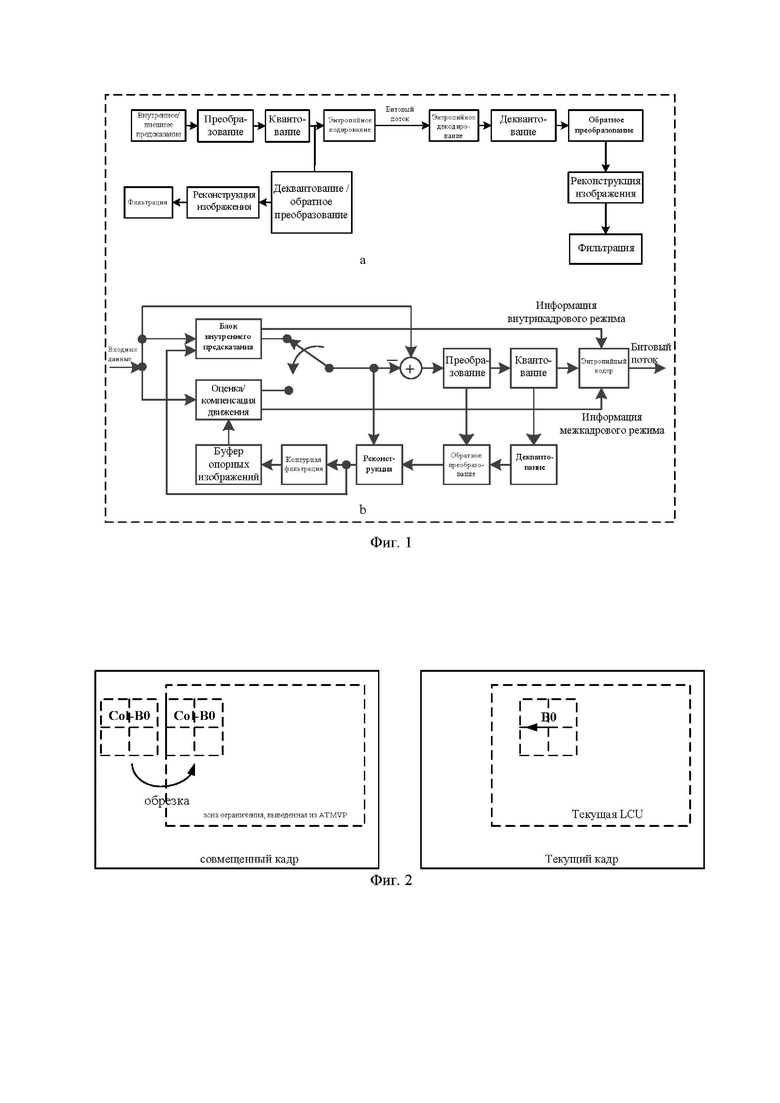
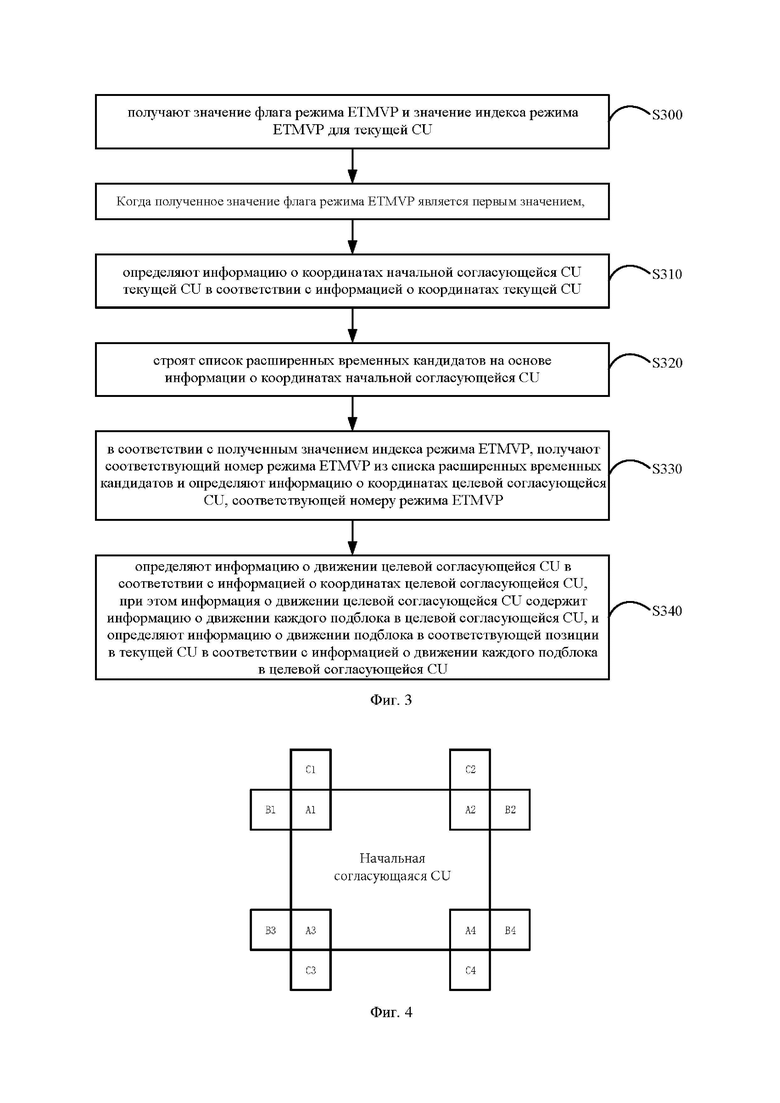
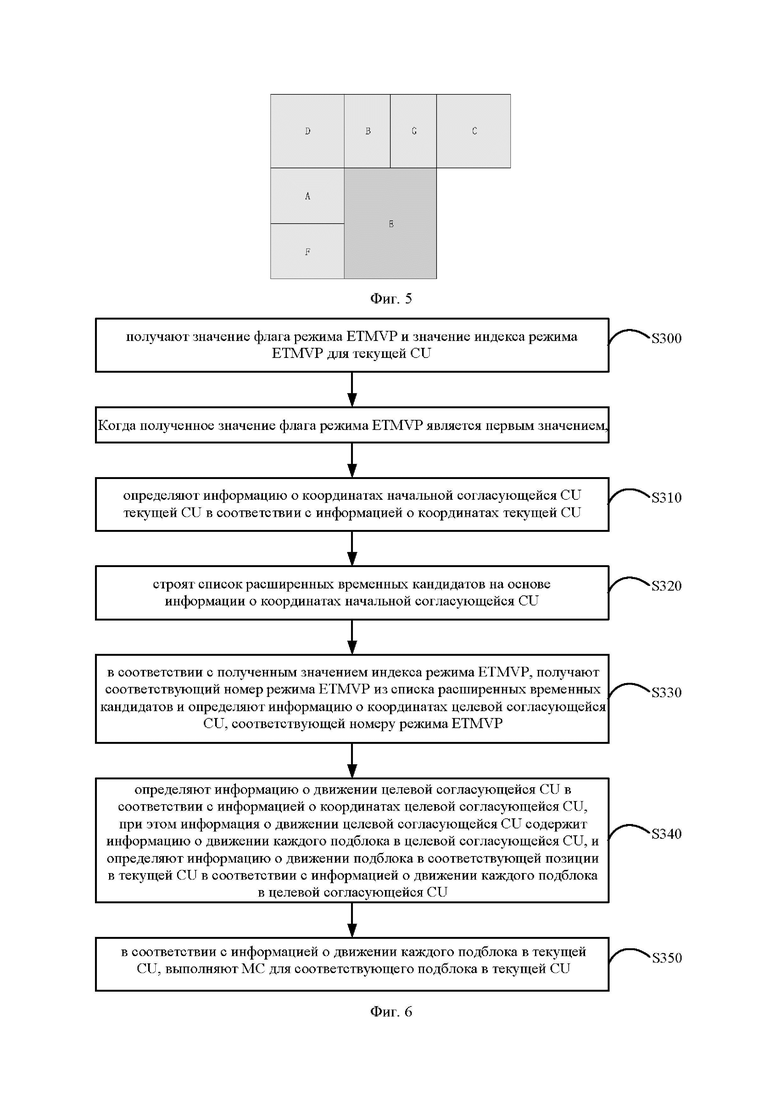
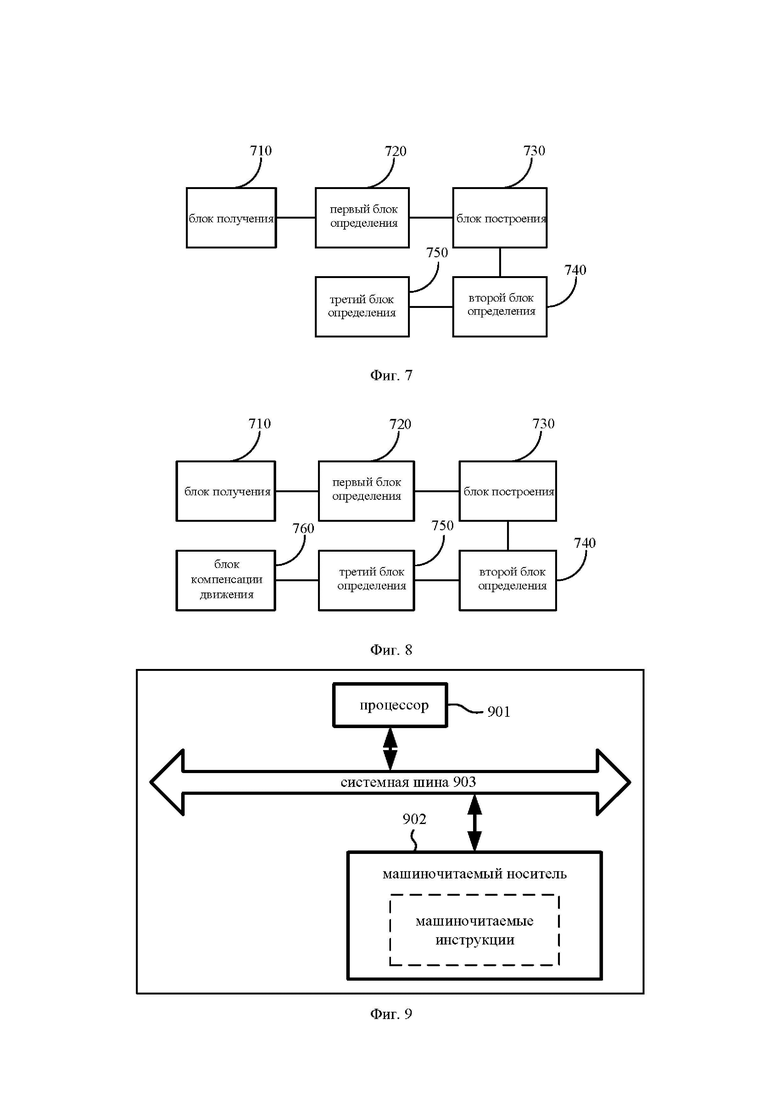
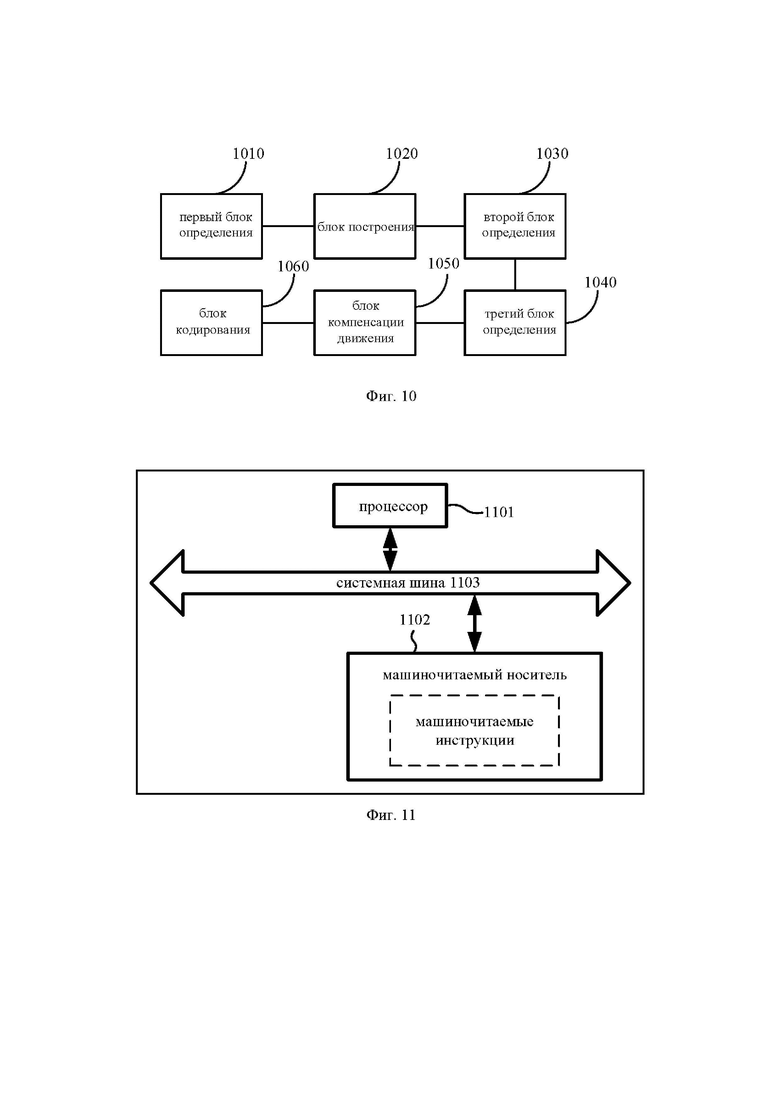
Изобретение относится к средствам кодирования видео. Технический результат заключается в повышении эффективности кодирования видео. Определяют информацию о координатах начальной согласующейся единицы кодирования (CU) текущей CU в соответствии с информацией о координатах текущей CU. Строят список расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU. Определяют информацию о координатах целевой согласующейся CU, соответствующей каждому номеру режима расширенного временного предсказания вектора движения (ETMVP) в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов. Определяют информацию о движении целевой согласующейся CU. Информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU. Определяют информацию о движении подблока в соответствующей позиции в текущей CU. Выполняют компенсацию движения (МС) для каждого подблока в текущей CU. Вычисляют стоимость скорости-искажения для каждого режима ETMVP и выбирают режим предсказания, соответствующий наименьшей стоимости скорости-искажения. 7 н. и 5 з.п. ф-лы, 11 ил., 2 табл.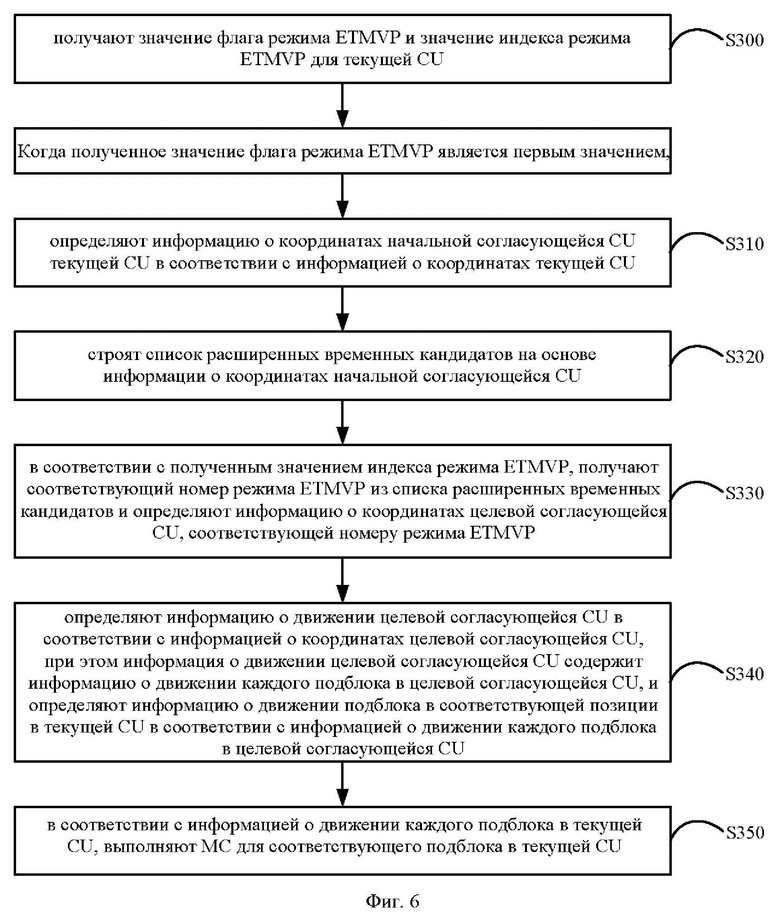
1. Способ декодирования, включающий:
получение значения флага режима расширенного временного предсказания вектора движения (ETMVP) и значения индекса режима ETMVP для текущей единицы кодирования (CU);
когда значение флага режима ETMVP является первым значением:
определение информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU;
построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
получение соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определение информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP;
определение информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU;
выполнение компенсации движения (МС) для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU.
