Группа изобретений относится к области электротехники и может быть использована в электроприводах запорной и регулирующей арматуры в различных отраслях народного хозяйства, в том числе нефтяной, газовой, нефтехимической, химической промышленности, системах тепло- и холодоснабжения и т.п.
Известен электропривод вращательного действия [RU 214446 U1, заявл. 13.09.2022, опубл. 28.10.2022, Бюл. № 31], содержащий блок управления, электродвигатель, ручной дублер, передачу с промежуточными телами качения. Вал ручного дублера установлен параллельно валу электродвигателя. Блок управления электроприводом размещен в едином корпусе с электродвигателем, который закреплен с неподвижным корпусом, в котором размещены элементы передачи. Для работы в опасных по взрыву условиях корпус, в котором размещены блок управления и электродвигатель, изготавливают во взрывозащищенном исполнении. Согласно чертежу, поясняющему конструктивное устройство электропривода, корпус, в котором размещены блок управления и электродвигатель, закреплен с противоположной стороны неподвижного корпуса относительно выходного вала, за счет чего повышаются габариты устройства. При изготовлении передачи не требуются сложные технологические оборудование и инструменты, что упрощает изготовление электропривода, а изготовление ряда электроприводов с различными выходными параметрами (скоростью и усилием выходного звена) можно обеспечить за счет изменения коэффициента редукции передачи, используя при этом одни и те же передачу и ручной дублер, что увеличивает унификацию ряда электроприводов вращательного действия.
Недостатками рассмотренного электропривода вращательного действия являются:
- отсутствие датчиков (например, датчиков тока электродвигателя и датчика положения вала электродвигателя), обеспечивающих работу электропривода по замкнутому контуру обратной связи, вследствие чего ухудшается качество управления электроприводом и отсутствует возможность поддерживать требуемый крутящий момент электродвигателя;
- при установке на трубопроводах сложной конфигурации, где в ограниченном пространстве размещено несколько единиц трубопроводной арматуры, закрепление корпуса, в котором размещены блок управления и электродвигатель, с противоположной стороны относительно выходного вала создает сложности при монтаже;
- конструктивные решения, направленные на изготовление ряда электроприводов с различными выходными параметрами, не учитывают необходимость увеличения мощности блока управления при увеличении мощности электродвигателя.
Общими существенными признаками заявляемой группы изобретений с рассмотренным устройством является блок управления, электродвигатель, редуктор с ручным дублером, а также использование взрывозащищенного исполнения корпуса.
Известен электропривод трубопроводной арматуры [RU 203147 U1, заявл. 22.12.2020, опубл. 23.03.2021, Бюл. № 9], содержащий корпус, электродвигатель, редуктор, блок управления и датчики положения. В качестве электродвигателя применен бесконтактный двигатель с постоянными магнитами на роторе, содержащий датчик положения ротора, а в качестве редуктора использован червячный редуктор. Датчики положения выходного вала работают в режиме концевых датчиков, реагируют на отверстия в червячном колесе и выдают в блок управления сигнал о достижении выходным валом заданного положения. Лучшим вариантом, согласно описанию, полезной модели является конструкция, когда датчики положения установлены в корпусе перпендикулярно боковой плоскости червячного колеса. При этом, согласно чертежу электропривода трубопроводной арматуры, блок управления и датчики положения выходного вала оказываются размещенными в частях корпуса, располагающихся под прямым углом друг к другу, вследствие чего кабели электрической связи, которые соединяют блок управления и датчики положения выходного вала, проложены за пределами корпуса электропривода.
Недостатками рассмотренного электропривода трубопроводной арматуры являются:
- конструктивное устройство электропривода не предусматривает средств взрывозащиты, применение которых актуально при транспорте нефти, газа и в других аналогичных применениях;
- в конструкции используются кабели электрической связи, проложенные за пределами корпуса электропривода, что создает сложности при монтаже, а также снижает надежность при эксплуатации устройства;
- не предусмотрено технических решений, обеспечивающих унификацию отдельных узлов при изготовлении ряда электроприводов с различными выходными параметрами и различной мощностью электродвигателя.
Общими существенными признаками заявляемой группы изобретений с рассмотренной полезной моделью является электродвигатель, редуктор, блок управления и датчик положения ротора электродвигателя.
Известен электромеханический силовой минипривод регулируемой запорной арматуры в модульном исполнении [Известия Тульского государственного университета. Технические науки. - 2012. - № 12-1. - С. 10-17], содержащий электродвигатель, датчик тока, датчик положения ротора электродвигателя и датчик положения выходного вала, волновой редуктор с промежуточными телами качения, ручной дублер. Минипривод имеет соосное расположение электродвигателя и ручного дублера, а также соосное расположение электродвигателя и волнового редуктора. В рассматриваемом устройстве используется бесколлекторный электродвигатель в бескорпусном исполнении. Минипривод кинематически разделяется на четыре модуля. В первый модуль входит электродвигатель с датчиками тока и положения ротора электродвигателя. Во второй модуль входит промежуточная ступень волнового редуктора. В третий модуль входит ручной дублер. В четвертый модуль входят выходная ступень волнового редуктора и датчик положения выходного вала. Каждый модуль имеет свой корпус, при этом корпуса сопрягаемых модулей, а также их выходные и входные звенья снабжены стыкующими элементами. Согласно кинематической схеме рассматриваемого устройства все модули последовательно расположены вдоль его оси вращения. Модульное исполнение минипривода позволяет унифицировать элементную базу и существенно сократить стоимость производства путем использования одних и тех же модулей в различной комплектации. Например, для увеличения развиваемого момента при той же частоте вращения можно использовать модуль с электродвигателем большей мощности и большего диаметра, или увеличить число рядов тел качения в волновых передачах второго и четвертого модулей при том же начальном диаметре.
Недостатками рассмотренного электромеханического силового минипривода регулируемой запорной арматуры в модульном исполнении являются:
- конструктивное устройство электропривода не предусматривает средств взрывозащиты, применение которых актуально при транспорте нефти, газа и в других аналогичных применениях;
- при установке на трубопроводах сложной конфигурации, где в ограниченном пространстве размещено несколько единиц трубопроводной арматуры, фиксированное расположение компонентов устройства вдоль продольной оси защитного корпуса электропривода создает сложности при монтаже;
- не рассматриваются технические решения, обеспечивающие регулирование электродвигателя по сигналам от датчика положения, а именно инвертор или его аналоги в составе блока управления, в результате не учитывается необходимость увеличения мощности блока управления при увеличении мощности электродвигателя.
Общими существенными признаками заявляемой группы изобретений с рассмотренным миниприводом является электродвигатель, датчик тока, датчик положения ротора электродвигателя и датчик положения выходного вала, редуктор, ручной дублер.
Известен прямоходный электропривод [RU 199688 U1, заявл. 30.07.2019, опубл. 14.09.2020, Бюл. № 26], содержащий кинематически соединенные электродвигатель, ручной дублер и волновой редуктор с промежуточными телами качения, и снабженный электромагнитным тормозом. При работе электропривода вращательное движение передается с вала электродвигателя через кинематическую передачу, включающую волновой редуктор с промежуточными телами качения, на выходной вал, а также на вал электромагнитного тормоза. Электропитание катушки электромагнита тормоза осуществляется одновременно с электропитанием электродвигателя. При подаче электропитания на электродвигатель происходит растормаживание электромагнитного тормоза. Для обеспечения взрывозащиты электромагнитный тормоз и блок электронного управления электроприводом может быть помещен во взрывозащищенный корпус. Согласно чертежу прямоходного электропривода, электродвигатель имеет корпусное вертикальное исполнение валом вниз с одним фланцем на подшипниковом щите; ось вращения электродвигателя параллельна оси вращения выходного вала и оси вращения. Корпус двигателя и взрывозащищенный корпус, в котором расположены электромагнитный тормоз и блок электронного управления электроприводом, размещены с противоположных сторон относительно оси вращения выходного вала.
