Область техники, к которой относится изобретение
Заявляемое изобретение относится к области медицинского оборудования, а конкретнее к медицинской роботизированной системе для выполнения медицинских процедур, в частности хирургического вмешательства, такого как минимальное инвазивное вмешательство.
Предпосылки изобретения
Хорошо известно, что в противопоставление лапаротомии, минимальное инвазивное медицинское вмешательство имеет преимущество уменьшения количества окружающей ткани, которая поражается во время диагностического или хирургического вмешательства. Это приводит к сокращению времени выздоровления пациента, уменьшению дискомфортных и вредоносных побочных эффектов и снижению затрат на пребывание в больнице. В настоящее время в общей хирургии, урологии, гинекологии и кардиологических специальностях наблюдается увеличение количества хирургических операций, выполненных минимальным инвазивным методом, таким как лапароскопическим методом.
Минимальные инвазивные методы в целом и лапароскопии в частности устанавливают, однако, более жесткие требования для хирургов, выполняющих операцию. Хирург проводит операцию в неудобных условиях и изнурительных позах, имея ограниченное поле зрения, стесненную свободу передвижения и плохое тактильное ощущение. К данным проблемам добавляется тот факт, что хирургам часто приходится выполнять несколько последовательных вмешательств в день, где каждое продолжается, например, от 30 минут до нескольких часов. Несмотря на данные трудности, тенденция минимальных инвазивных вмешательств, вероятно, резко возрастет в ближайшие годы ввиду старения населения и давления цен в медицинской отрасли.
Очевидно, в лапароскопии от хирурга потребуется быть таким же точным в своих движениях, как в лапаротомии. Манипулирование инструментами с длинными ручками с ловкостью движений, ограниченных до четырех степеней свободы вокруг центра вращения в месте ввода инструмента, т.е. в месте вмешательства в тело пациента, не облегчает данное задание. Осложнения возникают, среди прочего, в тех случаях, когда необходимая поза является довольно утомительной и снижает уже ограниченное восприятие взаимодействующих сил между инструментом и тканью. Например, когда хирург стоит около пациента, он должен поднять и удерживать вытянутой одну из своих рук, чтобы удержать инструмент, вставленный на противоположной стороне пациента. В результате моторные способности хирурга ослабевают, как правило, через 20-30 минут, так что среди прочего возникает дрожь, потеря точности и потеря тактильной чувствительности, представляющие риск для пациента. Поэтому появляются новые технологии, такие как роботизированная лапароскопия, нацеленные на повышение эффективности, качества и безопасности операционных вмешательств.
Принимая во внимание сказанное выше, в начале девяностых годов роботизированная лапароскопия получила значительное развитие. Две типичные, серийно выпускаемые роботизированные хирургические системы - это хирургическая система, известная под торговой маркой "DA VINCI", разработанная компанией Intuitive Surgical Inc., Саннивейл, Калифорния, и хирургическая система, известная под торговой маркой "ZEUS", первоначально разработанная компанией Computer Motion Inc., Голета, Калифорния. Хирургическая система, известная под именем "DA VINCI", описана помимо других Молом и др. (Moll et al.) в патентах US 6,659,939; US 6,837,883 и других патентных документах того же самого патентообладателя. Хирургическая система, известная под именем "ZEUS", описана помимо других Вонг и др. (Wang et al.) в патентах US 6,102,850; US 5,855,583; US 5,762,458; US 5,515,478 и другой патентной литературе, переуступленной компании Computer Motion Inc., Голета, Калифорния.
Данные телеуправляемые роботизированные установки позволяют управлять хирургическим вмешательством либо напрямую из операционного зала, либо из удаленного местоположения, используя обратный визуальный контроль на панели управления. В любом случае, утомительная поза хирурга исключается.
Кроме высоких затрат на приобретение и эксплуатационных расходов данных роботизированных систем, их распространение и признание в медицинском сообществе ограничивается, среди прочего, ввиду дефицита разнообразия. Обе системы были разработаны специально для кардиологической хирургии, в которой топологическая анатомия постоянна, рабочее место мало и поэтому точность движения инструмента и манипуляционные возможности требуются только в ограниченном пространстве. Следовательно, механическая конструкция данных систем не совсем удобна для использования в других видах хирургии (включая гинекологию, урологию и общую хирургию), в которых рабочее пространство больше, чем в кардиологии, анатомическая топология варьируется (даже иногда непредсказуемо), а механические свойства ткани и органов различны.
Вне зависимости от этих двух конкретных систем, механическая разработка манипуляторов в роботизированных хирургических системах в настоящий момент допускает значительную возможность улучшения в различных аспектах, среди которых универсальность системы является одним из многих.
Задача изобретения
Исходя из этого, цель рассматриваемого изобретения заключается в разработке медицинской роботизированной системы для выполнения хирургического вмешательства, содержащей робот-манипулятор, имеющий усовершенствованную кинематическую конфигурацию.
Общее описание изобретения
Для достижения данной цели предлагается медицинская роботизированная система для выполнения хирургического вмешательства, в частности лапароскопического вмешательства, содержащая робот-манипулятор для роботизированного перемещения медицинских инструментов, в частности лапароскопического хирургического инструмента, как изложено ниже. В соответствии с одним аспектом изобретения, робот-манипулятор содержит основание, руку манипулятора, имеющую по существу вертикальную часть, поддерживаемую основанием, и по существу горизонтальную часть, поддерживаемую вертикальной частью; запястный шарнир манипулятора, поддерживаемый рукой манипулятора; и исполнительный блок, поддерживаемый запястным шарниром манипулятора и скомпонованный для удержания медицинского инструмента. В соответствии с другим аспектом изобретения, рука манипулятора имеет цилиндрическую PRP кинематическую конфигурацию для координатного перемещения запястного шарнира манипулятора. В частности, PRP кинематическая конфигурация имеет следующую последовательность сочленений: призматическое первое сочленение для изменения высоты вертикальной части путем обеспечения поступательной степени свободы вдоль по существу вертикальной оси, вращательное второе сочленение для изменения угла поворота между вертикальной частью и горизонтальной частью путем обеспечения вращательной степени свободы вокруг по существу вертикальной оси, и призматическое третье сочленение для изменения досягаемости горизонтальной части путем обеспечения поступательной степени свободы вдоль по существу горизонтальной оси.
Среди других преимуществ, описанных ниже, эта конкретная кинематическая конфигурация руки манипулятора обеспечивает:
- уменьшение пространства, необходимого над пациентом для одной руки одиночного манипулятора, которая позволяет, среди прочего, использовать увеличенное количество отдельных рук манипулятора при данном вмешательстве;
- размещение основания манипулятора на определенном расстоянии от пациента таким образом, что перемещение манипулятора робота в исходное состояние в случае опасности требует лишь поворота горизонтальной части руки в компактное положение;
- облегчение доступа персонала к пациенту, а также к месту расположения хирургических инструментов, например сменных инструментов;
- облегчение предотвращения столкновения взаимопересекающихся рук манипулятора;
- использование минимума сочленений в самой руке манипулятора, т.е. только три сочленения для обеспечения трех степеней свободы для координатного перемещения запястного шарнира, при котором любые излишние сочленения, в частности пассивные сочленения, устраняются.
Становится понятным, что возможны различные размещения осей конфигурации PRP. Указанное выше размещение осей рассматривается как наиболее удобная кинематическая конфигурация для настоящего описываемого применения. В дальнейшем становится понятным, что среди прочего в плане кинематики, требований к приводу и управлению робота, цилиндрическая PRP конфигурация робота фундаментально отличается от, например, PRR конфигурации, как, например, описано в патенте US 5'351'676, или RPP конфигурации, как описано в патенте US 6'120'433.
Далее, специалист понимает, что предложенная здесь кинематическая конфигурация критически оценивает укоренившуюся веру в то, что SCARA, т.е. определенный тип PRP конфигурации, рассматривается как наиболее подходящий тип для лапароскопического применения. Данная давно устоявшаяся вера подтверждена в патентах и научной литературе, например, «Аналитическое исследование роботов "Оптимальная разработка позиционирующих стендов для лапароскопии" ("A Robotic Case Study: Optimal Design For Laparoscopic") А.Фараз и Ш. Паянде (A. Faraz and Sh. Payandeh); Доклады на сетевой конференции 1997 IEEE по робототехнике и автоматизации, апрель 1997 г.(в частности, см. параграф 2.2) (Proceedings of the 1997 IEEE Int. Conf. On Robotics and Automation; April 1997 (see paragraph 2.2 in particular).
Более того, предлагаемая кинематическая конфигурации содействует увеличенному разнообразию систем. Другими словами, данная разработка робота-манипулятора представляет систему пригодной для множества применений, особенно для минимальной инвазивной хирургии, а также для ортопедических и биопсических вмешательств, для подкожной терапии, для забора кожного трансплантата, для ультразвуковой диагностики и т.п.
Как должно быть понятно, описанная роботизированная система порывает отношения с системой воззрений, согласно которой кинематическая конфигурация SCARA представляет собой наиболее подходящий выбор в конкретном случае роботизированной хирургической системы. Типичным примером медицинской роботизированной системы, использующей манипуляторы с конфигурацией SCARA, является вышеупомянутая система, известная под торговой маркой "ZEUS", описанная, например, в патентах US 6,102,850; US 5,855,583; US 5,762,458 и US 5,515,478.
Что касается разнообразия медицинской роботизированной системы, то существующие системы, как правило, разработаны для специфического типа хирургического вмешательства. Системы "DA VINCI" и "ZEUS", например, были разработаны специально для кардиологической хирургии. Поэтому, как упоминалось выше, данные системы разрабатывают для специальных шарнирных инструментов. Более того, из-за ограниченного рабочего пространства при кардиологических хирургических вмешательствах передвижение инструмента, как правило, укорочено от команд хирурга на тактильном интерфейсе в данных системах. В общей лапароскопической хирургии (включая гинекологию, урологию и общую хирургию) рабочее пространство больше, чем в кардиологии, анатомическая топология варьируется (даже иногда непредсказуемо) и механические свойства ткани и органов различны. Большее рабочее пространство влечет за собой больший диапазон перемещения инструмента и требует отношение фактического движения к интерфейсному в виде 1:1. В результате, в общей лапароскопии необходима увеличенная динамика движений для того, чтобы точно следовать движению руки хирурга. Из экспериментальных попыток было выявлено, что рука хирурга имеет высокую скорость в маленьком рабочем пространстве и поэтому очень большое ускорение. Скорость может достигать 100°/с вдоль угла поворота по поперечной и горизонтальной осям и 200 мм/с в направлении проникновения. При отношении движения 1:1 и в упомянутых условиях система подвержена вибрации, колебаниям и потере точности. Манипулятор робота, описанный более подробно ниже, разработан для уменьшения таких проблем и, следовательно, более удобен для многообразия вмешательств общей лапароскопической хирургии.
Более того, многие существующие системы имеют на сегодняшний день кроме манипулятора для эндоскопа только два манипулятора для хирургических инструментов. Это влечет за собой увеличение времени хирургического вмешательства из-за частой и сложной процедуры замены инструмента. При типичном вмешательстве хирург использует от пяти до семи различных типов инструментов и часто требует их замены до нескольких десятков раз. Обычно замена инструмента требует от 5 до 10 секунд в зависимости от квалификации ассистента хирурга, и эти замены составляют значительное время в общей продолжительности операции (до приблизительно 10-20%). Многие существующие роботизированные системы не совсем удобны для типичных хирургических вмешательств, требующих три или четыре входных отверстия для вставления инструмента. Другие системы ограничены до диагностических вмешательств, которые, как правило, короче по продолжительности (около 20 минут) и часто не оправдывают стоимость роботизированной системы. В идеале, роботизированная хирургическая система должна быть модульной и иметь способность справляться с до 4-мя входными отверстиями для вставления инструмента и одним входным отверстием для эндоскопа. Значительным ограничением, касающимся конструкции подходящих манипуляторов, является то, что некоторые входные отверстия могут быть удалены друг от друга только на несколько сантиметров, а соответствующие инструменты могут потребовать размещения, близкого к параллельному или один над другим. В дополнение желательно, чтобы манипуляторы не чрезмерно ограничивали взгляд хирурга на тело пациента и входные отверстия. Медицинская роботизированная система, прежде всего по причине кинематической конфигурации руки манипулятора, а также благодаря различным другим описанным ниже признакам, рассматриваемым по существу как обладающие признаками изобретения, среди всего прочего, решает вышеупомянутые вопросы и облегчает одновременное использование множества роботов-манипуляторов.
Другое, относящееся к данной проблеме, ограничение существующих систем касается недостатка надежных и безопасных средств для предотвращения столкновений между различными манипуляторами, между манипуляторами и персоналом в операционном зале и между инструментами и эндоскопом. Любое потенциальное столкновение, однако, представляет серьезный риск для здоровья пациентов и, возможно, для обслуживающего персонала и, следовательно, эффективность предотвращения столкновений в роботизированной хирургической системе имеет большое значение. Данная проблема, очевидно, становится более критической при увеличении количества манипуляторов робота, используемых во время определенного хирургического вмешательства. Ввиду кинематической конфигурации PRP, с одной стороны, риски потенциального столкновения снижаются из-за уменьшенного заграждения самой рукой манипулятора и, с другой стороны, упрощаются способы определения и предотвращения столкновений.
Становится понятным, что система обеспечивает необходимую маневренность с минимальным количеством сочленений, т.е. с 6 степенями свободы - только с 6 сочленениями. Никаких других избыточных сочленений не предусматривается. В частности, особые инструменты с сочлененными удаленными концами инструмента не требуются. Более того, все сочленения приводятся в действие, т.е. необходимо сказать, что в манипуляторе робота нет пассивных или свободно вращающихся сочленений, в силу чего управление роботом в значительной степени усовершенствовано. Устранение избыточных пассивных сочленений, которые используется в известных системах, главным образом, для предотвращения трокарного воздействия, достигается, среди прочего, путем установки датчикового узла (датчика в сборе) на стыковке между шестым сочленением и приводом лапароскопического инструмента. Данное размещение датчикового узла позволяет измерение силы и сдерживание ограничения не только на уровне кончика инструмента, но также на уровне трокара. Еще одна особенность видится в том, что запястный шарнир и сочленения исполнительного блока являются вращаемыми, т.е. на этих частях нет призматических сочленений.
В предпочтительном варианте осуществления изобретения, который, среди прочего, увеличивает жесткость манипулятора, первое (Р) сочленение имеет вертикальную линейную направляющую и первый линейный привод, предпочтительно вал с шаровым и винтовым соединениями с линейным перемещением, для приведения в действие первого сочленения. Подобным образом третье (Р) сочленение имеет горизонтальную линейную направляющую и второй линейный привод, предпочтительно вал с шаровым и винтовым соединениями с линейным перемещением, для приведения в действие третьего (Р) сочленения. Более того, и первое, и третье сочленения имеют ограничитель хода и датчик абсолютного отсчета, соответственно связанный с ним.
Для того чтобы предохранить компоненты вертикальной части и свести к минимуму габариты основного участка вертикальной части над пациентом, предпочтительно, что горизонтальная часть имеет продолговатый кожух, который заключает в себе горизонтальную линейную направляющую и второй линейный привод, при этом горизонтальная часть содержит балку, которая телескопически вытягивается относительно кожуха на одной стороне и поддерживает запястный шарнир на другой стороне.
Преимущественно, второе (R) сочленение имеет передаточный механизм, предпочтительно передаточный механизм с волновой передачей, мотор, предпочтительно бесщеточный сервомотор, связанный с входной ступенью передаточного механизма, и датчик абсолютного отсчета, связанный с выходной ступенью передаточного механизма. Таким образом, достигается компактная конструкция, которая дополнительно позволяет определение неисправности приводного механизма на втором (R) сочленении.
В другом предпочтительном варианте осуществления изобретения запястный шарнир манипулятора содержит вращательное (R) четвертое сочленение и вращательное (R) пятое сочленение для ориентации исполнительного блока. Следовательно, рука манипулятора и запястный шарнир манипулятора вместе обеспечивают точно пять контролируемых степеней свободы.
Для того чтобы гарантировать определенное расстояние от пациента, которое облегчает доступ для персонала, например, в случае опасности, горизонтальная часть руки в предпочтительном варианте исполнения изобретения имеет минимальное отклонение штанги 800 мм, т.е. определенное минимальное расстояние между осями вращения второго и четвертого (R) сочленений. Можно отметить, что занимаемое основанием пространство должно быть принято во внимание при расчетах отклонения, необходимого для беспрепятственного прохождения персонала.
В предпочтительном варианте исполнения изобретения ось вращения четвертого (R) сочленения и второго (R) сочленения параллельны. Более того, предпочтительно, чтобы ось вращения четвертого (R) сочленения была расположена в одной плоскости с плоскостью, образованной осью вращения второго (R) сочленения и осью перемещения третьего (Р) сочленения.
Конкретнее, в предпочтительной конфигурации, четвертое (R) сочленение обеспечивает вращательную степень свободы вдоль по существу вертикальной оси для установки угла наклона в поперечном направлении исполнительного блока и пятое (R) сочленение обеспечивает вращательную степень свободы вдоль по существу горизонтальной оси для установки угла наклона в продольном направлении исполнительного блока. Конечно, угол наклона в поперечном направлении зависит также от фактической конфигурации второго (R) сочленения. Последнее, таким образом, учитывается для установки угла наклона в поперечном направлении посредством четвертого (R) сочленения. В сочетании с кинематической конфигурацией руки манипулятора данная конфигурация избегает сингулярности манипулятора, как становится яснее из описания ниже. Упрощенная взаимообратная кинематика и усовершенствованная маневренность достигаются в предпочитаемом варианте осуществления изобретения, в котором запястный шарнир содержит:
опорную плиту, соединенную с горизонтальной частью руки, и по существу L-образный опорный элемент, при этом четвертое (R) сочленение соединяет первый горизонтальный участок опорного элемента с опорной плитой, а пятое (R) сочленение соединяет второй вертикальный участок опорного элемента с соединительным средством для исполнительного блока, при этом запястный шарнир скомпонован таким образом, что оси вращения четвертого (R) сочленения и пятого (R) сочленения перпендикулярны и имеют точку пересечения.
Для роботизированных манипуляций лапароскопическими инструментами исполнительный блок содержит привод лапароскопического инструмента, имеющий средства для крепления хирургического инструмента к манипулятору, и линейный исполнительный механизм для приведения в действие прикрепленного хирургического инструмента. В последней конфигурации для лапароскопических инструментов предпочтительно, что исполнительный блок содержит основную опорную раму для присоединения исполнительного блока к запястному шарниру и вращательное (R) шестое сочленение, которое соединяет привод лапароскопического инструмента с основной опорной рамой, при этом шестое (R) сочленение обеспечивает вращательную степень свободы вдоль оси, которая совпадает с продольной осью хирургического инструмента, прикрепленного к приводу лапароскопического инструмента, для установки угла вращения прикрепленного хирургического инструмента.
В последнем варианте осуществления изобретения целесообразно, чтобы оси вращения шестого (R) сочленения и пятого (R) сочленения были перпендикулярны. Тем не менее, также можно предположить, например, при применении роботизированной системы в другом типе хирургии помимо минимального инвазивного вмешательства, что данные оси могут быть наклонными, например, чтобы избежать сингулярности из-за возможного наложения шестого и четвертого (R) сочленений.
В предпочтительном варианте осуществления изобретения запястный шарнир манипулятора скомпонован таким образом, что оси вращения шестого (R) сочленения и четвертого (R) сочленения смещены на расстояние, соответствующее приблизительно диаметру привода лапароскопического инструмента в его наибольшем поперечном сечении. Данный вариант осуществления позволяет работать двум роботизированным манипуляторам при близко размещенном надрезе с пониженным риском столкновения.
Для того чтобы позволить обратную связь по усилию на тактильном интерфейсе хирурга, исполнительный блок в предпочтительном варианте осуществления изобретения включает в себя датчиковый узел, содержащий датчик силомоментного очувствления с 6 степенями свободы, и акселерометр линейных и угловых ускорений, совпадающий с 6 степенями свободы, при этом узел соединяет привод лапароскопического инструмента с шестым (R) сочленением. Данный датчиковый узел позволяет измерять линейное и угловое ускорения и отклонение привода лапароскопического инструмента, и любые силы или моменты, прилагаемые к телу пациента вставленным инструментом. Линейный и угловой акселерометры используют для компенсации влияния гравитации и ускорения на датчик силомоментного очувствления.
Многие существующие медицинские роботизированные системы испытывают недостаток обратной связи по усилию и, таким образом, лишают хирурга восприятия прилагаемой к тканям пациента силы. Таким образом, хирург может надеяться только на визуальную обратную связь своих движений для того, чтобы ограничить воздействие инструмента на ткани. Фактически, обратная связь по усилию значительно повышает безопасность при использовании роботов для хирургической лапароскопии. В дополнение, тактильное очувствление относится к ощупыванию органов для удержания вязких органов инструментом, который отсутствует в поле видимости эндоскопа, для применения достаточного натяжения для сшивания и избегания разрывов, для обнаружения чрезмерных сил, прилагаемых к органам и, следовательно, прекращения или ограничения движения, для ограничения сил, прилагаемых на трокарное рассечение, и т.п. В работе "Разработка приводных пинцетов и пинцетов со встроенным датчиком для роботизированной хирургии минимальной инвазии". Б. Кюблер, У. Зайболд и Г.Хирцингер, Годовая конференция немецкого общества компьютерно- и роботассистируемой хирургии, октябрь 8-9, 2004, Мюнхен, Германия («Development of actuated and sensor integrated forceps for minimally invasive robotic surgery» by B.Kübler, U.Seibold и G.Hirzinger - Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC); был представлен миниатюрный датчик силомоментного очувствления с 6 степенями свободы, установленный на кончике инструмента. Данная концепция имеет несколько недостатков, среди которых повышенные затраты на инструмент, недостаточность эксплуатационной надежности в отношении стерилизации и проблем экранирования от внутренних радиопомех, в случае использования с электроприводными инструментами.
