Предлагаемое изобретение относится к моноимпульсным когерентным радиолокационным системам (РЛС), работающим на подвижных носителях, предназначенных для обнаружения сигналов от надводных целей и выдачи их координат в систему управления в условиях естественных, организованных активных и пассивных помех.
При селекции целей на фоне пассивных помех используется различия в доплеровских частотах сигналов от целей и источников помех, являющиеся следствием различия их радиальных скоростей [1, с.147]. Информационным признаком, используемым для селекции сигнала от цели, является доплеровская частота fД принимаемых сигналов - решение о наличии сигнала цели принимается, если |fД|≫0| и выходит за полосу доплеровского спектра помехи.
Недостатком этого способа является ошибочная селекция в тех случаях, когда селектируемый объект (истинная цель) неподвижен или движется в направлении, перпендикулярном направлению распространения излучения (fД≈0), а также когда источник помехи имеет доплеровский спектр сигнала (центральную частоту и ширину доплеровского спектра), близкий к доплеровскому спектру цели.
Известен другой способ селекции сигнала из помех, вызванных отражениями от земли, рассмотренный в описании к патенту [2], который основан на доплеровской фильтрации сигналов, принимаемых бортовой РЛС на две разнесенные вдоль фюзеляжа антенны. Выходы доплеровских фильтров сигналов, принятых на разнесенные антенны, поступают на фильтр, где определяется мощность каждой частотной компоненты Pi, разность фаз одноименных частотных компонент спектров сигналов, принятых разнесенными антеннами Δφi, и отклонения измеренных разностей фаз от расчетных значений для отражений от Земли
где:
Δi - отклонение измеренной разности фаз Δφi от расчетной для fДi
d - база антенной системы,
fДi - доплеровский сдвиг i-й частотной компоненты сигнала,
V - скорость летательного аппарата (ЛА) относительно Земли при измерении,
Δφi - разность фаз одноименных i-х частотных компонент спектра, принятых через разнесенные на расстояние d антенны.
Выход доплеровского фильтра поступает на пороговое устройство, в котором сигнал подвижной цели селектируют от сигнала отражений от Земли (берега, моря) по двум критериям. Первый - превышение мощностью сигнала Рi заданного порогового соотношения сигнал/шум. Второй - превышение отклонения Δi порога nσφ (σφ - расчетное СКО Δi для отражений от берега (моря), n - весовой коэффициент порога). Для отражений от Земли Δi не превышает порога.
Недостатком способа является то, что он различает только подвижные и неподвижные цели, соответственно не различает помеху в виде облака дипольных отражателей и цель. Кроме того, способ применим при расположении цели в пределах ±20° относительно нормали к базе антенной системы, при этом база антенной системы должна располагаться вдоль фюзеляжа.
Способ и устройство по описанию патента [3] позволяет импульсно-доплеровской РЛС проводить селекцию цели на фоне пассивных помех, используя два критерия. По первому критерию сигнал во время-частотной области должен превышать первый высокий порог соотношения сигнал/шум. По второму критерию частотно-временной размер цели, определяемый по более низкому порогу обнаружения, должен находиться в пределах 1≤Kf≤Kfпор (Kf - ширина доплеровского спектра сигнала, отнесенная к разрешению РЛС по доплеровской частоте) и 1≤Kr≤Кrпор (Kr - временной размер отраженного сигнала, отнесенный к разрешению РЛС по времени).
При этом в узком частотно-временном скользящем окне из Mf×Mr разрешаемых по частоте и дальности элементам должно находиться не более одной цели.
При одновременном выполнении обоих критериев для анализируемых точек время-частотного скользящего окна размером Mf×Мr делается вывод о наличии сигнала цели. Все сигналы, не удовлетворяющие этому критерию, режектируются.
Данный способ надежно отделяет истинные цели от ложных пассивных отражений от Земли и отражений от облаков дипольных отражателей (ОДО), если частотно-временной размер пассивной помехи с допустимой вероятностью превышает размер полезного сигнала. В ряде случаев это не выполняется. К примеру, если ракурс наблюдения надводного корабля (НК) и удаление его от РЛС таково, что ширина его доплеровского спектра сравнима с шириной спектра облака дипольных отражателей (ОДО) и даже больше. Проиллюстрируем это расчетом ширины спектра разрешаемого элемента НК, находящегося на дальности R=6 км, наблюдаемого под углом β=45° к вектору скорости ЛА. Пусть линейный азимутальный размер разрешаемого по дальности элемента НК равен ΔL=70 м, длина волны излучения РЛСλ=3 см и скорость ЛА V=300 м/сек.
Ширина спектра сигнала, отраженного от разрешаемого элемента НК, для этих условий равна:
что шире ожидаемой ширины спектра ОДО 52 Гц [6, с.272] учетом симметрии гауссовой огибающей спектра относительно центральной частоты [7, с.85-88].
