Область техники, к которой относится изобретение
Заявляемое изобретение относится к средствам энергоснабжения, а именно к системам обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке.
Уровень техники
Для обеспечения реализации роботизации технологического процесса работы железнодорожной станции необходимо решить задачу обеспечения надежного внешнего энергоснабжения вычислительных модулей системы технического зрения и электроприводов манипулятора. От надежности организации внешнего энергоснабжения зависит реализация технологического процесса роспуска железнодорожного подвижного состава на сортировочной горке, т.к. перерыв в энергоснабжении может привести при нахождении манипулятора в рабочем состоянии к аварии, повреждению железнодорожной инфраструктуры и подвижного состава. Задача организации электропитания усложняется тем, что манипулятор, соответствующая система приводов и система технического зрения закреплены на подвижной части робототехнического комплекса, которая должна получать электроснабжение от стационарного устройства электропитания.
Известны различные варианты выполнения систем электропитания (глава 3, Сапожников, В.В. Электропитание устройств железнодорожной автоматики, телемеханики и связи: учебник / В.В. Сапожников, Н.П. Ковалев, В.А. Кононов, А.М. Костроминов, Б.С. Сергеев. - М.: Издательство «Маршрут», 2005. - 453 с. - ISBN 5-89035-312-8). Наибольший интерес с точки зрения электропитания такого потребителя, как робототехнический комплекс, предназначенный для роспуска железнодорожного подвижного состава на сортировочной горке, представляют комбинированные системы питания, в частности системы с преобразователями постоянного тока и системы с инвертором.
Основным недостатком известных структурных схем организации электроснабжения является отсутствие учета особенностей организации электропитания оборудования, размещаемого на подвижной части робототехнического комплекса.
Из уровня техники известна система передачи электрической энергии транспортному средству с использованием нескольких сегментов проводной сети (RU 2605579 С2, 20.12.2016, B60L 5/00, B60L 9/00, H02J 50/00). Система передачи электрической энергии транспортному средству, в которой:
Система для передачи электрической энергии транспортному средству (81, 89), в которой:
- система содержит электрическую проводниковую структуру (Т) для выработки переменного электромагнитного поля и передачи посредством него электромагнитной энергии к транспортному средству,
- проводниковая структура (Т) содержит несколько последовательно расположенных сегментов (T1, Т2, Т3, Т4, Т5, Т6), причем каждый сегмент (T1, Т2, Т3, Т4, Т5, Т6) простирается вдоль разного участка пути движения транспортного средства,
- система содержит источник (3) переменного тока для передачи электрической энергии к нескольким из сегментов (T1, Т2, Т3, Т4, Т5, Т6), причем сегменты (T1, Т2, Т3, Т4, Т5, Т6) электрически соединены параллельно друг другу с источником (3) переменного тока,
- каждый сегмент (T1, Т2, Т3, Т4, Т5, Т6) связан с источником (3) питания через соотнесенный переключающий блок (13), выполненный для включения и выключения сегмента (T1, Т2, Т3, Т4, Т5, Т6) путем подключения или отключения сегмента (T1, Т2, Т3, Т4, Т5, Т6) к источнику (3) питания/от источника (3) питания,
- во время работы сегмента (T1, Т2, Т3, Т4, Т5, Т6), когда переключающий блок (13) включен, каждый сегмент (T1, Т2, Т3, Т4, Т5, Т6) связан с источником (3) питания через соотнесенный переключающий блок (13) и через источник (12) постоянного по величине тока,
- источник (12) постоянного по величине тока связан с сегментом (Т1, Т2, Т3, Т4, Т5, Т6) на одной стороне и с источником (3) питания на другой стороне и выполнен для поддержания электрического тока через сегмент (Т1, Т2, Т3, Т4, Т5, Т6), постоянным по величине, независимо от электрической мощности, которая передается к одному или более транспортным средствам, перемещающимся вдоль сегмента (T1, Т2, Т3, Т4, Т5, Т6).
Недостатком известной системы передачи электрической энергии транспортному средству с использованием нескольких сегментов проводной сети, является низкая надежность электропитания оборудования, размещаемого на подвижной части робототехнического комплекса, осуществляющего роспуск железнодорожного подвижного состава на сортировочной горке.
