Изобретение относится к области разведки месторождений полезных ископаемых, а также мониторинга территорий, и может быть использовано при проведении геологоразведочных работ, в частности, для проведения аэроэлектроразведки. Также изобретение может быть использовано при изучении глубинного геологического строения и структурно-геологического картирования.
Известен способ аэроэлектроразведки с применением легкого беспилотного летательного аппарата по патенту РФ №2736956 (дата публикации: 23.11.2020, МПК: G01V 5/02, G01S 13/88), заключающийся в установке электроразведочного измерителя на воздушном судне, а электроразведочного генератора на земле, включающий регистрацию магнитных и электрических компонент поля с помощью незаземленных рамок и антенн, при этом в качестве воздушного судна используется легкий беспилотный летательный аппарат (БПЛА), съемка производится при движении БПЛА на автопилоте по предварительно подготовленному и соответствующему постоянной высоте БПЛА над рельефом (от 3метров) полетному заданию, скорость движения БПЛА может изменяться от 0 до 20 м/с, измерения и запись кривых изменения вторичной электродвижущей силы или вертикальных и горизонтальных компонент электромагнитного поля производятся в автоматическом режиме, а пространственная привязка точек измерений осуществляется средствами спутниковой навигационной системы.
Общими признаками известного и заявленного изобретений являются использование БПЛА при электроразведке, проведение съемки при движении БПЛА по заданному маршруту.
Однако в известном техническом решении электроразведочный генератор устанавливается на земле (или может быть использована радиостанция с диапазоном длин волн от 1 до 300 кГц), поэтому производительность технического решения сильно ограничена, кроме того, при низком качестве сигнала от радиостанций снижается точность съемки. Также данный способ невозможно использовать в условиях сложной проходимости рельефа или ландшафта, при отсутствии радиостанции с диапазоном длин волн от 1 до 300 кГц.
Известна вертолетная система электромагнитной разведки по патенту РФ №2358294 (дата публикации: 10.06.2009, МПК: G01V 3/165), которая содержит устройство генераторной петли, которое соединено с вертолетом и буксируется им. Устройство генераторной петли снабжено передатчиком для генерации первичного электромагнитного поля. С устройством генераторной петли соединена гондола с высоким аэродинамическим сопротивлением, приспособленная для буксировки. Гондола снабжена приемником, предназначенным для приема первичного электромагнитного поля и вторичного результирующего электромагнитного поля, которое возникает в результате взаимодействия первичного поля с подземными проводящими объектами, над которыми перемещается вертолет. Гондола с высоким аэродинамическим сопротивлением связана с вертолетом и приспособлена для буксировки этим вертолетом так, чтобы положение приемника по отношению к передатчику оставалось практически постоянным.
Общими признаками известного и заявленного изобретений являются использование генераторной петли и приемника (измерителей) при проведении электроразведки с использованием одного летательного аппарата.
Однако в известном изобретении используют пилотируемый вертолет за счет чего увеличиваются затраты на мобилизацию летательного аппарата, сложность или невозможность полетов на низкой высоте и с обтеканием рельефа, высокая скорость полетов, что влияет на детальность и точность съемки, а также отсутствует стабилизирующее устройство, которое выполнено с возможностью компенсирования отклонения троса в вертикальной плоскости при движении летательного аппарата.
Известен способ аэроэлектроразведки и устройство для его осуществления по патенту РФ №2652655 (дата публикации: 28.04.2018, МПК: G01V 3/15), согласно которому регистрацию сигналов от вторично индуцированных в геологической среде вихревых токов осуществляют группой приемных антенн, установленных с разносами относительно друг друга по высоте или по высоте и латерали. После чего для каждой точки измерений осуществляют совместную обработку всех зарегистрированных сигналов с разделением на индукционную составляющую, вызванную поляризацию и/или супермагнитизм составляющие. Устройство для аэроэлектроразведки согласно изобретению характеризуется тем, что оно содержит буксируемую с помощью летательного аппарата электромагнитную систему, включающую генераторный контур и группу приемных антенн. Приемные антенны в указанной группе установлены с разносами относительно друг друга по высоте или по высоте и по латерали.
Общими признаками заявленного и известного изобретений являются использование генераторного контура, приемных антенн (измерителей) с использованием одного летательного аппарата.
Однако в известном техническом решении присутствуют дополнительные помехи, вызванные воздействием крена летательного аппарата на измерительную систему, что влияет на точность интерпретации геологической информации. И отсутствует стабилизирующее устройство, которое позволяет компенсировать отклонение троса в вертикальной плоскости при движении летательного аппарата.
Технической проблемой заявляемого технического решения является повышение эффективности проведения геологоразведочных работ, в частности, аэроэлектроразведки, совершенствование способа и устройства для проведения геологоразведочных работ.
Техническим результатом заявляемого изобретения является повышение точности и качества получаемой геологической информации об объекте исследования (участке), а также обеспечение возможности проведения работ в условиях сложного рельефа, снижение времени проведения геологоразведочных работ за счет компенсирования отклонения телескопического троса с измерителем и генераторной петлей при движении беспилотного воздушного средства.
Технический результат достигается за счет того, что устройство для проведения геологоразведочных работ включающее
беспилотное воздушное средство (БВС) и
измерительную систему, включающую:
- стабилизирующее устройство, установленное на БВС,
- телескопический трос, соединённый со стабилизирующим устройством,
- измерители и генераторную петлю, закреплённые на телескопическом тросе,
- генератор, установленный на БВС и выполненный с возможностью питания генераторной петли,
при этом стабилизирующее устройство выполнено с возможностью компенсирования отклонения телескопического троса в вертикальной плоскости по направлению движения БВС.