2. Способ по п. 1, в котором выполнение МС для соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU включает следующее:
для любого подблока текущей CU не используют уточнение вектора движения на стороне декодера (DMVR) для его информации о движении;
если подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), МС выполняют для подблока в соответствии с информацией о движении подблока и способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока;
в противном случае выполняют МС для подблока в соответствии с информацией о движении подблока и получают матрицу отсчетов предсказания подблока;
при этом отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
3. Способ по п. 2, в котором подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), по меньшей мере включающим:
согласно высокоуровневому синтаксису уровня последовательности, способы BIO включены;
точность MV текущей CU равна 0;
подблок использует двунаправленное предсказание;
для этого подблока опорный кадр, значение индекса которого равно refIdxL0 в списке 0 опорных изображений, и опорный кадр, значение индекса которого равно refIdxL1 в списке 1 опорных изображений, соответственно отображают с обеих сторон текущего кадра.
4. Способ по п. 2, в котором способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока, при этом способ включает
определение матрицы отсчетов предсказания подблока в соответствии со значением МС в прямом направлении, значением МС в обратном направлении и значением смещения оптического потока подблока.
5. Способ кодирования, включающий:
определение информации о координатах начальной согласующейся единицы кодирования (CU) текущей CU в соответствии с информацией о координатах текущей CU;
построение списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
определение информации о координатах целевой согласующейся CU, соответствующей каждому номеру режима расширенного временного предсказания вектора движения (ETMVP) в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов;
определение информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определение информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU;
выполнение компенсации движения (МС) для каждого подблока в текущей CU в соответствии с информацией о движении подблока в текущей CU;
вычисление стоимости скорости-искажения для каждого режима ETMVP и сравнение стоимости скорости-искажения с соответствующими значениями стоимости скорости-искажения других режимов предсказания для выбора режима предсказания, соответствующего наименьшей стоимости скорости-искажения; и
запись флага режима ETMVP и значения индекса режима ETMVP для выбранного режима предсказания в битовый поток для передачи на устройство декодирования;
при этом выполнение МС для каждого подблока в текущей CU в соответствии с информацией о движении подблока в текущей CU включает следующее:
для любого подблока текущей CU не выполняют уточнение вектора движения на стороне декодера (DMVR) для информации о движении подблока;
если подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), выполняют МС для подблока в соответствии с информацией о движении подблока и используют способы BIO для добавления значения смещения оптического потока к скомпенсированному значению пикселя и получают матрицу отсчетов предсказания подблока;
в противном случае выполняют МС для подблока в соответствии с информацией о движении подблока и получают матрицу отсчетов предсказания подблока,
при этом отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
6. Способ по п. 5, в котором подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), по меньшей мере включающим:
согласно высокоуровневому синтаксису уровня последовательности, способы BIO включены;
точность MV текущей CU равна 0;
подблок использует двунаправленное предсказание;
для этого подблока опорный кадр, значение индекса которого равно refIdxL0 в списке 0 опорных изображений, и опорный кадр, значение индекса которого равно refIdxL1 в списке 1 опорных изображений, соответственно отображают с обеих сторон текущего кадра.
7. Способ по п. 5, в котором способы BIO используют для добавления значения смещения оптического потока к скомпенсированному значению пикселя, затем получают матрицу отсчетов предсказания подблока, включает:
определение матрицы отсчетов предсказания подблока в соответствии со значением MC в прямом направлении, значением MC в обратном направлении и значением смещения оптического потока подблока.
8. Устройство декодирования, содержащее:
блок получения, сконфигурированный для получения значения флага режима расширенного временного предсказания вектора движения (ETMVP) и значения индекса режима ETMVP для текущей единицы кодирования (CU);
первый блок определения, сконфигурированный для определения информации о координатах начальной согласующейся CU текущей CU в соответствии с информацией о координатах текущей CU, когда значение флага режима ETMVP является первым значением;
блок построения, сконфигурированный для построения списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
второй блок определения, сконфигурированный для получения соответствующего номера режима ETMVP из списка расширенных временных кандидатов в соответствии со значением индекса режима ETMVP и определения информации о координатах целевой согласующейся CU, соответствующей номеру режима ETMVP;
третий блок определения, сконфигурированный для определения информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определения информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU; и
блок компенсации движения (МС), сконфигурированный для выполнения МС соответствующего подблока в текущей CU в соответствии с информацией о движении каждого подблока в текущей CU.
