Изобретение относится к воздушной разведке полезных ископаемых с использованием магнитных полей, создаваемых и изменяемых объектом [G01V 3/00, G01V 3/08, G01V 3/12, G01V 3/15, G01V 3/16, G01V 3/165, G01V 3/17].
Метод переходных процессов или зондирование становлением поля в ближней зоне - метод электроразведки, в основе которого лежит электромагнитная индукция. В методе переходных процессов используются две замкнутые незаземлённые петли квадратной или круглой формы. Одна - для возбуждения, другая - для приёма. Иногда они могут быть совмещены. Размеры стороны квадрата могут быть от одного до нескольких сотен метров. В генераторной петле создают переменный ток, который образует переменное магнитное поле. Оно, в свою очередь, приводит к возникновению вихревых электрических токов внутри горных пород. При включении тока у поверхности возникает кольцо вихревых токов, размер которого совпадает с генераторной петлёй. С течением времени кольцо погружается на глубину, а его диаметр расширяется и объём задействованных пород тоже. И так пока вся энергия не перейдёт в тепловую. Вихревые токи вызывают появление магнитного поля, сигнал от которого измеряется в приёмной петле. Величина сигнала в приёмной петле полностью определяется распределением удельного электрического сопротивления в породах.
Метод электроразведки позволяет получить карты кажущегося сопротивления на разных частотах или разрезы удельного электрического сопротивления вдоль профиля. Важным преимуществом является отсутствие необходимости электрического контакта с землёй, что позволяет работать по снегу и в засушливых районах.
Наземными аналогами заявляемого способа объемной реконструкции электрофизической модели подповерхностной среды с использованием беспилотной электромагнитной системы являются μ-ЗСБ и мЗСБ, пространственная область исследования которых - это верхняя часть геологической среды, где сосредоточены наиболее рентабельно извлекаемые залежи полезных ископаемых и могут находиться потенциально опасные объекты и развиваться процессы с реальной вероятностью катастрофического завершения. В указанных технологиях задействован микросекундный масштаб времен исследования электродинамики. Для точного прогноза состояния среды необходим учет формы зондирующего импульса, поляризационных эффектов, геометрии приемно-генераторных конструкций, их амплитудно-частотных характеристик, «тока смещения», взаимоиндукции источника и среды и др.
Из уровня техники известен СПОСОБ АЭРОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ [RU 2652655 C1, опубл. 28.04.2018], включающий воздействие на геологическую среду источником электромагнитного поля и синхронную регистрацию сигналов вторично индуцированных в геологической среде вихревых токов с помощью системы электромагнитной съемки, буксируемой с помощью летательного аппарата, определение по измеренным сигналам геоэлектрических параметров среды, отличающийся тем, что регистрацию сигналов от вторично индуцированных в геологической среде вихревых токов осуществляют группой приемных антенн, установленных с разносами относительно друг друга по высоте или по высоте и латерали, значения указанных разносов определяют в соответствии с предварительно получаемой зависимостью максимальных значений относительных аномалий ВП и/или СПМ компонент сигнала, вычисленных по априорным данным об исследуемом объекте, от значений вышеуказанных разносов между приемными антеннами, после чего для каждой точки измерений осуществляют совместную обработку всех зарегистрированных сигналов с разделением на индукционную, ВП и/или СПМ составляющие, а УСТРОЙСТВО ДЛЯ АЭРОЭЛЕКТРОРАЗВЕДКИ, характеризующееся тем, что оно содержит буксируемую с помощью летательного аппарата электромагнитную систему, включающую генераторный контур и группу приемных антенн, регистрирующих сигналы от вторично индуцированных в геологической среде вихревых токов, при этом приемные антенны в указанной группе, установлены с разносами относительно друг друга по высоте или по высоте и латерали, минимальные значения указанных разносов определяют в соответствии с предварительно получаемой зависимостью максимальных значений относительных аномалий ВП и/или СПМ компонент сигнала, вычисленных по априорным данным об исследуемом объекте, от значений разносов между приемными антеннами, исходя из заданного уровня определяемой аномалии.
Также известен СПОСОБ АЭРОЭЛЕКТРОРАЗВЕДКИ С ПРИМЕНЕНИЕМ ЛЕГКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА [RU 2736956 C1, опубл. 23.11.2020], заключающийся в установке электроразведочного измерителя на воздушном судне, а электроразведочного генератора на земле, включающий регистрацию магнитных и электрических компонент поля с помощью незаземленных рамок и антенн, отличающийся тем, что в качестве воздушного судна используется легкий беспилотный летательный аппарат, съемка производится при движении БПЛА на автопилоте по предварительно подготовленному и соответствующему постоянной высоте БПЛА над рельефом (от 3 метров) полетному заданию, скорость движения БПЛА может изменяться от 0 до 20 м/с, измерения и запись кривых изменения вторичной электродвижущей силы или вертикальных и горизонтальных компонент электромагнитного поля производятся в автоматическом режиме, а пространственная привязка точек измерений осуществляется средствами спутниковой навигационной системы.
Недостатком аналога является использование наземной генераторной линии или петли. При использовании генераторной петли малого размера потребуется ее частое перемещение на исследуемой площади, а при использовании петли больших размеров теряется разрешающая способность (детальность и точность) съемки верхней части разреза. В любом случае трудоемкость разведочных работ существенна, так как для производства работ требуется отдельная бригада сотрудников, отвечающая за раскладку петли на земле, что удорожает стоимость и понижает скорость производства работ.
Также известны использующиеся на данный момент аэроэлектроразведочные комплексы Geotech VTEM, ZTEM (geotech.ca), российские комплексы «Импульс-Аэро», «Экватор» и другие подобные, реализующие методы переходных процессов.
Известно, что при расположении приемной петли в центре генераторной петли, сигнал прямого поля источника может превышать полезный сигнал от среды в десятки и сотни раз. Для подавления прямого поля источника в вертолетных системах используется либо геометрическая компенсация как в УСТРОЙСТВЕ И СПОСОБЕ АЭРОФИЗИЧЕСКОЙ РАЗВЕДКИ [патент RU 2557354 C1, опубл. 20.07.2015], либо компенсация с помощью отведения тока в специально сконструированный компенсационный виток как в КОМПЕНСАЦИОННОЙ КАТУШКЕ И СИСТЕМЕ ДЛЯ ИЗМЕРЕНИЙ В-ПОЛЯ И УСТРОЙСТВЕ ДЛЯ ВРЕМЕННЫХ ЭЛЕКТРОМАГНИТНЫХ ИЗМЕРЕНИЙ [RU 2557370 C2, опубл. 29.07.2015] или в СПОСОБЕ ВЫСОКОТОЧНЫХ ЭЛЕКТРОМАГНИТНЫХ ЗОНДИРОВАНИЙ И УСТРОЙСТВЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ [RU 2629705, опубл. 31.08.2017].
Наиболее близким по технической сущности является ВЕРТОЛЕТНАЯ СИСТЕМА ЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ [RU 2358294 C2, опубл. 10.06.2009], содержащая устройство генераторной петли, прикрепленное к буксировочному летательному аппарату и приспособленное для буксировки этим аппаратом, передающее средство, размещаемое в устройстве генераторной петли для генерации первичного электромагнитного поля, приемное средство, предназначенное для приема первичного электромагнитного поля и вторичного результирующего электромагнитного поля, которое возникает в результате взаимодействия первичного поля с подземными проводящими объектами, над которыми перемещается буксировочный летательный аппарат, и гондолу с высоким аэродинамическим сопротивлением, прикрепленную к устройству генераторной петли и буксировочному летательному аппарату с возможностью буксировки ими и содержащую корпус для размещения приемного средства, жесткий наконечник, отходящий от корпуса и обеспечивающий присоединение гондолы к устройству генераторной петли, и узел вилки, отходящей от корпуса и обеспечивающей присоединение гондолы к буксировочному летательному аппарату, при этом обеспечивается поддержание по существу постоянного пространственного и углового расположения приемного средства по отношению к передающему средству в диапазоне воздушных скоростей проведения электромагнитной разведки.
Вышеуказанные способы и комплексы основаны на использовании пилотируемого воздушного судна (например, вертолеты типа МИ-8, Eurocopter AS350), на котором устанавливается генераторное и измерительное оборудование, а на подвеске буксируются и генераторный и приемные контуры.
Основной технической проблемой аналогов и прототипа являются высокие затраты на мобилизацию и использование воздушного судна, невозможность точного обтекания сильно пересеченного рельефа, что приводит к завышению высоты полета и, как следствие, потере разрешающей способности (детальности и точности) съемки.
Технический результат изобретения заключается в обеспечении возможности создания способа для определения смещения приемника сигналов относительно источника электромагнитного поля, реализуемых с помощью беспилотной электромагнитной системы для проведения объемной реконструкции электрофизической модели подповерхностной среды.
