Изобретение относится к медицинской технике и может быть использовано в электрохирургических системах, предназначенных для рассечения и удаления как мягких, так и плотных костных и хрящевых биологических тканей при обеспечении малой кровопотери.
Известен электрохирургический генератор, описанный в А.С. РФ №1410959 А61В 17/39, опубл. 23.07.1988. Он содержит последовательно включенные задающий генератор, импульсный модулятор, усилитель мощности ключевого типа на полевых транзисторах, выходную цепь, активный и пассивный электроды. Импульсный модулятор состоит из двух каналов, питаемых от раздельных регулируемых источников питания, при этом выходы каналов объединены через суммирующий диод. В этом электрохирургическом генераторе при проведении операции высокочастотное напряжение, подводимое к биологической ткани, имеет форму, соответствующую относительной амплитудно-импульсной модуляции. Глубина импульсной модуляции определяется требуемым размером разреза биологической ткани и задается уровнем выходного напряжения регулируемого источника питания, подключенного ко второму канала модулятора. Средняя мощность на выходе электрохирургического генератора определяется выходным напряжением первого канала модулятора. Основным недостатком данного электрохирургического генератора является работа на относительно низкой рабочей частоте (440 кГц), что не позволяет обеспечить малую ширину разреза и нужный уровень коагуляции, что приводит к достаточно большой кровопотери. Кроме того, в данном устройстве отсутствует стабилизация подводимой к биологической ткани мощности, следовательно, нестабильной оказывается и температура при изменении в широких пределах электрического сопротивления биологической ткани. Это приводит к необходимости ручной регулировки уровня подводимой мощности в процессе операции.
Известен также электрохирургический генератор, описанный в патенте США №2011170321, опубл. 14.07.2011. Данное устройство содержит выпрямительное устройство, связанное с регулируемым источником питания, который подключен к генератору мощности, выходные клеммы которого соответственно соединены с активным и пассивным электродами, и блок управления, выполненный на микроконтроллере и подключенный к регулируемому источнику питания. Кроме того, в состав электрохирургического генератора входит также устройство сравнения, к которому подключен датчик выходного напряжения генератора мощности и формирователь задающего напряжения для установки уровня выходного напряжения генератора мощности, при этом выход устройства сравнения подключен к блоку управления. Выходные транзисторы генератора мощности работают в ключевом режиме. Блок управления независимо от электрического сопротивления нагрузки генератора мощности поддерживает постоянной величину выходного тока регулируемого источника питания в соответствии с заранее заданным врачом значением. Это позволяет сформировать на выходе генератора мощности высокочастотное напряжение с постоянной амплитудой при изменяющемся электрическом сопротивлении биологической ткани, которое и является нагрузкой. В ходе проведения операции врач с помощью формирователя задающего напряжения может изменять значение выходного тока регулируемого источника питания, и соответственно, амплитуду высокочастотного напряжения генератора мощности, которая определяет температуру в рабочей зоне воздействия активного электрода. Описываемый электрохирургический генератор представляет собой смешанную аналого-цифровую систему автоматического регулирования и предназначен для работы в диапазоне частот 0,4-4,0 МГц. Недостатком данного устройства является ограниченный динамический диапазон допустимых значений электрического сопротивления биологической ткани и необходимость ручного регулирования потребляемого генератором мощности тока в процессе хирургической операции. За счет ручного регулирования возникает большая нестабильность температуры в рабочей зоне.
