[001] Настоящее изобретение относится к хирургическим узлу и системе, а также схеме компенсации напряжения постоянного тока.
[002] Частицы вещества в аэрозольной форме часто встречаются в процессе проведения хирургических процедур. Например, они либо могут использоваться для доставки терапевтического агента, либо с ними можно столкнуться в результате проведения хирургической процедуры. Примером применения терапевтических агентов на основе частиц служит доставка агентов для обеспечения быстрого свертывания крови или для лечения заболеваний, таких как рак. Типичным примером взвешенных частиц, образуемых в результате проведения хирургической процедуры, являются те, с которыми сталкиваются при применении хирургических инструментов, работающих на основе энергетического принципа. Хирургические инструменты, работающие на основе энергетического принципа, снабжаются энергией некоторым способом, чтобы обеспечить терапевтический эффект, такой как рассечение или коагуляция ткани. Хотя существует несколько механизмов действия, таких как радиочастотный (RF), ультразвуковой и лазерный, все эти инструменты, работающие на основе энергетического принципа, создают взвешенные частицы в качестве побочного продукта их механизма действия.
[003] Взвешенные частицы, образуемые в аэрозольной форме инструментами, работающими на основе энергетического принципа, проблематичны по меньшей мере по двум причинам. Во-первых, они быстро уменьшают зону видимости для хирурга, а потому замедляют проведение хирургической процедуры и создают риск случайного причинения вреда пациенту вследствие плохой видимости. Во-вторых, существуют опасения, что длительное подвергание воздействию взвешенных частиц, создаваемых этими инструментами, может представлять опасность для работников здравоохранения. В прошлом для извлечения из операционного поля взвешенных частиц аэрозолей использовались вакуумные системы. Однако, поскольку это является способом, основанным на уменьшении концентрации, он неэффективен для быстрого удаления взвешенных частиц и улучшения зоны видимости. Кроме того, при проведении хирургических процедур, требующих инсуффляции газа для создания операционного пространства, например в лапароскопической хирургии, образуемый газообмен сушит и обезвоживает ткань, что оказывает вредное воздействие на пациента. Вследствие этого, а также по причине того, что вакуумные системы являются шумными и громоздкими, внедрение вакуумных систем не было успешным.
[004] В WO 2011/010148 раскрыт альтернативный подход для решения проблемы образования взвешенных частиц при проведении хирургических процедур посредством устройства для уменьшения образования и удаления хирургического дыма и других аэрозольных взвешенных частиц, образуемых в ходе электрохирургических процедур. Устройство генерирует поток электронов из заостренного электрода, размещенного вблизи участка хирургического вмешательства, например в брюшной полости, при этом электроны, испускаемые электродом, притягиваются к частицам аэрозоля, находящимся поблизости во взвешенном состоянии. Устройство дополнительно создает разность электрических потенциалов между электродом и телом пациента для притяжения ионизированных частиц с участка хирургического вмешательства, тем самым улучшая обзор хирургу на этом участке.
[005] Однако электрод, размещаемый, например, в брюшной полости, требует дополнительного рассечения стенки брюшной полости, что является нежелательным действием. Эффективность устройства также зависит от позиционирования электрода относительно участка хирургического вмешательства и других хирургических инструментов, и, таким образом, зависит от опыта и мастерства хирурга.
[006] Авторами изобретения предложены хирургические узел и система, призванные устранить по меньшей мере некоторые из вышеупомянутых ограничений.
[007] Согласно первому аспекту настоящего изобретения предложен хирургический узел, содержащий коммутационный узел, выполненный с возможностью приема первого сигнала для использования при генерировании электрического поля проксимально к участку проведения хирургической процедуры для удаления частиц, находящихся во взвешенном состоянии проксимально к участку хирургического вмешательства, а также второго сигнала для использования при рассечении, ушивании или каутеризации ткани пациента в ходе хирургической процедуры, при этом узел дополнительно содержит хирургический инструмент, содержащий рабочую часть инструмента, при этом коммутационный узел выполнен с возможностью переключения подачи первого сигнала и второго сигнала на рабочую часть инструмента, а также контроллер для управления подачей первого сигнала на рабочую часть инструмента в течение первого временного интервала и подачей второго сигнала на рабочую часть инструмента в течение второго временного интервала, при этом контроллер содержит схему синхронизации, выполненную с возможностью определения времени подачи первого сигнала на рабочую часть инструмента после второго интервала, так что первый и второй интервалы представляют собой неперекрывающиеся интервалы.
[008] В одном варианте осуществления первый и второй сигналы отделены третьим интервалом, в течение которого первый и второй сигналы устраняются с рабочей части инструмента.
[009] В одном варианте осуществления узел дополнительно содержит первый генератор для генерирования первого сигнала, при этом рабочая часть инструмента выполнена соединяемой с первым генератором с возможностью передачи данных. Узел дополнительно содержит схему обнаружения для опознавания второго сигнала от второго генератора, когда он проходит через контроллер, при этом схема обнаружения выполнена с возможностью выдачи сигнала обнаружения на контроллер в зависимости от обнаруженного второго сигнала. Предполагается, что данная схема обнаружения будет в особенности полезна, когда второй сигнал содержит, например, ультразвуковой или лазерный сигнал. Первый интервал соответствует интервалу, в течение которого второй сигнал ниже второго порогового значения, а второй интервал соответствует интервалу, в течение которого первый сигнал ниже первого порогового значения. Первое и второе пороговые значения предпочтительно соответствуют первому и второму значениям сигнала, ниже которых первый и второй сигналы не способны обеспечить выполнение своей хирургической функции по устранению частиц, а также рассечению, ушиванию или каутеризации соответственно.
[0010] В одном варианте осуществления контроллер содержит по меньшей мере один исполнительный механизм, выполненный с возможностью управления подачей первого и второго сигналов на рабочую часть инструмента. Исполнительный механизм может содержать ручной переключатель, расположенный на хирургическом инструменте. В качестве альтернативы исполнительный механизм может содержать исполнительный механизм с ножным приводом. В качестве дополнительной альтернативы исполнительный механизм может располагаться удаленно от участка хирургического вмешательства, например, при выполнении роботизированных операций.
[0011] В одном варианте осуществления контроллер содержит исполнительный механизм блокирования для активации первого сигнала. В любой момент времени в течение первого временного интервала или после первого интервала, а именно в течение времени, когда первый сигнал не подается на рабочую часть инструмента, но до начала второго интервала, а именно до подачи второго сигнала на рабочую часть инструмента, при приведении в действие исполнительного механизма блокирования контроллер может дополнительно подавать первый сигнал на рабочую часть инструмента, когда исполнительный механизм блокирования активирован. Предполагается, что данное средство будет полезным для хирургов, которые желают устранить большие скопления взвешенных частиц, в том числе хирургический дым.
[0012] В одном варианте осуществления схема синхронизации выполнена с возможностью задержки коммутации первого и второго сигналов, подаваемых на рабочую часть инструмента, вслед за командой, поступающей от контроллера, чтобы позволить остаточным емкостным напряжениям и индукционным токам в первом и втором генераторах сигналов рассеяться или снизиться ниже соответствующих пороговых значений.
[0013] В одном варианте осуществления первый генератор содержит первый электрический генератор, при этом первый электрический полюс первого генератора выполнен с возможностью электрического соединения с рабочей частью инструмента, а второй электрический полюс первого генератора выполнен с возможностью электрического соединения с пациентом. Второй электрический полюс может быть выполнен с возможностью электрического соединения с пациентом посредством адгезивной прокладки и токопроводящего геля. Первый и второй генераторы могут иметь общий второй электрический полюс.
[0014] В одном варианте осуществления первый электрический генератор выполнен с возможностью генерирования сигнала постоянного тока, чтобы установить направленное электрическое поле между рабочей частью инструмента и биологической тканью пациента. Узел может дополнительно содержать второй генератор для генерирования второго сигнала. В одном варианте осуществления второй генератор содержит второй электрический генератор, выполненный с возможностью генерирования радиочастотного сигнала переменного тока.
[0015] В одном варианте осуществления рабочая часть инструмента содержит по меньшей мере один центр генерирования ионов. Центр генерирования ионов может содержать, например, заостренный дистальный конец рабочей части инструмента и/или зубчатый участок рабочей части инструмента.