Известен способ сопровождения цели моноимпульсной РЛС в условиях пассивных и активных помех [4], наиболее близкий по технической сущности к предлагаемому и принятый в качестве прототипа. Согласно этому способу в моноимпульсной РЛС в заданном направлении излучается когерентный импульсный сигнал. Принятые отраженные сигналы после суммарно-разностного преобразования переносятся на промежуточную частоту и усиливаются. Усиленные суммарные и разностные сигналы с помощью квадратурно-фазового детектирования переносятся на видеочастоту. Далее, на видеочастоте последовательно осуществляется согласованная и многоканальная доплеровская фильтрация сигналов в заданном диапазоне дальностей. Результаты фильтрации в суммарном канале используются для порогового обнаружения сигналов и последующего определения ширины спектра сигнала на анализируемой дальности. Затем найденная ширина спектра сравнивается с заданным порогом. При превышении ширины спектра заданного порога принимают решение, что сигнал принадлежит ложной цели, а при отсутствии превышения - истинной цели. Кроме того, за счет узкополосной доплеровской фильтрации суммарного и разностного сигнала обеспечивается повышение разрешения РЛС по углу, соответственно соотношения сигнал/фон, и различение цели в полосе доплеровских флюктуации отражений от берега (моря) по превышению сигналом порогового значения сигнал/фон. Обнаруженная цель берется на автосопровождение по доплеровской частоте, дальности и углу. При этом для определения сигнала ошибки по дальности используется разность мощностей сигналов на выходах аналогичных доплеровских фильтров суммарного канала, настроенных на отслеживаемую доплеровскую частоту цели, на разнесенных дальностях. Сигнал ошибки по углу для отслеживаемой по доплеровской частоте и дальности цели определяется путем попарного перемножения результатов узкополосной доплеровской фильтрации одноименных квадратурных составляющих сигналов в суммарном и разностном каналах и суммирования этих произведений.
Недостатком способа [4] является то, что он надежно работает только при условии, что наблюдаемый частотный размер спектра пассивной помехи (отражений от моря, берега, ОДО) превышает максимальный предполагаемый частотный размер НК, что, как показано выше, имеет место не при всех условиях визирования (наблюдаемых угловых размерах цели).
Устройство, реализующее указанный способ, - когерентная моноимпульсная РЛС, описано в [5]. Для излучения используется импульсный (простой или сложный) сигнал. После согласованной фильтрации суммарного и разностного сигналов на видеочастоте производится пороговое обнаружение суммарного сигнала, РЛС переводится в режим автосопровождения по дальности и углу. Сигнал ошибки по углу на сопровождаемой дальности определяется как скалярное произведение квадратурных составляющих сигналов на выходах цифровых согласованных фильтров суммарного и разностного каналов. В режиме слежения за предполагаемым сигналом цели по дальности производится доплеровский спектральный анализ и определение ширины спектра сигнала. Если ширина спектра сигнала на сопровождаемой дальности не превышает расчетную границу, то принимается решение, что анализируемый сигнал принадлежит цели, в ином случае - помехе и исключается из дальнейшего рассмотрения.
Недостатком способа, реализованного в когерентной моноимпульсной РЛС [5], является то, что он надежно классифицирует цель/пассивная помеха только при условии, что наблюдаемая ширина спектра пассивной помехи (отражений от моря, берега, ОДО) превышает максимальный предполагаемый частотный размер НК, что, как показано выше, имеет место не при всех условиях визирования.
Технической задачей предлагаемого изобретения является повышение достоверности классификации цель/пассивная помеха (за исключением помех типа уголковый отражатель) при углах визирования и дальностях, когда расчетная ширина спектра сигнала цели сравнима и даже больше ожидаемой ширины спектра ОДО.
