Область техники, к которой относится настоящее изобретение
Настоящее изобретение главным образом относится к технологии сжатия облака точек и, в частности, к способу и устройству для кодирования/декодирования геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика.
Предшествующий уровень техники настоящего изобретения
Данный раздел предназначен для знакомства читателя с различными аспектами этой области техники, которые могут быть связаны с различными аспектами, по меньшей мере, одного из пояснительных (иллюстративных) вариантов осуществления настоящего изобретения, которые описаны и/или заявлены ниже. Считается, что это обсуждение будет полезным для предоставления читателю вводной информации для содействия лучшему пониманию различных аспектов настоящего изобретения.
Применяясь в качестве формата для представления трехмерных данных, облака точек в последнее время получили широкое распространение, так как они являются универсальными благодаря своей способности представить все типы физических объектов или сцен. Облака точек можно использовать для различных целей, например, для объектов культурного наследия/зданий, когда объекты, например, статуи или здания, сканируются в трехмерном формате, чтобы поделиться пространственной конфигурацией объекта без его пересылки или его посещения. Также облако точек является способом для обеспечения сохранения знания об объекте в случае, когда он может быть разрушен; например, храм может быть разрушен землетрясением. Такие облака точек обычно являются статическими, цветными и огромными.
Другой областью их использования является топография и картография, когда применение трехмерных представлений позволяет картам не ограничиваться плоскостью, они могут включать в себя рельеф. Карты Google (Google Maps) теперь являются хорошим примером трехмерных карт, но в них используются ячеистые сетки вместо облаков точек. Тем не менее, облака точек могут быть подходящим форматом данных для трехмерных карт, и такие облака точек обычно являются статическими, цветными и огромными.
Миры виртуальной реальности (Virtual Reality - VR), дополненной реальности (Augmented Reality - AR) и полного эффекта присутствия (погружения) недавно стали очень популярной темой, и многие предвидят, что они могут стать будущим плоского двухмерного видео. Основная идея заключается в полном присутствии зрителя в окружающей обстановке, в отличие от стандартного телевидения, которое позволяет зрителю только смотреть на виртуальный мир перед ним. Имеется несколько градаций полного присутствия в зависимости от степени свободы зрителя в окружающей среде. Облако точек является хорошим возможным форматом для распространения миров VR/AR.
Автомобильная отрасль, и, более конкретно, ожидаемые полностью автоматические автомобили также являются областями, в которых облака точек могут широко использоваться. Полностью автоматические автомобили должны быть способны «зондировать» окружающую их обстановку для принятия правильных решений по вождению на основании обнаруженного присутствия и характера расположенных непосредственно поблизости объектов, а также конфигурации дороги.
Облако точек является набором точек, расположенных в трехмерном (3D) пространстве, по мере необходимости с дополнительными значениями, присвоенными каждой точке. Такие дополнительные значения обычно называются атрибутами. Атрибутами могут быть, например, три компонента цвета, материальные свойства, например, отражательная способность и/или двухкомпонентные векторы, которые перпендикулярны к поверхности, ассоциированной с точкой.
Таким образом, облако точек является комбинацией геометрических данных (расположение точек в трехмерном пространстве обычно описывается с помощью трехмерных декартовых координат х, у и z) и атрибутов.
Облака точек могут быть обнаружены с помощью различного типа устройств, например, массива камер, датчиков глубины, лазеров (для обнаружения света и определения дальности, также называются лидарами или лазерными радарами), радарами, или они могут быть созданы компьютером (например, в монтажно-тонировочном периоде создания кинофильма). В зависимости от области применения облака точек могут содержать от тысяч до миллиардов точек для картографических применений. Для необработанного представления облаков точек требуется очень большое количество битов на точку, при этом нужна, по меньшей мере, дюжина битов на каждую декартову координату х, у или z, и по мере необходимости больше битов для атрибутов, например три раза по 10 битов для компонентов цвета.
Во многих приложениях важно иметь возможность либо пересылать облака точек конечному пользователю, либо хранить их на сервере, потребляя при этом только разумное количество пропускной способности канала связи или объема хранилища данных с обеспечением допустимого (или предпочтительно очень хорошего) качества восприятия. Эффективное сжатие таких облаков точек является ключевым моментом для создания практичной цепочки распространения многих миров полного присутствия.
Сжатие для распространения и для визуализации конечным пользователем, например, с помощью очков AR/VR или другого устройства 3D-визуализации, может быть с потерями (аналогично сжатию видео). В некоторых других областях использования требуется сжатие без потерь, например в медицинских приложениях или в приложениях полностью автоматического вождения автомобиля, чтобы избежать изменения результатов принятие решения при последующем анализе сжатого и переданного облака точек.
До последнего времени технология сжатия облака точек (известная также как технология РСС (Point Cloud Compression - сжатие облака точек)) не применялась на массовом рынке и не было доступно никакого стандартного кодека для облака точек. В 2017 г. рабочая группа по стандартизации ISO/JCT1/SC29/WG11, известная также как группа экспертов по движущимся изображениям (Moving Picture Experts Group - MPEG), инициировала работы по сжатию облака точек. Эти работы привели к созданию двух стандартов, а именно:
• MPEG-I часть 5 (ISO/IEC 23090-5) или сжатие облака точек на основе видео (V-PCC)
• MPEG-I часть 9 (ISO/IEC 23090-9) или сжатие облака точек на основе геометрии (G-PCC)
При использовании метода кодирования V-PCC облако точек сжимается с помощью выполнения многочисленных проекций трехмерного объекта для получения двухмерных участков, которые упаковываются в изображение (или в видео при работе с динамическими облаками точек). Полученные изображения или видео затем сжимаются с использованием уже существующих кодеков для изображения/видео, что позволяет получить преимущество от использования уже разработанных решений для изображений и видео. В силу своего характера метод сжатия V-PCC эффективен только для плотных и непрерывных облаков точек, так как кодеки изображения/видео не могут сжимать негладкие участки, полученные при проекции, например, обнаруженных с помощью лидара разреженных геометрических данных.
В методе кодирования G-PCC имеются две схемы для сжатия обнаруженных разреженных геометрических данных.
Первая схема основана на дереве заполненности, которое может локально быть любым типом дерева из октадерева, квадрадерева и двоичного дерева, которое представляет геометрию облака точек. Заполненные узлы (то есть узлы, ассоциированные с кубом/кубоидом, содержащим, по меньшей мере, одну точку облака точек) разделяются вниз до достижения определенного размера, и заполненные листы узлов дерева содержат трехмерные координаты точек, обычно в центре таких узлов. Информация о заполненности передается данными заполненности (двоичные данные, флаги), сигнализирующими состояние заполненности для каждого из дочерних узлов разных узлов. При использовании методов прогнозирования на основе ближайших соседей можно получить высокий уровень сжатия данных заполненности для плотных облаков точек. Облака разреженных точек можно также обрабатывать с помощью прямого кодирования положения точки внутри узла с не минимальным размером, с помощью остановки при построении дерева, когда в узле присутствуют только изолированные точки; этот метод известен как режим прямого кодирования (Direct Coding Mode - DCM).
Вторая схема основана на прогнозном дереве, в котором каждый узел представляет трехмерные координаты одной точки, а взаимосвязь родительский/дочерний между узлами представляет собой пространственное предсказание от родителя к дочерям. Этот метод может работать только с облаками разреженных точек и обеспечивает преимущество более низкой задержки и более простого декодирования, чем у метода с деревом заполненности. Однако эффективность сжатия лишь незначительно лучше, и кодирование является более сложным, чем в первом методе на основании заполненности, так как кодер во время построения прогнозного дерева должен активно искать наилучшего предиктора (в длинном списке возможных предикторов).
В обеих схемах (де)кодирование атрибута выполняется после полного (де)кодирования геометрии, что на практике приводит к двухпроходному кодированию. Таким образом, совместная низкая задержка геометрии/атрибута получается при использовании слайсов, которые разбирают трехмерное пространство на ячейки, которые кодируются независимо, без использования предсказаний между ячейками. Это может значительно повлиять на эффективность сжатия в случае использования многих слайсов.
Выполнение объединенных вместе требований к простоте кодера или декодера, к низкой задержке и к эффективности сжатия все еще является проблемой, которая не была удовлетворительно решена в имеющихся кодеках облака точек.
Важной областью применения является передача разреженных геометрических данных, обнаруженных с помощью, по меньшей мере, одного датчика, установленного на подвижном транспортном средстве. Для этого обычно требуется простой бортовой кодер с низкой задержкой. Простота необходима, потому что кодер скорее всего будет реализован с помощью вычислительных блоков, которые одновременно выполняют другую обработку данных, например, для (полу)автоматического вождения транспортного средства, что ограничивает вычислительные мощности, доступные для кодера облака точек. Низкая задержка также необходима, чтобы обеспечить быструю передачу данных из автомобиля в облако, для получения в реальном времени обзора местного дорожного движения на основании сбора данных с нескольких транспортных средств, и быстрого принятия адекватного решения на основании информации о дорожном движении. В то время как задержка передачи данных может быть низкой благодаря использованию систем связи пятого поколения 5G, сам кодер не должен вносить слишком большую задержку из-за процесса кодирования. Также чрезвычайно важна высокая эффективность сжатия, так как ожидается очень тяжелый поток данных в облако от миллионов автомобилей.
Конкретная априорная информация, связанная с обнаруженными с помощью вращающегося лидара разреженными геометрическими данными, уже использовались в методе G-PCC и привела к очень значительному выигрышу в сжатии.
Например, в методе G-PCC используется угол наклона (относительно горизонтальной поверхности грунта) датчика при обнаружении данных вращающейся головкой 10 с лидаром, как показано на фиг. 1 и 2. Головка 10 с лидаром содержит набор датчиков 11 (например, лазеров), здесь показаны пять датчиков. Вращающаяся головка 10 с лидаром может вращаться вокруг вертикальной оси z для обнаружения геометрических данных физического объекта. Обнаруженные лидаром геометрические данные затем представляются в сферических координатах  где
где  является расстоянием точки Р от центра вращающейся головкой с лидаром, ф является азимутальным углом поворота вращающейся головки с лидаром относительно опорного направления, а θ является углом наклона датчика с индексом k вращающейся головки 10 с лидаром относительно опорной горизонтальной плоскости.
является расстоянием точки Р от центра вращающейся головкой с лидаром, ф является азимутальным углом поворота вращающейся головки с лидаром относительно опорного направления, а θ является углом наклона датчика с индексом k вращающейся головки 10 с лидаром относительно опорной горизонтальной плоскости.
Регулярное распределение точек по азимутальному углу наблюдалось для обнаруженных лидаром геометрических данных, как показано на фиг. 3. Такая регулярность используется в методе G-PCC для получения квазиодномерного представления облака точек, в котором, с точностью до шумов, только радиус r3D принадлежит к величинам, принимающим любые значения в диапазоне изменения, в то время как углы ф и θ принимают только дискретные величины значений  до I - 1, где I является количеством азимутальных углов, используемым для обнаружения точек, и
до I - 1, где I является количеством азимутальных углов, используемым для обнаружения точек, и  до J - 1, где J является количеством датчиков во вращающейся головке 10 с лидаром. В основном метод G-PCC представляет обнаруженные лидаром разреженные геометрические данные в двумерном пространстве с (дискретными) значениями угловых координат (ф, θ), как показано на фиг. 3, вместе со значением радиуса
до J - 1, где J является количеством датчиков во вращающейся головке 10 с лидаром. В основном метод G-PCC представляет обнаруженные лидаром разреженные геометрические данные в двумерном пространстве с (дискретными) значениями угловых координат (ф, θ), как показано на фиг. 3, вместе со значением радиуса  для каждой точки.
для каждой точки.
Такое квазиодномерное свойство было использовано в методе G-PCC, как в дереве заполненности, так и в прогнозном дереве, за счет предсказания в сферическом координатном пространстве расположения текущей точки на основании уже закодированной точки при использовании дискретного характера улов.
Более точно можно сказать, что дерево заполненности интенсивно использует режим DCM и энтропийно кодирует непосредственные места расположения точек внутри узла с помощью контекстно-адаптивного энтропийного кодера. Затем контексты получаются из местного преобразования мест расположения точек в угловые координаты (ф, θ) и из расположения этих угловых координат относительно дискретных угловых координат (фi, θj), полученных из предыдущих уже закодированных точек. Прогнозное дерево прямо кодирует первый вариант расположения точки в сферических координатах (r2D, ф, θ), где r2D является спроецированным на горизонтальную плоскость ху радиусом, как показано на фиг. 4, с использованием квазиодномерного характера (r2D, фi, θj) этого углового координатного пространства. Затем сферические координаты (r2D, ф, θ) преобразуются в трехмерные декартовые координаты (x, y, z) и невязка xyz кодируется для обработки ошибок при преобразовании координат, приближений для углов наклона и азимутальных углов и возможного шума.
В методе G-PCC используется априорная информация об углах для лучшего сжатия обнаруженных лидаром разреженных геометрических данных, но структура кодирования не адаптируется к порядку обнаружения. По самой своей природе дерево заполненности должно быть полностью закодировано на всю свою высоту перед выводом точки. Эти данные заполненности кодируются в так называемом порядке по расширению: сначала кодируются данные заполненности корневого узла, указывающего на свои заполненные дочерние узлы; затем кодируются данные заполненности для каждого из заполненных дочерних узлов, указывающих на свои заполненные дочерние узлы следующего уровня; и так далее итеративно по высоте дерева до тех пор, пока не будет возможно определить концевые узлы листов, и тогда соответствующие точки предоставляются/выводятся в приложение или в схему кодирования атрибутов. Что касается прогнозного дерева, кодер может произвольно выбирать порядок точек в дереве, но для получения хорошей эффективности сжатия и оптимизации точности прогнозирования в методе G-PCC предлагается кодировать одно дерево на каждый датчик. Это имеет в основном тот же самый недостаток, что и использование одного слайса кодирования на датчик, то есть неоптимальная эффективность сжатия, поскольку прогнозирование между датчиками не допускается и не обеспечивает низкую задержку кодера. Хуже того, на каждый датчик должна быть одна обработка кодирования, а количество основных единиц кодирования должно равняться количеству датчиков; а это непрактично.
В кратком изложении, в структуре вращающейся головки с датчиками, используемой для обнаружения разреженных геометрических данных облака точек, в предшествующем уровне техники для кодирования и декодирования не решена проблема объединения простоты, низкой задержки и эффективности сжатия.
Более того, обнаружение разреженных геометрических данных облака точек с помощью вращающейся головки с датчиками имеет некоторые недостатки, и могут использоваться другие типы головок с датчиками.
Механические части, обеспечивающие вращение (поворот) вращающейся головки с датчиками, склонны к поломке и являются дорогостоящими. Также в силу своей конструкции угол поля зрения обязательно равен 2π. Это не позволяет обнаруживать определенную интересующую область с высокой частотой, например, может быть более интересно обнаруживать область перед транспортным средством, чем позади его. Практически в большинстве случаев, когда датчик установлен на транспортном средстве, большая часть угла 2π всего поля зрения закрывается самим транспортным средством, и в такой перекрытой части поля зрения не нужно проводить обнаружение точек.
Недавно появились новые типы датчиков, позволяющие более гибко выбирать область обнаружения. В самых последних разработках датчик можно более свободно перемещать с помощью электроники (что позволяет избежать хрупких механических частей), чтобы получить большое разнообразие путей обнаружение в трехмерной сцене, как показано на фиг. 5. На фиг. 5 показан набор из четырех датчиков. Их относительные направления обнаружения, то есть азимутальный угол и угол наклона, зафиксированы относительно друг друга, однако в целом они обнаруживают сцену, следуя по программируемому пути обнаружения, изображенному пунктирными линиями в двумерном угловом координатном (ф, θ) пространстве. Теперь точки облака точек можно регулярно обнаруживать по пути обнаружения. Некоторые головки с датчиками также могут адаптировать свою частоту обнаружения, увеличивая частоту обнаружения после нахождения интересующей области R, как показано на фиг. 6. Такая интересующая область R может быть связана с близким объектом, движущимся объектом или любым объектом (пешеходом, другим транспортным средством и т.д.), предварительно сегментированным, например, в предыдущем кадре, или динамически сегментированным во время обнаружения. На фиг. 7 схематически показан другой пример пути обнаружения (типичный зигзагообразный путь обнаружения), используемого головкой с датчиками, содержащей два датчика, способных увеличивать свои частоты обнаружения после нахождения интересующей области (затененные серые кружки и серые заштрихованные кружки). Использование зигзагообразного пути обнаружения может быть выгодно использовано для обнаружения ограниченного (по азимуту) углового сектора трехмерной сцены. Поскольку датчики могут быть установлены на транспортном средстве, их окна обзора интересующей области обязательно ограничены присутствием самого транспортного средства, которое загораживает сцену, если только датчики не расположены в верхней части автомобиля. Следовательно, датчики с ограниченным угловым сектором зондирования представляют большой интерес, и их легче установить на транспортном средстве.
Как показано на фиг. 8, головка с датчиком, содержащая один датчик, также может использоваться для обнаружения нескольких положений (два вертикальных положения на фиг. 8), например, благодаря использованию отражений от зеркал, колеблющихся при вращении (в данном случае вращение вокруг вертикальной оси). В этом случае вместо использования набора датчиков используется один датчик в разных угловых положениях (то есть с разным углом наклона на фиг. 8) вдоль пути обнаружения (здесь зигзагообразный путь обнаружения), имитируя обнаружение с использованием набора нескольких датчиков.
В целях простоты дальнейшего изложения в следующих описаниях и в формуле изобретения «головка с датчиками» может относиться к набору физических датчиков или к набору индексов углов наклона при обнаружении, который также имитирует набор датчиков. Кроме того, специалист в данной области техники поймет, что термин «датчик» может также относиться к датчику при каждом значении угла наклона обнаружения.
Выполнение объединенных вместе требований к простоте кодера и декодера, низкой задержке и высокой эффективности сжатия облака точек, обнаруживаемых датчиками любого типа, по-прежнему остается проблемой, которая не была удовлетворительно решена с помощью существующих кодеков облака точек.
С учетом вышеизложенного был разработан, по меньшей мере, один пояснительный (иллюстративный) вариант осуществления настоящего изобретения.
Краткое описание настоящего изобретения
В следующем разделе представлено упрощенное краткое описание, по меньшей мере, одного пояснительного (иллюстративного) варианта осуществления настоящего изобретения для получения базового понимания некоторых аспектов настоящего изобретения. Это краткое раскрытие не является подробным обзором пояснительного (иллюстративного) варианта осуществления настоящего изобретения. Оно не предназначено для идентификации основных или важных элементов варианта осуществления. Представленное ниже краткое раскрытие просто описывает некоторые аспекты, по меньшей мере, одного из пояснительных (иллюстративных) вариантов осуществления настоящего изобретения в упрощенной форме в качестве введения к более подробному описанию, которое представлено далее в настоящем документе.
Согласно первому аспекту настоящего изобретения в нем предложен способ кодирования в битовый поток геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика, ассоциированного с индексом датчика, причем вышеупомянутые геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве, каждая заполненная точка грубого приближения располагается в двумерном пространстве с помощью индекса датчика, ассоциированного с датчиком, который обнаружил точку облака точек, ассоциированную с вышеупомянутой заполненной точкой грубого приближения, и индексом выборки, ассоциированным с моментом времени обнаружения, в котором точка облака точек была обнаружена, причем каждая заполненная точка грубого приближения ассоциирована с радиусом, основанном на расстоянии точки облака точек от опорной точки. Способ предусматривает следующие стадии: получение списка возможных радиусов для первой заполненной точки грубого приближения, имеющей первый индекс датчика, первый индекс выборки, и которая ассоциирована с первым радиусом, этот список возможных радиусов содержит, по меньшей мере, один второй радиус, ассоциированный, по меньшей мере, с одной второй заполненной точкой грубого приближения, у которой индекс второго датчика отличается от индекса первого датчика и у которой индекс второй выборки не превышает индекса первой выборки, причем вышеупомянутая, по меньшей мере, одна вторая заполненная точка грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с вышеупомянутой, по меньшей мере, одной второй заполненной точкой грубого приближения, вероятно, снижает динамический диапазон невязки (rres) предсказываемого радиуса, когда первый радиус предиктивно кодируется; выбор для первой заполненной точки грубого приближения выбираемого предсказываемого радиуса из списка возможных радиусов; кодирование в битовый поток данных, показывающих выбранный предсказываемый радиус в списке возможных радиусов; и предиктивное кодирование в битовый поток невязки радиуса между первым радиусом и выбранным предсказываемым радиусом.
Согласно второму аспекту настоящего изобретения в нем предложен способ декодирования из битового потока геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика, ассоциированного с индексом датчика, причем вышеупомянутые геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве, каждая заполненная точка грубого приближения располагается в двумерном пространстве с помощью индекса датчика, ассоциированного с датчиком, который обнаружил точку облака точек, ассоциированную с вышеупомянутой заполненной точкой грубого приближения, и индекса выборки, ассоциированным с моментом времени обнаружения, в котором точка облака точек была обнаружена, причем каждая заполненная точка грубого приближения ассоциирована с радиусом, основанном на расстоянии точки облака точек от опорной точки. Способ предусматривает следующие стадии: получение списка возможных радиусов для первой заполненной точки грубого приближения, имеющей первый индекс датчика и первый индекс выборки, и которая ассоциирована с первым радиусом, этот список возможных радиусов содержит, по меньшей мере, один второй радиус, ассоциированный, по меньшей мере, с одной второй заполненной точкой грубого приближения, у которой индекс второго датчика отличается от индекса первого датчика и у которой индекс второй выборки меньше индекса первой выборки, причем вышеупомянутая, по меньшей мере, одна вторая заполненная точка грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с вышеупомянутой, по меньшей мере, одной второй заполненной точкой грубого приближения, является многообещающим для уменьшения динамического диапазона невязки предсказываемого радиуса, когда первый радиус предиктивно закодирован; декодирование из битового потока для первой заполненной точки грубого приближения данных, представляющих выбранный предсказываемый радиус в списке возможных радиусов; декодирование из битового потока для первой заполненной точки грубого приближения невязки радиуса; и получение радиуса, ассоциированного с точкой из облака точек, представленной первой заполненной точки грубого приближения, на основании невязки радиуса и выбранного предсказываемого радиуса, полученного из данных и списка возможных радиусов.
Согласно одному пояснительному (иллюстративному) варианту осуществления список возможных радиусов дополнительно содержит, по меньшей мере, один третий радиус, ассоциированный с, по меньшей мере, одной третьей заполненной точкой грубого приближения, у которой индекс третьего датчика равен индексу первого датчика, и индекс третьей выборки не больше индекса первой выборки.
