ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в общем, к области роботизированной хирургии. В частности, изобретение относится к хирургической системе с сенсорным восприятием для роботизированной лапароскопической хирургии, которая позволяет определять свойства ткани пациента, в частности, контактное усилие, прилагаемое к ткани, посредством измерения электрического импеданса.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Современные методы роботизированной лапароскопической хирургии позволяют выполнять вмешательства с высокой точностью, обеспечивающие соответствующие преимущества, в частности, в процессе хирургических операций определенной сложности, например, в процессе операций, когда сложно получать доступ к месту операции. Тем не менее, современные методы роботизированной лапароскопической хирургии имеют недостаток отсутствия у хирурга возможности воспринимать усилия, прилагаемые к анатомическим элементам пациента.
Роботизированные руки служат в роботизированной лапароскопической хирургии для приведения в действие конкретных инструментов, которые позволяют эффективно выполнять вмешательство, и для введения и направления камеры, которая позволяет наблюдать операционное поле. Управление данными роботизированными руками осуществляется хирургом удаленно посредством пульта управления, оборудованного экраном, который позволяет хирургу контролировать сцену. Аналогично, кроме повышения точности хирургической операции, применение компьютеров, относящихся к управлению роботизированной рукой, позволяет также включать в состав элементы управления, которые обеспечивают повышение безопасности пациента.
Б последние годы предприняты значительные исследовательские усилия в данной области, чтобы сделать возможным обеспечение сенсорного обратного канала к хирургу, восполняющего недостаток тактильной чувствительности, когда вмешательство является ручным вмешательством.
В патентной заявке US 2011046659-А1 описан минимально инвазивный хирургический инструмент, включающий в себя датчик, который формирует сигнал в ответ на взаимодействие с хирургическим инструментом. Инструмент дополнительно включает в себя систему тактильной обратной связи, которая формирует колебания для получения тактильного эффекта в ответ на сигнал.
С другой стороны, патент US8613230-B2 раскрывает систему, которая позволяет измерять усилия от датчика, установленного во внешней части канюли хирургического инструмента и получает усилия по оси Z проникания через оболочку механической передачи. Система, описанная в данном патенте, позволяет воспринимать только упомянутые усилия, прилагаемые по оси Z проникания, а не усилия, происходящие от боковых контактов.
Для обеспечения возможности восприятия усилий, прилагаемых не только в направлении оси Z проникания, применили упругие элементы, которые позволяют измерять трехмерные деформации интерференционным способом, с использованием оптических датчиков, как описано в патенте ЕР2595587-В1. В данном случае используют 3 или 4 оптических волокна, которые позволяют проецировать модулированный свет на отражатель, расположенный на упругой опоре, и интерференционным способом получают вектор усилия, прикладываемого к пинцету с наружной части канюли.
Патент СА 2870343 представляет альтернативу применению упругих элементов, собранных на канюле. Для этого применяют датчик с 6 степенями подвижности, и этот датчик обеспечивает предоставление усилий и вращательных моментов, создаваемых между внешним дистальным концом инструмента и концом, на котором инструмент удерживается роботизированной рукой, которая служит для него опорой. Система включает в себя компьютерную систему, которая обеспечивает вычисление матричным методом усилий, прилагаемых к дистальному концу, на основании кинематики узла инструмента-троакара и 6 элементов данных, выданных датчиком.
Заявка WO2016153561 раскрывает медицинский инструмент, который содержит удлиненный корпус, имеющий проксимальный конец и дистальный конец, и пару электродов или электродных участков (например, расщепленный электрод в сборе). Система выполнена с возможностью контактного измерения и/или подтверждения абляции на основе данных электрических измерений, получаемых в то время, когда энергия с разными частотами подается на пару электродов или электродных участков. Системы и способы контактного измерения могут калибровать данные измерений сетевых параметров, чтобы вводить поправку на аппаратный блок в схеме измерения сетевых параметров или учитывать различия используемых кабелей, контрольно-измерительных приборов или аппаратуры.
Документ US10595745-В2 раскрывает устройства и способы для измерения контактного усилия на катетере. Катетер включает в себя проксимальный сегмент, дистальный сегмент и упругий сегмент, продолжающийся от проксимального сегмента к дистальному сегменту. Дистальный сегмент включает в себя множество электродов для точечной сварки, включающих в себя, по меньшей мере, три радиальных электрода, расположенных по окружности дистального сегмента. Радиальные электроды выполнены с возможностью выдачи электрических сигналов, указывающих контактный вектор контактного усилия. Упругий сегмент включает в себя датчик усилия, выполненный с возможностью выдачи электрического сигнала, характеризующего величину аксиальной составляющей контактного усилия, при этом контактное усилие определяется пересчетом величины аксиальной составляющей контактного усилия по вектору контакта. Согласно данному документу, измерение контактного усилия выполняется механически, а не электрически, как в настоящем изобретении.
Документ US2003100892-А1 раскрывает роботизированный хирургический инструмент, который включает в себя удлиненный стержень, имеющий рабочий конец и ось стержня, и пару связующих звеньев, каждое из которых имеет проксимальный конец и дистальный конец. Проксимальный конец закреплен с возможностью поворота на рабочем конце стержня, чтобы поворачиваться вокруг первой поперечной оси для осуществления поворота по первому тангажу. Запястный элемент имеет проксимальный участок, поворотно соединенный с дистальным концом связующего звена, чтобы поворачиваться вокруг первой поперечной оси для осуществления поворота по второму тангажу. Рабочий орган закреплен с возможностью поворота на дистальном участке запястного элемента, чтобы поворачиваться вокруг запястной оси запястного элемента для осуществления поворота по крену на дистальной стороне. Запястная ось продолжается между проксимальным участком и дистальным участком запястного элемента. Удлиненный стержень способен поворачиваться вокруг оси стержня для осуществления поворота по крену на проксимальной стороне. При приблизительно 90° тангаже, запястная ось располагается, в общем, перпендикулярно оси стержня. Крен с проксимальной стороны вокруг оси стержня и крен с дистальной стороны вокруг запястной оси не перекрываются. Применение связующих звеньев позволяет оттягивать рабочий орган по тангажу на угол более 90°. Возможность управлять рабочим органом по тангажу на приблизительно 90° и оттягивать рабочий орган придает запястному механизму повышенную эксплуатационную гибкость и адаптивность для доступа в труднодоступные места, особенно, при небольших местах входа, например, предполагающих спинальное, невральное или ректальное хирургические поля.