Поставленная цель достигается тем, что в способ, описанный в [4], включающий излучение когерентных радиоимпульсов с постоянной несущей частотой в заданном направлении, прием отраженных сигналов в заданном интервале дальностей, суммарно-разностное преобразование принимаемых сигналов, супергетеродинное преобразование их на промежуточную частоту, усиление суммарного и разностного сигналов на промежуточной частоте, преобразование спектра суммарного и разностного сигналов в область видеочастот посредством квадратурного фазового детектирования при помощи опорных колебаний с формированием квадратурных составляющих каждого сигнала, согласованную фильтрацию видеоимпульсов квадратурных составляющих сигналов, в суммарном и разностном каналах для каждого элемента дальности в заданном временном интервале осуществляют многоканальную доплеровскую фильтрацию комплексной огибающей импульсной последовательности в диапазоне частот Доплера от минус  до плюс фильтрами с полосой δf, число фильтров
до плюс фильтрами с полосой δf, число фильтров  где fп - частота повторения зондирующих импульсов, ширина полосы пропускания доплеровских фильтров δf выбирается как половина ширины спектра межпериодных флюктуации сигналов от ОДО (ΔfОДО), сравнивают мощности спектральных составляющих с первым пороговым уровнем обнаружения, определяют ширину спектра с наиболее мощной спектральной составляющей по заданному уровню из числа составляющих, превысивших порог обнаружения, сравнивают полученное значение ширины спектра со вторым заданным пороговым значением, при превышении ширины спектра второго порогового значения (второй критерий ложной цели) принимают решение о наличии сигнала от ложной цели, который как ложный отбрасывается, и переходят к следующему элементу дальности, а при отсутствии превышения вычисляют скалярное произведение квадратурных сигналов, полученных в результате фильтрации в одноименных доплеровских фильтрах суммарного и разностного каналов путем попарного перемножения одноименных квадратурных составляющих сигналов с суммированием этих произведений введено последовательное вычисление "пеленгов" (γi), "доплеровских углов" (βi) и дисперсии (Dψ) угловой разности между ними (ψi=γi-βi) для всех разрешаемых частотно-временных элементов сцены, не забракованных по первому и второму критерию и находящихся на одинаковых дальностях, "пеленг" (γi) разрешаемого элемента сцены определяется делением (нормировкой) вычисленного для него скалярного произведения на мощность суммарного сигнала для того же разрешаемого элемента сцены и умножением полученного результата на масштабирующий коэффициент, "доплеровский угол" разрешаемого элемента сцены (βi) определяется как произведение углового разноса между соседними доплеровскими направлениями (δβv) на номер доплеровского фильтра (i), в котором на анализируемой дальности обнаружен сигнал, найденная на каждой разрешаемой дальности дисперсия разности углов сравнивается с третьим порогом, при превышении дисперсией расчетного третьего порогового значения (третий критерий ложной цели) - сигнал сцены на этой дальности также отбрасывается, угловой разнос между соседними направлениями (δβv), разрешаемыми по частоте и находящимися в пределах узкой суммарной ДНА, определяется по известной связи доплеровского сдвига частоты отраженного сигнала с параметрами излучения, движения ЛА и условиями визирования по формуле:
где fп - частота повторения зондирующих импульсов, ширина полосы пропускания доплеровских фильтров δf выбирается как половина ширины спектра межпериодных флюктуации сигналов от ОДО (ΔfОДО), сравнивают мощности спектральных составляющих с первым пороговым уровнем обнаружения, определяют ширину спектра с наиболее мощной спектральной составляющей по заданному уровню из числа составляющих, превысивших порог обнаружения, сравнивают полученное значение ширины спектра со вторым заданным пороговым значением, при превышении ширины спектра второго порогового значения (второй критерий ложной цели) принимают решение о наличии сигнала от ложной цели, который как ложный отбрасывается, и переходят к следующему элементу дальности, а при отсутствии превышения вычисляют скалярное произведение квадратурных сигналов, полученных в результате фильтрации в одноименных доплеровских фильтрах суммарного и разностного каналов путем попарного перемножения одноименных квадратурных составляющих сигналов с суммированием этих произведений введено последовательное вычисление "пеленгов" (γi), "доплеровских углов" (βi) и дисперсии (Dψ) угловой разности между ними (ψi=γi-βi) для всех разрешаемых частотно-временных элементов сцены, не забракованных по первому и второму критерию и находящихся на одинаковых дальностях, "пеленг" (γi) разрешаемого элемента сцены определяется делением (нормировкой) вычисленного для него скалярного произведения на мощность суммарного сигнала для того же разрешаемого элемента сцены и умножением полученного результата на масштабирующий коэффициент, "доплеровский угол" разрешаемого элемента сцены (βi) определяется как произведение углового разноса между соседними доплеровскими направлениями (δβv) на номер доплеровского фильтра (i), в котором на анализируемой дальности обнаружен сигнал, найденная на каждой разрешаемой дальности дисперсия разности углов сравнивается с третьим порогом, при превышении дисперсией расчетного третьего порогового значения (третий критерий ложной цели) - сигнал сцены на этой дальности также отбрасывается, угловой разнос между соседними направлениями (δβv), разрешаемыми по частоте и находящимися в пределах узкой суммарной ДНА, определяется по известной связи доплеровского сдвига частоты отраженного сигнала с параметрами излучения, движения ЛА и условиями визирования по формуле:
где:
λ - длина волны излучаемого сигнала,
FП - частота повторения зондирующих импульсов,
β - угол между продольной осью ЛА и равносигнальным направлением (РСН) антенной системы,
α - угол сноса ЛА.
В качестве прототипа устройства, реализующего предлагаемый способ, взята когерентная моноимпульсная РЛС [5].