Недостатками рассмотренного прямоходного электропривода являются:
- отсутствие датчиков, обеспечивающих работу электропривода по замкнутому контуру обратной связи, например, датчиков тока электродвигателя и датчика положения вала электродвигателя, вследствие чего ухудшается качество управления электроприводом;
- высокие габариты вследствие корпусного исполнения электродвигателя, что при установке на трубопроводах сложной конфигурации, где в ограниченном пространстве размещено несколько единиц трубопроводной арматуры, создает сложности при монтаже;
- не предусмотрено технических решений, обеспечивающих унификацию отдельных узлов при изготовлении ряда электроприводов с различными выходными параметрами и различной мощностью электродвигателя.
Общими существенными признаками заявляемой группы изобретений с рассмотренной полезной моделью является электродвигатель, ручной дублер, редуктор и электромагнитный тормоз.
Известно устройство управления запорно-регулирующим органом трубопроводной арматуры [RU 130658 U1, заявл. 27.12.2012, опубл. 27.07.2013, Бюл. № 21], содержащее электродвигатель с вводным устройством, ручной дублер, редуктор, блок датчиков, а также органы индикации и органы местного управления на лицевой панели. Используется взрывонепроницаемая оболочка электродвигателя, обеспечивающая щелевую взрывозащиту и состоящая из цилиндрического кожуха электродвигателя и кожуха вводного устройства с кабельными вводами, а также клеммный отсек с кабельными вводами на торце корпуса. Согласно чертежу общего вида конструктивного выполнения устройства управления запорно-регулирующим органом трубопроводной арматуры, электродвигатель имеет горизонтальное исполнение с одним концом вала, который кинематически сопряжен с редуктором; ось вращения электродвигателя коллинеарна горизонтальной оси всего устройства. Электродвигатель размещен с противоположной стороны от лицевой панели и клеммного отсека относительно геометрического центра устройства. В результате блок датчиков и электродвигатель соединены электрическим кабелем соответственно через клеммный отсек с кабельными вводами на торце корпуса и вводное устройство с кабельными вводами на электродвигателе, причем данный электрический кабель размещен за пределами корпуса устройства.
Недостатками рассмотренного устройства управления запорно-регулирующим органом трубопроводной арматуры являются:
- отсутствие датчика положения вала электродвигателя, обеспечивающего работу электропривода по замкнутому контуру обратной связи, вследствие чего ухудшается качество управления электроприводом;
- в конструкции используются кабели электрической связи, проложенные за пределами корпуса устройства, что создает сложности при монтаже, а также снижает надежность при эксплуатации;
- не предусмотрено технических решений, обеспечивающих унификацию отдельных узлов при изготовлении ряда электроприводов с различными выходными параметрами и различной мощностью электродвигателя.
Общими существенными признаками заявляемой группы изобретений с рассмотренным устройством является, электродвигатель, редуктор и ручной дублер, а также использование щелевой взрывозащиты.
Известен малогабаритный электропривод для трубопроводной арматуры [RU 205093 U1, заявл. 10.03.2021, опубл. 28.06.2021, Бюл. № 19], содержащий корпус, в котором расположены электродвигатель, редуктор и ручной дублер, а также датчик положения и колодка электрических соединений. В качестве редуктора использован волновой редуктор с промежуточными телами качения. При исчезновении внешнего питания обеспечивается фиксация запорного органа от перемещений за счет электромеханического тормоза на электродвигателе. Корпус имеет взрывозащищенное исполнение и может быть выполнен двухполостным, где в первой полости размещены электродвигатель, редуктор, ручной дублер, электромеханический тормоз и датчик положения, а во второй полости размещена колодка электрических соединений. Выполнение взрывозащищенного корпуса двухполостным обеспечивает дополнительную изоляцию объема электропривода с механизмами и электроаппаратурой от внешней среды при подключениях внешних кабелей за счет исключения попадания в нее влаги, пыли, посторонних частиц. При этом через колодку соединений при открытой герметичной крышке изолированного объема второй полости взрывозащищенного корпуса осуществляется подключение силовых и информационных кабелей к электроприводу, в том числе соединение с электрической сетью и внешним пультом управления, но исключается попадание влаги, пыли и посторонних частиц в первую полость взрывозащищенного корпуса, что способствует уменьшению числа отказов и обеспечивает более надежную работу электропривода.
Недостатками рассмотренного малогабаритного электропривода для трубопроводной арматуры являются:
- местное управление трубопроводной арматурой организовано с использованием внешнего пульта управления, соединенного с электроприводом при помощи информационного кабеля, что снижает надежность при эксплуатации устройства;
- не предусмотрено технических решений, обеспечивающих унификацию отдельных узлов при изготовлении ряда электроприводов с различными выходными параметрами и различной мощностью электродвигателя.
Общими существенными признаками заявляемой группы изобретений с рассмотренной полезной моделью является взрывозащищенный корпус, электродвигатель, редуктор и ручной дублер, датчик положения, а также тормоз и колодка электрических соединений.
Известно устройство управления запирающим элементом трубопроводной арматуры, принятое за прототип, [RU 185880 U1, заявл. 15.12.2017, опубл. 21.12.2018, Бюл. № 36], содержащее корпус, редуктор с ручным дублером, электродвигатель, датчики положения и крутящего момента, блок управления, блок индикации и органы настройки, размещенные на лицевой панели, отсек вводного устройства с взрывозащищенной колодкой электрических соединений и кабельными вводами, при этом корпус блока управления установлен на корпусе редуктора и образуют единую взрывонепроницаемую оболочку, а объем отсека вводного устройства ограничен взрывозащищенной колодкой электрических соединений, который выполнен с объемом менее 2000 см3, что позволяет использовать любые кабельные вводы соответствующей подгруппы и вида взрывозащиты, нет необходимости использовать специальные исполнения кабельных вводов включающих заполненные компаундом уплотнения или вводов с резиновыми уплотнения вокруг отдельных жил или других эквивалентных уплотнительных устройств.
Недостатками прототипа являются:
- размещение блока управления в отдельном взрывонепроницаемом корпусе увеличивает габариты устройства, а фиксированное расположение лицевой панели создает сложности при монтаже в случае установки на трубопроводах сложной конфигурации, где в ограниченном пространстве размещено несколько единиц трубопроводной арматуры;
- не предусмотрено технических решений, обеспечивающих унификацию отдельных узлов при изготовлении ряда устройств управления запирающим элементом трубопроводной с различными выходными параметрами и различной мощностью электродвигателя.
Общими существенными признаками заявляемой группы изобретений с прототипом является взрывозащищенный корпус, редуктор с ручным дублером, электродвигатель, датчики положения, блок управления, средства индикации и настройки, размещенные на лицевой панели, а также колодка электрических соединений.