Известен также электрохирургический генератор, взятый в качестве прототипа предлагаемого изобретения и описанный в патенте РФ №2166299, А61В 18/10, опубл. 10.05.2001, Бюл. №13. Прототип содержит регулируемый блок питания, к которому подключен блок управления, генератор мощности, в состав которого входит задающий рабочую частоту маломощный автогенератор, выходной сигнал которого управляет мощными полевыми транзисторами генератора мощности, работающими в ключевом режиме, формирователь напряжения, определяющего амплитуду выходного высокочастотного тока и соединенный с блоком управления. Прототип также содержит датчик выходного высокочастотного тока, подключенный к блоку управления, и выходную цепь с активным и пассивным электродами. Выход блока управления связан с регулируемым блоком питания. При этом амплитуда выходного высокочастотного тока в процессе хирургической операции устанавливается врачом. В прототипе для воздействия на биологическую ткань используется высокочастотный сигнал рабочей частотой 1,76 МГц и мощностью 10-50 Вт. Описываемое устройство представляет собой сложную аналого-цифровую систему автоматического регулирования и позволяет с достаточно высокой точностью поддерживать заданное врачом значение амплитуды высокочастотного тока в рабочей зоне. Основным недостатком прототипа является то, что в качестве стабилизируемого параметра используется амплитуда высокочастотного тока. Это позволяет стабилизировать температуру биологической ткани в рабочей зоне лишь в ограниченном диапазоне изменения электрического сопротивления биологической ткани. При этом погрешность стабилизации температуры оказывается значительной. Это объясняется тем, что при фиксированной амплитуде высокочастотного тока и изменяющемся электрическом сопротивлении биологической ткани будет существенно изменяться подводимая в рабочую зону мощность высокочастотного сигнала.
Это приведет к большому изменению температуры. Указанные факторы значительно затрудняют работу хирурга на данном электрохирургическом генераторе.
Задачей (техническим результатом) предлагаемого изобретения является повышение точности поддержания температуры в рабочей зоне биологической ткани в широком диапазоне изменения ее электрического сопротивления, упрощение конструкции и обеспечение удобства управления электрохирургическим генератором при проведении операций.
Поставленная задача достигается тем, что в электрохирургический генератор, содержащий импульсный регулируемый блок питания с управляющим входом, выход которого соединен с генератором мощности, имеющим два выхода, при этом к первому выходу подключен пассивный электрод, датчик тока, вход которого подключен ко второму выходу генератора мощности, а первый выход датчика тока соединен с активным электродом, формирователь напряжения, пропорционального задаваемой температуре, введены датчик напряжения, вход которого подключен к первому выходу датчика тока, перемножитель высокочастотных сигналов, входы которого соответственно подключены ко второму выходу датчика тока и выходу датчика напряжения, первое инерционное апериодическое звено, вход которого соединен с выходом перемножителя высокочастотных сигналов, операционный усилитель, к инвертирующему входу которого подключен выход первого инерционного апериодического звена, а к неинвертирующему входу подключен формирователь напряжения, пропорционального задаваемой температуре, второе инерционное апериодическое звено, вход которого соединен с выходом операционного усилителя, а выход подключен к управляющему входу импульсного регулируемого блока питания.