Указанный технический результат достигается за счет того, что способ определения смещения приемников сигналов относительно источника электромагнитного поля беспилотной электромагнитной системы при проведении объемной реконструкции электрофизической модели подповерхностной среды реализуют с использованием беспилотной электромагнитной системы, включающей буксируемые с помощью беспилотных летательных аппаратов источник электромагнитного поля и расположенные со смещением по вертикали и латерали относительно источника электромагнитного поля приемники сигналов, выполненные с возможностью регистрации первичного электромагнитного поля от источника и вторично индуцированных в геологической среде вихревых токов, при этом для определения смещения по латерали и вертикали приемников сигналов относительно источника электромагнитного поля при проведении объемной реконструкции электрофизической модели подповерхностной среды:
формируют референтную модель исследуемой подповерхностной среды, для чего:
измеряют сигналы переходного процесса среды Eр(t) на нулевой высоте по профилю x0 от центра источника электромагнитного поля до разноса не менее трех диаметров индуктора источника электромагнитного поля,
определяют временную асимптотическую зону, где измеряемый сигнал не зависит от геометрии системы «источник-приемник» и прямого поля от источника электромагнитного поля (Та),
в диапазоне времен t > Та методом решения обратной задачи определяют электрическое сопротивление геологической среды ρ,
определяют методом решения прямой электродинамической задачи значения сигналов переходного процесса от среды на временах и разносах влияния прямого поля источника электромагнитного поля,
после формирования референтной модели измеряют сигналы переходного процесса прямого поля Ed источника электромагнитного поля на высоте z0, на которой сигнал от среды пренебрежительно мал,
определяют время t из значений глубины реконструкции электрофизической модели подповерхностной среды H = 790 √ρt,
рассчитывают сигналы Em(t, dx, dz) переходного процесса от референтной модели среды на расстояниях x и z относительно центра источника электромагнитного поля,
рассчитывают отношение сигнала среды Em(t, dx, dz) к сигналу прямого поля Ed(t, dx, dz), при этом сигнал прямого поля источника электромагнитного поля Ed в положении приемников сигналов относительно источника электромагнитного поля x0, z0 пересчитывают в позицию (dx, dz) согласно закону Био-Савара,
строят диаграмму отношения сигналов Em(t) от полупространства с электрическим сопротивлением геологической среды ρ к сигналам Ed(t) прямого поля источника электромагнитного поля,
по диаграмме определяют смещение по латерали ( ) и вертикали (
) и вертикали ( ), при которых сигнал от среды будет составлять не менее 10 % абсолютного значения сигнала прямого поля индуктора.
), при которых сигнал от среды будет составлять не менее 10 % абсолютного значения сигнала прямого поля индуктора.
Мультиракурсная беспилотная электромагнитная система для объемной реконструкции электрофизической модели подповерхностной среды, характеризующаяся тем, что содержит источник электромагнитного поля, выполненный в виде петлевого индуктора, представляющего собой генераторную петлю и коммутатор тока, формирующий последовательность зондирующих импульсов тока с заданными в коммутаторе амплитудой и длительностями тока и паузы, и расположенные на равном расстояние по латерали и в одном эшелоне относительно источника электромагнитного поля приемники сигналов, выполненных с возможностью регистрации первичного электромагнитного поля индуктора и вторично индуцированных в геологической среде вихревых токов, выполненные в виде приемных антенн и регистраторов сигналов, при этом источник электромагнитного поля и каждый из приемников сигналов смонтированы на беспилотных летательных аппаратах (БЛА), по одному на источник и каждый из приемников, при этом БЛА источника электромагнитного поля и приемников сигналов мультиракурсной беспилотной электромагнитной системы выполнены с возможностью совершения совместного и одновременного синхронного полета.
В частности, совместный полет источника электромагнитного поля и приемников сигналов осуществляется с сохранением взаимных расстояний по вертикали z и латерали x.
В частности, совместный полет источника электромагнитного поля и приемников сигналов осуществляется с изменением расстояний по вертикали z и латерали x и с фиксацией изменений расстояний в процессе полета.
В частности, совместный полет источника электромагнитного поля и приемников сигналов осуществляется с изменением расстояний по вертикали z и латерали x, при этом сначала устанавливается минимально допустимое значение z, а затем значение х, соответствующее допустимому расстоянию сближения с индуктором.
В частности, система выполнена с возможностью управления по полетному заданию, записанному в БЛА источника электромагнитного поля и приемников сигналов.
В частности, система выполнена с возможностью управления с наземной станции управления.
В частности, в качестве носителей источника электромагнитного поля и приемников сигналов используют БЛА однороторного, мультироторного, гибридного типа.
В частности, источник электромагнитного поля снабжен модулем привязки с возможность привязки на местности и ко времени.
В частности, источник электромагнитного поля смонтирован на БЛА на подвесе.
В частности, приемник сигналов снабжен модулем привязки с возможность привязки на местности и ко времени.
В частности, приемная антенна приемника сигналов смонтирована на БЛА на подвесе.
Краткое описание чертежей
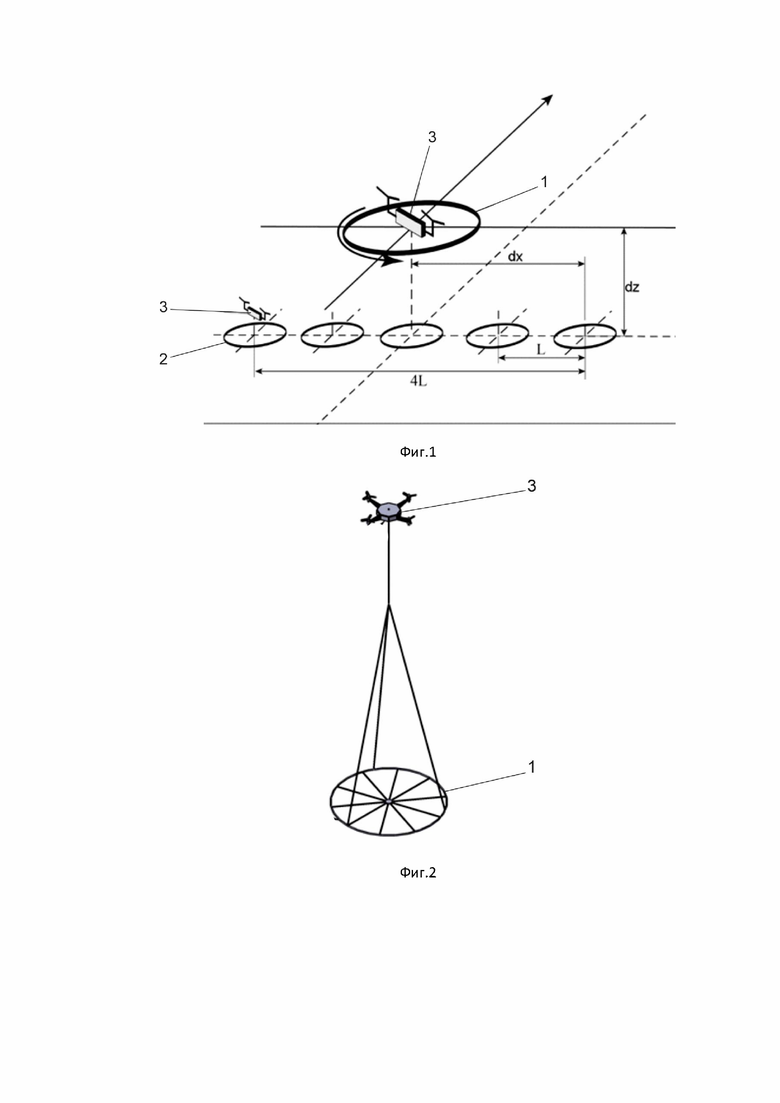
На фиг.1 показан схематично пример реализации мультиракурсной беспилотной электромагнитной системы с пятью приемниками сигналов.
На фиг.2 показан схематично источник электромагнитного поля на БЛА.