Задача, решаемая заявляемой группой изобретений, заключается в устранении недостатков аналогов путем унификации отдельных элементов конструкции малогабаритного регулируемого электропривода трубопроводной арматуры. Технический результат заключается в упрощении изготовления и упрощении монтажа электропривода трубопроводной арматуры, в том числе на трубопроводах сложной конфигурации и в условиях ограниченного пространства.
Для решения поставленной задачи первым аспектом изобретения является корпус электропривода трубопроводной арматуры, состоящий из одного центрального и от трех до шести функциональных сегментов соединенных при помощи фланцевого соединения, причем центральный сегмент имеет сложную обладающую центральной симметрией форму со внутренней полостью и шестью наружными гранями, где каждая из граней представляет собой фланец с проходным отверстием; каждый из функциональных сегментов имеет по меньшей мере один ответный фланец, соответствующий по форме и размеру фланцам центрального сегмента; а в случае, когда функциональных сегментов менее шести, проходные отверстия свободных граней закрыты заглушками.
Центральный сегмент, функциональные сегменты и заглушка предпочтительно имеют исполнение типа взрывонепроницаемая оболочка, а соединение центрального сегмента с функциональными сегментами либо заглушкой выполнено с обеспечением щелевой взрывозащиты.
В соответствии со вторым аспектом изобретения поставленная задача решается тем, что электропривод трубопроводной арматуры включает в себя описанный выше корпус, электродвигатель, редуктор с ручным дублером, через выходной вал приводящий в движение клапан трубопроводной арматуры, колодку электрических соединений, средства индикации и настройки, а также блок управления с возможностью подключения датчиков для управления по замкнутому контуру обратной связи, и интерфейсы связи для обмена информацией с системой телемеханики, причем в блок управления включены разделенные на равное число модулей выпрямитель и инвертор, а количество модулей может быть от одного до четырех; электродвигатель, редуктор с ручным дублером, электромагнитный тормоз, датчик положения ротора электродвигателя и датчик положения выходного вала размещены в функциональном сегменте электромеханическом, который с одной стороны присоединяется к клапану трубопроводной арматуры, а с другой стороны соединен с одной из граней центрального сегмента; колодка электрических соединений размещена в функциональном сегменте вводном, который соединен с одной из граней центрального сегмента, перпендикулярной грани с которой соединен функциональный сегмент электромеханический; средства индикации и настройки размещены на функциональном сегменте лицевом, который соединен с одной из граней центрального сегмента таким образом, чтобы средства индикации и настройки не перекрывались элементами конструкции электропривода или трубопровода, на котором размещается клапан трубопроводной арматуры; первые модули выпрямителя и инвертора размещены в центральном сегменте, а вторые, третьи и четвертые модули выпрямителя и инвертора, при их наличии, размещены в соответствующем функциональном сегменте силовом, каждый из которых соединен с одной из граней центрального сегмента; остальные элементы электропривода трубопроводной арматуры размещены в центральном сегменте.
Электродвигатель может иметь встраиваемую бескорпусную конструкцию.
На одном валу с электродвигателем дополнительно может быть размещен электромагнитный тормоз.
Для обеспечения возможности управления по замкнутому контуру обратной связи используется датчик положения ротора электродвигателя и датчики тока электродвигателя. Дополнительно для обеспечения возможности управления по замкнутому контуру может использоваться датчик положения выходного вала, кинематически соединенный с выходом редуктора.
Электродвигатель редуктор с ручным дублером, электромагнитный тормоз, датчик положения ротора электродвигателя и датчик положения выходного вала соединены кинематически и расположены в функциональном сегменте электромеханическом таким образом, чтобы монтаж питающих кабелей и кабелей связи осуществлялся со стороны центрального сегмента.
Функциональный сегмент электромеханический состоит из оболочки для редуктора с ручным дублером и цилиндрической оболочки для размещения и крепления электрического оборудования, имеющей две грани, на одной из которых размещен фланец для соединения с центральным сегментом, а другая грань имеет конструктивные элементы для соединения с оболочкой редуктора с ручным дублером. При этом соединение оболочки для редуктора с ручным дублером и цилиндрической оболочки для размещения и крепления электрического оборудования предпочтительно выполнено с обеспечением щелевой взрывозащиты.
Функциональный сегмент вводной состоит из оболочки для размещения и крепления колодки электрических соединений, имеющей по меньшей мере одну грань, на которой размещен глухой фланец для соединения с центральным сегментом, предпочтительно обеспечивающий герметизацию сегмента вводного от остального корпуса электропривода трубопроводной арматуры, и крышки, предпочтительно соединяемой с оболочкой с обеспечением щелевой взрывозащиты, имеющей по меньшей мере одну внешнюю грань для размещения информационной таблички. На внешней поверхности оболочки предусмотрены отверстия под герметичные кабельные вводы, а на глухом фланце оболочки размещены проходные изоляторы.
Функциональный сегмент лицевой состоит из оболочки, имеющей по меньшей мере две грани, на одной из которых размещен фланец для соединения с центральным сегментом, а другая грань служит для размещения и крепления средств индикации и настройки и может содержать смотровое окно.
Функциональный сегмент силовой состоит из оболочки для размещения и крепления модулей выпрямителя и инвертора, имеющей по меньшей мере две грани, на одной из которых которой размещен фланец для соединения с центральным сегментом, а другая грань является внешней и предназначена для размещения информационной таблички.
Группа изобретений поясняется следующими рисунками.