[0016] В одном варианте осуществления рабочая часть инструмента имеет линейную конфигурацию, J-образную конфигурацию, L-образную конфигурацию либо может содержать, например, лезвие или щипцы, содержащие пару противоположных щечек.
[0017] В одном варианте осуществления рабочая часть инструмента выполнена соединяемой с возможностью разъединения с хирургическим инструментом. Рабочая часть инструмента может содержать, например, подлежащую утилизации рабочую часть инструмента одноразового применения. Инструмент может также содержать, например, подлежащий утилизации инструмент одноразового применения.
[0018] В одном варианте осуществления хирургический инструмент содержит корпус, по меньшей мере часть которого служит в качестве рукоятки. Контроллер предпочтительно расположен в корпусе.
[0019] В одном варианте осуществления первый и второй сигналы передаются на рабочую часть инструмента посредством соединительного кабеля, выполненного с возможностью электрического соединения с первым генератором посредством кабельного соединителя.
[0020] В одном варианте осуществления остаточный емкостной заряд, накопленный на протяжении предшествующего первого или второго интервала, имеет возможность разрядиться или рассеяться в течение третьего интервала. В одном варианте осуществления узел дополнительно содержит по меньшей мере один резистор для обеспечения возможности разряжения или рассеивания остаточного заряда.
[0021] В одном варианте осуществления узел дополнительно содержит датчик приближения для определения близости дистального конца рабочей части инструмента к ткани пациента.
[0022] В одном варианте осуществления узел дополнительно содержит схему компенсации напряжения для поддержания по существу постоянной разности потенциалов между дистальным концом рабочей части инструмента и тканью пациента вне зависимости от расстояния между рабочей частью инструмента и тканью пациента. Схема компенсации напряжения выполнена с возможностью поддержания по существу постоянной разности потенциалов, когда ток, проходящий между рабочей частью инструмента и тканями пациента, варьируется в диапазоне 0-100 мкА, предпочтительно 0-50 мкА, более предпочтительно 0-10 мкА.
[0023] В одном варианте осуществления схема компенсации напряжения содержит резисторную схему, которая может электрически соединяться с выходом первого генератора, а также процессор, выполненный с возможностью приема в качестве входного сигнала целевого напряжения и сигнала, характеризующего электрический ток, проходящий через резисторную схему, при этом процессор выполнен с возможностью обработки этого сигнала и увеличения выходного напряжения первого генератора на величину, соответствующую падению напряжения на резисторной схеме.
[0024] В одном варианте осуществления узел дополнительно содержит аналоговый замкнутый контур для управления с обратной связью током на выходе первого генератора. Аналоговый замкнутый контур выполнен с возможностью ограничения тока, поступающего от первого генератора, до максимального значения 100 мкА.
[0025] Согласно второму аспекту настоящего изобретения предложена хирургическая система, содержащая хирургический узел по первому аспекту, первый генератор для генерирования первого сигнала для использования при генерировании электрического поля проксимально к участку проведения хирургической процедуры для удаления частиц, находящихся во взвешенном состоянии проксимально к участку хирургического вмешательства, которые образовались в результате проведения хирургической процедуры, а также второй генератор для генерирования второго сигнала для использования при рассечении или каутеризации биологической ткани пациента в ходе хирургической процедуры.
[0026] Согласно третьему аспекту настоящего изобретения предложена схема компенсации напряжения постоянного тока для изменения выходного напряжения DC-генератора, подаваемого на рабочую часть инструмента, для поддержания по существу постоянной разности потенциалов между дистальным концом рабочей части инструмента и тканью пациента вне зависимости от электрического импеданса, создаваемого расстоянием между рабочей частью инструмента и тканью пациента, при этом схема содержит резисторную схему, которая может электрически соединяться с выходом DC-генератора, а также процессор, выполненный с возможностью приема в качестве входного сигнала целевого напряжения и сигнала, характеризующего электрический ток, проходящий через резисторную схему, при этом процессор выполнен с возможностью обработки этого сигнала и увеличения выходного напряжения, поступающего с электрохирургического генератора, на величину, соответствующую падению напряжения на резисторной схеме.