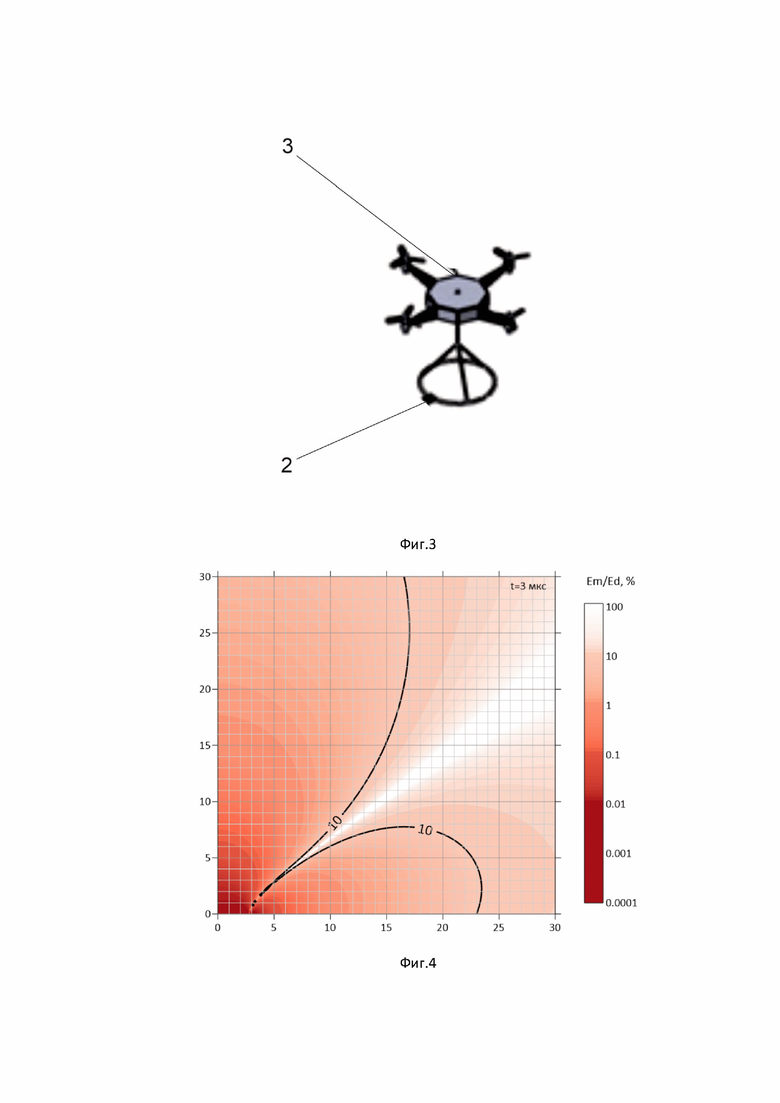
На фиг.3 показан схематично приемник сигналов на БЛА.
На фиг.4 показана диаграмма отношения сигналов Em(t) от полупространства к сигналам Ed(t) прямого поля индуктора.
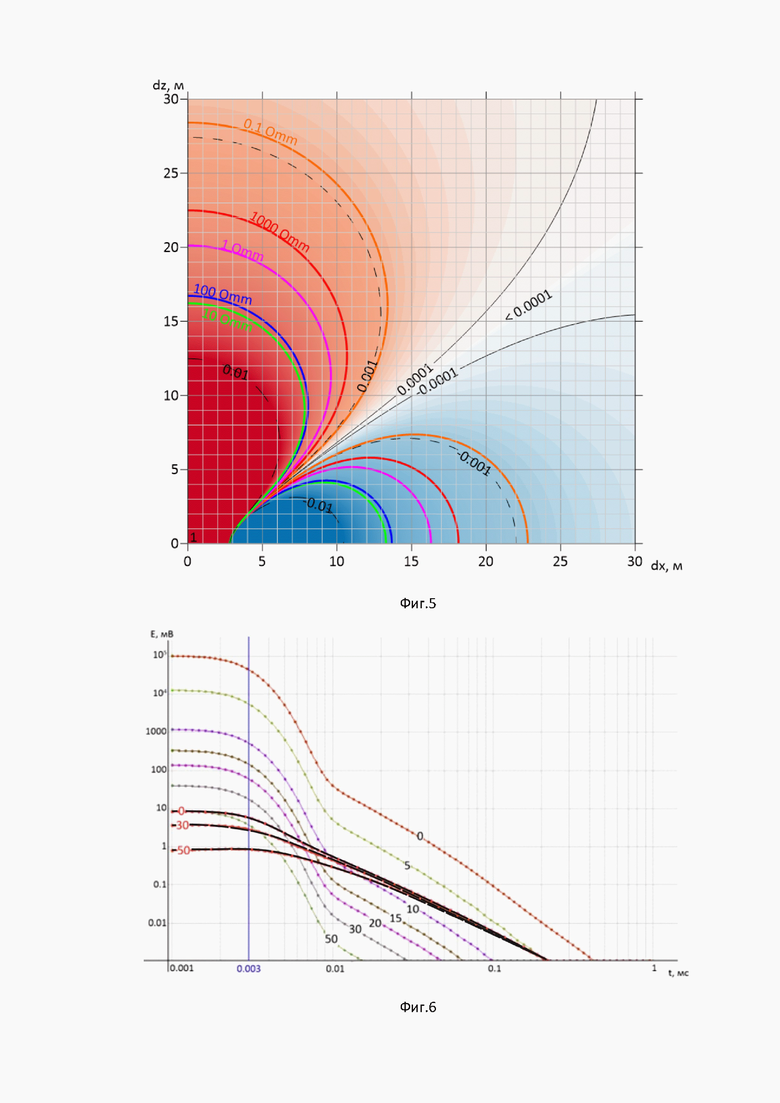
На фиг.5 показано распределение коэффициента подавления прямого поля K(dx, dz) для различных положений БПА приемников сигналов относительно индуктора для различного сопротивление среды.
На фиг. 6 показаны графики сигналов Em(t) переходного процесса от полупространства ρ и сигналы Ed(t) становления поля выключения тока индуктора на рабочей высоте индуктора 30 м, при расположении приемника сигналов в плоскости индуктора, при t=3 мкс (вертикальная линия).
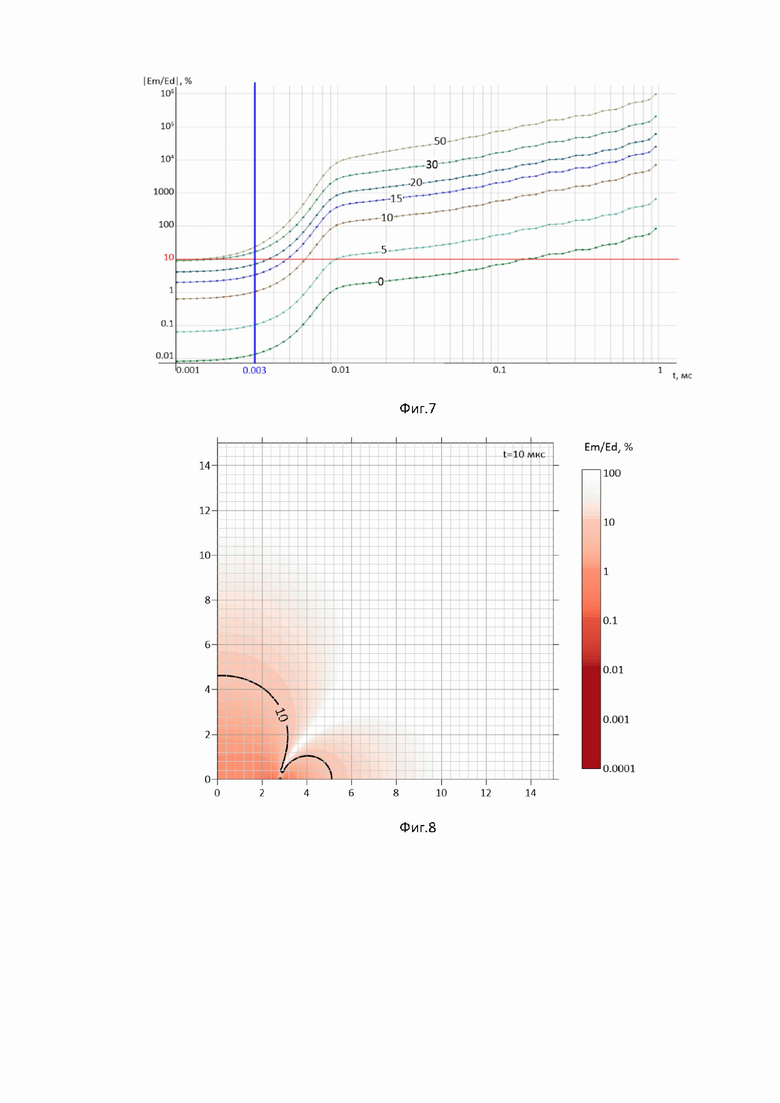
На фиг.7 показаны графики отношения сигнала среды к сигналу прямого поля для различного положения приемника сигналов относительно индуктора.
На фиг.8 показана диаграмма отношения сигналов Em(t) от полупространства ρ =100 Ом⋅м к сигналам Ed(t) прямого поля индуктора, %. t = 10 мкс, Высота полета – 30 м.