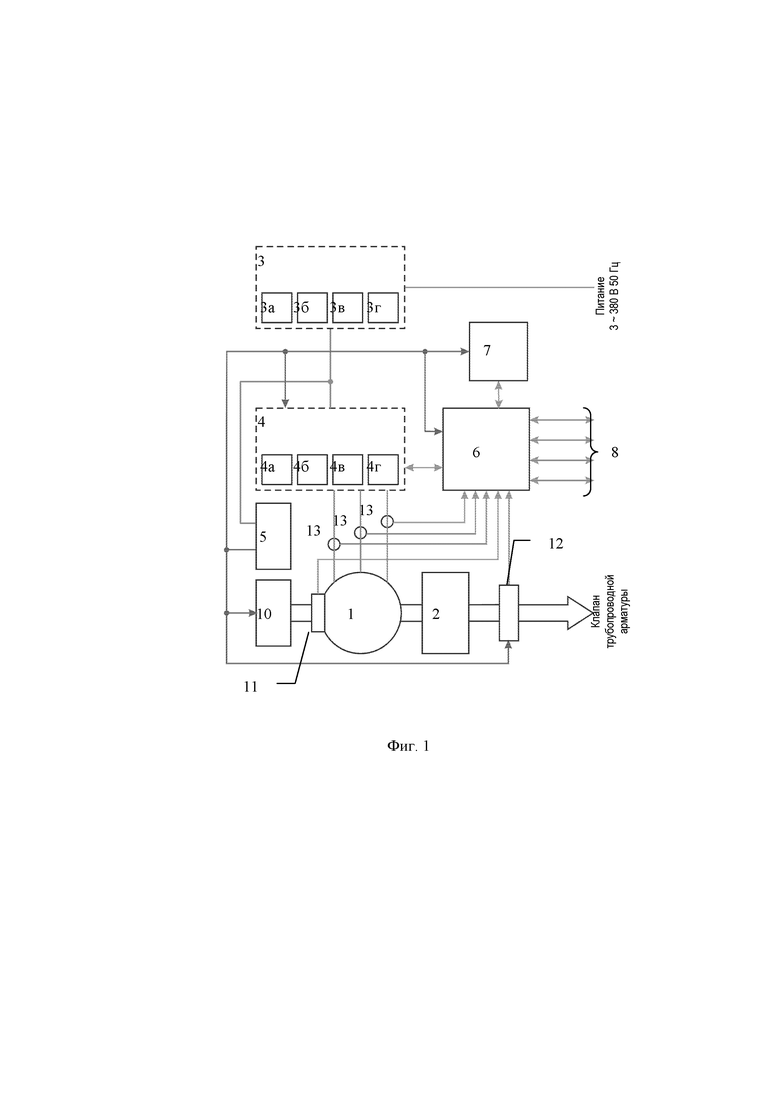
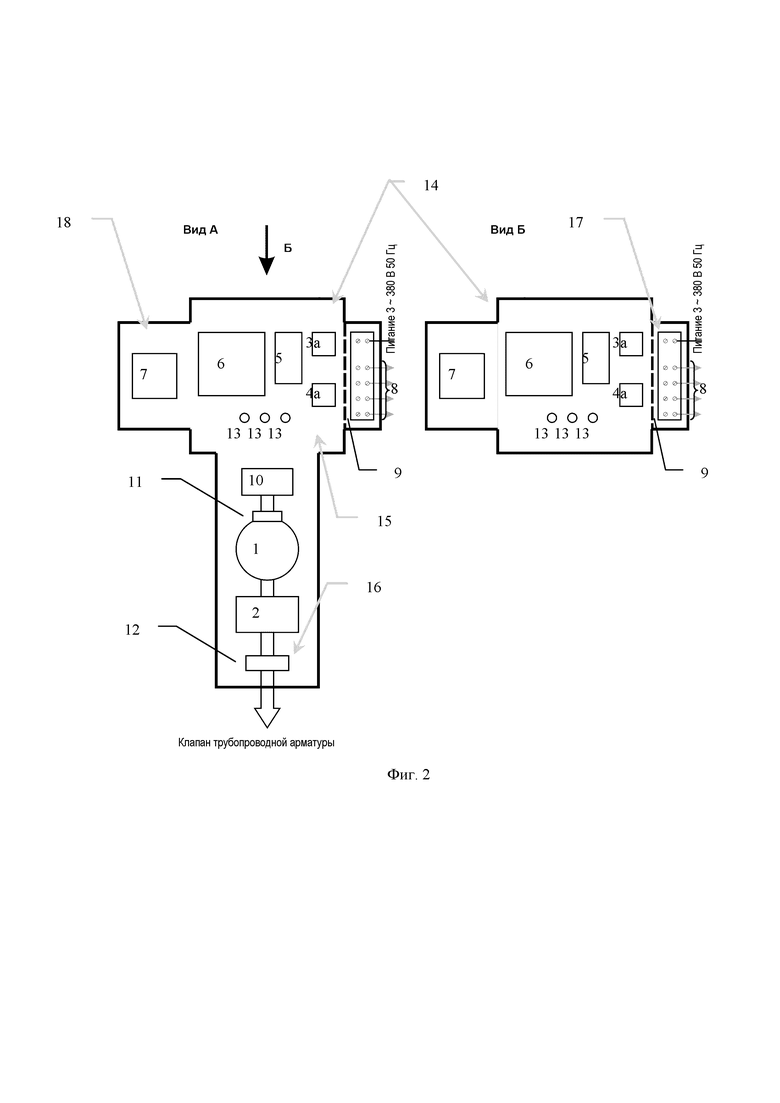
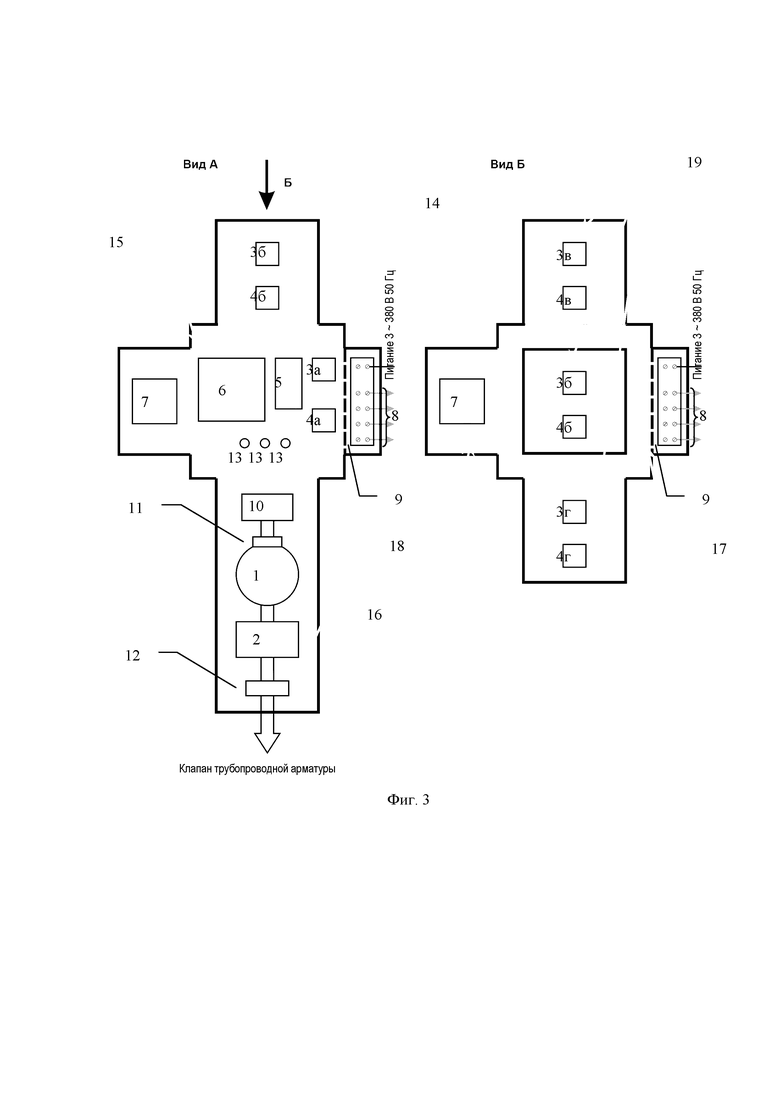
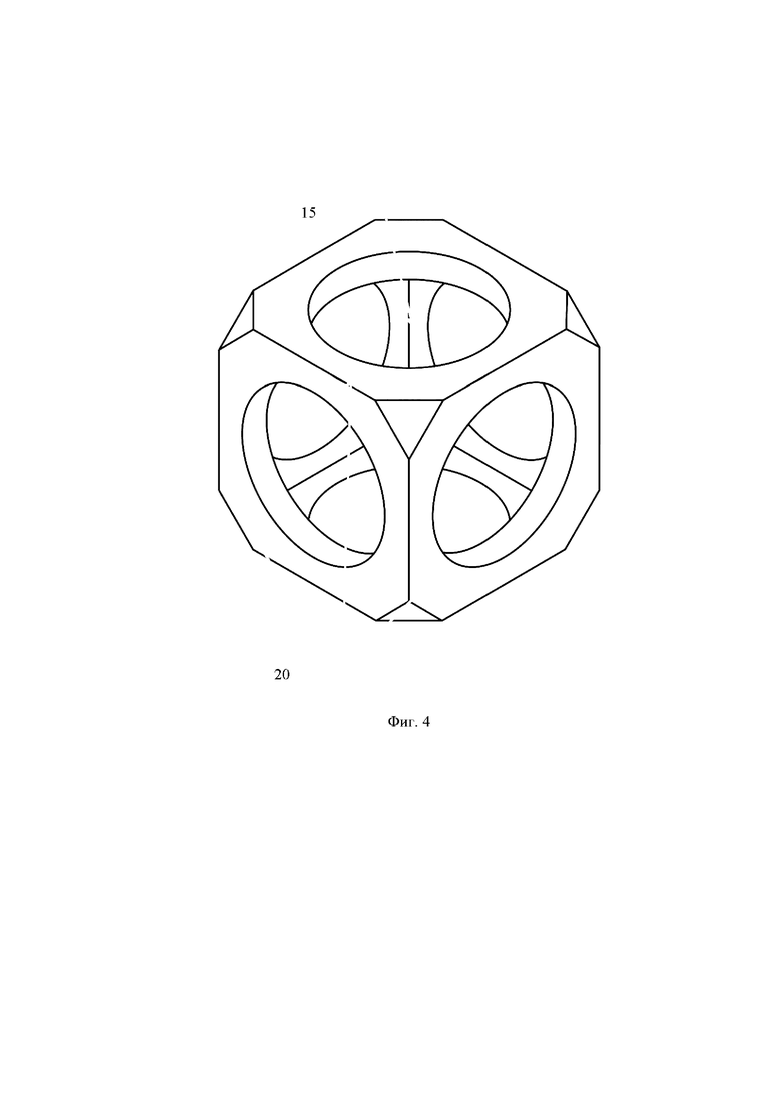
На фиг. 1 показана блок-схема, поясняющая принцип работы. На фиг. 2 и фиг. 3 показаны варианты электропривода трубопроводной арматуры в случае одного и в случае четырех модулей выпрямителя и инвертора. На фиг. 4 изображен вариант формы центрального сегмента.