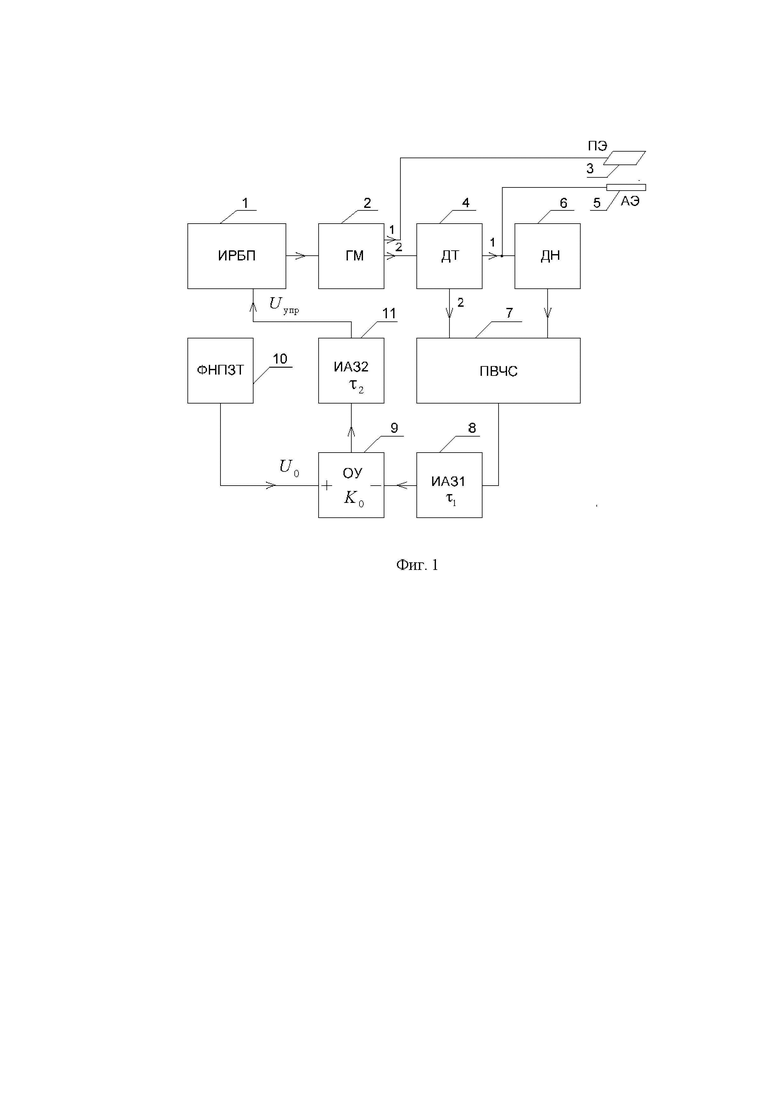
На фиг. 1 представлена схема предлагаемого электрохирургического генератора.
Электрохирургический генератор содержит импульсный регулируемый блок питания (ИРБП) 1, выход которого соединен с генератором мощности (ГМ) 2. Первый выход генератора мощности 2 соединен с пассивным электродом 3. Ко второму выходу генератора мощности 2 подключен вход датчика тока (ДТ) 4, с двумя выходами. Первый выход датчика тока 4 подключен к активному электроду 5. Вход датчика напряжения (ДН) 6 соединен с первым выходом датчика тока 4. Второй выход датчика тока 4 и выход датчика напряжения 5 подключены к соответствующим входам перемножителя высокочастотных сигналов (ПВЧС) 7. К выходу перемножителя высокочастотных сигналов 7 подключен вход первого инерционного апериодического звена (ИАЗ1) 8, выход которого подключен к инвертирующему входу операционного усилителя (ОУ) 9, к неинвертирующему входу которого подключен выход формирователя напряжения, пропорционального задаваемой температуре (ФНПЗТ) 10. К выходу операционного усилителя 9 подключен вход второго инерционное апериодическое звена (ИАЗ2) 11, выход которого подключен к управляющему входу импульсного регулируемого блока питания 1.
Предлагаемое устройство работает следующим образом. Перед проведением операции хирург устанавливает пациенту пассивный электрод 3, как можно ближе к рабочей зоне биологической ткани, куда подводится активный электрод 5. Отметим, что первый выход генератора мощности 2, пассивный электрод 3 и общий корпус имеют нулевой потенциал. Далее задается рекомендованная температура биологической ткани с помощью формирователя напряжения, пропорционального задаваемой температуре 10, который представляет собой маломощный стабилизатор постоянного напряжения. На его выходе установлен переменный резистор, с которого снимается формируемое напряжение U0, пропорциональное задаваемой температуре. На первый выход датчика тока 4 высокочастотный сигнал с его входа проходит практически без ослабления и поступает на активный электрод 5 и датчик напряжения 6. На втором выходе датчика тока 4 формируется высокочастотный сигнал, амплитуда которого пропорциональна току, протекающему через активный электрод 5. Датчик тока 4 в рабочем диапазоне рабочих частот 0,4-4,0 МГц может быть реализован в виде трансформатора на ферритовом кольце с двумя обмотками (см. книгу К. Рохаммель Антенны, Том 2 / ДАНВЕЛ, Москва, 2005, с. 253, рис. 31.2). Первичная обмотка содержит (0,5-1) виток и включается между вторым выходом генератора мощности 2 и входом датчиком напряжения 6. Вторичная обмотка содержит (10-20) витков. На выходе датчика напряжения 6 формируется высокочастотный сигнал, амплитуда которого пропорциональна выходному напряжению генератора мощности 2. Датчик напряжения 6 может быть выполнен в виде обычного резистивного делителя напряжения, состоящего из двух последовательно включенных резисторов. В этом случае первый резистор делителя подключен к первому выходу датчика тока 4. Соединенные вместе выводы последовательно включенных резисторов описываемого делителя напряжения являются выходом датчика напряжения 6. Поскольку генератор мощности 2 работает в ключевом режиме, то его типовое значение коэффициента полезного действия имеет величину порядка 0,95. В этом случае амплитуда выходного высокочастотного напряжения генератора мощности 2 практически равна выходному напряжению импульсного регулируемого блока питания 1. С учетом вышеизложенного выходная мощность генератора мощности 2 определяется выходным напряжением импульсного регулируемого блока питания 1.