Таким образом, стабилизирующее устройство позволяет компенсировать отклонение телескопического троса в вертикальной плоскости по направлению движения БВС, то есть исключить дополнительные помехи, вызванные воздействием отклонения (крена) БВС на измерительную систему, что приводит к повышению точности и качества получаемой геологической информации. Исключение данных помех также позволяет проводить более качественную интерпретацию геологической информации. Кроме того, за счет использования БВС достигается минимальная высота полета, что также влияет на точность (достоверность) и качество получаемой геологической информации. Чем ниже высота полета, тем точнее качество получаемой информации, соответственно, чем выше высота, тем хуже качество получаемой информации за счет того, что полезный сигнал становится слабее по увеличению высоты, то есть чем слабее полезный сигнал, тем больше шумов. За счет использования телескопического троса исключается искажение сигнала, так как обеспечивается постоянное расстояние между генераторной петлей и измерителями, соответственно, обеспечивается равномерное качество покрытия сигнала по всей площади исследования. Применение БВС также позволяет осуществлять полет на минимальной скорости, что позволяет получить более детальную информацию об исследуемом участке. То есть, чем выше скорость полета, тем больше расстояние между точками наблюдения, тем менее детальность получаемого результата об участке исследования, а чем ниже скорость полета БВС, тем меньше расстояние между точками наблюдения, и соответственно, выше детальность получаемого информации об участке/объекте исследования.
Также технический результат достигается за счет того, что измерительная система для проведения геологоразведочных работ включает:
- стабилизирующее устройство, выполненное с возможностью установки на беспилотном воздушном средстве (БВС),
- телескопический трос, соединённый со стабилизирующим устройством,
- измерители и генераторную петлю, закреплённые на телескопическом тросе,
- генератор, выполненный с возможностью установки на БВС и питания генераторной петли,
при этом стабилизирующее устройство выполнено с возможностью компенсирования отклонения телескопического троса в вертикальной плоскости по направлению движения БВС.
Измерительная система может использоваться для проведения электроразведки.
При реализации устройства и измерительной системы стабилизирующее устройство дополнительно может включать блок управления и стабилизирующую платформу, которые соединены друг с другом, при этом блок управления выполнен с возможностью подачи сигнала на стабилизирующую платформу для компенсирования отклонения телескопического троса. При этом, стабилизирующая платформа дополнительно может включать электрический двигатель, прикрепленный к основанию стабилизирующей платформы, который компенсирует телескопический трос.
При реализации устройства и измерительной системы измерители могут закреплять на противоположном конце телескопического троса от его соединения со стабилизирующей платформой.
При реализации устройства и измерительной системы расстояние между измерителями и генераторной петлей может составлять от 3 до 7 метров. Расстояние могут выбрать на основе проведенных экспериментов, где соотношения сигнал/шум >3. На расстоянии (между измерителями и генераторной петлей) меньше 3 метров высокий уровень шума, что влияет на качество получаемой информации. На расстоянии больше 7 метров полеты считаются небезопасными, так как измерительная система получается массивной, что может привести к нестабильности полета за счет раскачивания системы.
При реализации изобретения, расстояние между БВС и измерителями/генераторной петлей определяют перед выполнением полевых работ, и зависит от типа выбранного БВС, при этом уровень полезного сигнала должен быть выше уровня шумов в 3-4 раза (могут проводить тестовую запись при поочередном удалении измерителей от БВС).
При реализации устройства и измерительной системы дополнительно на противоположном конце телескопического троса от его соединения со стабилизирующей платформой могут закрепить систему акселерометров, которая связана каналом связи со стабилизирующим устройством Канал связи может представлять собой беспроводной канал связи. В качестве беспроводного канала связи могут использовать радиосети.
При реализации устройства и измерительной системы система акселерометров может включать акселерометр, который представляет собой прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением) по направлениям X,Y,Z, при этом показания акселерометра по направлению X,Z будут равны 0 (за счет использования телескопического троса).
При реализации устройства и измерительной системы размер генераторной петли могут определить с учетом глубины исследования и могут рассчитать по формуле Lгп= k * H, где k составляет 0.8-1.2, в зависимости от характеристики геологического разреза, H - глубина исследования. Такой размер генераторной петли позволит получить информацию именно о предполагаемом объекте исследования и не исследовать участки глубже, чем необходимая глубина исследования.
При реализации устройства и измерительной системы размер (длина) телескопического троса может составлять от 3 до 15 метров. Такой диапазон размера телескопического троса является безопасным для проведения геологоразведочных работ. При размерах меньше 3 метров присутствует высокий уровень шума (между измерителем, генераторной петлей и вертолетом), что влияет на качество получаемой информации. При размерах телескопического троса больше 15 метров полеты считаются небезопасными, так как измерительная система получается массивной, что может привести к нестабильности полета за счет раскачивания системы.
Питание генераторной петли генератором может осуществляться с использованием электрического кабеля или провода.
Технический результат достигается также за счет того, что способ проведения геологоразведочных работ, включающий проведение малоглубинной электроразведки, которая включает осуществление съемки участка исследования с помощью устройства для проведения геологоразведочных работ, при этом при осуществлении съемки выполняют следующие этапы:
- движение БВС над участком исследования,
- замер отклонения телескопического троса от вертикальной плоскости по направлению движения БВС,
- компенсирование отклонения телескопического троса в исходное вертикальное положение.