Перечень позиций на рисунках:
1 - электродвигатель,
2 - редуктор с ручным дублером,
3 - выпрямитель,
3а, 3б, 3в, 3г - модули выпрямителя,
4 - инвертор,
4а, 4б, 4в, 4г - модули инвертора,
5 - блок питания,
6 - модуль управления,
7 - средства индикации и настройки,
8 - интерфейсы связи для обмена информацией с системой телемеханики,
9 - колодка электрических соединений,
10 - электромагнитный тормоз,
11 - датчик положения ротора электродвигателя,
12 - датчик положения выходного вала,
13 - датчики тока электродвигателя,
14 - корпус,
15 - центральный сегмент,
16 - функциональный сегмент электромеханический,
17 - функциональный сегмент вводной,
18 - функциональный сегмент лицевой,
19 - функциональный сегмент силовой,
20 - грани центрального сегмента.
Электропривод трубопроводной арматуры включает электродвигатель 1; редуктор с ручным дублером 2, соединяемый через выходной вал с клапаном трубопроводной арматуры; блок управления, состоящий из выпрямителя 3, инвертора 4, блока питания 5 и модуля управления 6; средства индикации и настройки 7, интерфейсы связи 8 для обмена информацией с системой телемеханики (не показана). Выпрямитель 3 подключается через колодку электрических соединений 9 к внешнему источнику питания. Интерфейсы связи 8 для обмена информацией с системой телемеханики также подключаются через колодку электрических соединений 9. Дополнительно в электропривод трубопроводной арматуры могут быть включены электромагнитный тормоз 10, датчик положения ротора электродвигателя 11, датчик положения выходного вала 12, датчики тока электродвигателя 13. Выпрямитель 3 и инвертор 4 разделены модули, количество которых может быть от одного до четырех. Количество модулей выпрямителя 3а, 3б, 3в, 3г равно количеству модулей инвертора 4а, 4б, 4в, 4г.
Электродвигатель 1, редуктор с ручным дублером 2, датчик положения ротора электродвигателя 11, а также дополнительно включаемые в электропривод трубопроводной арматуры электромагнитный тормоз 10 и датчик положения выходного вала 12 соединены кинематически. В качестве электродвигателя 1 может использоваться синхронный двигатель с постоянными магнитами. С целью минимизации габаритов электродвигатель 1 может иметь встраиваемую бескорпусную конструкцию. В качестве редуктора с ручным дублером 2 может быть волновой редуктор с промежуточными телами качения. Возможно соединение с трубопроводной арматурой различных типов: прямоходной, неполноповоротной, многооборотной.
Для обеспечения возможности управления по замкнутому контуру обратной связи модуль управления 6 соединен с датчиком положения ротора электродвигателя 11 и датчиками тока электродвигателя 13. В качестве датчика положения ротора электродвигателя 11 может быть использован энергонезависимый энкодер либо датчик магнитного поля, устанавливаемый на торцевой части статора электродвигателя 1. Также для повышения качества управления перемещением клапана трубопроводной арматуры модуль управления 6 может быть соединен с дополнительно включаемым в электропривод трубопроводной арматуры датчиком положения выходного вала 12. В качестве датчика положения выходного вала 12 может быть энергонезависимый энкодер, который в том числе может быть абсолютным и многооборотным.
Корпус электропривода трубопроводной арматуры 14, также входящий в состав электропривода трубопроводной арматуры, состоит из соединенных при помощи фланцевого соединения от трех до шести функциональных сегментов и одного центрального сегмента 15, отдельно показанного на фиг. 4, имеющего сложную обладающую центральной симметрией форму с внутренней полостью для размещения и крепления оборудования и шестью наружными гранями 20, где каждая из граней представляет собой фланец с проходным отверстием, предназначенный для присоединения функциональных сегментов или закрываемый заглушкой. Каждый из функциональных сегментов, имеет по меньшей мере один ответный фланец, соответствующий по форме и размеру фланцам центрального сегмента 15. Все сегменты корпуса 14, а также заглушка могут иметь исполнение типа взрывонепроницаемая оболочка, при этом соединение центрального сегмента 15 с функциональными сегментами либо заглушкой выполнено с обеспечением щелевой взрывозащиты.
Электродвигатель 1, редуктор с ручным дублером 2, электромагнитный тормоз 10, датчик положения ротора электродвигателя 11 и датчик положения выходного вала 12 размещены в функциональном сегменте электромеханическом 16; колодка электрических соединений 9 размещена в функциональном сегменте вводном 17; средства индикации и настройки 7 размещены на функциональном сегменте лицевом 18; блок питания 5, модуль управления 6 и датчики тока электродвигателя 13 размещены в центральном сегменте 15; первый модуль выпрямителя 3а и первый модуль инвертора 4а размещены в центральном сегменте, а вторые, третьи и четвертые модули выпрямителя 36, 3в, 3г и вторые, третьи и четвертые модули инвертора 46, 4в, 4г, при их наличии (фиг. 2, фиг. 3), размещены в соответствующем функциональном сегменте силовом 19.
Электродвигатель 1, редуктор с ручным дублером 2, электромагнитный тормоз 10, датчик положения ротора электродвигателя 11 и датчик положения выходного вала 12 соединены кинематически и расположены в функциональном сегменте электромеханическом 16 таким образом, чтобы монтаж питающих кабелей и кабелей связи осуществлялся со стороны центрального сегмента 15.