После перемножения высокочастотных сигналов датчика тока 4 и датчика напряжения 6 в перемножителе высокочастотных сигналов 7, на его выходе формируется напряжение в соответствии со следующим выражением

где: Um - амплитуда высокочастотного напряжения на активном электроде 5;
Im - амплитуда высокочастотного тока активного электрода 5;
ω0=2πƒ0 - рабочая частота генератора мощности 2;
KM - коэффициент передачи перемножителя высокочастотных сигналов 7;
KI - коэффициент передачи датчика тока 4;
KU - коэффициент передачи датчика напряжения 6.
В соотношении (1) для упрощения анализа принято, что начальные фазы сигналов на выходе датчика тока 4 и датчика напряжения 6 равны нулю и не изменяются во всем динамическом диапазоне изменения сопротивления биологической ткани. Это справедливо при использовании в качестве перемножителя высокочастотных сигналов в рабочем диапазоне частот 0,4-4,0 МГц балансных или кольцевых преобразователей частоты, выполненных с применением широкополосных трансформаторов на ферритовых кольцах.
На выходе первого инерционного апериодического звена 8, являющегося фильтром нижних частот первого порядка, который выполнен в виде R1C1 цепочки, выделяется постоянная составляющая выходного сигнала перемножителя высокочастотных сигналов 7 и подавляется рабочая частота ƒ0 и ее гармоники. Постоянная времени τ1=R1C1 первого инерционного апериодического звена 8 выбрана из общепринятого условия фильтрации рабочей частоты ƒ0 и ее гармоник

С учетом вышеизложенного запишем выражение для постоянной составляющей выходного напряжения перемножителя высокочастотных сигналов 7

В соответствии со схемой фиг. 1 предлагаемое устройство представляет собой аналоговую систему автоматического регулирования, в состав которой входит два инерционных апериодических звена 8 и 11. Между входами операционного усилителя 9 образуется сигнал ошибки малой величины ε, стремящейся к нулю при большом коэффициенте усиления K0 операционного усилителя 9. Значение K0 в основном определяет результирующий коэффициент передачи K разомкнутой системы автоматического регулирования:

где: S - крутизна характеристики управления импульсного регулируемого блока питания 1;
Uупр=ε⋅K0 - управляющее напряжение, образующееся на выходе операционного усилителя 9;
ε=U0-UM0 - сигнал ошибки, образующийся между инвертирующим и неинвертирующим входами операционного усилителя 9;
U0 - напряжение, поступающее от формирователя напряжения, пропорционального задаваемой температуре, 10 на неинвертирующий вход операционного усилителя 9.
Из соотношения (4) следует, что при K0>>1 коэффициент передачи разомкнутой системы K также имеет большую величину (K=KIKUKMK0SUупр>>1) и обеспечивает малую величину сигнала ошибки регулирования ε, равную  Для нахождения сигнала ошибки ε запишем следующее выражение
Для нахождения сигнала ошибки ε запишем следующее выражение

Из (5) получим соотношение для мощности Р=ImUm, подводимой к активному электроду 5 и, следовательно, к биологической ткани

Как видно из соотношения (6), в предлагаемом устройстве за счет использования в цепи обратной связи перемножителя 7, подводимая к активному электроду 5 мощность Р пропорциональна напряжению U0.