Цель достигается также и тем, что в устройство моноимпульсной РЛС, содержащее последовательно соединенные антенный переключатель, суммарно-разностный преобразователь и антенну, усилитель мощности, привод антенны, двухканальный приемник, первый выход которого через квадратурно-фазовый детектор суммарного канала соединен с входом видеоусилителя суммарного канала, второй выход двухканального приемника через квадратурно-фазовый детектор разностного канала соединен с входом видеоусилителя разностного канала, цифровые согласованные фильтры суммарного и разностного каналов, блок объединения квадратур, дискриминатор угла, блок первичной обработки и блок вторичной обработки, при этом привод антенны кинематически связан с третьим входом антенны, второй выход суммарно-разностного преобразователя соединен со вторым входом двухканального приемника, третий выход антенного переключателя соединен с первым входом двухканального приемника, синхронизатор через импульсный модулятор соединен со вторым входом усилителя мощности, второй выход возбудителя соединен с третьим входом двухканального приемника, третий выход возбудителя соединен со вторыми входами квадратурных фазовых детекторов суммарного и разностного каналов, второй выход блока вторичной обработки соединен с входом привода антенны, второй выход которого соединен с седьмым входом блока первичной обработки, вход блока объединения квадратур соединен с первым входом дискриминатора угла, выход блока объединения квадратур соединен со вторым входом блока первичной обработки, четвертый выход возбудителя соединен с входом синхронизатора, первый выход блока вторичной обработки соединен с четвертым входом блока первичной обработки, первый выход которого соединен с первым входом блока вторичной обработки, двухканальный приемник содержит последовательно соединенные по двум входам-выходам суммарного и разностного каналов двухканальный усилитель высокой частоты, двухканальный балансный смеситель, третий (гетеродинный) вход которого является третьим гетеродинным входом двухканального приемника, первый и второй выходы усилителя высокой частоты являются входами балансного смесителя, а первый и второй выходы двухканального усилителя промежуточной частоты - выходами суммарного и разностного каналов двухканального приемника соответственно, введены многоканальные доплеровские фильтры суммарного и разностного каналов, фазовращатель, делитель и измеритель скорости и сноса, при этом третий выход возбудителя через фазовращатель соединен с третьими входами квадратурных фазовых детекторов суммарного и разностного каналов, выход видеоусилителя суммарного канала через цифровой согласованный фильтр суммарного канала подключен к первому входу многоканального доплеровского фильтра суммарного канала, выход видеоусилителя разностного канала через цифровой согласованный фильтр разностного канала подключен к первому входу многоканального доплеровского фильтра разностного канала, выход блока объединения квадратур соединен с первым входом делителя, выход которого соединен с пятым входом блока первичной обработки, первый выход возбудителя через усилитель мощности соединен с первым входом антенного переключателя, четвертый выход возбудителя соединен со вторыми входами цифровых согласованных фильтров суммарного и разностного каналов, вторыми входами многоканальных доплеровских фильтров суммарного и разностного каналов и первым входом блока первичной обработки, первый выход синхронизатора дополнительно соединен с входом возбудителя и пятыми входами многоканальных доплеровских фильтров суммарного и разностного каналов, выход многоканального доплеровского фильтра суммарного канала соединен с входом блока объединения квадратур, выход многоканального доплеровского фильтра разностного канала соединен со вторым входом дискриминатора угла, выход которого соединен со вторым входом делителя, второй выход синхронизатора соединен с третьим входом блока первичной обработки; четвертый выход синхронизатора соединен с третьими входами многоканальных доплеровских фильтров суммарного и разностного каналов и шестым входом блока вторичной обработки, третий выход синхронизатора соединен с четвертыми входами многоканальных доплеровских фильтров суммарного и разностного каналов, седьмым входом блока вторичной обработки и шестым входом блока первичной обработки, третий выход блока вторичной обработки соединен со вторым входом импульсного модулятора, второй выход блока первичной обработки соединен с пятым входом блока вторичной обработки, первый и второй выходы измерителя скорости и сноса соединены с третьим и четвертым входами блока вторичной обработки соответственно, второй выход привода антенны дополнительно соединен со вторым входом блока вторичной обработки, четвертый выход блока вторичной обработки соединен с восьмым входом блока первичной обработки, блок первичной обработки содержит последовательно соединенные пороговый обнаружитель, первую схему И, пороговый селектор размера цели, последовательно соединенные интегратор, схема вычисления разности, вычислитель дисперсии, пороговое устройство и устройство выдачи информации, последовательно соединенные измеритель доплеровской частоты цели, вторая схема И, и устройство выдачи информации, первый и второй выходы которого являются вторым и первыми выходами блока первичной обработки, сумматор, соединенный со вторым входом устройства выдачи информации, причем второй вход блока первичной обработки соединен со вторыми входами порогового обнаружителя и измерителя доплеровской частоты цели, четвертым входом вычислителя математического ожидания и шестым входом вычислителя дисперсии, выход порогового обнаружителя соединен с первыми входами вычислителя дисперсии и второй схемы И, третий вход блока первичной обработки соединен с третьими входами порогового обнаружителя, интегратора, измерителя доплеровской частоты цели, вычислителя математического ожидания, шестым входом устройства выдачи информации, вторым входом порогового селектора размера цели и первым входом вычислителя дисперсии, первый вход блока первичной обработки соединен с четвертым входом вычислителя дисперсии и первыми входами порогового обнаружителя, интегратора и измерителя доплеровской частоты цели и вторым входом первой схемы И, четвертый вход блока первичной обработки соединен со вторым входом интегратора, второй выход порогового селектора размера цели соединен с пятым входом устройства выдачи информации, выход схемы вычисления разности соединен со вторым входом вычислителя математического ожидания, выход первой схемы И дополнительно соединен с первым входом вычислителя математического ожидания, пятый вход блока первичной обработки соединен с первым входом сумматора и вторым входом схемы вычисления разности, седьмой вход блока первичной обработки соединен со вторым входом сумматора, шестой вход блока первичной обработки соединен с четвертым входом устройства выдачи информации.