В отношении конструкции привода, четвертое (R) сочленение, пятое (R) сочленение и/или шестое сочленение имеет мотор, предпочтительно бесщеточный сервомотор, передаточный механизм, имеющий соединенную с валом мотора входную ступень, ременную передачу, соединенную с выходной ступенью передаточного механизма для передачи движения соответствующему сочленению, и датчик абсолютного отсчета, соединенный с ременной передачей. Данная конструкция позволяет определение неисправности сочленения на конце трансмиссионной цепи.
Для определения проникновения персонала в рабочее пространство манипулятора, основание каждого робота-манипулятора предпочтительно имеет лазерный сканер дальности.
Краткое описание чертежей
Вышеупомянутые аспекты, также как и другие изобретательские аспекты и предметы настоящего изобретения, становятся очевидными из следующего подробного описания, не ограниченного вариантами, со ссылками на прилагаемые чертежи, на которых:
Фигура 1: является перспективным изображением медицинской роботизированной системы для универсальной хирургической лапароскопии в операционном зале с тремя роботизированными манипуляторами, установленными вокруг операционного стола, на котором лежит пациент;
Фигура 2: является перспективным изображением медицинской роботизированной системы для универсальной хирургической лапароскопии с пятью роботизированными манипуляторами;
Фигура 3: является перспективным изображением робота-манипулятора медицинской роботизированной системы фигуры 1 и фигуры 2, показывающим основные координатные системы;
Фигура 4: является перспективным изображением робота-манипулятора фигуры 3, частично разобранного на основные части;
Фигура 5: является блок-схемой кинематической конфигурации робота-манипулятора фигуры 3, включающего сочленения J1-J6;
Фигура 6: является видом сверху роботизированной хирургической системы с пятью роботизированными манипуляторами, иллюстрирующим коробки распознавания 2 D столкновения, включающие в себя компоненты манипулятора;
Фигура 7: является перспективным изображением основания робота-манипулятора фигуры 3;
Фигура 8: является видом сверху медицинской роботизированной системы, показывающим лазерное 2 D распознавание для того, чтобы распознать приближение помощника хирурга к манипулятору робота;
Фигура 9: является перспективным изображением внутренних компонентов сочленений J1, J2 и J3 робота-манипулятора фигуры 3;
Фигура 10: является перспективным изображением внутренних компонентов сочленения J2, робота-манипулятора фигуры 3;
Фигура 11: является первым перспективным изображением внутренних компонентов запястного шарнира манипулятора, включающего в себя сочленения J4 и
J5;
Фигура 12: является вторым перспективным изображением внутренних компонентов запястного шарнира манипулятора, включающего в себя сочленения J4 и J5;
Фигура 13: является третьим перспективным изображением внутренних компонентов запястного шарнира манипулятора, включающего сочленения J4 и J5;
Фигура 14: является перспективным изображением, показывающим исполнительный блок робота-манипулятора фигуры 3 и приспособленный инструмент, который должен быть соединен с исполнительным блоком;
Фигура 15: является перспективным изображением основных внутренних компонентов исполнительного блока фигуры 14;
Фигура 16: является перспективным изображением системы координат опорной точки;
Фигура 17: является перспективным изображением переходника инструментального стержня (ПИС) и соответствующего инструментального стержня;
Фигура 18: является увеличенным перспективным видом привода лапароскопического инструмента (ПЛИ), как показано на фигуре 14;
Фигура 19: является перспективным изображением привода в сборе в ПЛИ фигуры 18;
Фигура 20: является перспективным изображением снизу, показывающим другие внутренние компоненты ПЛИ, показанные на фигуре 18;
Фигура 21: является перспективным изображением сверху, показывающим другие внутренние компоненты ПЛИ, показанные на фигуре 18;
Фигура 22: является перспективным изображением, показывающим механизм сочленения, используемый в ПЛИ, показанный на фигуре 18;
Фигура 23: является перспективным изображением робота-манипулятора в соответствии с фигурой 3, имеющим модифицированный запястный шарнир манипулятора;
Фигура 24: является перспективным изображением медицинской роботизированной системы для универсальной хирургической лапароскопии с четырьмя роботизированными манипуляторами в соответствии с фигурой 23 и одним роботом-манипулятором в соответствии с фигурой 3;
Фигура 25: является перспективным изображением варианта осуществления привода лапароскопического инструмента (ПЛИ) для использования в исполнительном блоке, показанном на фигуре 14;
Фигура 26: является перспективным изображением ПЛИ фигуры 24 с вариантом осуществления переходника инструментального стержня (ПИС), соединенного с ПЛИ;
Фигура 27: является перспективным изображением привода в сборе, используемого в ПЛИ фигуры 24;
Фигура 28: является другим перспективным изображением ПИС, показанного на фигуре 26;
Фигура 29: является частично вскрытым перспективным изображением ПИС, показанного на фигуре 26;
Фигура 30: является другим частично вскрытым перспективным изображением ПИС, показанного на фигуре 26 и фигуре 28 с другим инструментом, подсоединенным к переходнику.
На этих чертежах везде используются одинаковые номера ссылок, для всех идентичных частей.
Подробное описание со ссылкой на чертежи
Фигура 1 показывает медицинскую роботизированную систему для универсальной хирургической лапароскопии, в общем обозначенную ссылочным номером 10. Пациент Р, накрытый стерильной простыней, лежит на операционном столе 12, вокруг которого располагается множество роботизированных манипуляторов 14. В показанном на фигуре 1 примере медицинская роботизированная система 10 установлена для хирургического вмешательства в почечной области. Хирург S работает с главной хирургической панелью управления 15 и помощник хирурга А стоит около операционного стола 12 и рядом с лотком 16 с набором подходящих лапароскопических инструментов 18. Роботизированные манипуляторы 14 разработаны для позиционирования и ориентации исполнительного блока, который удерживает и по возможности приводит в действие различные виды лапароскопических инструментов 18. Во время операции роботизированные манипуляторы 14 управляются дистанционно одним или более хирургами S через один или более главных хирургических пультов управления 15, которые соединены в блок управления (не показан). Как становится понятным, медицинская роботизированная система 10 является модульной и настраиваемой в соответствии с типом хирургического вмешательства, имеющей в общем до 5 манипуляторов и обычно с минимальной конфигурацией, включающей в себя два манипулятора. Конфигурация медицинской роботизированной системы 10' с 5 манипуляторами 14 показана, например, на фигуре 2. Система 10, показанная на фигуре 1, оснащена лазерными сканерами 22 дальности, установленными на основании каждого робота-манипулятора 14. Лазерный сканер дальности 22 используется для безопасности хирургического вспомогательного персонала в операционном зале.
Фигура 3 является пространственным видом робота-манипулятора 14, который образует один механический блок роботизированной хирургической системы 10. Робот-манипулятор 14 установлен на основании 24, которое может быть закреплено на полу операционного зала и подвижно, когда не закреплено. Три координатные системы также показаны на фигуре 3, т.е. основания, инструментального патрона (ИП) и координатная система вершины лапароскопического инструмента (ВЛИ). Как видно на фигуре 3, робот-манипулятор 14 содержит руку 26 манипулятора и запястный шарнир 28 манипулятора.
На фигуре 4 показаны основные части робота-манипулятора 14. Рука 26 имеет по существу вертикальную часть 27 и по существу горизонтальную часть 29. Первый конец руки 26 на вертикальной части 27 должен быть закреплен к основанию 24, в то время как запястный шарнир 28 должен быть закреплен ко второму концу руки 26, т.е. к концу горизонтальной части 29. Исполнительный блок 30 для подходящего лапароскопического инструмента 18 должен быть соединен с инструментальным патроном 32 запястного шарнира 28. Как показано стрелками на фигуре 3, рука 26 имеет три степени свободы, а запястный шарнир 28 имеет две степени свободы. Соответственно, робот-манипулятор 14 является в целом роботизированным манипулятором с 5 степенями свободы. Дополнительная степень свободы для вращения лапароскопического инструмента 18, установленного на исполнительном блоке 30, вокруг своей продольной оси обеспечивается исполнительным блоком 30. Взаиморасположение степеней свободы робота-манипулятора 14 и исполнительного блока 30 становится более очевидным из следующего описания фигуры 5.
Как наилучшим образом видно на геометрической модели фигуры 5, рука 26 сочленяется с основанием 24 посредством первого сочленения J1, которое является призматическим (Р) скользящим сочленением (или сочленением прямолинейного движения). Первое сочленение J1 соединяется с основанием 24 посредством штанги основания L0 и обеспечивает поступательную степень свободы вдоль по существу вертикальной оси. Первое сочленение J1, таким образом, позволяет вертикальное позиционирование первого, по существу вертикального звена L1 и последующих компонентов, прикрепляемых к последнему, относительно основания 24 и звена L0. Другими словами, сочленение J1 определяет высоту вертикальной части 27. Второе сочленение J2, которое является вращательным (R) сочленением, соединяет первое звено L1 со вторым, по существу горизонтальным звеном L2 руки 26. Ось вращения вращательного сочленения J2 является по существу вертикальной. Сочленение J2 позволяет установить относительный угол между звеном L2 и его первоначальным угловым положением в горизонтальной плоскости. Третье призматическое скользящее (Р) сочленение J3 соединяет звено L2 с третьем, по существу горизонтальным звеном L3. Сочленение (Р) J3 обеспечивает поступательную степень свободы вдоль по существу горизонтальной оси и позволяет устанавливать досягаемость или вытягивание руки 26, а точнее горизонтальной части 29 посредством горизонтального смещения звена L3 относительно звена L2. Звенья L2 и L3 вместе с (Р) сочленением J3 образуют горизонтальную удлиняемую консоль или стрелу робота-манипулятора 14.
С двумя (Р) сочленениями и одним (R) сочленением, расположенными, как видно на фигуре 5, рука 26 имеет одну вращательную степень свободы вокруг по существу вертикальной оси и связанные с ней две поступательные степени свободы вдоль двух перпендикулярных осей. Соответственно, рука 26 робота-манипулятора 14 имеет цилиндрическую конфигурацию, т.е. кинематическая конфигурация манипулятора 14 принадлежит классу цилиндрических типов роботов PRP (Призматический - Ротационный - Призматический). А точнее, каждое сочленение из первых трех J1, J2, J3 в указанном порядке соответствует цилиндрическим координатам (z, θ, r): z является угловой координатой в вертикальной плоскости (или высотой), θ является координатой угла поворота (или азимут) и r является координатой радиального удлинения (или радиус).
Как видно далее на фигуре 5, запястный шарнир 28 содержит два вращательных сочленения J4 и J5 и исполнительный блок 30 включает в себя одно вращательное сочленение J6. Вращательные сочленения J2, J4, J5, J6, соответственно, определяют ориентацию подходящего лапароскопического инструмента 18, прикрепленного к исполнительному блоку 30. Вращательное сочленение J4 соединяет звено L3 со звеном L4 и позволяет вращать звено L4 с последующими частями вокруг по существу вертикальной оси, которая параллельна оси вращения сочленения J2. Следовательно, вращательное сочленение J4 позволяет в комбинации с фактической установкой сочленения J2 установить угол поворота исполнительного блока 30. Следует отметить, что ось вращения вращательного сочленения J4 является копланарной с плоскостью, образованной осью вращения вращательного сочленения J2 и осью перемещения призматического сочленения J3. Вращательное сочленение J5 соединяет звено L4 с инструментальным патроном 32 и позволяет вращать инструментальный патрон 32 с последующими частями вдоль по существу горизонтальной оси перпендикулярно оси вращения сочленения J4. Следовательно, вращательное сочленение J5 позволяет устанавливать угол наклона исполнительного блока 30. Исполнительный блок 30 соединен с инструментальным патроном 32 через звено L5. Ось вращения вращательного сочленения J6 по существу перпендикулярна оси вращения сочленения J5 и соединяет звено L5 со звеном L6. Ось вращения вращательного сочленения J6 совмещена со звеном L6 и определяет относительный угол звена L6 по отношению к его первоначальному угловому положению. Подходящий лапароскопический инструмент 18 соединен со звеном L6. Инструмент 18, представленный звеном L7, совмещен со звеном L6. Конечная точка штанги L7 представляет вершину 17 инструмента.
Цилиндрическая кинематическая конфигурация PRP манипулятора 26 имеет различные преимущества, среди которых:
относительно малое замкнутое пространство, занятое конструкцией манипулятора около операционного стола;
факт того, что основание манипулятора находится на достаточном расстоянии (благодаря минимальному смещению звена горизонтальной части 29-800 мм) от операционного стола для облегчения хирургу доступа к операционному столу и перемещения пациента с операционного стола или на операционный стол;
легкое и быстрое вычисление определения взаимного столкновения манипуляторов.
Эти и другие аспекты становятся более очевидны из следующих абзацев. Преимущества, получаемые в результате выбранной кинематической конфигурации руки 26 робота-манипулятора, упрощают вычисления определения столкновения между множеством манипуляторов 14, расположенных с пересечением рабочих пространств вокруг операционного стола 12 (фигура 1 и 2). Благодаря цилиндрической конфигурации, робот-манипулятор 14 может быть приближен с простыми плоскостными геометрическими характеристикам в двумерной (2D) горизонтальной плоскости. Как наилучшим образом видно на фигуре 6, механические звенья руки 26 могут быть заключены в прямоугольник различной длины и ориентации в указанном порядке, отвечающим соответственно (J3+L2+L3) и J2; ширина прямоугольной огибающей задается геометрией механического звена, плюс буферная зона в зависимости, например, от необходимого пространства для гашения максимальной скорости робота до останова плюс порог безопасности. Буферная зона каждой стороны прямоугольных огибающих может динамически изменять размер в соответствии с направлением и скоростью движения, например, чем выше скорость в направлении стороны огибающей, тем шире буферная зона для данной стороны огибающей. Запястный шарнир 28 отождествляется прямоугольником, огибающим корпус звена L4 и часть звена L5, и с переменной плоскостной ориентацией, заданной текущим угловым положением сочленения J4. Подобно этому, исполнительный блок 30 может отождествляться прямоугольником, огибающим его проекцию на 2D горизонтальной плоскости, где угол проекции соответствует текущему угловому положению сочленения J5. Тот же самый принцип применяется к стержню инструмента 18, соединенного с исполнительным блоком 30. Такая простая геометрическая двумерная характеристика позволяет установить простые и эффективные алгоритмы для определения столкновений, основанных на пересечении их линий. В первой стадии метод определения столкновений состоит из проверки столкновения в горизонтальной проекции 2D. Только если любая из этих двух фигур сталкивается с фигурой другого робота-манипулятора 14, существующий риск реального столкновения затем уточняется включением третьего измерения. Как становится понятным, трехмерные расчеты, таким образом, необходимо выполнять только для пересекающихся сторон касающихся частей роботизированных манипуляторов 14. В этом упрощенном трехмерном вычислении, касающиеся части огибаются, например, треугольной моделью. В результате, алгоритмы быстрого определения пересечения могут легко осуществляться, например, такими как предлагаются в работе "Экспресс-тест на пересечение треугольник-треугольник" Моллера (Moller), "Journal of Graphics Tools", 2(2), 1997. В частности, определение столкновения между стержнями инструментов 18 особенно важно для защиты эндоскопа от подключенных к электросети инструментов.
Для точного результата определения столкновения между манипуляторами робота 14, положение и ориентация всех роботизированных манипуляторов 14 относительно общей отсчетной системы координат определяются с помощью процедуры калибровки после расположения манипуляторов 14 в операционном зале. С функциональной точки зрения, после определения риска столкновения система управления должна задержать касающиеся манипуляторы 14 и предупредить хирурга S через соответствующую дисплейную информацию и/или обратную связь отталкивающего усилия на главной панели управления 15. Хирург S может затем просто исправить ситуацию путем дистанционного управления одним из манипуляторов в безопасном направлении. При дальнейшем усовершенствовании, внедряют несколько уровней защиты от столкновений, используя не менее двух огибающих с различными буферными зонами для каждой группы частей, например руки 26, запястного шарнира 28, исполнительного блока 30 и/или инструмента 18. После определения риска столкновения с наиболее выдающейся вперед огибающей, движение, подаваемое хирургом S в направление столкновения, резко уменьшается в отношении проникновения в буферную зону.
Другое преимущество по отношению к конфигурации руки 26 относится к улучшенной управляемости соотнесенными с сочленениями J1, J2, J3 приводами. По сравнению с другими классами роботов (например, сферических или шарнирных) и как результат конфигурации руки, управление этих приводов улучшено, поскольку J1, J2, J3 и J4 не подвергаются изменяющимся гравитационным нагрузкам и поскольку J1, J3 и J5 не имеют изменяющихся внутренних нагрузок. Это позволяет достичь упрощенной оптимизации цепей управления (например, идентификатор процесса с прямой связью) и очень низкой динамической ошибки слежения положения, например всего лишь нескольких одиночных импульсов кодировщика мотора. Кроме представленных преимуществ, механическая конструкция рассматривает жесткую, но облегченную конструкцию звеньев L2 и L3 для ограничения их отклонения и колебаний, в случае если звено J1 и/или звено J2 производит резкое движение.
Необходимо отметить два других преимущества, обусловленных геометрией робота-манипулятора 14. Во-первых, в силу того что основание манипулятора 24 размещено на достаточном расстоянии от операционного стола 12 (например, как минимум 600 мм) и рука 26 спроектирована таким образом, что она может быть повернута вручную вокруг звена J2 (с отпущенным стопором) в исходное положение, хирург S может без труда и быстро подойти к операционному столу 12 для выполнения ручной работы, такой как инсуффляция, удаление анатомического органа, окончательное наложение швов и т.п. Более того, перенос пациента с операционного стола или на операционный стол 12 возможен в быстром темпе. Во вторых, по сравнению с геометрией SCARA, использованной, например, в руке известного под коммерческим названием ZEUS манипулятора, имеющее локтевое вращательное сочленение, соединяющее два копланарных звена одинаковой длины, для достижения определенного горизонтального положения цилиндрическая конфигурация манипулятора 14 имеет одиночное радиальное вытяжное сочленение J3, которое значительно сокращает пространство, занимаемое запястным шарниром 28 в положении над телом пациента Р. Как показано на фигуре 2, данный признак позволяет размещать пять и более манипуляторов 14 у операционного стола 12, исходя из того, что размеры запястного шарнира и исполнительного блока будут достаточно маленькими, т.е. занимать достаточно небольшое пространство в доступном рабочем месте над телом пациента.
В следующих абзацах будет дано более подробное описание конструкции робота-манипулятора 14 со ссылкой на фигуры 7-15.
Фигура 7 показывает некоторые признаки основания 24. Основание 24 включает в себя главную основную плиту 40 и установлено в виде конструкции, выполненной с возможностью перемещения с помощью четырех колес 42, смонтированных в отверстиях по углам основной плиты 40. Каждое колесо 42 заключено в крышку 43 с отверстием для доступа к ручке для выдвижения или втягивания колес 42. Когда колеса 42 втянуты внутрь, основание 24 установлено неподвижно на полу операционного зала посредством амортизирующих опор (не показаны) колес 42. После выдвижения колес 42, основание 24, включающее в себя робот-манипулятор 14, можно передвинуть вручную. В различных конструкциях, основание 24 может быть установлено на подвижной или неподвижной оси продольного рельса или на тележке, сконструированной для поддержки нескольких оснований 24 и соотнесенных манипуляторов 14. Главная плита основания 40 сконструирована так, что она, при необходимости, может крепиться к полу, например привинчиваться винтами с использованием отверстий 44, для того чтобы придать дополнительную устойчивость роботизированному манипулятору 14. Робот-манипулятор 14 крепится к основанию 24 с помощью болтов в нарезных отверстиях 45. В основной плите 40 выполнено несколько высокоточных отверстий 46. Отверстия 46 служат для поддержки рефлекторов оптической калибровки, которые используют для определения положения и ориентации основания 24 с помощью системы оптического измерения, как описано в работе "Калибровка робота" Р.Бернхарда и С.Олбрайта («Robot calibration» by R. Bernhardt and S. Albright), изданной Chapman & Hall, 1993 г. Необходимо отметить, что робот-манипулятор 14 калибруется в течение процедур фабричной настройки для того, чтобы точно определить его геометрическую модель. Более того, основание содержит корпус 48 для источника питания и сервоприводов бесщеточных моторов, устройств формирования сигналов, средств для местной обработки смонтированных на руке датчиков и коммуникационные каналы для устройства дистанционного управления. Как показано на фигуре 1 и наилучшим образом видно на фигуре 8, на основании 24, более точно на корпусе 48, установлен двумерный лазерный сканер дальности 22 для того, чтобы обеспечить определение проникновения, например, ассистента А внутрь периметра безопасности вокруг звеньев L2 и L3.
Следует отметить, что в общем в медицинской роботизированной системе 10 используются два различных типа роботизированных манипуляторов 14. Хотя два типа роботизированных манипуляторов 14 имеют по существу ту же самую геометрию и кинематическую конфигурацию PRP руки 26, первый тип устанавливается специально для управления эндоскопом, используемым для визуализации, в то время как второй тип устанавливается для управления любыми различными видами лапароскопических инструментов 18, применяющихся непосредственно для операции. Для лапароскопии, как правило, используют один робот-манипулятор 14 первого типа, в то время как роботизированных манипуляторов 14 второго типа используют несколько. В медицинской роботизированной системе 10 основные различия между данными двумя типами роботизированных манипуляторов 14 следующие:
ход сочленения J3 длиннее для манипулятора эндоскопа (около 750 мм), поскольку он требует поворота на 360° вокруг своего входного отверстия (обычно с целью поиска);
ход сочленения J4 неограничен для манипулятора эндоскопа, поскольку он требует вращения на 360° вокруг входного отверстия. Это достигается использованием сигнального коллектора на оси J4;
для манипулятора эндоскопа сочленение J6 не требуется, т.е. эндоскоп может крепиться непосредственно к сочленению J5;
исполнительный блок 30 манипулятора эндоскопа, как правило, состоит из эндоскопа и датчика силомоментного очувствления для определения дополнительных усилий;
требования к скорости/ускорению для всех соединений минимум на 60% ниже для манипулятора эндоскопа, поскольку это требует только возможности позиционирования эндоскопа.
Принимая во внимание данные различия, настоящее описание фокусируется на втором типе робота-манипулятора 14, поскольку последний имеет более жесткие требования к конструкции.