9. Устройство кодирования, содержащее:
первый блок определения, сконфигурированный для определения информации о координатах начальной согласующейся единицы кодирования (CU) текущей CU в соответствии с информацией о координатах текущей CU;
блок построения, выполненный с возможностью построения списка расширенных временных кандидатов на основе информации о координатах начальной согласующейся CU;
второй блок определения, сконфигурированный для определения информации о координатах целевой согласующейся CU, соответствующей каждому расширенному временному режиму-кандидату в списке расширенных временных кандидатов, путем последовательного прохождения номеров режимов ETMVP в списке расширенных временных кандидатов;
третий блок определения, сконфигурированный для определения информации о движении целевой согласующейся CU в соответствии с информацией о координатах целевой согласующейся CU, при этом информация о движении целевой согласующейся CU содержит информацию о движении каждого подблока в целевой согласующейся CU, и определения информации о движении подблока в соответствующей позиции в текущей CU в соответствии с информацией о движении каждого подблока в целевой согласующейся CU;
блок компенсации движения (МС), сконфигурированный для выполнения компенсации движения для каждого подблока в текущей CU в соответствии с информацией о движении подблока в текущей CU;
блок кодирования, сконфигурированный для вычисления стоимости скорости-искажения, соответствующей каждому режиму ETMVP, сравнения стоимости скорости-искажения с соответствующими значениями стоимости скорости-искажения других режимов предсказания, выбора режима предсказания, соответствующего наименьшей стоимости скорости-искажения, и затем записи флага режима ETMVP и значения индекса режима ETMVP для выбранного режима ETMVP в битовый поток для передачи на устройство декодирования,
при этом блок МС сконфигурирован для:
невыполнения, для любого подблока текущей CU, уточнения вектора движения на стороне декодера (DMVR) для информации о движении подблока;
если подблок удовлетворяет условиям применения двунаправленного оптического потока (BIO), выполнения МС для подблока в соответствии с информацией о движении подблока, использования способов BIO для добавления значения смещения оптического потока к скомпенсированному значению пикселя и получения матрицы отсчетов предсказания подблока;
в противном случае выполнения МС для подблока в соответствии с информацией о движении подблока и получения матрицы отсчетов предсказания подблока,
при этом отсчеты предсказания текущей CU состоят из отсчетов предсказания каждого подблока.
10. Устройство декодирования, содержащее процессор и машиночитаемый носитель данных, при этом машиночитаемый носитель данных хранит машиночитаемые инструкции, выполняемые процессором, и процессор сконфигурирован для выполнения машиночитаемых инструкций для осуществления способа по любому из пп. 1-4.
11. Устройство кодирования, содержащее процессор и машиночитаемый носитель данных, при этом машиночитаемый носитель данных хранит машиночитаемые инструкции, выполняемые процессором, и процессор сконфигурирован для выполнения машиночитаемых инструкций для осуществления способа по любому из пп. 5-7.
12. Машиночитаемый носитель данных, хранящий машиночитаемые инструкции, при выполнении которых одним или более процессорами осуществляется способ по любому из пп. 1-4 или 5-7.
| CN 110662075 A, 07.01.2020 | |||
| US 7924923 B2, 12.04.2011 | |||
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОГО ВЫБОРА КОНТЕКСТНОЙ МОДЕЛИ ДЛЯ КОДИРОВАНИЯ ПО ЭНТРОПИИ | 2006 |
|
RU2336661C2 |
| CN 112243586 A, 19.01.2021 | |||
| CN 112153389 A, 29.12.2020 | |||
| CN 111953995 A, 17.11.2020 | |||
| КОДИРОВАНИЕ ВИДЕО, ИСПОЛЬЗУЯ АДАПТИВНОЕ РАЗРЕШЕНИЕ ВЕКТОРА ДВИЖЕНИЯ | 2012 |
|
RU2580054C2 |