Согласно предлагаемому способу принимаемые сигналы как в суммарном, так и разностном каналах после усиления на промежуточной частоте преобразуют на видеочастоту посредством квадратурно-фазового детектирования при помощи опорных колебаний, генерируемых возбудителем передатчика с формированием двух квадратурных составляющих для каждого сигнала, затем проводят согласованную фильтрацию квадратурных составляющих импульсных сигналов на видеочастоте, которая в случае сложных, в частности ЛЧМ сигналов, приводит к сжатию сигнала по времени, в результате чего на выходах квадратурных каналов соотношение сигнал/шум по мощности повышается в Nсж раз (Nсж - коэффициент сжатия), при этом получаются сжатые сигналы:
UΣcosϕ, UΣsinϕ и UΔcosϕ, UΔsinϕ,
где:
ϕ - начальная фаза принимаемых колебаний относительно опорных колебаний,
UΣ и UΔ - амплитуда сигналов после согласованных фильтров в суммарном и разностном каналах соответственно, причем величина UΔ может быть как положительной, так и отрицательной (в зависимости от положения направления на цель относительно равносигнального направления).
Следующей операцией является многоканальная доплеровская фильтрация огибающей суммарного сигнала в диапазоне частот Доплера fД:
где FП - частота повторения зондирующих импульсов РЛС.
Частота повторения зондирующих импульсов FП выбирается из соображений обеспечения измерения как максимальной задержки отраженного сигнала цели, так и однозначного измерения максимальной ширины доплеровского спектра сигнала пассивных помех ΔfДmax:
Полоса пропускания доплеровских фильтров δfД выбирается ниже в два раза минимальной полосы ΔfОДО спектра межпериодных флюктуации ОДО для обеспечения возможности правильного измерения ширины доплеровского спектра пассивной помехи по дискретным выборкам и определения центра тяжести спектра для задания начальных условий последующего автосопровождении сигнала цели по дальности. Общее число доплеровских фильтров при этом равно  которое обеспечивает, при априорно неопределенной радиальной скорости цели, возможность определить ширину доплеровского спектра сигнала.
которое обеспечивает, при априорно неопределенной радиальной скорости цели, возможность определить ширину доплеровского спектра сигнала.
Многоканальная доплеровская фильтрация (когерентное накопление сигнала с фиксированных направлений) во всем диапазоне рабочих задержек сигнала позволяет повысить разрешение РЛС по азимутальному углу, что позволяет отделить сигнал цели от помехи, если их спектры не перекрываются, увеличить соотношение сигнал/помеха от берега (моря). Если спектры сигнала цели и помехи перекрывается, то увеличение разрешения РЛС по углу в ряде случаев позволяет обнаружить сигнал цели, если при этом эффективная площадь рассеяния (ЭПР) цели оказывается больше ЭПР разрешаемого элемента поверхности (помехи).
Покажем это. Пусть линейный азимутальный размер разрешаемого элемента поверхности на анализируемой дальности равен δLаз. При угле между вектором скорости ЛА и осью РСН βVO обеспечивается выбором полосы пропускания доплеровских фильтров δfД, равной

где: β - угол между осью ЛА и РСН антенной системы,
α - угол сноса ЛА.
При линейном азимутальном размере ПК ΔL<δLаз соотношение сигнал/помеха равно
где:
σЦ - эффективная площадь цели,
σO - удельная эффективная площадь отражения от поверхности Земли,
 - угол между нормалью к разрешаемому элементу поверхности Земли и направлением разрешаемый элемент-РЛС,
- угол между нормалью к разрешаемому элементу поверхности Земли и направлением разрешаемый элемент-РЛС,
δR - разрешение РЛС по дальности.
Видно, что соотношение С/П увеличивается при увеличении разрешения РЛС по поверхности Земли (уменьшении δLаз и δR). При σЦ=200 м2, σO=0,03, δR=20 м, ΔL==20 м и  значение С/П>20 дБ. Этого вполне достаточно для надежной селекции полезного сигнала ПК на фоне отражений от моря (берега). При ухудшении разрешения по углу (доплеровской частоте) в 10 раз это соотношение ухудшается на 10 дБ, и вероятность правильной селекции сигнала НК на фоне отражений от моря становится недопустимо малой.