Согласно одному пояснительному (иллюстративному) варианту осуществления условие приемлемости основано на сравнении между индексом второй выборки второй заполненной точки грубого приближения и индексом третьей выборки третьей заполненной точки грубого приближения.
Согласно одному пояснительному (иллюстративному) варианту осуществления условие приемлемости удовлетворяется второй заполненной точкой грубого приближения, когда индекс второй выборки больше, чем индекс третьей выборки.
Согласно одному пояснительному (иллюстративному) варианту осуществления условие приемлемости основано на сравнении азимутальных углов, ассоциированных с датчиками, используемыми для обнаружения точек облака точек, ассоциированных с заполненными первой, второй и третьей точками грубого приближения.
Согласно одному пояснительному (иллюстративному) варианту осуществления условие приемлемости удовлетворяется второй заполненной точкой грубого приближения, когда первая разность азимутальных углов меньше, чем вторая разность азимутальных углов, причем первая разность азимутальных углов является разностью между первым азимутальным углом, ассоциированным с первой заполненной точкой грубого приближения, и вторым азимутальным углом, ассоциированным со второй заполненной точкой грубого приближения, а вторая разность азимутальных углов является разностью между первым азимутальным углом, ассоциированным с первой заполненной точкой грубого приближения, и третьим азимутальным углом, ассоциированным с третьей заполненной точкой грубого приближения.
Согласно одному пояснительному (иллюстративному) варианту осуществления условие приемлемости удовлетворяется второй заполненной точкой грубого приближения, когда расстояние больше порогового значения, причем расстояние вычисляется между вторым радиусом, ассоциированным со второй заполненной точкой грубого приближения, и третьим радиусом, ассоциированным с третьей заполненной точкой грубого приближения, у которой индекс третьего датчика равен индексу первого датчика, и индекс третьей выборки не больше индекса первой выборки, причем пороговое значение основано на предыдущей закодированной или декодированной невязке радиуса, ассоциированной с заполненными точками грубого приближения, у которых индекс датчика равен индексу первого датчика.
Согласно одному пояснительному (иллюстративному) варианту осуществления условие приемлемости удовлетворяется второй заполненной точкой грубого приближения, когда отношение градиента радиуса к градиенту индексов выборки, оцененное из, по меньшей мере, двух предыдущих закодированных или декодированных вторых заполненных точек грубого приближения, больше, чем пороговое значение.
Согласно третьему аспекту настоящего изобретения в нем предложено устройство для кодирования в битовый поток геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика, ассоциированного с индексом датчика, причем вышеупомянутые геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве. Устройство содержит в своем составе один или несколько процессоров, выполненных с возможностью реализовать способ согласно первому аспекту настоящего изобретения.
Согласно четвертому аспекту настоящего изобретения в нем предложено устройство для декодирования из битового потока геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика, ассоциированного с индексом датчика, причем вышеупомянутые геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве. Устройство содержит в своем составе один или несколько процессоров, выполненных с возможностью реализовать способ согласно второму аспекту настоящего изобретения.
Согласно пятому аспекту настоящего изобретения в нем предложен продукт в виде компьютерной программы, содержащей команды, такие, что при выполнении программы одним или несколькими процессорами один или несколько процессоров заставлены реализовать способ согласно первому аспекту настоящего изобретения.
Согласно шестому аспекту настоящего изобретения в нем предложен долговременный носитель данных, на котором хранятся команды кода программы для реализации способа согласно первому аспекту настоящего изобретения.
Согласно седьмому аспекту настоящего изобретения в нем предложен продукт в виде компьютерной программы, содержащей команды, такие, что при выполнении программы одним или несколькими процессорами один или несколько процессоров заставлены реализовать способ согласно второму аспекту настоящего изобретения.
Согласно восьмому аспекту настоящего изобретения в нем предложен долговременный носитель данных, на котором хранятся команды кода программы для реализации способа согласно второму аспекту настоящего изобретения.
Конкретный характер, по меньшей мере, одного из пояснительных (иллюстративных) вариантов осуществления, также как других объектов, преимуществ, особенностей и применений вышеупомянутого, по меньшей мере, одного из пояснительных (иллюстративных) вариантов осуществления станет очевидным из последующего описания примеров, рассматриваемых совместно с прилагаемыми фигурами.
Краткое описание фигур
В настоящем документе будут сделаны ссылки, в качестве примера, на прилагаемые фигуры, на которых показаны пояснительные (иллюстративные) варианты осуществления настоящего изобретения, причем:
На фиг. 1 схематически показан вид сбоку на головку с датчиками и некоторые из их параметров согласно предшествующему уровню техники;
На фиг. 2 схематически показан вид сверху на головку с датчиками и некоторые из их параметров согласно предшествующему уровню техники;
На фиг. 3 схематически показано регулярное распределение точек, обнаруживаемых вращающейся головкой с датчиками согласно предшествующему уровню техники;
На фиг. 4 схематически показано представление точки облака точек в трехмерном пространстве согласно предшествующему уровню техники;
На фиг. 5 схематически показан пример головки с датчиками, способной обнаружить реальную сцену, следуя по программируемому пути обнаружения согласно предшествующему уровню техники;
На фиг. 6 схематически показан пример головки с датчиками, способной обнаружить реальную сцену, следуя по программируемому пути обнаружения с использованием различных частот обнаружения согласно предшествующему уровню техники;
На фиг. 7 схематически показан пример головки с датчиками, способной обнаружить реальную сцену, следуя по программируемому зигзагообразного пути обнаружения с использованием различных частот обнаружения согласно предшествующему уровню техники;
На фиг. 8 схематически показан пример головки с единственным датчиком, способной обнаружить реальную сцену, следуя по программируемому зигзагообразного пути обнаружения согласно различным частотам обнаружения;
На фиг. 9 схематически показаны упорядоченные точки грубого приближения представления грубого приближения согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления;
На фиг. 10 схематически показан пример упорядочивания точек грубого приближения согласно одному пояснительному (иллюстративному) варианту осуществления;
На фиг. 11 схематически показано представление упорядоченных точек грубого приближения в двумерном координатном (s, λ) пространстве;
На фиг. 12 схематически показаны упорядоченные точки грубого приближения представления грубого приближения согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления;
На фиг. 13 схематически показаны датчики, обнаруживающие точки на дороге, переведенные на горизонтальную плоскость;
На фиг. 14 схематически показан датчик, обнаруживающий точки на дороге вместе с объектом;
На фиг. 15 схематически показан предсказываемый радиус, когда происходит скачкообразное изменение радиуса от старого объекта на новый объект согласно предшествующему уровню техники;
На фиг. 16 схематически показан предсказываемый радиус от другого датчика, когда происходит скачкообразное изменение радиуса от старого объекта к новому объекту согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления;
На фиг. 17 схематически показана блок-схема стадий способа 100 кодирования геометрических данных облака точек в битовый поток закодированных данных облака точек согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления;
На фиг. 18 схематически показана блок-схема стадий способа 200 декодирования геометрических данных облака точек из битового потока закодированных данных облака точек согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления;
На фиг. 19 схематически показан пример точек грубого приближения, принадлежащих окрестности первой заполненной точки грубого приближения согласно одному пояснительному (иллюстративному) варианту осуществления;
На фиг. 20 схематически показан пример точек грубого приближения, принадлежащих окрестности первой заполненной точки грубого приближения согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200;
На фиг. 21 схематически показан пример точек грубого приближения, принадлежащих окрестности первой заполненной точки грубого приближения согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200;
На фиг. 22 схематически показан пример точек грубого приближения, принадлежащих окрестности первой заполненной точки грубого приближения согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200;
На фиг. 23 схематически показан пример точек грубого приближения, принадлежащих окрестности первой заполненной точки грубого приближения согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200;
На фиг. 24 схематически показан пример точек грубого приближения, принадлежащих окрестности первой заполненной точки грубого приближения согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200;
На фиг. 25 схематически показана блок-схема стадий варианта способа 100, показанного на фиг. 17;
На фиг. 26 схематически показана блок-схема стадий одного варианта способа 200 показанного на фиг. 18;
На фиг. 27 схематически показан пример точек грубого приближения, принадлежащих окрестности первой заполненной точки грубого приближения согласно одному варианту способов 100 и 200;
На фиг. 28 схематически показано кодирование/декодирование индекса предиктора согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления; и
На фиг. 29 в виде блок-схемы схематически показан пример системы, в которой реализованы различные аспекты и пояснительные (иллюстративные) варианты осуществления.
Подобные ссылочные номера, которые могут использоваться на различных фигурах, обозначают подобные компоненты.
Описание пояснительных (иллюстративных) вариантов осуществления
По меньшей мере, один из пояснительных (иллюстративных) вариантов осуществления более подробно описан ниже со ссылками на сопровождающие фигуры, на которых показаны примеры, по меньшей мере, одного из пояснительных (иллюстративных) вариантов осуществления. Пояснительный (иллюстративный) вариант осуществления может, однако, быть реализован во многих альтернативных формах, и не следует истолковывать, что они ограничены изложенными ниже примерами. Соответственно, следует понимать, что нет никакого намерения ограничить пояснительные (иллюстративные) варианты осуществления конкретными раскрытыми формами. Наоборот, намерение раскрытия заключается в охвате всех модификаций, эквивалентов и альтернатив, находящихся в пределах сущности и объема настоящего изобретения.
По меньшей мере, один из аспектов главным образом связан с кодированием и декодированием облака точек, и, по меньшей мере, один другой аспект главным образом связан с передачей битового потока, созданного или закодированного, и еще один другой аспект связан с приемом/обращением к декодированному потоку битов.
Более того, представленные аспекты не ограничены стандартами MPEG, в частности, частью 5 или частью 9 стандарта MPEG-I, которые относятся к сжатию облака точек, и могут применяться, например, для других стандартов и рекомендаций, как уже существующих, так и разрабатываемых для будущего, и для расширений любых таких стандартов и рекомендации (включая часть 5 и часть 9 стандарта MPEG-I). Если не оговорено иное, или это технически не исключено, описанные в настоящем документе аспекты можно использовать по отдельности или в комбинации.
Настоящее изобретение относится к кодированию/декодированию геометрических данных облака точек, представленных упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве.
Например, в рабочей группе ISO/IEC JTC 1/SC 29/WG 7 по трехмерному кодирования графики группа экспертов по движущимся изображениям (MPEG) обсуждает новый кодек с названием L3C2 (кодек с низкой задержкой и низкой сложностью (Low-Latency Low-Complexity Codec)), который должен улучшить, в сравнении с кодеком G-РСС, эффективность кодирования обнаруженных лидаром облаков точек. Кодек L3C2 предоставляет пример двухмерного представления точек облака точек, а именно точками грубого приближения. Описание кода можно найти в опубликованным документе рабочей группы в N00167, ISO/IEC JTC 1/SC 29/WG 7, MPEG 3D Graphics Coding, «Рассматриваемые технологии в G-PCC», 31 августа 2021 г.
По сути, для каждой обнаруженной точки Pn облака точек, индекс λn датчика, ассоциированный с датчиком, который обнаружил точку Pn, и азимутальный угол фn, представляющий угол обнаружения вышеупомянутого датчика, получаются при преобразовании трехмерных декартовых координат (xn, yn, zn), указывающих трехмерное расположение обнаруженной точки Pn. Точки облака точек затем упорядочиваются на основании азимутальных углов фn и индексов датчиков λn, например, в лексикографическом порядке, сначала по азимутальному углу, и потом по индексу датчика. Порядковый индекс о(Pn) точки Pn затем получается по формуле:
где K обозначает количество датчиков.
На фиг. 9 схематически показаны упорядоченные точки грубого приближения представления грубого приближения. Были обнаружены пять точек из облака точек. Каждая из этих пяти точек грубо представлена точкой грубого приближения (черным кружком) в представлении грубого приближения: две точки Pn и Pn+1 грубого приближения представляют две точки облака точек, обнаруженные в момент времени t1 при азимутальном угле фс (среди нескольких фi), и три точки грубого приближения представляют три точки облака точек, обнаруженные в момент времени t2 при азимутальном угле фс+Δф. Точка грубого приближения, которая представляет обнаруженную точку облака точек, является, более конкретно, заполненной точкой грубого приближения, а точка грубого приближения, которая не представляет обнаруженную точку облака точек, является, более конкретно, незаполненной точкой грубого приближения. Поскольку точки облака точек представлены заполненными точками грубого приближения в представлении грубого приближения, порядковые индексы, ассоциированные с точками облака точек, также являются порядковыми индексами, ассоциированными с заполненными точками грубого приближения.
Затем представление грубого приближения геометрических данных облака точек может быть определено в двумерном координатном (ф, λ) пространстве.
Представление грубого приближения может также быть определено для любого типа головок с датчиками, включая вращающиеся (поворотные) или невращающиеся головки с датчиками. Такое определение основано на пути обнаружения, определенном по характеристикам датчика в двумерном угловом координатном (ф, θ) пространстве, содержащим азимутальную координату ф, представляющую азимутальный угол, соответствующий углу обнаружения датчика относительно опорного направления, и угол наклона θ, представляющий угол наклона датчика относительно горизонтальной опорной плоскости. Путь обнаружения используется для обнаружения точек облака точек согласно упорядоченным точкам грубого приближения, которые представляют возможные расположения обнаруженных точек облака точек. Каждая точка грубого приближения определяется из одного индекса s выборки, ассоциированного с моментом времени обнаружения по пути обнаружения, и с одним индексом λ датчика, ассоциированным с датчиком.
На фиг. 10 показана головка с датчиками, содержащая два датчика. Пути обнаружения, по которым следуют два датчика, показаны пунктирными линиями. Для каждого индекса s выборки (каждого момента времени обнаружения) определяются две точки грубого приближения. Точки грубого приближения, ассоциированные с первым датчиком, показаны на фиг. 10 закрашенными черным цветом кружками, а точки грубого приближения, ассоциированные со вторым датчиком, показаны заштрихованными черным цветом кружками. Каждая из этих двух точек грубого приближения принадлежит пути обнаружении датчика (пунктирной линии), определенной из пути обнаружения SP. На фиг. 11 схематически показано представление упорядоченных точек грубого приближения в двумерном координатном (s, λ) пространстве. Стрелки на фиг. 10 и 11 показывают связи между двумя последовательными упорядоченными точками грубого приближения.
Порядковый индекс о(Р) ассоциирован с каждой точкой грубого приближения согласно рангу вышеупомянутой точки грубого приближения среди упорядоченных точек грубого приближения:
где K обозначает количество датчиков в наборе датчиков или количество различных положений единственного датчика для того же самого индекса выборки, λ обозначает индекс датчика того датчика, который обнаружил точку Р облака точек в момент s времени обнаружения.
На фиг. 12 показаны упорядоченные точки грубого приближения представления грубого приближения, там показаны пять заполненных точек грубого приближения (черные кружки): две точки Pn и Pn+1 грубого приближения заполнены двумя точками облака точек, обнаруженными в момент времени обнаружения t1 (соответствует индексу s1 выборки), и три точки грубого приближения заполнены тремя точками облака точек, обнаруженными в момент времени обнаружения t1 (соответствует индексу s2 выборки).
Затем представление грубого приближения геометрических данных облака точек может быть определено в двумерном координатном (s, λ) пространстве.
Получив порядковый индекс о(Р1) первой точки грубого приближения, заполненной первой обнаруженной точкой облака точек, и разницу Δо порядков, можно рекурсивно восстановить порядковый индекс о(Р) любой заполненной точки грубого приближения, заполненной обнаруженной точкой Р облака точек, по формуле:

Кодирование/декодирование геометрии облака точек содержит в себе кодирование/декодирование радиуса для каждой точки облака точек. Радиус, ассоциированный с точкой облака точек, является радиусом r2D, равным проекции радиуса r3D на горизонтальную плоскость ху, как показано на фиг. 4. Далее в настоящем описании радиус представляет собой проекцию трехмерного радиуса, ассоциированного с точкой облака точек.
Ниже в описании настоящее изобретение описано при рассмотрении представления грубого приближения, определенного в двумерном координатном (s, λ) пространстве. Но то же самое может также быть описано для представления грубого приближения, определенного в двумерном координатном (ф, λ) пространстве, так как вращающаяся головка с датчиками, в частности, головка с лидаром, предоставляет конкретное представление грубого приближения, определенное в двумерном координатном (s, λ) пространстве, в котором в каждый момент времени обнаружения датчики головки с датчиками зондируют объект, и обнаруженные точки соответствуют заполненным точкам грубого приближения такого представления.
Как обсуждалось выше, геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном координатном (s, λ) пространстве. Затем каждая заполненная точка грубого приближения размещается в двумерном координатном (s, λ) пространстве с помощью индекса датчика, ассоциированного с датчиком, который обнаружил точку облака точек, ассоциированную с вышеупомянутой заполненной точкой грубого приближения, и индексом выборки, ассоциированным с моментом времени обнаружения, в котором точка облака точек была обнаружена. Каждая заполненная точка грубого приближения облака точек рассматривается как являющаяся первой заполненной точкой P1 грубого приближения в способах, которые обсуждаются ниже.
Радиус, ассоциированный с точкой облака точек, также является ассоциированным с заполненной точкой грубого приближения, которая представляет вышеупомянутую точку облака точек в представлении грубого приближения.
Радиус r1 ассоциирован с точкой Р облака точек, представленной первой заполненной точкой P1 в приближении грубого приближения. Первая заполненная точка P1 грубого приближения имеет индекс выборки s1 и индекс λ1 датчика в двумерном координатном (s, λ) пространстве. Радиус r1 обычно не кодируется непосредственно, но вместо него кодируется невязка rres радиуса после ее нахождения по формуле:
где rpred обозначает предсказываемый радиус.
Эффективность кодирования радиуса r1 зависит от качества предсказываемого радиуса rpred, которое определяется для ограничения динамического диапазона невязки радиуса. Для меньшего динамического диапазона невязки радиуса обычно требуется меньше битов для кодирования в битовый поток.
Обычно предсказываемый радиус rpred выбирается из некоторых предыдущих закодированных радиусов, ассоциированных с точками облака точек, обнаруженными тем же самым датчиком, и ассоциированными с индексом датчика, равным индексу λ1 первого датчика. Это обеспечивает хорошую эффективность кодирования, когда радиус r1 незначительно изменяется между двумя последовательными моментами времени обнаружения (например, между индексом s1 выборки и индексом s1-1 выборки).
Это, в частности, справедливо, когда вращающийся датчик зондирует дорогу (вблизи горизонтальной плоскости), как показано на фиг. 13. В этом случае предсказываемый радиус rpred, скорее всего, будет равен ранее закодированному радиусу rpred,1 для того же самого датчика λ1.
Конечно, на дороге могут быть размещены некоторые объекты, как показано на фиг. 14. В этом случае предсказываемый радиус rpred может не быть предыдущим ранее закодированным радиусом rpred,1, но может быть другим предыдущим закодированным радиусом rpred,j, закодированным ранее в более прошлое время (j>1).
По этой причине предсказываемый радиус rpred обычно выбирается из списка радиусов, соответствующих предыдущим закодированным/декодированным радиусам, ассоциированным с точками облака точек, обнаруженными тем же самым датчиком λ1. Такой список радиусов не может обеспечить хороший предсказываемый радиус rpred, когда новый объект обнаруживается в первый раз, то есть когда в списке радиусов нет никаких предыдущих закодированных/декодированных радиусов, ассоциированных с вышеупомянутым новым объектом, принадлежащих к списку радиусов.
Такой случай показан на фиг. 15, на котором принадлежащая новому объекту Onew точка Р прогнозируется с помощью предсказываемой точки Ppred, принадлежащий другому объекту Oold, так как точка Р является первой точкой нового объекта Onew, обнаруженной датчиком λ1. Следовательно, величина предсказываемого радиуса rpred значительно отличается от величины первого радиуса r1, ассоциированного с точкой Р, и динамический диапазон невязки rres радиуса является большим. При кодировании такой невязки радиуса потребляется много пропускной способности сети.
Одна из проблем, которую нужно решить, заключается в улучшении обработки перехода от старого объекта к новому объекту, который приводит к скачкообразному изменению радиуса (на том же самом датчике λ1) и к плохому прогнозированию радиуса. С помощью улучшения прогнозирования можно добиться лучшей эффективности сжатия, так как при этом будет снижаться динамический диапазон подлежащей кодированию невязки rres радиуса.
В кратком изложении, в настоящем изобретении предложено решение этой проблемы с помощью выбора предсказываемого радиуса rpred, ассоциированного с подлежащий кодированию точкой Р облака точек, которая представлена первой заполненной точкой P1 грубого приближения, имеющей индекс λ1 первого датчика и индекс первой выборки в двумерном координатном (s, λ) пространстве, из, по меньшей мере, одного второго радиуса, ассоциированного с, по меньшей мере, одной точкой, обнаруженной датчиками, ассоциированными с индексами датчиков, отличными от индекса λ1 первого датчика, и индексами выборки, которые не больше индекса s1 первой выборки. Вышеупомянутая, по меньшей мере, одна вторая точка облака точек представлена, по меньшей мере, одной второй заполненной точкой грубого приближения в представлении грубого приближения.
Выбор предсказываемого радиуса принадлежащей новому объекту обнаруженной точки из радиусов, ассоциированных с точками, обнаруженными датчиками, ассоциированными с индексом датчика, отличным от индекса первого датчика, обеспечивает лучшее прогнозирование, чем прогнозирование, полученное по радиусам, ассоциированным с точками, обнаруженными датчиком, ассоциированным с индексом датчика, который равен индексу первого датчика.
Например, на фиг. 16 показан пример выбранного предсказываемого радиуса, ассоциированного с предсказываемой точкой Ppred, обнаруженной датчиком, ассоциированным с индексом датчика, отличным от индекса λ1 первого датчика. Здесь невязка радиуса между радиусами, ассоциированными с точками Р и Ppred, имеет меньший динамический диапазон, чем невязка радиуса между радиусами, ассоциированными с точками Р и Ppred, показанными на фиг. 15.
Таким образом, кодирование невязки радиуса улучшено в сравнении с кодированием невязки радиуса, полученной из предсказываемых радиусов, соответствующих предыдущим закодированным/декодированным радиусам, ассоциированным с точками, обнаруженными тем же самым датчиком.
Предсказываемые радиусы ассоциированы с точками, обнаруженными датчиками, у которых индекс датчика отличается от индекса λ1 первого датчика, и такие точки также ассоциированы с индексами выборки, которые не превышают индекса s1 первой выборки, то есть это точки, которые принадлежат причинно обусловленной окрестности точки Р.