В соответствии с другим направлением работы, известным как измерение усилий на основе обработки визуальной информации (VBFS), реальные изображения, полученные лапароскопической камерой, используются для наблюдения деформации ткани, вызываемой контактом с пинцетом.
В любом случае, в роботизированной лапароскопической хирургии практически не использовался сенсорный обратный канал из-за ограничений методов, неточности разных разработанных систем или связанных с этим сложностей, в частности, пространства, занимаемого датчиками, встраиваемыми в канюлю инструмента.
Поэтому требуются новые хирургические системы для роботизированной лапароскопической хирургии, которые позволяют определять свойства ткани/тканей и количественно определять по сенсорному обратному каналу контактное усилие, прилагаемое к ткани/тканям в процессе удаленно выполняемого хирургического вмешательства.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
С упомянутой целью, варианты осуществления настоящего изобретения предлагают хирургическую систему с сенсорным восприятием для роботизированной лапароскопической хирургии, содержащую: электрохирургический пинцет, соединенный с хирургическим инструментом, схему измерения импеданса и генератор радиочастотного сигнала для электрокаутеризации, электрически соединенный со схемой измерения импеданса и функционально предназначенный для подачи энергии, в форме как монополярной, так и биполярной энергии, к электрохирургическому пинцету. Схема измерения импеданса включает в себя измерительный датчик для измерения сигнала, характеризующего величину, соответствующую значению контактного импеданса между электрохирургическим пинцетом и тканью пациента; осциллятор для подачи сигнала питания в измерительный датчик; первую электрическую схему и вторую электронную схему. Первая электрическая схема включает в себя один или более резисторов и ограничитель напряжения для защиты измерительного датчика и осциллятора, которые подсоединены к электрохирургическому пинцету посредством кабеля питания хирургического инструмента. Вторая электронная схема содержит первую переключающую схему для переключения между подсоединением и отсоединением кабелей питания генератора радиочастотного сигнала для электрокаутеризации относительно кабеля хирургического инструмента и вторую переключающую схему для переключения между подсоединением и отсоединением генератора радиочастотного сигнала для электрокаутеризации и измерительного датчика.
Аналогично, предлагаемая система включает в себя, по меньшей мере, один процессор, функционально связанный с генератором радиочастотного сигнала для электрокаутеризации и схемой измерения импеданса для получения упомянутого сигнала, измеренного измерительным датчиком и преобразования упомянутого сигнала в вектор усилия. В частности, модуль вектора усилия является функцией измеренного контактного импеданса, и аргумент определяется траекторией, по которой следует хирургический инструмент в момент контакта.
Следовательно, упомянутый процессор позволяет получить векторное усилие реакции на операторских элементах управления, как по величине, так и по ориентации, на основании измеренной величины контактного импеданса, который изменяется в зависимости от оказываемого усилия, и контроля траектории следования.
В одном варианте осуществления предлагаемая система включает в себя также детектор радиочастотного излучения с, по меньшей мере, одним емкостным или индуктивным датчиком, расположенным на упомянутых кабелях питания для автоматического переключения первой и второй переключающей схем во время подачи энергии.
В одном варианте осуществления, энергия, подаваемая генератором радиочастотного сигнала для электрокаутеризации, является монополярной. В данном случае, первая переключающая схема образована одним реле, и вторая переключающая схема образована другим реле. В качестве альтернативы, когда подаваемая энергия является биполярной, первая переключающая схема образована, по меньшей мере, двумя реле, вторая переключающая схема образована также, по меньшей мере, двумя реле.
Система может дополнительно включать в себя блок управления, содержащий элементы управления, функционально связанные со схемой измерения импеданса и/или с генератором радиочастотного сигнала для электрокаутеризации с целью управления ими. Например, элементы управления могут включать в себя педали и/или рукоятки приводов/кнопки.
Процессор может быть включен в состав блока управления или в удаленное вычислительное устройство и функционально связан с блоком управления, генератором радиочастотного сигнала для электрокаутеризации и/или схемой измерения импеданса посредством кабельного или беспроводного соединения.
В одном варианте осуществления электрохирургический пинцет связан с хирургическим инструментом с использованием набора шкивов и тросов, которые делают возможными размыкание или смыкание, а также подвижность пинцета. При этом, по меньшей мере, один из шкивов располагается на его оси сочленения. Аналогично, набор шкивов располагается на трех параллельных осях, расположенных поперечно относительно хирургического инструмента и корпуса электрохирургического пинцета.
Другие варианты осуществления изобретения, раскрытые в настоящей заявке, включают в себя компьютеризованный способ и/или компьютерные программные продукты для выполнения этапов и операций, выполняемых упомянутым процессором. В частности, компьютерный программный продукт является вариантом осуществления, содержащим носитель, считываемый компьютерной системой и включающий в себя кодовые команды, запрограммированные на носителе, которые, при выполнении в, по меньшей мере, одном процессоре компьютерной системы, предписывают процессору выполнять операции, указанные в настоящей заявке в качестве вариантов осуществления изобретения.
В одном варианте осуществления анатомия окрестностей ткани/тканей моделируется на основании вектора усилия, оцененного процессором. С этой целью поверхность постепенно моделируется посредством определения многоугольных поверхностей, таких как, например, треугольники, которые образуются соединением соседних точек контакта, получаемых в процессе операции/вмешательства.
Следовательно, настоящее изобретение позволяет определять вектор усилия на основании измерения величины контактного импеданса между щипцами и тканями пациента и по измеренной траектории, а также позволяет составить трехмерную модель операционной окружающей среды.
Одно преимущество, предлагаемое настоящим изобретением, состоит в том, что изобретение не привносит никакого дополнительного датчика на электрохирургическом пинцете, что дает возможность применять те же самые провода, используемые, например, для осуществления электрокаутеризации или
электрокоагуляция.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанные и другие признаки и преимущества будут понятнее из нижеприведенного подробного описания нескольких всего лишь наглядных и неограничивающих вариантов осуществления, со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 - изображение хирургической системы для роботизированной лапароскопической хирургии с определением свойств ткани, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 2А-2С - схематические изображения разных конфигураций включения генератора радиочастотного сигнала для электрокаутеризации с целью работы в монополярном режиме (фиг. 2А) или биполярном режиме (фиг. 2 В и 2С).