Ссылаясь на фигуру 9, ниже даны подробности, касающиеся конфигурации сочленений J1-J3 руки 26 манипулятора, включая его соответствующие приводы.
Как и сопряженный линейный привод, (Р) сочленение J1 для подъема руки содержит вал с шаровым и винтовым соединениями с линейным перемещением 50 (например, подходящая модель серии ЕТ, производимая компанией Parker Hannifin, Электромеханический отдел, Оффенбург, Германия и компанией Poole, Великобритания). Линейный вал с шаровым и винтовым соединениями 50 приводится в движение бесщеточным сервомотором 51, оснащенным позиционным кодовым датчиком пошагового двигателя и тормозом. Дополнительно, линейное перемещение 50 обеспечивается с помощью вспомогательного датчика абсолютного линейного отсчета (не показан) на выходной ступени, с концевыми переключателями и с механическим амортизатором конца хода (не показан). Вертикальная линейная направляющая 52 оперативно связана с линейным перемещением 50 для обеспечения линейности перемещения и жесткости при кручении. Линейное перемещение 50 крепится к кронштейнам 53 для крепления руки 26 к основанию 24. Контрольные и силовые провода прокладываются в вертикальном кабельном канале (не показан) внутри крышки сочленения J1. Наружная крышка 54 закрывает компоненты призматического (Р) сочленения J1, как лучше всего видно на фигуре 3. В отношении узла силового привода сочленения J1, можно отметить, что передаточное число мотор/нагрузка устанавливается таким образом, чтобы предотвратить нежелательную неисправность горизонтальной части 29, также в случае, если тормоза мотора выходят из зацепления, или когда сервомотор 51 отключен. В дополнение, кнопка аварийного останова (не показана) размещена на наружной крышке 54, которая служит для останова всех роботизированных сочленений в случае опасности. Как видно на фигуре 9, вышеупомянутые компоненты руки манипулятора 26 составляют ее вертикальную часть 27.
Фигура 9 также показывает (R) сочленение J2, образующее плечевое сочленение руки 26. Как лучше всего видно на фигуре 10, сочленение J2 состоит из узла бесщеточного сервомотора 61 на одной оси с передаточным механизмом 62 типа Harmonic Drive® для передачи нагрузки. Бесщеточный мотор 61 оснащен позиционным кодовым датчиком и тормозом, срабатывающим при отключении питания. В дополнение, узел привода содержит другой датчик 65 абсолютного отсчета вращения, который приводится ремнем 66, соединенным с выходной ступенью передаточного механизма 62, и механический амортизатор конца хода и концевые переключатели (не показаны). Предусмотренный на крышке 64 ключевой переключатель (не показан) позволяет отключать тормоза сочленений J2, J3, J4, J5 и J6, когда их соответствующий двигатель отключен. Это позволяет передвигать руку 26 и исполнительный блок 30 вручную в исходное положение. Контрольные и силовые провода от следующих далее сочленений J3-J6 и от исполнительного блока 30 прокладывают от J3-J1 в гибкой кабельной трубе (не показана), которая проходит под крышкой 64. Альтернативно, такие кабели могут быть проложены, например, через полый вал соответствующего передаточного механизма и двигателя в сборе.
Фигура 9 также показывает конструкцию горизонтальной части 29 руки 26, включающую в себя (Р) сочленение J3 для установки радиального удлинения, т.е. досягаемости горизонтальной части 29. Сочленение J3 содержит линейное цилиндрическое перемещение 70, например вал с шаровым и винтовым соединениями с линейным перемещением, как и сопряженный линейный привод. Например, используется ЕТ модель привода, произведенного вышеупомянутой компанией, приводимого в действие бесщеточным сервомотором 71 с позиционным кодовым датчиком двигателя и тормозом, срабатывающим при отключении питания. Стержень линейного цилиндрического перемещения 70 сдвигает балку 72, которая скомпонована в виде прямоугольной трубы и установлена на роликах линейной направляющей 73, Данная конструкция позволяет снизить линейное отклонение. Дополнительно линейный цилиндрический вал 70 снабжается вспомогательным датчиком абсолютного линейного отсчета на выходной ступени с концевыми переключателями и с механическим амортизатором конца хода (не показан). Контрольные и силовые линии проложены в горизонтально размещенном кабельном канале. Крышка 74 прикреплена к частям, образующим второе звено L2, и прикрывает компоненты (Р) сочленения J3, в частности линейный привод 70 и линейную направляющую 73. Как видно на фигуре 9, балка 72, которая образует часть звена L3, скомпонована для втягивания и соответственно вытягивания из крышки 74. Таким образом, рука 26 оснащена горизонтальной частью 29, сужающейся в оконечности, которая требует всего лишь ограниченного размера пространства над пациентом Р. Более того, в задней части верха крышки предусмотрены индикаторные лампы 74 для визуального отображения состояние питания и работы.
На ссылках фигуры 11-13 ниже будет подробно показана конструкция запястного шарнира 28 и, более конкретно, сочленение J4 и J5.
Механика конструкции и принцип действия показанного на фигуре 11-13 (R) сочленения J4 содержит опорную плиту 80, на которой вертикально установлен бесщеточный сервомотор 81. Сервомотор 81 снабжен позиционным кодовым датчиком 82 и преобразователем Холла на валу двигателя. Например, в качестве сервомотора 81 используется подходящая модель серии ЕС мотора от MAXON MOTOR A.G., Захсельн, Швейцария. (R) сочленение J4 также содержит передаточный механизм из связанного с сервомотором 81 передаточного механизма 83 и приводного ремня 84 и систему шкивов 85 для привода силового осевого шкива 86, который связан с соединительным фланцем 87. Дополнительный абсолютный датчик 88 одиночного поворота присоединен к шкиву 89, который также приводится приводным ремнем 84 и прикреплен к нижней стороне опорной плиты 80. Для того чтобы облегчить прокладку кабелей от сочленения J5 к сочленению J4, узел содержит силовой осевой шкив 86 и соединительный фланец 87, который имеет полый вал и боковое окно на соединительном фланце 87. Опорная плита 80 жестко прикреплена к балке 72 посредством двух монтажных пластин 90. Как видно на фигуре 14, крышка 92 служит для защиты частей сочленения J4. Внутри крышки предусмотрены кабели со штекерами от исполнительного блока 30, от сочленения J5 и J4, для того чтобы запястный шарнир 28 мог быть съемным для целей технического обслуживания. Кнопка аварийного останова предусмотрена на крышке 92 сочленения J4. Срабатывающий при отключении питания тормоз предпочтительно установлен на валу сервомотора 81. Для того чтобы снизить боковое смещение О1, которое может представлять ограничивающий фактор в конфигурации множества роботизированных манипуляторов, мотор также может быть совмещен с осями силового осевого шкива 86 и датчика 88. В этом случае, опорная плита 80 имеет округленную кромку вокруг силового осевого шкива 86.
Механика конструкции и принцип действия (R) сочленения J5 также показаны более подробно на фигуре 11-13. L-образный опорный элемент 100 связывает сочленение J5 с сочленением J4 посредством соединенного с сочленением J4 горизонтального участка и вертикального участка в качестве закрепленной рамы для сочленения J5. Он содержит бесщеточный сервомотор 101, например, подходящую ЕС модель компании MAXON MOTOR A.G, с позиционным кодовым датчиком 102 и преобразователем Холла на валу двигателя. Как видно на фигуре 13, сервомотор 101 установлен поперечно на опорном элементе 100. Как видно на фигуре 12 и 13, (R) сочленение J5 также содержит передаточный механизм, соединенный с мотором 101 через передаточный механизм 103 и приводной ремень 104, и систему шкивов 105 для привода силового осевого шкива 106. Дополнительный датчик 108 абсолютного одиночного поворота присоединен к шкиву 109, который также приводится приводным ремнем 104, и присоединен к внутренней стороне опорного элемента 100. Для того чтобы облегчить прокладку кабелей от блока исполнительного органа 30 до сочленения J4, имеется ряд особенностей. В опорном элементе 100 предусмотрены два отверстия 110 и 112, полое осевое отверстие 114 в шкиве 106 и инструментальном патроне 32 и опора кабельной прокладки 116 для шкива 106. L-образный опорный элемент 100 имеет боковые усиления для того, чтобы гарантировать жесткость конструкции для поддержки исполнительного блока 30 посредством инструментального патрона 32. При необходимости, (R) сочленение J5 предпочтительно содержит концевые переключатели и тормоз, срабатывающий при отключении питания (не показан). Если предусмотрено, последний предпочтительно установлен на приводимом приводным ремнем 104 шкиве для того, чтобы снизить боковое смещение О2, которое может составлять ограничивающий фактор в конфигурации нескольких роботизированных манипуляторов.
Фигура 14 и 15 показывают исполнительный блок 30, спроектированный для соединения с инструментальным патроном 32 сочленения J5, со своими тремя основными частями: приводом 120 лапароскопического инструмента, датчиком 122 в сборе, включающим в себя имеющий 6 степеней свободы датчик силомоментного очувствления и акселерометр линейных и угловых ускорений с 6 степенями свободы, и крышкой 124 для сочленения J6. Сочленение J6 соединено с датчиковым узлом 122. Привод 120 лапароскопического инструмента оснащается гнездом 130 для установки на робот-манипулятор 14 подходящего лапароскопического инструмента 18.
Для упрощения, привод лапароскопического инструмента 120 и датчиковый узел 122, включающий в себя измерительные датчики усилия, кручения и ускорения, имеют аббревиатуры ПЛИ (привод лапароскопического инструмента) и ДУКУ (датчики усилия, кручения и ускорения), соответственно. Компоненты исполнительного блока 30 совмещены таким образом, что сочленение J6 вращает вставленный лапароскопический инструмент 18 вокруг продольной оси симметрии последнего, и так, что эта ось совпадает с нормальной (вертикальной) Z осью ДУКУ 122. Расположение исполнительного блока 30 относительно оси вращения (R) сочленения J5 выбрано на точке равновесия исполнительного блока 30 таким образом, чтобы избежать наклона, когда сочленение J5 останавливается и обесточивается. Следовательно, основная опорная рама 140 исполнительного блока 30, которая соединена с запястным шарниром 28, скомпонована таким образом, что исполнительный блок 30 в сборе уравновешен на оси вращения (R) сочленения J5.
Передаточное число мотор/нагрузка для сочленения J5 также содействует сопротивлению наклона.
Фигура 15 показывает конструкцию сочленения J6. Бесщеточный мотор 141 с инкрементальным кодовым датчиком 142 и передаточным механизмом 143 крепится к главной опорной раме 140 (которая соединяется с инструментальным патроном 32). Соединенный с мотором 141 шкив 145 мотора соединен со шкивом 146 нагрузки посредством ремня 144. Шкив 146 нагрузки обеспечивает вращательную степень свободы сочленения J6. Дополнительный датчик 148 абсолютного положения закреплен на оси шкива 146 нагрузки, совпадающей с осью (R) сочленения J6. Позиционный кодовый датчик 148 имеет полый вал для прохождения контрольных и силовых проводов ПЛИ 120 и ДУКУ 122 к вращающемуся коллектору 150 типа скользящего кольца или скользящего контакта. Скользящий коллектор 150 позволяет бесконечное осевое вращение для сочленения J6. Шкив 146 нагрузки соединен с ДУКУ 122 через соединительный фланец 152. Кабели контрольных и силовых линий для ПЛИ 120 и ДУКУ 122 направляются внутрь крышки 124 через полый проход в соединительном фланце 152. Как станет понятно, робот-манипулятор 14 в целом оснащен внутренними каналами для обеспечения защитного ограждения всех контрольных и силовых линий, например сочленений J1 - J6 и компонентов блока исполнительного органа 30, таких как ПЛИ 120 и ДУКУ 122. В другом варианте осуществления (не показано) конфигурацию сочленения J6 осуществляют со следующими двумя модификациями. Во-первых, уменьшение смещения О3 путем размещения узла мотор - передаточный механизм - шкив 141, 143, 144, 145 под углом 90 градусов относительно ориентации, показанной на фигуре 15. Во-вторых, смещение О4 уменьшено путем создания конфигурации узла мотор - передаточный механизм 141, 143 для более близкого расположения к ПЛИ 120.
Как становится понятно, оси вращения сочленений J4, J5 и J6 в предлагаемом варианте осуществления изобретения пересекаются в одной и той же точке в пространстве. Таким образом, потенциальное смещение, вызванное штангой L5, устраняется.
Как показано на фигуре 23 и 24, альтернативная конструкция может, однако, производить смещение O5 благодаря штанге L5, например, для того, чтобы улучшить маневренность в случае, когда необходимо вставить два подходящих лапароскопических инструмента 18 в расположенные поблизости друг от друга трокары (впускное отверстие 20). Например, показанная на фигурах 23 и 24 особая конструкция предусматривает модифицированный запястный шарнир 28' манипулятора, имеющий благодаря штанге L5 отрицательное смещение О5. Отрицательное смещение О5 позволяет помещать блок исполнительного органа 30 первого робота-манипулятора 14 над блоком исполнительного органа 30 второго робота-манипулятора 14 без столкновений между запястными шарнирами 28'. Однако данная измененная конфигурация требует увеличенную досягаемость для сочленения J3 и более высокой скорости и способности к ускорению для сочленений J2, J3 и J4. Как станет понятно из фигуры 24, конфигурация запястного шарнира 28' для работы с множеством близко расположенных отверстий входа 20 (трокары 200) является преимущественной. Понятно и то, что в предпочтительном варианте осуществления изобретения величина смещения О5 между осями вращения J6 и J4, показанного на фигуре 23, является приблизительно диаметром ПЛИ 120 на его наибольшем сечении.
Некоторые другие аспекты и преимущества в отношении конструкции робота-манипулятора 14 и его компонентов будут описаны ниже.
Что касается описанной конфигурации трансмиссии и моторов, используемых для запястного шарнира 28' и исполнительного блока 30, возможно использовать также другие конфигурации, например, кабеля и шкивы как средства трансмиссии или компактные узлы передаточный механизм - мотор - тормоз с моментными двигателями. Однако кабеля и шкивы в качестве средства передачи более сложны в осуществлении и техническом обслуживании, при этом основанные на моментных двигателях узлы, в целом, менее компактны. Ради безопасности описанной системы были выбраны сервоприводы, которые имеют функцию динамического тормоза для того, чтобы позволить останов моторов 51, 61, 71, 81, 101, 141 в случае аварийного останова. Наружная крышка робота-манипулятора 14 выполнена из подходящего моющегося пластика и возможно отчасти из алюминия, но все наружные проводящие части подсоединены к электрическому заземлению. Все наружные компоненты экранированы от воздействия электромагнитных помех в отношении приема и излучения. В отношении стерилизации в операционном зале, как правило, используется стерильный пластиковый мешок для полного закрытия робота-манипулятора 14, т.е. от исполнительного блока 30 до основания 24.
В отношении привода в действия, описанная выше конструкция робота-манипулятора 14 представляет два других преимущества. Во-первых, сочленения робота-манипулятора 14 могут приводиться в действие вручную, за исключением сочленения J1, поскольку оно имеет высокостатическое трение и обратную инерцию. Другими словами, когда все тормоза расцеплены, прикрепленный к запястному шарниру 28 на патроне 32 исполнительный блок 30 может сдвигаться вручную посредством ручного привода сочленений J2, J3, J4, J5 и J6, требующих толкающее усилие всего лишь менее 5 кг (в горизонтальном направлении). Во-вторых, избыточностью датчиков увеличивается безопасность системы. Как описано выше, каждое из сочленений J1-J6 имеет как кодировщик положения на валу мотора, так и дополнительный позиционный датчик (например, 65, 88, 108, 148), измеряющий эффективное выходное перемещение соответствующего сочленения. На практике, данная избыточность датчиков используется для определения неисправностей (например, проводки мотора, ремня или сервопривода).
Более того, конструкция избегает условий конца пробега на каждом из сочленений J1-J6. Конец пробега случается, когда сочленение выходит за пределы своего движения и представляет собой критическое условие, в частности, в дистанционно управляемой роботизированной хирургии, поскольку хирургу S трудно и тяжело достичь извлечения с инструментом 18, вставленным в тело пациента Р. Для того чтобы избежать условий конца пробега, призматические соединения J1, J3 руки 26 сконструированы с достаточным ходом и шарнир манипулятора J6 исполнительного блока 30 сконструирован для неограниченного вращения. В результате, чтобы избежать условия конца пробега требуется только определенная заданная первоначальная конфигурация и соблюдение установочных условий.
Фигура 16 схематически показывает трокар 200 и его внешнее относительно тела пациента Р рабочее пространство 202. Система координат опорной точки (FRF) также показана на фигуре 16 посредством декартовой системы координат (x, y, z) с осью z, ориентированной вверх приблизительно параллельно направлению гравитации. Трокар 200 обычно вводится через маленький надрез в животе пациента Р, указанный под номером 204, в брюшинную полость. Трокар 200 вместе с надрезом образует одно входное отверстие 20, как показано на фигуре 1 и 2. Для того чтобы достичь органа или места, в котором должна выполняться операция, указанная осью z', продольная ось трокара 200 вращается на шарнире в рабочем пространстве 202 вокруг первоначальной координаты опорной точки, именуемой точкой вращения 206. Другими словами, данная исходная точка определяет опорную точку для трокара 200. Опорная точка в предпочитаемом варианте осуществления изобретения определяется между брюшной стенкой и кожей пациента Р, в месте минимального сопротивления наклону, для того чтобы снизить риск выдергивания трокара 200.
Следующая максимальная сила и диапазон крутящих моментов были зарегистрированы путем эксперимента на датчике силомоментного очувствления с 6 степенями свободы, установленном на ручке модифицированного лапароскопического инструмента (см. «Характеристики хирургического инструмента сила / момент - оценка хирургических навыков в минимальной инвазивной хирургии». Дж. Розен и др. / «Surgeon - Toll Force / Torque Signatures - Evaluation of Surgical Skills in Minimally Invasive Surgery» by J.Rosen et al - Отчеты медицинских встреч Виртуальная реальность, MMVR-7, IOS Press, Сан-Франциско, Калифорния, январь 1999 г.) / Proceedings of Medicine Meets Virtual Reality, MMVR-7, IOS Press, San Francissco, CA, January 1999):
Силы: Fx, Fy=±10H; Fz=±30H;
Моменты: Mx, My=±1 Нм; Mz=±0.1 Нм.
При этом Fi представляет силу по соответствующей оси i=x, y или z, a Mi представляет момент вокруг соответствующей оси i=x, y или z координаты опорной точки на фигуре 16. Рабочие диапазоны датчика силомоментного очувствления в ДУКУ 122 должны учитывать эти величины плюс вес ПЛИ 120, динамические нагрузки движения и сопротивление вращению и погружению, оказываемое на трокар 200. На практике, датчик силомоментного очувствления в ДУКУ 122 используется для отражения силы / момента, т.е. ответной реакции на силу / момент на тактильном интерфейсе, управляемом хирургом S, для ручного привода исполнительного блока 30, используя ДУКУ 122 в качестве джойстика, и для контроля сил / моментов, взаимодействующих с инструментом 18, подсоединенным к исполнительному блоку 30, например силы / моменты на кончике инструмента 18 или в точке 206 поворота на фигуре 4. Линейный и радиальный акселерометр в ДУКУ 122 используют для компенсации влияния гравитации и ускорения на информацию датчика силомоментного очувствления. Измерительные оси акселерометра и датчика силомоментного очувствления в ДУКУ 122 геометрически совпадают.
Во время операции лапароскопический инструмент 18 вставляется через трокар 200. В большинстве хирургических процедур хирург S управляет инструментом 18 в пределах следующих максимальных диапазонов углового рабочего пространства и скорости вокруг координаты опорной точки фигуры 16.
В конструкции и конфигурации некоторых прототипов роботов-манипуляторов точка поворота трокара 200 остается фиксированной после установки запястного шарнира благодаря механическому устройству конструкции запястного шарнира, которая поворачивается вокруг фиксированной точки (см. например: "Дистанционный центр степени свободы робота". Тейлор и др. / "Remote center of motion body", Taylor et al., патент США №5667323 - май 1995 г.). Другие прототипы конструкций обеспечивают механическое согласование по осям поворота для того, чтобы ограничить прилагаемые на трокар усилия (см. например: "Медицинские роботизированные системы". Вонг и др. / "Medical robotic system" by Wang et al. - патент США №6102850, август 2000 г.). В противоположность этому, предложенный здесь робот-манипулятор 14 сконструирован без механического согласования и без центра движения, но основывается на точной расчетной траектории движения вокруг точки поворота 206, определяемой конкретной процедурой, и на управлении в реальном времени силами и моментами, прилагаемыми к исполнительному блоку 30 для того, чтобы оптимизировать местонахождение точки вращения 206. Более того, данная процедура придает гибкость параллельному перемещению точки поворота 206, если потребуется хирургом S, для того чтобы улучшить внутрибрюшинную рабочую область. Другим преимуществом является способность приспосабливаться к изменениям абсолютного местоположения точки поворота 206 в силу, например, потери внутрибрюшного давления.
Очевидно, что робот-манипулятор 14 должен иметь определенные способности движения для того, чтобы придать исполнительному блоку 30 манипуляционные возможности, сравнимые с ручным управлением хирургом лапароскопическими инструментами. Основываясь на условиях движения, данных в таблице 1, кинематические возможности, которые были найдены для сочленений J1 - J6 в данном конкретном примере, подытожены в таблице 2. Углы вращения, наклона и отклонения могут быть определены относительно абсолютной системы координат, например на опорной точке.
В плане возможностей скорости и ускорения для соответствующего сочленения данные в таблице 1 величины относительно высоки и требуют поэтому мощные приводы, жесткие конструкции руки 26 и запястного шарнира 28 и соответствующее крепление к полу с помощью основания 24. Очевидно, что могут быть выбраны низкие величины, которые ведут к снижению требований, но это происходит за счет сниженной динамики на точке поворота 206.
Другим уместным аспектом, особенно в дистанционно управляемой роботизированной хирургии с отражением усилия, является требование к точности для манипулятора 14. Достаточная точность способствует снижению напряжения на трокарном разрезе и позволяет выполнять точную компенсацию силы / момента.