Функциональный сегмент электромеханический 16 состоит из оболочки для редуктора с ручным дублером 2 и цилиндрической оболочки для размещения и крепления электрического оборудования, имеющей две грани, на одной из которых размещен фланец для соединения с центральным сегментом 15, а другая грань имеет конструктивные элементы для соединения с оболочкой для редуктора с ручным дублером 2, при этом соединение преимущественно выполнено с обеспечением щелевой взрывозащиты. Функциональный сегмент электромеханический 16 со стороны оболочки для редуктора с ручным дублером 2 присоединяется к клапану трубопроводной арматуры, а со стороны цилиндрической оболочки присоединен к одной из граней 20 центрального сегмента 15.
Ввод в корпус 14 питающих кабелей, соединяющих внешний источник питания, имеющий, например, параметры 3 ~ 380 В 50 Гц, со входом выпрямителя 3, а также кабелей связи, соединяющих интерфейсы связи 8, в качестве которых могут быть аналоговые, дискретные и цифровые интерфейсы связи, в том числе USB, RS485 и CAN, с системой телемеханики осуществляется через функциональный сегмент вводной 17 (фиг. 2, фиг. 3), в котором размещена колодка электрических соединений 9.
Функциональный сегмент вводной 17 состоит из оболочки для размещения и крепления колодки электрических соединений 9, имеющей по меньшей мере одну грань, на которой размещен глухой фланец для соединения с центральным сегментом 15, предпочтительно обеспечивающий герметизацию функционального сегмента вводного 17 от остального объема корпуса 14, и крышки, предпочтительно соединяемой с оболочкой с обеспечением щелевой взрывозащиты, имеющей по меньшей мере одну внешнюю грань для размещения информационной таблички. На внешней поверхности оболочки функционального сегмента вводного 17 предусмотрены отверстия для размещения герметичных кабельных вводов, обеспечивающие при необходимости взрывобезопасность ввода в корпус 14 питающих кабелей и кабелей связи, а на глухом фланце оболочки размещены проходные изоляторы (не показаны), обеспечивающие электрическое соединение соответствующих контактов колодки электрических соединений 9 со входом выпрямителя 3 и интерфейсами связи 8 для обмена информацией с системой телемеханики. Функциональный сегмент вводной 17 присоединен к одной из граней 20 центрального сегмента 15, перпендикулярной грани 20, к которой присоединен функциональный сегмент электромеханический 16. Присоединение функционального сегмента электромеханического 16 и функционального сегмента вводного 17 к перпендикулярным граням 20 позволяет оптимизировать размещение в центральном сегменте 15 первого модуля выпрямителя 3а и первого модуля инвертора 4а, тем самым обеспечивая минимизацию размеров блока управления.
Средства индикации и настройки 7 размещены на функциональном сегменте лицевом 18 (фиг. 2, фиг. 3), который состоит из оболочки, имеющей по меньшей мере две грани, на одной из которых размещен фланец для соединения с центральным сегментом 15, а другая грань служит для размещения и крепления средств индикации и настройки 7 и может содержать смотровое окно.
Функциональный сегмент лицевой 18, присоединен к одной из граней 20 центрального сегмента 15. Особенности конструкции трубопровода, на котором размещается трубопроводная арматура, клапан которой присоединяется к электроприводу трубопроводной арматуры, как правило, известны заранее, поэтому грань 20 центрального сегмента 15 для присоединения функционального сегмента лицевого 18 выбрана так, чтобы средства индикации и настройки 7 не перекрывались элементами конструкции самого электропривода или трубопровода, даже в случае установки на трубопроводах сложной конфигурации, где в ограниченном пространстве размещено несколько единиц трубопроводной арматуры.
Вторые, третьи и четвертые модули выпрямителя 3б, 3в, 3г и вторые, третьи и четвертые модули инвертора 4б, 4в, 4г по своим параметрам идентичны первому модулю выпрямителя 3а и первому модулю инвертора 4а, а общее количество модулей выпрямителя 3 и инвертора 4 выбрано исходя из требуемой мощности блока управления, тем самым обеспечивая унификацию отдельных узлов при изготовлении ряда устройств управления запирающим элементом трубопроводной с различными выходными параметрами и различной мощностью электродвигателя. На фиг. 2 показан вариант электропривода трубопроводной арматуры, где в корпусе 14 размещены только первый модуль выпрямителя 3а и первый модуль инвертора 4а. На фиг. 3 показан вариант электропривода трубопроводной арматуры с максимальным количеством модулей выпрямителя 3 и инвертора 4, при этом вторые, третьи и четвертые модули выпрямителя 3б, 3в, 3г и вторые, третьи и четвертые модули инвертора 46, 4в, 4 г размещены попарно в отдельных функциональных сегментах силовых 19.
Каждый используемый функциональный сегмент силовой 19 состоит из оболочки для размещения и крепления модулей выпрямителя 3 и инвертора 4 и имеет по меньшей мере две грани, на одной из которых которой размещен фланец для соединения с центральным сегментом 15, а другая грань является внешней и предназначена для размещения информационной таблички.
Функциональный сегмент силовой 19 присоединяется к одной из граней 20 центрального сегмента 15. В зависимости от требуемой мощности блока управления может использоваться от одного до четырех модулей выпрямителя 3 и инвертора 4 и соответственно к центральному сегменту 15 присоединено до трех функциональных сегментов силовых 19. В случае, когда использовано менее трех функциональных сегментов силовых 19 (например, фиг. 2), незадействованные грани 20 центрального сегмента 15 запираются заглушкой (не показана).
Питающие кабели и кабели связи внутри корпуса 14 электропривода трубопроводной арматуры смонтированы в соответствии с фиг. 1 в условиях завода изготовителя. Модули выпрямителя 3а, 3б, 3в, 3г включены параллельно, модули инвертора 4а, 4б, 4в, 4г так же включены параллельно. Вход инвертора 4 и вход блока питания 6 подключены к выходу выпрямителя 3. Выход инвертора 4 подключен к электродвигателю 1. Инвертор 4, средства индикации и настройки 7, интерфейсы связи 8 для обмена информацией с системой телемеханики, датчик положения ротора электродвигателя 11, датчик положения выходного вала 12, а также датчики тока электродвигателя 13 соединены с модулем управления 6.
Заявляемая группа изобретений работает следующим образом.
Сначала исходя из требуемой мощности блока управления выбирают число используемых модулей выпрямителя 3 и инвертора 4, а затем с учетом особенностей конструкции трубопровода, на котором будет размещен клапан трубопроводной арматуры, присоединяемый к электроприводу трубопроводной арматуры, в условиях завода изготовителя последовательно осуществляют следующие операции: кинематическое соединение и сборку редуктора с ручным дублером 2, электродвигателя 1, датчика положения ротора электродвигателя 11 и при необходимости датчика положения выходного вала 12, и электромагнитного тормоза 10, а также их размещение и закрепление в функциональном сегменте электромеханическом 16; установку проходных изоляторов на глухом фланце оболочки для размещения и крепления колодки электрических соединений 9 функционального сегмента вводного 17, сборку и крепление колодки электрических соединений 9 в функциональном сегменте вводном 17; сборку средств индикации и настройки 7 в функциональном сегменте лицевом 18; при необходимости сборку требуемого количества модулей выпрямителя 3б, 3в, 3г и модулей инвертора 4б, 4в, 4г попарно в функциональных сегментах силовых 19; сборку модуля выпрямителя За, модуля инвертора 4а, блока питания 5, модуля управления 6, интерфейсов связи 8 для обмена информацией с системой телемеханики и датчиков тока электродвигателя 13 в центральном сегменте 15; выбор граней 20 центрального сегмента 15 для присоединения функциональных сегментов; подготовку при необходимости требуемого количества заглушек; монтаж питающих кабелей и кабелей связи; окончательную сборку корпуса 14 и размещение в нем оборудования электропривода трубопроводной арматуры. Тем самым обеспечивается упрощение изготовления малогабаритного регулируемого электропривода трубопроводной арматуры с унификацией отдельных элементов конструкции и упрощается его последующий монтаж, в том числе на трубопроводах сложной конфигурации и в условиях ограниченного пространства.