Это позволяет как кодеру, так и декодеру получить тот же самый предсказываемый радиус.
На фиг. 17 схематически показана блок-схема стадий способа 100 кодирования геометрических данных облака точек в битовый поток закодированных данных облака точек согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления.
Первая заполненная точка P1 грубого приближения считается находящейся в двумерном координатном (s, λ) пространстве. Первая заполненная точка P1 грубого приближения представляет обнаруженную точку облака точек в приближении грубого приближения. Первая заполненная точка P1 грубого приближения имеет индекс s1 первой выборки и индекс λ1 первого датчика в двумерном координатном (s,) пространстве, и она ассоциирована с первым радиусом r1.
На стадии 110 для первой заполненной точки P1 грубого приближения получается выбранный предсказываемый радиус rpred1 из, по меньшей мере, одного второго радиуса r2, ассоциированного с, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения. У каждой второй заполненной точки Р2 грубого приближения имеются индекс λ2 второго датчика, отличный от индекса λ1 первого датчика, и индекс s2 второй выборки, который не превышает индекса s1 первой выборки.
На фиг. 19 схематически показан пример точек грубого приближения, принадлежащих причинно обусловленной окрестности первой заполненной точки P1 грубого приближения. Незаполненные точки грубого приближения показаны как белые кружки с пунктирной окружностью контура, а серые кружки обозначают заполненные точки грубого приближения.
Участки с серым фоном обозначают группы вторых точек грубого приближения, у которых индекс λ2 второго датчика отличается от индекса λ1 первого датчика, и индекс s2 второй выборки не превышает индекса s1 первой выборки. Стрелки между точками грубого приближения указывают упорядоченность точек грубого приближения в представлении грубого приближения. Некоторые из вторых точек грубого приближения заполнены (серые кружки), а другие не заполнены (белые кружки). Все участки с серым фоном образуют причинно обусловленную окрестность, окружающую первые заполненные точки грубого приближения, то есть заполненные вторые точки грубого приближения, которые принадлежат к этой причинно обусловленной окрестности, могут быть получены и/или декодированы с помощью способа кодирования и/или декодирования перед обработкой первой заполненной точки P1 грубого приближения. Обратите внимание, что точки грубого приближения, у которых индекс датчика равен индексу λ1 первого датчика, не являются вторыми точками грубого приближения и не принадлежат к участку с серым фоном.
На стадии 120 данные Ipred кодируются в битовый поток В. Данные Ipred представляют выбранный предсказываемый радиус rpred.
На стадии 130 получается невязка rres радиуса с помощью вычисления разности между первым радиусом r1 и выбранным предсказываемым радиусом rpred:
Невязка rres радиуса кодируется в битовый поток В.
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 110, когда выбранный предсказываемый радиус rpred выбран среди радиусов r2, ассоциированных с множеством вторых заполненных Р2 точек грубого приближения, выбранный предсказываемый радиус rpred соответствует радиусу, который минимизирует стоимостную функцию, описывающую пропускную способность (для кодирования невязки rres радиуса) или компромисс между целевой пропускной способностью и уровнем искажений.
Согласно одному варианту осуществления стадии 130 невязка rres радиуса может быть закодирована двоичными данными, которые сигнализируют, равна ли нулю невязка rres радиуса, затем двоичные данные сигнализируют знак невязки rres, радиуса, а разность |rres|-1 может быть закодирована с помощью кодера expGolomb.
Согласно одному варианту разность |Q(rres)|-1 может быть закодирована с помощью кодера expGolomb, где Q(rres) является квантованной невязкой радиуса.
Может быть использовано любое другое кодирование невязки rres радиуса без какого-либо ограничения объема настоящего изобретения.
На фиг. 18 схематически показана блок-схема стадий способа 200 декодирования геометрических данных облака точек из битового потока закодированных данных облака точек согласно, по меньшей мере, одному пояснительному (иллюстративному) варианту осуществления.
Показанный на фиг. 18 способ 200 декодирования соответствует показанному на фиг. 17 способу 100 кодирования.
Рассматривается первая заполненная точка P1 грубого приближения, находящаяся в двумерном координатном (s, λ) пространстве. Первая заполненная точка P1 грубого приближения имеет индекс s1 первой выборки и индекс λ1 первого датчика в двумерном координатном (s, λ) пространстве.
На стадии 210 данные Ipred декодируются из битового потока В. Данные Ipred представляют выбранный предсказываемый радиус rpred, выбранный из, по меньшей мере, одного второго радиуса r2, ассоциированного с, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, у которой индекс λ2 второго датчика отличается от индекса λ1 первого датчика, и индекс s2 второй выборки меньше индекса s1 первой выборки.
На стадии 220 невязка rres радиуса декодируется из битового потока В.
На стадии 230 (декодированный) радиус r1, ассоциированный с точкой облака точек, представленной первой точкой P1 грубого приближения, получается на основании невязки rres радиуса и выбранного предсказываемого радиуса rpred, полученного из данных Ipred:
Согласно одному варианту осуществления стадии 230, невязка rres радиуса может быть декодирована с помощью декодирования двоичных данных, которые сигнализируют, равна ли нулю невязка rres радиуса, и затем, возможно, с помощью декодирования двоичных данных, которые сигнализируют знак невязки rres радиуса, и, возможно, с помощью декодирования разности |rres|-1 с помощью декодера expGolomb.
Согласно одному варианту разность |Q(rres)|-1 может быть декодирована с помощью декодера expGolomb, а невязка rres радиуса получается по формуле:

где IQ(Q(rres)) обозначает деквантованную невязку радиуса.
Может быть использовано любое другое декодирование невязки rres радиуса без какого-либо ограничения объема настоящего изобретения.
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, показанному на фиг. 20, выбранный предсказываемый радиус rpred может быть равен второму радиусу r2, ассоциированному со второй заполненной точкой Р2 грубого приближения, так что первое расстояние D1 между индексом λ2 второго датчика вышеупомянутой второй заполненной точки Р2 грубого приближения и индексом λ1 первого датчика заключено между двумя предельными значениями λ2;ниже и λ2;выше. Предельное значение λ2;ниже равно 2, а предельное значение λ2;выше равно 1 на пояснительном примере, показанном на фиг. 20.
Ограничение первого расстояния D1 ограничивает причинно обусловленную окрестность первой заполненной точки P1 грубого приближения, и поэтому ограничивает вычислительные ресурсы, необходимые для выбора предсказываемого радиуса. Это также обеспечивает некоторую корреляцию между радиусами r1 и r2, поскольку эта корреляция имеет тенденцию исчезать, когда разность |λ2 - λ1| индексов датчика большая.
Согласно этому пояснительному (иллюстративному) варианту осуществления способов 100 и 200 вторая заполненная точка Р2 грубого приближения может быть заполненной точкой грубого приближения, у которой имеются индекс λ2 второго датчика, отличный от индекса λ1 первого датчика, и индекс s2 второй выборки, который не превышает индекса s1 первой выборки. Вышеупомянутая вторая заполненная точка Р2 грубого приближения также удовлетворяет условию, что первое расстояние между индексом λ2 второго датчика вышеупомянутой второй заполненной точки Р2 грубого приближения и индексом λ1 первого датчика находится в диапазоне, заданном двумя предельными значениями λ2;ниже и λ2;выше. Такие вторые заполненные точки грубого приближения принадлежат к участкам с серым фоном, показанным на фиг. 20.
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, показанному на фиг. 21, выбранный предсказываемый радиус rpred может быть равен второму радиусу r2, ассоциированному со второй заполненной точкой Р2 грубого приближения, так что второе расстояние D2 между индексом s2 второй выборки вышеупомянутой второй заполненной точки Р2 грубого приближения и индексом s1 первой выборки ограничено предельным значением W. Как показано на фиг. 21, такие вторые заполненные точки Р2 грубого приближения принадлежат к участкам с серым фоном, а предельное значение W равно 4.
Установление предела для второго расстояния D2 ограничивает причинно обусловленную окрестность первый точки P1 грубого приближения и, следовательно, ограничивает вычислительные ресурсы для выбора предсказываемого радиуса. Это также обеспечивает некоторую корреляцию между радиусами r1 и r2, поскольку эта корреляция имеет тенденцию исчезать, когда разность индексов s1 - s2 датчика большая, так как точки P1 и Р2 имеют тенденцию принадлежать разным объектам или разным частям одного и того же объекта.
Согласно этому пояснительному (иллюстративному) варианту осуществления способов 100 и 200 вторая заполненная точка Р2 грубого приближения может быть заполненной точкой грубого приближения, у которой имеются индекс λ2 второго датчика, отличный от индекса λ1 первого датчика, и индекс s2 второй выборки, который не превышает индекса s1 первой выборки. Вышеупомянутая вторая заполненная точка Р2 грубого приближения также удовлетворяет условию, что второе расстояние D2 между индексом s2 второй выборки вышеупомянутой второй заполненной точки Р2 грубого приближения и индексом s1 первой выборки ограничено предельным значением W.
Согласно одному варианту, показанному на фиг. 22, выбранный предсказываемый радиус rpred может быть равен второму радиусу r2, ассоциированному со второй заполненной точкой Р2 грубого приближения, так что второе расстояние D1 имеет минимальное значение.
Этот вариант максимизирует вероятность получения хорошего предсказываемого радиуса, поскольку вторые заполненные точки Р2 грубого приближения, рассматриваемые для выбора предсказываемого радиуса, являются ближайшими заполненными точками грубого приближения к первой точке P1 грубого прогнозирования. Таким образом, первая заполненная точка P1 грубого приближения и вышеупомянутые вторые заполненные точки Р2 грубого приближения могут с очень большой вероятностью быть ассоциированы с точками того же самого обнаруженного объекта.
Согласно этому варианту вторая заполненная точка Р2 грубого приближения представляет собой заполненную точку грубого приближения, у которой имеются индекс λ2 второго датчика, отличный от индекса λ1 первого датчика, и индекс s2 второй выборки, который не превышает индекса s1 первой выборки. Вышеупомянутая вторая заполненная точка Р2 грубого приближения также удовлетворяет условию, что второе расстояние D2 имеет минимальное значение. Как показано на фиг. 22, такие вторые заполненные точки грубого приближения принадлежат к участкам с серым фоном, а две заполненные вторые точки Р2 грубого приближения рассматриваются для выбора предсказываемого радиуса rpred.
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, показанному на фиг. 23, выбранный предсказываемый радиус rpred может быть выбран на основании, по меньшей мере, двух вторых радиусов r2,i, ассоциированных, по меньшей мере, с двумя вторыми заполненными точками Р2,i грубого приближения, у которых одинаковое второе расстояние D2 между их индексом s2 второй выборки и индексом s1 первой выборки. Выбранный предсказываемый радиус rpred равен второму радиусу r2,i, ассоциированному со второй заполненной точкой Р2,i грубого приближения, либо имеющей ближайший индекс λ2,i датчика к индексу λ1 первого датчика (точка Р2,i на фиг. 23), либо, согласно одному варианту, имеющей ближайший индекс датчика ниже, чем (меньше, чем) индекс λ1 первого датчика (точка Р2,i-1 на фиг. 23).
Согласно этому пояснительному (иллюстративному) варианту осуществления способов 100 и 200 вторая заполненная точка Р2 грубого приближения может быть заполненной точкой грубого приближения, у которой имеются индекс λ2 второго датчика, отличный от индекса λ1 первого датчика, и индекс s2 второй выборки, который не превышает индекса s1 первой выборки. Вышеупомянутая вторая заполненная точка Р2 грубого приближения имеет ближайший индекс λ2,i датчика к индексу λ1 первого датчика, либо, согласно одному варианту, имеет ближайший индекс датчика ниже, чем (меньше, чем) индекс λ1 первого датчика.
Этот пояснительный (иллюстративный) вариант осуществления и его вариант максимизируют вероятность получения хорошего предсказываемого радиуса, поскольку вторые заполненные точки Р2 грубого приближения, рассматриваемые для выбора предсказываемого радиуса, являются ближайшими заполненными точками грубого прогнозирования к первой точке P1 грубого прогнозирования в двумерном координатном (s, λ) пространстве. Таким образом, первая заполненная точка P1 грубого приближения и вышеупомянутые вторые заполненные точки Р2 грубого приближения могут с очень большой вероятностью быть ассоциированы с точками того же самого обнаруженного объекта.
Согласно одному варианту выбранный предсказываемый радиус rpred может быть равен среднему значению вышеупомянутых, по меньшей мере, двух вторых радиусов r2,i.
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, показанному на фиг. 24, выбранный предсказываемый радиус rpred, может быть выбран из, по меньшей мере, одного второго радиуса r2, ассоциированного с, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, и из, по меньшей мере, одного третьего радиуса r3, ассоциированного с, по меньшей мере, одной третьей заполненной точкой Р3 грубого приближения, у которой индекс λ3 датчика равен индексу λ1 первого датчика, и индекс s3 выборки меньше индекса s1 первой выборки.
Этот пояснительный (иллюстративный) вариант осуществления является предпочтительным, поскольку он обеспечивает хорошие предсказываемые радиусы в обоих случаях, когда новые обнаруженные точки принадлежат новому объекту или когда новые обнаруженные точки принадлежат ранее обнаруженному объекту.
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, способ может дополнительно предусматривать стадию корректировки выбранного предсказываемого радиуса rpred, полученного из, по меньшей мере, одного второго радиуса r2 (или r2,.i), ассоциированного с, по меньшей мере, одной второй заполненной точкой Р2 (или Р2,i) грубого приближения, у которой есть, по меньшей мере, один индекс s2 (или s2,i) второй выборки, такая корректировка выполняется с помощью первого корректировочного значения С1 на основании вышеупомянутого, по меньшей мере, одного индекса s2 (или s2,i) второй выборки и индекса s1 первой выборки.
Этот пояснительный (иллюстративный) вариант осуществления является предпочтительным, поскольку он исправляет несоответствие в индексах выборки, которое может возникнуть, когда индекс второй выборки второй заполненной точки грубого приближения строго меньше, чем индекс первой выборки:
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, корректировочное значение С1 может зависеть от величины производной, оцененной на основе двух заполненных точек PO1 и РО2 грубого приближения, которые имеют разные индексы выборки, соответственно sO1 и sO2, одинаковый индекс датчика (который может быть или не быть равен индексу λ1 первого датчика) и ассоциированные радиусы rO1 и rO2, согласно формуле:
где
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200 производная может быть оценена по набору заполненных точек РО,i грубого приближения, имеющих индексы sO,i выборки, радиусы rO,i и одинаковый индекс датчика. Регрессионная прямая уравнения r=a*s+b получается из этих заполненных точек РО,i грубого приближения, например, по методу наименьших квадратов. Производная затем вычисляется как dr/ds ≈ а.
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, способ может дополнительно предусматривать стадию корректировки выбранного предсказываемого радиуса rpred, полученного из, по меньшей мере, одного второго радиуса r2 (или r2,i), ассоциированного с, по меньшей мере, одной второй заполненной точкой Р2 (или Р2,i) грубого приближения, у которой есть, по меньшей мере, один индекс λ2 (или λ2,i) второго датчика, такая корректировка выполняется с помощью второго корректировочного значения С2 на основании вышеупомянутого, по меньшей мере, одного индекса λ2 (или λ2,i) датчика и индекса λ1 первого датчика.
Этот пояснительный (иллюстративный) вариант осуществления является предпочтительным, поскольку он исправляет несоответствие в индексах выборки, которое может возникнуть, когда индекс второго датчика второй заполненной точки грубого приближения отличается от индекса первого датчика:
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, корректировочное значение С2 может зависеть от величины производной, оцененной на основе двух заполненных точек PO1 и РО2 грубого приближения, которые имеют разные индексы датчика, соответственно λO1 и λO2, одинаковый индекс выборки (который может быть или не быть равен индексу s1 первой выборки) и ассоциированные радиусы rO1 и rO2 согласно формуле:
где
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200 производная может быть оценена по набору заполненных точек PO,i грубого приближения, имеющих индексы λO,i датчиков, радиусы rO,i и одинаковый индекс выборки. Регрессионная прямая уравнения r=с* λ+d получается из этих заполненных точек PO,i грубого приближения, например, с помощью метода наименьших квадратов. Производная затем вычисляется как dr/ds ≈ а.
Согласно одному пояснительному (иллюстративному) варианту осуществления способов 100 и 200, выбранный предсказываемый радиус rpred может быть получен как результат радиальной функции после подстановки в нее индекса s1 первой выборки и индекса λ1 первого датчика, причем вышеупомянутая радиальная функция получается методом линейной регрессии вторых радиусов r2,i, ассоциированных, по меньшей мере, с двумя заполненными точками (Р2,i) грубого приближения, на основании индексов s2,i второй выборки и индексов λ2,i второго датчика для двух вышеупомянутых вторых заполненных точек Р2,i грубого приближения.
Например линейная функция уравнения r=e*λ+f*s+g получается из вышеупомянутых вторых заполненных точек Р2,i грубого приближения, например, с помощью метода наименьших квадратов. Предсказываемый радиус rpred затем получается по формуле:

На фиг. 25 схематически показана блок-схема стадий варианта способа 100, показанного на фиг. 17.
На стадии 105 для первой заполненной точки P1 грубого приближения получается список возможных радиусов  Список возможных радиусов L содержит, по меньшей мере, один второй радиус r2, ассоциированный с, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, у которой индекс λ2 второго датчика отличается от индекса λ1 первого датчика, и у которой индекс s2 второй выборки не превышает индекса s1 первой выборки.
Список возможных радиусов L содержит, по меньшей мере, один второй радиус r2, ассоциированный с, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, у которой индекс λ2 второго датчика отличается от индекса λ1 первого датчика, и у которой индекс s2 второй выборки не превышает индекса s1 первой выборки.
Вышеупомянутая, по меньшей мере, одна вторая заполненная точка грубого приближения может также быть получена согласно любому варианту осуществления или его варианту, обсуждавшемуся со ссылкой на фиг. 17, или из любой их комбинации.
Согласно фиг. 25 вышеупомянутая, по меньшей мере, одна вторая заполненная точка Р2 грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с вышеупомянутой, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, вероятно, снижает динамический диапазон невязки rres радиуса.
Согласно одному варианту осуществления некоторого варианта способа 100 радиус, ассоциированный с заполненной точкой грубого приближения, которая выбрана согласно, по меньшей мере, одному варианту осуществления или его варианту, обсуждавшемуся со ссылкой на фиг. 17, или любой их комбинации, не участвует в выборе предсказываемого радиуса rpred, если вышеупомянутая, по меньшей мере, одной заполненная точка грубого приближения не удовлетворяет вышеупомянутому, по меньшей мере, одному условию приемлемости. Условие приемлемости выполняет отсеивание заполненных точек грубого приближения, которые могут быть выбраны согласно, по меньшей мере, одному варианту осуществления или его варианту, обсуждавшемуся со ссылкой на фиг. 17, или любой их комбинации.
На стадии 110 для первой заполненной точки P1 грубого приближения из списка возможных радиусов L определяется выбранный предсказываемый радиус rpred.
На стадии 120 данные Ipred кодируются в битовый поток В. Данные Ipred представляют выбранный предсказываемый радиус rpred в списке возможных радиусов L.
На стадии 120 определяется невязка rres радиуса и она кодируется в битовый поток В.
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 110, когда выбранный предсказываемый радиус rpred выбран из множества радиусов, ассоциированных с множеством вторых и/или множеством третьих заполненных точек грубого приближения, выбранный предсказываемый радиус rpred соответствует радиусу, который минимизирует стоимостную функцию, описывающую пропускную способность (для кодирования невязки rres радиуса) или компромисс между целевой пропускной способностью и уровнем искажений.
На фиг. 26 схематически показана блок-схема стадий одного варианта способа 200 показанного на фиг. 18.
Рассматривается первая заполненная точка P1 грубого приближения, находящаяся в двумерном координатном (s, λ) пространстве. Первая заполненная точка P1 грубого приближения имеет индекс s1 первой выборки и индекс λ1 первого датчика в двумерном координатном (s, λ) пространстве.
На стадии 105 для первой заполненной точки P1 грубого приближения получается список возможных радиусов  Список возможных радиусов L содержит, по меньшей мере, один второй радиус r2, ассоциированный с, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, у которой индекс λ2 второго датчика отличается от индекса λ1 первого датчика, и индекс s2 второй выборки не превышает индекса s1 первой выборки.
Список возможных радиусов L содержит, по меньшей мере, один второй радиус r2, ассоциированный с, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, у которой индекс λ2 второго датчика отличается от индекса λ1 первого датчика, и индекс s2 второй выборки не превышает индекса s1 первой выборки.
Вышеупомянутая, по меньшей мере, одна вторая заполненная точка грубого приближения может также быть получена согласно любому варианту осуществления или его варианту, обсуждавшемуся со ссылкой на фиг. 18, или из любой их комбинации.
Согласно фиг. 26 вышеупомянутая, по меньшей мере, одна вторая заполненная точка Р2 грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с вышеупомянутой, по меньшей мере, одной второй заполненной точкой Р2 грубого приближения, вероятно, снижает динамический диапазон невязки rres радиуса.
Согласно одному варианту осуществления некоторого варианта способа 200 радиус, ассоциированный с заполненной точкой грубого приближения, которая выбрана согласно, по меньшей мере, одному варианту осуществления или его варианту, обсуждавшемуся со ссылкой на фиг. 18, или любой их комбинации, не участвует в выборе предсказываемого радиуса rpred, если вышеупомянутая, по меньшей мере, одна заполненная точка грубого приближения не удовлетворяет вышеупомянутому, по меньшей мере, одному условию приемлемости. Условия приемлемости выполняют отсеивание заполненных точек грубого приближения, которые могут быть выбраны согласно, по меньшей мере, одному варианту осуществления или его варианту, обсуждавшемуся со ссылкой на фиг. 18, или любой их комбинации.
На стадии 210 данные Ipred декодируются из битового потока В. Данные Ipred представляют выбранный предсказываемый радиус (rpred) в списке возможных радиусов L.
На стадии 220 невязка rres радиуса декодируется из битового потока В.
На стадии 230 (декодированный) радиус  , ассоциированный с точкой облака точек, представленной первой точкой (P1) грубого приближения, получается на основании невязки rres радиуса и выбранного предсказываемого радиуса rpred, полученного из данных Ipred и списка возможных радиусов
, ассоциированный с точкой облака точек, представленной первой точкой (P1) грубого приближения, получается на основании невязки rres радиуса и выбранного предсказываемого радиуса rpred, полученного из данных Ipred и списка возможных радиусов 
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 105, показанному на фиг. 24, список возможных радиусов  может дополнительно содержать, по меньшей мере, один третий радиус r3, ассоциированный с, по меньшей мере, одной третьей заполненной точкой Р3 грубого приближения, у которой индекс λ3 третьего датчика равен индексу λ1 первого датчика, и индекс s3 третьей выборки не больше индекса s1 первой выборки.