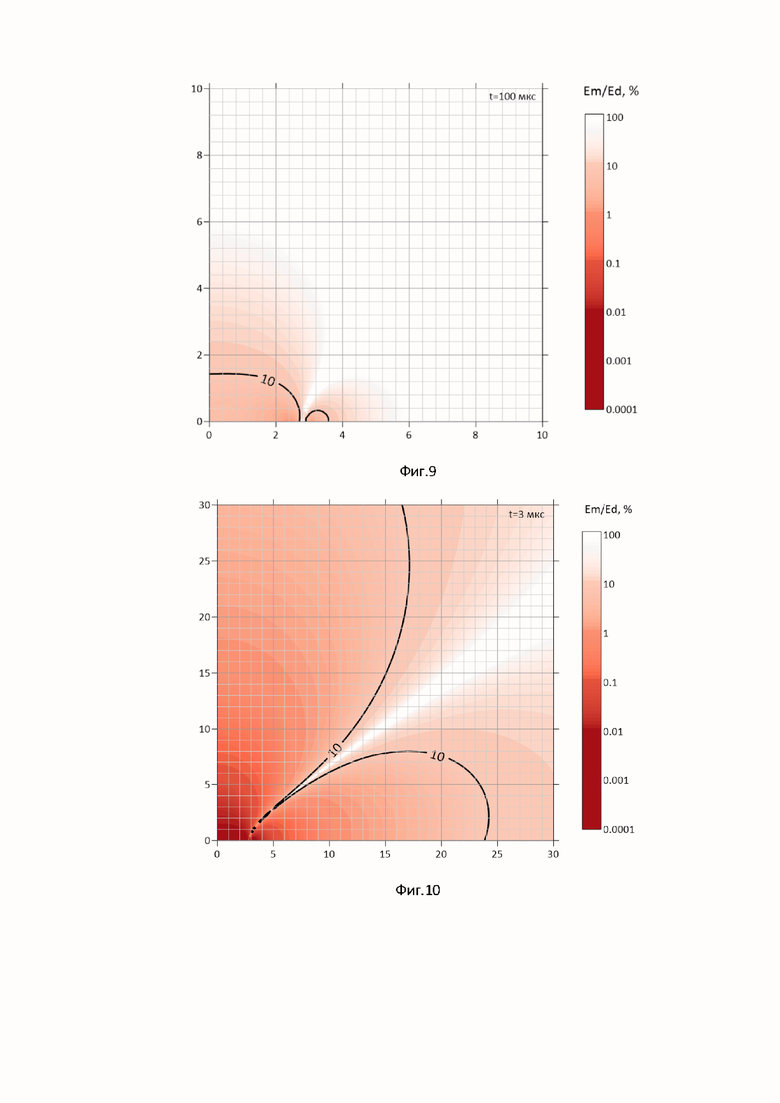
На фиг.9 показана диаграмма отношения сигналов Em(t) от полупространства ρ =100 Ом⋅м к сигналам Ed(t) прямого поля индуктора, %. t = 100 мкс, Высота полета – 30 м.
На фиг.10 показана диаграмма отношения сигналов Em(t) от полупространства ρ =1000 Ом⋅м к сигналам Ed(t) прямого поля индуктора, %. t = 3 мкс, Высота полета – 30 м.
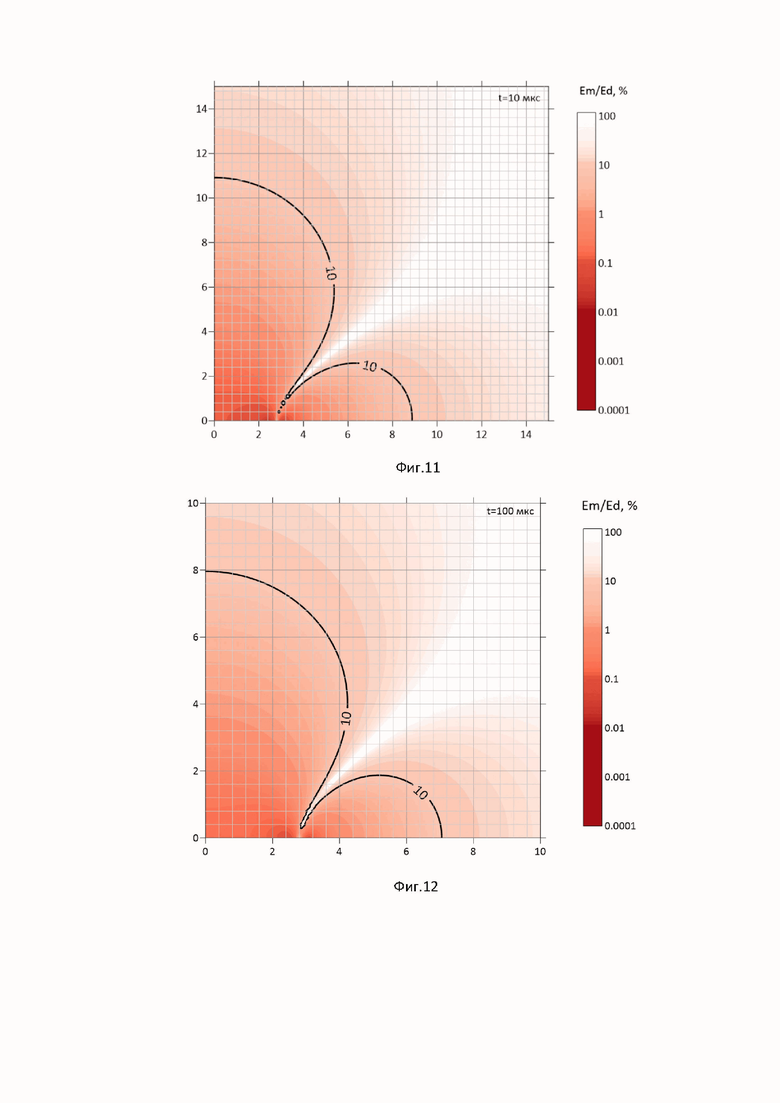
На фиг.11 показана диаграмма отношения сигналов Em(t) от полупространства ρ =1000 Ом⋅м к сигналам Ed(t) прямого поля индуктора, %. t = 10 мкс, Высота полета – 30 м.
На фиг.12 показана диаграмма отношения сигналов Em(t) от полупространства ρ =1000 Ом⋅м к сигналам Ed(t) прямого поля индуктора, %. t = 100 мкс, Высота полета – 30 м.
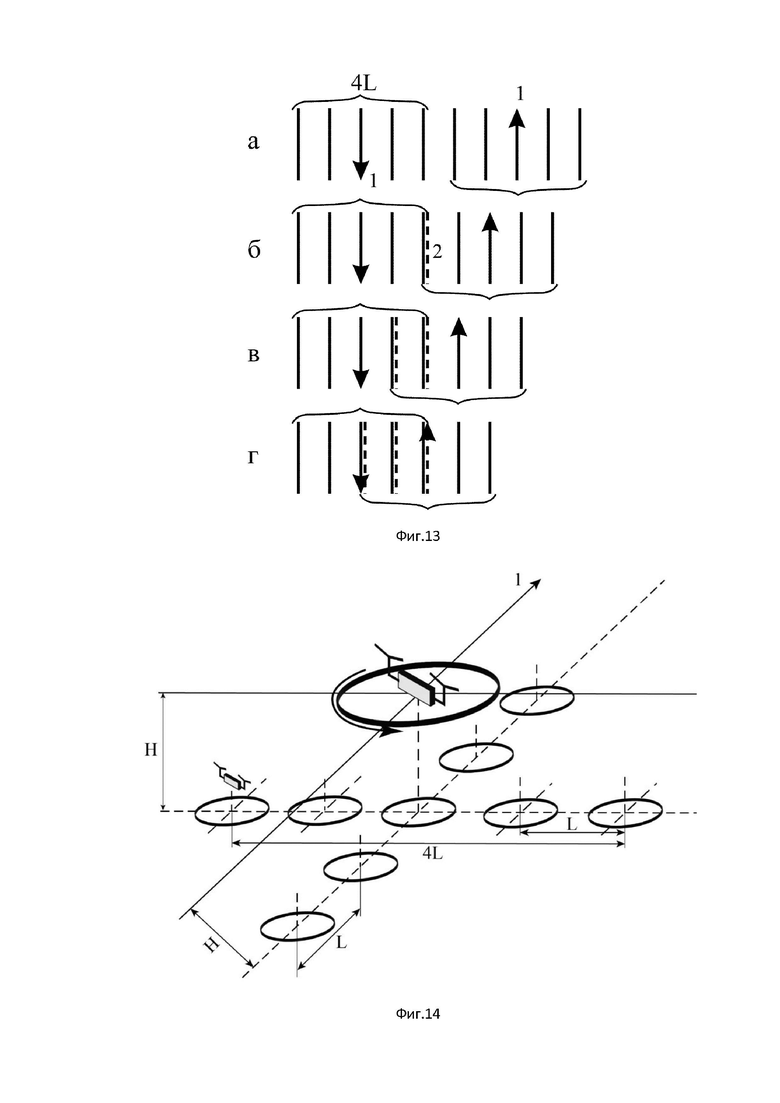
На фиг.13 показано схематично перекрытие траекторий движения мультиракурсной беспилотной электромагнитной системы.
На фиг.14 показано схематично расположение элементов мультиракурсной беспилотной электромагнитной системы для формирования стартовой апертуры в виде ортогонального креста.