Каждому заданному значению U0 в системе автоматического регулирования будет сформировано соответствующее значение управляющего напряжения Uупр, которое соответственно будет определять подводимую мощность Р. В ходе операции врач может регулировать напряжение U0. Это в соответствии с (6) приведет к изменению подводимой в рабочую зону мощности Р.
Система автоматического регулирования работает таким образом, что исходное отклонение по различным причинам подводимой мощности на величину ΔР уменьшится и станет равным остаточному значению ошибки регулирования ΔР'

В соотношении (7) исходное отклонение ΔР обусловлено изменением электрического сопротивления биологической ткани.
Мощность Р, подводимая к биологической ткани, рассеивается в ней в виде тепла, в результате чего ее температура повышается. Это означает, что биологическая ткань представляет собой диссипативный элемент, имеющий соответствующее электрическое сопротивление. Далее воспользуемся известным соотношением для мощности, рассеваемой на диссипативном резистивном элементе, в данном случае биологической ткани:

где: Т - температура биологической ткани в рабочей зоне;
Т0 - температура окружающей среды;
RT - тепловое сопротивление биологической ткани.
Отметим, что тепловое сопротивление биологической ткани RT имеет размерность градус/Вт и в первом приближении слабо зависит от температуры. Кроме того, в диапазоне температур 35°С-135°С тепловое сопротивление RT практически не связано с другими параметрами биологической ткани. Соотношение (8) описывает необратимое преобразование в тепло (диссипацию) электрической мощности Р, подводимой к биологической ткани. Из (8) видно, что с учетом сделанных допущений, в таком диссипативном элементе, как биологическая ткань подводимая мощность Р пропорциональна ее температуре Т в рабочей зоне. Подставив соотношение (8) в (6), получим

Соотношение (9) показывает, что в предлагаемом электрохирургическом генераторе с помощью системы автоматического регулирования осуществлена стабилизация мощности Р=ImUm, подводимой к биологической ткани, при этом ее температура Т в рабочей зоне оказывается независимой от электрического сопротивления биологической ткани и поддерживается с достаточно высокой стабильностью на заданном уровне. Это означает, что стабилизация подводимой мощности Р обеспечивает стабилизацию температуры Т биологической ткани в рабочей зоне. Стабилизированное значение температуры Т пропорционально заданной величине напряжения U0, которое в свою очередь в соответствии с соотношением (6), определяет мощность Р, подводимую к биологической ткани. Таким образом температура Т будет поддерживаться с высокой точностью при изменении электрического сопротивления биологической ткани от единиц Ом до десятков кОм. Следует отметить, что в области высоких значений температуры происходит некоторое уменьшения теплового сопротивления биологической ткани RT. В этом случае, как следует из соотношения (8), для получения заданного значения температуры Т необходимо соответствующее увеличение подводимой мощности Р, которая будет стабильно поддерживаться системой автоматического регулирования. Исходя из сказанного, можно сделать вывод о том, что напряжение U0 связано однозначной функциональной зависимостью с температурой биологической ткани Т. В этом случае в указанном диапазоне температур при использовании калибровки нетрудно обеспечить пропорциональную зависимость между Р и T. Тогда в соответствии с (7) и (8) можно записать следующее соотношение

где: ΔT - исходное отклонение температуры;
ΔT' - остаточное отклонение температуры.
Отметим, что за счет естественных омических потерь в датчике тока 4 и в датчике напряжения 6 режим стабилизации мощности будет сохраняться даже в режиме короткого замыкания и холостого хода для активного электрода 5. Выбор постоянной времени τ2=R2C2 второго инерционного апериодического звена 11, который является фильтром нижних частот первого порядка, производится в соответствии с условием  где ƒu рабочая частота импульсного регулируемого блока питания 1, типовое значение которой равно 50 кГц. С учетом сказанного значение τ2 находится в пределах τ2=0,1-0,01 секунды. Указанное значение постоянной времени τ2 обеспечивает устойчивость работы операционного усилителя 9 с большим коэффициентом усиления K0 и позволяет получить требуемое быстродействие электрохирургического генератора, от которого зависит скорость разреза биологической ткани.