может дополнительно содержать, по меньшей мере, один третий радиус r3, ассоциированный с, по меньшей мере, одной третьей заполненной точкой Р3 грубого приближения, у которой индекс λ3 третьего датчика равен индексу λ1 первого датчика, и индекс s3 третьей выборки не больше индекса s1 первой выборки.
Этот пояснительный (иллюстративный) вариант осуществления является предпочтительным, поскольку он обеспечивает хорошие предсказываемые радиусы, когда новые обнаруженные точки принадлежат новому объекту, и хорошие предсказываемые радиусы, когда новые обнаруженные точки принадлежат ранее обнаруженному объекту.
Согласно одному пояснительному (иллюстративному) варианту осуществления одного варианта способов 100 и 200, показанному на фиг. 27, условие приемлемости может быть основано на сравнении между индексом s2 второй выборки второй заполненной точки Р2 грубого приближения и индексом s3 третьей выборки третьей заполненной точки Р3 грубого приближения.
Из простой геометрии понятно, что в случае обнаруженной вертикальной плоскости динамический диапазон невязки rres радиуса относительно предсказываемого радиуса rpred является, в первом приближении, пропорциональным расстоянию |spred-s1|, где spred является индексом выборки заполненной второй (или третьей) точки грубого приближения, ассоциированной с предсказываемый радиусом rpred.
Согласно одному варианту, показанному на фиг. 27, условие приемлемости может быть удовлетворено второй заполненной точкой Р2 грубого приближения, когда индекс s2 второй выборки больше, чем индекс s3 третьей выборки.
Этот пояснительный (иллюстративный) вариант осуществления позволяет выполнить выбор второй заполненной точки грубого приближения вместо третьей заполненный точки грубого приближения, только если вышеупомянутая вторая заполненная точка грубого приближения удовлетворяет вышеупомянутому условию приемлемости. В этом случае радиус вышеупомянутой заполненной второй точки грубого приближения является лучшим предсказываемый радиусом, чем радиус, ассоциированный с третьей заполненной точкой грубого приближения, поскольку заполненная вторая точка грубого приближения была обнаружена позже, чем заполненная третья точка грубого приближения.
Согласно одному пояснительному (иллюстративному) варианту осуществления одного варианта способов 100 и 200 условие приемлемости может быть основано на сравнении азимутальных углов, ассоциированных с датчиками, используемыми для обнаружения точек облака точек, ассоциированных с заполненными первой, второй и третьей точками грубого приближения.
В этом пояснительном (иллюстративном) варианте осуществления используется сравнение азимутальных углов, ассоциированных с заполненными точками грубого приближения, для определения, нужно ли выбирать вторую или третью точку грубого приближения для предсказания первого радиуса r1. Этот пояснительный (иллюстративный) вариант осуществления является предпочтительным, поскольку сравнение азимутальных углов обеспечивает более высокую точность, чем сравнение индексов выборки.
Согласно одному пояснительному (иллюстративному) варианту осуществления одного варианта способов 100 и 200 условие приемлемости может быть удовлетворено второй заполненной точкой Р2 грубого приближения, когда первая разность A1 азимутальных углов меньше, чем вторая разность A2 азимутальных углов. Первая разность A1 азимутальных углов является разностью между первым азимутальным углом φ1 ассоциированным с первой заполненной точкой P1 грубого приближения, и вторым азимутальным углом φ2, ассоциированным со второй заполненной точкой Р2 грубого приближения:
Вторая разность A2 азимутальных углов является разностью между первым азимутальным углом ф1 и третьим азимутальным углом φ3, ассоциированным с третьей заполненной точкой Р3 грубого приближения:
Например, если A1>A2, то, вероятно, лучшим предсказанием будет радиус, ассоциированный с заполненной третьей точкой грубого приближения, поэтому заполненная вторая точка грубого приближения не является приемлемой. В обратном случае A1<A2) заполненная вторая точка грубого приближения является приемлемой.
Согласно одному пояснительному (иллюстративному) варианту осуществления одного варианта способов 100 и 200 условие приемлемости может быть удовлетворено второй заполненной точкой Р2 грубого приближения, когда расстояние D3 превышает пороговое значение th1:
Этот пояснительный (иллюстративный) вариант осуществления является предпочтительным, поскольку в нем радиус, ассоциированный с заполненной второй точкой Р2 грубого приближения, выбирается только в том случае, если выигрыш, ожидаемый от выбранного предсказуемого радиуса, равного вышеуказанному радиусу r2, вряд ли компенсирует затраты на дополнительный синтаксис, сигнализирующий об использовании вышеупомянутого радиуса r2.
Может быть вычислено расстояние D3 между вторым радиусом r2, ассоциированным со второй заполненной точкой Р2 грубого приближения, и третьим радиусом r3, ассоциированным с третьей заполненной точкой Р3 грубого приближения:
Согласно одному варианту заполненная третья точка Р3 грубого приближения при вычислении расстояния D3 может быть ближайшей заполненной точкой грубого приближения, то есть заполненной третьей точкой грубого приближения, которая минимизирует расстояние между индексом s3 третьей выборки вышеупомянутой третьей точки Р3 грубого приближения и индексом s1 первый выборки.
Согласно одному пояснительному (иллюстративному) варианту осуществления одного варианта способов 100 и 200 пороговое значение th1 может быть фиксированным.
Согласно одному варианту пороговое значение th1 может быть основано на предыдущей закодированной или декодированной невязке rres радиуса, ассоциированной с заполненными точками грубого приближения, у которых индекс датчика равен индексу λ1 первого датчика.
Например, пороговое значение th1 может быть получено из среднего значения амплитуд |rres| ряда предыдущих закодированных или декодированных невязок rres радиуса для того же самого индекса датчика.
Этот вариант является предпочтительным, поскольку он адаптирует пороговое значение th1 к среднему качеству предсказания радиусов.
Согласно одному пояснительному (иллюстративному) варианту осуществления одного варианта способов 100 и 200 условие приемлемости может быть удовлетворено второй заполненной точкой Р2 грубого приближения, когда отношение градиента радиуса к градиенту индексов выборки, оцененное из, по меньшей мере, двух предыдущих закодированных/декодированных вторых заполненных точек РО,1 и РО,2 грубого приближения, больше, чем пороговое значение:
Согласно одному варианту для того, чтобы снизить чувствительность к шуму, при оценке градиентов радиуса и индексов выборки можно использовать более двух предыдущих закодированных/декодированных вторых заполненных точек грубого приближения.
Этот пояснительный (иллюстративный) вариант осуществления является предпочтительным, поскольку в нем выбирается радиус, ассоциированный со второй заполненной точкой Р2 грубого приближения, только в том случае, если обнаруженная точка, ассоциированная с вышеупомянутой второй заполненной точкой Р2 грубого приближения, не принадлежит плоскости, которая практически перпендикулярна к направлению обнаружения, то есть когда величина градиента dr/ds является малой. Тогда, в случае, если вышеупомянутая точка принадлежит плоскости, которая практически перпендикулярна к направлению обнаружения, не будет (в первом приближении) изменения радиуса, ассоциированного с последовательными обнаруженными точками, при изменении азимутального угла ф, и, следовательно, будет небольшое изменение при изменении индекса s выборки. В этом случае предсказываемый радиус, который равен радиусу, ассоциированному с третьей заполненной точкой Р3 грубого приближения, вероятно, обеспечит лучшую эффективность кодирования, чем предсказываемый радиус, который равен радиусу, ассоциированному со второй заполненной точкой Р2 грубого приближения.
Согласно одному пояснительному (иллюстративному) варианту осуществления одного варианта способов 100 и 200 пороговое значение th2 может соответствовать минимальному углу αmin между направлением обнаружения и направлением, перпендикулярным к обнаруженной плоскости.
Например, можно выбрать такое значение, как αmin =20°.
Как только, по меньшей мере, один второй радиус r2 был получен и подтвержден как приемлемый, кодер выбирает лучший предиктор среди третьих радиусов r3 и вышеупомянутого, по меньшей мере, одного приемлемого второго радиуса r2. Данные I(pred) необходимо отправить на декодер, чтобы декодер знал, какой предиктор был использован.
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 120 или 210 данные Ipred указывают, является ли выбранный предсказываемый радиус rpred равным либо второму радиусу r2, либо третьему радиусу r3.
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 120 или 210 данные Ipred могут содержать двоичные данные b, которые указывают, является ли выбранный предсказываемый радиус rpred либо вторым радиусом r2, либо третьим радиусом r3.
Например, двоичные данные b равны 0 для указания, что выбранный предсказываемый радиус rpred является вторым радиусом r2, или равны 1 для указания, что выбранный предсказываемый радиус rpred является третьим радиусом r3.
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 120 или 210 вышеупомянутый, по меньшей мере, один второй радиус r2 может образовать первый список радиусов  а вышеупомянутый, по меньшей мере, один третий радиус r3 может образовать второй список радиусов
а вышеупомянутый, по меньшей мере, один третий радиус r3 может образовать второй список радиусов  Затем двоичные данные b могут указывать, принадлежит ли выбранный предсказываемый радиус rpred либо первому, либо второму списку радиусов.
Затем двоичные данные b могут указывать, принадлежит ли выбранный предсказываемый радиус rpred либо первому, либо второму списку радиусов.
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 120 или 210 данные Ipred могут дополнительно содержат индекс Idx предиктора, который указывает, какому радиусу из первого или второго списка радиусов равен выбранный предсказываемый радиус rpred.
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 120 или 210, показанному на фиг. 28, выбранный предсказываемый радиус rpred может быть выбран среди единственного второго радиуса r2 и списка  из Np третьих радиусов r3,i (Np≥1). Данные (Ipred) содержат индекс Idx предиктора, так что, если индекс Idx предиктора не равен заранее определенному значению IdxV индекса, то индекс Idx предиктора указывает, какому радиусу r3 из списка равен выбранный предсказываемый радиус rpred; в противном случае данные Ipred дополнительно содержат двоичные данные fHV, которые указывают, равен ли выбранный предсказываемый радиус rpred либо второму радиусу r2, либо третьему радиусу r3, указанному заранее определенным значением IdxV индекса в списке радиусов.
из Np третьих радиусов r3,i (Np≥1). Данные (Ipred) содержат индекс Idx предиктора, так что, если индекс Idx предиктора не равен заранее определенному значению IdxV индекса, то индекс Idx предиктора указывает, какому радиусу r3 из списка равен выбранный предсказываемый радиус rpred; в противном случае данные Ipred дополнительно содержат двоичные данные fHV, которые указывают, равен ли выбранный предсказываемый радиус rpred либо второму радиусу r2, либо третьему радиусу r3, указанному заранее определенным значением IdxV индекса в списке радиусов.
Согласно этому пояснительному (иллюстративному) варианту осуществления индекс Idx предиктора кодируется первым, за ним, при необходимости, следуют двоичные данные fHV в случае, когда индекс Idx предиктора равен заранее определенному значению IdxV индекса.
Индекс Idx может быть унарно закодирован с помощью последовательности двоичных данных fi.
Например, индекс Idx предиктора содержит двоичные данные f1 (фиг. 28). Если двоичные данные f1 равны 1 (истина), то индекс Idx предиктора равен 1 и индекс Idx предиктора указывает радиус r3,1 в списке радиусов. Если f1=0 и f2=1, то индекс Idx предиктора равен 2 и Idx равняется заранее определенному значению индекса IdxV (=2), и в этом случае данные Ipred также содержат двоичные данные fHV, которые указывают радиус r3,2 в списке радиусов, если fHV=0, и единственный второй радиус r2 в противном случае. Если f1=0, f2=0 и f3=1, то тогда индекс Idx предиктора равен 3 и он указывает радиус r3,3 в списке радиусов и т.д.
В этом случае приоритет отдается радиусу r3,i, имеющему значение индекса меньше, чем заранее определенное значение IdxV индекса. Это является преимуществом, поскольку было замечено, что третий радиус, ассоциированный с ближайшей третьей заполненной точкой грубого приближения, с большей вероятностью станет лучшим предиктором, чем второй радиус, ассоциированный со второй заполненной точкой грубого приближения.
В показанном на фиг. 28 примере заранее определенное значение IdxV индекса равно 2, так что имеет приоритет только третий радиус r3,1, ассоциированный с ближайшими третьими заполненными точками грубого приближения.
В случае, если список предикторов имеет индексы в диапазоне 0…Np-1, заранее определенное значение индекса IdxV равно 1 (вместо 2).
Согласно одному пояснительному (иллюстративному) варианту осуществления стадии 120 или 210 вышеупомянутые, по меньшей мере, один второй радиус r2 и, по меньшей мере, один третий радиус r3 могут образовать единственный список  радиусов, а данные Ipred содержат индекс предиктора, который указывает, какому радиусу из списка радиусов равен выбранный предсказываемый радиус rpred.
радиусов, а данные Ipred содержат индекс предиктора, который указывает, какому радиусу из списка радиусов равен выбранный предсказываемый радиус rpred.
Этот единственный список радиусов может быть построен с помощью «конкуренции» между предсказываемыми радиусами. На практике локальная статистика, зависящая, например, от положения заполненной точки грубого приближения относительно первой заполненной точки P1 грубого приближения, может быть получена с помощью выбора всех предсказываемых радиусов из ранее кодированных/декодированных точек.
Согласно одному варианту радиусы единственного списка радиусов упорядочены в порядке от статистически наиболее часто выбираемого к наименее часто выбираемому.
Радиусы списка L радиусов затем упорядочиваются в порядке от статистически наиболее часто выбираемого к наименее часто выбираемому. Этот вариант позволяет использовать несколько радиусов, ассоциированных с заполненными вторыми точками грубого приближения, и локально адаптируется к структуре облака точек.
На фиг. 29 в виде блок-схемы схематически показан пример системы, в которой реализованы различные аспекты и пояснительные (иллюстративные) варианты осуществления.
Система 300 может быть встроена в одно или несколько устройств, включая описанные ниже различные компоненты. Согласно различным вариантам осуществления система 300 может быть выполнена с возможностью осуществлять один или несколько аспектов, описанных в настоящем документе.
Примеры оборудования, которые могут образовать всю систему 300 или ее часть, включают в себя персональные компьютеры, ноутбуки, смартфоны, планшетные компьютеры, цифровые мультимедийные приставки к телевизорам, цифровые телевизионные приемники, персональные системы видеозаписи, бытовые приборы с выходом в интернет, транспортные средства с выходом в интернет и их соответствующие вычислительные системы, нашлемные дисплеи (HMD, очки виртуальной реальности), проекторы (мультимедийные проекторы), «пещеры» (системы с многочисленными дисплеями), серверы, видеокодеры, видеодекодеры, постпроцессоры, обрабатывающие сигнал с видеодекодера, препроцессоры, подающие сигнал на видеокодер, веб-серверы, приставки к телевизорам и любые другие устройства для обработки облака точек, видео или изображения или другие устройства передачи данных. Элементы системы 300, по отдельности или в комбинации, могут быть реализованы в виде единственной интегральной схемы (ИС), нескольких ИС и/или дискретных компонентов. Например, по меньшей мере, согласно одному варианту осуществления, элементы обработки и кодера/декодера системы 300 распределены по многочисленным ИС и/или дискретным компонентам. Согласно различным вариантам осуществления система 300 может быть связана каналами передачи данных с другими подобными системами или другими электронными устройствами, с помощью, например, шины передачи данных или через специальные порты ввода и/или вывода.
Система 300 может содержать в себе, по меньшей мере, один процессор 310, выполненный с возможностью выполнять команды, загруженные в него для реализации, например, различных аспектов, описанных в настоящем документе. Процессор 310 может содержать в себе встроенную память, интерфейс ввода-вывода и различные другие схемы, известные в этой области техники. Система 300 может содержать в себе, по меньшей мере, одну память 320 (к примеру, устройство энергозависимой памяти и/или устройство энергонезависимой памяти). Система 300 может содержать в себе запоминающее устройство 340, которое может включать в себя энергозависимую память и/или энергонезависимую память, включая, помимо прочего, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), оперативное запоминающее устройство (ОЗУ), динамическое оперативное запоминающее устройство (ДОЗУ), статическое оперативное запоминающее устройство (СОЗУ), флеш-память, накопитель на магнитном диске и/или накопитель на оптическом диске. Запоминающее устройство 340 может включать в себя внутреннее запоминающее устройство, подключенное запоминающее устройство и/или доступное по сети запоминающее устройство, в качестве не имеющих ограничительного характера примеров.
Система 300 может содержать в себе модуль 330 кодера/декодера, выполненный с возможностью, например, обрабатывать данные для создания закодированных/декодированных геометрических данных облака точек, и модуль 330 кодера/декодера может содержать в себе свой собственный процессор и память. Модуль 330 кодера/декодера может являться примером модуля, который может быть включен в устройство для выполнения функций кодирования и/или декодирования. Как известно, устройство может включать в себя один или оба модуля кодирования и декодирования. Дополнительно, модуль 330 кодера/декодера может быть реализован как отдельный элемент системы 300 или может быть встроен в процессор 310 в качестве комбинации аппаратных и программных средств, как известно специалистам в этой области техники.
Код программы, которую нужно загрузить в процессор 310 или в кодер/декодер 330 для выполнения различных аспектов, описанных в настоящем документе, может храниться в запоминающем устройстве 340 и в дальнейшем загружаться в память 320 для выполнения процессором 310. Согласно различным вариантам осуществления один или несколько процессоров 310, память 320, запоминающее устройство 340 и модуль 330 кодера/декодера могут хранить один или несколько различных наборов данных во время выполнения процессов, описанных в настоящем документе. Такие хранящиеся наборы данных могут включать в себя, помимо прочего, каркас облака точек, закодированные/декодированные геометрические данные/атрибуты видео/изображений или частей закодированных/декодированных геометрических данных/атрибутов видео/изображений, битовый поток, матрицы, переменные и промежуточные или окончательные результаты обработки уравнений, формул, операций и рабочей логики.
Согласно некоторым вариантам осуществления, память внутри процессора 310 и/или модуля 330 кодера/декодера может использоваться для хранения команд и для предоставления рабочей памяти для обработки, которая может быть выполнена во время кодирования или декодирования.
Однако согласно другим вариантам осуществления, память, внешняя по отношению к устройству обработки (например, устройством обработки может быть либо процессор 310, либо модуль 330 кодера/декодера), может использоваться для одной или нескольких из этих функций. Внешняя память может быть памятью 320 и/или запоминающим устройством 340, например, динамической энергозависимой памятью и/или энергонезависимой флеш-памятью. Согласно некоторым вариантам осуществления, внешняя энергонезависимая флеш-память используется для хранения операционной системы для телевизора. Согласно, по меньшей мере, одному варианту осуществления, быстрая внешняя динамическая энергозависимая память, например, ОЗУ, используется в качестве рабочей памяти для операций кодирования и декодирования видео, в частности, для части 2 MPEG-2 (также известен как Рекомендации сектора электросвязи МСЭ (ITU-Т) Н.262 и ISO/IEC 13818-2, также известен как MPEG-2 Video), HEVC (высокоэффективное видеокодирование), VVC (универсальное кодирование видео), или части 5 или части 9 MPEG-I.
Ввод данных в элементы системы 300 может быть обеспечен с помощью различных входных устройств, которые указаны внутри блока 390. Такие входные устройства включают в себя, помимо прочего, (i) радиочастотный (РЧ) модуль, который может принимать РЧ сигнал, переданный, например, в эфир радиовещательной компанией, (ii) компонентный входной терминал, (iii) входной терминал USB, и/или (iv) входной терминал мультимедийного интерфейса высокой четкости (HDMI).
Согласно различным вариантам осуществления, входные устройства блока 390 могут иметь ассоциированные соответствующие входные обрабатывающие элементы, как известно в этой области техники. Например, РЧ модуль может быть ассоциирован с элементами, необходимыми для (i) выбора нужной частоты (также называется выбор сигнала или ограничение диапазона сигнала до полосы частот), (ii) преобразования выбранного сигнала с понижением частоты, (iii) нового ограничения диапазона сигнала до более узкой полосы частот для выбора (к примеру) полосы частот сигнала, которую в некоторых вариантах осуществления можно называть каналом, (iv) демодулирования пониженного по частоте и ограниченного по полосе сигнала, (v) выполнения коррекции ошибок, и (vi) демультиплексирования для выбора нужного потока пакетов данных. РЧ модуль, согласно различным вариантам осуществления, может содержать один или несколько элементов для выполнения этих функций, например, селекторы частоты, селекторы сигнала, ограничители полосы, селекторы канала, фильтры, понижающие преобразователи частоты, демодуляторы, корректоры ошибок и демультиплексоры. РЧ модуль может содержать тюнер, который выполняет различные из этих функций, включая, например, преобразование принятого сигнала с понижением частоты до более низкой частоты (например, до промежуточный частоты или почти до базовых частот) или до базовых частот.
Согласно одному варианту осуществления с телевизионной приставкой, РЧ модуль и его ассоциированный входной обрабатывающий элемент могут принимать РЧ сигнал, передаваемый по проводной среде (например, по кабелю). Затем РЧ модуль может выполнить выбор частоты посредством фильтрации, преобразования с понижением частоты и новой фильтрации до желаемой полосы частот.
В различных вариантах осуществления изменен порядок описанных выше (и других) элементов, удалены некоторые из этих элементов, и/или добавлены другие элементы, выполняющий подобные или другие функции.
Добавление элементов может включать в себя вставление элементов между существующими элементами, например, вставление усилителей и аналого-цифрового преобразователя. Согласно различным вариантам осуществления РЧ модуль может содержать антенну.
Дополнительно, терминалы USB и/или HDMI могут включать в себя соответствующие процессоры интерфейса для подключения системы 300 к другим электронным устройствам по соединениям USB и/или HDMI. Следует понимать, что можно реализовать различные аспекты обработки входного сигнала, например, коррекцию ошибок по коду Рида-Соломона, например, внутри отдельной входной обрабатывающей ИС или внутри процессора 310 по мере необходимости. Аналогичным образом, аспекты обработки интерфейса USB или HDMI можно реализовать внутри отдельных интерфейсных ИС или внутри процессора 310 по мере необходимости. Поток демодулированных, прошедших коррекцию ошибок и демультиплексированных данных может подаваться на различные обрабатывающие элементы, включающие, например, процессор 310 и кодер/декодер 330, работающие совместно с памятью и элементами хранения данных для обработки потока данных, как необходимо для вывода на выходное устройство.