значение С/П>20 дБ. Этого вполне достаточно для надежной селекции полезного сигнала ПК на фоне отражений от моря (берега). При ухудшении разрешения по углу (доплеровской частоте) в 10 раз это соотношение ухудшается на 10 дБ, и вероятность правильной селекции сигнала НК на фоне отражений от моря становится недопустимо малой.
После проведения многоканальной доплеровской фильтрации производится определение по заданному уровню ширины спектра ΔfД с наиболее мощной спектральной составляющей из числа составляющих, превысивших первый порог обнаружения (Рпор1), определяемый допустимой вероятностью ложного обнаружения за счет шумов.
где:
ΔjД - число доплеровских ячеек, занимаемых сигналом цели на анализируемой дальности,
jmax - номер доплеровского фильтра, соответствующий максимальной частоте спектра сигнала на анализируемой дальности,
jmin - номер доплеровского фильтра, соответствующий минимальной частоте спектра сигнала на анализируемой дальности,
FП - частота повторения зондирующих импульсов,
N - число когерентно накапливаемых выборок сигнала на анализируемой дальности.
Найденная ширина спектра ΔjД сравнивается с заранее выбранным вторым пороговым значением (Kпор2), соответствующим максимальной ширине спектра сигнала, отраженного от цели для тех же условий визирования.

где
δβv - азимутальное угловое разрешение по поверхности Земли, соответствующее реализуемому частотному разрешению ΔfД,
ΔfОДО - расчетная ширина доплеровского спектра сигнала, отраженного от ОДО (зависит только от λ),
β - угол между осью ЛА и РСН антенной системы,
α - угол сноса ЛА.
При превышении ΔjД>Kпор2 принимается решение о наличии ложной цели и о переходе к анализу следующего элемента дальности. При наличии мощной узкополосной спектральной составляющей проводится определение соответствия принятого сигнала третьему критерию ложной цели: дисперсия разности пеленга и доплеровского угла (ψ) на анализируемой дальности больше третьего порога (Dψ>Dпор3). Для его пояснения рассмотрим отличия в сигналах, отраженных НК и ОДО, выявляющиеся при многоканальной доплеровской фильтрации и последующей моноимпульсной оценке пеленга разрешаемого элемента сцены.
Корпус корабля (НК) представляет жесткую конструкцию, поэтому отражающие зондирующий сигнал диполи, находящиеся в пределах элемента, разрешаемого по дальности и по доплеровской частоте, имеют близкую радиальную скорость относительно ЛА, соответственно угловой азимутальный разнос между разрешаемыми элементами (ΔβVЦ), определяемый по доплеровскому сдвигу, равен угловому разносу (ΔγЦ), определяемому по моноимпульсным пеленгам тех же разрешаемых элементов.
где:
ΔfДЦ - доплеровский разнос частоты отраженных сигналов для разрешаемых элементов НК.
Ширина спектра НК на анализируемой дальности не зависит от скорости НК, она зависит только от углового азимутального размера разрешаемого по дальности элемента НК:
где:
ΔβНК - угловой азимутальный размер НК на разрешаемой дальности R,
ΔLНК - линейный азимутальный размер НК на разрешаемой дальности R.
Радиальная скорость НК приводит к смещению доплеровского сдвига отраженного сигнала относительно доплеровской частоты сигнала от того же разрешаемого элемента при неподвижном НК на величину
где: Vрнк - проекция скорости НК на направление ЛА-НК.
Из модели отражения сигнала от НК следует, что для разности "пеленга" и "доплеровского" углов, разрешаемых элементов НК на анализируемой дальности и определяемых выражением:
ψi=γi-βi,
Dψ=M{(ψi-Mψ)2}<Dпор3,
где:
(AΣ(i), AΔ(i)) - скалярное произведение суммарного AΣ(i) и разностного AΔ(i) сигналов от i-того разрешаемого по частоте элемента НК,
k1 - масштабирующий коэффициент,
Mψ - математическое ожидание разности углов,
Dψ - дисперсия разности углов,
γi - пеленг i-того разрешаемого по частоте элемента НК от РСН,
βi - "доплеровский угол" i-того разрешаемого по частоте элемента НК,
δfД - полоса пропускания доплеровских фильтров (разрешение РЛС по частоте).
В отличие от НК ОДО состоит из множества хаотично расположенных в облаке диполей, каждый из которых движется в турбулентной среде со своей скоростью и направлением, соответственно, радиальная скорость РЛС - одиночный диполь имеет большой разброс относительно среднего значения. Соответственно, спектр отражений от ОДО относительно центральной частоты доплеровского спектра имеет вид [6, с.272], где ввиду симметрии показана только половина.