Фиг. 3 - более подробное изображение архитектуры системы, предложенной для получения контактного импеданса и соответствующего вектора усилия, в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 4 - изображение другого варианта осуществления архитектуры системы, предложенной для получения контактного импеданса и соответствующего вектора усилия.
Фиг. 5А и 5 В - разные виды электрохирургического пинцета, соединенного с хирургическим инструментом. На фиг. 5А показан вид в перспективе дистального конца хирургического инструмента, представляющий повороты G1 и G2 его сочленения и поворот G3 вокруг собственной оси хирургического инструмента в сборе. На фиг. 5 В показаны шкивы для передачи перемещений G1 и G2 и расположение приводных тросов, которые допускают также размыкание или смыкание электрохирургического пинцета при посредстве поворота G1.
Фиг. 6A-6D - разные виды, представляющие путь кабелей, которые передают энергию электрохирургическому пинцету для определения контакта с тканью, при этом упомянутый путь должен быть совместимым с ограниченным пространством, доступным между разными шкивами, а также допускать выполнение поворотов G1, G2 и G3.
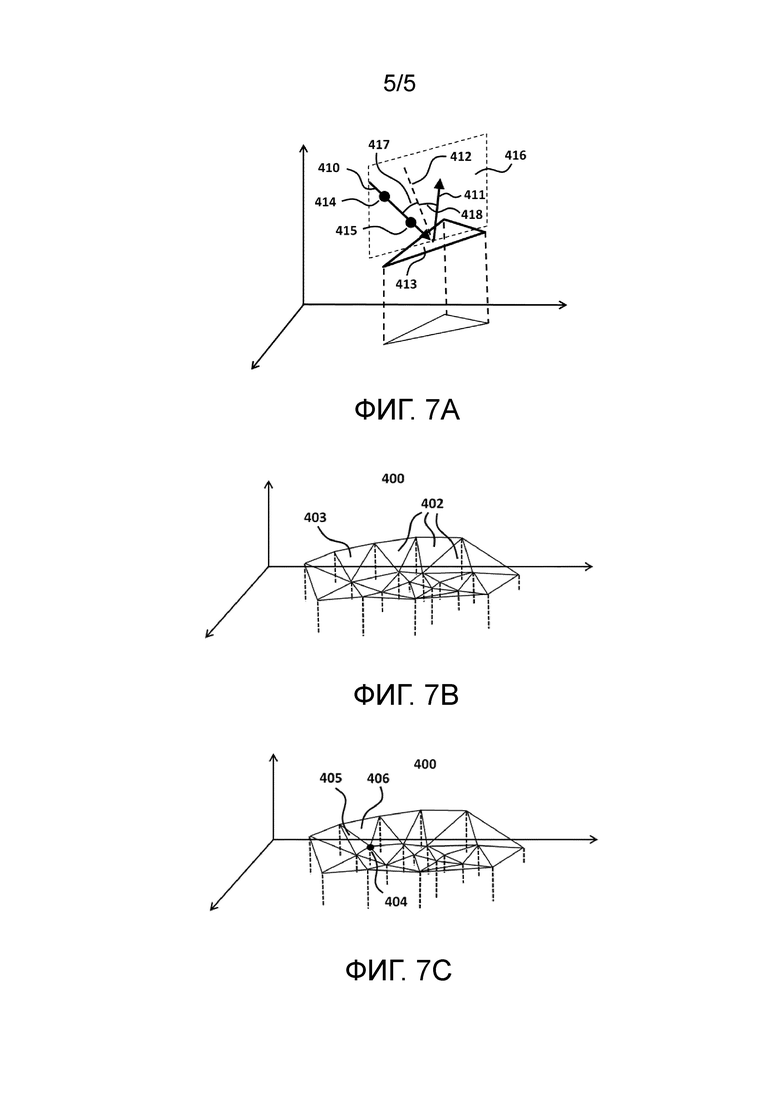
Фиг. 7А-7С - графическое изображение вычисленного вектора усилия и построения треугольников для моделирования анатомии окружающей среды, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает хирургическую систему с сенсорным восприятием для роботизированной лапароскопической хирургии и способ, позволяющий получить сенсорный обратный канал для усилия, прилагаемого хирургом к ткани/тканям пациента, в процессе удаленно выполняемого хирургического вмешательства, на основании оценки вектора прилагаемого усилия посредством определения импеданса контакта с тканью/тканями и на принятой траектории.
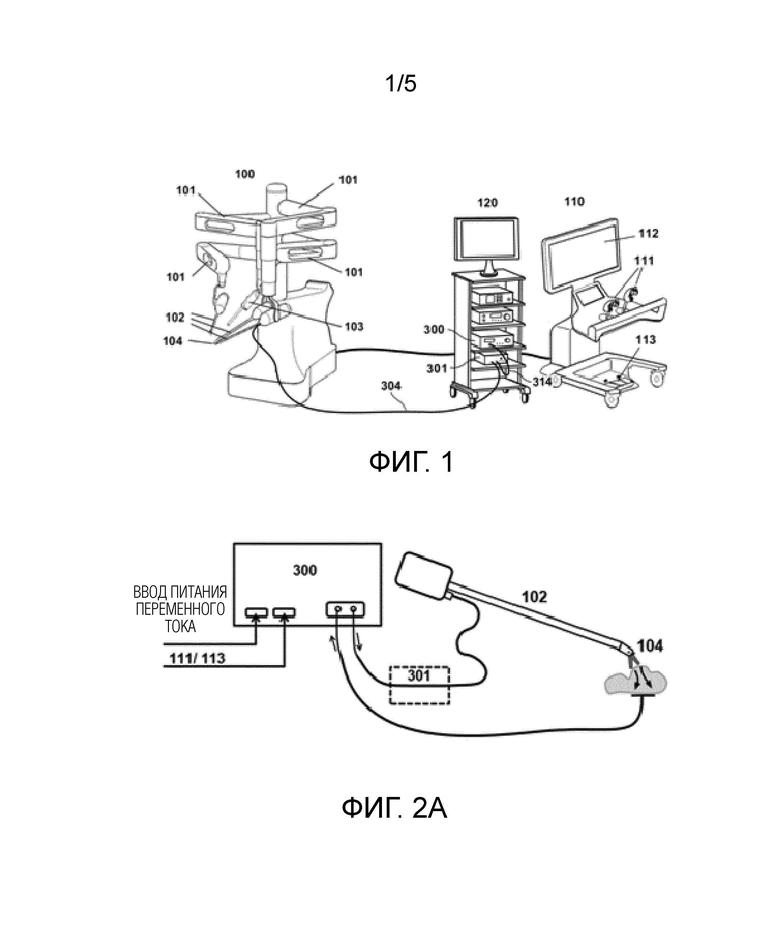
На фиг. 1 показан вариант осуществления предлагаемой системы 1. В данном варианте осуществления система 1 содержит роботизированную систему 100; блок 110 управления; стойку 120 для лапароскопии, вмещающую генератор 300 радиочастотного сигнала для электрокаутеризации и схему 301 измерения импеданса.