[0027] Согласно четвертому аспекту настоящего изобретения предложен способ подачи первого сигнала и второго сигнала к рабочей части инструмента, при этом первый сигнал используется при генерировании электрического поля проксимально к участку проведения хирургической процедуры для удаления частиц, находящихся во взвешенном состоянии проксимально к участку хирургического вмешательства, а второй сигнал используется при рассечении, ушивании или каутеризации ткани пациента в ходе хирургической процедуры, при этом способ содержит подачу первого сигнала на рабочую часть инструмента в течение первого временного интервала и прикладывание второго сигнала к рабочей части инструмента в течение второго временного интервала, причем способ содержит синхронизацию подачи первого сигнала на рабочую часть инструмента после второго интервала, так что первый и второй интервалы представляют собой неперекрывающиеся интервалы.
[0028] Дополнительные признаки хирургической системы или схемы компенсации напряжения постоянного тока, или способа могут содержать один или несколько отличительных признаков хирургического узла, описанного выше.
[0029] При том, что изобретение описано выше, оно распространяется на любую обладающую признаками изобретения комбинацию признаков, изложенных выше или в нижеследующем описании. Хотя иллюстративные варианты осуществления изобретения подробно описаны в настоящем документе со ссылкой на сопроводительные чертежи, следует понимать, что изобретение не ограничивается этими конкретными вариантами осуществления.
[0030] Кроме того, предполагается, что конкретный отличительный признак, описанный либо отдельно, либо в качестве части варианта осуществления, может быть объединен с другими отдельно описанными признаками либо частями других вариантов осуществления, даже если в других признаках и вариантах осуществления данный конкретный признак не упоминается. Следовательно, изобретение распространяется на конкретные комбинации, которые еще не были описаны.
[0031] Изобретение может быть реализовано различными способами, при этом его варианты осуществления, приведенные лишь в качестве примера, будут описаны ниже со ссылкой на сопроводительные чертежи, где
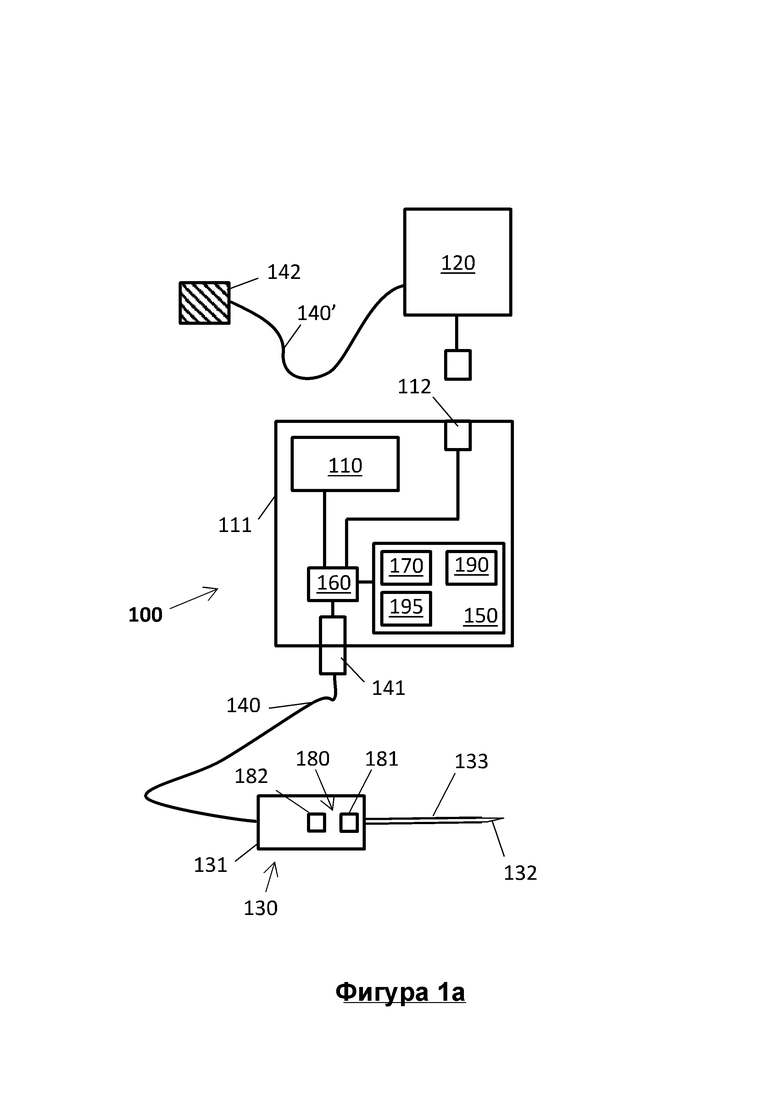
[0032] Фигура 1a - схематичное изображение хирургического узла согласно одному варианту осуществления настоящего изобретения;
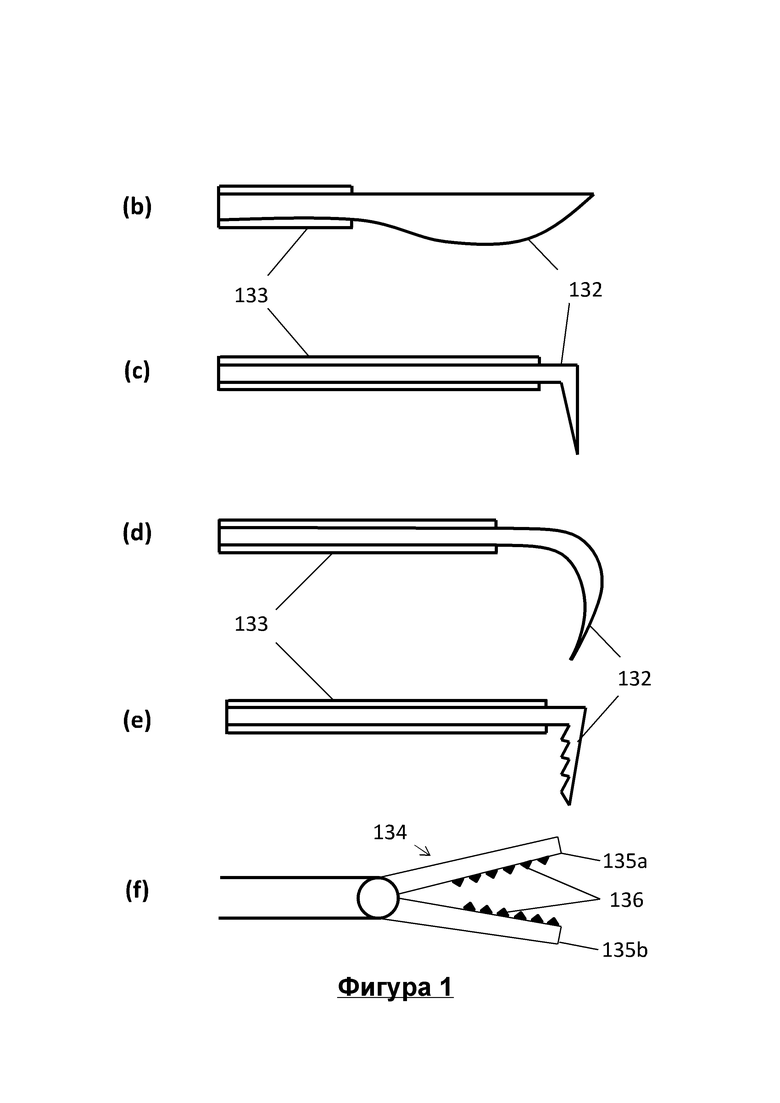
[0033] Фигуры 1b-1f - схематичные изображения альтернативных рабочих частей инструмента для использования в инструменте узла по Фигуре 1a;
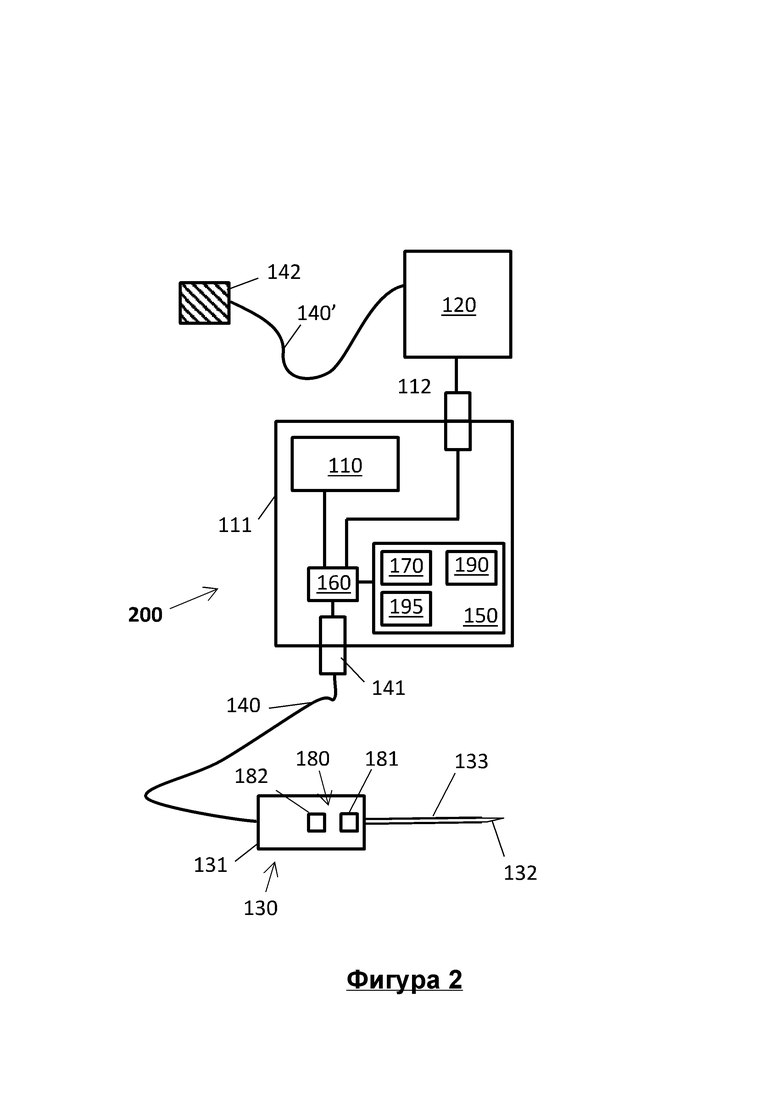
[0034] Фигура 2 - схематичное изображение хирургической системы согласно одному варианту осуществления настоящего изобретения;
[0035] Фигура 3 - графическое представление импульсной последовательности первого и второго сигналов, подаваемых на рабочую часть инструмента;
[0036] Фигура 4 - схематичное изображение принципиальной схемы хирургической системы, представленной на Фигуре 2;
[0037] Фигура 5 - схематичное изображение принципиальной схемы, иллюстрирующей замкнутый контур управления током;
[0038] Фигура 6a - схематичное изображение схемы компенсации напряжения;
[0039] Фигура 6b - графическое представление выходного напряжения на дистальном конце рабочей части инструмента как функции электрического тока.
[0040] На Фигуре 1a чертежей проиллюстрирован хирургический узел 100 согласно одному варианту осуществления настоящего изобретения для использования при проведении хирургической процедуры, например электрохирургической, ультразвуковой или лазерной хирургической процедуры. Узел 100 содержит первый генератор 110, например, высоковольтный электрический генератор, способный генерировать 1,5-20 кВ, предпочтительно 3-10 кВ. Первый генератор 110 выполнен с возможностью генерирования первого сигнала, который предпочтительно представляет собой форму сигнала напряжения постоянного тока (DC), используемого для создания электрического поля проксимально к участку проведения хирургической процедуры. В одном варианте осуществления узел 100 выполнен с возможностью приема, осуществляемого посредством соединителя 112, второго сигнала, представляющего собой выходной сигнал второго генератора 120. Соединитель 112 может располагаться на корпусе 111 первого генератора 110, при этом второй сигнал может приниматься в корпусе 111. Второй генератор 120 может содержать лазерный источник (не показан), и в этом случае второй сигнал может содержать лазерное излучение. В качестве альтернативы второй генератор 120 может содержать генератор ультразвуковых волн, и в этом случае второй сигнал может содержать ультразвуковой сигнал. В качестве дополнительной альтернативы второй генератор 120 может содержать электрический генератор для генерирования формы радиочастотного (RF) сигнала напряжения переменного тока (AC). В любом из вышеприведенных вариантов осуществления второй сигнал выполнен с возможностью рассечения, ушивания и/или каутеризации биологической ткани пациента в ходе хирургической процедуры.