Затем электропривод трубопроводной арматуры устанавливают на место эксплуатации; открывают крышку функционального сегмента вводного 17; в отверстия для размещения герметичных кабельных вводов устанавливают герметичные кабельные вводы, через которые в оболочку функционального сегмента вводного 17 вводят питающие кабели и кабели связи; подключают питающие кабели и кабели связи к соответствующим контактам колодки электрических соединений 9, чтобы обеспечить подключение выпрямителя 3 к внешнему источнику питания и подключение интерфейсов связи 8 к системе телемеханики; закрывают крышку функционального сегмента вводного 17. Электропривод трубопроводной арматуры готов к эксплуатации.
При подаче на вход выпрямителя 3 внешнего питания, на выходе выпрямителя 3 формируется постоянное напряжение, поступающее на вход блока питания 5 и вход инвертора 4. Блок питания 5 формирует необходимое напряжение для функционирования инвертора 4, модуля управления 6, средств индикации и настройки 7 и при необходимости электромагнитного тормоза 10. Инвертор 4 подает напряжение на электродвигатель 1.
При поступлении команд управления «Открыть» или «Закрыть», полученных от оператора с помощью средств индикации и настройки 7 или от системы телемеханики через интерфейсы связи 8 (в зависимости от установленного режима управления), происходит растормаживание электромагнитного тормоза 10 и формирование напряжения, подаваемого на электродвигатель 1 инвертором 4. Частота и амплитуда напряжения, подаваемого на электродвигатель 1, определяется модулем управления 6 исходя из настроечных параметров (скорость, положение, моменты трогания и движения и т.п.) и сигналов обратной связи отдатчиков тока электродвигателя 13, датчика положения ротора электродвигателя 11 и, при наличии, от датчика положения выходного вала 13 в соответствии с алгоритмом управления, в качестве которого используется векторное управление. При этом, если в качестве электродвигателя 1 использован синхронный двигатель с постоянными магнитами, а в качестве датчика положения ротора электродвигателя 11 использован датчик магнитного поля электродвигателя, в блок управления 6 передается информация о положении магнитного поля в зазоре электродвигателя 1, а поскольку в рассматриваемом случае положение магнитного поля в зазоре и положении ротора электродвигателя 1 однозначно взаимосвязаны, блок управления 6 преобразует информацию о положении магнитного поля в зазоре электродвигателя 1 в информацию о положении ротора электродвигателя 1. Электродвигатель 1 начинает вращаться. Редуктор с ручным дублером 2 преобразует вращение электродвигателя 1 в движение клапана трубопроводной арматуры, которое происходит вплоть до достижения заданного конечного положения или требуемого промежуточного положения, после чего производится останов электродвигателя 1, а затем накладывается электромагнитный тормоз 10. В процессе работы электродвигателя 1 блоком управления 6 исходя из сигналов обратной связи от датчика положения ротора электродвигателя 11, датчика положения выходного вала 12 и датчиков тока электродвигателя 13 обеспечивается вычисления крутящего момента, постоянный контроль этой величины и отключение электродвигателя 1 при превышении ею заданного значения. Информация о достижении заданного конечного положения или требуемого промежуточного положения, а также об отключении в случае превышения крутящего момента, отображается с помощью средств индикации и настройки 7 или передается в систему телемеханики через интерфейсы связи 8.
Заявляемые корпус электропривода трубопроводной арматуры и электропривод трубопроводной арматуры могут быть неоднократно воспроизведены на современном оборудовании и планируются к применению для управления трубопроводной арматурой, что позволяет сделать вывод о соответствии группы изобретений критерию «промышленная применимость».
Таким образом, заявляемая группа изобретений обеспечивает создание малогабаритного регулируемого электропривода трубопроводной арматуры с унификацией отдельных элементов конструкции, упрощающих изготовление ряда устройств с различными выходными параметрами и различной мощностью электродвигателя, а также упрощение монтажа электропривода трубопроводной арматуры, в том числе на трубопроводах сложной конфигурации и в условиях ограниченного пространства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2024 |
|
RU2829243C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 1980 |
|
SU974008A1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2366848C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2364780C1 |
| Устройство трубопроводной арматуры и способ его настройки | 2024 |
|
RU2834516C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2154219C1 |
| Устройство управления запорно-регулирующим органом трубопроводной арматуры | 2022 |
|
RU2792715C1 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2002 |
|
RU2239116C2 |
Изобретение предназначено для использования в нефтяной, газовой промышленностях и решает задачу создания малогабаритного регулируемого электропривода трубопроводной арматуры с унификацией отдельных элементов конструкции, упрощающих изготовление, монтаж. Электропривод содержит электродвигатель, редуктор с ручным дублером, блок управления с выпрямителем и инвертором, разделенными на модули количеством от одного до четырех, а также корпус, состоящий из сегментов, соединенных при помощи фланцевого соединения, при этом центральный сегмент имеет шесть наружных граней с проходным отверстием, предназначенных для присоединения функциональных сегментов или закрываемых заглушками. Электрическое оборудование размещено внутри корпуса так, чтобы монтаж питающих кабелей и кабелей связи осуществлялся со стороны центрального сегмента. Сегменты корпуса имеют исполнение «взрывонепроницаемая оболочка», а при их соединении обеспечивается щелевая взрывозащита. 2 н. и 13 з.п. ф-лы, 4 ил.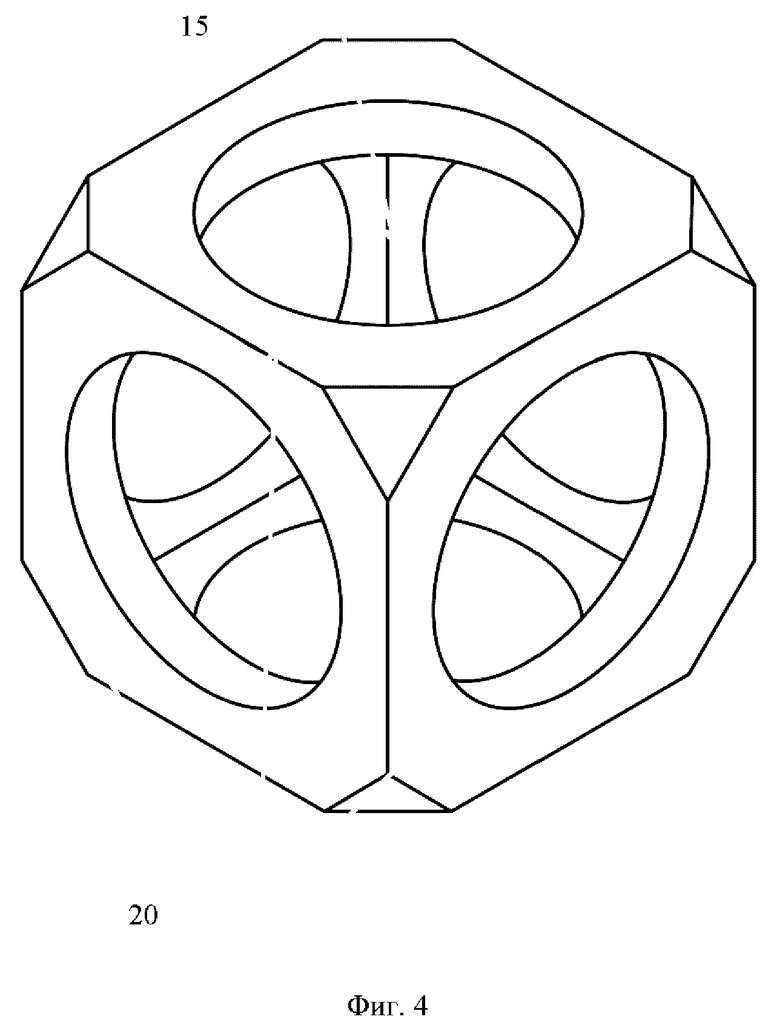
1. Корпус электропривода трубопроводной арматуры, состоящий из одного центрального и от трех до шести функциональных сегментов, соединенных при помощи фланцевого соединения, причем центральный сегмент имеет сложную, обладающую центральной симметрией форму с внутренней полостью и шестью наружными гранями, где каждая из граней представляет собой фланец с проходным отверстием; каждый из функциональных сегментов имеет по меньшей мере один ответный фланец, соответствующий по форме и размеру фланцам центрального сегмента; а в случае, когда функциональных сегментов менее шести, проходные отверстия свободных граней закрыты заглушками.