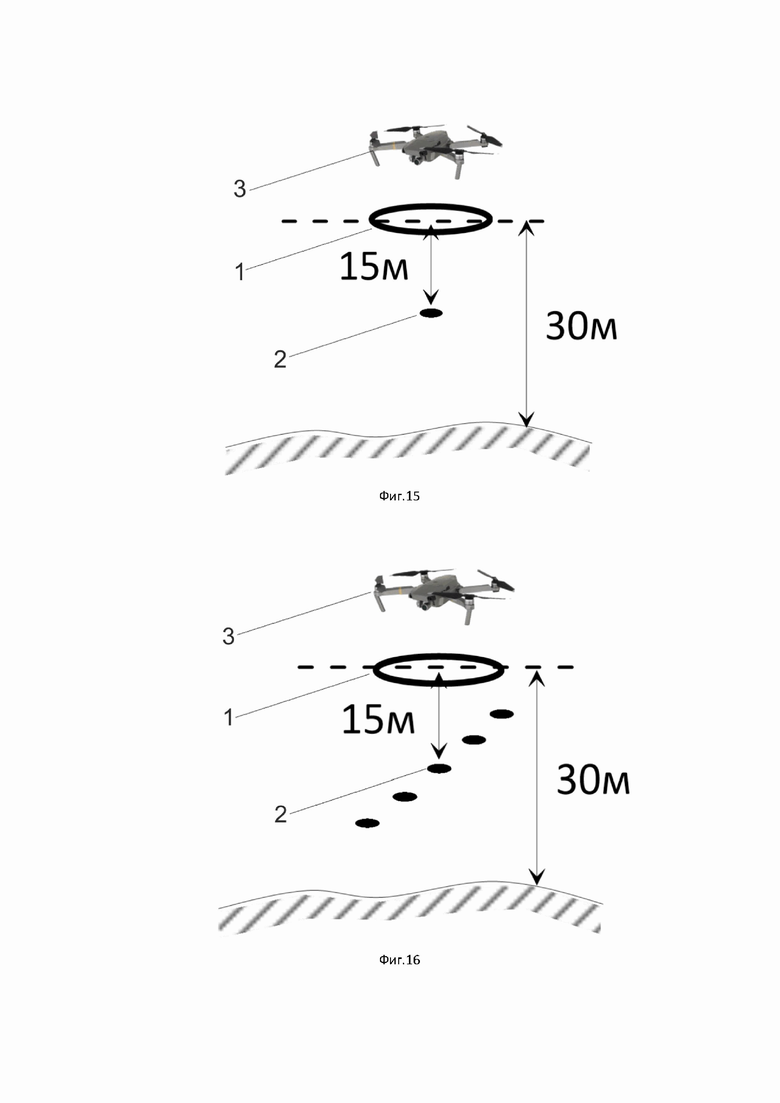
На фиг.15 схематично расположение элементов беспилотной электромагнитной системы с одним приемников сигналов для проведения эксперимента.
На фиг.16 схематично расположение элементов мультиракурсной беспилотной электромагнитной системы с пятью приемниками сигналов для проведения эксперимента.
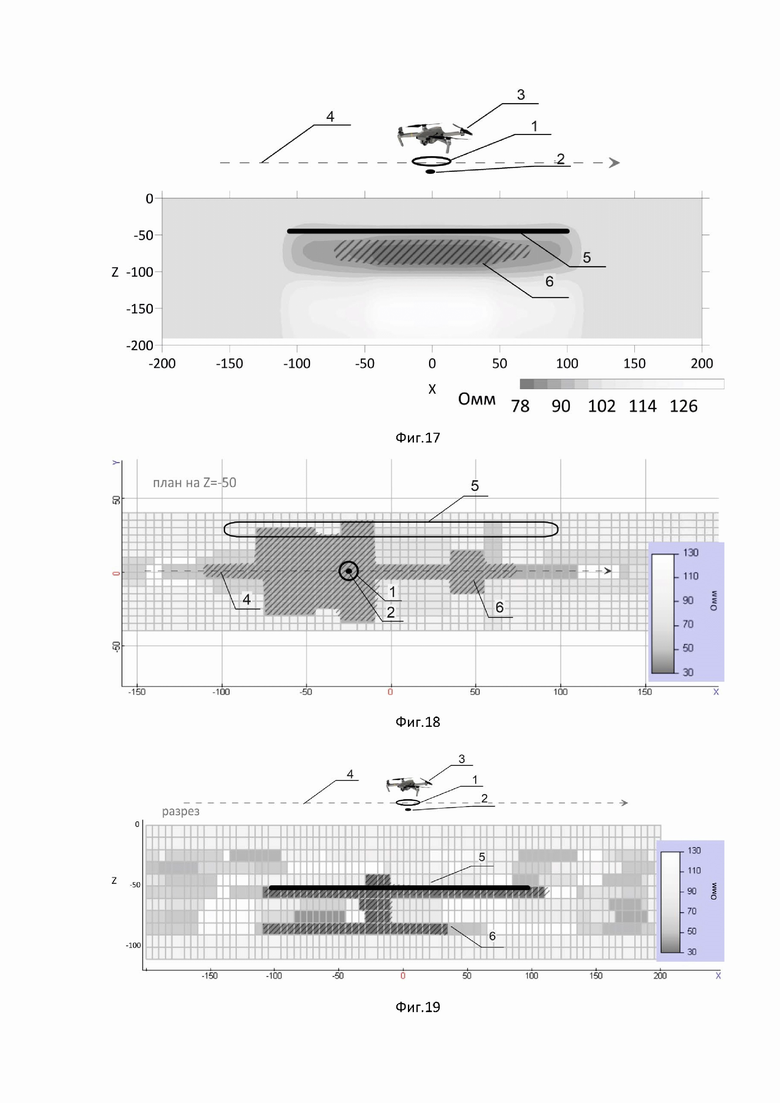
На фиг.17 показана результат 1D-нверсии по профилю для электромагнитной системы с одним приемников сигналов в ходе проведения эксперимента.
На фиг.18 показан результат 3D-инверсии данных съемки по профилю электромагнитной системы с одним приемников сигналов при прохождении профиля сбоку от объекта (план на отметке Z=-50 м).
На фиг.19 показан результат 3D-инверсии по профилю для беспилотной электромагнитной системы с одним приемником сигналов.
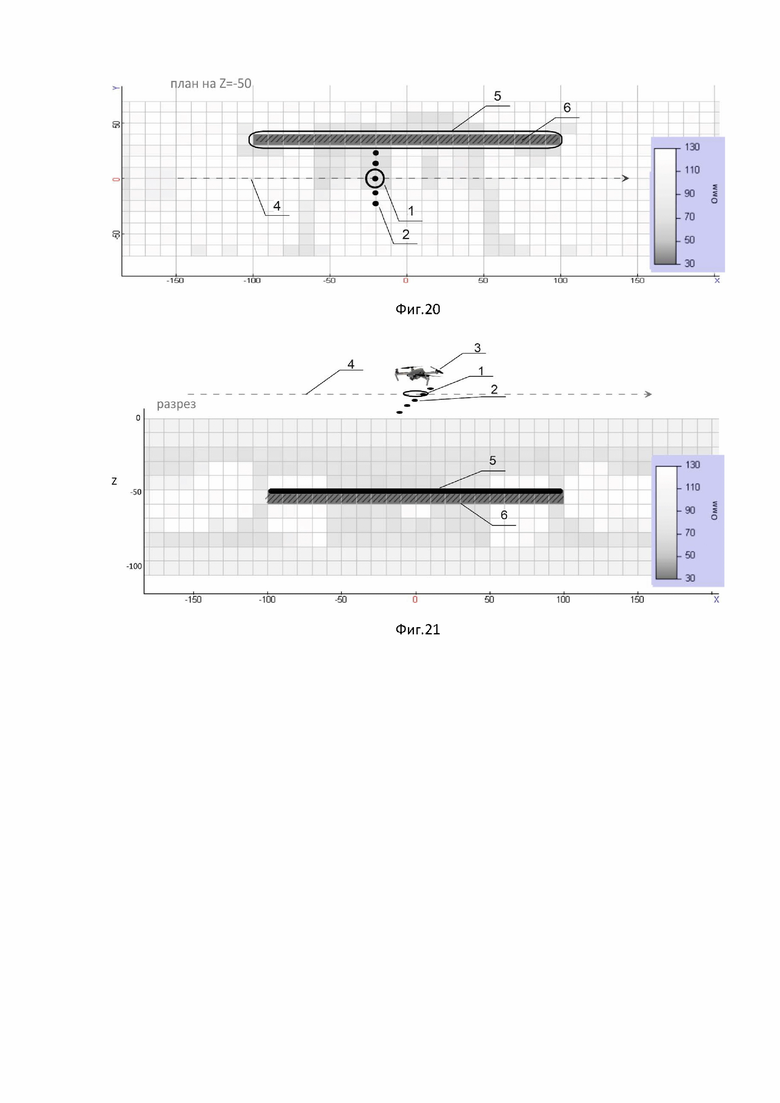
На фиг.20 показан результат 3D-инверсии по профилю для мультиракурсной беспилотной электромагнитной системы с пятью приемниками сигналов при прохождении профиля сбоку от объекта (план на отметке Z=-50 м).