Различные элементы системы 300 могут быть размещены внутри общего корпуса. Внутри общего корпуса различные элементы могут быть соединены вместе и передавать данные между собой с помощью подходящей конфигурации 390 соединений, например, через внутреннюю шину, как известно в этой области техники, включая шину связи между ИС (I2C), электропроводку и печатные платы.
Система 300 может включать в себя интерфейс 350 передачи данных, который позволяет обмениваться данными с другими устройствами по каналу 700 передачи данных. Интерфейс 350 передачи данных может включать в себя, помимо прочего, приемопередатчик, выполненный с возможностью передавать и принимать данные по каналу 700 передачи данных. Интерфейс 350 передачи данных может включать в себя, помимо прочего, модем или сетевую карту, а канал 700 передачи данных может быть выполнен, например, на основе проводной и/или беспроводной среды.
Согласно различным вариантам осуществления, данные могут поступать в систему 300 в потоковом режиме с использованием сети Wi-Fi, например, согласно стандарту IEEE 802.11. Сигнал Wi-Fi в таких вариантах осуществления может приниматься по каналу 700 передачи данных и по интерфейсу 350 передачи данных, которые адаптированы для Wi-Fi связи. Канал 700 передачи данных в таких вариантах осуществления может быть типично подсоединен к точке доступа или к маршрутизатору, который предоставляет доступ к внешним сетям, включая Интернет, для разрешения работы потоковых приложений и других протоколов связи по технологии ОТТ.
Согласно другим вариантам осуществления, потоковые данные могут предоставляться системе 300 с помощью телевизионной приставки, которая доставляет данные по соединению HDMI входного блока 390.
Согласно иным другим вариантам осуществления, потоковые данные могут предоставляться системе 300 с помощью РЧ соединения входного блока 390.
Потоковые данные могут использоваться для информации сигнализации, используемой в системе 300. Информация сигнализации может содержать битовый поток В и/или информацию, в частности, количество точек облака точек, координаты и/или параметры настройки датчика.
Следует понимать, что сигнализацию можно реализовать разными способами. Например, один или несколько элементов синтаксиса, флагов и так далее могут использоваться для передачи информации сигнализации соответствующему декодеру согласно различным вариантам осуществления.
Система 300 может выдавать выходной сигнал на различные выходные устройства, включая дисплей 400, громкоговорители 500 и другие периферийные устройства 600. Согласно различным вариантам осуществления другие периферийные устройства 600 могут включать в себя одно или несколько из следующих устройств: автономный универсальный цифровой диск (DVR), проигрыватель дисков, стереосистему, систему освещения и другие устройства, которые выполняют функции согласно выходному сигналу системы 300.
Согласно различным вариантам осуществления сигналы управления передаются между системой 300 и дисплеем 400, громкоговорителями 500 или другими периферийными устройствами 600 с помощью протоколов, например, AV.Link, СЕС (Consumer Electronics Control - управление бытовой электроникой) или других протоколов связи, которые позволяют осуществлять управление устройством с устройства с вмешательством пользователя или без него.
Выходные устройства могут быть подключены к системе 300 с возможностью обмена данными с помощью специализированных соединений через соответствующие интерфейсы 360, 370 и 380.
Согласно альтернативному варианту выходные устройства можно подсоединить к системе 300 с помощью канала 700 передачи данных через интерфейс 350 передачи данных. Дисплей 400 и громкоговорители 500 могут быть объединены в единый блок вместе с другими компонентами системы 300 в электронном устройстве, например, в телевизоре.
Согласно различным вариантам осуществления интерфейс 360 дисплея может содержать драйвер дисплея, например, микросхему контроллера синхронизации (Т Con).
Согласно альтернативному варианту дисплей 400 и громкоговорители 500 могут быть отдельными от одного или нескольких других компонентов, например, если РЧ модуль входа 390 является частью отдельной телевизионной приставки. Согласно различным вариантам осуществления, в которых дисплей 400 и громкоговорители 500 могут быть внешними компонентами, выходной сигнал может подаваться по специальным выходным соединениям, включая, например, порты HDMI, порты USB или выходы СОМР.
В описаниях фиг. 1-29 описаны различные способы, и каждый из способов предусматривает одну или несколько стадий или действий для осуществления описанного способа. Кроме случаев, когда конкретный порядок стадий или действий требуется для надлежащей реализации способа, порядок и/или использование конкретных стадий и/или действий можно модифицировать или комбинировать.
Некоторые примеры описаны со ссылками на блочные схемы и блок-схемы алгоритмов. В них каждый блок представляет элемент схемы, модуль или часть кода, которая содержит одну или несколько выполняемых команд для реализации указанной логической функции. Следует также отметить, что в других реализациях указанные в блоках функции могут появляться не в указанном порядке. Например, два блока, которые показаны как последовательность, могут фактически выполняться практически одновременно, или блоки иногда могут выполняться в обратном порядке, в зависимости от предусмотренной функциональности.
Описанные в настоящем документе варианты реализации можно реализовать, например, как способ или процесс, как устройство, компьютерную программу, поток данных, битовый поток или сигнал. Даже если обсуждение ведется только в контексте единственной формы варианта осуществления (например, обсуждается только как способ), вариант осуществления обсуждаемых функций также может быть реализован в других формах (например, как устройство или компьютерная программа).
Способы можно реализовать, например, в виде процессора, что означает в общем случае обрабатывающие устройства, включая, например, компьютер, микропроцессор, интегральную схему или программируемое логическое устройство. Процессоры также включают в себя устройства передачи данных.
Дополнительно, способы могут быть реализованы с помощью команд, выполняемых процессором, и такие команды (и/или данные, созданные с помощью варианта реализации) могут храниться на машиночитаемом носителе данных. Машиночитаемый носитель данных может принять форму продукта в виде машиночитаемой программы, размещенной на одном или на нескольких машиночитаемых носителях, на которых хранится машиночитаемой код программы, который выполняется компьютером. Используемый в настоящем документе машиночитаемый носитель данных может рассматриваться в качестве долговременного носителя данных, который обладает присущей ему способностью хранить в себе информацию, а также присущей ему способностью извлекать из себя эту информацию. Машиночитаемый носитель данных может быть, помимо прочего, например, электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой, аппаратурой, устройством или их любой подходящей комбинацией из вышеперечисленного. Следует понимать, что приводимые ниже более конкретные примеры машиночитаемых носителей данных, которые можно применить в представленных вариантах осуществления, является просто иллюстративным и не исчерпывающим списком, что очевидно специалисту обычной квалификации в этой области техники: дискета для переносного компьютера; жесткий магнитный диск; постоянное запоминающее устройство (ПЗУ), электрически программируемое постоянное запоминающее устройство (ЭППЗУ или флеш-память); переносное постоянное запоминающее устройство на компакт-дисках (CD-ROM); оптическое запоминающее устройство; магнитное запоминающее устройство или любая подходящая комбинация из вышеперечисленного.
Команды могут образовать прикладную программу, в материальной форме записанную на машиночитаемый носитель.
Команды могут, например, содержатся в аппаратном обеспечении, встроенном программном обеспечении, программном обеспечении или в их комбинации. Команды могут находиться, например, в операционной системе, в отдельной прикладной программе, или в их комбинации. Процессор может быть описан, следовательно, в виде, например, как устройства, выполненного с возможностью выполнять процесс, так и устройства, которое содержит машиночитаемый носитель данных (в частности, запоминающее устройство) с хранящимися командами для выполнения процесса. Более того, машиночитаемый носитель данных может хранить, в дополнение к командам или вместо них, значения данных, созданные с помощью варианта реализации.
Устройство можно реализовать, например, в виде соответствующих аппаратных средств, программного обеспечения, и встроенного программного обеспечения. Примеры таких устройств включают в себя персональные компьютеры, ноутбуки, смартфоны, планшетные компьютеры, цифровые мультимедийные приставки к телевизорам, цифровые телевизионные приемники, персональные системы видеозаписи, бытовые приборы с выходом в интернет, нашлемные дисплеи (HMD, очки виртуальной реальности), проекторы (мультимедийные проекторы), «пещеры» (системы с многочисленными дисплеями), серверы, видеокодеры, видеодекодеры, постпроцессоры, обрабатывающие сигнал с видеодекодера, препроцессоры, подающие сигнал на видеокодер, веб-серверы, приставки к телевизорам и любые другие устройства для обработки облака точек, видео или изображения или другие устройства передачи данных. Как должно быть понятно, оборудование может быть мобильным и даже установленным в подвижном транспортном средстве.
Программное обеспечение для компьютера может выполняться процессором 310, или аппаратными средствами, или комбинацией аппаратного и программного обеспечения. В качестве не имеющего ограничительного характера примера, варианты осуществления могут быть реализованы с помощью одной или нескольких интегральных схем. Память 320 может быть любого типа, подходящего для технической среды, и может быть реализована с использованием любой подходящей технологии хранения данных, к примеру, устройств оптической памяти, устройств магнитной памяти, устройств полупроводниковой памяти, постоянного запоминающего устройства и съемного модуля памяти, в качестве не имеющих ограничительного характера примеров. Процессор 310 может быть любого типа, подходящего для технической среды, и может включать в себя один или несколько микропроцессоров, компьютеры общего назначения, компьютеры специального назначения и микропроцессоры с многоядерной архитектурой, в качестве не имеющих ограничительного характера примеров.
Как будет очевидно специалисту обычный квалификации в этой области техники, в реализациях может создаваться множество сигналов, отформатированных для пересылки информации, которую можно, например, сохранить или передать. Такая информация может включать в себя, например, команды для осуществления способа, или данные, созданные согласно одному из описанных вариантов реализации. Например, сигнал может быть отформатирован для пересылки битового потока описываемого варианта осуществления. Такой сигнал может быть отформатирован, например, как электромагнитная волна (например, используя радиочастотную часть спектра) или как сигнал базовых частот. Форматирование может включать в себя, например, кодирование потока данных и модулирование несущей с помощью закодированного потока данных. Информация, которую переносит сигнал, может быть, например, аналоговой или цифровой информацией. Сигнал, как это известно, можно передавать по ряду различных проводных или беспроводных каналов. Сигнал можно сохранить на машиночитаемом носителе данных.
Используемая здесь терминология служит только для целей описания конкретных вариантов осуществления и не предназначена иметь ограничительный характер. Как используется в настоящем документе, формы единственного числа имен существительных также включают в себя ссылки на множественное число, кроме случаев, когда контекст явно указывает иное. Следует также понимать, что термины «содержит/включает в себя», и/или «содержащий/включающий в себя» при использовании в этом описании могут указывать наличие заявленных, например, признаков, систем, стадий, операций, элементов и/или компонентов, но не препятствуют наличию или добавлению одного или нескольких других признаков, систем, стадий, операций, элементов, компонентов и/или их групп. Более того, когда элемент указан как являющийся «реагирующим» на другой элемент или «подсоединенным» к нему, он может непосредственно реагировать на другой элемент или быть к нему подсоединенным, либо могут присутствовать промежуточные элементы. В отличие от этого, когда элемент указан как являющийся «непосредственно реагирующим» на другой элемент или «непосредственно подсоединенным» к нему, то нет никаких промежуточных элементов.
Следует понимать, что использование любой из следующих конструкций «/», «и/или» и «по меньшей мере, один из», например, в случаях «А/В», «А и/или В» и «по меньшей мере, один из А и В» предназначено для описания выбора только первого из перечисленных вариантов (А), или выбора только второго из перечисленных вариантов (В), или выбора обоих вариантов (А и В). В качестве следующего примера, в случаях «А, В и/или С» и «по меньшей мере, один из А, В и С» эти формулировки предназначены для описания выбора только первого из перечисленных вариантов (А), или выбора только второго из перечисленных вариантов (В), или выбора только третьего из перечисленных вариантов (С), или выбора только первого и второго из перечисленных вариантов (А и В), или выбора только первого и третьего из перечисленных вариантов (А и С), или выбора только второго и третьего из перечисленных вариантов (В и С), или выбора всех трех вариантов (А и В и С). Это может быть расширено на любое количество перечисленных вариантов, и это очевидно специалисту обычной квалификации в этой и связанных областях техники.
В настоящем документе используются различные численные значения. Конкретные значения могут быть приведены в качестве примеров и описанные аспекты не ограничиваются этими конкретными значениями.
Следует понимать, что хотя термины первый, второй и т.д. могут быть использованы в настоящем документе для описания различных элементов, эти элементы не ограничены такими терминами. Такие термины используются только для того, чтобы отличить один элемента от другого. Например, первый элемент может быть назван вторым элементом, и, аналогичным образом, второй элемент может быть назван первым элементом, без отклонения от принципов настоящего изобретения. Никакого упорядочивания не предполагается между первым элементом и вторым элементом.
Ссылка на «один пояснительный (иллюстративный) вариант осуществления» или «пояснительный (иллюстративный) вариант осуществления» или «одну реализацию» или «реализацию», а также их различные варианты, часто используется для указания, что конкретная функция, структура, характеристика и так далее (описанная в связи с вариантом осуществления/реализации) включена, по меньшей мере, в один вариант осуществления/реализации. Таким образом, фразы «согласно одному пояснительному (иллюстративному) варианту осуществления» или «согласно пояснительному (иллюстративному) варианту осуществления» или «согласно одной реализации» или «согласно реализации», а также их любые другие варианты, появляющийся в различных местах всего настоящего документа, не обязательно все указывают на тот же самый вариант осуществления.
Аналогичным образом, ссылка в настоящем документе на «согласно пояснительному (иллюстративному) варианту осуществления/примеру/реализации» или «в пояснительном (иллюстративном) варианте осуществления/примере/реализации», а также их различные варианты, часто используется для указания, что конкретная функция, структура, характеристика и так далее (описанная в связи с пояснительным (иллюстративным) вариантом осуществления/примера/реализации) может быть включена, по меньшей мере, в один пояснительный (иллюстративный) вариант осуществления/пример/реализацию. Таким образом, появляющиеся в различных местах описания фразы «согласно пояснительному (иллюстративному) варианту осуществления/примеру/реализации» или «в пояснительном (иллюстративном) варианте осуществления/примера/реализации» не обязательно все указывают на тот же самый пояснительный (иллюстративный) вариант осуществления/пример/реализацию или на отдельный или альтернативный пояснительный (иллюстративный) вариант осуществления/пример/реализацию и не обязательно являются взаимно исключающими с другим пояснительным (иллюстративным) вариантом осуществления/примером/реализацией.
Появляющиеся в формуле изобретения номера позиций приведены только для иллюстрации и не имеют никакого ограничительного характера для объема формулы настоящего изобретения. Хотя это не описано явно, представленные варианты осуществления/примеры и варианты могут применяться в любой комбинации или в упрощенной комбинации.
Если на фигуре показана блок-схема алгоритма, то следует понимать, что она также представляет блок-схему соответствующего устройства. Аналогичным образом, если на фигуре показана блок-схема, то следует понимать, что она также представляет блок-схему алгоритма соответствующего способа/процесса.
Хотя на некоторых схемах приведены стрелки на путях передачи данных для указания основного направления передачи данных, следует понимать, что передача данных может происходить в направлении, противоположном к показанному стрелками.
Различные варианты осуществления включают в себя декодирование. «Декодирование», как используется в настоящем документе, может включать в себя все или часть процессов, выполняемых, например, с принятым каркасом облака точек (включая, возможно, принятый битовый поток, в котором закодирован один или несколько каркасов облака точек), чтобы получить окончательный выходной сигнал, пригодный для просмотра или дальнейшей обработки при восстановлении домена облака точек. Согласно различным вариантам осуществления такие процессы включают в себя один или несколько из процессов, обычно выполняемых декодером. Согласно различным вариантам осуществления такие процессы, например, также или альтернативно включают в себя процессы, выполняемые согласно различным вариантам осуществления декодера, описанным в настоящем документе.
В качестве дальнейших примеров, согласно одному варианту осуществления «декодирование» может означать только деквантование, согласно другому варианту осуществления «декодирование» может означать энтропийное декодирование, согласно иному другому варианту осуществления «декодирование» может означать только дифференциальное декодирование, а согласно еще одному другому варианту осуществления «декодирование» может означать комбинацию энтропийного декодирования и дифференциального декодирования. Предназначена ли фраза «процесс декодирования» для указания конкретно на подмножество операций или главным образом на более широкий процесс декодирования, будет понятно на основе контекста конкретных описаний и считается, что это будет хорошо понятно специалистам в этой области техники.
Различные варианты осуществления включают в себя кодирование. Аналогичным образом к приведенному выше обсуждению понятия «декодирование», понятие «кодирование», как оно используется в настоящем документе, может включать в себя все или часть процессов, выполняемых, например, с входным каркасом облака точек с целью создания закодированного битового потока. Согласно различным вариантам осуществления такие процессы включают в себя один или несколько из процессов, обычно выполняемых кодером. Согласно различным вариантам осуществления такие процессы также или альтернативно включают в себя процессы, выполняемые согласно различным вариантам осуществления кодера, описанным в настоящем документе.
В качестве дальнейших примеров, согласно одному варианту осуществления «кодирование» может означать только квантование, согласно другому варианту осуществления «кодирование» может означать только энтропийное кодирование, согласно иному другому варианту осуществления «кодирование» может означать только дифференциальное кодирование, а согласно еще одному другому варианту осуществления «кодирование» может означать комбинацию энтропийного кодирования и дифференциального кодирования. Может ли быть фраза «процесс кодирования» предназначена для указания конкретно на поднабор операций или главным образом на более широкий процесс кодирования, будет понятно на основе контекста конкретных описаний и считается, что это будет хорошо понятно специалистам в этой области техники.
Кроме того, в настоящем документе может упоминаться «получение» различных частей информации. Получение информации может включать в себя одно или несколько из, например, следующих действий: оценивание информации, вычисление информации, прогнозирование информации или извлечение информации из памяти.
Более того, в настоящем документе может упоминаться «обращение» к различным частям информации. Обращение к информации может включать в себя одно или несколько из, например, следующих действий: получение информации, извлечение информации (например, из памяти или из битового потока), сохранение информации, перемещение информации, копирование информации, вычисление информации, определение информации, прогнозирование информации или оценивание информации.
Кроме того, в настоящем документе может упоминаться «принятие» различных частей информации. Термин «принятие», как и «обращение», подразумевает широкую трактовку. Принятие информации может включать в себя одно или несколько из, например, следующих действий: обращение к информации или извлечение информации (например, из памяти или из битового потока). Более того, «принятие» обычно происходит, тем или иным образом, во время таких операций как, например, сохранение информации, обработка информации, передача информации, перемещение информации, копирование информации, удаление информации, вычисление информации, определение информации, прогнозирование информации или оценивание информации.
Так же, как используется в настоящем документе, слово «сигнал» предназначено, помимо других вещей, для указания чего-то в соответствующем декодере. Например, согласно некоторым вариантом осуществления, кодер сигнализирует конкретную информацию, в частности, количество точек облака точек или координаты или параметры настройки датчика. Таким образом, согласно варианту осуществления тот же самый параметр может использоваться как на стороне кодера, так и на стороне декодера. Следовательно, например, кодер может передавать (явным образом сигнализировать) конкретный параметр декодеру, так что декодер может использовать тот же самый конкретный параметр. И наоборот, если у декодера уже есть конкретный параметр, а также другие, то сигнализацию можно использовать без передачи (подразумеваемая сигнализация), чтобы просто позволить декодеру узнать и выбрать конкретный параметр. За счет исключения передачи любых фактических функций в различных вариантах осуществления достигается экономия битов. Следует понимать, что сигнализацию можно реализовать разными способами. Например, один или несколько элементов синтаксиса, флагов и так далее используются для передачи информации соответствующему декодеру согласно различным вариантам осуществления. Хотя в предыдущем примере используется глагольная форма от слова «сигнал», слово «сигнал» может также использоваться в настоящем документе в качестве имени существительного.
Был описан ряд вариантов реализации. Тем не менее, следует понимать, что можно выполнить различные модификации. Например, элементы различных вариантов реализации можно объединять, дополнять ими друг друга, модифицировать или удалять для создания других вариантов реализации. Дополнительно, специалисту обычной квалификации будет понятно, что другие структуры и процессы можно подставлять вместо раскрытых, и что получающиеся варианты реализации будут выполнять, по меньшей мере, существенно те же самые функции, и, по меньшей мере, существенно тем же самым образом, чтобы достичь, по меньшей мере, существенно тех же самых результатов, как у раскрытых вариантов реализации. Соответственно эти и другие варианты реализации предложены в настоящем документе.