Таким образом, при проведении малоглубинной электроразведки с использованием БВС, достигается минимальная высота полета, что напрямую влияет на точность (достоверность) и качество получаемой геологической информации. Чем ниже высота полета, тем точнее качество получаемой информации, то есть за счет того, что полезный сигнал не слабеет (он ослабевает с увеличением высоты) и чем сильнее полезный сигнал (чем ниже высота, тем сигнал сильнее), тем меньше шумов. За счет использования измерительной системы, а именно телескопического троса, входящего в ее состав, исключается искажение сигнала обеспечивается равномерное качество покрытия сигнала по всей площади исследования, что позволяет исключить искажение сигнала, так как обеспечивается постоянное расстояние между генераторной петлей и измерителями, соответственно, обеспечивается равномерное качество покрытия сигнала по всей площади исследования. Постоянное расстояние между генераторной петлей и измерителями обеспечивается тем, что телескопический трос не отклоняется во время полета в сторону, противоположную полету, так как телескопический трос имеет жесткую конструкцию и соединен со стабилизирующем устройством. Расположение генераторной петли и измерителей на БВС с использованием стабилизирующей платформы и на телескопическим тросе позволяет снизить помехи, вызываемые креном БВС для решения поставленных задач и получить наилучшее соотношение полезного сигнала к шумовой составляющей. Использование БВС с подобной измерительной системой позволяет кратно повысить производительность работ - снижение времени на проведение геологоразведочных работ, а также обеспечение возможности проведения работ в условиях сложного рельефа. Также применение БВС позволяет осуществлять полет на минимальной скорости, что позволяет получить более детальную информацию об исследуемом участке. То есть, чем выше скорость полета, тем больше расстояние между точками наблюдения, тем менее детальность получаемого результата об участке исследования, а чем ниже скорость полета БВС, тем меньше расстояние между точками наблюдения, и соответственно, выше детальность получаемого информации об участке/объекте исследования.
При реализации способа могут предварительно перед осуществлением съемки выполнять вертикальный взлет БВС на высоту движения (полета) Нп. Высоту полета Нп могут определить по формуле: Hп=Hб+l, где Hб- безопасная высота полета от рельефа, l - длина телескопического троса.
При реализации способа могут предварительно перед осуществлением съемки приводить телескопический трос в вертикальное положение. Приведение телескопического троса в вертикальное положение могут осуществлять на расстоянии более 50 метров от начала осуществления съемки, а именно от начала рядовых маршрутов. При меньшем расстоянии от маршрута, а именно от рядовых маршрутов, могут быть зафиксированы помехи, что повлияет на качество проведения съемки. Под приведением телескопического троса в вертикальное положение понимают его раскрытие на всю длину l телескопического троса.
При реализации способа съемку могут осуществлять по заранее заданному маршруту по участку исследования.
При реализации способа заранее заданный маршрут может включать рядовые маршруты, которые перпендикулярны направлению простирания целевого поискового объекта. Параметры рядовых маршрутов могут определить исходя из поставленных задач, так, длина рядового маршрута соответствует размеру стороны участка исследования, перпендикулярной к поисковому объекту (Lr). Количество рядовых маршрутов могут определить исходя из масштаба съемки и размера стороны площади участка исследований, параллельной к поисковому объекту (Kr). Расстояние между рядовыми маршрутами (dX) при масштабе съемки от 1:1 000 до 1:25 000 может соответствовать значениям в диапазоне от 10 метров до 250 метров. То есть, соответствующему масштабу соответствует свой шаг (расстояние) между рядовыми маршрутами съемки, т.е.:
при масштабе съемки 1:1000, dX соответствует 10 метрам,
при масштабе съемки 1:5000, dX соответствует 50 метрам,
при масштабе съемки 1:10000, dX соответствует 100 метрам,
при масштабе съемки 1:15000, dX соответствует 150 метрам,
при масштабе съемки 1:20000, dX соответствует 200 метрам,
при масштабе съемки 1:25000, dX соответствует 250 метрам
При реализации способа заранее заданный маршрут может включать опорные маршруты, которые параллельны простиранию целевого поискового объекта (перпендикулярны рядовым маршрутам). Расстояние между опорными маршрутами (dY) могут определить в 5 раз больше, чем расстояние между рядовыми маршрутами (dX), то есть dY=5*dX. Опорные маршруты перпендикулярны рядовым маршрутам. Длину опорных маршрутов (Lo) могут определить равной размеру стороны площади участка исследований в перпендикулярном направлении к рядовым маршрутам (Kr). Расстояние между опорными профилями (dY) при потребности плотного покрытия территории могут определить в 2 раза больше, чем расстояние между рядовыми маршрутами (dX): dY=2*dX.
При реализации способа заранее заданный маршрут может включать контрольные маршруты, которые определяют вдоль (по направлению и в обратном направлении) относительно генерального азимута на одном из рядовых маршрутов Длина контрольного маршрута (Lk) может быть равна десяти расстояниям между рядовыми маршрутами (dX): Lk=10*dX.
Съемку по контрольным маршрутам могут осуществлять до выполнения съемок по рядовым и опорным маршрутам, а также после проведения съемок по рядовым и опорным маршрутам.
Количество контрольных маршрутов могут определить не менее 5% от общего числа погонных километров съемки (Vk): Vk=0.05*Lr*Nr, где Lr - сторона, являющейся перпендикулярной к поисковому объекту, Nr - количество рядовых маршрутов.