Наиболее близким по своей технической сущности к заявляемому изобретению является устройство для передачи электрической энергии к движущемуся безрельсовому электротранспорту (RU 2679489 С9, 02.04.2019, H02J 50/00). Устройство для передачи электрической энергии к движущемуся безрельсовому электротранспорту содержит источник с кабельными линиями электропередачи и приемник электрической энергии на электротранспорте, подсоединенный через поворотный упругогибкий двухзвенный «ус»-контактор с концевиками, подпружиненный шарнирный привод поворота, соединенный с бортовой электросистемой, электродвигателями, компьютерной системой управления-контроля, автопилотом и аккумуляторными батареями. Кабельные линии электропередачи закреплены изолированно к продольным профилям или желобам существующих стандартных барьеров-разделителей по линии встречных полос движения, за исключением перекрестков, разворотов и разъездов, и впрессованы внутри пластиково-композитных коробов «С»-или «3»-образного сечения с щелями для отвода дождевой воды. Электротранспорт, движущийся в ближайшем ряду к ним, подсоединен через поворотно-выдвижной однозвенный телескопический аэродинамически профилированный боковой «ус»-контактор, снабженный «Т» или «У»-образным роликоопорным или бесконтактным магнитно-индукционным концевиком. Причем «ус»-контактор вписан в обводы левого борта электротранспорта по нижней части, а также колесных арок и бамперов, и закреплен шарнирно с автоматическим приводом адаптивного позиционирования под его днищем с возможностью поворота и выдвижения в наклонно-горизонтальной плоскости, снабженным следящими датчиками положения концевика, и «ус»-контактор оснащен фиксаторами выпущенного и убранного положения с электронным дублированием на монитор при беспилотном/пилотном управлении.
Оно взято за прототип. К недостатку прототипа следует отнести низкую надежность электропитания оборудования, размещаемого на подвижной части робототехнического комплекса.
Раскрытие изобретения
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении надежности электропитания оборудования, размещаемого на подвижной части робототехнического комплекса.
Технический результат достигается тем, что система обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке, содержит источник внешний трехфазный переменного тока, подключенный к шине переменного напряжения. При этом система обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке, дополнительно содержит подключенный к выходу источника внешнего трехфазного переменного тока первый вход первого контактора управляемого и вход блока контроля показателей качества электрической энергии, выходы которого соединены соответственно со вторым входом первого контактора управляемого, со вторым входом второго контактора управляемого и со вторым входом третьего контактора управляемого. Выходы первого контактора управляемого и третьего контактора управляемого соединены соответственно с первым и вторым входом шины переменного напряжения устройства распределительного, первый выход которой последовательно через второй контактор управляемый, первый выпрямитель, батарею аккумуляторную и инвертор соединен с первым входом третьего контактора управляемого. Второй выход шины переменного напряжения соединен через второй выпрямитель с шиной напряжения питания нагрузки. Третий выход шины переменного напряжения соединен со входом системы контактной передачи электрической энергии к распределительному устройству подвижной части робототехнического комплекса, которая представляет собой два проводника, стационарно размещаемых вдоль направляющей подвижной части робототехнического комплекса, а также токоприемники, закрепляемые с использованием изоляционных материалов на подвижной части робототехнического комплекса.