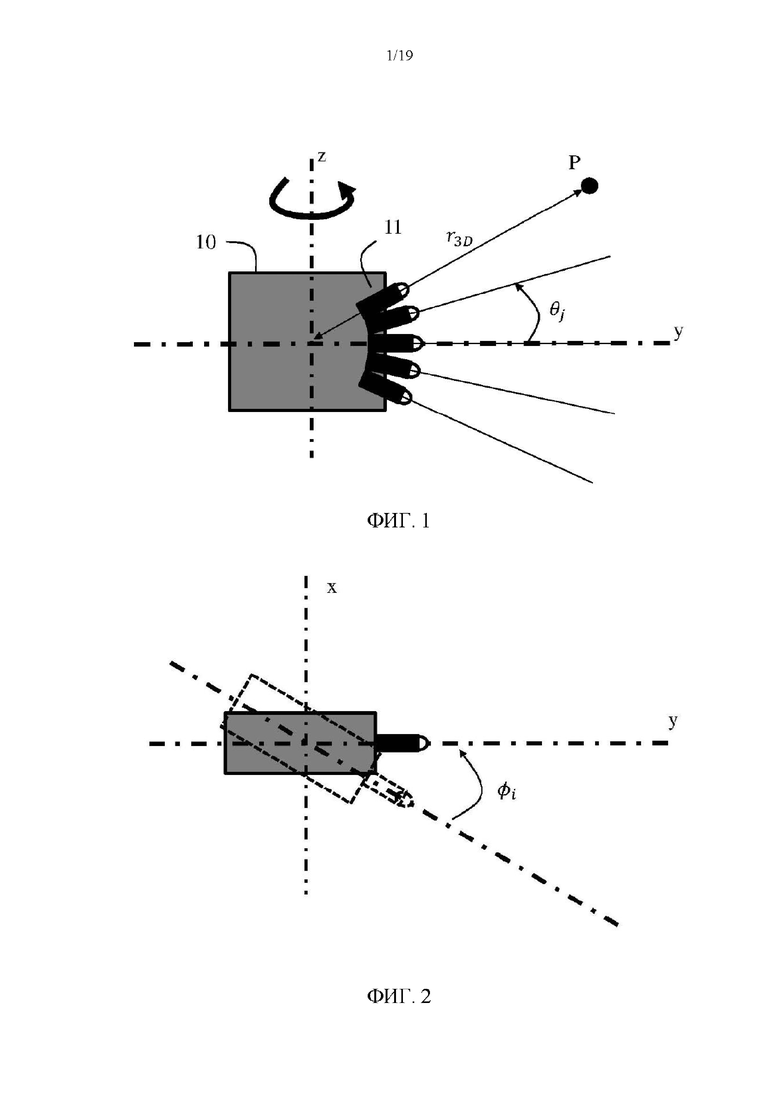
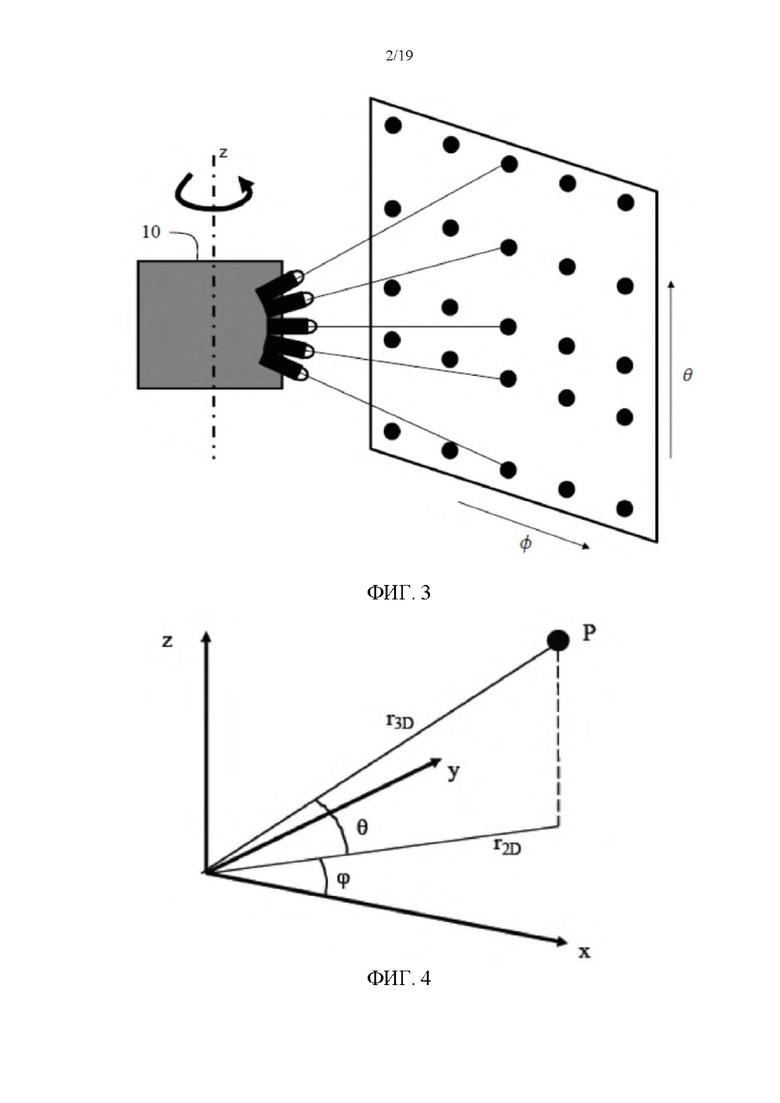
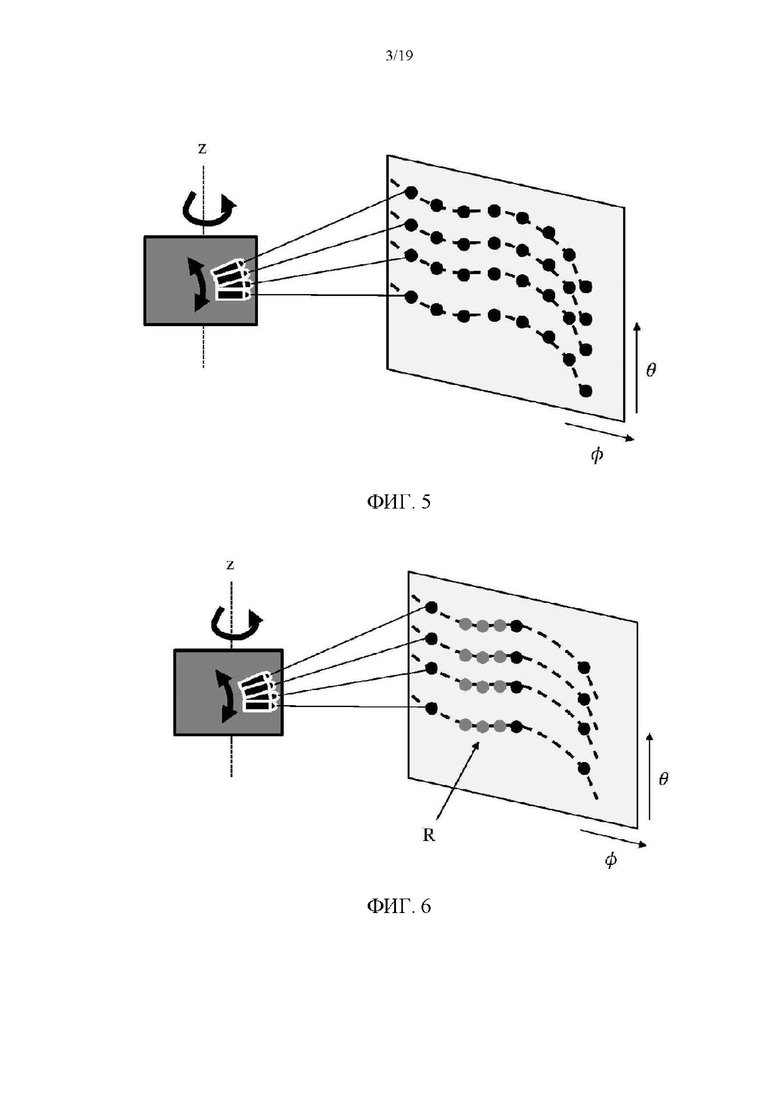
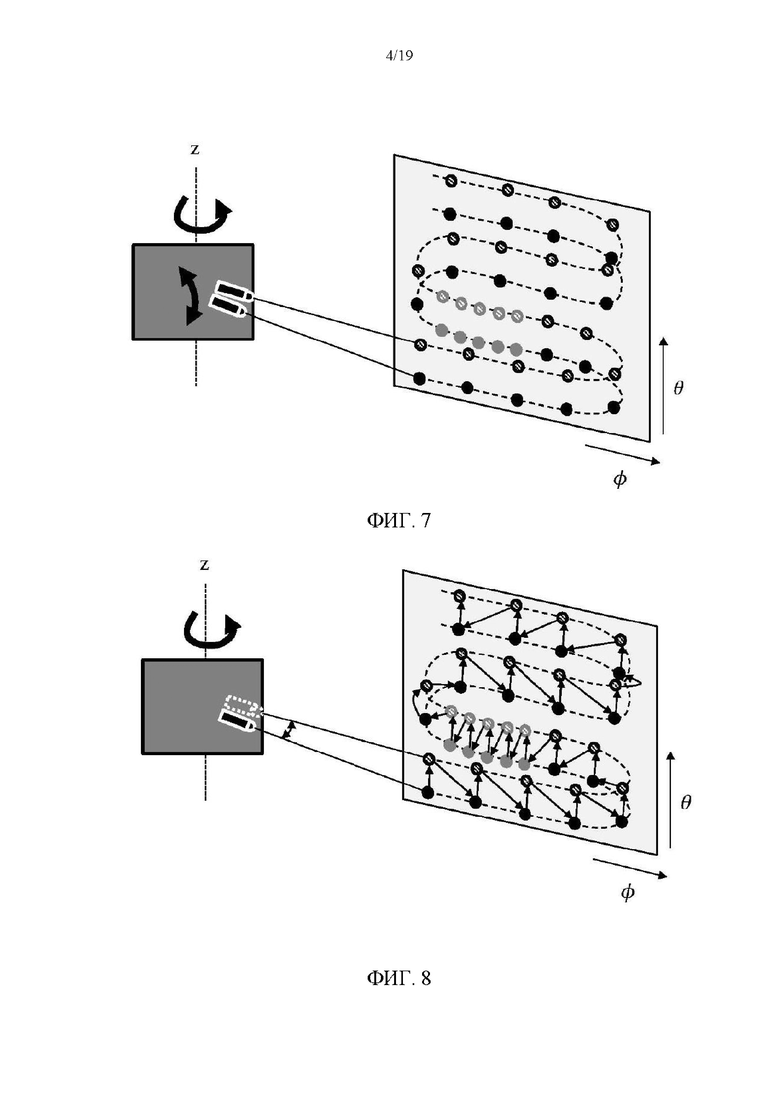
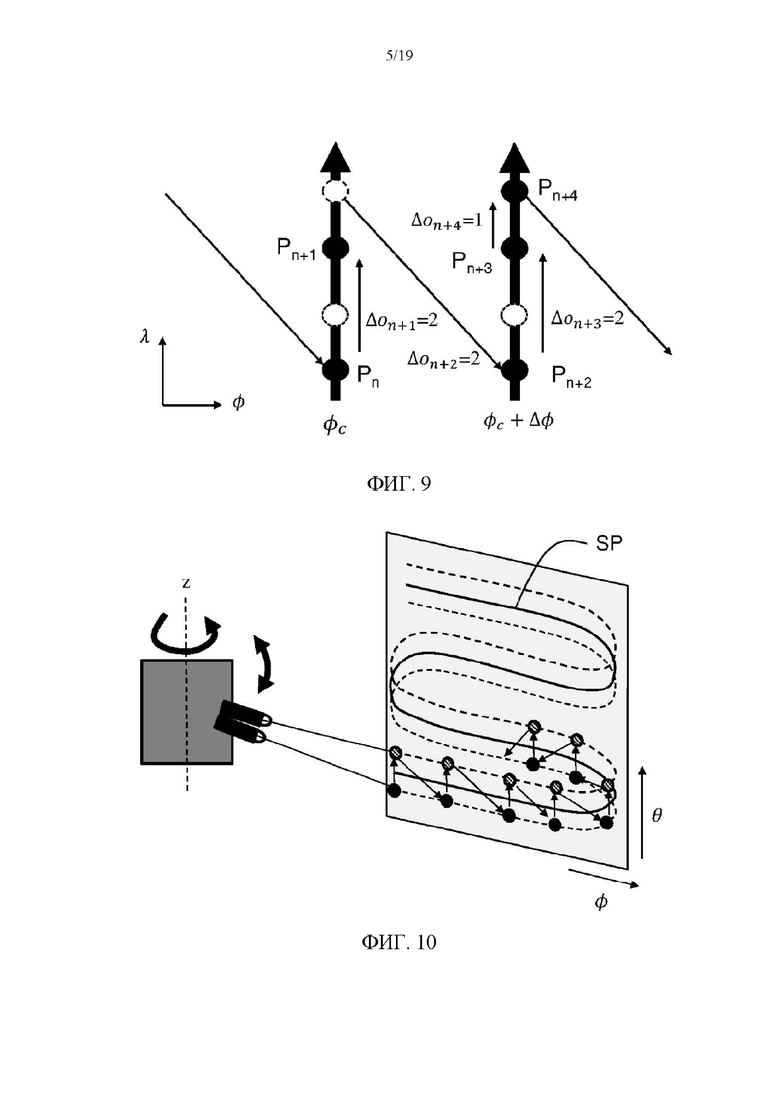
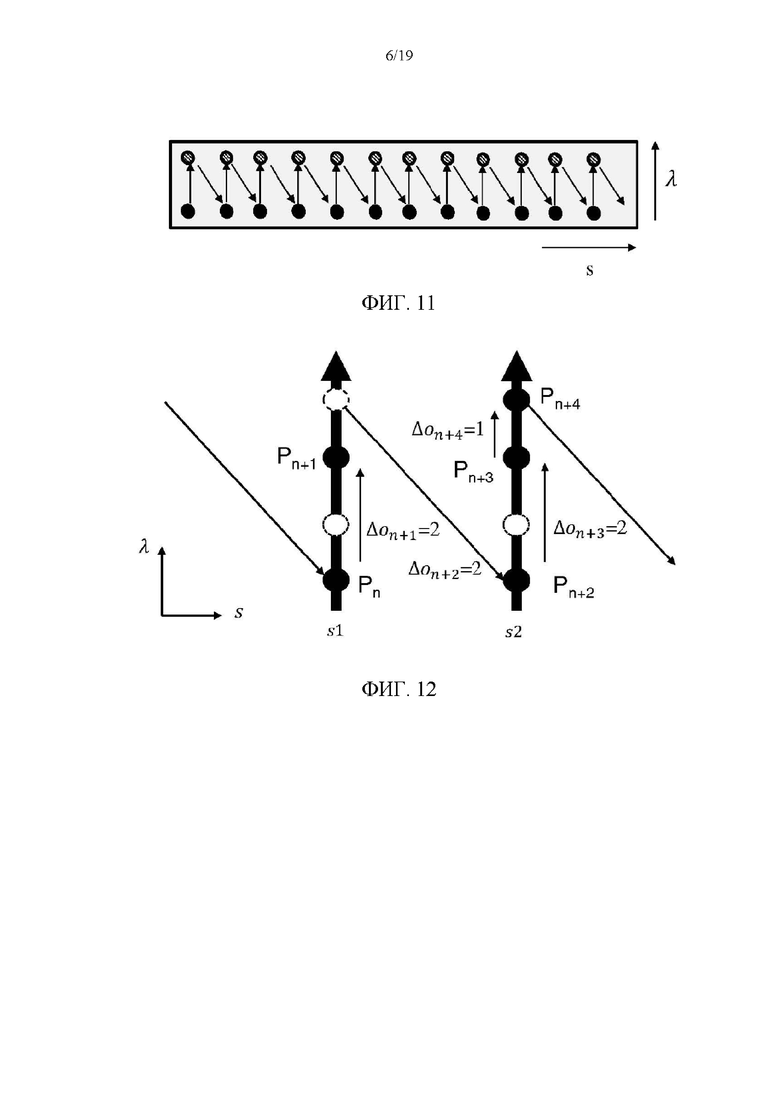
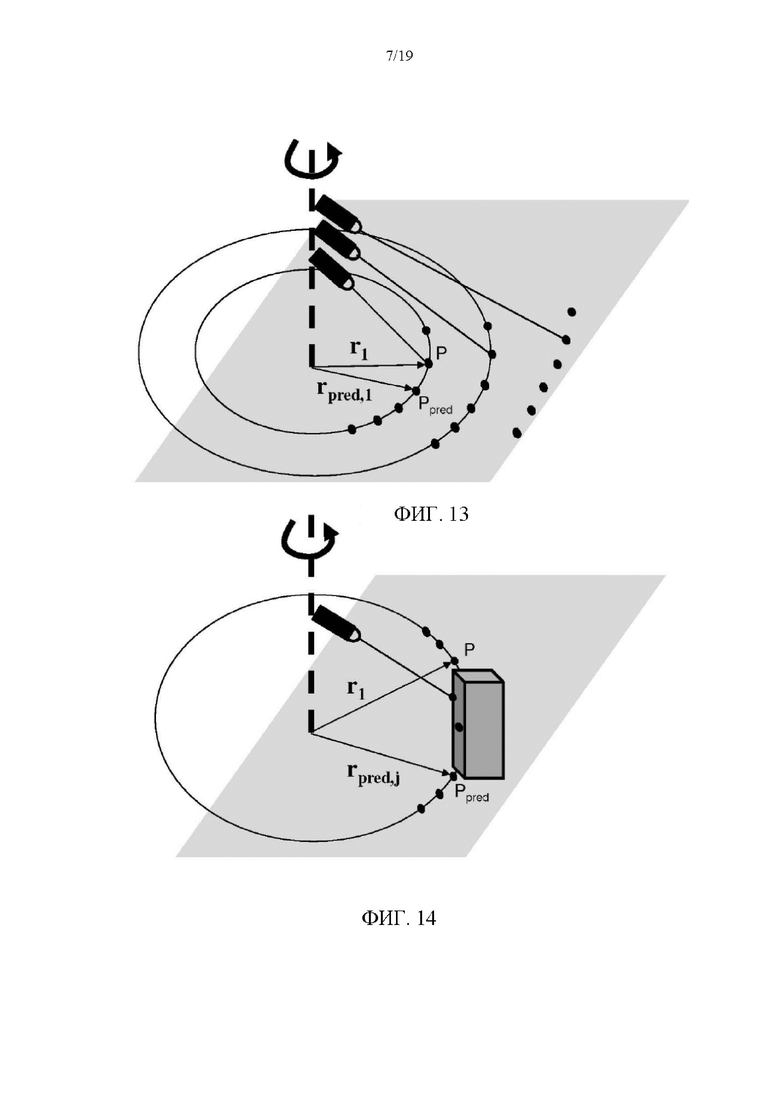
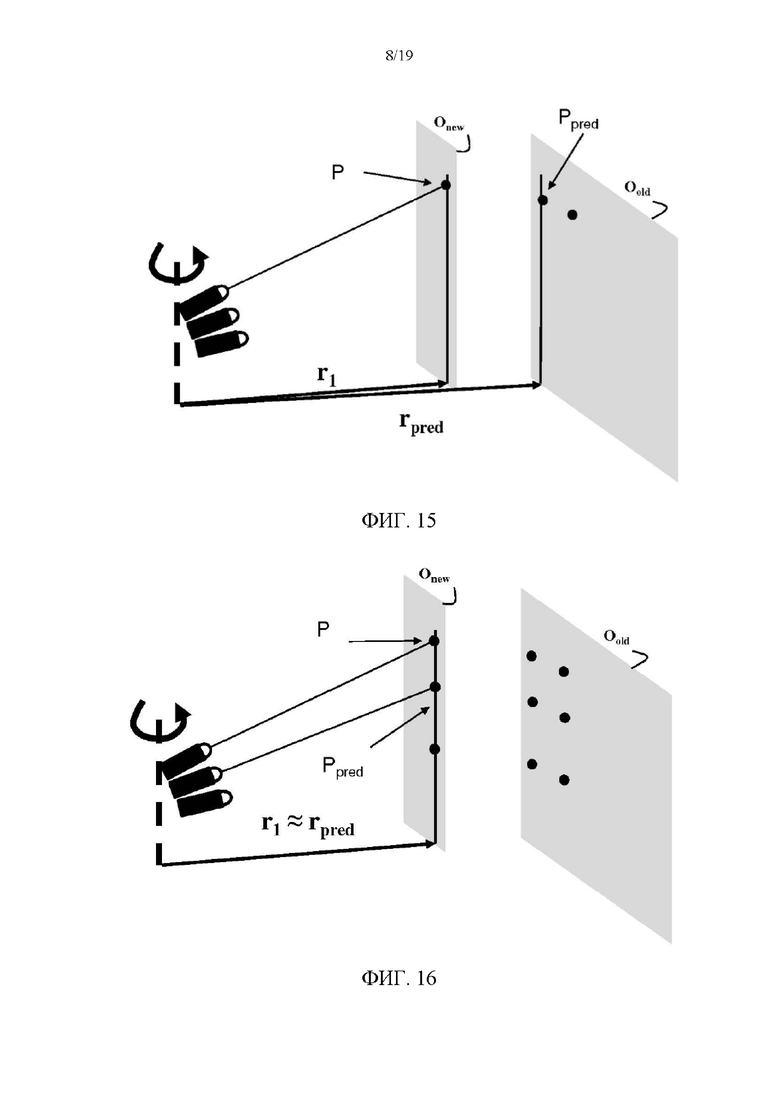
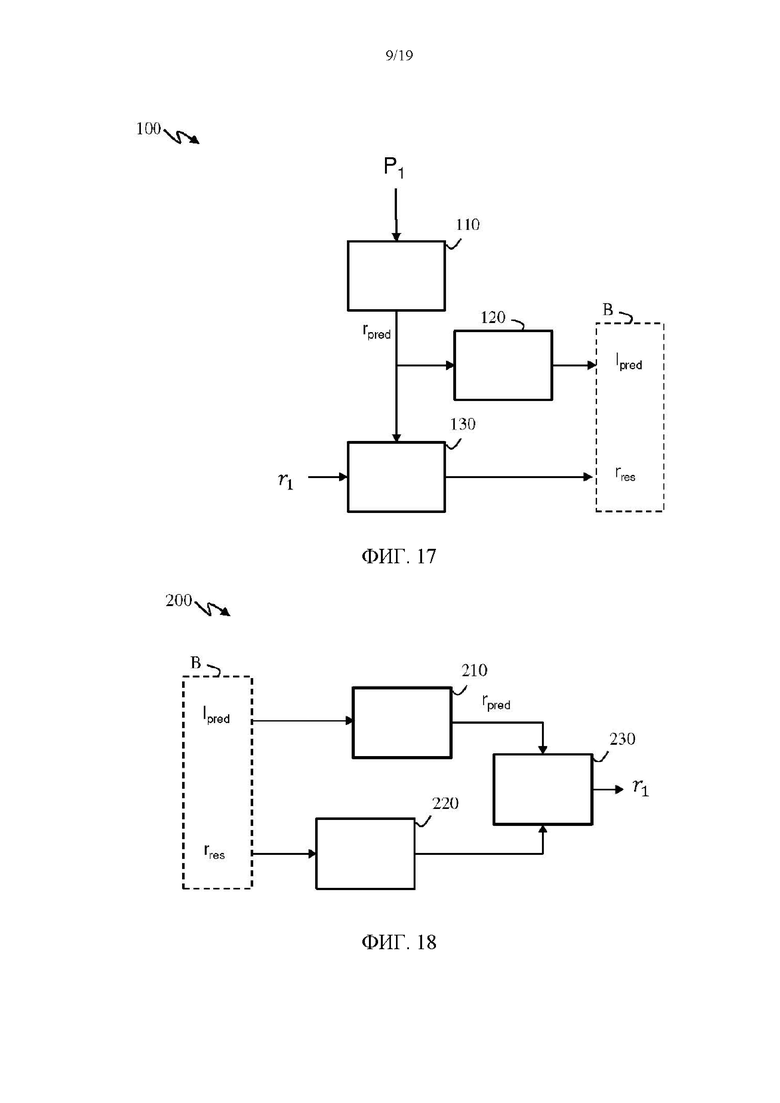
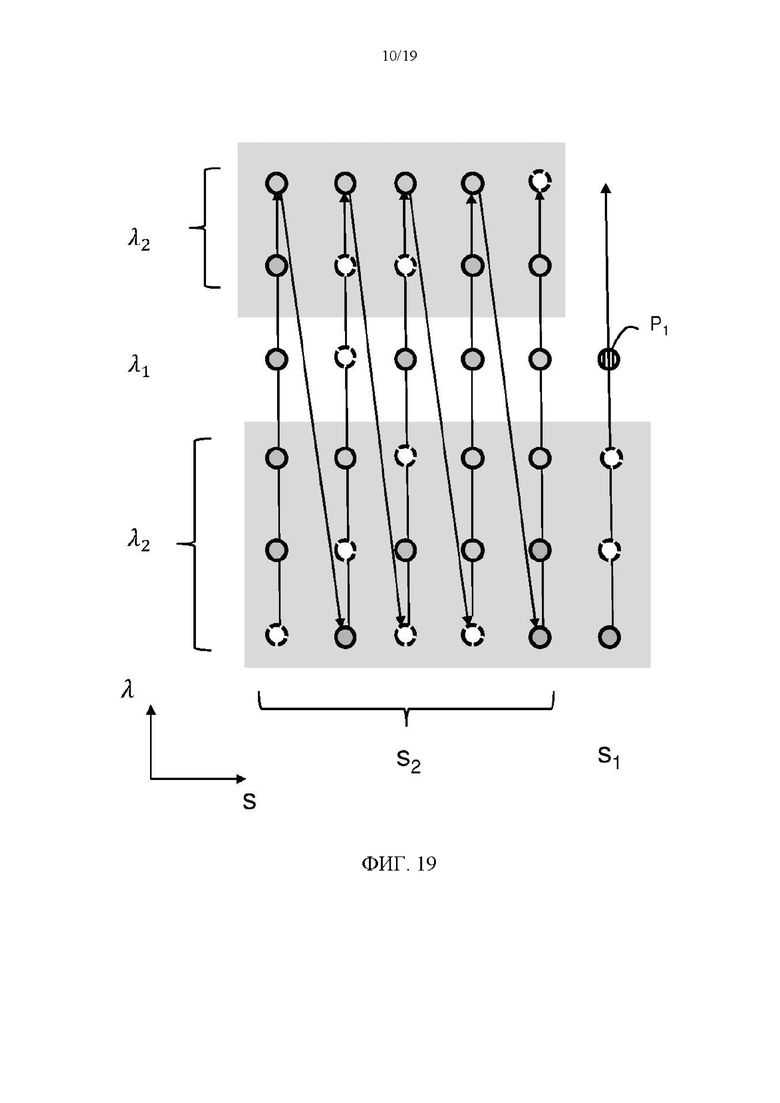
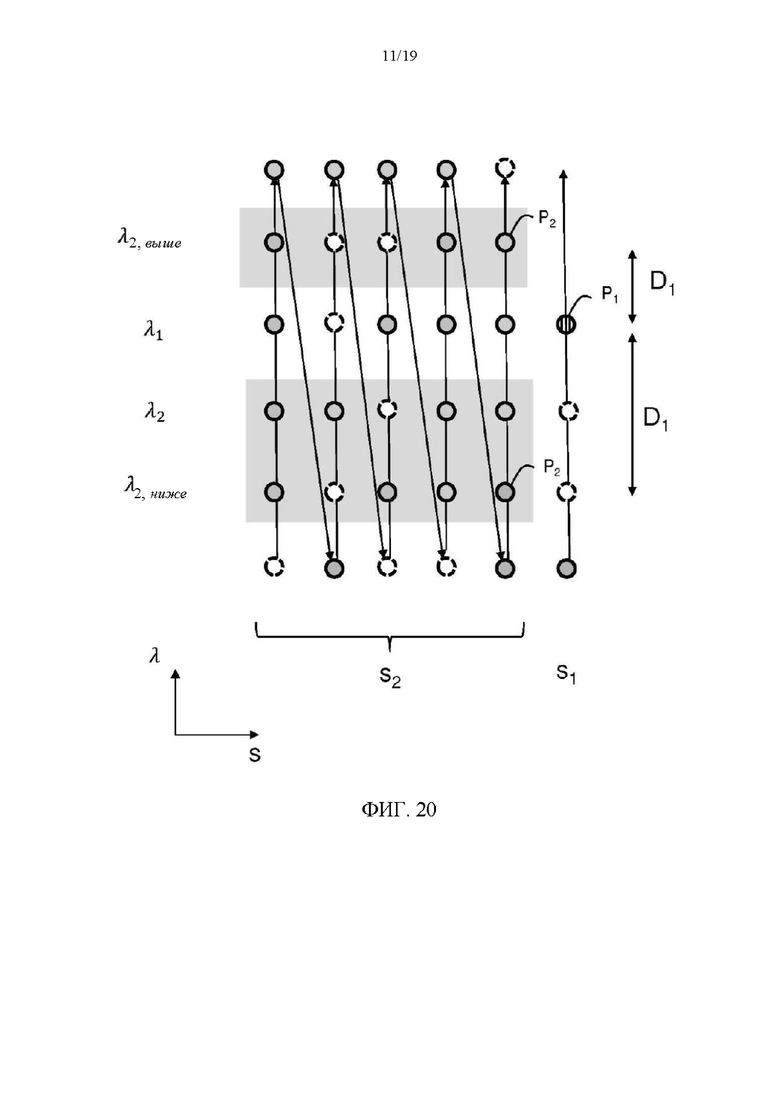
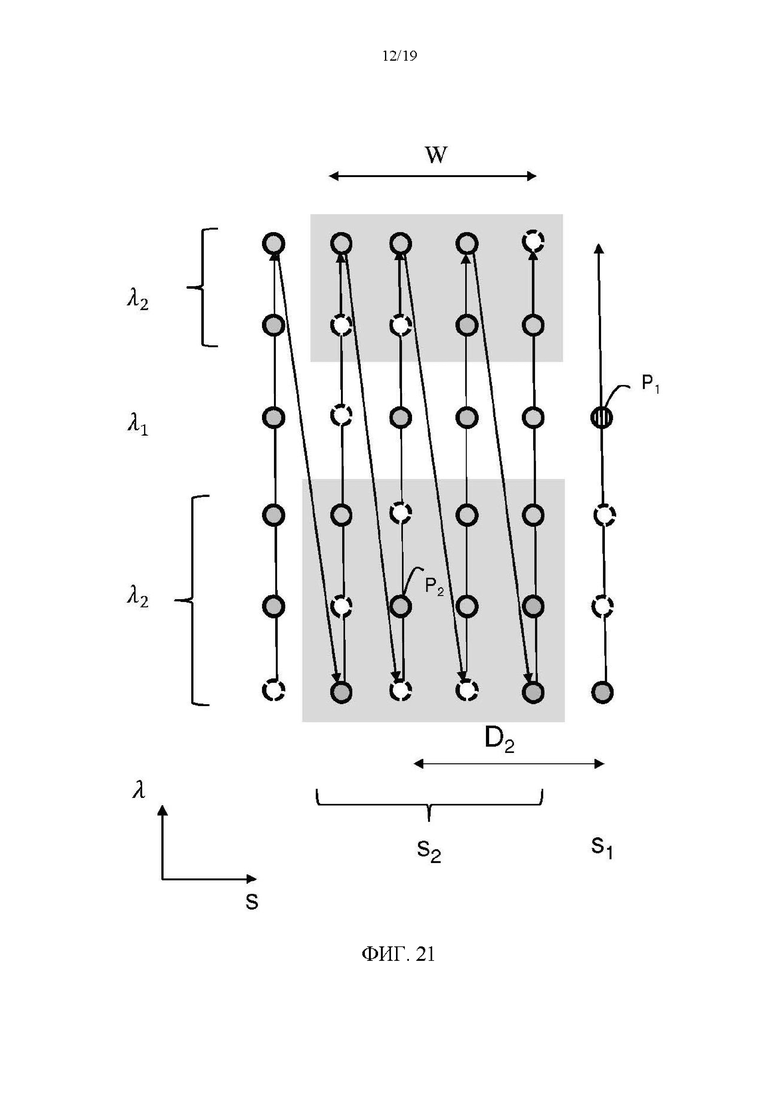
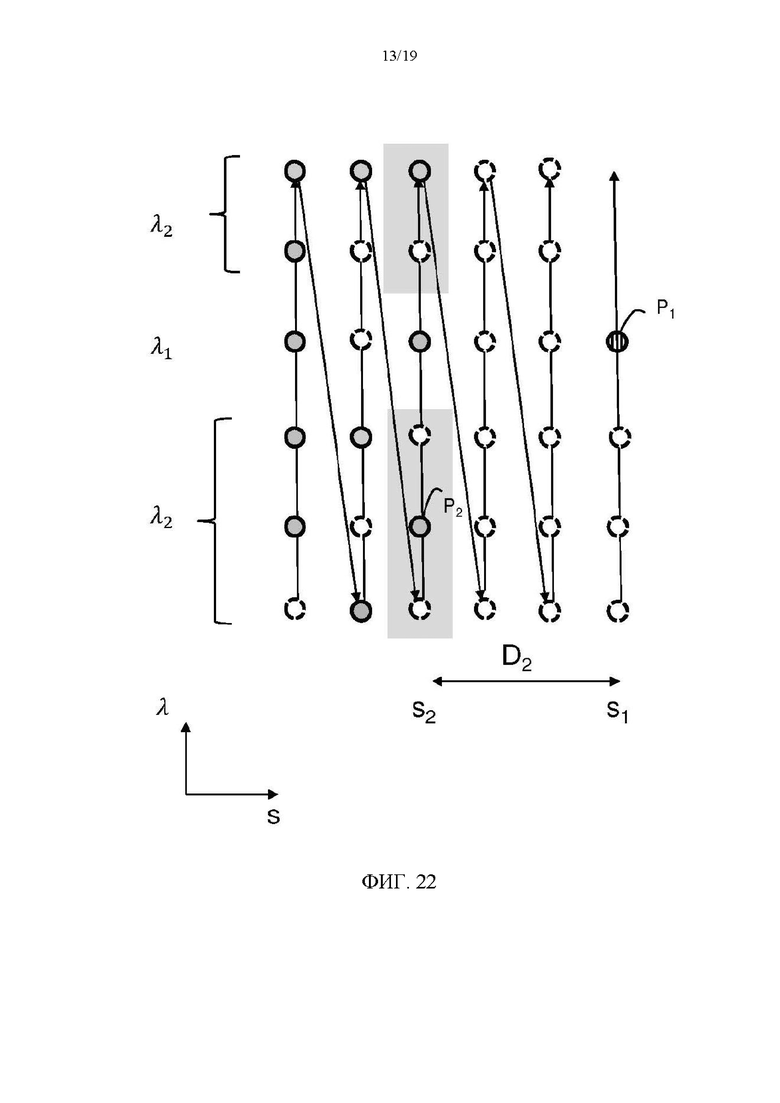
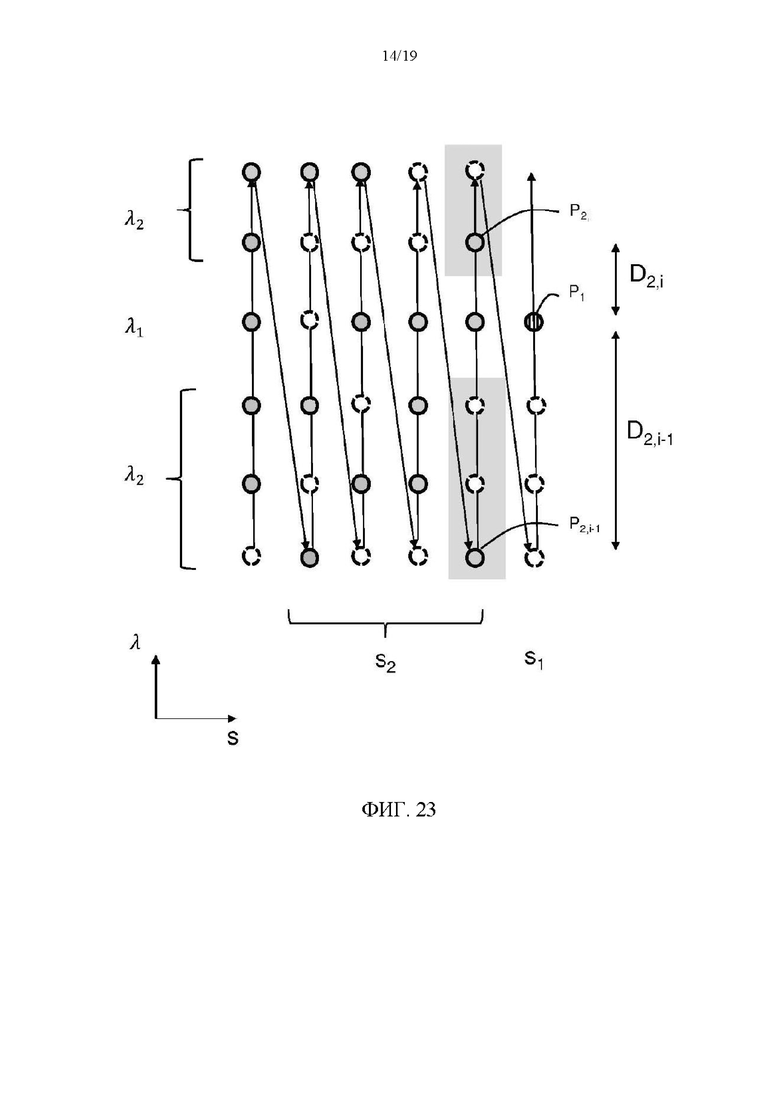
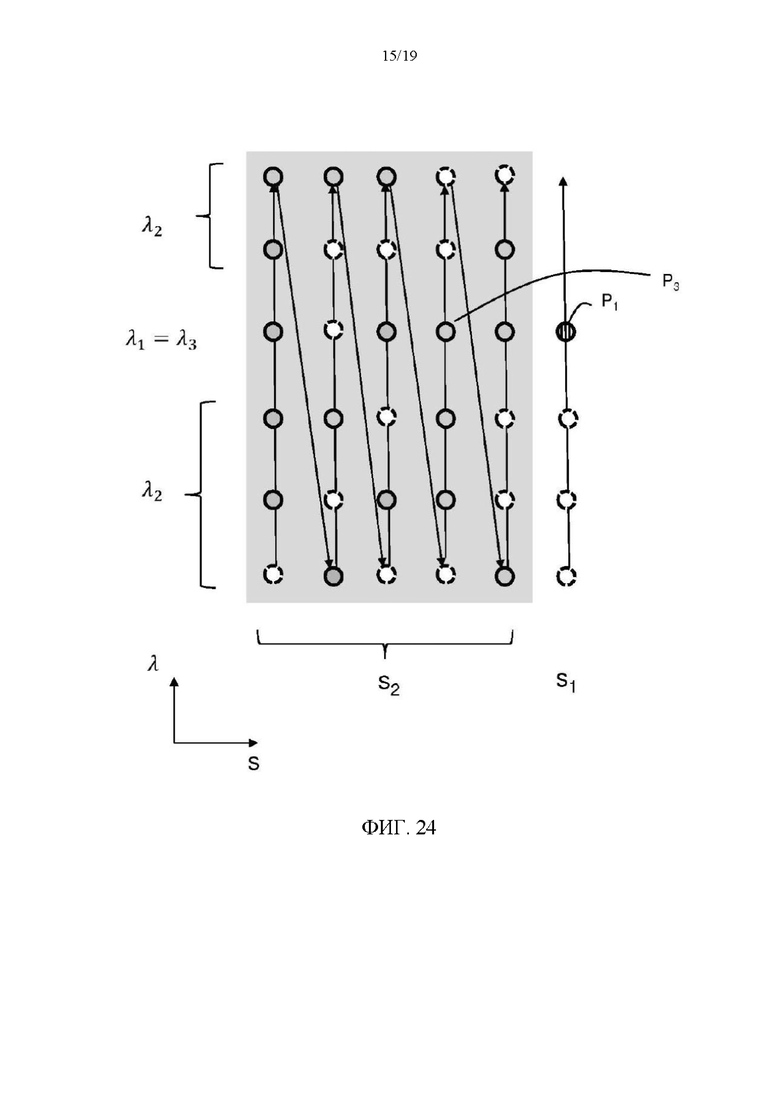
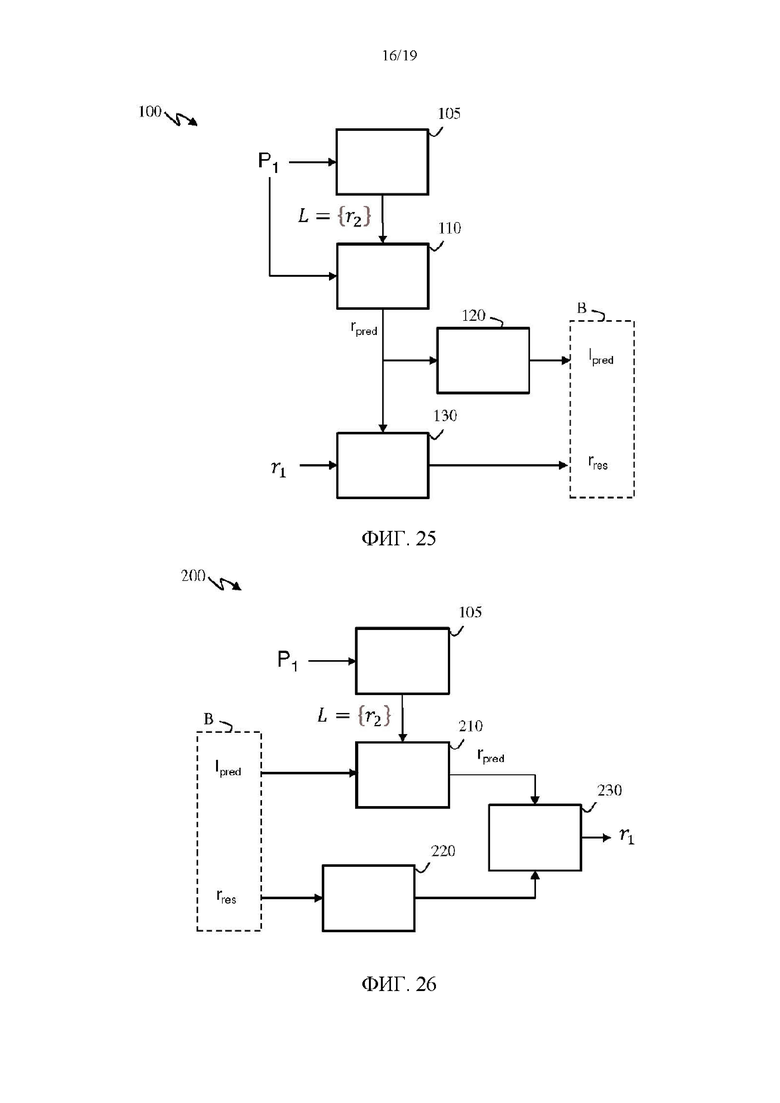
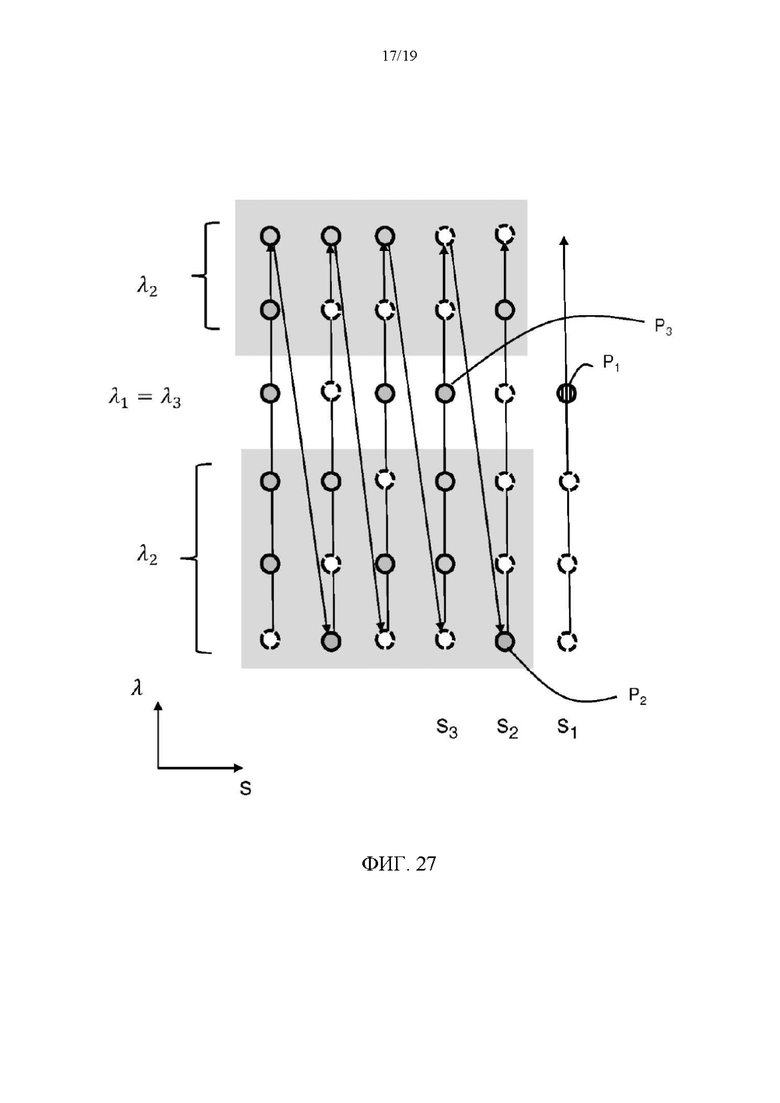
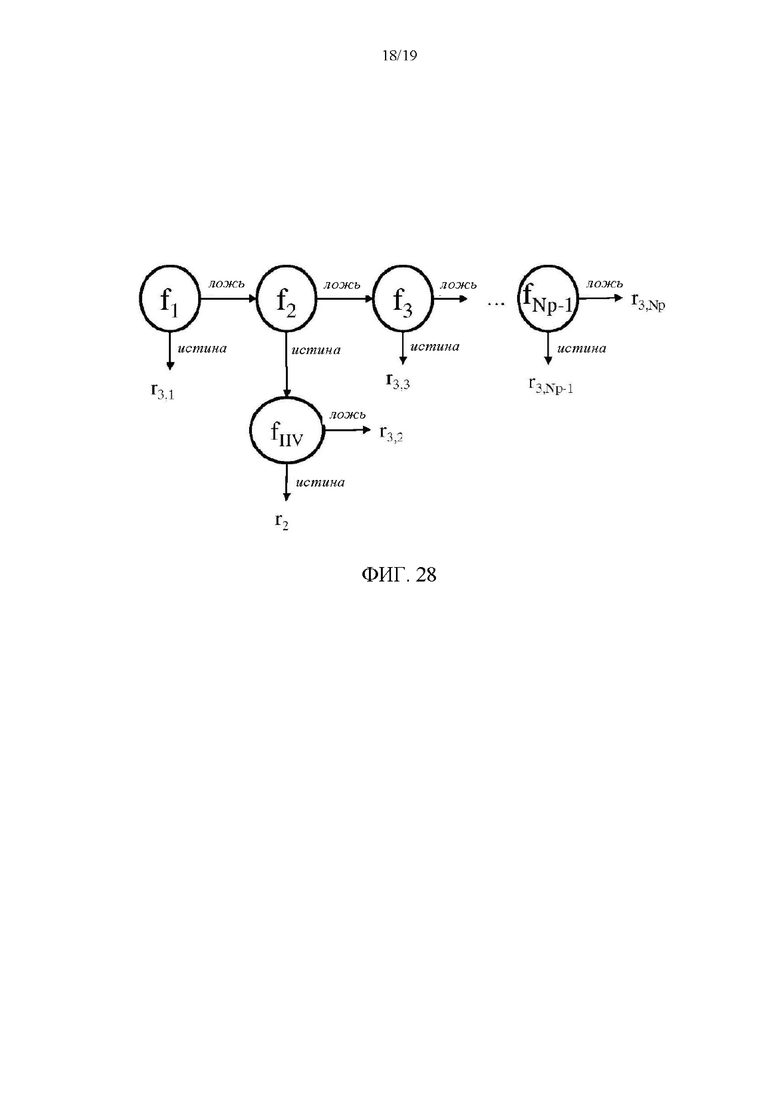
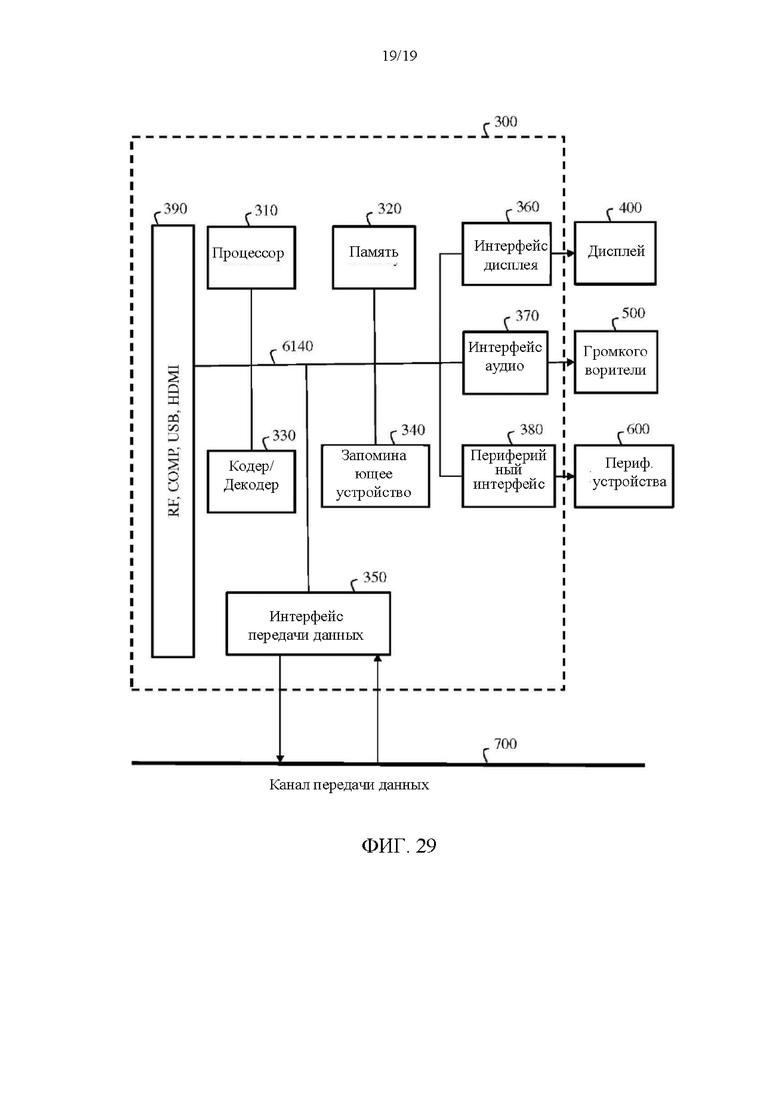
В настоящем изобретении предложены способы и устройства для кодирования/декодирования геометрических данных облака точек. Технический результат заключается в оптимизации кодирования/декодирования за счет улучшенного выбора предсказываемого радиуса обнаруженной точки. В способе кодирования в битовый поток геометрических данных облака точек выполняют получение списка (L={r_2}) возможных радиусов для первой заполненной точки (Р1) грубого приближения, имеющей индекс (λ_1) первого датчика, индекс (s1) первой выборки, и которая ассоциирована с первым радиусом (r_1), этот список возможных радиусов содержит, по меньшей мере, один второй радиус (r2), ассоциированный, по меньшей мере, с одной второй заполненной точкой (Р2) грубого приближения, у которой индекс (λ_2) второго датчика отличается от индекса (λ_1) первого датчика и у которой индекс (s2) второй выборки не превышает индекса (s1) первой выборки, причем, по меньшей мере, одна вторая заполненная точка (Р2) грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с, по меньшей мере, одной второй заполненной точкой (Р2) грубого приближения, вероятно, снижает динамический диапазон невязки (rres) предсказываемого радиуса, когда первый радиус предиктивно кодируется; выбор для первой заполненной точки (Р1) грубого приближения выбираемого предсказываемого радиуса (rpred) из списка (L={r_2}) возможных радиусов; кодирование в битовый поток данных (Ipred), показывающих выбранный предсказываемый радиус (rpred) в списке (L={r_2}) возможных радиусов; и предиктивное кодирование в битовый поток невязки (rres) радиуса между первым радиусом (r_1) и выбранным предсказываемым радиусом (rpred). 4 н. и 14 з.п. ф-лы, 29 ил.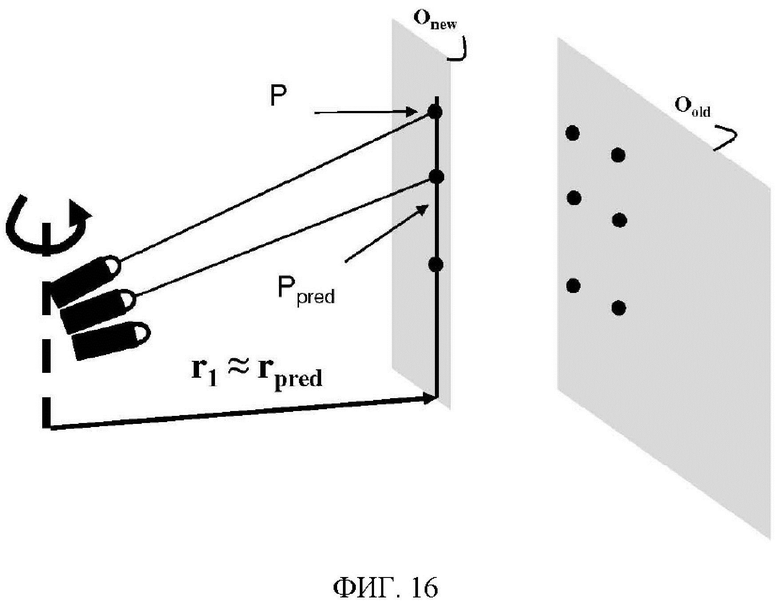
1. Способ кодирования в битовый поток геометрических данных облака точек, обнаруженных с помощью датчиков в соответствии с путем обнаружения, определенным по характеристикам датчика в двумерном угловом координатном пространстве, содержащим азимутальную координату, представляющую азимутальный угол, соответствующий углу обнаружения датчика относительно опорного направления, и угол наклона, представляющий угол наклона датчика относительно горизонтальной опорной плоскости, путь обнаружения используется для обнаружения точек облака точек согласно с индексами выборки, ассоциированными с моментами времени обнаружения, и индексами датчиков, ассоциированными с датчиками, точка грубого приближения определяется в двумерном пространстве одним индексом выборки и одним индексом датчика, упорядоченные точки грубого приближения получаются путем упорядочения точек грубого приближения на основе индексов выборки и индексов датчиков, одна упорядоченная точка грубого приближения заполняется, когда геометрические данные облака точек связаны с упорядоченной точкой грубого приближения, каждая заполненная точка грубого приближения располагается в двумерном пространстве с помощью индекса датчика, ассоциированного с датчиком, который обнаружил точку облака точек, ассоциированную с заполненной точкой грубого приближения, и индексом выборки, ассоциированным с моментом времени обнаружения, в котором точка облака точек была обнаружена, причем каждая заполненная точка грубого приближения ассоциирована с радиусом, представленным расстоянием между точкой облака точек и опорной точкой датчика, причем способ предусматривает следующие стадии:
- получение (105) списка (L={r2}) возможных радиусов для первой заполненной точки (P1) грубого приближения, имеющей индекс (λ1) первого датчика, индекс (s1) первой выборки, и которая ассоциирована с первым радиусом (r1), этот список возможных радиусов содержит, по меньшей мере, один второй радиус (r2), ассоциированный, по меньшей мере, с одной второй заполненной точкой (Р2) грубого приближения, у которой индекс (λ2) второго датчика отличается от индекса (λ1) первого датчика и у которой индекс (s2) второй выборки не превышает индекса (s1) первой выборки, причем, по меньшей мере, одна вторая заполненная точка (Р2) грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с, по меньшей мере, одной второй заполненной точкой (Р2) грубого приближения, вероятно, снижает динамический диапазон невязки (rres) предсказываемого радиуса, когда первый радиус предиктивно кодируется;
- выбор (110) для первой заполненной точки (P1) грубого приближения выбираемого предсказываемого радиуса (rpred) из списка (L={r2}) возможных радиусов;
- кодирование (120) в битовый поток данных (Ipred), показывающих выбранный предсказываемый радиус (rpred) в списке (L={r2}) возможных радиусов; и
- предиктивное кодирование (130) в битовый поток невязки (rres) радиуса между первым радиусом (r1) и выбранным предсказываемым радиусом (rpred).
2. Способ по п. 1, отличающийся тем, что список возможных радиусов дополнительно содержит, по меньшей мере, один третий радиус (r3), ассоциированный с, по меньшей мере, одной третьей заполненной точкой (Рз) грубого приближения, у которой индекс (λ3) третьего датчика равен индексу (λ1) первого датчика, и индекс (s3) третьей выборки не больше индекса (s1) первой выборки.
3. Способ по п. 2, отличающийся тем, что условие приемлемости основано на сравнении между индексом (s2) второй выборки второй заполненной точки (Р2) грубого приближения и индексом (s3) третьей выборки третьей заполненной точки (Р3) грубого приближения.