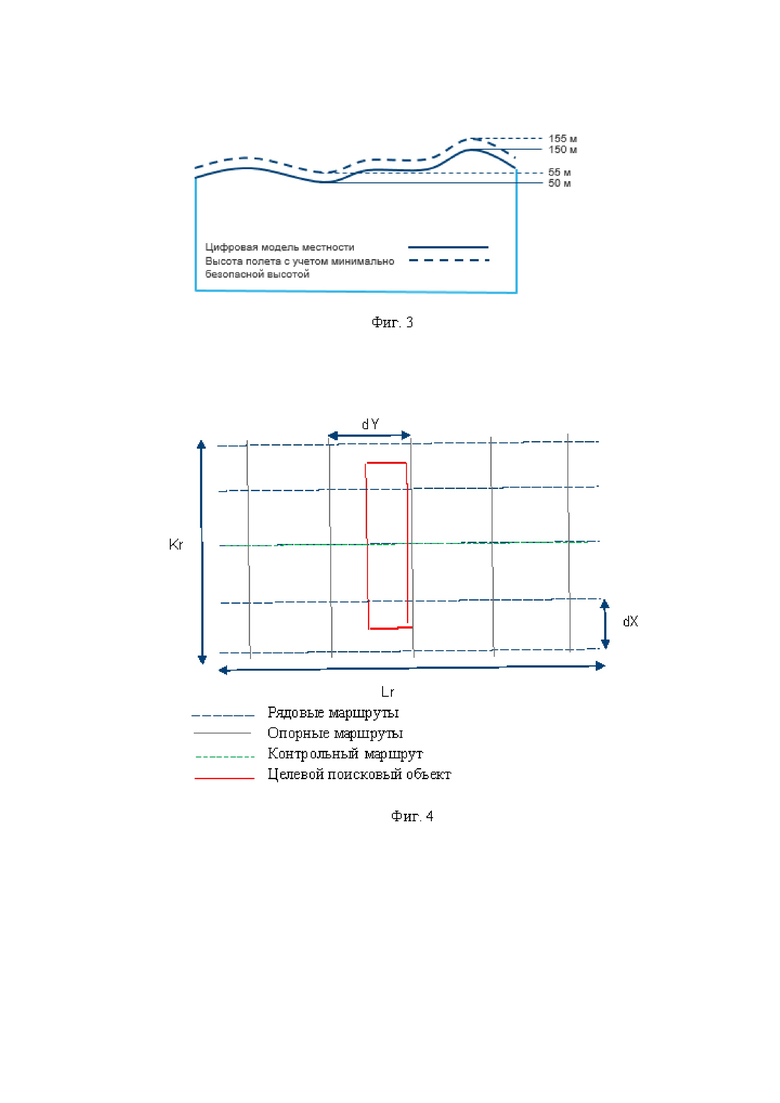
При реализации способа могут предварительно перед осуществлением съемки получить цифровую модель рельефа, на основе которой уточняют высоту движения БВС. Цифровую модель рельефа могут получать путем проведения аэрофотосъёмки. Цифровую модель рельефа могут получать путем проведения воздушно-лазерного сканирования. То есть, цифровая модель может быть получена путем проведения аэрофотосъёмки и/или воздушно-лазерного сканирования. При этом, воздушно-лазерное сканирование и аэрофотосъёмка могут осуществляться также с использованием БВС.
При реализации способа могут предварительно перед осуществлением съемки получать карты магнитного и/или гравитационного полей, на основе которых уточняют участок исследования (ее площадь).
При реализации способа замер отклонения телескопического троса от вертикальной плоскости по направлению движения БВС могут осуществлять с помощью системы акселерометров. При этом, замер отклонения телескопического троса от вертикальной плоскости по направлению движения БВС может передаваться в блок управления.
При реализации способа компенсирование отклонения телескопического троса в исходное вертикальное положение может осуществляться с помощью двигателя стабилизирующей платформы измерительной системы. При этом, компенсирование отклонения телескопического троса в исходное вертикальное положение дополнительно осуществляется с помощью передачи сигнала от блока управления на двигатель стабилизирующей платформы. В блоке управления перед передачей сигнала от блока управления на двигатель стабилизирующей платформы могут определить угол отклонения телескопического троса.
При реализации способа скорость движения БВС может составлять от 0 (режим зависания) до 32 м/с. Использование больших скоростей, по результатам выполненных экспериментов, влечет за собой увеличение шумовой составляющей, что негативно сказывается на качестве данных. Выбор скорости выполнения полетов влияет на итоговое качество полевой обработки данных, чем меньше скорость выполнения полетов, тем выше качество получаемой геологической информации. Итоговый выбор скорости должен исходить из требуемой производительности работ и масштаба съемки, но не более 32 м/с.
Изобретение поясняется следующими фигурами.
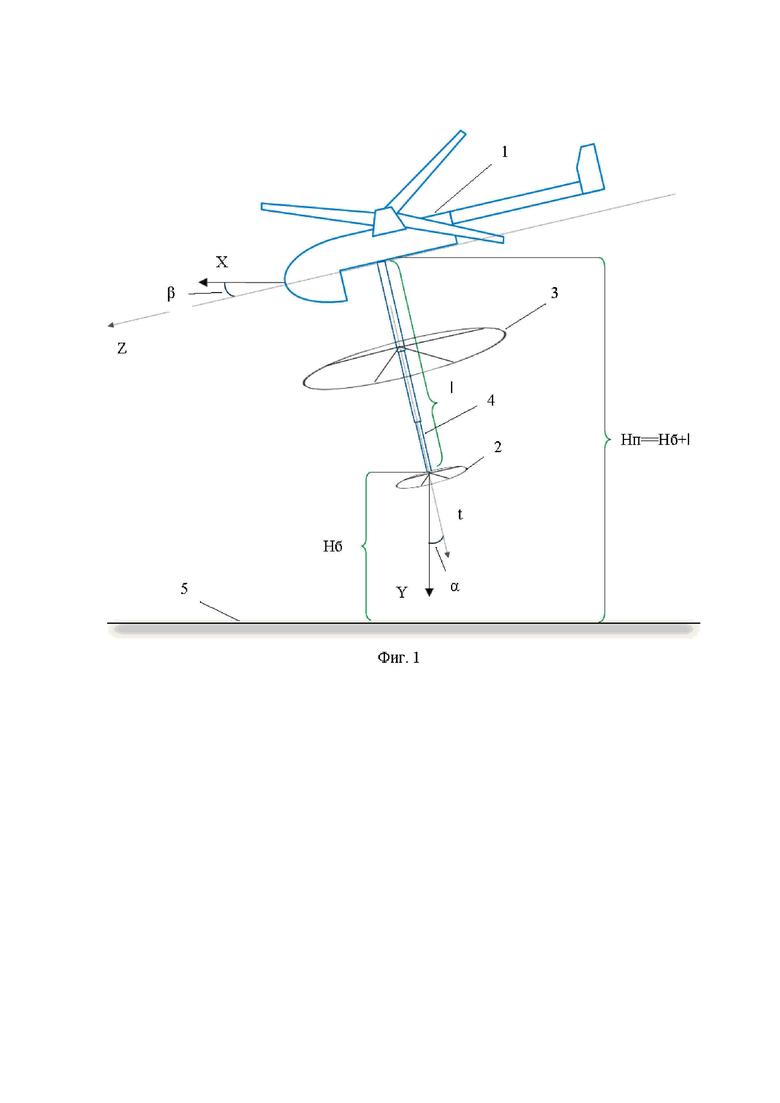
Фиг. 1 - схема устройства для проведения геологоразведочных работ без стабилизирующего устройства.