В разрешаемом по дальности элементе объема ОДО диполи с одинаковыми радиальными скоростями отражают зондирующий сигнал со случайной амплитудой и фазой. Суммарный сигнал от этих диполей соответствует отражению сигнала от энергетического центра, случайно расположенного в пределах разрешаемого по дальности объема ОДО. Соответственно его пеленг случайно расположен в пределах разрешаемого по дальности объема ОДО. Угловые положения энергетических центров отражения от диполей с другими радиальными скоростями в текущий момент времени независимы в пределах того же разрешаемого по дальности объема. Из модели отражения сигнала от ОДО следует, что геометрический угловой размер ОДО не совпадает как с угловым размером ОДО, вычисляемым по ширине спектра, так и по пеленгам разрешаемых по дальности и частоте элементам ОДО. При этом:
ψi=γi-βi≠const,

Δγi≠Δβi,
ΔiД=imax-imin,
Δγi=γimax-γimin,
Dψ>Dпор3
где:
ΔiД - разница номеров доплеровских фильтров, соответствующих границам доплеровского спектра ОДО,
Δγi - угловой размер ОДО, вычисленный по пеленгам разрешаемых элементов на границах доплеровского спектра,
Δβi - угловой размер ОДО, вычисленный по разности доплеровских частот на границах доплеровского спектра,
Dψ - дисперсия оценки разности углов ψi на анализируемой дальности.
Для всех целей, оставшихся после селекции по трем критериям, фиксируется их дальность (R), доплеровский сдвиг сигнала (fД), азимутальный угол, отсчитанный от вектора скорости (βV) как сумма текущего угла РСН (β), отсчитанного от продольной оси ЛА, угла сноса (α) и пеленга (γ):
βV=β+γ-α.
Сущность изобретения поясняется дальнейшим описанием и чертежами РЛС, реализующей данный способ:
Фиг.1 - структурная схема устройства предлагаемой моноимпульсной РЛС,
Фиг.2 - структурная схема возбудителя (В),
Фиг.3 - структурная схема генератора программируемого сигнала (ГПС),
Фиг.4 - структурная схема синхронизатора (С),
Фиг.5 - структурная схема цифрового согласованного фильтра (ЦСФ),
Фиг.6 - структурная схема многоканального доплеровского фильтра (МДФ),
Фиг.7 - структурная схема пакета доплеровских фильтров (ПДФ),
Фиг.8 - структурная схема блока объединения квадратур (БОК),
Фиг.9 - структурная схема дискриминатора угла (ДУ),
Фиг.10 - алгоритм работы блока вторичной обработки (БВО),
Фиг.11 - структурная схема порогового обнаружителя (ПО),
Фиг.12 - структурная схема порогового селектора размера цели (ПСРЦ),
Фиг.13 - структурная схема вычислителя дисперсии (ВДО),
Фиг.14 - структурная схема интегратора (ИНТ),
Фиг.15 - структурная схема вычислителя математического ожидания (ВМО),
Фиг.16 - структурная схема измерителя доплеровской частоты цели (ИДЧЦ),
Фиг.17 - структурная схема устройства выдачи информации (УВИ).
На фиг.1 представлена структурная схема устройства предлагаемой моноимпульсной РЛС, где приняты следующие обозначения:
1 - привод антенны (ПА),
2 - антенна (А),
3 - суммарно-разностный преобразователь (СРП),
4 - антенный переключатель (АП),
5 - усилитель мощности (УМ),
6 - возбудитель (В),
7 - синхронизатор (С),
8 - импульсный модулятор(ИМ),
9 - двухканальный приемник (Пр),
10 - квадратурный фазовый детектор суммарного канала (КФД-С),
11 - квадратурный фазовый детектор разностного канала (КФД-Р),
12 - фазовращатель (ФВ),
13 - видеоусилитель суммарного канала (ВУ-С),
14 - видеоусилитель разностного канала (ВУ-Р),
15 - цифровой согласованный фильтр суммарного канала (СФ-С),
16 - цифровой согласованный фильтр разностного канала (СФ-Р),
17 - многоканальный доплеровский фильтр суммарного канала (МДВ-С),
18 - многоканальный доплеровский фильтр разностного канала (МДВ-Р),
19 - блок объединения квадратур (БОК),
20 - дискриминатор угла (ДУ),
21 - делитель (Дел),
22 - блок первичной обработки (БПО),
23 - блок вторичной обработки (БВО),
24 - измеритель скорости и сноса (ИСС),
25 - двухканальный усилитель высокой частоты (УВЧ),
26 - двухканальный балансный смеситель (БСМ),
27 - двухканальный усилитель промежуточной частоты (УПЧ),
28 - пороговый обнаружитель (ПО),
29 - первая схема И (И1),
30 - пороговый селектор размера цели (ПСРЦ),
31 - вычислитель дисперсии (ВДО),
32 - интегратор (ИНТ),
33 - схема вычисления разности (СВР),
34 - вычислитель математического ожидания (ВМО),
35 - пороговое устройство (ПУ),
36 - измеритель доплеровской частоты цели (ИДЧЦ),
37- вторая схема И (И 2),
38- сумматор (Сум),
39 - устройство выдачи информации (УВИ).