[0041] Узел 100 дополнительно содержит хирургический инструмент 130, который может электрически соединяться с первым генератором 110 и вторым генератором 120 посредством кабеля 140. Кабель 140 содержит соединитель 141, расположенный на его дистальном конце, для образования соединения с первым и вторым генераторами 110, 120, в связи с чем может содержать электрический соединитель или комбинированный соединитель для образования, например, электрического и оптического соединения с соответствующими генераторами. Кабель 140 предпочтительно имеет длину по меньшей мере 3 м, так что первый и второй генераторы 110, 120 могут находиться изолированно от стерильного операционного пространства. В одном варианте осуществления соединитель 141 и кабель 140 выполнены с возможностью передачи первого сигнала и второго сигнала на инструмент 130 для использования при проведении хирургической процедуры. Однако следует понимать, что в альтернативном варианте осуществления первый и второй сигналы могут передаваться на инструмент 130 посредством отдельных кабелей и соединителей (не показано). Для дальнейшего описания изобретения будет рассмотрен только вариант осуществления, в котором второй генератор 120 содержит радиочастотный генератор.
[0042] В работе инструмент 130 удерживается хирургом (не показано) для проведения процедуры и содержит корпус 131, по меньшей мере часть которого образует рукоятку инструмента для хирурга. Инструмент 130 дополнительно содержит рабочую часть 132 инструмента, которая выполнена соединяемой с возможностью разъединения с корпусом 131 посредством зажима или зажимного приспособления (не показано). Рабочая часть 132 инструмента выполнена с возможностью приема первого и второго сигналов и образована из электропроводящего материала, например, металла, проходящего через электроизолирующую оболочку 133, в то время как корпус 131, удерживаемый хирургом, выполнен из электроизоляционного материала, например диэлектрика.
[0043] Первый сигнал выполнен с возможностью прохождения вдоль первого пути в схеме, а второй сигнал выполнен с возможностью прохождения вдоль второго пути в схеме, при этом первый и второй пути зависят от электрохирургического режима управления инструментом 130.
[0044] Например, в монополярном режиме работы, как показано на Фигурах 1a и 2 чертежей, первый сигнал выполнен с возможностью прохождения от первого электрического полюса (не показан) первого генератора 110 через тело пациента ко второму электрическому полюсу первого генератора. Второй электрический полюс электрически соединен с пациентом (не показано) посредством отдельного кабеля 140', который в схеме, проиллюстрированной на Фигуре 1a, на своем проксимальном конце соединен со вторым электрическим полюсом (не показан) второго генератора 120, а на своем дистальном конце - с адгезивной прокладкой 142 для образования физического и электрического соединения с пациентом. Второй электрический полюс первого генератора 110 электрически соединен со вторым электрическим полюсом второго генератора 120 (посредством кабеля 208' и соединителя 209, см. далее описание, связанное с Фигурой 4), в связи с чем очевидно, что первый и второй пути используют общий кабель 140' и адгезивную прокладку 142. Таким образом, первый сигнал выполнен с возможностью прохождения от первого полюса первого электрического генератора 110 вдоль кабеля 140 к рабочей части 132 инструмента, в результате чего электроны распространяются от рабочей части 132 инструмента в направлении ткани пациента, например, стенки брюшной полости пациента, благодаря тому, что пациент электрически соединен со вторым (т.е. противоположным) электрическим полюсом первого генератора 110 через кабель 140'. Электроны, а значит, и первый сигнал последовательно проходят обратно ко второму полюсу первого генератора 110 через адгезивную прокладку 142 и далее кабель 140'. Однако в одном варианте монополярного режима работы, который не показан, проксимальный конец кабеля 140' может быть соединен непосредственно со вторым полюсом первого генератора 110. В этом случае первый путь в схеме и второй путь в схеме могут содержать специальный обратный кабель 140' и специальную адгезивную прокладку 142 для образования электрического контакта с пациентом в своих соответствующих схемах.
[0045] Второй сигнал выполнен с возможностью прохождения вдоль второго пути в схеме, который опят же зависит от конкретного электрохирургического режима управления инструментом 130. Например, при монополярной конфигурации, как показано на Фигурах 1a и 2 чертежей, второй сигнал проходит между первым и вторым электрическим полюсами (не показано) второго генератора 120 вдоль пути, содержащего кабель 140, рабочую часть 132 инструмента и кабель 140', который электрически соединен с пациентом через адгезивную прокладку 142.
[0046] Однако при биполярной конфигурации (которая не показана) противоположные электрические полюсы второго генератора 120 электрически соединены с электрически изолированными участками рабочей части 132 инструмента. Например, если рабочая часть 132 инструмента содержит зажим или щипцы 134, как показано на фигуре 1f, имеющие участки противоположных щечек, электрические полюсы второго генератора 120 могут быть по отдельности электрически соединены с каждой щечкой, в связи с чем нет необходимости в электрической возвратной цепи, проходящей через прокладку 142, расположенную на пациенте. Второй сигнал выполнен с возможностью прохождения от первого полюса второго генератора 120 к одной из щечек 135a щипцов 134, а затем возврата ко второму полюсу второго генератора 120 через противоположную щечку 135b щипцов 134. Радиочастотное электрическое поле, генерируемое вторым генератором 120, таким образом, будет направлено в пределах ткани, удерживаемой между щечками 135a, 135b, для проведения требуемого рассечения, ушивания или каутеризации ткани. При данной биполярной конфигурации кабель 140' может быть электрически соединен непосредственно со вторым полюсом первого генератора 110 и тем самым образовывать только часть первого пути в схеме. В этом случае первый сигнал выполнен с возможностью прохождения от первого полюса первого генератора 110 к одной из щечек 135a, 135b щипцов 134, а затем возврата ко второму полюсу первого генератора 110 через кабель 140' и прокладку 142. Однако прохождение первого сигнала к одной из щечек 135a, 135b будет разрешено только после того как второй сигнал устранен с обеих щечек 135a, 135b и проведено отсоединение от второго генератора, чтобы предотвратить разряд первого сигнала между щечками. Точно так же, распространяя этот подход на биполярные конфигурации, при многополярных конфигурациях необходимо устранить второй сигнал с каждого полюса и отсоединить второй генератор 120 от каждого полюса, прежде чем приложить первый сигнал к одному из полюсов.
[0047] Узел 100 дополнительно содержит контроллер 150 для управления подачи первого и второго электрических сигналов на рабочую часть 132 инструмента. Контроллер 150 может располагаться, например, в корпусе 131 инструмента или, в качестве альтернативы, в корпусе 111 первого генератора 110. Контроллер 150 соединен с возможностью связи с коммутационным узлом 160 и выполнен с возможностью управления коммутационным состоянием узла 160 для переключения подачи первого и второго электрических сигналов на рабочую часть 132 инструмента. Коммутационный узел 160 содержит множество реле (R1-R6 - см. Фигуру 4 чертежей), которые размыкаются и замыкаются управляющей цепью реле (не показано) в ответ на сигналы управления, поступающие от контроллера 150, причем чтобы избежать какого-либо взаимного влияния между первым и вторым сигналами, а также сигналами управления, между ними предусмотрено эффективное электрическое экранирование.
[0048] В одном варианте осуществления, в особенности пригодном для случая, когда второй сигнал содержит сигнал ультразвукового или оптического излучения, контроллер содержит схему 170 обнаружения для опознавания второго сигнала. Такая схема обнаружения может быть реализована во множестве форм, в то числе, но не ограничиваясь перечисленным, средневолновой антенны, соединенной с диодным детектором для определения огибающей пикового возмущения электромагнитного поля, вызванного присутствием второго сигнала, комбинации преобразователя напряжения или тока с фракционной дискретизацией второго сигнала, либо с помощью входных данных состояния от контроллера (не показано) второго генератора 120, указывающих на то, что второй сигнал выше или ниже порога амплитуды, которые передаются на схему 170 обнаружения. Схема 170 обнаружения выполнена с возможностью выдачи сигнала обнаружения на контроллер 150 в зависимости от распознанного второго сигнала, чтобы позволить контроллеру 150 управлять подачей первого электрического сигнала на рабочую часть 132 инструмента посредством коммутационного узла 160. Контроллер 150 выполнен с возможностью подачи первого электрического сигнала на рабочую часть 132 инструмента в течение первого временного интервала, а также второго электрического сигнала на рабочую часть инструмента в течение второго временного интервала, который является отдельным и не перекрывается с первым временным интервалом. В этом смысле схема 170 обнаружения действует в качестве предохранительного устройства, чтобы не допустить одновременной подачи первого и второго сигналов. Первый интервал соответствует интервалу, в течение которого второй сигнал ниже второго порогового значения, а второй интервал соответствует интервалу, в течение которого первый сигнал ниже первого порогового значения. Первое и второе пороговые значения соответствуют значениям сигнала, ниже которых первый и второй сигналы не способны обеспечить выполнение своей хирургической функции по устранению частиц, а также рассечению, ушиванию или каутеризации соответственно. Однако в вариантах осуществления, в которых второй сигнал содержит лазерное излучение или ультразвуковой сигнал, предполагается, что первый и второй сигналы могут подаваться на рабочую часть инструмента одновременно.