Фиг. 2 - схема устройства для проведения геологоразведочных работ с использованием стабилизирующего устройства.
Фиг. 3 - цифровая модель рельефа.
Фиг. 4 - определение параметров съемки.
На фигурах приняты следующие обозначения:
1 - БВС,
2 - измерители,
3 - генераторная петля,
4 - телескопические трос,
5 - поверхность (рельеф) участка исследования,
6 - стабилизирующее устройство,
7 - измерительная система,
Х - направление полета БВС, горизонтальная ось,
Y -направление, перпендикулярное поверхности участка исследования в вертикальной области,
Z - ось БВС,
β - угол крена борта БВС,
α - угол отклонения измерительной системы от направления Y,
t - ось телескопического троса без использования стабилизирующего устройства,
l - длина телескопического троса,
l1 - расстояние между измерителями и генераторной петлей,
Нп - высота движения (полета) БВС,
Hб - безопасная высота полета от рельефа.
Изобретение реализуют следующим образом.
Устройство (фиг. 2) для проведения геологоразведочных работ включает БВС (1) и измерительную систему (7). Измерительная система (7) включает: стабилизирующее устройство (6), установленное на БВС (1); телескопический трос (4), соединенный со стабилизирующий устройством (6); измерители (2) и генераторную петлю (3), закреплённые на телескопическом тросе (4), генератор (на фиг. не показан), установленный на БВС (1); выполненный с возможностью питания генераторной петли (3). При этом, стабилизирующее устройство (6) выполнено с возможностью компенсирования отклонения телескопического троса (4) в вертикальной плоскости по направлению движения (Х) БВС (1).
Стабилизирующее устройство (6) может дополнительно включать блок управления и стабилизирующую платформу (на фиг. не показаны), которые соединены друг с другом, при этом блок управления подает сигнал на стабилизирующую платформу для компенсирования телескопического троса. Стабилизирующая платформа может дополнительно включать электрический двигатель (на фиг. не показан), прикрепленный к основанию стабилизирующей платформы, который позволяет компенсировать отклонения телескопического троса. В качестве стабилизирующего устройства может использоваться любое стабилизирующее устройство (гиростабилизированная платформа), которая содержит, например, гироскопы и обеспечивает компенсирование устройства и прикрепленного к ней телескопического троса в исходное положение. То есть, стабилизирующее устройство (6), а именно стабилизирующая платформа с телескопическим тросом ориентирована и стабилизирована в пространстве (исходное положение устройства задается относительно стартовой системы координат - перед движением БВС над участком исследования). Во время движения БВС возможно отклонение телескопического троса. Компенсирование телескопического троса (4) с помощью стабилизирующей платформы производится по сигналам от системы акселерометров. Сигналы от системы акселерометров попадают в блок управления стабилизирующего устройства (6), который определяет необходимость компенсирования телескопического троса (4) в исходное положение через гироскопы, а непосредственно через электрический двигатель.
Измерители (2) могут закрепить на телескопическом тросе (4) на противоположном конце телескопического троса от его соединения со стабилизирующим устройством. Расстояние l1 между измерителями (2) и генераторной петлей (3) могут определить равным от 3 до 7 метров. То есть, сначала на телескопическом тросе (4) закрепляют генераторную петлю (3), затем на конце телескопического троса закрепляют измерители (2) (фиг. 2).
Дополнительно на противоположном конце телескопического троса (4) от его соединения со стабилизирующим устройством закрепляют систему акселерометров (на фиг. не показана), которая связана каналом связи (на фиг. не показан) со стабилизирующим устройством (6). Система акселерометров может быть закреплена вместе с измерителями. При этом, канал связи может быть беспроводным, например, радиосети. Система акселерометров включает акселерометр, который представляет собой прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением). по направлениям X. Y, Z, при этом показания акселерометра по направлению X,Z будут равны 0 (за счет использования телескопического троса (4)).
Размер (длина) генераторной петли могут определить с учетом глубины исследования и могут рассчитать по формуле Lгп= k * H, где k составляет 0.8-1.2, в зависимости от характеристики геологического разреза , H -глубина исследования.
При реализации способа проведения геологоразведочных работ, включающего проведение малоглубинной электроразведки, которая включает осуществление съемки участка исследования с помощью устройства для проведения геологоразведочных работы, при этом выполняют следующие этапы:
- движение БВС над участком исследования,
- замер отклонения (угол α на фиг. 1) телескопического троса (4) от вертикальной плоскости (Y) по направлению движения БВС (1),
- компенсирование отклонения телескопического троса (4) от вертикальной плоскости по направлению движения БВС (1).
Ниже описан более подробный пример возможной реализации изобретения.
Пример для выполнения геологоразведочных работ на участке исследования для поиска и разведки месторождений полезных ископаемых площадью 2000 км2 с использованием беспилотных воздушных средств. Масштаб съемки выбран 1:25 000. Предполагаемая глубина залегания H объекта 20 метров, установленная по априорным данным (геологическая карта).