4. Способ по п. 3, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда индекс (s2) второй выборки больше, чем индекс (s3) третьей выборки.
5. Способ по любому из пп. 2-4, отличающийся тем, что условие приемлемости основано на сравнении азимутальных углов, ассоциированных с датчиками, используемыми для обнаружения точек облака точек, ассоциированных с заполненными первой, второй и третьей точками грубого приближения.
6. Способ по п. 5, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда первая разность азимутальных углов меньше, чем вторая разность азимутальных углов, причем первая разность азимутальных углов является разностью между первым азимутальным углом (ϕ1), ассоциированным с первой заполненной точкой (P1) грубого приближения, и вторым азимутальным углом (ϕ2), ассоциированным со второй заполненной точкой (Р2) грубого приближения, а вторая разность азимутальных углов является разностью между первым азимутальным углом (ϕ1), ассоциированным с первой заполненной точкой (P1) грубого приближения, и третьим азимутальным углом (ϕ3), ассоциированным с третьей заполненной точкой (Р3) грубого приближения.
7. Способ по п. 1, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда расстояние больше порогового значения (th1), причем расстояние вычисляется между вторым радиусом (r2), ассоциированным со второй заполненной точкой (Р2) грубого приближения, и третьим радиусом (r3), ассоциированным с третьей заполненной точкой (Р3) грубого приближения, у которой индекс (λ3) третьего датчика равен индексу (λ1) первого датчика, и индекс (s3) третьей выборки не больше индекса (s1) первой выборки, причем пороговое значение (th1) основано на предыдущей закодированной или декодированной невязке (rres) радиуса, ассоциированной с заполненными точками грубого приближения, у которых индекс датчика равен индексу (λ1) первого датчика.
8. Способ по п. 1, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда отношение градиента радиуса к градиенту индексов выборки, оцененное из, по меньшей мере, двух предыдущих закодированных или декодированных вторых заполненных точек грубого приближения, больше, чем пороговое значение.
9. Способ декодирования из битового потока геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика, ассоциированного с индексом датчика, причем геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве, каждая заполненная точка грубого приближения располагается в двумерном пространстве с помощью индекса датчика, ассоциированного с датчиком, который обнаружил точку облака точек, ассоциированную с заполненной точкой грубого приближения, и индекса выборки, ассоциированным с моментом времени обнаружения, в котором точка облака точек была обнаружена, причем каждая заполненная точка грубого приближения ассоциирована с радиусом, основанном на расстоянии точки облака точек от опорной точки, причем способ предусматривает следующие стадии:
- получение (105) списка (L={r2}) возможных радиусов для первой заполненной точки (P1) грубого приближения, имеющей индекс (λ1) первого датчика, индекс (s1) первой выборки, и которая ассоциирована с первым радиусом (r1), этот список возможных радиусов содержит, по меньшей мере, один второй радиус (r2), ассоциированный, по меньшей мере, с одной второй заполненной точкой (Р2) грубого приближения, у которой индекс (λ2) второго датчика отличается от индекса (λ1) первого датчика и у которой индекс (s2) второй выборки меньше индекса (s1) первой выборки, причем, по меньшей мере, одна вторая заполненная точка (Р2) грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с, по меньшей мере, одной второй заполненной точкой (Р2) грубого приближения, является многообещающим для уменьшения динамического диапазона невязки предсказываемого радиуса (rres), когда первый радиус (r1) предиктивно кодируется;
- декодирование (210) из битового потока для первой заполненной точки (P1) грубого приближения данных (Ipred), показывающих выбранный предсказываемый радиус (rpred) в списке (L={r2}) возможных радиусов;
- декодирование (220) из битового потока для первой заполненной точки грубого приближения невязки (rres) радиуса; и
- получение (230) радиуса (r1), ассоциированного с точкой из облака точек, представленной первой заполненной точкой (P1) грубого приближения, на основании невязки (rres) радиуса и выбранного предсказываемого радиуса (rpred), полученного из данных (Ipred) и списка возможных радиусов (L={r2}).
10. Способ по п. 9, отличающийся тем, что список возможных радиусов дополнительно содержит, по меньшей мере, один третий радиус (r3), ассоциированный с, по меньшей мере, одной третьей заполненной точкой (Р3) грубого приближения, у которой индекс (λ3) третьего датчика равен индексу (λ1) первого датчика, и индекс (s3) третьей выборки не больше индекса (s1) первой выборки.
11. Способ по п. 10, отличающийся тем, что условие приемлемости основано на сравнении между индексом (s2) второй выборки второй заполненной точки (Р2) грубого приближения и индексом (s3) третьей выборки третьей заполненной точки (Р3) грубого приближения.
12. Способ по п. 11, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда индекс (s2) второй выборки больше, чем индекс (s3) третьей выборки.
13. Способ по любому из пп. 10-12, отличающийся тем, что условие приемлемости основано на сравнении азимутальных углов, ассоциированных с датчиками, используемыми для обнаружения точек облака точек, ассоциированных с заполненными первой, второй и третьей точками грубого приближения.
14. Способ по п. 13, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда первая разность азимутальных углов меньше, чем вторая разность азимутальных углов, причем первая разность азимутальных углов является разностью между первым азимутальным углом (ϕ1), ассоциированным с первой заполненной точкой (P1) грубого приближения, и вторым азимутальным углом (ϕ2), ассоциированным со второй заполненной точкой (Р2) грубого приближения, а вторая разность азимутальных углов является разностью между первым азимутальным углом (ϕ1), ассоциированным с первой заполненной точкой (P1) грубого приближения, и третьим азимутальным углом (ϕ3), ассоциированным с третьей заполненной точкой (Р3) грубого приближения.