Краткое описание чертежей
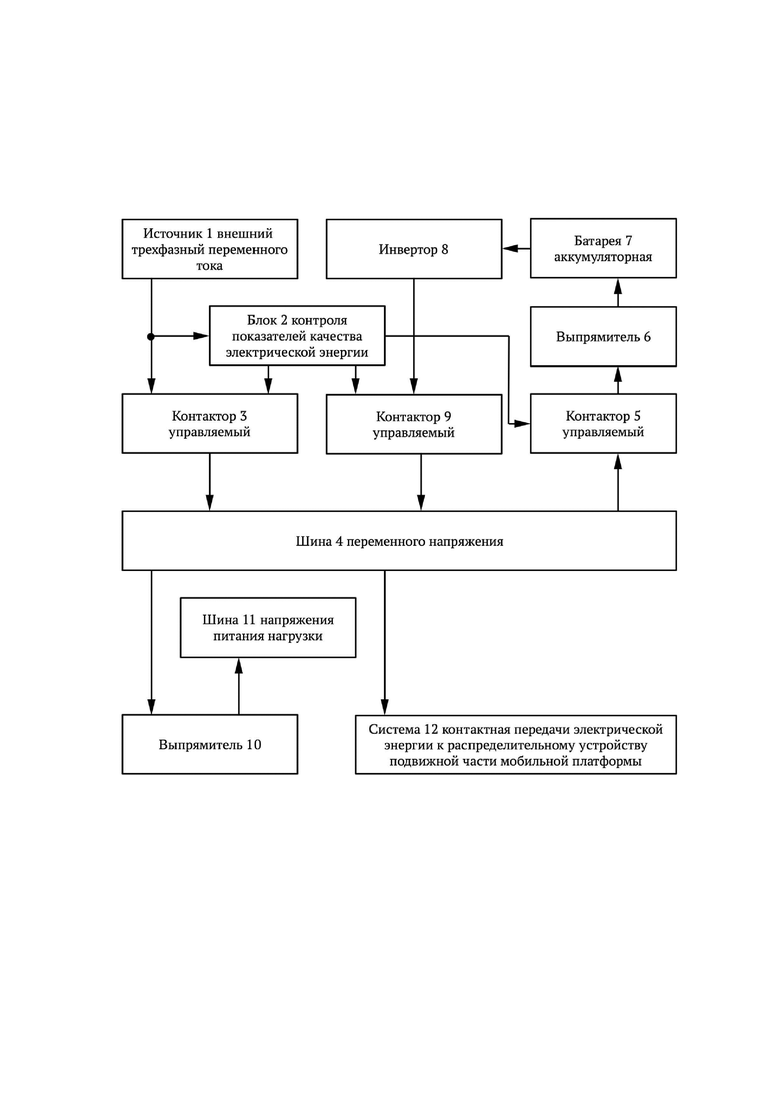
Заявляемое изобретение поясняется чертежом, на котором показана структурная схема системы обеспечения электропитания робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке.
Устройство содержит подключенный к выходу источника 1 внешнего трехфазного переменного тока первый вход первого контактора 3 управляемого и вход блок 2 контроля показателей качества электрической энергии, выходы которого соединены соответственно со вторым входом первого контактора 3 управляемого, со вторым входом второго контактора 9 управляемого и со вторым входом третьего контактора 5 управляемого. Выходы первого контактора 3 управляемого и третьего контактора 9 управляемого соединены соответственно с первым и вторым входом шины 4 переменного напряжения устройства распределительного, первый выход которой последовательно через второй контактор 5 управляемый, первый выпрямитель 6, батарею 7 аккумуляторную и инвертор 8 соединен с первым входом третьего контактора 9 управляемого. Второй выход шины 4 переменного напряжения соединен через второй выпрямитель 10 с шиной 11 напряжения питания нагрузки. Третий выход шины 4 переменного напряжения соединен со входом системы 12 контактной передачи электрической энергии к распределительному устройству подвижной части робототехнического комплекса.
Осуществление изобретения
Система обеспечения электропитания робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке, работает следующим образом.
Используют систему электропитания, содержащую блок 2 контроля показателей качества электрической энергии, по крайней мере три управляемых контактора 3, 5 и 9, шину 4 переменного напряжения, а также шину 11 напряжения питания нагрузки, по крайней мере два выпрямителя 7 и 10, по крайней мере один инвертор 9, по крайней мере одну аккумуляторную батарею 8 и контактную систему 12 передачи электрической энергии к распределительному устройству подвижной части мобильной платформы.