[0049] В одном варианте осуществления узел 100 дополнительно содержит по меньшей мере один исполнительный механизм 180, управляемый пользователем. Контроллер 150 выполнен с возможностью управления подачей первого и второго сигналов, подаваемых на рабочую часть инструмента, в ответ на рабочее состояние исполнительного механизма 180, в связи с чем рабочее состояние исполнительного механизма 180 частично определяет выдачу контроллером 150 сигналов управления на управляющую цепь реле.
[0050] Исполнительный механизм 180 может содержать кнопку 181, чтобы позволить хирургу инициировать автоматическое переключение подачи первого и второго сигналов, подаваемых на рабочую часть 132 инструмента. Кнопка 181 может устанавливаться на корпусе инструмента или представлять собой кнопку с ножным приводом, либо в случае роботизированной хирургии располагаться удаленно от участка хирургического вмешательства. Предполагается, что нажатие кнопки 181 приведет к прохождению второго сигнала к рабочей части 132 инструмента для проведения хирургической процедуры, при этом при отпускании кнопки 181 второй сигнал устраняется с рабочей части 132 инструмента. Освобождение кнопки 181 приводит к подаче первого сигнала на рабочую часть инструмента для очистки от дыма.
[0051] В дополнительном варианте осуществления узел 100 может содержать или дополнительно содержит исполнительный механизм 182 блокирования, например, кнопку на корпусе рабочей части 132 инструмента, чтобы позволить хирургу активировать первый сигнал на требуемый отрезок времени, после того как второй сигнал устранен с рабочей части инструмента. Например, после отпускания кнопки 181 второй сигнал будет устранен с рабочей части инструмента, после чего первый сигнал будет приложен на заданный отрезок времени. Однако исполнительный механизм 182 блокирования приспособлен для предоставления хирургу возможности продолжить подачу первого сигнала на рабочую часть 132 инструмента. Подача первого сигнала на рабочую часть 132 инструмента исполнительным механизмом 182 блокирования может продолжаться, пока кнопка 182 нажата, и/или продолжаться на заданный отрезок времени после разблокирования исполнительного механизма 182. Предполагается, что данное средство будет полезным для хирургов, которые желают устранить большие скопления взвешенных частиц, в том числе, например, хирургический дым, не прибегая к необходимости поддержания работы исполнительного механизма 182 в течение всего процесса очистки. Такой временной интервал при необходимости может воспроизводиться хирургом путем повторного срабатывания исполнительного механизма 182. удал
[0052] Однако для обеспечения безопасной работы узла 100, а именно безопасной подачи первого и второго сигналов, контроллер 150 дополнительно содержит схему 190 синхронизации, предназначенную для синхронизации подачи первого сигнала на рабочую часть 132 инструмента после освобождения кнопки 181. Схема 190 синхронизации выполнена с возможностью приема сообщения об устранении второго сигнала с рабочей части инструмента, а также выполнена с возможностью определения времени подачи первого сигнала в течение первого временного интервала, например 5 с, после заданной задержки вслед за устранением второго сигнала с рабочей части 132 инструмента.
[0053] В дополнительном варианте осуществления узел 100 дополнительно содержит по меньшей мере один датчик (не показан), соединенный с возможностью связи с контроллером 150, предназначенный для распознавания наличия частиц, порожденных хирургическим вмешательством, причем этот по меньшей мере один датчик выполнен с возможностью выдачи сигнала на контроллер 150, характеризующего количество частиц, окружающих участок хирургического вмешательства. В данном варианте осуществления контроллер 150 выполнен с возможностью отложить, а в случае необходимости, заблокировать выполнение команды подачи второго сигнала на рабочую часть 132 инструмента, а значит, сохранить/инициировать подачу первого сигнала на рабочую часть 132 инструмента на период/интервал задержки, пока количество частиц, порожденных хирургическим вмешательством, не уменьшится до заданного порогового значения.
[0054] Схема 190 синхронизации и контроллер 150, таким образом, выполнены с возможностью управления коммутационным узлом 160 для задержки подачи первого сигнала на рабочую часть 132 инструмента, осуществляемой после подачи второго сигнала, на 10 мс-100 мс. Например, на фигуре 3 чертежей проиллюстрирована импульсная последовательность автоматического переключения подачи первого сигнала. После подачи второго сигнала в течение второго интервала времени, определяемого хирургом, например, в ходе проведения процедуры по рассечению ткани, контур, содержащий второй генератор 120, имеет возможность разрядиться в течение третьего временного интервала, составляющего приблизительно 10 мс-100 мс, прежде чем подается первый сигнал в течение первого временного интервала, составляющего приблизительно 3 с, для удаления частиц. Точно так же дополнительная задержка, а именно дополнительный третий интервал, составляющий 10 мс-100 мс, используется для того, чтобы позволить контуру, содержащему первый генератор 110, разрядиться перед последующей очередной подачей второго сигнала. Такая задержка инициирования первого и второго интервалов может предотвратить преждевременную коммутацию рабочей части 132 инструмента между вторым сигналом и первым сигналом, где огибающая второго сигнала неизбежно носит прерывистый характер, путем обеспечения возможности разрядки/рассеивания остаточного заряда первого или второго сигнала (см. далее описание, связанное с Фигурой 4). Известно, например, что лазерные процедуры, предназначенные для рассечения, ушивания или каутеризации ткани, могут применяться с существенными перерывами, где интервалы, на которых второй сигнал ниже порога амплитуды, отделены интервалами, на которых второй сигнал выше порога амплитуды. Такие способы также предусмотрены в электрохирургических генераторах и обычно применяются, чтобы уменьшить побочный эффект, вызванный термической диффузией через ткань на участке хирургического вмешательства.
[0055] В дополнительном варианте осуществления контроллер 150 дополнительно содержит датчик 195 приближения для определения расстояния дистального конца рабочей части 132 инструмента от токопроводящего пути, например, ткани пациента. Датчик приближения содержит устройство контроля напряжения (не показано), предназначенное для контроля напряжения на дистальном конце рабочей части 132 инструмента. В случае если дистальный конец рабочей части 132 инструмента располагается слишком близко к стенке брюшной полости (не показано), например, в брюшной полости пациента, напряжение упадет ниже порогового значения вследствие снижения импеданса между рабочей частью 132 инструмента и тканью пациента. Данное пониженное напряжение будет слишком низким, чтобы создать между ними подходящую разность потенциалов для ионизации частиц и дыма, порожденных хирургическим вмешательством. Кроме того, в случае если дистальный конец рабочей части 132 инструмента находится слишком близко к ткани пациента, это может привести к короткому замыканию через тело пациента при подаче первого сигнала. Таким образом, датчик 195 приближения выполнен с возможностью предотвращения/остановки подачи первого сигнала, в случае если дистальный конец рабочей части 132 инструмента располагается или приближается слишком близко к ткани пациента.