В выбранной конструкции, статическая точность манипулятора 14 у подсоединения к исполнительному блоку 30, т.е. у патрона 32 инструмента (см. фигуру 4) должна быть лучше, чем ±2 мм для положения ±0.1° для ориентации на координате опорной точки (см. фигуру 16). При этом предполагается внешняя нагрузка в 1,5 кг на кончике подсоединенного лапароскопического инструмента 18, а координата опорной точки предполагается на расстоянии 280 мм от оси (R) сочленения J5. Динамическая точность должна быть лучше, чем ±4 мм для положения и ±0.5° для ориентации на координате опорной точки. Данные характеристики получают, среди прочего, посредством точной механической машинной обработки частей конструкции, жесткости штанг L1-L6 и сочленений J1-J6, достаточного разрешения позиционных датчиков, должной настройки цепи управления мотором идентификатора процесса, кинематической калибровки и т.п.
В данном контексте вышеупомянутый датчик абсолютного отсчета (например, 65, 88, 108, 148), предусмотренный на выходе каждого сочленения J1-J6, обеспечивает следующие преимущества:
парковка сочленений J1-J6 робота-манипулятора 14 без приведения в движение сочленений; это означает, что первоначальная величина инкрементных датчиков, использованных для контроля моторов, обеспечивается абсолютными датчиками. Если абсолютные датчики были бы недоступны, процедура парковки могла бы быть осуществлена перемещением каждого сочленения в заданном направлении для поиска эталонного сигнала. Парковка без использования автоматических перемещений на начальную точку гарантирует быструю установочную процедуру и улучшенную безопасность;
- определение позиции и ориентации исполнительного блока 30 в реальном времени, избегая ошибки коэффициента гибкости сочленения, вызванной передаточным механизмом;
- контроль отклонений робота-манипулятора 14 от координаты опорной точки;
- обнаружение неисправности трансмиссии сочленений (например, обрыв ремня) или другие неисправности аппаратного оборудования путем мониторинга правильности данных, используя позиции, указанные соответствующим кодировщиком мотора, предусмотренного на каждом сочленении J1-J6.
Другим аспектом в робототехнике является математическая модель, используемая для контроля робота-манипулятора 14. Отклоняясь от теоретической модели робота-манипулятора 14, эффективная и точная "конкретная" модель, включающая такие параметры, как смещение к кинематической схеме, гибкость сочленений J1-J6, гибкость штанг L1-L7, обратный откат приводов и другие погрешности вследствие нелинейности, непременно определяется во время калибровочного процесса. Определенная "конкретная" модель манипулятора используется в трех целях. Во-первых, чтобы улучшить точность робота-манипулятора 14, используя теоретическую модель в устройстве позиционного управления (которое упрощает вычисления обратной задачи кинематики) с реальными смещениями сочленения и длинами штанг. Во-вторых, чтобы точно рассчитать в реальном времени посредством упреждающих формулировок позицию и ориентацию ДУКУ 122 с 6 степенями свободы и прилагаемые нагрузки (данные величины необходимы для компенсации нагрузок гравитации и ускорения). В-третьих, чтобы определить в реальном времени посредством упреждающих формулировок расположение и ориентацию кончика инструмента и вывести параметры, необходимые для отражения усилия (например, проникновение инструмента 18).
Следующие абзацы дают более подробное описание привода лапароскопического инструмента (ПЛИ) 120.
Как видно на фигуре 14 и 15, ПЛИ 120 образует часть исполнительного блока 30. ПЛИ 120 обеспечивает типичный интерфейс приведения в действие для использования стандартных лапароскопических инструментов, таких как пинцет, зажим/скальпель, ножницы, инструменты отсоса/промывания и т.п., с помощью робота-манипулятора 14. Таким образом, ПЛИ 120 образует концевую часть манипулятора 14 и представляет часть его руки, так как он производит действие руки хирурга. ПЛИ 120 содержит корпус 154, задний торец которого образует стыковочный фланец 156 для подсоединения к ДУКУ 122, в то время как его передний конец образует оконечность робота-манипулятора 14. В другой конфигурации исполнительного блока ПЛИ мог бы включать в себя сочленение J6. Данная конфигурация требует, однако, более сложной механической конструкции переходника инструмента, который должен включать в себя механизм вращения вместе с механизмом открытия/закрытия и передачи мощности. В дополнение, должно поддерживаться агенезическое поле даже в механизме вращения.
Показанный на фигурах 14-15 и 18-22 ПЛИ 120 приспособлен для использования с любыми стандартными лапароскопическими инструментами, которые могут подразделяться на инструменты с ручкой на одной стороне и с хвостовиком на другой стороне. При этом хвостовик определен как сравнительно тонкая вытянутая трубка, имеющая на своем кончике, например, вставки пинцета/ножниц, средства отсоса/промывки, основные инструменты, такие как нож или электрические устройства прижигания или разрезания. Противоположный кончику конец имеет гнездо, которое спроектировано для подсоединения хвостовика к рукоятке, используемой хирургом.
Совместимость робота-манипулятора 14 со стандартным инструментом достигается разработкой привода лапароскопического инструмента (ПЛИ) 120 и разработкой соответствующих переходников хвостовиков инструмента, далее упоминаемых под аббревиатурой ISA, пример которых показан на виде с частичным сечением фигуры 17.
Фигура 17 показывает ISA (переходник хвостовика инструмента) 300, к которому может подсоединяться хвостовик 302 инструмента. Переходник хвостовика 300 инструмента (ISA) подсоединяют к приводу лапароскопического инструмента 120 путем его монтажа в показанном на фигуре 15 гнезде 130. Для этой цели переходник хвостовика 300 инструмента содержит корпус 303 с внешней цилиндрической поверхностью. Как видно на фигуре 17, переходник хвостовика 300 инструмента разработан как элемент сцепления между хвостовиком 302 инструмента обычного (лапароскопического) инструмента и привода 120 лапароскопического инструмента. Для этой цели, переходник 300 хвостовика инструмента содержит разъем 304 хвостовика на его передней стороне. Разъем 304 хвостовика разработан для подсоединения к гнезду 306 специального типа хвостовика 302, который зависит от фактического инструмента. Первоначально, гнездо 306 разработано для подсоединения к рукоятке лапароскопического инструмента (не показан). Как видно на фигуре 17, разъем 304 хвостовика воспроизводит разъем оригинальной рукоятки, для которой был разработан хвостовик 302. Переходник 300 хвостовика инструмента далее содержит средство сцепления, элемент сцепления 308 для надежного подсоединения к приводу 120 лапароскопического инструмента. Элемент сцепления 308 размещается сбоку на корпусе 303 и выступает по радиусу так, чтобы блокировать вращение переходника 300 хвостовика инструмента, когда он крепится к приводу 120 лапароскопического инструмента. Маленький металлический блок 309 включен в элемент 308 сцепления для того, чтобы обеспечить металлическую воспринимающую поверхность детектора для индуктивного переключателя присутствия (для сравнения часть 404, описанная ниже) привода 120 лапароскопического инструмента. Линейно скользящий плунжер 310 размещен в цилиндрической направляющей 312, направленной вовнутрь переходника 300 хвостовика инструмента. Цилиндрический скользящий штифт 314 вставлен поперечно плунжеру 310 и выступает из корпуса 303 для управления плунжером 310. Скольжение плунжера 310 приводит в действие стержень внутри хвостовика 302 инструмента для управления инструментом на кончике хвостовика 302. Как станет понятно, переходник 300 хвостовика инструмента воспроизводит функцию первоначально подсоединенной к хвостовику 302 рукоятки в отношении работы хвостовика 302 инструмента, в то же время обеспечивая вместе с приводом 120 лапароскопического инструмента интерфейс подсоединения к роботу-манипулятору 14. Станет понятно, что показанный на фигуре 17 конкретный вариант осуществления изобретения переходника 300 хвостовика инструмента разработан для инструмента, требующего механического привода, такого как функция открытия/закрытия для кончика инструмента, например ножницы и зажим с или без однополюсным или двухполюсным электромеханическим приводом. Разнообразие других типов аналогичных переходников также охвачено настоящим описанием, при этом каждый переходник приспособлен к определенному типу лапароскопического инструмента, т.е. специфическому типу хвостовика (например, 302), который должен подсоединяться к приводу 120 лапароскопического инструмента. Соответственно, переходник хвостовика инструмента содержит, в зависимости от требований инструмента, цилиндрический скользящий штифт 314, например, для приведения в действие зажима инструмента, одного или более электрических штекеров 318, например, для однополярного или двухполярного привода прижигающего устройства и т.п. и/или одного или более подсоединения(ий) трубопровода, например, для инструментов промывки или отсоса. Хотя на фигуре 17 показаны электрические штекеры 318, станет понятным, что для чисто механического инструмента 18 нет необходимости предусматривать части переходника 300 хвостовика инструмента, образующие электрические штекеры 18 (показанные тонкой линией на фигуре 17). Стоит отметить, что материал компонентов любого типа переходников хвостовика инструмента должен выбираться так, чтобы его можно было стерилизовать, например, в автоклаве. Фактически, благодаря конструкции привода лапароскопического инструмента 120, переходник хвостовика инструмента является единственной частью механической роботизированной системы 10, которую необходимо стерилизовать (кроме шпинделей инструмента конечно). Во время операции корпус 154 привода 120 лапароскопического инструмента и другие части исполнительного блока 30 закрываются пластиковым стерильным мешком. Хотя не показано, это очевидно, что для механически не действующих, но приводимых в действие электричеством инструментов, таких как электроскальпель или ножи, переходнику хвостовика инструмента не обязательно иметь скользящий штифт 314 и связанную с ним механическую передачу. Для таких инструментов, как трубка промывки или отсоса, переходник хвостовика инструмента оснащен двумя трубками, которые управляются дистанционно посредством электроклапана, электрически приводимого в действие системой управления роботом.
Показанный на фигуре 18 привод лапароскопического инструмента 120 сконструирован в облегченном исполнении (например, менее чем 800 г общего веса) и для того, чтобы подходить к сравнительно малой цилиндрической оболочке около 90 мм или в предпочитаемом варианте осуществления изобретения 75 мм диаметром для того, чтобы увеличить доступное рабочее место двух смежных инструментов с расположенными поблизости входными отверстиями 20. Общая длина привода 120 лапароскопического инструмента (около 130 мм в частном примере) главным образом определяется длиной переходника 300 хвостовика инструмента. Длина привода лапароскопического инструмента 120 сведена до минимума для того, чтобы ограничить расстояние между осью вращения сочленения J5 и точкой 206 поворота координаты опорной точки (см. фигуру 17). Фактически, данное расстояние смещения определяется для диапазона хода и возможностей скорости/ускорения всех сочленений манипулятора J1-J5. Однако рекомендуется, чтобы длина привода 120 лапароскопического инструмента была не менее 6 см для того, чтобы позволить захват привода лапароскопического инструмента рукой в ручном режиме (т.е. используя подсоединенный к ДУКУ 122 корпус 154 в качестве джойстика).
Как видно на фигуре 18, внешняя поверхность корпуса 154 имеет сглаженные кромки. Она выполнена из легко моющегося, легкого и непроводящего электричество материала. Более того, привод 120 лапароскопического инструмента имеет частично вращательно-симметричную конструкцию относительно хвостовика 302 подходящего инструмента 18, установленного с использованием переходника 300 хвостовика инструмента. Когда переходник 300 хвостовика инструмента как следует подсоединен к приводу 120 лапароскопического инструмента, ось хвостовика 302 совпадает с осью вращения сочленения J6 и с вертикальной осью ДУКУ 122.
Как видно далее на фигуре 18, корпус 154 привода 120 лапароскопического инструмента содержит линейное исполнительное устройство 400 для приведения в действие установленного посредством переходника 300 хвостовика инструмента инструмента 18, как будет подробно описано ниже. Гнездо 130 образовано в виде вогнутого, вытянутого, полуцилиндрического углубления на поверхности 401 доступа привода 120 лапароскопического инструмента для облегчения вставки и выемки переходника 300 хвостовика инструмента. Гнездо 130 для приема переходника 300 хвостовика инструмента расположено приблизительно на одной оси с осью вращения сочленения J6 и простирается вдоль центральной оси корпуса 154. Как станет понятно, направление установки и выемки переходника 300 хвостовика инструмента относительно привода 120 лапароскопического инструмента является радиальным по отношению к оси вращения сочленения J6. Привод 120 лапароскопического инструмента конфигурируется так, что гнездо 130 является достижимым со всей половины плоскости над поверхностью 401 доступа. Как видно на фигуре 18, гнездо 130 содержит продольную канавку 402, которая радиально углубляет гнездо 130 в корпус привода 120 лапароскопического инструмента. Дополнительная канавка 402 выполнена для приема элемента 308 сцепления переходника 300 хвостовика инструмента. Зацепляющая часть взаимосвязанного с гнездом 130 запорного механизма 406 размещена в канавке 402 и взаимодействует с элементом 308 сцепления. Гнездо 130 образовано в виде полуцилиндрического углубления с округленным торцевым участком, находящимся в соответствии с формой внешнего цилиндра корпуса 303 переходника 300 хвостовика инструмента. Детектор присутствия 404, например индуктивный переключатель присутствия, размещен в гнезде 130 для обнаружения присутствия переходника 300 хвостовика инструмента путем обнаружения металлического блока 309 (см. фигуру 17). Срабатывающая в случае неработоспособности оператора кнопка 408 переключателя позволяет переключение системы управления робота-манипулятора 14 в ручной режим. В ручном режиме привод 120 лапароскопического инструмента (и, если подсоединен, инструмент 18) позиционируется и ориентируется роботом-манипулятором 14, используя информацию, выданную отвечающим за корпус 154 привода 120 лапароскопического инструмента ассистентом, и считываемую ДУКУ 122. Ручной режим удобен, прежде всего, для введения и извлечения инструмента через трокар.
Подробности линейного исполнительного устройства 400 лучше всего видно на фигуре 20. Исполнительное устройство 400 содержит подсоединенный через передаточный механизм 412 миниатюрный бесщеточный мотор 411 и шкивы 414 и 416, которые находятся в сцеплении ремнем 418 с валом 420 с шаровым и винтовым соединениями. Вал 420 с шаровым и винтовым соединениями взаимодействует с гайкой 422, размещенной на ней так, чтобы преобразовать вращение в линейное движение, как показано на фигуре 19. Гайка 422 направляется линейной направляющей 424 для того, чтобы снизить поперечные усилия на валу 420 с шаровым и винтовым соединениями. Бесконтактные конечные выключатели 426 и 428 размещены в местах конца хода гайки 422 и соединены с блоком управления для ограничения хода исполнительного устройства 400.
Как видно на фигуре 19, исполнительное устройство 400 сообщает линейное движение скользящей каретке 430 привода 120 лапароскопического инструмента, как будет подробно описано ниже. В предпочитаемом варианте осуществления изобретения были выбраны следующие параметры для исполнительного устройства 400:
- максимальный механический ход скользящей каретки 430: 7 мм (как правило, 5 мм достаточно для стандартных инструментов, но было обнаружено, что несколько хвостовиков того же самого типа могут иметь длину хода, изменяющуюся до 2 мм);
- диапазон скорости хода: от 1 мм/с до 20 мм/с;
- максимальное усилие срабатывания: 200Н.
Шаговые двигатели не желательны в приводе 120 лапароскопического инструмента, поскольку они производят вибрацию, которая рассматривается как источник шума для ДУКУ 122. Поэтому используется миниатюрный бесщеточный мотор с преобразователем вал - число. Такие моторы имеются, например, у компании Фаулхабер ГмбХ, Щенайх, Германия (Faulhaber GmbH, Schoenaich, Germany). Однако не исключаются другие невибрирующие механизмы поступательного движения, такие как передача с канатным приводом.
Фигура 20 показывает блок 440 питания и управления для мотора 411, который вставлен в корпус 154 привода 120 лапароскопического инструмента и питается, например, от напряжения 24 В постоянного тока. Для дальнейшего сокращения диаметра корпуса 154 блок 440 питания и управления может быть размещен в дополнительном корпусе либо между фланцем 156 и ДУКУ 122, либо между ДУКУ 122 и соединительным фланцем к сочленению J6 (не показан), либо внутри крышки 124 сочленения J6, например, за коллекторным кольцом 80 рядом с мотором 141. Блок 440 питания и управления разработан, в частности, для приведения в действие скользящей каретки 430 с профилем заданной скорости в соответствии с принятыми командами на позиционирование, для ограничения тока мотора по требованию пользователя, для управления основанном на сигналах от концевых переключателей 426, 428 движением, для приведения используя концевой переключатель в парковочное положение позиции мотора 411 и для контроля детектора присутствия 404 на корпусе 154. Другие функции безопасности, например функция аварийного останова, также осуществляются с использованием сервопогрешности мотора 411, т.е. заданное положение минус эффективное положение, и термальной защиты мотора 411. Для того чтобы сократить необходимое пространство для привода 120 лапароскопического инструмента, линейное исполнительное устройство 400 не оснащают датчиком абсолютного отсчета. Тем не менее автоматизированная процедура парковки гарантируется путем использования концевых переключателей 426 и 428 в качестве датчиков исходного положения. Во время работы абсолютное положение скользящей каретки 430 может периодически записываться, например, в подходящую память системы управления робота для быстрого восстановления системы после отключения напряжения или неисправности. Наличие переходника 300 хвостовика инструмента, т.е. правильно ли он прикреплен к приводу 120 лапароскопического инструмента, определяется с помощью размещенного в гнезде 130 индуктивного переключателя 404 присутствия (см. фигуру 18). Выход индуктивного переключателя 404 присутствия запитан на доступный вход блока 440 управления.
Как лучше всего видно на фигуре 17 и 19, скользящая каретка 430 исполнительного устройства 400 приспособлена принимать скользящий штифт 314 переходника 300 хвостовика инструмента. При работе мотора 411 скользящая каретка 430 перемещается так, чтобы приводить в движение скользящий штифт 314 подсоединенного переходника 300 хвостовика инструмента. Скользящий штифт 314, в свою очередь, приводит в действие плунжер 310 для управления рабочего элемента или инструмента на кончике хвостовика 302 (не показан), например механизма открытия/закрытия зажима. Другими словами, сочетание исполнительного линейного устройства 400 и переходника 300 хвостовика инструмента симулирует действие рукоятки, которая была удалена с хвостовика 302 и заменена на переходник 300 хвостовика инструмента. Вставка скользящего штифта 314 в скользящую каретку 430 облегчается направляющей поверхностью со скошенной кромкой 434.
Фигуры 21 и 22 подробно показывают конфигурацию запорного механизма 406 привода 120 лапароскопического инструмента, показанного на фигуре 18 только частично. Запорный механизм 406 выполнен в виде запора и содержит скользящую собачку 450, размещенную в канавке 402 (показана на фигуре 18) гнезда 130. Становится понятным, что собачка 450 направляется подходящим устройством в канавке 402. Канавка 402 вместе со скользящей собачкой 450 выполнена для принятия методом зацепления показанного на фигуре 17 элемента сцепления 308 переходника 300 хвостовика инструмента. Собачка 450 содержит два конца 452 для зацепления двух выступов 316, образованных пазами в элементе сцепления 308 (см. фигуру 17). Кромки элемента сцепления 308 округлены для того, чтобы облегчить вставку в канавку и выемку из канавки 402.
Конструкция собачки 450 лучше всего видна на фигуре 22. Пружина 454 гибко смещает собачку 405 по направлению к ДУКУ 122. Линейно направляемая выпуклость 456 позволяет вращать шарнир 458, который присоединен к линейно направляемой собачке 450 для того, чтобы вручную расцеплять собачку 450 от элемента сцепления 308, когда необходимо убрать переходник 300 хвостовика инструмента. Концы 452 собачки 450 имеют снятую фаску так, чтобы позволить вставку переходника 300 хвостовика инструмента простым нажатием. Зацепляющий участок концов 452 и выступов 316 округлен в соответствии с сопрягаемым профилем для того, чтобы оградить от повреждения стерильный пластик, используемый для покрытия привода 120 лапароскопического инструмента. Также становится понятным, что другие эквиваленты сцепляющего или запорного механизмов могли бы также быть использованы, например, путем использования постоянного магнита, установленного в привод лапароскопического инструмента с металлическими пластинами, и кулачковым рычагом, установленным на переходник хвостовика инструмента, для замены запорного механизма. Желательно, чтобы механизм крепления, например запорный механизм 406, и элемент 308 сцепления были сконструированы с обеспечением того, чтобы переходник 300 хвостовика инструмента, когда крепится к приводу 120 лапароскопического инструмента, мог противостоять следующим усилиям и моментам без отсоединения от привода 120 лапароскопического инструмента:
- сила тяги и сила сжатия 100 Н;
- крутящие моменты, соответствующие радиальным силам 15 Н на кончике инструмента;
- изгибающий момент до 5 Нм.
Становится понятным, что привод 120 лапароскопического инструмента и каждый взаимодействующий переходник хвостовика инструмента (например, 300) разработаны для быстрой и легкой ручной установки и снятия подходящего лапароскопического инструмента 18, т.е. хвостовик (например, 302), собранный с переходником хвостовика инструмента (например, 300), ассистентом хирурга А. По существу цилиндрическая наружная форма переходника 300 хвостовика инструмента, его элемент сцепления 308, гнездо 130, канавка 402 и запорный механизм 406, как описано выше, предусматривают вставку с помощью направляющей и простую процедуру подсоединения переходника 300 хвостовика инструмента к приводу 120 лапароскопического инструмента. Когда переходник хвостовика инструмента вставлен, конструкция гарантирует необходимую жесткость и простую процедуру выемки с помощью нескольких движений руки. С помощью данной конструкции вставка и выемка инструмента 18 (т.е. хвостовика и переходника хвостовика инструмента) может выполняться так быстро, как при ручных хирургических операциях, при которых ассистент заменяет обычный инструмент для хирурга за 6-9 секунд.
Следует отметить, что вставка или выемка инструмента 18, содержащего переходник хвостовика инструмента (например, 300) и хвостовик (например, 302), может безопасно выполняться в обоих случаях, когда инструмент находится снаружи тела пациента Р или когда инструмент вставлен в тело пациента Р. Также, можно выполнить выемку, пока скользящий штифт 314 находится в приводном состоянии.