Роботизированная система 100 снабжена роботизированными руками 101, которые позволяют перемещать хирургические инструменты 102, а также лапароскопической камерой 103. Блок 110 управления включает в себя рукоятки приводов/кнопки 111 и педали 113, с помощью которых хирург может манипулировать/управлять роботизированной системой 100, генератор 300 радиочастотного сигнала для электрокаутеризации, а также схему 301 измерения импеданса. Блок 110 управления содержит также экран 112 дисплея.
Генератор 300 радиочастотного сигнала для электрокаутеризации, который может быть любым стандартным генератором сигнала для электрокаутеризации, имеет электрическое соединение со схемой 301 измерения импеданса посредством кабеля 314 питания и функционально предназначен для подачи энергии к электрохирургическому пинцету 104 (смотри фиг. 2А-2С, например), соединяемому с хирургическими инструментами 102. Схема 301 измерения импеданса имеет электрическое соединение с электрохирургическим пинцетом 104 посредством другого кабеля 304 питания. Кабель 304 питания образован двумя токопроводящими кабелями 304а, 304b (смотри фиг. 6D), путь которых совместим с кинематикой электрохирургического пинцета 102, что допускает его перемещение по трем углам поворота/осям (перемещения ориентации и по высоте, а также перемещения размыкания и/или смыкания), чтобы обеспечить возможность определения контакта с тканью/тканями.
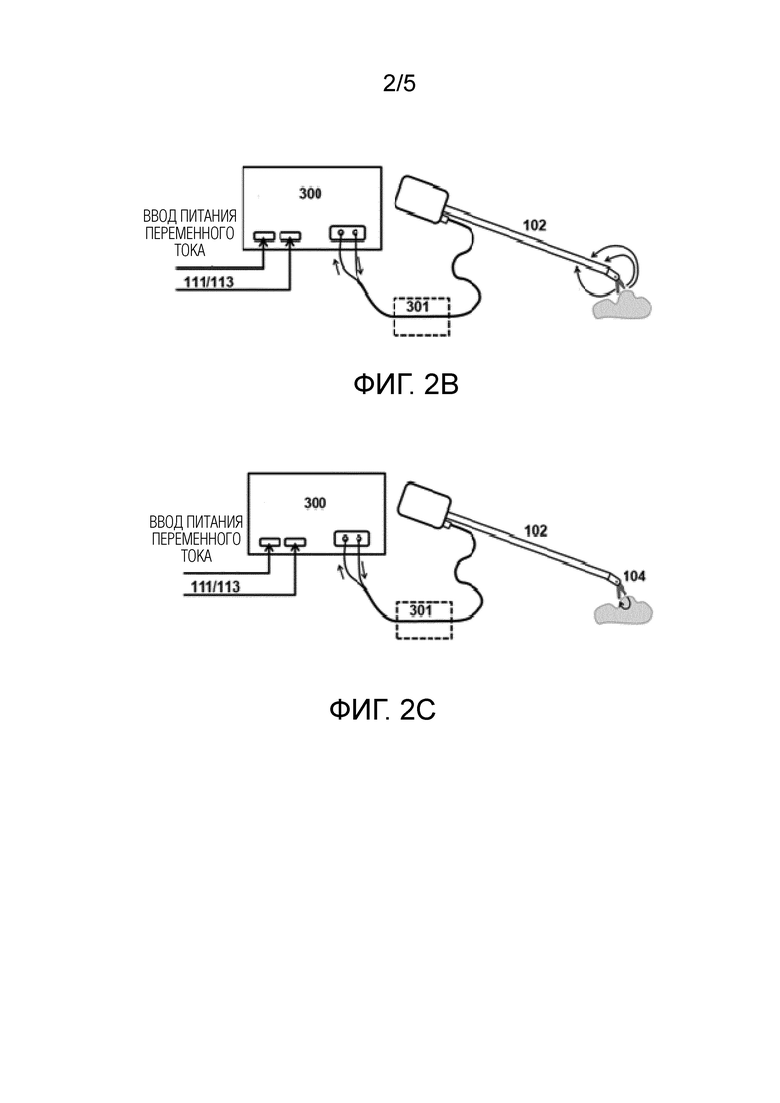
Генератор 300 радиочастотного сигнала для электрокаутеризации может быть электрически монополярным, когда обратной цепью является сам пациент или используемая солевая среда (фиг. 2А), или может быть электрически биполярным (фиг. 2 В и 2С), если ток протекает между оконечными элементами 250 (смотри фиг. 5А-5 В) электрохирургического пинцета 104.
На фиг. 2А показана монополярная конфигурация. Схема 301 измерения импеданса размещает только один кабель, т.е., выходящий кабель питания. Входящий кабель, обозначенный стрелкой, выходит наружу из схемы 301 измерения импеданса. На фиг. 2 В показана первая биполярная конфигурация. Сдвоенный входящий и выходящий кабель с двумя полярностями, обозначенными стрелками, выходит из генератора 300 радиочастотного сигнала для электрокаутеризации и проходит через схему 301 измерения импеданса, при этом обратный сигнал отводится через токопроводящую канюлю. На фиг. 2С показана вторая биполярная конфигурация. Кабель с двумя проводами, выходящими из генератора 300 радиочастотного сигнала для электрокаутеризации, пропускается через схему 301 измерения импеданса и проходит внутри нее, по одному проводу к каждой части электрохирургического пинцета 104.