где ƒu рабочая частота импульсного регулируемого блока питания 1, типовое значение которой равно 50 кГц. С учетом сказанного значение τ2 находится в пределах τ2=0,1-0,01 секунды. Указанное значение постоянной времени τ2 обеспечивает устойчивость работы операционного усилителя 9 с большим коэффициентом усиления K0 и позволяет получить требуемое быстродействие электрохирургического генератора, от которого зависит скорость разреза биологической ткани.
Как известно, система автоматического регулирования с двумя инерционными апериодическими звеньями является потенциально устойчивой, а при выполнении условия τ2>>τ1 (ƒ0>>ƒu) ее переходная характеристика оказывается монотонной и не имеет затухающих колебаний. Это положительно сказывается на повышении точности стабилизации температуры. Как видно из соотношения (10) при K>>1 точность стабилизации температуры в рабочей зоне может составлять (1-2)%.
Упрощение конструкции по сравнению с прототипом достигнуто за счет исключения цифровой части системы автоматического регулирования, содержащей сложные алгоритмы для аппроксимации различных функциональных зависимостей.
При конструктивной реализации предложенного устройства для включения рабочего режима можно использовать ножную педаль, связанную с формирователем напряжения задания температуры 10. Это обеспечивает комфортность и удобство управления электрохирургическим генератором при проведении сложных операций и работе с биологической тканью различной плотности. В заключение описания принципа действия предлагаемого устройства отметим, что регулируемый импульсный источник питания 1 питается от сети 220 Вольт 50 Гц. Операционный усилитель 9 и формирователь напряжения, пропорционального задаваемой температуре, 10 запитываются постоянным напряжением, соответствующим техническим характеристикам примененной интегральной микросхемы и стабилитрона.
Таким образом, предлагаемый электрохирургический генератор обеспечивает высокую стабильность температуры в широком диапазоне изменения электрического сопротивления биологической ткани. Предложенное устройство отличается удобством управления при проведении операций, характеризуется простотой конструкции, хорошей физической реализуемостью всех элементов и высокой надежностью, что имеет большое значение для медицинской аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ОСЦИЛЛЯЦИОННЫЙ | 2005 |
|
RU2294712C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 2003 |
|
RU2241407C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 2000 |
|
RU2161932C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ВЫСОКОЧАСТОТНЫЙ | 2002 |
|
RU2221516C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 1999 |
|
RU2154437C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ВЫСОКОЧАСТОТНЫЙ | 2000 |
|
RU2166299C1 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОНКОХИРУРГИИ | 2007 |
|
RU2354327C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОХИРУРГИЧЕСКИХ ИЗМЕРЕНИЙ | 1998 |
|
RU2139000C1 |
| АППАРАТ ДЛЯ ХОЛОДНО-ПЛАЗМЕННОЙ ВЫСОКОЧАСТОТНОЙ ЭЛЕКТРОХИРУРГИИ | 2003 |
|
RU2241406C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ | 1998 |
|
RU2154436C2 |