Дополнительно могут предварительно определить высоту и маршрут осуществления съемки (полета). Ниже описан вариант получения длины и высоты полета. Для поиска месторождений полезных ископаемых и оконтуривания детального участка для подсчета объёмов используются такие методы, такие как: аэрофотосъемка (АФС), воздушно-лазерное сканирование (ВЛС) для получения детальной цифровой модели рельефа (местности, ЦМР). ВЛС могут и не проводить, в зависимости от сложности рельефа, в простых условиях достаточно проведение АФС. Предварительно получили цифровую модель рельефа участка (фиг.3), выявлен перепад высот на участке исследования, который составляет от 50 до 150 м, минимальная высота съемки от рельефа составляет 5 м., то есть дальнейшие работы могут осуществлять на высоте от 55 до 155 метрах. То есть, Нб варьируется от 55 до 155 метров в зависимости от рельефа исследуемого участка. Следующим этапом проводят работы по магниторазведке и/или гравиразведке (получают карты магнитного и/или гравитационного полей), используя ЦМР для обеспечения качества получаемых данных и безопасности полетов. Магниторазведка осуществляется с использованием БВС любыми известными из уровня техники способами (например, магниторазведку осуществляют по способу, описанному в патенте РФ № 2739970 от 30.12.2020 г.) Для гравиразведки с использованием БВС выполняется съемка по рядовым, опорным профилям, на минимально возможной безопасной высоте относительно рельефа. Скорость выполнения съемки зависит от масштаба исследований. Гравиразведка осуществляется также с использованием БВС любыми известными из уровня техники способами. Результаты интерпретации данных магниторазведки и гравиразведки позволяют сузить область поиска, для примера, с 2000 км2 до 30 км2 - 5х6 км. (Lr=6 км=6000 м., Kr=5 км=5000 м.), длинная сторона участка (Lr) располагается перпендикулярно простиранию целевого поискового объекта.
Таким образом, на основе полученных карт магнитного и/или гравитационного полей уточняют участок исследования для проведения дальнейшей съемки, размеры которого 5000х6000 метров. На основании ЦМР уточняют высоту движения (Hп), которая будет равняться сумме (Hб) и длины (l) телескопического троса (4). Безопасная высота полета(Hб) варьируется от 55 до 155 метров. Длина телескопического троса (l) составляет 10 м, которая состоит из расстояния между генераторной петлей и измерительной петлей, примем ее за 7 м, и расстоянием между БВС и генераторной петлей 3 м. Таким образом высота полета (Нп) будет равна от 65 до 155 м.
Для повышения производительности работ и снижения времени работ, была выбрана максимальная скорость полета БВС - 32 м/с.
Также предварительно сформировали маршрут осуществления съемки (фиг. 4). При выбранном масштабе съемки 1:25000 расстояние (dX) между рядовыми маршрутами соответствует 250 м. При этом рядовые маршруты определяются вдоль направления стороны участка (Lr), которое перпендикулярно направлению целевого поискового объекта и, соответственно, длина рядового маршрута равна длиной стороне участка исследования (Lr) (стороне, являющейся перпендикулярной к поисковому объекту), то есть равна 6000 м. Таким образом, количество рядовых маршрутов (Nr) можно определить с использованием размеров участка исследования и расстоянием между рядовыми маршрутами. То есть, количество рядовых маршрутов Nr = Kr/dX =5000/250=20. После определения рядовых маршрутов определяют опорные маршруты, которые расположены перпендикулярно рядовым маршрутам (то есть длина опорных маршрутов будет равна Kr=5000м.), а расстояние между ними определяют как dY=5*dX=5*250=1250 м. Количество опорных маршрутов (Mr) можно определить с использованием размеров участка исследования и расстоянием между опорными маршрутами. То есть, Mr=Lr/dY=6000/1250=4.8=5. Контрольный маршрут проводят на любом из рядовых маршрутов в прямом и обратном направлении. Длину контрольного маршрута определяют Lk=10*dX=10*250=2500 м, соответственно, округляется в большую сторону до 3000 м, для данного примера с длиной рядового маршрута 6000 м, необходимо выполнить съемку в прямом направлении по рядовому маршруту в одном направлении. Проверяем условие достаточности объёмов контрольных измерений, не менее 5% от общего числа погонных километров съемки (Vk), Vk=0.05*Lr*Nr=0,05*6000*20=6000м., соответственно, при невыполнении условия, добавляем контрольных маршрутов в недостающем объеме на соседних рядовых маршрутах. То есть, необходимо выполнить съемку еще на одном контрольном маршруте. Съемку по контрольным маршрутам осуществляют до выполнения съемок по рядовым и опорным маршрутам, а также после.
Таким образом, подготовлен маршрут осуществления съемки (см. фиг. 4).
Предварительно осуществляют вертикальный взлет БВС (1) с измерительной системой (7) на соответствующую высоту (Hб).
После вертикального взлета на высоту Нб, предварительно перед осуществлением съемки приводят телескопический трос в вертикальное положение. То есть, осуществляют приведение выдвижных секций телескопического троса (4) в рабочее вертикальное состояние с максимально возможной длиной (l) троса. Например, телескопический трос (4) состоит из секций, две из которых являются выдвижными. Таким образом, на высоте полета перед осуществлением съемки приводя телескопический трос (4) в раскрытое вертикальное рабочее положение, то есть трос удлиняются на длину двух выдвижных секций, и получается вертикальный телескопический трос длиной l. Приведение телескопического троса (4) в рабочее состояние осуществляют более, чем на 50-ти метров расстоянии от начала осуществления съемки, а именно от начала рядовых маршрутов.
Осуществляют съемку с использованием БВС (1) по исследуемому участку (5) с измерительной системой (7).
Осуществляют замер отклонения телескопического троса (4) от вертикальной плоскости по направлению движения БВС (1). То есть, замеряют угол отклонения измерительной системы (телескопического троса) от вертикального направления. Замеры осуществляют непрерывно на протяжении всего полета. Замеры могут осуществить с использованием системы акселерометров (на фиг не показана), которая также закреплена на телескопический трос (4), а именно на конец телескопического троса вместе с измерителями (3).
То есть, система акселерометров подает сигнал о замеренных отклонениях на стабилизирующее устройство (6), а именно в блок управления (на фиг. не показан). Сигнал был передан по беспроводному каналу связи. Блок управления получает сигнал, на основании которого рассчитывает угол отклонения.
Например, были получены следующие замеры отклонения телескопического троса: угол α - 15°.
Таким образом, осуществили замеры отклонения телескопического троса (4).