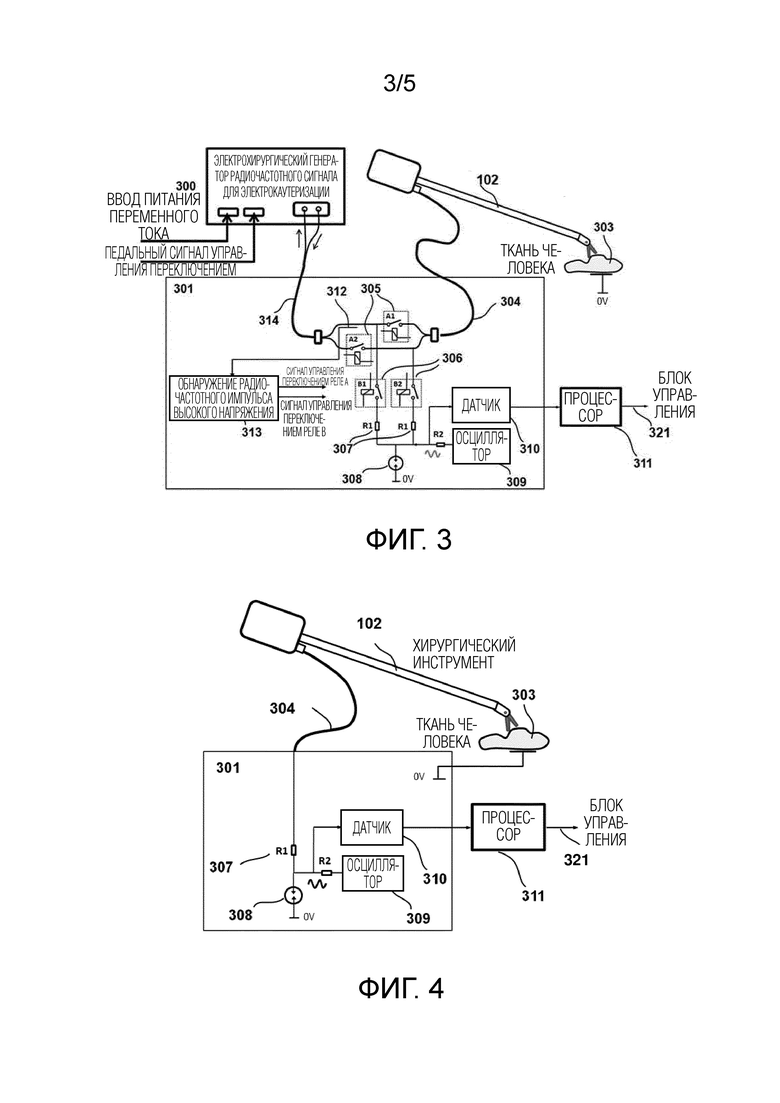
Далее на фиг. 3 показан другой вариант осуществления предлагаемой системы 1, содержащей в данном случае электрохирургический пинцет 104, соединенный с хирургическим инструментом 102 роботизированной системы 100; схему 301 измерения импеданса для измерения импеданса контакта с окружающей средой 303 ткани/тканей; генератор 300 радиочастотного сигнала для электрокаутеризации; и компьютерную(ое) систему или устройство 311, образованную(ое), по меньшей мере, одним процессором, для оценки прилагаемых усилий на основании измерения импеданса.
Затруднение, сопряженное с применением генератора 300 радиочастотного сигнала для электрокаутеризации также для измерения контактного импеданса, заключаются в том, что для обеспечения возможности выполнения электрокоагуляции и электрокаутеризации используются радиочастотные импульсы, имеющие очень высокое напряжение приблизительно 1000-3000 Вольт. По этой причине, при применении или включении в состав схемы 301 измерения импеданса в предлагаемой системе 1, измерение импеданса выполняется при низких напряжении и токе, совместимых с высокой энергией электрокоагуляции и электрокаутеризации при высоком напряжении.
Для достижения упомянутой совместимости, схема 301 измерения импеданса включает в себя измерительный датчик 310, в частности, низковольтный измерительный датчик, для измерения величины, соответствующей значению контактного импеданса; электронный модуль, содержащий две переключающих схемы 305, 306 для подсоединения/отсоединения кабелей 314 питания относительно кабеля 304 питания и для подсоединения/отсоединения, соответственно, генератора 300 радиочастотного сигнала для электрокаутеризации и измерительного датчика 310.
Аналогично, схема 301 измерения импеданса включает в себя также осциллятор 209 для обеспечения возможности измерения импеданса без всякой подачи тока, каким бы слабым он ни был, с постоянной составляющей, на пациенте. Осциллятор 209 обеспечивает сигнал, имеющий низкое напряжение, например 6 В, и среднюю частоту, например, 20 кГц, который подается в монополярном или биполярном режиме в хирургический инструмент 102 посредством второй переключающей схемы 306, контакты которой обычно поддерживаются в замкнутом состоянии. Упомянутое низкое напряжение обычно не подается на генератор 300 радиочастотного сигнала для электрокаутеризации, так как контакт первой переключающей схемы 305 обычно находится в разомкнутом состоянии.
В варианте осуществления на фиг. 3, каждая из переключающих схем 305, 306 содержит два реле A1, А2, B1, В2. Данная конфигурация особенно полезна, когда энергия подводится генератором 300 радиочастотного сигнала для электрокаутеризации в биполярном режиме. В других вариантах осуществления, не показанных в данном случае, и особенно когда энергия подводится генератором 300 радиочастотного сигнала для электрокаутеризации в монополярном режиме, каждая из переключающих схем 305, 306 включает в себя только одно реле A1, В1.
Во время работы, когда хирург подает энергию для осуществления электрокоагуляции или электрокаутеризации, контакт реле А1 или реле A1, А2 первой переключающей схемы 305 должен быть замкнут, тогда как контакт реле В1 или реле B1, В2 второй переключающей схемы 306 должен быть разомкнут.Для этого система 1 также, в частности, включает в себя детектор 313 радиочастотного излучения, содержащий емкостной или индуктивный датчик 312 на кабеле 314 питания, который допускает автоматическое переключение первой и второй переключающих схем 305, 306 в то время, когда подается энергия. В качестве альтернативы, данная функция может выполняться при подаче сигнала срабатывания от педали 113, подсоединенной к генератору 300 радиочастотного сигнала для электрокаутеризации.