На фиг.21 показан вертикальный разрез сопротивлений по линии полета для мультиракурсной беспилотной электромагнитной системы с пятью приемниками сигналов при прохождении профиля сбоку от объекта (план на отметке Z=-50 м).
На фигурах обозначено: 1 - источник электромагнитного поля, 2 - приемники сигналов, 3 - беспилотные летательные аппарата (БЛА), 4 - профиль измерений, 5 - целевой объект, 6 - инверсионный образ объекта.
Осуществление изобретения
Сущностью заявленного изобретения является обеспечение возможности объемной реконструкции электрофизической модели подповерхностной среды путем проведения электромагнитной разведки методом переходных процессов становлением поля во временной области с электромагнитным каналом грунтопроникающей способностью до глубин 50-100 м в реальных проводящих средах с использованием мультиракурсной беспилотной электромагнитной системы.
Предлагаемый способ может быть использован при выполнении поисковых, оценочных, разведочных и научно-исследовательских геологических работ, при геологическом картировании.
Под технологией объемной реконструкции в настоящем изобретении понимается приведение в соответствие экспериментальных εе(x, y, t) и теоретических εs(x, y, t) значений отклика исследуемой среды во всей пространственно-временной области апертуры одновременно для всех положений приемно-генераторной конструкции путем дискретного подбора объемного распределения проводимости в геологической среде, т. е. минимизацию функционала:

При сопоставлении теоретических и полевых данных в процессе подбора 3D-объектов предполагается, что теоретические данные получают в результате расчетов по точным математическим моделям. Невязка минимизации при подборе 3D-модели для решения практических задач не должна превышать 5%.
Мультиракурсная беспилотная электромагнитная система включает в себя источник электромагнитного поля 1 и, по крайней мере, пару приемников сигналов 2. Носителями упомянутых источника 1 и приемников 2 являются беспилотные летательные аппараты (БЛА) 3, по одному на источник 1 и каждый из приемников 2.
На фиг.1 показан вариант мультиракурсной беспилотной электромагнитной системы, включающей в себя один источник электромагнитного поля 1 и пять приемников сигналов 2, носителями которых являются в общей сложности шесть беспилотных летательных аппаратов 3.
Источник электромагнитного поля 1 (см. Фиг.2) выполнен в виде индуктора, представляющего собой генераторную петлю и коммутатор тока, формирующий в индукторе последовательность зондирующих импульсов тока с заданными амплитудой тока и длительностями тока и паузы.
Источники электромагнитного поля могут использоваться различных типов, отличающиеся мощностью, магнитным моментом индуктора и размерами. Могут использоваться источники электромагнитного поля 1 с диаметром индуктора, например, 3,2 м, 5,6 м, 11,4 м. Каждая из систем имеет собственные конструктивные особенности и может использоваться с различными типами систем регистрации данных и различными носителями в зависимости от поставленных задач.
В качестве носителей в мультиракурсной беспилотной электромагнитной системе могут применяться БЛА однороторного, мультироторного или гибридного типа, удовлетворяющие требованиям эксплуатации и существующие на рынке. Для решения поставленных задач преимущественно могут использоваться БЛА грузоподъемностью до 5 кг - легкие системы, до 15 кг - системы среднего уровня, до 40 кг - тяжелые системы.
В качестве варианта реализации, для объемной реконструкции может применяться легкая мультиракурсная беспилотная электромагнитная система, состоящая из источника электромагнитного поля 1 с диаметром индуктора 3,2 или 5,6 м, приемников сигналов 2 диаметром 0,8 м с регистратором. БЛА 3 мультироторного типа для источника электромагнитного поля 1 и приемников сигналов 2 для указанной системы грузоподъемностью до 5 кг.
Источник электромагнитного поля 1 снабжен модулем привязки (на фигурах не показан) с возможностью привязки на местности (геолокация) и ко времени упомянутого источника 1 и источником питания (на фигурах не показан), выполненного в виде аккумулятора для обеспечения автономной работы БЛА и источника электромагнитного поля 1.
Источник электромагнитного поля 1 может быть смонтирован как непосредственно на БЛА 3 источника, так и буксироваться на подвесе. В варианте реализации источника электромагнитного поля 1 на подвесе, модуль привязки смонтирован непосредственно на упомянутом источнике 1.
Источник питания может быть выполнен как отдельно для БЛА 3 и для источника электромагнитного поля 1, так и общим.
Приемники сигналов 2 (см. Фиг.3) выполнены с возможностью регистрации первичного электроомагнитного поля индуктора источника электромагнитного поля 1 и вторично индуцированных в геологической среде вихревых токов. Приемники сигналов 2 смонтированы, как описано выше, на отдельных БЛА 3, преимущественно того же типа и с теми же характеристиками, что и БЛА 3 источника электромагнитного поля 1, при этом каждый из приемников сигналов 2 выполнен в виде приемной антенны, представляющей собой петлю, подключенную к регистратору сигналов.
Приемник сигналов 2 снабжен модулем привязки (на фигурах не показан) с возможностью привязки на местности (геолокации) и ко времени упомянутого приемника сигналов 2. Питание приемника сигналов 2 осуществляется от источника питания, выполненного в виде аккумулятора.
Приемная антенна приемника сигналов 2 может быть смонтирована как непосредственно на БЛА 3 приемника сигналов, так и буксироваться на подвесе. В варианте реализации приемника сигналов 2 на подвесе, модуль привязки может быть смонтирован непосредственно на корпусе упомянутого приемника 2.
Источник питания может быть выполнен как отдельным для БЛА 3 и для приемника сигналов 2, так и общим.
Полетное задание для БЛА 3 источника электромагнитного поля 1 и приемников сигналов 2 формируют таким образом, чтобы их совместный и одновременный полет осуществлялся синхронно с сохранением расстояний по вертикали (эшелон) z и латерали x, либо с изменением расстояний по вертикали (эшелон) z и латерали x, фиксируемых в процессе полета в регистраторах приемников сигналов 2. Полетное задание записывают в контроллеры БЛА 3 источника электромагнитного поля 1 и приемников сигналов 2 или в наземную станцию управления БЛА 3 (на фигурах не показана).
Расстояние по латерали x и эшелон z положения приемников сигналов 2 относительно источника электромагнитного поля 1 для мультиракурсной беспилотной электромагнитной системы, включающей один источник электромагнитного поля 1 и несколько приемников сигналов 2 (см. Фиг.1) определяют в соответствии со следующим алгоритмом:
1) Формируют референтную модель исследуемой подповерхностной среды, для чего:
измеряют с помощью приемников сигналов 2 сигналы переходного процесса среды Eр (t) на нулевой высоте (поверхность земли) по профилю x0, начинающемся от центра индуктора до разноса не менее 3D, где D - диаметр индуктора;
определяют временную асимптотическую зону, где измеряемый сигнал не зависит от геометрии системы «источник-приемник» и прямого поля индуктора источника электромагнитного поля 1 (Та);
в диапазоне времен t > Та методом решения обратной задачи определяют электрическое сопротивление геологической среды ρ;
определяют методом решения прямой задачи значения сигналов переходного процесса от среды на временах и разносах влияния прямого поля индуктора источника электромагнитного поля 1.
2) Измеряют сигнал переходного процесса прямого поля индуктора источника электромагнитного поля 1 путем подъема источника электромагнитного поля 1 с помощью БЛА 3 на высоту z0, на которой сигнал от среды пренебрежительно мал, например, 500 м. Осуществляют запись переходного процесса прямого поля (Ed) в регистраторах приемников сигналов 2.
3) Определяют минимально достаточное время t исходя из требуемой глубины реконструкции электрофизической модели подповерхностной среды H (чем меньше начальная глубина H, тем меньше требуемое время t) из формулы для определения глубины:
H = 790 √ρt (1)
4) Рассчитывают сигналы (Em(t, dx, dz)) переходного процесса от референтной, восстановленной согласно пункту 1 алгоритма среды на рабочей высоте при расположении приемников сигналов 2 на расстоянии (dx, dz) относительно центра индуктора источника электромагнитного поля 1.
5) Рассчитывают отношение сигнала среды (Em(t, dx, dz)) к сигналу прямого поля (Ed(t, dx, dz)) по формуле (2), при этом сигнал прямого поля индуктора источника электромагнитного поля Ed, измеренный в соответствии с пунктом 2 алгоритма в положении приемников сигналов 2 относительно индуктора источника электромагнитного поля 1 (dx0, dz0), пересчитывают в позицию (dx, dz) согласно закону Био-Савара.:
 (2)
(2)
6) Строят диаграмму отношения сигналов Em(t) от полупространства с электрическим сопротивлением геологической среды ρ к сигналам Ed(t) прямого поля индуктора источника электромагнитного поля 1 (см. Фиг.4), где изолиния «10» показывает границу двухмерной области, за пределами которой сигнал от полупространства Em(t) будет превышать сигнал прямого поля индуктора Ed(t) более чем на 10% сигнала прямого поля индуктора.