[0056] Рабочая часть 132 инструмента может иметь прямолинейную форму копья (как показано на фигуре 1a чертежей) с заостренным дистальным концом 131. Заостренный конец действует в качестве центра генерирования ионов и способствует высвобождению из него электронов при содействии второму сигналу, а значит ионизации частиц, находящихся во взвешенном состоянии в атмосфере вблизи участка хирургического вмешательства. В альтернативных вариантах осуществления, однако, как показано на Фигурах 1b, 1c, 1d чертежей, рабочая часть инструмента может иметь конфигурацию лезвия, L- или J-образную форму и также содержит заостренный дистальный конец. В еще одном варианте осуществления, как показано на фигуре 1e чертежей, рабочая часть инструмента может содержать или дополнительно содержит, например, множество заостренных зубцов, проходящих вдоль участка длины рабочей части инструмента. В дополнительном варианте осуществления, как показано на фигуре 1f чертежей, рабочая часть инструмента может содержать противоположные щечки 135a, 135b щипцов 134, при этом одна или обе щечки 135a, 135b содержат острые края или зубцы 136, которые действуют в качестве центров генерировании ионов, а значит точно так же способствуют ионизации частиц, находящихся рядом во взвешенном состоянии.
[0057] В работе хирургический узел 100 электрически соединяется со вторым электрическим генератором 120 посредством разъема 112 на первом электрическом генераторе 110, чтобы образовать хирургическую систему 200, один вариант осуществления которой проиллюстрирован на Фигуре 2 чертежей. Затем на пациенте закрепляется адгезивная прокладка 142, например, на ноге пациента (не показано), при этом для монополярного режима работы прокладка 142 электрически соединяется со вторым полюсом второго генератора 120 посредством кабеля 140'. Однако, как отмечено выше, в данной конфигурации вторые полюсы первого и второго генераторов могут совместно использовать обратный кабель 140', в связи с чем второй полюс первого генератора 110 также электрически соединяется с прокладкой 142. Чтобы улучшить электрическое соединение с пациентом, между прокладкой 142 и ногой пациента (не показано) может наноситься электропроводящий гель (не показан).
[0058] После этого хирургический инструмент 130 электрически соединяется с первым генератором 110 посредством кабеля 140 и соответствующего соединителя 141, а рабочая часть 132 инструмента закрепляется в инструменте 130, например, посредством зажимного приспособления (не показано). Рабочая часть 132 инструмента образует электрическое соединение с кабелем 140, при этом дистальный конец рабочей части 132 инструмента обнажен с электрической точки зрения, а именно выступает из оболочки 133, для проведения электрохирургической процедуры. Когда рабочая часть 132 инструмента закреплена на месте, первый и второй генераторы 110, 120 приводятся в действие посредством переключателя питания (не показан).
[0059] На Фигуре 4 чертежей представлено схематичное изображение принципиальной схемы хирургической системы 200, приспособленной для проведения хирургической операции в монополярном режиме. Система выполнена с возможностью получения электропитания от сети переменного тока через входные клеммы 202, при этом переменный ток сети преобразуется в постоянный ток с помощью схемы выпрямления (не показано), связанной с первым генератором 110. Высокое входное напряжение от первого генератора 110 подается на ручной блок 130 по цепи 140a в кабеле 140. Цепь 140a содержит реле R1, образующее часть коммутационного устройства 160, при этом подача первого сигнала к рабочей части 132 инструмента зависит от коммутационного состояния данного реле R1.
[0060] Как показано на Фигуре 5 чертежей, первый генератор 110 содержит аналоговый замкнутый контур 300 для управления с обратной связью выходным током. Рабочий ток зависит от расстояния, на котором дистальный конец рабочей части 132 инструмента располагается от ткани пациента. По мере приближения рабочей части 132 инструмента к ткани пациента импеданс снижается. Это приводит к увеличению тока и падению выходного напряжения. Первый генератор 110, однако, контролирует ток, проходящий между рабочей частью 132 инструмента и тканью пациента, и отключает ток, когда он приближается к верхнему предельному значению тока, например, 10 мкА, которое обычно является максимальным значением постоянного тока, который может безопасным образом прикладываться к пациенту.
[0061] Контур 300 управления главным образом регулирует выходной ток первого генератора 110. Первый генератор 110 содержит последовательно включенное сопротивление 114 величиной 200 МОм на своем выходе, чтобы гарантировать, что максимальный ток составит 50 мкА в условиях однократного короткого замыкания в схеме, т.е. если ограничение тока не срабатывает и первый генератор 110 выдает максимальные 10 кВ. Сопротивление реализуется в виде двух отдельных резисторов 114a, 114b с величиной сопротивления 100 МОм, каждый из которых отдельно соединен последовательно с выходными клеммами высокого напряжения и низкого напряжения первого генератора 110. Электрический ток возвращается к первому генератору 110 через резистор 114b, тем самым вырабатывая напряжение, которое буферизуется и используется в качестве регулируемой величины. Данная величина сравнивается с заданным значением тока с помощью компаратора 302, и итоговая ошибка интегрируется посредством интегратора 304, создавая сигнал управления для первого генератора 110. Если регулируемая величина выше/ниже заданного значения тока, сигнал управления, поступающий на первый генератор 110, уменьшается/увеличивается. Это уменьшает/увеличивает высокое входное напряжение и увеличивает/уменьшает измеренный ток для достижения заданного целевого значения.
[0062] Возможно насыщение сигнала ошибки, когда происходит насыщение выходного сигнала первого генератора приблизительно при 10 кВ, что ограничивает возможности получения требуемого тока. Замкнутый контур 300 выполнен с возможностью насыщения на переменном уровне, что позволяет регулировать выходное напряжение насыщения ниже 10 кВ всегда, когда регулируемая величина тока ниже заданного значения.
[0063] Данное выходное сопротивление 114 первого генератора 110 вызывает нежелательное падение напряжения на выходе при нормальных условиях работы, создавая зависимость между напряжением, которое можно получить на выходе, и выдаваемым током. На практике возникают проблемы, когда ток короны близок к предельному значению тока, обычно составляющему 10 мкА. Падение напряжения на последовательно включенном сопротивлении 114 снижает выходное напряжение ниже величины, необходимой для эффективного коронного разряда, а именно ионизации дымовых частиц. Показатели очистки от дыма снижаются предписанным предельным значением тока, но не потому, что недоступен достаточный ток, а потому, что имеется недостаточное напряжение.
[0064] Однако падение напряжения может компенсироваться с помощью схемы 400 компенсации напряжения, показанной на фигуре 6a, которая выполнена с возможностью обеспечения соответствующего увеличения выходного напряжения, получаемого от первого генератора 110. Это достигается путем увеличения заданного значения напряжения посредством падения напряжения на последовательно включенном сопротивлении 114b. Схема 400 содержит процессор или суммирующее устройство 402, выполненное с возможностью приема в качестве входного сигнала целевого напряжения и сигнала, характеризующего электрический ток, проходящий через резистор 114b. Этот ток уже известен в результате использования контура 300 управления с обратной связью; регулируемая величина контура 300 управления характеризует ток, проходящий через последовательно включенное сопротивление 114. Таким образом, добавив пропорциональную долю сигнала тока к заданному значению, можно достичь требуемой компенсации напряжения. Управление системой 200 с помощью данной схемы 400 приводит к почти плоской кривой нагрузки, при которой напряжение остается в пределах 5% от требуемого напряжения, составляющего 10 кВ (как показано на фигуре 6b чертежей), вплоть до достижения предельного значения тока. Это гарантирует, что эффективность ионизации более не будет снижаться с увеличением тока при условии, первый генератор 110 не достиг точки насыщения напряжения.
[0065] Как опять же показано на Фигуре 4 чертежей, второй генератор 120 аналогичным образом выполнен с возможностью получения электропитания от сети переменного тока через входные клеммы 204 и генерирования второго сигнала, который поступает на выход через интерфейс 206. Второй сигнал передается на ручной блок 130, а значит рабочую часть 132 инструмента, посредством кабеля 208 и соединителя 112. Кабель 208 содержит цепь 208a, имеющую расположенное в ней реле R2, а также цепь 208b, имеющую расположенное в ней реле R3. Кабель 208 имеет длину, которая сведена к минимуму, чтобы уменьшить емкостное сопротивление между цепью пациента и окружающей средой, а также уменьшить емкостное сопротивление между полюсами на выходе второго генератора. Это приводит к уменьшению радиочастотных токов утечки (а значит, снижает риск получения ожогов хирургом или пациентом), а также уменьшает риск образования низкочастотного тока утечки (электрической сети), который создает опасность поражения пациента электрическим током. В некоторых системах радиочастотные токи смещения/емкостные токи, которые увеличиваются с увеличением длины кабелей, используемых для проведения процедур, являются существенными по сравнению с токами, связанными с хирургическим вмешательством (плазмы хирургического назначения часто имеют высокий импеданс), что приводит к затуханию колебательного сигнала, заданного для проведения процедуры.