В примере на фиг. 3, и с целью предотвращения повреждения в генераторе 300 радиочастотного сигнала для электрокаутеризации и/или в схеме 301 измерения импеданса, например, в результате скачков напряжения при переключении реле, система 1 защищается, в частности, резисторами 307 и ограничителем напряжения 308.
Сигнал/величина, соответствующий/ая значению импеданса, полученного измерительным датчиком 310, обрабатывается процессором 311 для преобразования в вектор усилия, для которого величина усилия дается значением измеряемого импеданса, и аргумент вектора определяется направлением в пространстве траектории, по которой хирургический инструмент 102 следует в момент контакта, и управление которой осуществляется блоком 110 управления, который соединен с процессором 311 по каналу 321 связи.
На фиг. 4 представлен другой вариант осуществления предлагаемой системы 1. В данном случае, система 1 образована электрохирургическим пинцетом 104, соединенным с хирургическим инструментом 102; схемой 301 измерения импеданса для измерения импеданса контакта с окружающей средой 303 ткани/тканей; и компьютерной системой или устройством 311, содержащим, по меньшей мере, один процессор. Схема 301 измерения импеданса включает в себя измерительный датчик 310, осциллятор 309 и электронную схему, образованную резисторами 307 и ограничителем напряжения 308. Следовательно, допускается совместимость с высокими внешними напряжениями, как в случае использования генератора 300 радиочастотного сигнала для электрокаутеризации.
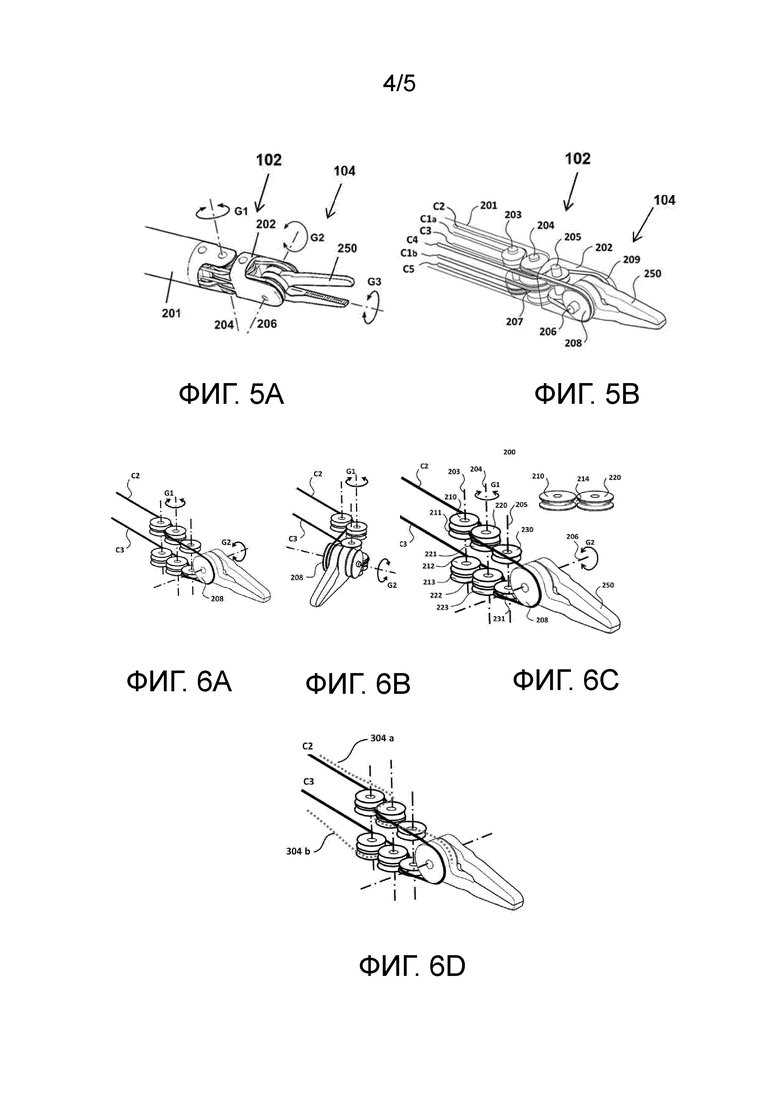
Каждый хирургический инструмент 102 (смотри фиг. 5А и 5 В) составлен из канюли 2 01, поддерживающей первый шарнирный элемент или корпус 202, который может выполнять поворот G1 относительно конца канюлю 201 вокруг оси 204, с приводом от барабана 207. Корпус 202 служит опорой для оконечного элемента 250 электрохирургического пинцета 104, ориентацию которого можно изменять выполнением поворота G2 относительно корпуса 202 вокруг оси 206, с приводом от барабанов 208 и 209.
Аналогично, тросы C1a, C1b, С2, С3, С4 и С5 и набор шкивов 210, 211, 212, 213, 220, 221, 222, 223, 230, 231 позволяют передавать перемещение от приводного средства, с которым соединен каждый хирургический инструмент 102, и предназначены для обеспечения возможности выполнения поворота G1 вокруг оси 204, что обуславливает механическую сложность, которая затрудняет включение в состав электрических кабелей 304а и 304b. Данная механическая сложность имеет большое значение, так как электрические проводники для измерения импеданса должны занимать меньше доступного пространства вместе с двумя тросами C1a и C1b, которые передают поворотное перемещение G1 на барабан 207, и четырьмя тросами С2, С3, С4 и С5, которые передают движения для ориентации и размыкания и смыкания электрохирургического пинцета 104 посредством барабанов 208 и 209 (фиг. 5 В).
Для обеспечения возможности поворота G1 применяется упомянутый набор шкивов 210, 211, 212, 213, 220, 221, 222, 223, 230, 231, в котором, по меньшей мере, один, предпочтительно все, из упомянутых шкивов располагается(ются) на его оси сочленения (фиг. 6А). В частности, как видно на фиг. 6 В, набор шкивов составлен для четырех тросов С2, С3, С4 и С5, которые перемещают электрохирургический пинцет 104, смонтированный на трех параллельных осях 203, 204 и 205, расположенных поперечно относительно канюли 201 и корпуса 202 (фиг. 5 В). Центральная ось 204 соединяет канюлю 201 и корпус 202, допускает выполнение поворота G1 и служит опорой для 4 шкивов 220, 221, 222 и 223, соединяющих две пары противодействующих тросов, передающих перемещение пинцету, тогда как две оси 203 и 205 служат опорой для сопутствующих шкивов.