Все блоки, за исключением системы 12 контактной передачи электрической энергии к распределительному устройству подвижной части мобильной платформы, выполнены типовыми с использованием известных схемных решений (Сапожников, В.В. Электропитание устройств железнодорожной автоматики, телемеханики и связи: учебник / В.В. Сапожников, Н.П. Ковалев, В.А. Кононов, А.М. Костроминов, Б.С. Сергеев. - М.: Издательство «Маршрут», 2005. - 453 с. - ISBN 5-89035-312-8). Система 12 контактной передачи электрической энергии к распределительному устройству подвижной части мобильной платформы представляет собой систему стационарно размещаемых вдоль направляющей мобильной платформы двух проводников (фазного и рабочего нейтрального) (на чертеже не показаны), а также токоприемники (на чертеже не показаны), закрепляемые с использованием изоляционных материалов на подвижной части робототехнического комплекса и служащие для формирования замкнутой цепи для протекания электрического тока через оборудование, замещаемого на подвижной части робототехнического комплекса.
Непрерывно осуществляют с использованием блока 2 контроля показателей качества электрической энергии контроль отклонения напряжения электропитания в точке передачи электрической энергии от внешнего источника 1 трехфазного напряжения переменного тока от номинального значения. При соответствии измеренного значения отклонения напряжения электропитания в точке передачи электрической энергии от внешнего источника 1 трехфазного напряжения переменного тока от номинального значения норме последовательно: с использованием третьего контактора 9 управляемого отключают выход инвертора 8 от шины 4 переменного напряжения, подключают с использованием первого управляемого контактора 3 внешний источник 1 трехфазного напряжения переменного тока к шине 4 переменного напряжения, с использованием второго контактора 5 управляемого подключают через первый выпрямитель 6 к шине 4 переменного напряжения аккумуляторную батарею 7.
При подключении внешнего источника 1 трехфазного напряжения переменного тока к шине 4 переменного напряжения распределительного устройства осуществляют заряд аккумуляторной батареи 7 через первый выпрямитель 6 и замкнутый второй контактор 5 управляемый, а также питание шины 11 напряжения питания нагрузки и контактной системы 12 передачи электрической энергии к распределительному устройству подвижной части мобильной платформы.
При несоответствии измеренных отклонений напряжения электропитания в точке передачи электрической энергии от внешнего источника 1 трехфазного напряжения переменного тока от номинального значения норме осуществляют последовательно: отключение внешнего источника 1 трехфазного напряжения переменного тока с использованием первого управляемого контактора 3, с использованием второго управляемого контактора 5 отключение от шины 4 переменного напряжения первого выпрямителя 6 и с использованием третьего управляемого контактора 9 подключение к шине 4 переменного напряжения через инвертор 8 аккумуляторной батареи 7. Далее в течение времени, достаточного для выполнения аварийного протокола, осуществляют питание шины 11 напряжения питания нагрузки и контактной системы 12 передачи электрической энергии к распределительному устройству подвижной части мобильной платформы от аккумуляторной батареи 7, подключенной к шине 4 переменного напряжения через инвертор 8 и третий управляемый контактор 9.
Аварийный протокол включает в себя выполнение следующих технологических операций:
- перевод манипулятора (на чертеже не показан) из рабочего положения, когда часть манипулятора находится в пределах габарита приближения строений, в транспортировочное, когда никакая часть робототехнического комплекса и его манипулятора не находится в границах габарита приближения строений;
- контроль перевода манипулятора из рабочего положения в транспортировочное;
- остановка подвижной части робототехнического комплекса;
- перевод мобильной платформы робототехнического комплекса в режим ожидания подключения внешнего источника 1 трехфазного переменного тока.
С учетом вышеизложенного достигается повышение надежности электропитания оборудования, размещаемого на подвижной части робототехнического комплекса.