[0066] Схема системы дополнительно содержит первый и второй электрические пути 210, 212, соединенные по обеим сторонам реле R2 и проходящие к обратной или заземляющей цепи 214. Путь 214 проходит к клемме 211 на корпусе 111. Второй полюс или возвратный контур второго генератора 120 электрически соединен с этой цепью 214 посредством кабеля 208'. Кабель 208' содержит соединитель 209, расположенный на его дистальном конце, для электрического соединения с клеммой 211. Первый путь 210 электрически подсоединен на стороне высокого напряжения реле R2 и содержит расположенный на нем последовательно соединенный разряжающий резистор 216 (величина сопротивления которого лежит в диапазоне 1 МОм - 300 МОм, предпочтительно 50 МОм - 200 МОм). Разряжающий резистор способствует диссипации или разряду остаточного заряда, образованного при прикладывании первого сигнала. Сопротивление разряжающего резистора 216 подбирается так, чтобы соответствующим образом ослабить остаточную часть первого сигнала, возникающую на выходе второго генератора 120, когда первый сигнал предпочтительно ограничен величиной 10 мкА. Разряжающий резистор 216 представляет собой тривиальную добавку к нагрузке на пути второго сигнала, в связи с чем существенно не влияет на второй сигнал. Второй путь 212 электрически подсоединен на стороне низкого напряжения реле R2 и содержит последовательно соединенное реле R6 и разрядный резистор 218.
[0067] Схема дополнительно содержит реле R5 (которое также образует часть коммутационного устройства 160, хотя расположено в инструменте 130), расположенное в инструменте 130, которое вручную активируется хирургом, например, посредством кнопки 181. Реле R5 расположено в электрической цепи 140b, проходящей в кабеле 140 к контроллеру 150 для передачи команд хирурга. Цепь 140b дополнительно содержит элемент для электрического разъединения цепи, например, конденсатор 220, чтобы не допустить протекания постоянного тока к контроллеру 150.
[0068] Как показано на Фигуре 4, схема дополнительно содержит отдельный электрический путь 222, электрически соединенный с цепью 140a и проходящий к порту 224, расположенному на корпусе 111. Путь 222 дополнительно содержит последовательно соединенное реле R4, которым может управлять контроллер 150 для передачи первого сигнала на порт 224, если требуется электрически соединить дополнительный электрод (не показан) с первым генератором 110 для очистки от дыма.
[0069] В процессе приведения в исходное состояние реле R1 и R6 коммутационного устройства 160 находятся в замкнутом состоянии, а все остальные реле (R2-R5) коммутационного устройства 160 находятся в разомкнутом состоянии, так что любой остаточный заряд на выходе первого генератора 110 может быстро разрядиться или рассеяться на разрядном резисторе 218 в течение 10 мс-100 мс. Вслед за этим приведением в исходное состояние реле R1 и R6 переходят в разомкнутое состояние, а реле R2 переходит в замкнутое состояние, чтобы привести второй генератор 120 в состояние готовности к проведению хирургической процедуры. В течение этого периода ожидания всякая утечка тока предпочтительно происходит на разряжающем резисторе 216, тем самым минимизируя утечку тока на других реле, а именно R1, R3-R6.
[0070] Когда хирург дает команду на подачу второго сигнала на рабочую часть 132 инструмента путем активации кнопки 181, реле R5 переходит в замкнутое состояние, тем самым давая команду контроллеру 150 замкнуть реле R3 (в течение второго интервала времени, определяемого продолжительностью времени нажатия хирургом на кнопку 181). В течение этого второго временного интервала хирург может манипулировать инструментом 130 для проведения хирургической процедуры. После отпускания кнопки 181 реле R5 переходят в разомкнутое состояние, что приводит к размыканию реле R3, не позволяющему второму сигналу проходить к рабочей части 132 инструмента. Затем реле R2 переходят в разомкнутое состояние, чтобы отсоединить второй генератор 120 от инструмента 130. После третьего временного интервала реле R1 переводится в замкнутое состояние контроллером 150, чтобы подать первый сигнал на рабочую часть инструмента для очистки от дыма (в течение первого временного интервала). Подача первого сигнала на рабочую часть 132 инструмента приводит к испусканию электронов с дистального конца рабочей части 132 инструмента и любых других центров генерирования ионов, при этом электроны прикрепляются к взвешенным частицам, тем самым ионизируя частицы. Электрическое поле, генерируемое между рабочей частью 132 инструмента и телом пациента благодаря DC-сигналу, далее заставляет ионизированные частицы прикрепляться к телу пациента, а значит удаляться с участка хирургического вмешательства, чтобы улучшить его обзор для хирурга.
[0071] Система выполнена с возможностью повторного перехода в исходное состояние после первого временного интервала. В ходе этого процесса реле R6 переходит в замкнутое состояние совместно с реле R1, в то время как все остальные реле находятся в разомкнутом состоянии, так что любой остаточный заряд на выходе первого генератора 110 может быстро разрядиться или рассеяться на разрядном резисторе 218 в течение 10 мс-100 мс.
[0072] В случае проведения хирургической операции в биполярном режиме или когда второй сигнал содержит ультразвуковой сигнал, разряжающие резисторы 216 должны располагаться между полюсами выхода второго генератора 120, а в дополнительном альтернативном варианте осуществления такие резисторы должны располагаться между каждым полюсом выхода второго генератора и возвратной прокладкой 142 пациента или защитным заземляющим проводником. В этом дополнительном варианте осуществления дополнительные резисторы, соединенные с защитным заземлением, должны иметь величины сопротивления по меньшей мере 50 МОм, чтобы не нарушить «плавающий статус» контура пациента, который содержит электрические компоненты, соединенные с пациентом.
[0073] Когда остаточный заряд от подачи первого сигнала устранен, реле R1 и R6 переходят в разомкнутое состояние, а реле R2 замыкается, чтобы перевести второй генератор 120 снова в состояние ожидания, в котором он готов к получению дальнейшей команды на второй сигнал от хирурга.
[0074] Из вышесказанного очевидно, что узел 100 и система 200 позволяют хирургу рассекать ткань пациента с помощью рабочей части 132 инструмента, а также удалять частицы, образованные в результате процедуры рассечения, с помощью той же рабочей части 132 инструмента. Узел 100 и система 200, таким образом, позволяют создать более компактный и функциональный хирургический инструмент, который уменьшает получение хирургических травм и обладает более высокими эксплуатационными характеристиками.