2. Корпус по п. 1, отличающийся тем, что центральный сегмент, функциональные сегменты и заглушка имеют исполнение типа взрывонепроницаемая оболочка, а соединение центрального сегмента с функциональными сегментами либо заглушкой выполнено с обеспечением щелевой взрывозащиты.
3. Электропривод трубопроводной арматуры, включающий в себя корпус по любому из пп. 1, 2, электродвигатель, редуктор с ручным дублером, через выходной вал приводящий в движение клапан трубопроводной арматуры, колодку электрических соединений, средства индикации и настройки, а также блок управления с возможностью подключения датчиков для управления по замкнутому контуру обратной связи и интерфейсы связи для обмена информацией с системой телемеханики, отличающийся тем, что в блок управления включены разделенные на равное число модулей выпрямитель и инвертор, а количество модулей может быть от одного до четырех; электродвигатель, редуктор с ручным дублером, электромагнитный тормоз, датчик положения ротора электродвигателя и датчик положения выходного вала размещены в функциональном сегменте электромеханическом, который с одной стороны присоединяется к клапану трубопроводной арматуры, а с другой стороны соединен с одной из граней центрального сегмента; колодка электрических соединений размещена в функциональном сегменте вводном, который соединен с одной из граней центрального сегмента, перпендикулярной грани, с которой соединен функциональный сегмент электромеханический; средства индикации и настройки размещены на функциональном сегменте лицевом, который соединен с одной из граней центрального сегмента таким образом, чтобы средства индикации и настройки не перекрывались элементами конструкции электропривода или трубопровода, на котором размещается клапан трубопроводной арматуры; первые модули выпрямителя и инвертора размещены в центральном сегменте, а вторые, третьи и четвертые модули выпрямителя и инвертора, при их наличии, размещены в соответствующем функциональном сегменте силовом, каждый из которых соединен с одной из граней центрального сегмента; остальные элементы электропривода трубопроводной арматуры размещены в центральном сегменте.
4. Электропривод по п. 3, отличающийся тем, что электродвигатель имеет встраиваемую бескорпусную конструкцию.
5. Электропривод по п. 3, отличающийся тем, что на одном валу с электродвигателем дополнительно размещен электромагнитный тормоз.
6. Электропривод по п. 3, отличающийся тем, что для обеспечения возможности управления по замкнутому контуру обратной связи используются датчик положения ротора электродвигателя и датчики тока электродвигателя.
7. Электропривод по п. 6, отличающийся тем, что для обеспечения возможности управления по замкнутому контуру обратной связи дополнительно используется датчик положения выходного вала, кинематически соединенный с выходом редуктора.
8. Электропривод по п. 3, отличающийся тем, что электродвигатель, редуктор с ручным дублером, электромагнитный тормоз, датчик положения ротора электродвигателя и датчик положения выходного вала соединены кинематически и расположены в функциональном сегменте электромеханическом таким образом, чтобы монтаж питающих кабелей и кабелей связи осуществлялся со стороны центрального сегмента.
9. Электропривод по п. 3, отличающийся тем, что функциональный сегмент электромеханический состоит из оболочки для редуктора с ручным дублером и цилиндрической оболочки для размещения и крепления электрического оборудования сегмента электромеханического, имеющей две грани, на одной из которых размещен фланец для соединения с центральным сегментом, а другая грань имеет конструктивные элементы для соединения с оболочкой для редуктора с ручным дублером.
10. Электропривод по п. 9, отличающийся тем, что соединение оболочки для редуктора с ручным дублером и цилиндрической оболочки для размещения и крепления электрического оборудования функционального сегмента электромеханического выполнено с обеспечением щелевой взрывозащиты.
11. Электропривод по п. 3, отличающийся тем, что функциональный сегмент вводной состоит из оболочки для размещения и крепления колодки электрических соединений, имеющей по меньшей мере одну грань, на которой размещен глухой фланец для соединения с центральным сегментом, и крышки, имеющей по меньшей мере одну внешнюю грань для размещения информационной таблички.
12. Электропривод по п. 11, отличающийся тем, что соединение оболочки для размещения и крепления колодки электрических соединений и крышки выполнено с обеспечением щелевой взрывозащиты, а глухой фланец обеспечивает герметизацию функционального сегмента вводного от остального корпуса.
13. Электропривод по п. 11 или 12, отличающийся тем, что на внешней поверхности оболочки для размещения и крепления колодки электрических соединений предусмотрены отверстия под герметичные кабельные вводы, а на глухом фланце оболочки размещены проходные изоляторы.
14. Электропривод по п. 3, отличающийся тем, что функциональный сегмент лицевой состоит из оболочки, имеющей по меньшей мере две грани, на одной из которых размещен фланец для соединения с центральным сегментом, а другая грань служит для размещения и крепления средств индикации и настройки и может содержать смотровое окно.
15. Электропривод по п. 3, отличающийся тем, что функциональный сегмент силовой состоит из оболочки для размещения и крепления модулей выпрямителя и инвертора, имеющей по меньшей мере две грани, на одной из которых которой размещен фланец для соединения с центральным сегментом, а другая грань является внешней и предназначена для размещения информационной таблички.
| СПОСОБ ПОЛУЧЕНИЯ ЭФИРОВ р,р-ДИГАЛОИДЗАМЕЩЕННЫХ ОКСИКАРБОНОВЫХ КИСЛОТ | 0 |
|
SU185880A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ СЖАТОГО ВОЗДУХА | 0 |
|
SU205093A1 |
| Гидравлический силовой цилиндр | 1959 |
|
SU130658A1 |
| RU 226727 U1, 19.06.2024 | |||
| US 4896562 A, 30.01.1990. | |||