Далее компенсируют отклонение телескопического троса (4) в вертикальное положение. То есть, стабилизирующее устройство (6), а именно блок управления подает сигнал на стабилизирующую платформу с гироскопами, которая содержит электрический двигатель для компенсации телескопического троса (4) в исходное вертикальное положение. При этом, возможна погрешность в отклонении на 5%. Таким образом, телескопический трос (4), соответственно сама измерительная система (7) направлена по направлению Y.
И во время осуществления съемки непрерывно замеряют отклонения телескопического троса (4) и компенсируют, при его отклонении.
При реализации изобретения расстояние между измерителями (2) и генераторной петлей (3) было выбрано 7 метров, на основании тестовых замеров соотношения сигнал/шум. Генераторная петля была размещена на расстоянии 3 м. от БВС, что обеспечивает безопасность полетов и оптимальные показатели соотношения сигнал/шум.
В результате проведенных геологоразведочных работ на участке исследования найден карьер строительных материалов в минимальные сроки с минимальными затратами.
Таким образом, с помощью применения заявленного изобретения достигается повышение качества геологической информации об объекте исследования (участке) за счет достижения минимальной высоты полета, обеспечения равномерного качества покрытия сигнала по всей площади участка за счет использования телескопического троса, также за счет возможности невысокой скорости полета. Минимальная скорость полета и возможность проведения работ в условиях сложно рельефа достигается за счет использования БВС. Компенсирование отклонения телескопического троса в вертикальной плоскости по направлению движения БВС, то есть исключение дополнительных помех, вызванные воздействием отклонения (крена) БВС на измерительную систему, приводит также к повышения качества и достоверности геологической информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ аэроэлектроразведки с применением легкого беспилотного летательного аппарата | 2020 |
|
RU2736956C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) | 2018 |
|
RU2697474C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| СПОСОБ ОБЪЕМНОЙ РЕКОНСТРУКЦИИ ЭЛЕКТРОФИЗИЧЕСКОЙ МОДЕЛИ ПОДПОВЕРХНОСТНОЙ СРЕДЫ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОЙ ЭЛЕКТРОМАГНИТНОЙ СИСТЕМЫ | 2024 |
|
RU2836589C1 |
| Способ мониторинга в реальном времени безопасности при проведении полевых геологоразведочных работ с использованием беспилотных авиационных систем | 2023 |
|
RU2822718C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СПОСОБ ИМПУЛЬСНОЙ АЭРОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2251718C1 |
| Способ проведения многоуровневой магнитометрической съемки | 2020 |
|
RU2739970C1 |
| СПОСОБ И СИСТЕМА АЭРОЭЛЕКТРОРАЗВЕДКИ | 2016 |
|
RU2649658C2 |

Изобретение относится к области разведки месторождений полезных ископаемых, а также мониторинга территорий и может быть использовано при проведении геологоразведочных работ, в частности для проведения аэроэлектроразведки. Сущность предлагаемого изобретения заключается в следующем. Устройство для проведения геологоразведочных работ с использованием беспилотных воздушных средств, включающее беспилотное воздушное средство (БВС) и измерительную систему, включающую: установленное на БВС стабилизирующее устройство, соединённый со стабилизирующим устройством телескопический трос, закреплённые на телескопическом тросе измерители и генераторную петлю, установленный на БВС генератор питания генераторной петли. При этом стабилизирующее устройство выполнено с возможностью компенсирования отклонения телескопического троса в вертикальной плоскости по направлению движения БВС. Способ проведения геологоразведочных работ с использованием БВС включает следующие этапы: замер отклонения телескопического троса от вертикальной плоскости по направлению движения БВС, компенсацию отклонения телескопического троса в исходное вертикальное положение. Техническим результатом заявленного изобретения является повышение точности получаемой геологической информации об участке исследования, обеспечение возможности проведения работ в условиях сложного рельефа, а также снижение времени проведения геологоразведочных работ. 3 н. и 25 з.п. ф-лы, 4 ил.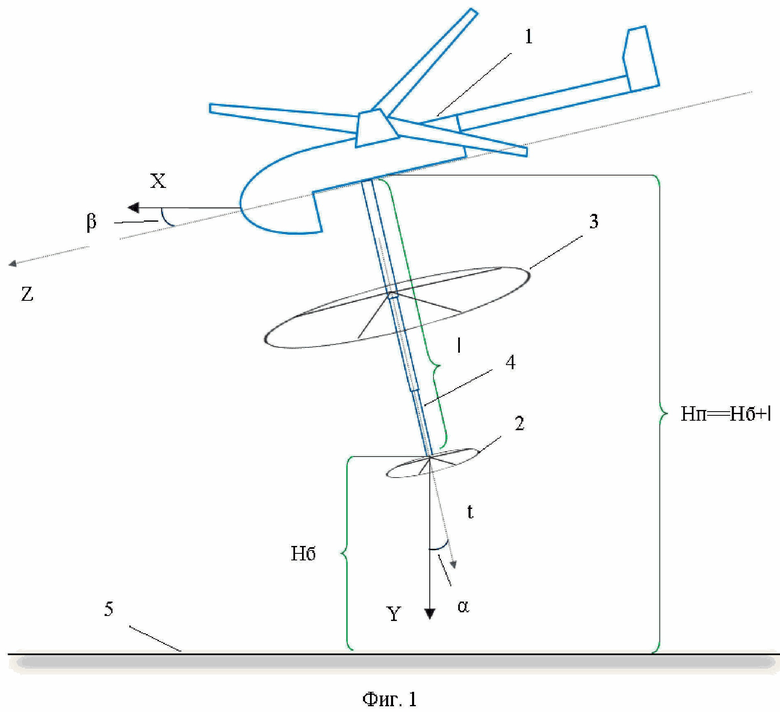
1. Измерительная система для проведения геологоразведочных работ включающая стабилизирующее устройство, выполненное с возможностью установки на беспилотном воздушном средстве (БВС), телескопический трос, соединённый со стабилизирующим устройством, измерители и генераторную петлю, закреплённые на телескопическом тросе, генератор, выполненный с возможностью установки на БВС и питания генераторной петли, при этом стабилизирующее устройство выполнено с возможностью компенсирования отклонения телескопического троса в вертикальной плоскости по направлению движения БВС, при этом стабилизирующее устройство включает блок управления и стабилизирующую платформу, соединенные друг с другом, при этом блок управления выполнен с возможностью подачи сигнала на стабилизирующую платформу для компенсирования отклонения телескопического троса, при этом стабилизирующая платформа включает электрический двигатель, прикрепленный к основанию стабилизирующей платформы, который компенсирует отклонение телескопического троса, на противоположном конце которого от его соединения со стабилизирующей платформой закрепляют систему акселерометров, связанную каналом связи со стабилизирующим устройством.