Группа изобретений относится к медицине, а именно к хирургическому узлу, хирургической системе, выполненным с возможностью удаления частиц, находящихся во взвешенном состоянии на участке хирургического вмешательства в ходе хирургической процедуры, способу подачи сигналов на хирургический инструмент, схеме компенсации напряжения постоянного тока для изменения выходного напряжения генератора постоянного тока, подаваемого на рабочую часть хирургического инструмента. Хирургический узел выполнен с возможностью удаления частиц, находящихся во взвешенном состоянии на участке хирургического вмешательства в ходе хирургической процедуры. Узел содержит коммутационный узел, хирургический инструмент, контроллер. Коммутационный узел выполнен с возможностью приема первого сигнала и второго сигнала. Первый сигнал предназначен для использования при генерировании электрического поля проксимально к участку проведения хирургической процедуры для удаления частиц, находящихся во взвешенном состоянии проксимально к участку хирургического вмешательства. Второй сигнал предназначен для использования при рассечении, ушивании или каутеризации ткани пациента в ходе хирургической процедуры. Хирургический инструмент содержит рабочую часть инструмента. Коммутационный узел выполнен с возможностью переключения подачи первого сигнала и второго сигнала на рабочую часть инструмента. Контроллер предназначен для управления коммутационным узлом для управления подачей первого сигнала на рабочую часть инструмента в течение первого временного интервала и подачей второго сигнала на рабочую часть инструмента в течение второго временного интервала. Контроллер содержит схему синхронизации. Схема синхронизации выполнена с возможностью определения времени подачи первого сигнала на рабочую часть инструмента после второго интервала таким образом, что первый и второй интервалы представляют собой неперекрывающиеся интервалы. При этом схема синхронизации выполнена с возможностью синхронизации подачи первого сигнала в зависимости от прекращения действия второго сигнала. Хирургическая система содержит хирургический узел, первый генератор и второй генератор. Первый генератор предназначен для генерирования первого сигнала. Второй генератор предназначен для генерирования второго сигнала. При исполнении способа подают первый сигнал в течение первого временного интервала и подачу второго сигнала на рабочую часть инструмента в течение второго временного интервала. Синхронизируют подачу первого сигнала на рабочую часть инструмента после второго интервала таким образом, что первый и второй интервалы представляют собой неперекрывающиеся интервалы. Схема компенсации напряжения постоянного тока для изменения выходного напряжения генератора постоянного тока, подаваемого на рабочую часть хирургического инструмента, предназначена для поддержания постоянной разности потенциалов между дистальным концом рабочей части инструмента и тканью пациента вне зависимости от расстояния между рабочей частью инструмента и тканью пациента. Схема содержит резисторную схему, процессор. Резисторная схема выполнена с возможностью электрического соединения с выходом генератора постоянного тока. Процессор выполнен с возможностью приема в качестве входного сигнала целевого напряжения и сигнала, характеризующего электрический ток, проходящий через резисторную схему. При этом процессор выполнен с возможностью обработки этого сигнала и увеличения выходного напряжения, поступающего с электрохирургического генератора, на величину, соответствующую падению напряжения на резисторной схеме. За счет того, что подают сигнал воздействия на ткань и сигнал для удаления частиц, находящихся во взвешенном состоянии на участке хирургического вмешательства, на рабочую часть инструмента таким образом, что интервалы подачи сигналов представляют собой неперекрывающиеся интервалы, и синхронизации подачи первого сигнала в зависимости от прекращения действия второго сигнала, обеспечивается предотвращение преждевременной коммутации инструмента между первым и вторым сигналом, при том, что огибающая второго сигнала имеет прерывистый характер, путем обеспечения разрядки или рассеянья остаточного заряда второго сигнала, при этом инструмент не подвергает ткани разрушающему воздействию высокого уровня тока во время режима очистки от дыма, что обеспечивает защиту от непреднамеренного термического повреждения ткани. 4 н. и 10 з.п. ф-лы, 6 ил.
1. Хирургический узел, выполненный с возможностью удаления частиц, находящихся во взвешенном состоянии на участке хирургического вмешательства в ходе хирургической процедуры, содержащий:
- коммутационный узел, выполненный с возможностью приема первого сигнала для использования при генерировании электрического поля проксимально к участку проведения хирургической процедуры для удаления частиц, находящихся во взвешенном состоянии проксимально к участку хирургического вмешательства, а также второго сигнала для использования при рассечении, ушивании или каутеризации ткани пациента в ходе хирургической процедуры, при этом:
узел дополнительно содержит хирургический инструмент, содержащий рабочую часть инструмента, а
коммутационный узел выполнен с возможностью переключения подачи первого сигнала и второго сигнала на рабочую часть инструмента, а также
- контроллер для управления коммутационным узлом для управления подачей первого сигнала на рабочую часть инструмента в течение первого временного интервала и подачей второго сигнала на рабочую часть инструмента в течение второго временного интервала,
при этом контроллер содержит схему синхронизации, выполненную с возможностью определения времени подачи первого сигнала на рабочую часть инструмента после второго интервала таким образом, что первый и второй интервалы представляют собой неперекрывающиеся интервалы,
при этом схема синхронизации выполнена с возможностью синхронизации подачи первого сигнала в зависимости от прекращения действия второго сигнала.
2. Хирургический узел по п. 1, в котором первый и второй сигналы отделены третьим интервалом, в течение которого первый и второй сигналы устраняются с рабочей части инструмента.
3. Хирургический узел по любому предшествующему пункту, дополнительно содержащий схему обнаружения для опознавания второго сигнала, при этом схема обнаружения выполнена с возможностью выдачи сигнала обнаружения на контроллер в зависимости от обнаруженного второго сигнала.
4. Хирургический узел по любому предшествующему пункту, в котором контроллер содержит исполнительный механизм блокирования для подачи первого сигнала на рабочую часть инструмента.
5. Хирургический узел по п. 2, в котором остаточный емкостный заряд, накопленный на протяжении предшествующего первого или второго интервала, имеет возможность разрядиться или рассеяться в течение третьего интервала.
6. Хирургический узел по любому предшествующему пункту, в котором коммутационный узел содержит по меньшей мере одно реле для переключения подачи первого и второго сигналов, подаваемых на рабочую часть инструмента.
7. Хирургический узел по п. 5, дополнительно содержащий по меньшей мере один резистор для обеспечения возможности разряжения или рассеивания остаточного заряда.
8. Хирургический узел по любому предшествующему пункту, дополнительно содержащий схему компенсации напряжения для поддержания постоянной разности потенциалов между дистальным концом рабочей части инструмента и тканью пациента вне зависимости от расстояния между рабочей частью инструмента и тканью пациента.
9. Хирургический узел по п. 8, в котором схема компенсации напряжения содержит резисторную схему, которая выполнена с возможностью электрического соединения с выходом первого генератора, а также процессор, выполненный с возможностью приема в качестве входного сигнала целевого напряжения и сигнала, характеризующего электрический ток, проходящий через резисторную схему,
при этом процессор выполнен с возможностью обработки этого сигнала и увеличения выходного напряжения первого генератора на величину, соответствующую падению напряжения на резисторной схеме.
10. Хирургический узел по любому предшествующему пункту, дополнительно содержащий аналоговый замкнутый контур для управления с обратной связью током на выходе первого генератора.
11. Хирургический узел по п. 10, в котором аналоговый замкнутый контур выполнен с возможностью ограничения тока, поступающего от первого генератора, до максимального значения 100 мкА.
12. Хирургическая система, выполненная с возможностью удаления частиц, находящихся во взвешенном состоянии на участке хирургического вмешательства в ходе хирургической процедуры, содержащая хирургический узел по любому предшествующему пункту, первый генератор для генерирования первого сигнала для использования при генерировании электрического поля проксимально к участку проведения хирургической процедуры для удаления частиц, находящихся во взвешенном состоянии проксимально к участку хирургического вмешательства, а также второй генератор для генерирования второго сигнала для использования при рассечении или каутеризации ткани пациента в ходе хирургической процедуры.
13. Способ подачи первого сигнала и второго сигнала на рабочую часть инструмента, выполненного с возможностью удаления частиц, находящихся во взвешенном состоянии на участке хирургического вмешательства в ходе хирургической процедуры, при этом:
первый сигнал предназначен для использования при генерировании электрического поля проксимально к участку проведения хирургической процедуры для удаления частиц, находящихся во взвешенном состоянии проксимально к участку хирургического вмешательства, а
второй сигнал предназначен для использования при рассечении, ушивании или каутеризации ткани пациента в ходе хирургической процедуры, при этом способ включает:
- подачу первого сигнала на рабочую часть инструмента в течение первого временного интервала и подачу второго сигнала на рабочую часть инструмента в течение второго временного интервала, а также включает
- синхронизацию подачи первого сигнала на рабочую часть инструмента после второго интервала таким образом, что первый и второй интервалы представляют собой неперекрывающиеся интервалы.
14. Схема компенсации напряжения постоянного тока для изменения выходного напряжения генератора постоянного тока, подаваемого на рабочую часть хирургического инструмента, выполненного с возможностью удаления частиц, находящихся во взвешенном состоянии на участке хирургического вмешательства в ходе хирургической процедуры, для поддержания постоянной разности потенциалов между дистальным концом рабочей части инструмента и тканью пациента вне зависимости от расстояния между рабочей частью инструмента и тканью пациента,
при этом схема содержит резисторную схему, которая выполнена с возможностью электрического соединения с выходом генератора постоянного тока, а также процессор, выполненный с возможностью приема в качестве входного сигнала целевого напряжения и сигнала, характеризующего электрический ток, проходящий через резисторную схему,
при этом процессор выполнен с возможностью обработки этого сигнала и увеличения выходного напряжения, поступающего с электрохирургического генератора, на величину, соответствующую падению напряжения на резисторной схеме.
| US 2017086915 A1, 30.03.2017 | |||
| RU 2012106425 A, 27.08.2013 | |||
| US 2008287948 A1, 20.11.2008 | |||
| WO 2016024130 A1, 18.02.2016 | |||
| US 2016022350 A1, 28.01.2016. |