7) По диаграмме определяют смещение по латерали () (ось абсцисс) и вертикали () (ось ординат), при которых сигнал от среды (Em) будет составлять не менее 10 % абсолютного значения сигнала прямого поля индуктора (Ed), т.е.
На фиг.5 показано распределение коэффициента подавления прямого поля K(dx, dz) для различных положений БПА 3 приемников сигналов 2 относительно индуктора источника электромагнитного поля 1 для различного сопротивление среды ρ.
В качестве примера на фиг.6-12 показаны графики сигналов Em(t) переходного процесса от полупространства ρ и сигналы Ed(t) становления поля выключения тока индуктора на рабочей высоте индуктора 30 м, при расположении приемника сигналов в плоскости индуктора, при t=3 мкс (см. Фиг.6), модуль отношения сигналов Em(t) от полупространства ρ =100 Ом⋅м к сигналам Ed(t) прямого поля индуктора и диаграммы отношения сигналов Em(t) от полупространства с различным сопротивлением ρ к сигналам Ed(t) прямого поля индуктора, %, при высоте полета 30 м и различных t для мультиракурсной беспилотной электромагнитной системы с источником электромагнитного поля 1, индуктор которой выполнен диаметром D = 5,6 м.
Минимальная апертура (sample) для объемной реконструкции с использованием беспилотной электромагнитной системы - это две точки измерения в окрестности индуктора, что обеспечивает минимальный мультиракурс. Причем для оценки поляризационных эффектов разнос «центр индуктора - приемник» должен быть тоже разной геометрии. Если приемник сигналов 2 и источник электромагнитного поля 1 находятся в одном эшелоне, то упомянутые приемники 2 рационально располагать на условной линии проекции диаметра индуктора во втором, более низком эшелоне, находящемся на дистанции, например, не менее 10 м. Рационально в этом случая определить апертуру, состоящую, например, из пяти точек (См. фиг.1).
При синхронном движении с источником электромагнитного поля 1 указанной пятиточечной линейной апертуры, сохраняя в заданных параметрах геометрию роя заданной траектории полета, получают площадную апертуру неограниченной длины с шириной 4L, где L - расстояние между соседними приемниками в линейной апертуре. Дистанцию между эшелонами определяют смещением по оси x () и оси z (вертикали) (), при которых сигнал прямого поля источника электромагнитного поля превышает средний отклик  от среды не более чем в N, например, 10 раз:
от среды не более чем в N, например, 10 раз:
Оценка количества независимых ракурсов при импульсной диаграмме 1 мс - ток, 3 мс - пауза, время парной разности - 8 мс, частота опроса 125 кГц, скорость 15 км/час (4.167м/сек, ΔL = 12.5 м, L =50 м, τ 50 = 12 сек, N angle = 12 c/8 мс =1500, пространственная плотность - 0.033 м. Это оценка для каждой строки апертуры 50 × 50 м, а с учетом пяти треков получают 7500 независимых ракурсов объекта
Дополнительно для повышения мультиракурсности съемки соседние апертуры могут формироваться с перекрытием предыдущей путем сдвига последующей траектории источника электромагнитного поля 1 в направлении предыдущей его траектории на дистанцию кратной расстоянию между соседними приемниками сигналов 2 L (см. Фиг. 13). Так при расстоянии между ближними пролетами источника электромагнитного поля 1 в 50 м (см. Фиг. 6б) на апертуре 50 × 50 м получают один профиль с удвоенным мультиракурсом в 3000. При расстоянии между ближними пролетами источника электромагнитного поля 1 в 25 м (см. Фиг.13г) на апертуре 25 × 50 м получают три профиля с удвоенным мультиракурсом в 3000.
Сдвиг линий пролета индуктора в сторону сближения траекторий источника электромагнитного поля 1 на L, 2L, 3L позволяет увеличить мультиракурс до 3000 по одной траектории.
При формировании стартовой апертуры в виде ортогонального креста (см. Фиг. 14), получают гетерогенную по мультиракурсу апертуру с увеличенным числом независимых ракурсов облучения объекта на центральном треке, которое для рассмотренного свыше случая составит также 3000 ракурсов на 50 м траектории.
Основные этапы объемной реконструкции электрофизической модели подповерхностной среды с использование беспилотной электромагнитной системой, состоящей из пространственно-распределенных источника электромагнитного поля 1 и приемников сигналов:
- определение участков, соответствующих нормальному полю. В первой итерации нормальное поле - это поле слоистой среды, определенной в одной точке;
- расчет аномального поля во всей временной области регистрации;
- подбор геоэлектрической модели для остаточного аномального поля;
- построение аномальных полей и локализация слабых аномалий на поздних временах;
- подбор глубинных объектов и визуализация поисковых объектов по заявленным критериям;
- коррекция модели путем последовательного подбора более слабых отклонений во всей временной области;
- расчет и минимизация невязки решения обратной задачи путем уточнения модели для каждой точки регистрации в рамках единой математической модели среды, включающей искомые объекты, визуализация целевых объектов;
- построение объемной геоэлектрической модели, согласованной с априорными данными.
В 2023 году автором изобретения в ходе эксперимента проведена оценка эффективности беспилотной мультиракурсной электромагнитной системы для объемной реконструкции электрофизической модели подповерхностной среды.
В ходе эксперимента рассматривались два варианта беспилотной электромагнитной системы: первый - с одним приемником сигналов, второй - мультиракурсная система с пятью приемниками сигналов. В обоих вариантах источник электромагнитного поля 1 располагали на высоте 30 м от поверхности земли, приемники сигналов 2 располагали в эшелоне ниже индуктора на 15 м (см. Фиг.15, 16). В мультиракурсной системе расстояние между датчиками по горизонтали - 10 м. Ширина полосы захвата поперек линии профиля для мультиракурсной системы - 40 м.
Результаты геоэлектрической реконструкции среды беспилотной электромагнитной системой с одним приемником сигналов
Протяженный (вдоль профиля измерений) объект 200 × 10 × 5 м с сопротивлением 1 Ом*м. Верхняя кромка объекта находится на глубине 50 м от поверхности Земли. Результат 1D- и 3D-инверсий полученных данных беспилотной электромагнитной системы с одним приемником сигналов подбирается на завышенной глубине, превышающей истинную (см. Фиг.17).
В наиболее сложной ситуации для однодатчиковой системы при нахождении профиля сбоку от объекта будет наблюдаться значительное искажение результата реконструкции геоэлектрической модели (см. Фиг.18). На фиг.19 заштрихованная область - это ложный результат, который дает один датчик вместо реального положения целевого объекта.
На фиг.18 показан результат 3D-инверсии по профилю для беспилотной электромагнитной системы с одним приемником сигналов. Такую же смещенную оценку мы получаем и в разрезе (см. Фиг.19)
Результаты геоэлектрической реконструкции среды мультиракурсной беспилотной электромагнитной системой с пятью приемниками сигналов
Результаты эксперимента для мультиракурсной беспилотной электромагнитной системой с пятью приемниками сигналов, изображенный в виде плана распределения сопротивления на глубине -50 м и разреза сопротивлений по линии бокового профиля, показан на фиг.20, 21.
Из фиг.20, 21 видно, что инверсия данных совокупности пяти точек измерения восстанавливает объект как в плане (см. Фиг.20), так и по глубине (см. Фиг.21) корректно. Очевидно, что в горизонтально-неоднородной среде однодатчиковая система не позволяет устойчиво получить адекватный прогноз по целевому объекту.
На основании проведенного экспериментов можно сделать вывод, что мультиракурсная беспилотная электромагнитная система позволяет повысить эффективность локализации целевого объекта.
Очевидно, что в горизонтально-неоднородной среде однодатчиковая система не позволяет устойчиво получить адекватный прогноз по целевому объекту как по глубине, так и в плане. Однодатчиковая система дает смещенную оценку морфологии целевого объекта и последующее заверочное бурение может не обнаружить его. В этом случае будет сделан ошибочный вывод об его отсутствии.