Изобретение относится к электротехнике, а именно к системам обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке. Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении надежности электропитания оборудования, размещаемого на подвижной части робототехнического комплекса. Технический результат достигается за счет того, что система обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке, содержит подключенный к выходу источника внешнего трехфазного переменного первый вход первого контактора управляемого и вход контроля показателей качества электрической энергии, выходы которого соединены соответственно со вторым входом первого контактора управляемого, со вторым входом второго контактора управляемого и со вторым входом третьего контактора управляемого. Причем выходы первого контактора управляемого и третьего контактора управляемого соединены с соответственно первым и вторым входом шины переменного напряжения устройства распределительного, первый выход которой последовательно через второй контактор управляемый, первый выпрямитель, батарею аккумуляторную и инвертор соединен с первым входом третьего контактора управляемого; второй выход шины переменного напряжения соединен через второй выпрямитель с шиной напряжения питания нагрузки. Система обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке, дополнительно содержит систему контактной передачи электрической энергии к распределительному устройству подвижной части робототехнического комплекса, соединенную своим входом с третьим выходом шины переменного напряжения. 1 ил.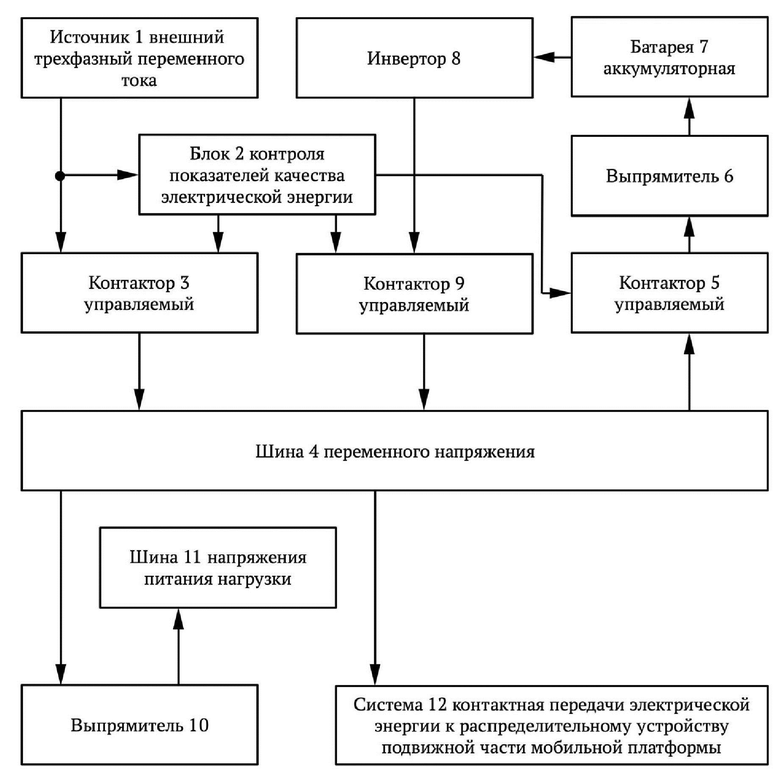
Система обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке, содержащая источник внешний трехфазный переменного тока, подключенный к шине переменного напряжения, отличающаяся тем, что дополнительно содержит подключенный к выходу источника внешнего трехфазного переменного тока первый вход первого контактора управляемого и вход блока контроля показателей качества электрической энергии, выходы которого соединены соответственно со вторым входом первого контактора управляемого, со вторым входом второго контактора управляемого и со вторым входом третьего контактора управляемого; причем выходы первого контактора управляемого и третьего контактора управляемого соединены соответственно с первым и вторым входом шины переменного напряжения устройства распределительного, первый выход которой последовательно через второй контактор управляемый, первый выпрямитель, батарею аккумуляторную и инвертор соединен с первым входом третьего контактора управляемого; второй выход шины переменного напряжения соединен через второй выпрямитель с шиной напряжения питания нагрузки; причем третий выход шины переменного напряжения соединен со входом системы контактной передачи электрической энергии к распределительному устройству подвижной части робототехнического комплекса, которая представляет собой два проводника, стационарно размещаемых вдоль направляющей подвижной части робототехнического комплекса, а также токоприемники, закрепляемые с использованием изоляционных материалов на подвижной части робототехнического комплекса.
| US 9882385 B2, 30.01.2018 | |||
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ БЕСПЕРЕБОЙНОГО ЭЛЕКТРОПИТАНИЯ В АВАРИЙНЫХ РЕЖИМАХ | 1998 |
|
RU2133542C1 |
| 0 |
|
SU157693A1 | |
| Способ получения пара-нитроацетофенона | 1953 |
|
SU101280A1 |
| Механизм транспортировки пленки, в частности, в фото- и кинокамерах, кассетах и т.п. | 1956 |
|
SU111364A1 |
| CN 208369218 U, 11.01.2019. | |||