Перед установкой инструмента в привод 120 лапароскопического инструмента должно соблюдаться несколько предварительных условий. Во-первых, если инструмент частично вставлен в трокар (не превышая длину трокара), привод 120 лапароскопического инструмента должен быть предварительно расположен и сориентирован по манипулятору 14 в жесткое положение, которое совмещает ось вращения исполнительного блока 30 (сочленение J6) с трокаром. Во-вторых, скользящая каретка 430 должна помещаться в "исходное положение вставки" с помощью системы управления роботом, например ближайшее положение к стыковочному фланцу 156. Когда переходник хвостовика инструмента (например, 300) вынимается, скользящая каретка 430 должна автоматически сдвигаться в данное "исходное положение вставки" с помощью системы управления роботом. Как упоминалось выше, присутствие, отсутствие или ненормальное расцепление переходника хвостовика инструмента может быть обнаружено детектором присутствия 404. В-третьих, и если имеется, скользящий штифт (например, 314) переходника хвостовика инструмента (например, 300) должен соответствовать в "исходном положении вставки" тому положению, в котором находится скользящая каретка 430. Данная позиция скользящего штифта 314 предпочтительно определяется так, что инструмент находится в "закрытой" конфигурации, например в данном положении зажимы инструмента пинцета/ножниц свободно, но достаточно закрыты.
Как лучше всего проиллюстрировано на фигуре 14, процедура вставки подходящего лапароскопического инструмента 18, включающего в себя переходник хвостовика инструмента (например, 30) и хвостовик (например, 302), может выполняться простым движением руки в соответствии со стрелкой 460 и включать в себя размещение переходника хвостовика инструмента (например, 300) на его гнезде 130 и легкое нажатие на переходник хвостовика инструмента вдоль того же направления для того, чтобы зацепить элемент сцепления 308 с запорным механизмом 406. Детектор 404 присутствия выдает положительный сигнал, когда элемент 308 сцепления правильно установлен в канавке 402. Во время данной процедуры вставки, скользящая каретка 430 зацепляет скользящий штифт 314 без необходимости дальнейших проверок в отношении того, были ли выполнены все вышеупомянутые условия.
Когда хирург S через главную панель управления 15 требует замену инструмента, автоматически системой управления роботом обычно выполняются четыре операции. Во-первых, система управления роботом контролирует инструмент 18, чтобы освободить все ткани. Во-вторых, она сдвигает инструмент ближе к отверстию трокара, следуя направлению оси инструмента. В-третьих, кончик инструмента, например зажим инструмента, приводится в состояние, которое предотвращает зацепление кончика за трокар. В-четвертых, она отсоединяет мотор сочленения J6 так, что ассистент хирурга А может свободно вращать привод лапароскопического инструмента 120 для того, чтобы облегчить выемку инструмента из привода 120 лапароскопического инструмента. После этих операций выемка вставленного лапароскопического инструмента 18 может быть безопасно выполнена в любое время двумя простыми движениями.
Первое движение выемки включает нажатие на выпуклость 456 для того, чтобы разомкнуть запорный механизм 406. Второе движение выемки заключается в повороте переходника хвостовика инструмента (например, 300) и хвостовика (например, 302) вокруг кончика хвостовика путем поворота вокруг оси/ перпендикулярной оси хвостовика для того, чтобы вынуть их обоих из гнезда 130 и, следовательно, если он все еще вставлен для того, чтобы вынуть хвостовик (например, 302) из тела пациента Р.
Как очевидно из вышеописанной процедуры вставки и выемки, конструкция привода 120 лапароскопического инструмента и переходника хвостовика инструмента (например, 300) позволяет вставку или выемку инструмента даже тогда, когда хвостовик (например, 302) присоединенного инструмента 18 все еще частично вставлен в тело пациента Р через трокар 200 (см. фигуру 16). Как становится понятно, необходимые для выемки движения направлены не в направлении проникновения относительно пациента Р, поскольку они состоят из наклонного движения, перпендикулярного продольной оси гнезда 130, и последующего движения выемки. Более того, в случае когда движение в данном наклонном направлении может принести вред пациенту, это направление может быть изменено поворотом привода 120 лапароскопического инструмента с помощью ручного привода лапароскопического инструмента через сочленение J6. Дополнительно, в случае отсутствия электроэнергии переходник хвостовика инструмента (например, 300) вместе с хвостовиком (например, 302) могут ослабляться и выниматься вручную.
В отношении описанного выше привода лапароскопического инструмента очевидно, что в роботизированной системе 10 посредством простых переходников хвостовика инструмента (ISA) (например, 300) может использоваться широкое разнообразие существующих стандартных лапароскопических инструментов. Привод 120 лапароскопического инструмента в сочетании с соответствующим переходником хвостовика инструмента заменяет ручную часть данного лапароскопического инструмента без потерь возможностей приведения в действие или подвода питания. Привод 120 лапароскопического инструмента сконструирован типично, т.е. независимо от типа инструмента, который должен вставляться в робот-манипулятор 14. Следовательно, только переходник хвостовика инструмента (например, 300) должен быть разработан специально в соответствии с требованиями инструмента. Как описано выше, привод лапароскопического инструмента 120 способен обеспечивать, помимо прочего, следующие функции:
активизация "открытия/закрытия» кончика инструмента, например зажимов инструмента, используя линейное исполнительное устройство 400;
подгонка требуемой длины хода "открытия/закрытия" для каждого типа инструмента;
работа с неприводными инструментами, такими как ножи, посредством действия робота-манипулятора 14.
Более того, привод лапароскопического инструмента позволяет существенную экономию в роботизированной лапароскопии в силу нескольких факторов. Во-первых, в противоположность известным из уровня техники устройствам, которые требуют несколько приводов на манипулятор в силу того, что инструмент и связанный с ним привод собраны в виде одного блока в едином корпусе, для каждого манипулятора 14 необходим только один привод лапароскопического инструмента. Это позволяет сэкономить, помимо всего прочего, на стоимости привода. Во-вторых, при использовании хвостовика (например, 302) стандартных лапароскопических инструментов и соответствующих переходников хвостовика (например, 300) простой конструкции снижается стоимость инструмента. Поэтому стоимость применяемого инструмента 18 для использования с приводом лапароскопического инструмента 120 практически идентична стоимости стандартного ручного лапароскопического инструмента (т.е. ручного). В-третьих, стоимость технического обслуживания инструмента равна стоимости стандартного лапароскопического инструмента, поскольку конструкция переходника хвостовика инструмента (например, 300) устойчива к циклам стерилизации.
Возвращаясь к фигуре 25, будет описан альтернативный вариант осуществления изобретения привода 1120 лапароскопического инструмента. Поскольку многие описанные выше аспекты и преимущества привода лапароскопического инструмента также распространяются на привод лапароскопического инструмента 1120, то ниже подробно будут изложены только основные признаки и различия.
Показанный на фигуре 25 привод лапароскопического инструмента 1120 имеет полуцилиндрический корпус 1154, который имеет верхнюю, по существу плоскую поверхность 1401 доступа для облегчения установки и выемки переходника хвостовика инструмента из привода лапароскопического инструмента 1120. Противоположная поверхность 1155 корпуса 1154 является полуцилиндрической в соответствии с цилиндрической оболочкой, которая совмещается с осью вращения J6. Диаметр полуцилиндрической поверхности 1155 выбирается эргономично для того, чтобы позволить оператору работать с ним, например, в диапазоне 50-135 мм, желательно около 90 мм, особенно для управления роботизированным манипулятором 14 в ручном режиме. Поскольку полуцилиндрический корпус имеет значительно меньшее сечение, чем стыковочный фланец 156, с помощью которого привод 1120 лапароскопического инструмента крепится к ДУКУ 122, корпус 1154 далее включает закругленные ребра жесткости 1157. Ребра жесткости имеют закругленную, т.е. плавно увеличивающуюся форму, начиная от поверхности доступа 1401 до верхней кромки стыковочного фланца 156. Ребра жесткости 1157 далее изгибаются в соответствии с цилиндрической оболочкой полуцилиндрической поверхности 1155. Ребра жесткости 1157 соединяют поверхность доступа 1401 со стыковочным фланцем 156 и, таким образом, усиливают и увеличивают жесткость крепления корпуса 1154 к стыковочному фланцу 156. Следовательно, ребра жесткости 1157 гарантируют более точную передачу усилий и моментов от переходника хвостовика инструмента через привод лапароскопического инструмента 1120 на ДУКУ 122. Можно отметить, что подобные ребра жесткости также предусмотрены в приводе лапароскопического инструмента 120, фигуры 14.
Фигура 25 далее показывает альтернативный механизм сцепления для крепления переходника хвостовика инструмента к приводу лапароскопического инструмента 1120 и, следовательно, к исполнительному блоку 30. В приводе 1120 лапароскопического инструмента, как и в приводе 120 лапароскопического инструмента, гнездо 1130 образовано в виде вогнутого, вытянутого, полуцилиндрического углубления в поверхности доступа 1401 для того, чтобы обеспечить самоцентрирование переходника на оси вращения J6. Более того, механизм сцепления содержит множество магнитных устройств 1423, два на стороне скользящей каретки 1430 и одно на другой стороне гнезда 1130, при этом последний размещен на выступающем из поверхности доступа 1401 возвышении 1425. Возвышение 1425 обеспечивает дополнительное сдерживающее ограничение в осевом направлении к прикрепленному переходнику и позволяет саморегулирование позиции в осевом направлении переходника с помощью уклонов к поверхности доступа 1401. Как становится понятным, магнитные устройства 1423, которые могут быть электромагнитами, постоянными магнитами или их сочетанием, гарантируют прикрепление соответственного сконструированного переходника хвостовика инструмента посредством магнитного притяжения. Избегая механического защелкивания, крепление устраняет риск повреждения стерильного покровного пластика, использованного для обертывания манипулятора 14 или, по меньшей мере, исполнительного блока 30.
Фигура 25 иллюстрирует множество индуктивных датчиков 1431 присутствия для идентификации прикрепленного к исполнительному блоку 30 инструмента посредством индуктивно идентифицируемого образа материала на переходнике хвостовика инструмента. Четыре индуктивных датчика 1431 присутствия размещены в ряд и позволяют различать и идентифицировать типы инструментов при использовании двоичного кода (4-битовое слово), основываясь на присутствии или отсутствии проводникового материала в ряду соответствующих местоположений на переходнике хвостовика инструмента, обращенного к индуктивным датчикам присутствия 1431. Более того, индуктивные датчики присутствия 1431 также позволяют определение присутствия, если для этой цели используется код образа (4-битовое слово), соответствующий отсутствующему инструменту, т.е. когда нет проводящего материала, обращенного к какому-либо индуктивному датчику 1431.
Элемент сцепления 1433 отдельно показан на фигуре 25. Элемент сцепления 1433 является частью исполнительного устройства, которое включает в себя скользящую каретку 1430, и имеет поверхности 1434 захвата со снятой фаской, ведущие в паз для зацепления скользящего штифта переходника хвостовика инструмента. Поверхности 1434 со снятой фаской облегчают вставку скользящего штифта 314 переходника хвостовика инструмента. Как становится понятным, элемент 1433 сцепления является съемным со скользящей каретки 1430 и выполнен из поддающегося стерилизации материала. Элемент сцепления может, следовательно, быть установлен на каретке 1430 только после того, как стерильная пленка закроет привод 1120 лапароскопического инструмента. Поскольку диапазон передвижения каретки 1430 ограничен, то она не может повредить стерильную пленку.
Фигура 26 показывает альтернативный вариант осуществления изобретения переходника 1300 хвостовика инструмента, прикрепленного к приводу 1120 лапароскопического инструмента фигуры 25. Переходник 1300 хвостовика инструмента выполнен совместимым с альтернативной конструкцией привода 1120 лапароскопического инструмента и подробно описывается ниже. Переходник 1300 хвостовика инструмента имеет такие размеры, что его основание согласовано с поверхностью 1401 доступа. Функция переходника 1300 хвостовика инструмента та же самая, что и у показанного на фигуре 17 переходника 300 хвостовика инструмента, а именно обеспечить стыковку, позволяющую использовать хвостовик 302 стандартного ручного лапароскопического инструмента на роботизированном манипуляторе 14, без потерь какой- либо функции, доступной при ручном хирургическом вмешательстве. Фигура 26 также показывает кнопку 408 переключателя, предусмотренную на приводе 1120 лапароскопического инструмента для переключения системы в ручной режим. Переходник 1300 хвостовика инструмента снабжен рычагом 1301 для легкого ручного демонтажа, т.е. отделения переходника 1300 хвостовика инструмента от привода 1120 лапароскопического инструмента. Переходник 1300 хвостовика инструмента также имеет электрический штекер 1308 для подсоединения электроприводных инструментов (например, инструменты коагулирования или разрезания) непосредственно к источнику электрического питания без проходящих через привод лапароскопического инструмента проводов.
Как очевидно из фигуры 25 и 26, конструкция является таковой, что все компоненты привода 1120 лапароскопического инструмента, включая корпус 1154, фланец 156, ребра жесткости 1157, датчиковый узел ДУКУ 122 и все части смонтированного переходника 1300 хвостовика инструмента, включая рычаг 1301, находятся в пределах цилиндрической оболочки, определенной полуцилиндрической поверхностью 1155. Это должно снизить риск столкновения и повреждения, когда привод лапароскопического инструмента вращается сочленением J6.
Фигура 27 показывает альтернативный исполнительный механизм 1400 для сообщающегося линейного движения скользящей каретки 1430, отличающийся по конструкции от механизма фигуры 19. Он содержит миниатюрный бесщеточный мотор 1411, соединенный через передаточный механизм 1412 и вал с шаровым и винтовым соединениями или червячную передачу 1420 с гаечным элементом 1422. Каретка 1430 крепится к гаечному элементу 1422 через промежуточное соединение датчика 1427 усилия. Датчик 1427 усилия позволяет измерять усилия, прилагаемые кареткой 1430 на скользящий штифт 314 и наоборот. Также становится понятным, что благодаря креплению скользящей каретки 1430 к стороне продольного гнезда 1130, мотор 1411 и передаточный механизм могут располагаться параллельно продольной оси переходника хвостовика 1300 инструмента и хвостовика 302. Это позволяет свести к минимуму общую длину привода 1120 лапароскопического инструмента, в силу чего требования к динамике привода для определенных сочленений (например, J4) снижаются. Более того, становится понятным, что данный исполнительный механизм 1400 оптимизирован в отношении образования вредной вибрации. Другие аспекты и преимущества приводного механизма 1400 подобны тем, как и у описанного выше механизма 400.
Фигура 28 показывает нижнюю сторону переходника 1300 хвостовика инструмента фигуры 26, когда он снят с привода 1120 лапароскопического инструмента. Переходник хвостовика 1300 инструмента содержит вытянутый корпус 1303 с разъемом 1304 хвостовика на переднем торце (см. фигуру 30). Разъем 1304 хвостовика позволяет съемное соединение к типу гнезда 306, прикрепленного к шпинделю 302 (показано частично) стандартного ручного лапароскопического инструмента такой же длины, что и предусмотренное съемное соединение. Конечно, разъем и гнездо могли бы соответственно размещаться на хвостовике и переходнике хвостовика инструмента. Подобно корпусу 303, корпус 1303 на своей нижней стороне имеет полуцилиндрическую поверхность для взаимодействия с гнездом 1130. Как видно на фигуре 28, боковые крылья 1305 выступают с обеих сторон корпуса 1303. Боковые крылья 1305 имеют плоскую нижнюю поверхность, которая сопрягается с поверхностью 1401 доступа на приводе 1120 лапароскопического инструмента (например, также с подъемом 1425). В одном крыле 1305 над скользящим штифтом 314 предусмотрено отсеченное пространство 1307 для обеспечения видимости и доступа, например для ручного передвижения скользящего штифта 314, когда переходник 1300 хвостовика инструмента сцеплен с приводом 1120 лапароскопического инструмента. Фигура 28 также показывает плоские ферромагнитные элементы 1311, размещенные на каждом крыле 1305 на каждой стороне корпуса 1303. Ферромагнитные элементы образуют средства сцепления, которые взаимодействует в указанном порядке с соответствующим магнитным устройством 1423 на приводе 1120 лапароскопического инструмента, как показано на фигуре 25. В области 1313, на переходнике 1300 хвостовика инструмента предусмотрен индуктивно идентифицируемый образ для идентификации с помощью показанного на фигуре 25 индуктивного датчика 1431 используемого инструмента. В данном варианте осуществления изобретения показанная на фигуре 25 цельная металлическая пластина соответствует данному 4-битному слову (например, 1111 или 0000), в то время как в других переходниках могут быть предусмотрены полости, например, путем просверливания отверстий в одном или более положениях, обращенных к индуктивным датчикам 1431 для того, чтобы задать для идентификации различные кодовые слова.
Фигура 29 показывает переходник 1300 хвостовика инструмента фигуры 28 в частично вскрытом виде. Как видно на фигуре 29, переходник 1300 хвостовика инструмента имеет внутреннюю полость, служащую в качестве цилиндрической направляющей 1312 для плунжера 310 некоторого ручного лапароскопического инструмента. Плунжер 310 обычно используется в ручном инструменте для сообщения движения от рукояти инструмента к направляемому в хвостовике 302 валу. Станет понятным, что существующий плунжер ручного инструмента может быть размещен для скольжения в направляющей 1312. Как видно на фигуре 28, в корпусе 1303 предусмотрено продолговатое сквозное отверстие 1315, позволяющее прикрепленному перпендикулярно плунжеру 310 скользящему штифту 314 выступать из корпуса 1303 и перемещаться вперед и назад в осевом направлении корпуса 1303 для управления плунжером 310. Показанный на фигуре 29 плунжер 310 является оригинальной частью ручного биполярного инструмента, используемого для обеспечения биполярного электрического питания для инструмента и для фиксации/ослабления инструмента.
Фигура 30 должна иллюстрировать, что тот же самый тип переходника может быть использован для размещения различных плунжеров, различных типов имеющихся в продаже лапароскопических инструментов для ручного хирургического вмешательства, например плунжер 1310 для монополярного ручного инструмента, как показано на фигуре 30. Отсюда следует, что переходники, такие как переходник 1300 хвостовика инструмента (или переходник 300 хвостовика инструмента) позволяют использование большей части имеющихся в продаже относительно недорогих ручных инструментов на роботизированном манипуляторе 14. Фигура 29 также показывает один из двух язычков 1317 рычага 1301 и вал 1319, на котором он поворачивается. При нажатии рычага 1301 вниз язычок 1317 поднимает нижнюю поверхность и, в частности, ферромагнитные элементы 1311 переходника 1300 хвостовика инструмента от поверхности 1401 доступа переходника 1120 хвостовика инструмента так, что переходник 1300 хвостовика инструмента может быть перемещен вручную в перпендикулярном направлении к оси вращения J6, т.е. оси хвостовика инструмента.
В дополнение к описанным выше аспектам, медицинская роботизированная система 10 имеет далее следующие признаки:
роботизированные манипуляторы 14, благодаря своей конструкции, могут быть легко и быстро отведены назад для того, чтобы позволить хирургу S доступ к операционному столу 12 или разрешить установку радиологического инструмента;
роботизированные манипуляторы 14, благодаря своей конструкции и используемой от внешнего датчика информации, могут легко приспосабливаться без значительного увеличения времени хирургического вмешательства к угловым изменениям операционного стола 12 во время хирургической операции для (анти-) положения Тренделенбурга (-/+20°-35°) или для боковой ориентации пациента;
роботизированные манипуляторы 14, благодаря своей конструкции и используемой информации от внешнего датчика, могут легко следовать изменениями позиции трокара вследствие изменения внутрибрюшного давления;
медицинская роботизированная система 10 позволяет замену инструментов за короткое время для того, чтобы свести к минимуму общее время хирургического вмешательства, конструкция привода лапароскопического инструмента 120, 1120 и робота-манипулятора 14 позволяют замену инструмента за такое же время, что и при заменах в ручных лапароскопических операциях (насчитывающее от 6 до 9 секунд); при использовании с эндоскопом конструкция робота-манипулятора 14 также позволяет быстрое извлечение эндоскопа и его переустановку, например, для чистки оптики;
медицинская роботизированная система 10 позволяет быструю и простую установку системы, включая конфигурацию множества роботизированных манипуляторов 14 вокруг операционного стола;
робот-манипулятор 14 разработан универсально для того, чтобы быть пригодным для широкого круга применений, таких как минимальная инвазивная хирургия, ортопедия, биопсия, подкожная терапия, забор кожного трансплантата, ультразвуковая диагностика и т.п.