Данное расположение шкивов на трех последовательных осях для каждого троса, который должен проходить сочленение G1, предлагает очевидное преимущество над другими вариантами осуществления, с учетом того, что, помимо обеспечения создания направляемого прохода тросов между последовательными шкивами, как в случае шкивов 210 и 220, которые создают проход 214 (смотри фиг. 5С), обеспечивающий надежное направление перемещения каждого троса, на шкивах 230 и 231 созданы два свободных пространства, позволяющих провести необходимый электрический кабель 304а и 304b, чтобы обеспечивать возможность измерения импеданса.
Тот факт, что все шкивы располагаются на центральной плоскости канюли 201 и корпуса 202, допускает использование шкивов с максимально возможным диаметром, без превышения максимального размера канюли 201. Аналогично, при использовании шкивов в конфигурации 4+4+2, необходимых для передачи перемещений и имеющих максимально возможный диаметр, настоящее изобретение допускает увеличение радиуса кривизны разных тросов на шкивах, что повышает длительную прочность и надежность хирургического инструмента 102. Электрический кабель 304а и 304b, проходящий через свободные пространства на шкивах 230, составляет единое целое с тросами С2 и С3, при обеспечении условия, что кабель не поддерживает никакого механического усилия, когда происходит отклонение электрохирургического пинцета 104 на оси G2 (фиг. 6D).
Варианты осуществления настоящего изобретения обеспечивают также способ сенсорного восприятия для оценки или вычисления вектора усилия реакции, которое должно восприниматься хирургом или оператором на блоке 110 управления через кнопки/рукоятки приводов 111 и/или педали 113, на основании значения/величины получаемого импеданса.
Фиг. 7А-7С представляют графически пример вышеописанного способа. При условии, что на хирургическом инструменте 102 отсутствует датчик усилия, который допускает прямое измерение контактного усилия 410 (фиг. 7А), оно косвенно оценивается процессором 311 в форме вектора усилия. Вектор 411 усилия оценивается как отраженный вектор относительно контактного усилия 410, модуль которого равен модулю контактного усилия 410, а его аргумент определяется по нахождению в той же плоскости 416, и который определяется двумя проходимыми точками 414 и 415 перед воспринятой точкой контакта, нормалью 412 к поверхности 413 контакта и углом отражения 418, который равен углу 417 падения.
Поверхность 413 контакта, который допускает выполнение позиционных вычислений в пространстве отраженного вектора, не известна. Поэтому предложенный способ получает приближенную конфигурацию поверхности анатомических элементов окружающей среды посредством моделирования 400 в трехмерном пространстве. С этой целью способ содержит этап формирования триангуляции 402 (т.е., формирования ряда треугольников 403) по точкам 404 контакта, которые воспринимаются в процессе работы, путем их соединения. Каждая новая воспринятая точка 404 контакта (фиг. 9С) приводит к разбиению треугольника 403 на новые треугольники 405 и 406. Таким образом, разрешение моделирования окружающей среды, которое позволяет получить аргумент вектора 411 усилия, который применяется как усилие реакции, действующее на элементы управления блока 110 управления, и создает сенсорный обратный канал для хирурга/оператора, постепенно повышается.
Предлагаемое изобретение может быть реализовано в форме аппаратуры, программного обеспечения, встроенных микропрограмм или любой их комбинации. Если оно реализовано в программном обеспечении, функции могут храниться или кодироваться в виде одной или более команд или кода на компьютерно-читаемом носителе.
Объем настоящего изобретения определяется прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ГЕНЕРАТОР ЭНЕРГИИ ДЛЯ ЭЛЕКТРОИМПУЛЬСНОГО ОТКРЫТИЯ КЛЕТОЧНЫХ ПОР | 2019 |
|
RU2777944C2 |
| ХИРУРГИЧЕСКИЕ УЗЕЛ И СИСТЕМА, А ТАКЖЕ СХЕМА КОМПЕНСАЦИИ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА | 2018 |
|
RU2766665C2 |
| ИНСТРУМЕНТ ДЛЯ ЛАПАРОСКОПИИ | 2012 |
|
RU2625581C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2772395C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ЗОНД ДЛЯ ДОСТАВКИ РАДИОЧАСТОТНОЙ И МИКРОВОЛНОВОЙ ЭНЕРГИИ | 2017 |
|
RU2740678C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ | 2013 |
|
RU2657960C2 |
| ХИРУРГИЧЕСКИЕ УЗЕЛ, СИСТЕМА И ЭЛЕКТРОДНЫЙ УЗЕЛ | 2018 |
|
RU2771423C2 |
| БИПОЛЯРНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2015 |
|
RU2709679C2 |
Группа изобретений относится к медицине. Система с сенсорным восприятием для роботизированной лапароскопической хирургии содержит электрохирургический пинцет, соединенный с хирургическим инструментом, генератор радиочастотного сигнала для электрокаутеризации и схему измерения импеданса. Последняя включает в себя измерительный датчик для измерения сигнала, характеризующего величину, соответствующую значению контактного импеданса между пинцетом и тканью пациента; осциллятор; первую электрическую схему с резисторами и ограничителем напряжения для защиты измерительного датчика и осциллятора; и вторую электронную схему с переключателями. Датчик и осциллятор подсоединены к пинцету кабелем питания хирургического инструмента. Процессор, подсоединенный к схеме измерения, принимает упомянутый измеренный сигнал и преобразует его в вектор усилия, является функцией измеряемого контактного импеданса, и аргумент является функцией проходимой траектории. Применение данной группы изобретений позволяет определять свойства ткани/тканей и количественно определять по сенсорному обратному каналу контактное усилие, прилагаемое к ткани/тканям в процессе удаленно выполняемого хирургического вмешательства. 2 н. и 8 з.п. ф-лы, 7 ил.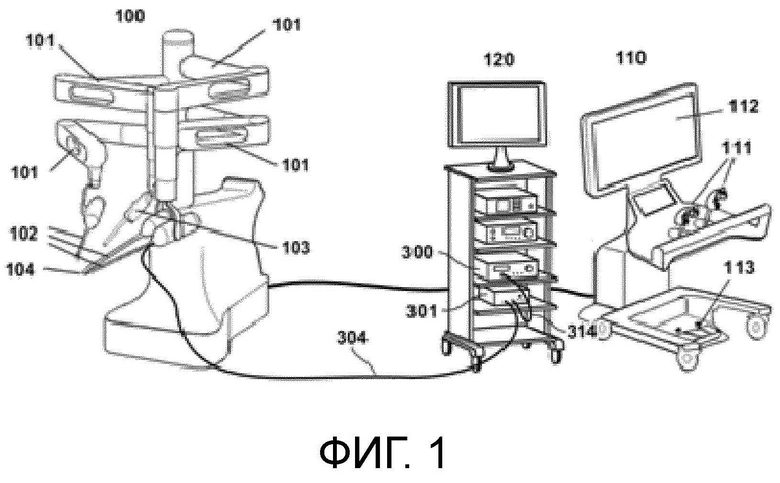