2. Измерительная система по п.1, в которой измерители закрепляют на противоположном конце телескопического троса от его соединения со стабилизирующим устройством.
3. Измерительная система по п.1, в которой расстояние между измерителями и генераторной петлей составляет от 3 до 7 метров.
4. Измерительная система по п.1, в которой канал связи представляет собой беспроводной канал связи.
5. Измерительная система по п.4, в которой в качестве беспроводного канала связи используют радиосети.
6. Измерительная система по п.1, в которой размер генераторной петли определяют по формуле Lгп= k * H, где k составляет 0.8-1.2, H – глубина исследования.
7. Измерительная система по п.1, в которой размер телескопического троса составляет от 3 до 15 метров.
8. Измерительная система по п. 1, в которой система акселерометров включает акселерометр, который представляет собой прибор, измеряющий проекцию кажущегося ускорения по направлениям X, Y, Z.
9. Устройство для проведения геологоразведочных работ, включающее беспилотное воздушное средство и измерительную систему по любому из пп. 1-8.
10. Способ проведения геологоразведочных работ, включающий проведение малоглубинной электроразведки, которая включает осуществление съемки участка исследования с помощью устройства для проведения геологоразведочных работ по п.9, при этом выполняют следующие этапы: движение БВС над участком исследования; замер отклонения телескопического троса от вертикальной плоскости по направлению движения БВС; компенсирование отклонения телескопического троса в исходное вертикальное положение; при этом замер отклонения телескопического троса от вертикальной плоскости по направлению движения БВС осуществляют с помощью системы акселерометров и передают в блок управления, который определяет угол отклонения телескопического троса, при этом компенсирование отклонения телескопического троса в исходное вертикальное положение осуществляется с помощью двигателя стабилизирующей платформы измерительной системы, на который сигнал передаётся от блока управления.
11. Способ по п. 10, в котором предварительно перед осуществлением съемки выполняют вертикальный взлет БВС на высоту движения Нп.
12. Способ по п. 10, в котором высоту полета Нп определяет по формуле: Hп=Hб+l, где Hб - безопасная высота полета от рельефа, l – длина телескопического троса.
13. Способ по п. 10, в котором предварительно перед осуществлением съемки приводят телескопический трос в вертикальное положение.
14. Способ по п. 13, в котором приведение телескопического троса в рабочее положение осуществляют на расстоянии более 50 метров от начала осуществления съемки.
15. Способ по п. 10, в котором съемку осуществляют по заранее заданному маршруту по участку исследования.
16. Способ по п. 15, в котором заранее заданный маршрут включает рядовые маршруты, которые перпендикулярны направлению простирания целевого поискового объекта.
17. Способ по п. 16, в котором расстояние между рядовыми маршрутами (dX) при масштабе съемки от 1:1 000 до 1:25 000, соответствует значениям в диапазоне от 10 метров до 250 метров.
18. Способ по п. 15, в котором заранее заданный маршрут включает опорные маршруты, которые параллельны направлению простирания целевого поискового объекта.
19. Способ по п. 18, в котором расстояние между опорными маршрутами (dY) в 5 раз больше, чем расстояние между рядовыми маршрутами (dX).
20. Способ по п. 15, в котором заранее заданный маршрут включает контрольные маршруты, которые определяют вдоль относительно генерального азимута на одном из рядовых маршрутов.
21. Способ по п. 20, в котором длина контрольного маршрута (Lk) равна десяти расстояниям между рядовыми маршрутами (dX).
22. Способ по п. 21, в котором количество контрольных маршрутов не менее 5% от общего числа погонных километров съемки (Vk): Vk=0.05*Lr*Nr, где Lr - сторона, являющейся перпендикулярной к поисковому объекту, Nr - количество рядовых маршрутов.
23. Способ по п. 18, в котором расстояние между опорными маршрутами при потребности плотного покрытия территории в 2 раза больше, чем расстояние между рядовыми маршрутами (dX): dY=2*dX.
24. Способ по п. 10, в котором перед осуществлением съемки получают цифровую модель рельефа, на основе которой уточняют высоту движения БВС.
25. Способ по п. 24, в котором цифровую модель рельефа получают путем проведения аэрофотосъёмки.
26. Способ по п. 24, в котором цифровую модель рельефа получают путем проведения воздушно-лазерного сканирования.
27. Способ по п. 10, в котором перед осуществлением съемки получают карты магнитного и/или гравитационного полей, на основе которых утоняют участок исследования.
28. Способ по п. 10, в котором скорость движения БВС составляет от 0 в режиме зависания до 32 м/с.
| Способ аэроэлектроразведки и устройство для его осуществления | 2017 |
|
RU2652655C1 |
| СПОСОБ ИНДУКТИВНОЙ АЭРОЭЛЕКТРОРАЗВЕДКИ НА ШЕЛЬФЕ ПО ВАРИАЦИЯМ ГЕОМАГНИТНОГО ПОЛЯ | 2011 |
|
RU2497156C2 |
| УСТРОЙСТВО ДЛЯ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ (ВАРИАНТЫ) | 2002 |
|
RU2201603C1 |
| US 20190033441 A1, 31.01.2019 | |||
| CN 111634420 A, 08.09.2020 | |||
| WO 1999032905 A1, 01.07.1999. | |||