Хотя настоящая патентная заявка относится к определенному в прилагаемой ниже в формуле изобретения изобретению, специалист без труда поймет, что настоящая заявка на патент содержит основание для формулировки других изобретений, которые могут, например, быть заявлены как объект уточненной формулы изобретения настоящей заявки или как объект формулы изобретения в выделенной и/или продолжающей заявке. Такой объект может быть охарактеризован любым признаком или комбинацией признаков, описанных в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| РОБОТИЧЕСКАЯ СИСТЕМА ДЛЯ МИНИ-ИНВАЗИВНОЙ ХИРУРГИИ | 2012 |
|
RU2491161C1 |
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ | 2010 |
|
RU2531469C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА С УСОВЕРШЕНСТВОВАННЫМ УПРАВЛЕНИЕМ | 2011 |
|
RU2569699C2 |
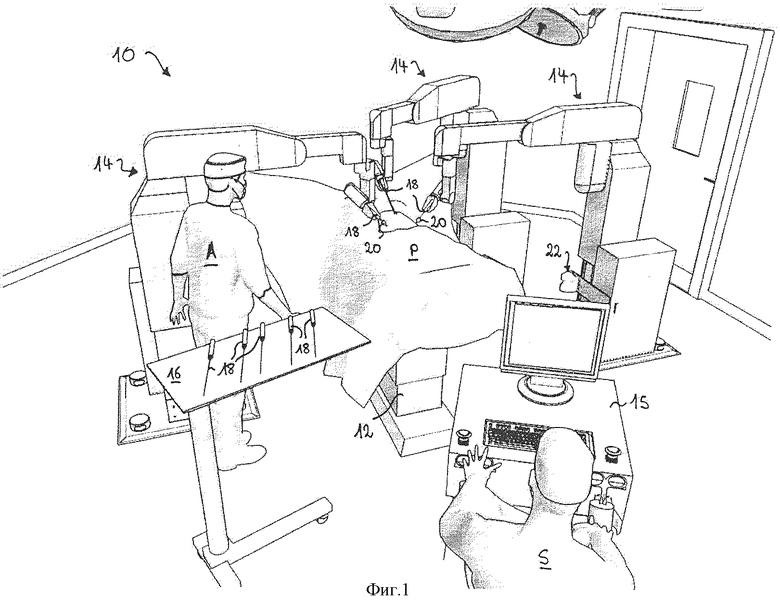
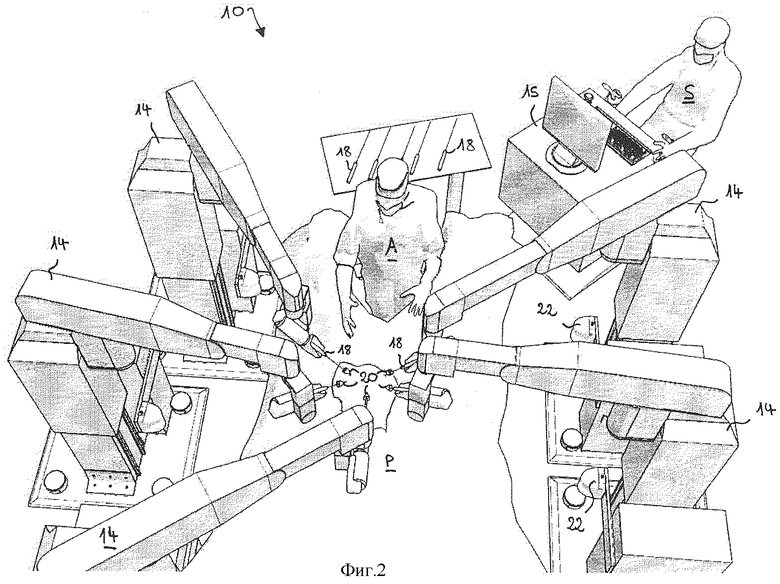
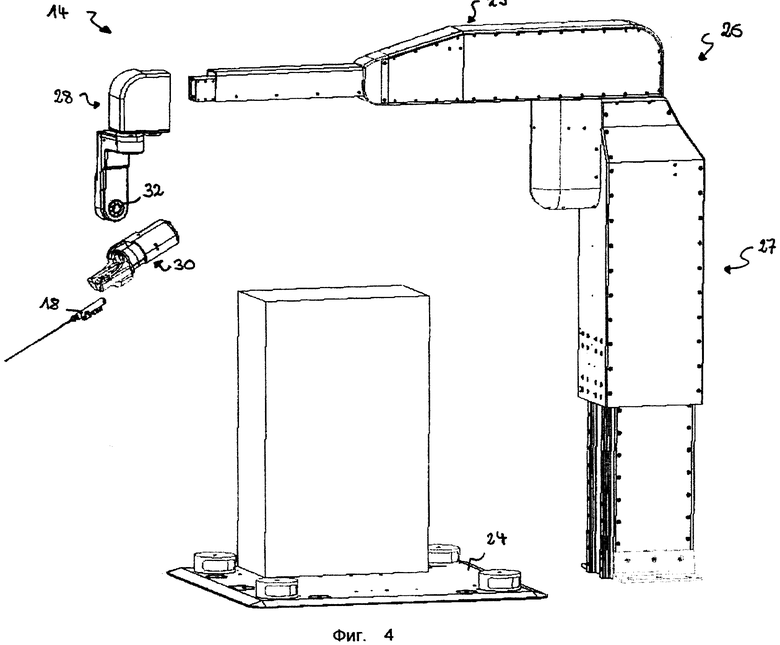
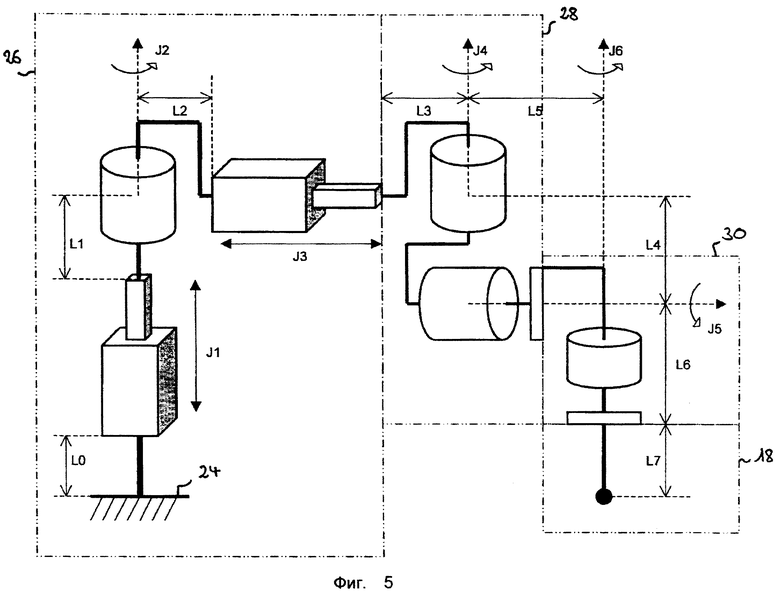
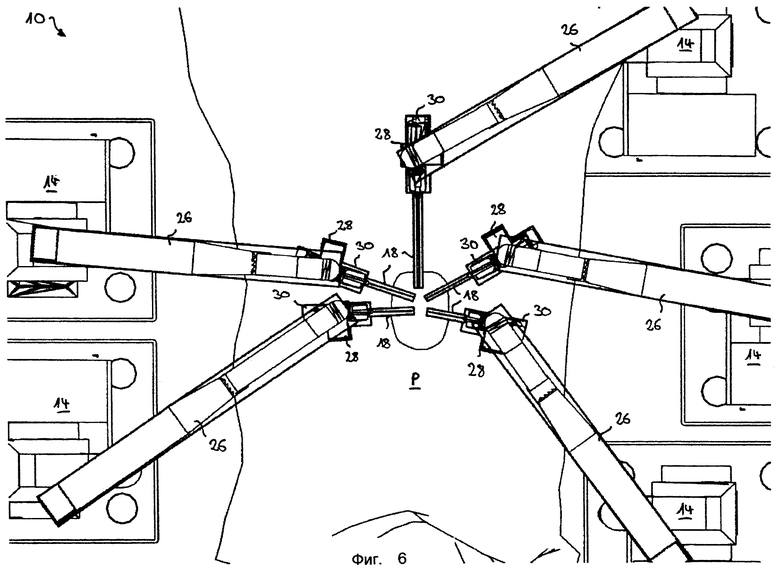
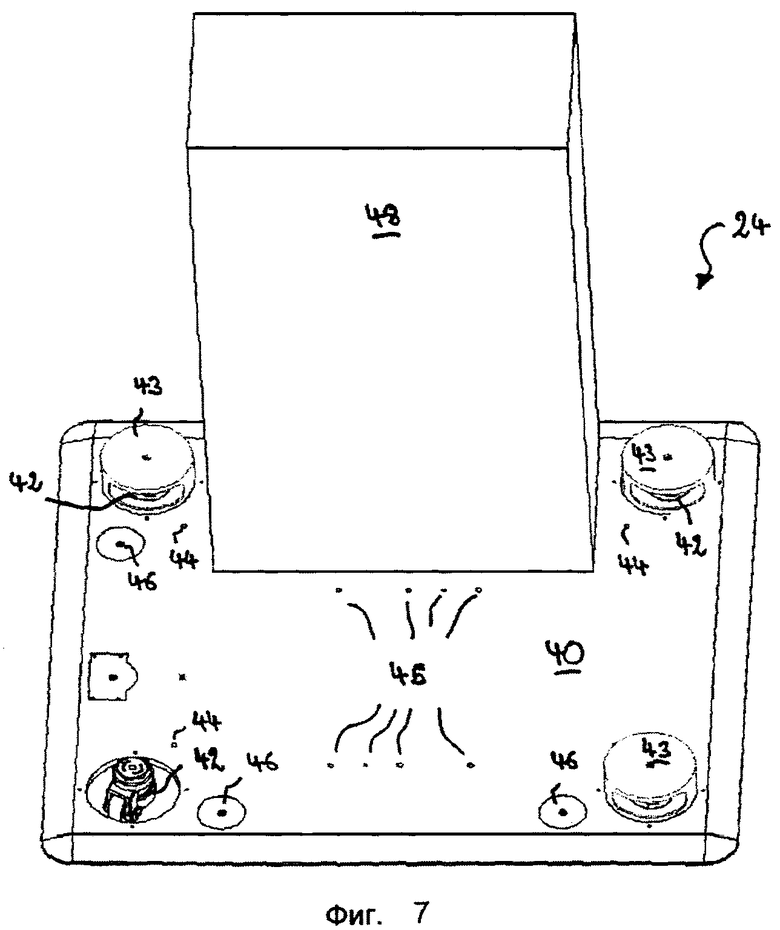
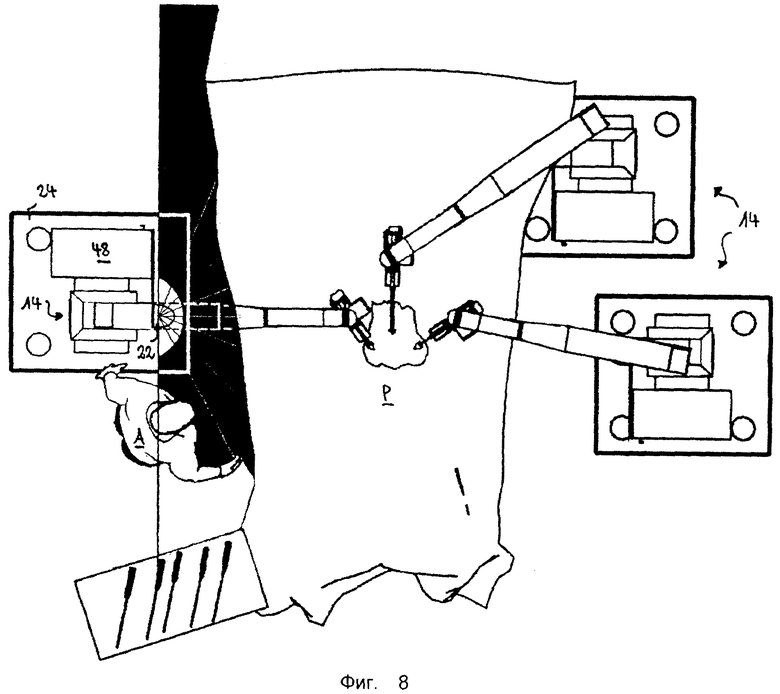
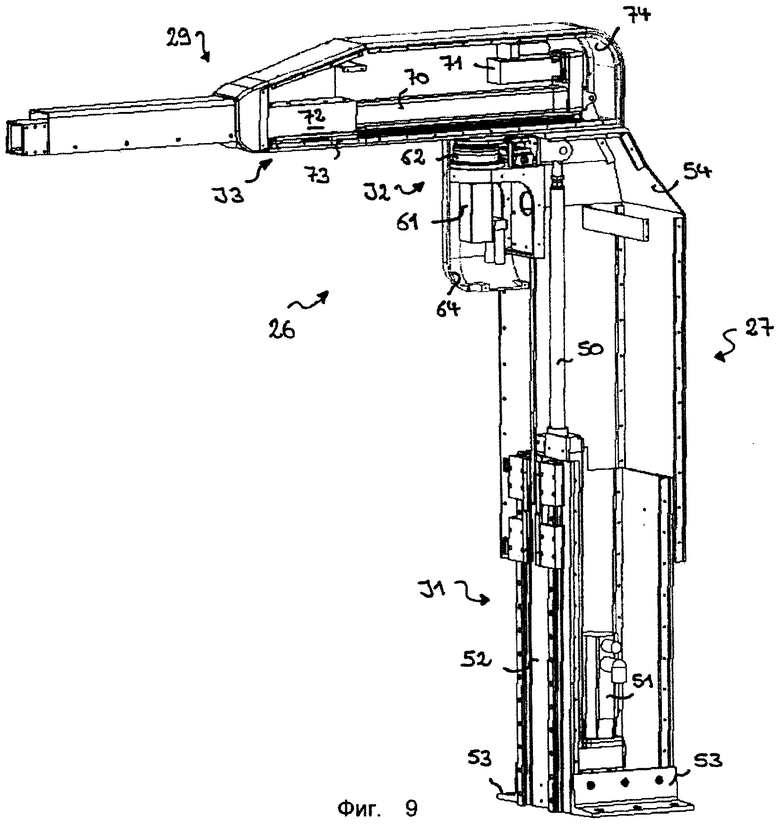
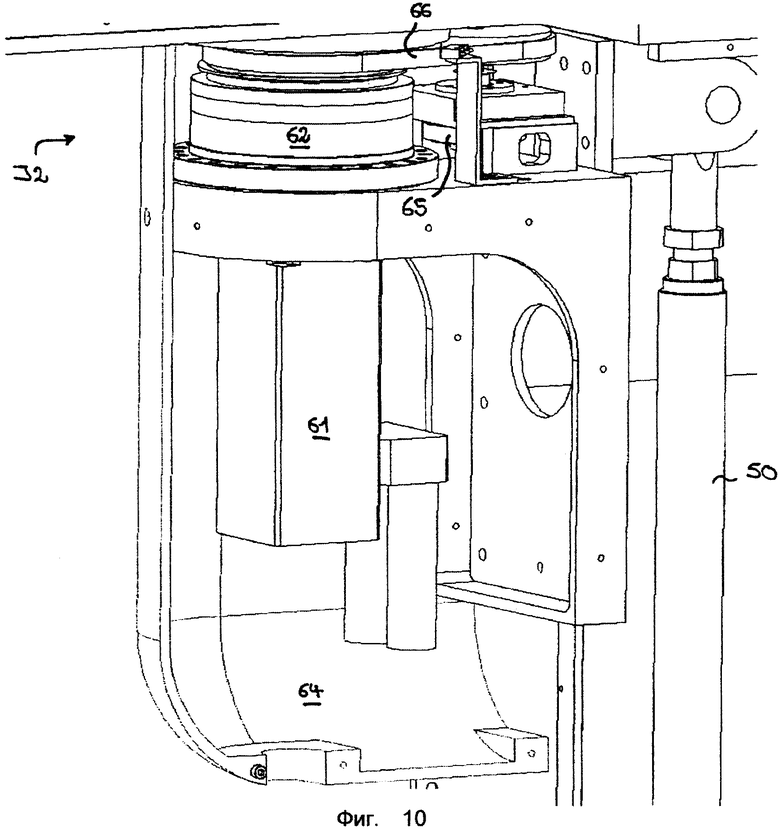
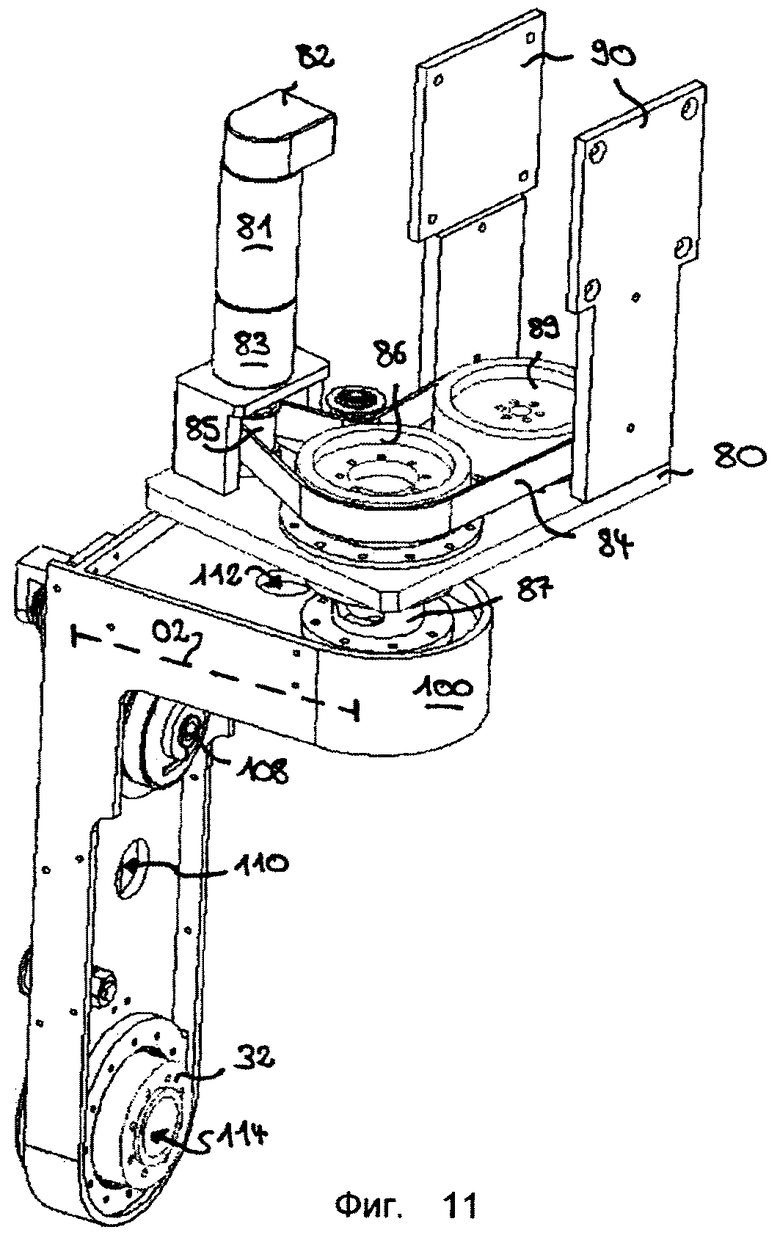
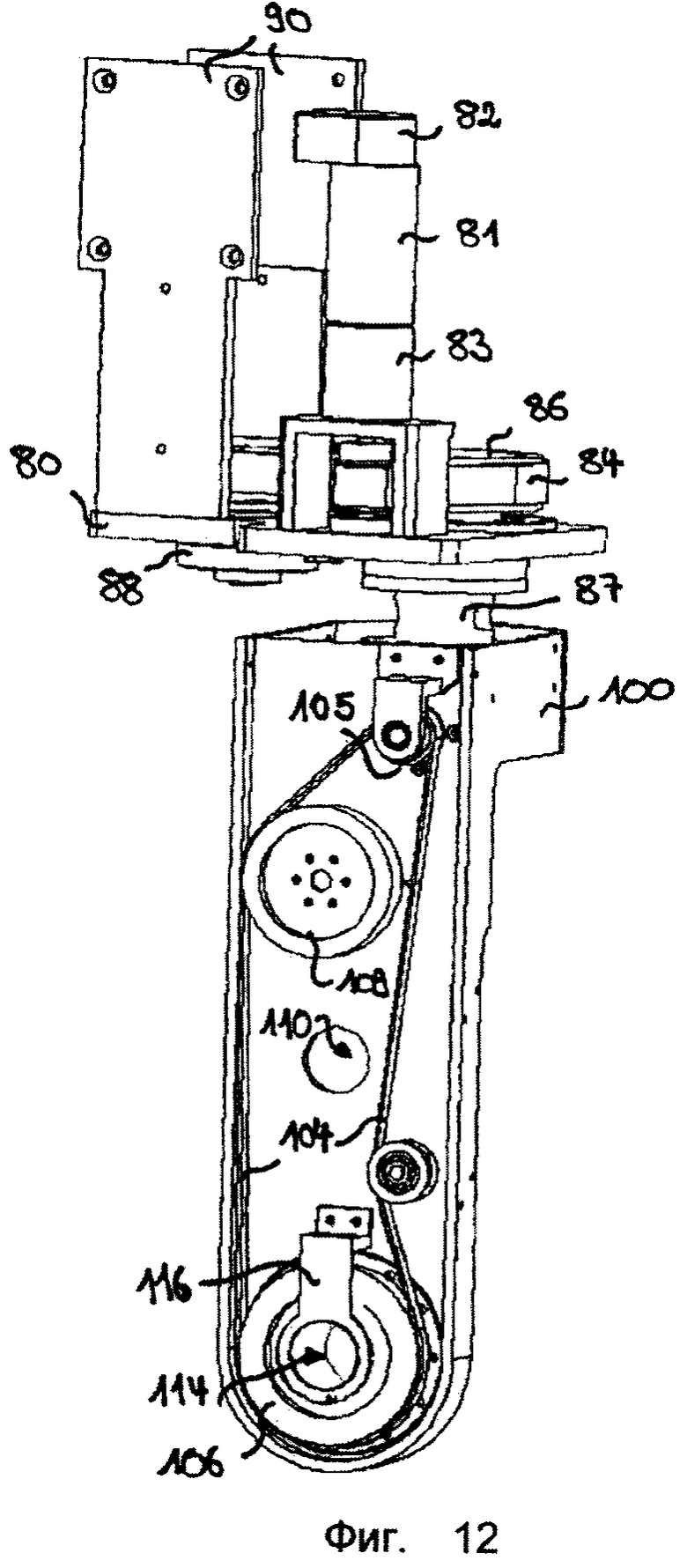
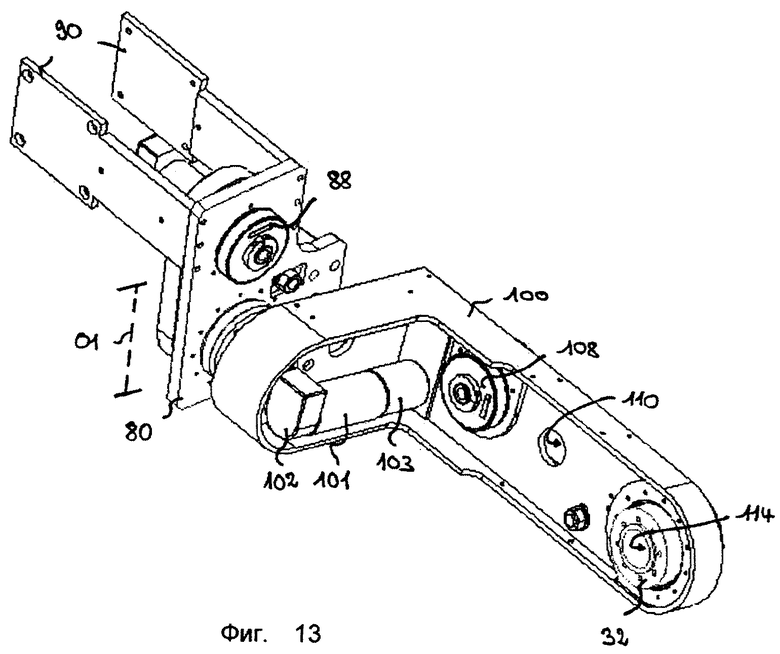
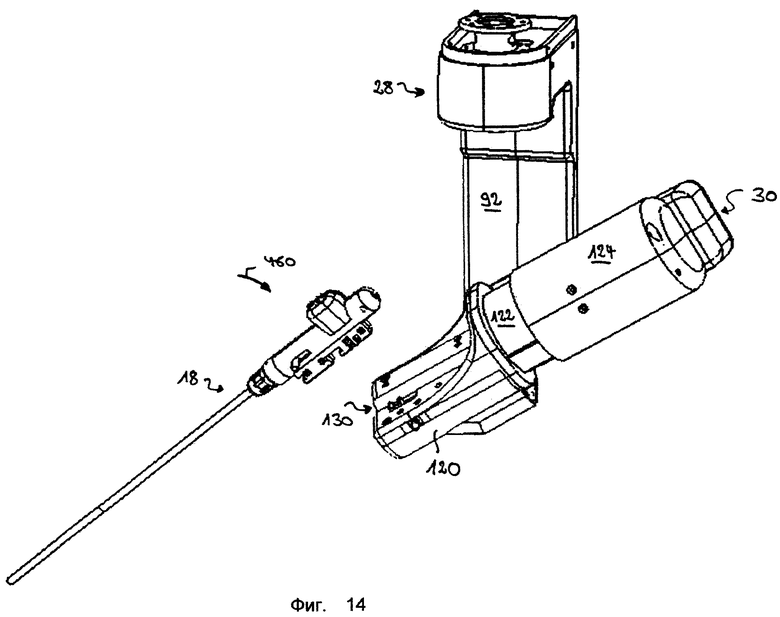
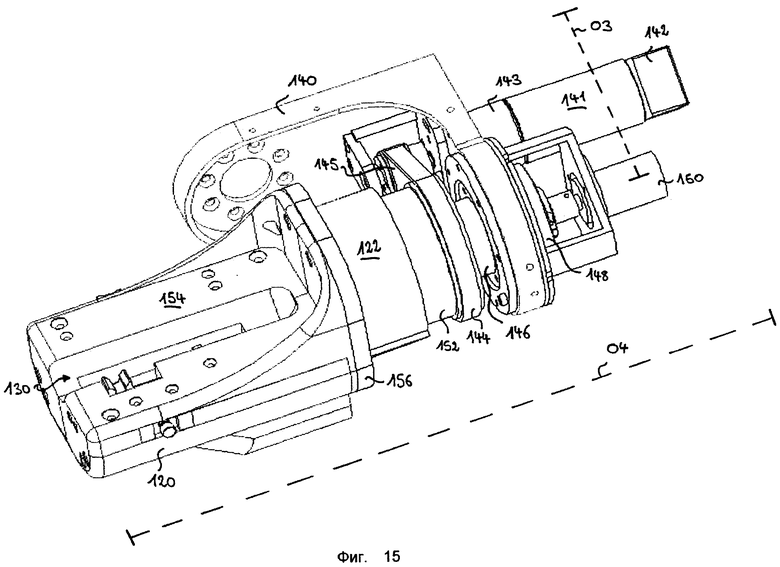
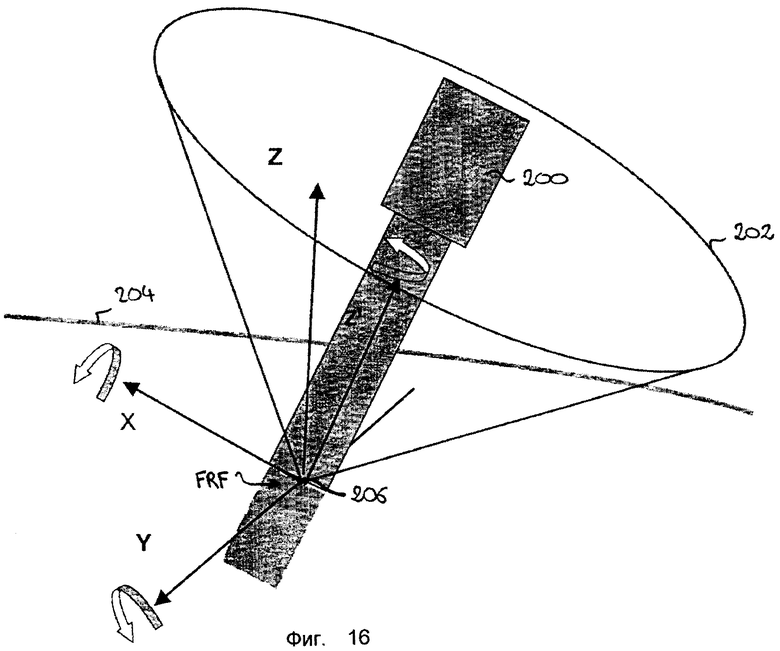
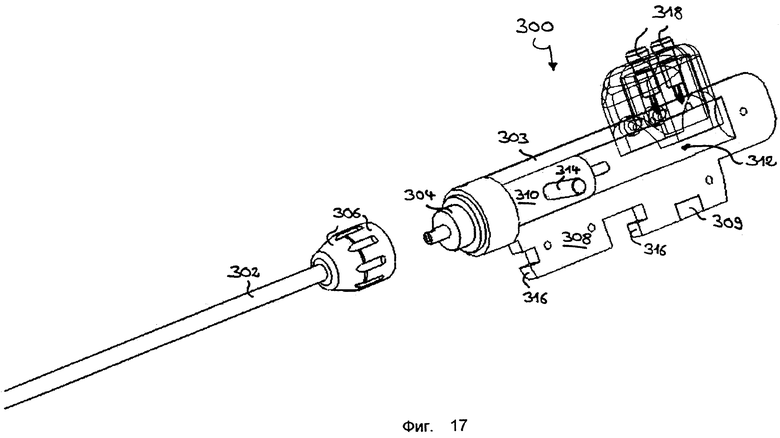
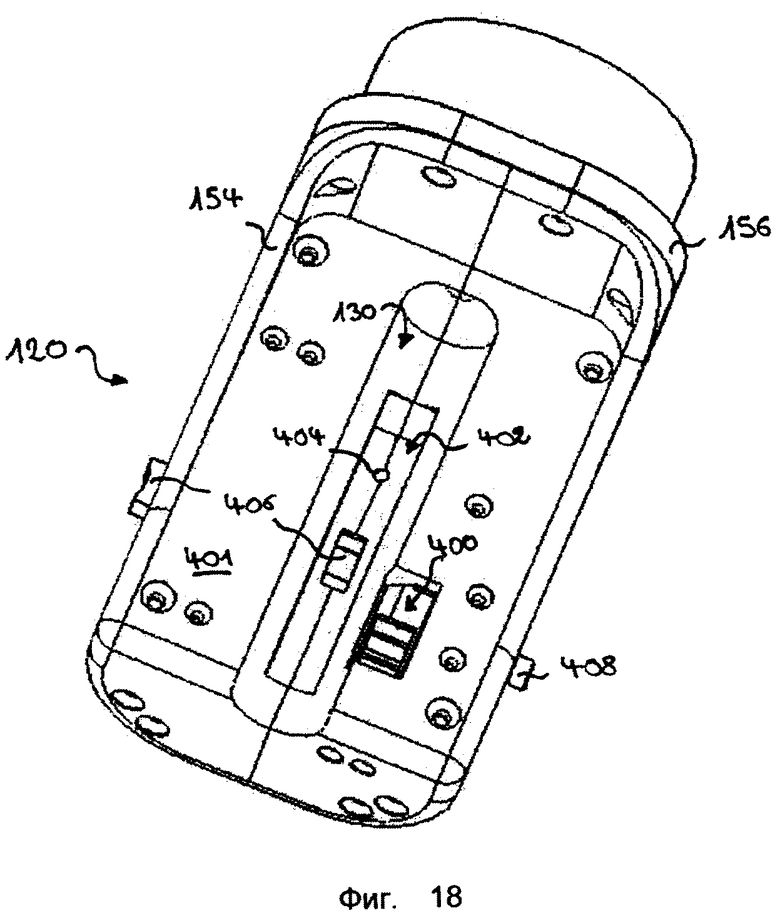
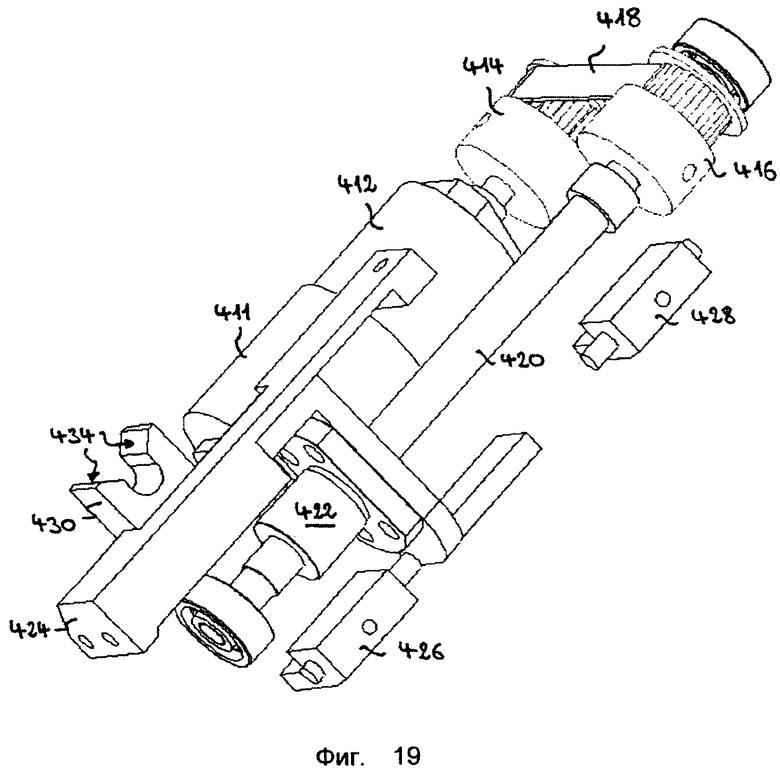
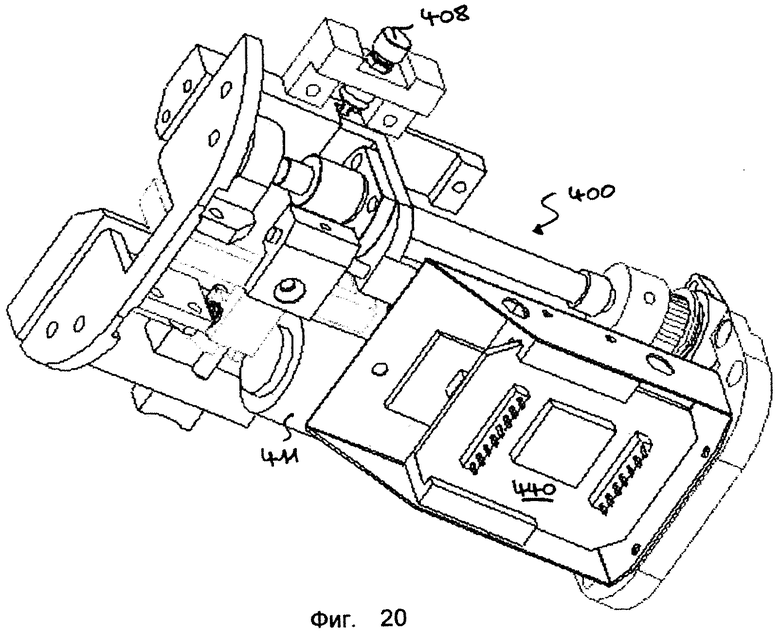
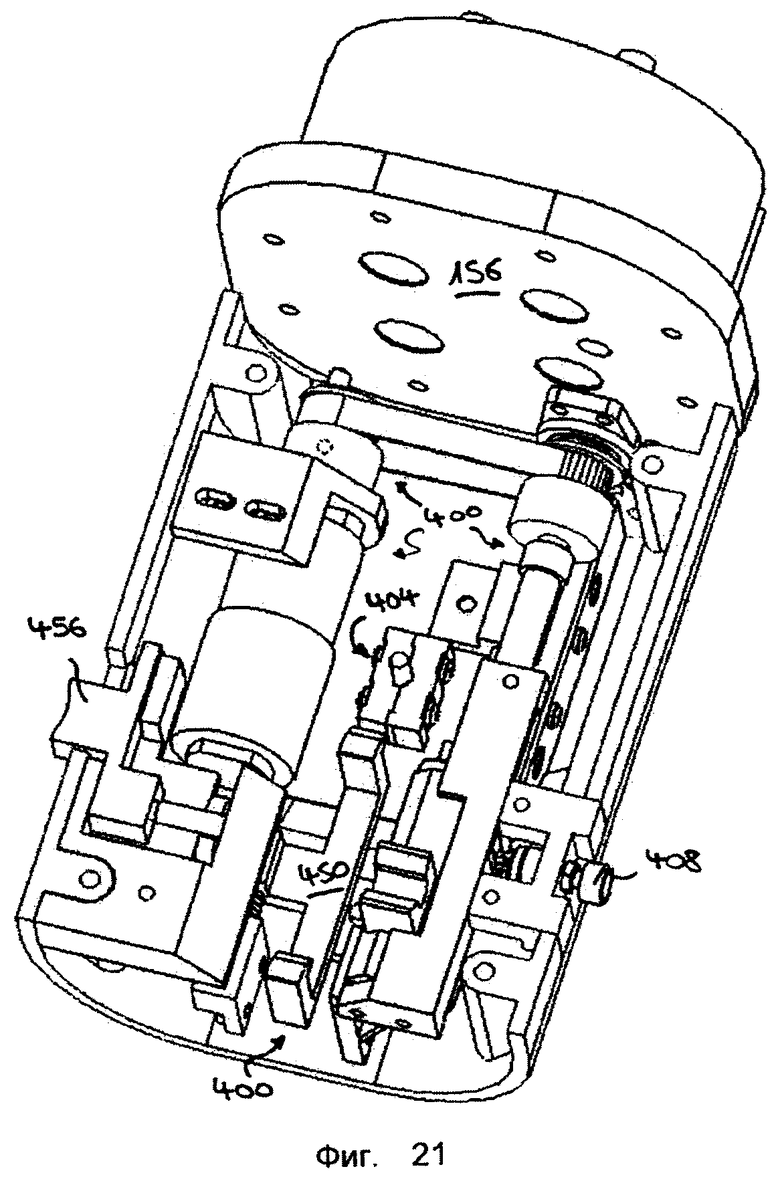
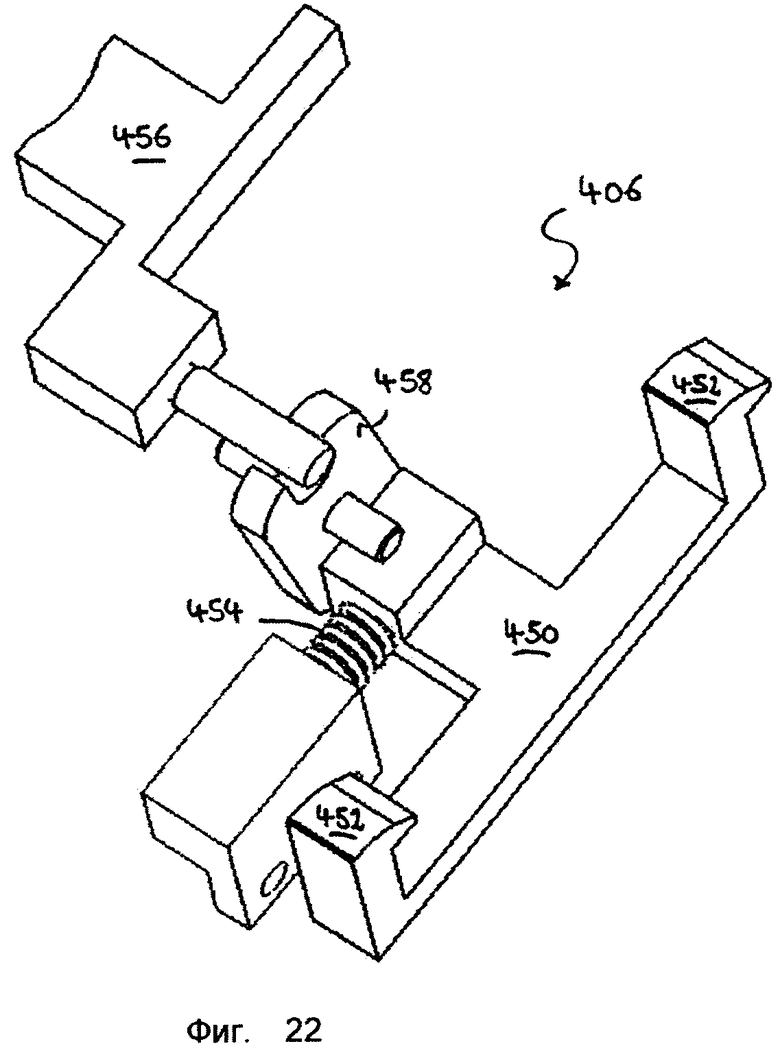
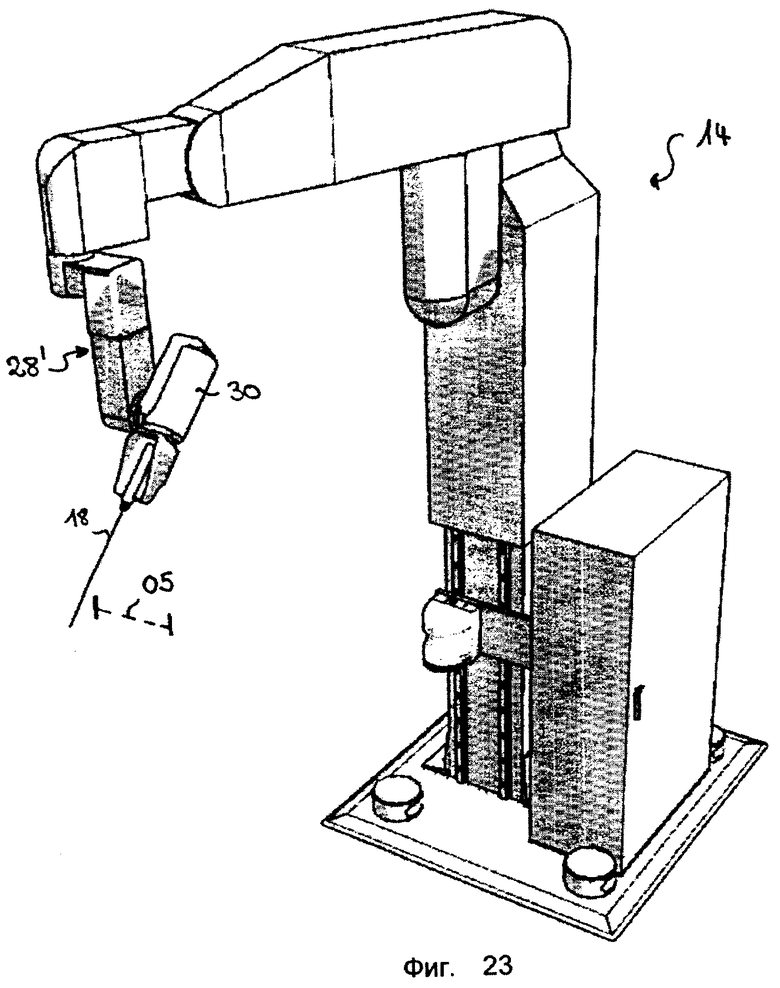
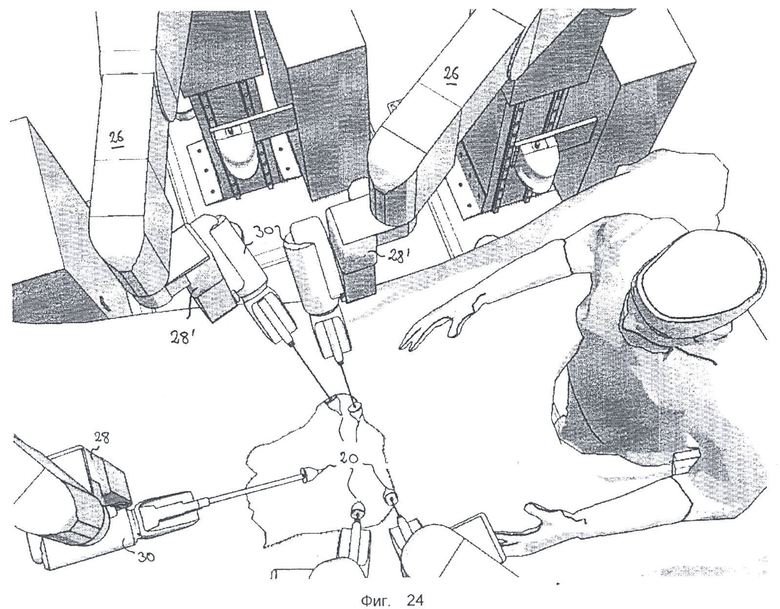
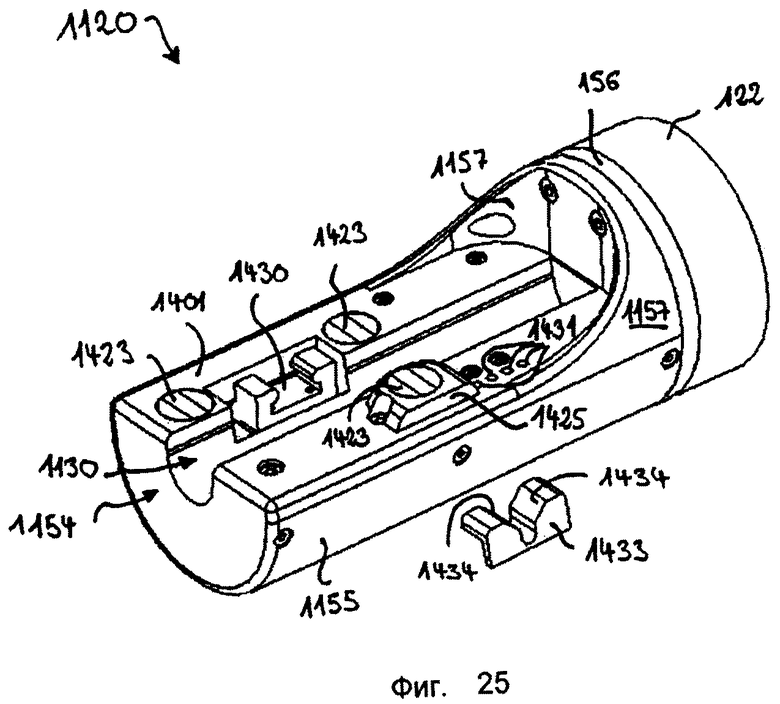
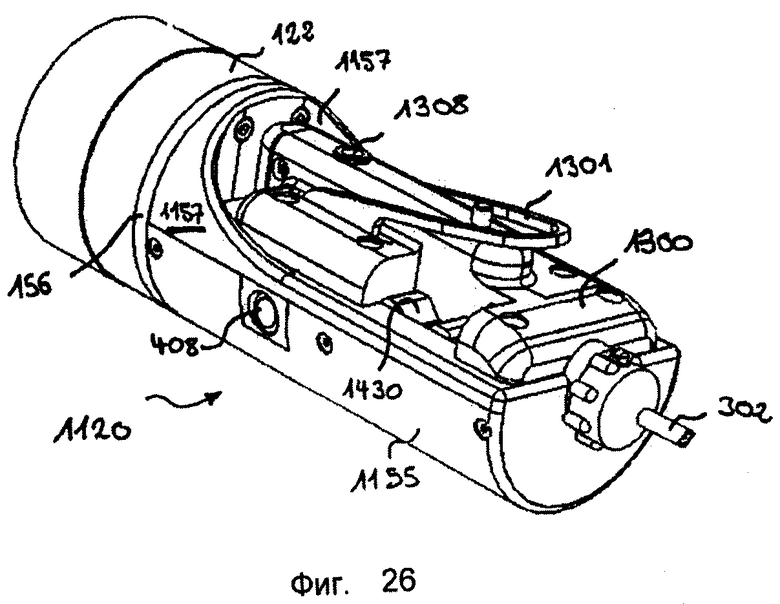
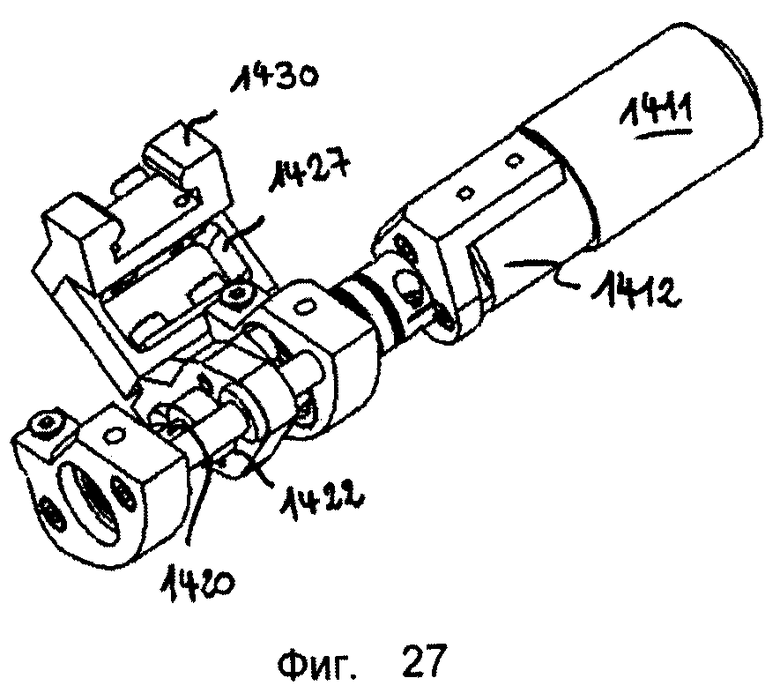
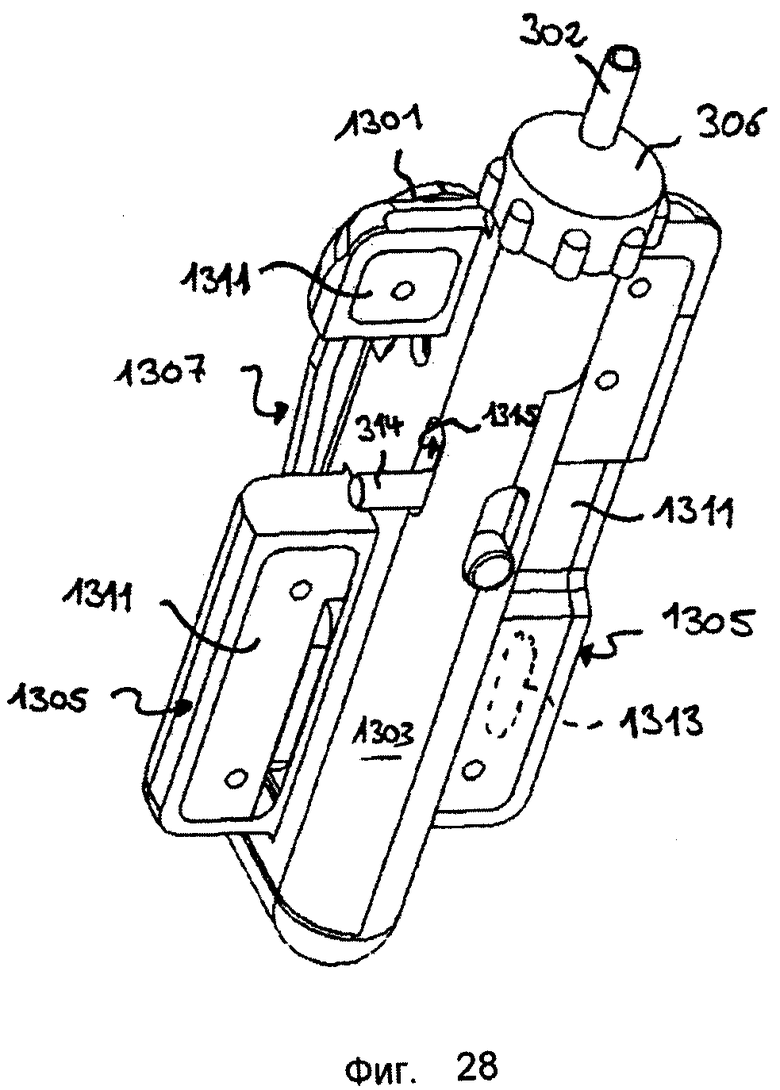
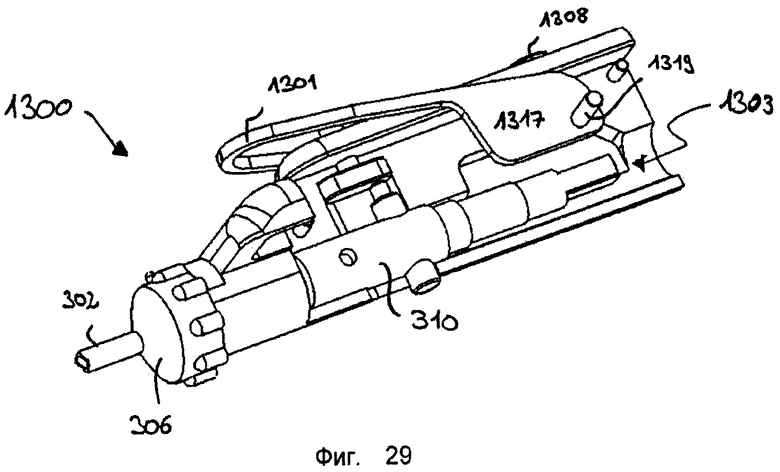
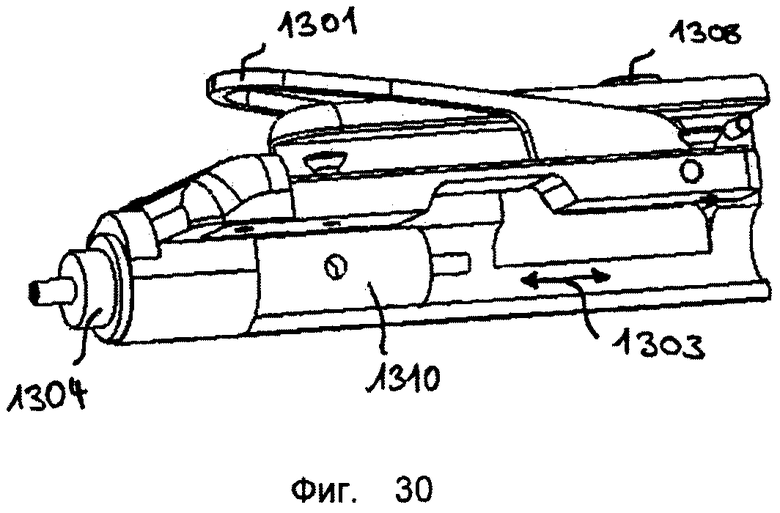
Изобретение относится к области манипуляторов, в частности к медицинским роботизированным системам (МРС). МРС (10) содержит робот-манипулятор (14) для манипулирования медицинским инструментом (18). Робот-манипулятор (14) содержит основание (24), руку (26) манипулятора, имеющую по существу вертикальную часть (27), по существу горизонтальную часть (29), запястный шарнир (28) манипулятора и исполнительный блок (30) для медицинского инструмента. Рука манипулятора (26) имеет цилиндрическую (PRP) кинематическую конфигурацию для координатного перемещения запястного шарнира (28) манипулятора. PRP конфигурация имеет призматическое (Р) первое сочленение (J1) для изменения высоты вертикальной части за счет поступательной степени свободы вдоль вертикальной оси, вращательное (R) второе сочленение (J2) для изменения угла поворота между вертикальной частью и горизонтальной частью за счет вращательной степени свободы вокруг по вертикальной оси и призматическое (Р) третье сочленение (J3) для изменения досягаемости горизонтальной части за счет поступательной степени свободы вдоль по горизонтальной оси. Усовершенствована кинематическая конфигурация робота-манипулятора. 24 з.п. ф-лы, 2 табл., 30 ил.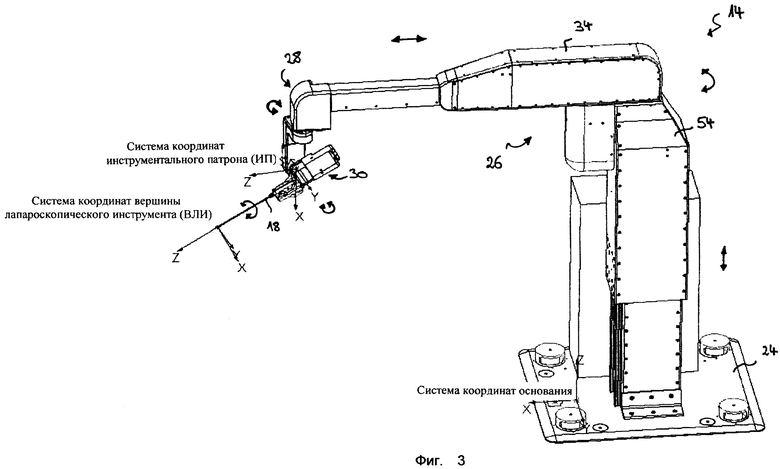
1. Медицинская роботизированная система для выполнения медицинских процедур, содержащая робот-манипулятор (14) для роботизированного манипулирования медицинским инструментом (18), причем робот-манипулятор содержит основание (24), руку (26) манипулятора, имеющую по существу вертикальную часть (27), поддерживаемую основанием, и по существу горизонтальную часть (29), поддерживаемую вертикальной частью, запястный шарнир (28) манипулятора, поддерживаемый рукой манипулятора, и исполнительный блок (30), поддерживаемый запястным шарниром манипулятора и скомпонованный для удержания медицинского инструмента, отличающаяся тем, что рука манипулятора (26) имеет цилиндрическую (PRP) кинематическую конфигурацию, имеющую призматическое (Р) первое сочленение (J1) для изменения высоты вертикальной части путем обеспечения поступательной степени свободы вдоль по существу вертикальной оси, вращательное (R) второе сочленение (J2) для изменения угла поворота между вертикальной частью и горизонтальной частью путем обеспечения вращательной степени свободы вокруг по существу вертикальной оси, и призматическое (Р) третье сочленение (J3) для изменения досягаемости горизонтальной части путем обеспечения поступательной степени свободы вдоль по существу горизонтальной оси.