Изобретение относится к медицинской технике. Электрохирургический генератор содержит импульсный регулируемый блок питания (1) с управляющим входом, выход которого соединен с генератором мощности (2), пассивный (3) и активный (5) электроды, датчик тока (4), а также формирователь напряжения (10), пропорционального задаваемой температуре. В устройство дополнительно введены датчик напряжения (6), перемножитель высокочастотных сигналов (7), первое (8) и второе (11) инерционные апериодически звенья, операционный усилитель (9). К первому выходу генератора мощности подключен пассивный электрод, датчик тока, вход которого подключен ко второму выходу генератора мощности. Первый выход датчика тока соединен с активным электродом. Вход датчика напряжения подключен к первому выходу датчика тока. Входы перемножителя высокочастотных сигналов соответственно подключены ко второму выходу датчика тока и выходу датчика напряжения. Вход первого инерционного апериодического звена соединен с выходом перемножителя высокочастотных сигналов. К инвертирующему входу операционного усилителя подключен выход первого инерционного апериодического звена, а к неинвертирующему входу подключен формирователь напряжения. Вход второго инерционного апериодического звена соединен с выходом операционного усилителя, а выход подключен к управляющему входу импульсного регулируемого блока питания. Достигается повышение точности поддержания температуры в рабочей зоне биологической ткани в широком диапазоне изменения её электрического сопротивления, упрощение конструкции. 1 ил.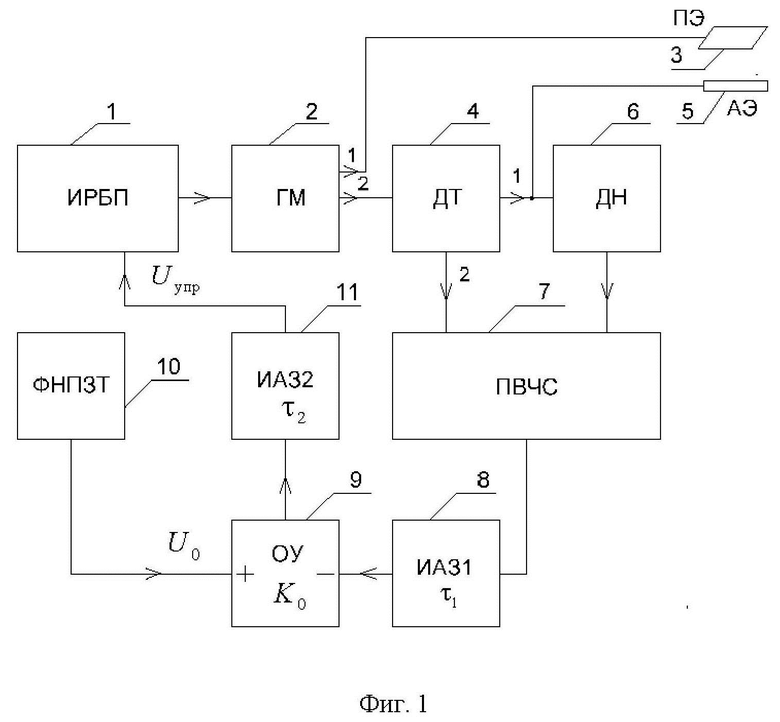
Электрохирургический генератор, содержащий импульсный регулируемый блок питания с управляющим входом, выход которого соединен с генератором мощности, имеющим два выхода, при этом к первому выходу подключен пассивный электрод, датчик тока, вход которого подключен ко второму выходу генератора мощности, при этом первый выход датчика тока соединен с активным электродом, формирователь напряжения, пропорционального задаваемой температуре, отличающийся тем, что в него введены датчик напряжения, вход которого подключен к первому выходу датчика тока, перемножитель высокочастотных сигналов, входы которого соответственно подключены ко второму выходу датчика тока и выходу датчика напряжения, первое инерционное апериодическое звено, вход которого соединен с выходом перемножителя высокочастотных сигналов, операционный усилитель, к инвертирующему входу которого подключен выход первого инерционного апериодического звена, а к неинвертирующему входу подключен формирователь напряжения, пропорционального задаваемой температуре, второе инерционное апериодическое звено, вход которого соединен с выходом операционного усилителя, а выход подключен к управляющему входу импульсного регулируемого блока питания.
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ВЫСОКОЧАСТОТНЫЙ | 2000 |
|
RU2166299C1 |
| ЭЛЕКТРОЛИЗЕР ДЛЯ ПОЛУЧЕНИЯ АЛЮ,иИНИЯ | 0 |
|
SU188014A1 |
| Устройство для измерения вибрации металлических поверхностей | 1959 |
|
SU134036A1 |
| US 2020121378 A1, 23.04.2020 | |||
| WO 2023009548 A1, 02.02.2023 | |||
| КАРТРИДЖ ДЛЯ ИСПОЛЬЗОВАНИЯ С УСТРОЙСТВОМ, ГЕНЕРИРУЮЩИМ АЭРОЗОЛЬ, И СИСТЕМА, ГЕНЕРИРУЮЩАЯ АЭРОЗОЛЬ | 2018 |
|
RU2777581C2 |