15. Способ по п. 9, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда расстояние больше порогового значения (th1), причем расстояние вычисляется между вторым радиусом (r2), ассоциированным со второй заполненной точкой (Р2) грубого приближения, и третьим радиусом (r3), ассоциированным с третьей заполненной точкой (Р3) грубого приближения, у которой индекс (λ3) третьего датчика равен индексу (λ1) первого датчика, и индекс (s3) третьей выборки не больше индекса (s1) первой выборки, причем пороговое значение (th1) основано на предыдущей закодированной или декодированной невязке (rres) радиуса, ассоциированной с заполненными точками грубого приближения, у которых индекс датчика равен индексу (λ1) первого датчика.
16. Способ по п. 9, отличающийся тем, что условие приемлемости удовлетворяется второй заполненной точкой (Р2) грубого приближения, когда отношение градиента радиуса к градиенту индексов выборки, оцененное из, по меньшей мере, двух предыдущих закодированных или декодированных вторых заполненных точек грубого приближения, больше, чем пороговое значение.
17. Устройство для кодирования в битовый поток геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика, ассоциированного с индексом датчика, причем геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве, каждая заполненная точка грубого приближения располагается в двумерном пространстве с помощью индекса датчика, ассоциированного с датчиком, который обнаружил точку облака точек, ассоциированную с заполненной точкой грубого приближения, и индексом выборки, ассоциированным с моментом времени обнаружения, в котором точка облака точек была обнаружена, причем каждая заполненная точка грубого приближения ассоциирована с радиусом, основанном на расстоянии точки облака точек от опорной точки, причем устройство содержит, по меньшей мере, один процессор, выполненный с возможностью:
- получить список (L={r2}) возможных радиусов для первой заполненной точки (P1) грубого приближения, имеющей индекс (λ1) первого датчика, индекс (s1) первой выборки, и которая ассоциирована с первым радиусом (r1), этот список возможных радиусов содержит, по меньшей мере, один второй радиус (r2), ассоциированный, по меньшей мере, с одной второй заполненной точкой (Р2) грубого приближения, у которой индекс (λ2) второго датчика отличается от индекса (λ1) первого датчика и у которой индекс (s2) второй выборки не превышает индекса (s1) первой выборки, причем, по меньшей мере, одна вторая заполненная точка (Р2) грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с, по меньшей мере, одной второй заполненной точкой (Р2) грубого приближения, вероятно, снижает динамический диапазон невязки (rres) предсказываемого радиуса, когда первый радиус предиктивно кодируется;
- выбрать для первой заполненной точки (P1) грубого приближения выбираемый предсказываемый радиус (rpred) из списка (L={r2}) возможных радиусов;
- кодировать в битовый поток данные (Ipred), показывающие выбранный предсказываемый радиус (rpred) в списке (L={r2}) возможных радиусов; и
- предиктивно кодировать в битовый поток невязку (rres) радиуса между первым радиусом (r1) и выбранным предсказываемым радиусом (rpred).
18. Устройство для декодирования из битового потока геометрических данных облака точек, обнаруженных с помощью, по меньшей мере, одного датчика, ассоциированного с индексом датчика, причем геометрические данные облака точек представлены упорядоченными точками грубого приближения, заполняющими некоторые дискретные положения из набора дискретных положений в двумерном пространстве, каждая заполненная точка грубого приближения располагается в двумерном пространстве с помощью индекса датчика, ассоциированного с датчиком, который обнаружил точку облака точек, ассоциированную с заполненной точкой грубого приближения, и индекса выборки, ассоциированным с моментом времени обнаружения, в котором точка облака точек была обнаружена, причем каждая заполненная точка грубого приближения ассоциирована с радиусом, основанном на расстоянии точки облака точек от опорной точки, причем устройство содержит, по меньшей мере, один процессор, выполненный с возможностью:
- получить список (L={r2}) возможных радиусов для первой заполненной точки (P1) грубого приближения, имеющей индекс (λ1) первого датчика, индекс (s1) первой выборки, и которая ассоциирована с первым радиусом (r1), этот список возможных радиусов содержит, по меньшей мере, один второй радиус (r2), ассоциированный, по меньшей мере, с одной второй заполненной точкой (Р2) грубого приближения, у которой индекс (λ2) второго датчика отличается от индекса (λ1) первого датчика и у которой индекс (s2) второй выборки меньше индекса (s1) первой выборки, причем, по меньшей мере, одна вторая заполненная точка (Р2) грубого приближения дополнительно удовлетворяет, по меньшей мере, одному условию приемлемости, указывающему, что радиус, ассоциированный с, по меньшей мере, одной второй заполненной точкой (Р2) грубого приближения, является многообещающим для уменьшения динамического диапазона невязки предсказываемого радиуса (rres), когда первый радиус (r1) предиктивно кодируется;
- декодировать из битового потока для первой заполненной точки (P1) грубого приближения данные (Ipred), показывающие выбранный предсказываемый радиус (rpred) в списке (L={r2}) возможных радиусов;
- декодировать из битового потока для первой заполненной точки грубого приближения невязку (rres) радиуса; и
- получить радиус (r1), ассоциированный с точкой из облака точек, представленной первой заполненной точкой (P1) грубого приближения, на основании невязки (rres) радиуса и выбранного предсказываемого радиуса (rpred), полученного из данных (Ipred) и списка возможных радиусов (L={r2}).
| S | |||
| Lasserre (Xiaomi) и др., "[GPCC-EE13.53] Algorithmic explanation of the new Lidar Codec LL-LC2", 135 | |||
| MPEG meeting, 10.06.2021, доступен по URL: https://dms.mpeg.expert/doc_end_user/documents/135_OnLine/wg11/m57073-v1-m57073%5BGPCC-EE13.53%5 DAlgorithmicexplanationofthenewLidarCodecLL-LC2.docx.zip m57073 [GPCC-EE13.53] Algorithmic explanation |