2. Медицинская роботизированная система по п.1, в которой первое (Р) сочленение (J1) имеет вертикальную линейную направляющую (52) и первый линейный привод (50), предпочтительно линейный вал с шаровым и винтовым соединениями, для приведения в действие первого (Р) сочленения (J1).
3. Медицинская роботизированная система по п.2, в которой третье (Р) сочленение (J3) имеет горизонтальную линейную направляющую (73) и второй линейный привод (70), предпочтительно линейный вал с шаровым и винтовым соединениями, для приведения в действие третьего (Р) сочленения.
4. Медицинская роботизированная система по п.3, в которой горизонтальная часть имеет продолговатый кожух (74), который заключает в себе горизонтальную линейную направляющую и второй линейный привод, при этом горизонтальная часть содержит балку (72), которая телескопически вытягивается относительно кожуха на одной стороне и поддерживает запястный шарнир (28) на другой стороне.
5. Медицинская роботизированная система по п.1, в которой горизонтальная часть (29) руки имеет минимальное отклонение штанги 800 мм.
6. Медицинская роботизированная система по любому из пп.1-5, в которой второе (R) сочленение (J2) имеет передаточный механизм, предпочтительно передаточный механизм (62) с волновой передачей, мотор (61), предпочтительно бесщеточный сервомотор, связанный с входной ступенью передаточного механизма, и датчик (65) абсолютного положения, связанный с выходной ступенью передаточного механизма.
7. Медицинская роботизированная система по любому из пп.1-5, в которой запястный шарнир (28) манипулятора содержит вращательное (R) четвертое сочленение (J4) и вращательное (R) пятое сочленение (J5) для ориентации исполнительного блока (30).
8. Медицинская роботизированная система по п.7, в которой оси вращения четвертого (R) сочленения (J4) и второго (R) сочленения (J2) параллельны.
9. Медицинская роботизированная система по п.8, в которой ось вращения четвертого (R) сочленения (J4) расположена в одной плоскости с плоскостью, образованной осью вращения второго (R) сочленения (J2) и осью перемещения третьего (Р) сочленения (J3).
10. Медицинская роботизированная система по п.9, в которой четвертое (R) сочленение (J4) обеспечивает вращательную степень свободы вдоль по существу вертикальной оси для установки угла наклона в поперечном направлении исполнительного блока (30), и в котором пятое (R) сочленение (J5) обеспечивает вращательную степень свободы вдоль по существу горизонтальной оси для установки угла наклона в продольном направлении исполнительного блока (30).
11. Медицинская роботизированная система по п.10, в которой запястный шарнир (28) содержит опорную плиту (80), соединенную с горизонтальной частью (29) руки, и по существу L-образный опорный элемент (100), при этом четвертое (R) сочленение (J4) соединяет первый горизонтальный участок опорного элемента с опорной плитой (80), а пятое (R) сочленение (J5) соединяет второй вертикальный участок опорного элемента (100) с соединительным средством (32) для исполнительного блока (30), при этом запястный шарнир скомпонован таким образом, что оси вращения четвертого (R) сочленения и пятого (R) сочленения перпендикулярны и имеют точку пересечения.
12. Медицинская роботизированная система по любому из пп.1-5, в которой исполнительный блок (30) содержит привод (120; 1120) лапароскопического инструмента, имеющий средства для крепления хирургического инструмента (18) к манипулятору и линейный исполнительный механизм (400; 1400) для приведения в действие прикрепленного хирургического инструмента.
13. Медицинская роботизированная система по п.12, в которой исполнительный блок (30) содержит основную опорную раму (140) для присоединения исполнительного блока (30) к запястному шарниру (28) и вращательное (R) шестое сочленение (J6), которое соединяет привод лапароскопического инструмента (120; 1120) с основной опорной рамой, при этом шестое (R) сочленение обеспечивает вращательную степень свободы вдоль оси, которая совпадает с продольной осью хирургического инструмента, прикрепленного к приводу лапароскопического инструмента, для установки угла вращения прикрепленного хирургического инструмента.
14. Медицинская роботизированная система по п.13, в которой запястный шарнир (28) манипулятора содержит вращательное (R) четвертое сочленение (J4) и вращательное (R) пятое сочленение (J5) для ориентации исполнительного блока (30) и в которой оси вращения шестого (R) сочленения (J6) и пятого (R) сочленения (J5) перпендикулярны.