На основании проведенного экспериментов можно сделать вывод, что мультиракурсная беспилотная электромагнитная система позволяет существенно повысить эффективность локализации целевого объекта с одновременным кратным повышением производительности исследований.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ аэроэлектроразведки и устройство для его осуществления | 2017 |
|
RU2652655C1 |
| Способ обнаружения границы локального подземного торфяного пожара и способ доставки на поверхность торфяника портативного георадара и приёма данных зондирования в режиме реального времени | 2016 |
|
RU2647221C2 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ В УСЛОВИЯХ ТЕХНОГЕННОЙ ИНФРАСТРУКТУРЫ | 2013 |
|
RU2528115C1 |
| СПОСОБ МОРСКОЙ ГЕОЭЛЕКТРОРАЗВЕДКИ И ИССЛЕДОВАТЕЛЬСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2557675C2 |
| Способ проведения геологоразведочных работ с использованием беспилотных воздушных средств | 2022 |
|
RU2805015C1 |
| Способ определения предвестников приближающегося сейсмического события на территории Бишкекского геодинамического полигона | 2024 |
|
RU2837367C1 |
| Способ высокоточных электромагнитных зондирований и устройство для его осуществления | 2016 |
|
RU2629705C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ С ОПТИМИЗАЦИЕЙ СИСТЕМЫ НАБЛЮДЕНИЙ | 2024 |
|
RU2836618C1 |
| СПОСОБ КОЛИЧЕСТВЕННОГО РАЗДЕЛЕНИЯ ЭФФЕКТОВ ЭЛЕКТРОМАГНИТНОЙ ИНДУКЦИИ И ВЫЗВАННОЙ ПОЛЯРИЗАЦИИ | 2008 |
|
RU2399931C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДАННЫХ ЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ | 2007 |
|
RU2423728C2 |
Изобретение относится к воздушной разведке полезных ископаемых с использованием магнитных полей, изменяемых объектом. Технический результат: обеспечение возможности объемной реконструкции электрофизической модели подповерхностной среды с использованием беспилотной электромагнитной системы. Сущность: мультиракурсная беспилотная электромагнитная система для объемной реконструкции электрофизической модели подповерхностной среды содержит источник электромагнитного поля и приемники сигналов. Источник электромагнитного поля выполнен в виде индуктора, представляющего собой генераторную петлю и коммутатор тока, формирующий в индукторе последовательность зондирующих импульсов тока с заданными в коммутаторе амплитудой и длительностями тока и паузы. Приемники сигналов выполнены в виде приемных антенн и регистраторов сигналов с возможностью регистрации первичного электромагнитного поля индуктора и вторично индуцированных в геологической среде вихревых токов. Источник электромагнитного поля и каждый из приемников сигналов смонтированы на беспилотных летательных аппаратах (БЛА), по одному на источник и каждый из приемников. БЛА источника электромагнитного поля и приемников сигналов выполнены с возможностью совершения совместного и одновременного синхронного полета. Приемники сигналов расположены в одном эшелоне со смещением по вертикали относительно источника электромагнитного поля и латерали относительно друг друга, при котором сигнал от среды составляет не менее 10 % абсолютного значения сигнала прямого поля индуктора. 2 н. и 7 з.п. ф-лы, 21 ил.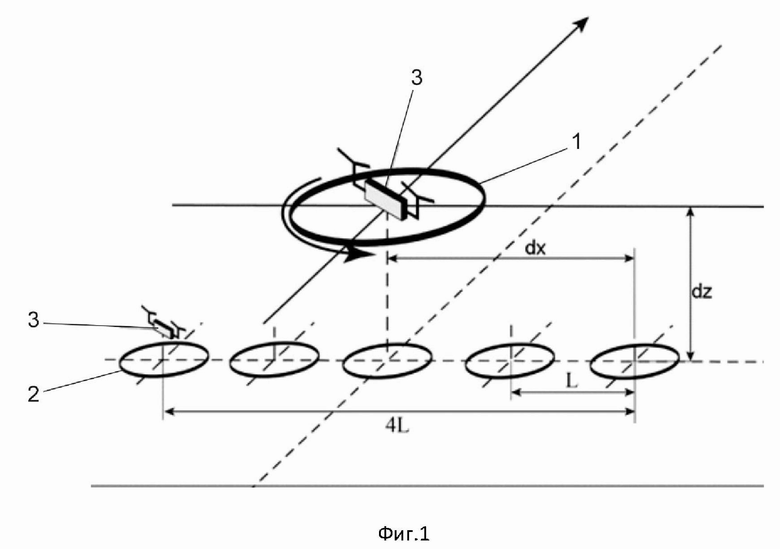
1. Способ определения смещения приемников сигналов относительно источника электромагнитного поля беспилотной электромагнитной системы при проведении объемной реконструкции электрофизической модели подповерхностной среды, реализуемый с использованием беспилотной электромагнитной системы, включающей буксируемые с помощью беспилотных летательных аппаратов источник электромагнитного поля и расположенные в одном эшелоне со смещением по вертикали относительно источника электромагнитного поля и латерали относительно друг друга приемники сигналов, выполненные с возможностью регистрации первичного электромагнитного поля от источника и вторично индуцированных в геологической среде вихревых токов, при этом для определения смещения по латерали и вертикали приемников сигналов при проведении объемной реконструкции электрофизической модели подповерхностной среды:
формируют референтную модель исследуемой подповерхностной среды, для чего:
измеряют сигналы переходного процесса среды Ep(t) на нулевой высоте по профилю x0 от центра источника электромагнитного поля до разноса не менее трех диаметров индуктора источника электромагнитного поля,
определяют временную асимптотическую зону, где измеряемый сигнал не зависит от геометрии системы «источник-приемник» и прямого поля от источника электромагнитного поля (Та),
в диапазоне времен t > Та методом решения обратной задачи определяют электрическое сопротивление геологической среды ρ,
определяют методом решения прямой задачи значения сигналов переходного процесса от среды на временах и разносах влияния прямого поля источника электромагнитного поля,
после формирования референтной модели измеряют сигналы переходного процесса прямого поля Ed источника электромагнитного поля на высоте z0, на которой сигнал от среды пренебрежительно мал,
определяют время t из значений глубины реконструкции электрофизической модели подповерхностной среды H = 790 √ρt,
рассчитывают сигналы  (t, dx, dz) переходного процесса от референтной модели среды на расстояниях x и z относительно центра источника электромагнитного поля,
(t, dx, dz) переходного процесса от референтной модели среды на расстояниях x и z относительно центра источника электромагнитного поля,
рассчитывают отношение сигнала среды (t, dx, dz) к сигналу прямого поля  (t, dx, dz), при этом сигнал прямого поля источника электромагнитного поля Ed в положении приемников сигналов относительно источника электромагнитного поля x0, z0 пересчитывают в позицию (dx, dz) согласно закону Био-Савара,
(t, dx, dz), при этом сигнал прямого поля источника электромагнитного поля Ed в положении приемников сигналов относительно источника электромагнитного поля x0, z0 пересчитывают в позицию (dx, dz) согласно закону Био-Савара,
строят диаграмму отношения сигналов Em(t) от полупространства с электрическим сопротивлением геологической среды ρ к сигналам Ed(t) прямого поля источника электромагнитного поля,
по диаграмме определяют смещение по латерали ( ) и вертикали (
) и вертикали ( ), при которых сигнал от среды будет составлять не менее 10 % абсолютного значения сигнала прямого поля индуктора.
), при которых сигнал от среды будет составлять не менее 10 % абсолютного значения сигнала прямого поля индуктора.
2. Мультиракурсная беспилотная электромагнитная система для объемной реконструкции электрофизической модели подповерхностной среды, характеризующаяся тем, что содержит источник электромагнитного поля, выполненный в виде индуктора, представляющего собой генераторную петлю и коммутатор тока, формирующий в индукторе последовательность зондирующих импульсов тока с заданными в коммутаторе амплитудой и длительностями тока и паузы, и выполненные с возможностью регистрации первичного электромагнитного поля индуктора и вторично индуцированных в геологической среде вихревых токов приемники сигналов, расположенные в одном эшелоне со смещением по вертикали относительно источника электромагнитного поля и латерали относительно друг друга, при котором сигнал от среды составляет не менее 10 % абсолютного значения сигнала прямого поля индуктора, приемники сигналов выполнены в виде приемных антенн и регистраторов сигналов, при этом источник электромагнитного поля и каждый из приемников сигналов смонтированы на беспилотных летательных аппаратах (БЛА), по одному на источник и каждый из приемников, при этом БЛА источника электромагнитного поля и приемников сигналов мультиракурсной беспилотной электромагнитной системы выполнены с возможностью совершения совместного и одновременного синхронного полета.
3. Система по п. 2, отличающаяся тем, что выполнена с возможностью управления по полетному заданию, записанному в БЛА источника электромагнитного поля и приемников сигналов.
4. Система по п. 2, отличающаяся тем, что выполнена с возможностью управления с наземной станции управления.
5. Система по п. 2, отличающаяся тем, что в качестве носителей источника электромагнитного поля и приемников сигналов используют БЛА однороторного, мультироторного, гибридного типа.
6. Система по п. 2, отличающаяся тем, что источник электромагнитного поля снабжен модулем привязки с возможностью привязки на местности и ко времени.
7. Система по п. 2, отличающаяся тем, что источник электромагнитного поля смонтирован на БЛА на подвесе.
8. Система по п. 2, отличающаяся тем, что приемник сигналов снабжен модулем привязки с возможностью привязки на местности и ко времени.
9. Система по п. 2, отличающаяся тем, что приемная антенна приемника сигналов смонтирована на БЛА на подвесе.
| US 20200159211 A1, 21.05.2020 | |||
| US 20210302613 A1, 30.09.2021 | |||
| US 20240134081 A1, 25.04.2024 | |||
| Способ аэроэлектроразведки с применением легкого беспилотного летательного аппарата | 2020 |
|
RU2736956C1 |