1. Хирургическая система с сенсорным восприятием для роботизированной лапароскопической хирургии, содержащая:
электрохирургический пинцет (104), соединенный с хирургическим инструментом (102);
генератор (300) радиочастотного сигнала для электрокаутеризации, электрически соединенный со схемой (301) измерения импеданса и функционально предназначенный для подачи энергии к электрохирургическому пинцету (104);
схему (301) измерения импеданса, содержащую:
измерительный датчик (310), выполненный с возможностью измерения сигнала, указывающего величину, соответствующую значению контактного импеданса между электрохирургическим пинцетом (104) и тканью пациента;
осциллятор (309), выполненный с возможностью подачи сигнала питания в измерительный датчик (310);
первую электрическую схему, содержащую резисторы (307) и ограничитель (308) напряжения, выполненный с возможностью защиты измерительного датчика (310) и осциллятора (309), при этом измерительный датчик (310) и осциллятор (309) подсоединены к электрохирургическому пинцету (104) кабелем (304) питания хирургического инструмента (102);
вторую электронную схему, содержащую первую переключающую схему (305), выполненную с возможностью переключения между подсоединением и отсоединением кабелей (314) питания генератора (300) радиочастотного сигнала для электрокаутеризации относительно кабеля (304) питания хирургического инструмента (102), и вторую переключающую схему (306), выполненную с возможностью переключения между подсоединением и отсоединением генератора (300) радиочастотного сигнала для электрокаутеризации и измерительного датчика (310); и
детектор (313) радиочастотного излучения, содержащий емкостной или индуктивный датчик (312), расположенный на упомянутых кабелях (314) питания, выполненный с возможностью автоматического переключения первой и второй переключающих схем (305, 306) во время подачи энергии; и
процессор (311), функционально связанный со схемой (301) измерения импеданса, чтобы принимать упомянутый сигнал, измеренный измерительным датчиком (310), и преобразовывать данный сигнал в вектор усилия, причем последний оценивается как отраженный вектор принятого сигнала, причем модуль упомянутого вектора является функцией контактного импеданса, и аргумент вектора определяется траекторией, по которой следует хирургический инструмент (102) в момент контакта с тканью.
2. Система по п. 1, в которой генератор (300) радиочастотного сигнала для электрокаутеризации выполнен с возможностью подачи упомянутой энергии в режиме как монополярной, так и биполярной энергии.
3. Система по п. 1, в которой подаваемая энергия является монополярной, и при этом первая переключающая схема (305) и вторая переключающая схема (306), каждая, содержит реле (A1, B1).
4. Система по п. 1, в которой подаваемая энергия является биполярной, и при этом первая переключающая схема (305) и вторая переключающая схема (306), каждая, содержит, по меньшей мере, два реле (A1, A2, B1, B2).
5. Система по п. 1, дополнительно содержащая блок (110) управления, содержащий элементы (111, 113) управления, функционально связанные со схемой (301) измерения импеданса и генератором (300) радиочастотного сигнала для электрокаутеризации, для управления ими.
6. Система по п. 5, в которой элементы управления содержат педали (113) и/или рукоятки приводов/кнопки (111).
7. Система по п. 5 или 6, в которой в блоке (110) управления содержится процессор (311).
8. Система по п. 1, в которой электрохирургический пинцет (104) связан с хирургическим инструментом (102) с использованием набора шкивов (210, 211, 212, 213, 220, 221, 222, 223, 230, 231) и тросов (C1a, C1b, C2, C3, C4 и C5), которые делают возможными размыкание или смыкание электрохирургического пинцета (104) и его подвижность, при этом, по меньшей мере, один из шкивов (210, 211, 212, 213, 220, 221, 222, 223, 230, 231) располагается на его оси сочленения.
9. Система по п. 8, в которой набор шкивов (210, 211, 212, 213, 220, 221, 222, 223, 230, 231) располагается на трех параллельных осях (203, 204, 205), расположенных поперечно относительно хирургического инструмента (102) и корпуса (202) электрохирургического пинцета (104).
10. Компьютерно-читаемый носитель, содержащий команды программного кода, для обработки данных хирургической системы с сенсорным восприятием для роботизированной лапароскопической хирургии по пп. 1-9, выполняемых процессором, при этом команды кода, при выполнении процессором, осуществляют способ оценки вектора воспринимаемого усилия реакции в блоке управления посредством следующих этапов:
прием сигнала, характеризующего величину, соответствующую значению контактного импеданса между электрохирургическим пинцетом (104) и тканью пациента, измеренного измерительным датчиком (310);
преобразование принятого сигнала в вектор усилия, причем последний оценивается как отраженный вектор принятого сигнала, модуль упомянутого вектора является функцией контактного импеданса, и аргумент вектора определяется траекторией, по которой следует хирургический инструмент (102) в момент контакта с тканью.
| WO 2016153561 A1, 29.09.2016 | |||
| US 10595745 B2, 24.03.2020 | |||
| US 2003100892 A1, 29.05.2003 | |||
| US 10575900 B2, 03.03.2020 | |||
| US 2008046122 A1, 21.02.2008 | |||
| US 6203541 B1, 20.03.2001. |