15. Медицинская роботизированная система по п.14, в которой запястный шарнир (28) манипулятора скомпонован таким образом, что оси вращения шестого (R) сочленения (J6) и четвертого (R) сочленения (J4) смещены на расстояние (O5), соответствующее приблизительно диаметру привода (120; 1120) лапароскопического инструмента в его наибольшем поперечном сечении.
16. Медицинская роботизированная система по п.15, в которой исполнительный блок (30) содержит датчиковый узел (122), содержащий датчик силомоментного очувствления с 6 степенями свободы и акселерометр линейных и угловых ускорений с совпадающими 6 степенями свободы, при этом узел соединяет привод лапароскопического инструмента с шестым (R) сочленением (J6).
17. Медицинская роботизированная система по п.16, в которой четвертое (R) сочленение (J4), пятое (R) сочленение (J5) и/или шестое (R) сочленение (J6), имеет мотор (81; 101; 141), предпочтительно бесщеточный сервомотор, передаточный механизм (83; 103; 143), имеющий соединенную с валом мотора входную ступень, ременную передачу (84; 104; 144), соединенную с выходной ступенью передаточного механизма для передачи движения соответствующему сочленению, и датчик (88; 108; 148) абсолютного положения, соединенный с ременной передачей.
18. Медицинская роботизированная система по п.11, в которой исполнительный блок (30) содержит привод (120; 1120) лапароскопического инструмента, имеющий средства для крепления хирургического инструмента (18) к манипулятору и линейный исполнительный механизм (400; 1400) для приведения в действие прикрепленного хирургического инструмента.
19. Медицинская роботизированная система по п.13, в которой исполнительный блок (30) содержит основную опорную раму (140) для присоединения исполнительного блока (30) к запястному шарниру (28) и вращательное (R) шестое сочленение (J6), которое соединяет привод лапароскопического инструмента (120; 1120) с основной опорной рамой, при этом шестое (R) сочленение обеспечивает вращательную степень свободы вдоль оси, которая совпадает с продольной осью хирургического инструмента, прикрепленного к приводу лапароскопического инструмента, для установки угла вращения прикрепленного хирургического инструмента.
20. Медицинская роботизированная система по п.19, в которой запястный шарнир (28) манипулятора содержит вращательное (R) четвертое сочленение (J4) и вращательное (R) пятое сочленение (J5) для ориентации исполнительного блока (30) и в которой оси вращения шестого (R) сочленения (J6) и пятого (R) сочленения (J5) перпендикулярны.
21. Медицинская роботизированная система по п.19, в которой запястный шарнир (28) манипулятора скомпонован таким образом, что оси вращения шестого (R) сочленения (J6) и четвертого (R) сочленения (J4) смещены на расстояние (O5), соответствующее приблизительно диаметру привода (120; 1120) лапароскопического инструмента в его наибольшем поперечном сечении.
22. Медицинская роботизированная система по п.19, в которой четвертое (R) сочленение (J4), пятое (R) сочленение (J5) и/или шестое (R) сочленение (J6), имеет мотор (81; 101; 141), предпочтительно безщеточный сервомотор, передаточный механизм (83; 103; 143), имеющий соединенную с валом мотора входную ступень, ременную передачу (84; 104; 144), соединенную с выходной ступенью передаточного механизма для передачи движения соответствующему сочленению, и датчик (88; 108; 148) абсолютного положения, соединенный с ременной передачей.
23. Медицинская роботизированная система по п.19, в которой исполнительный блок (30) содержит датчиковый узел (122), содержащий датчик силомоментного очувствления с 6 степенями свободы и акселерометр линейных и угловых ускорений с совпадающими 6 степенями свободы.
24. Медицинская роботизированная система по любому из пп.1-5, в которой основание (24) содержит лазерный сканер (22) дальности для определения проникновения персонала в рабочее пространство манипулятора.
25. Медицинская роботизированная система по любому из пп.1-5, в которой призматическое (Р) первое сочленение (J1) и призматическое (Р) третье сочленение (J3) соответственно имеют взаимосвязанный тормоз и взаимосвязанный датчик абсолютного положения.
| US 5351676 B1, 04.10.1994 | |||
| US 6120433 A, 19.09.2000 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ МИНИМАЛЬНО ИНВАЗИВНЫХ ОПЕРАЦИЙ НА СЕРДЦЕ | 1997 |
|
RU2233626C2 |
| EP 1146830 A4, 29.12.2004 | |||
| US 2002032452 A1, 14.03.2002 | |||
| DE 69327325 T2, 27.07.2000. | |||