Предлагаемое устройство моноимпульсной РЛС по фиг.1 содержит последовательно соединенные антенный переключатель 4, суммарно-разностный преобразователь 3 и антенну 2, усилитель мощности 5, привод антенны 1, двухканальный приемник 9, первый выход которого через квадратурно-фазовый детектор 10 суммарного канала соединен с входом видеоусилителя 13 суммарного канала, второй выход двухканального приемника 9 через выход квадратурно-фазовый детектор 11 разностного канала соединен с входом видеоусилителя 14 разностного канала, цифровые согласованные фильтры 15 суммарного и 16 разностного каналов, блок объединения квадратур 19, дискриминатор угла 20, блок первичной обработки 22 и блок вторичной обработки 23, при этом привод антенны 1 кинематически связан с третьим входом антенны 2, второй выход суммарно-разностного преобразователя 3 соединен со вторым входом двухканального приемника 9, третий выход антенного переключателя 4 соединен с первым входом двухканального приемника 9, синхронизатор 7 через импульсный модулятор 8 соединен со вторым входом усилителя мощности 5, второй выход возбудителя 6 соединен с третьим входом двухканального приемника 9, третий выход возбудителя 6 соединен со вторыми входами квадратурных фазовых детекторов 10 суммарного и 11 разностного каналов, первый выход двухканального приемника 9 соединен с первым входом квадратурного фазового детектора 10 суммарного канала, второй выход двухканального приемника 9 соединен с первым входом квадратурного фазового детектора 11 разностного канала, второй выход блока вторичной обработки 23 соединен с входом привода антенны 1, второй выход которого соединен с седьмым входом блока первичной обработки 22, вход блока объединения квадратур 19 соединен с первым входом дискриминатора угла 20, выход блока объединения квадратур 19 соединен со вторым входом блока первичной обработки 22, четвертый выход возбудителя 6 соединен с входом синхронизатора 7, первый выход блока вторичной обработки 23 соединен с четвертым входом блока первичной обработки 22, первый выход которого соединен с первым входом блока вторичной обработки 23, двухканальный приемник 9 содержит последовательно соединенные по двум входам-выходам суммарного и разностного каналов двухканальный усилитель высокой частоты 25, балансный смеситель 26, третий (гетеродинный) вход которого является третьим гетеродинным входом приемника 9, первый и второй выходы усилителя высокой частоты 25 являются входами, а первый и второй выходы усилителя промежуточной частоты 27 выходами суммарного и разностного каналов приемника 9 соответственно, введены многоканальные доплеровские фильтры суммарного 17 и разностного 18 каналов, фазовращатель 12, делитель 21 и измеритель скорости и сноса 24, при этом третий выход возбудителя 6 через фазовращатель 12 соединен с третьими входами квадратурных фазовых детекторов суммарного 10 и разностного 11 каналов, выход видеоусилителя суммарного канала 13 через цифровой согласованный фильтр суммарного канала 15 подключен к первому входу многоканального доплеровского фильтра суммарного канала 17, выход видеоусилителя разностного канала 14 через цифровой согласованный фильтр разностного канала 16 подключен к первому входу многоканального доплеровского фильтра разностного канала 18, выход блока объединения квадратур 19 соединен с первым входом делителя 21, выход которого соединен с пятым входом блока первичной обработки 22, первый выход возбудителя 6 через усилитель мощности 5 соединен с первым входом антенного переключателя 4, четвертый выход возбудителя 6 соединен со вторыми входами цифровых согласованных фильтров суммарного 15 и разностного 16 каналов, вторыми входами многоканальных доплеровских фильтров суммарного 17 и разностного 18 каналов и первым входом блока первичной обработки 22, первый выход синхронизатора 7 дополнительно соединен с входом возбудителя 6 и пятыми входами многоканальных доплеровских фильтров суммарного 17 и разностного 18 каналов, выход многоканального доплеровского фильтра суммарного канала 15 соединен с входом блока объединения квадратур 19, выход многоканального доплеровского фильтра разностного канала 18 соединен со вторым входом дискриминатора угла 20, выход которого соединен со вторым входом делителя 21, второй выход синхронизатора 7 соединен с третьим входом блока первичной обработки 22, четвертый выход синхронизатора 7 соединен с третьими входами многоканальных доплеровских фильтров суммарного 17 и разностного 18 каналов и шестым входом блока вторичной обработки 23, третий выход синхронизатора 7 соединен с четвертыми входами многоканальных доплеровских фильтров суммарного 17 и разностного 18 каналов, седьмым входом блока вторичной обработки 23 и шестым входом блока первичной обработки 22, третий выход блока вторичной обработки 23 соединен со вторым входом импульсного модулятора 8, второй выход блока первичной обработки 22 соединен с пятым входом блока вторичной обработки 23, первый и второй выходы измерителя скорости и сноса 24 соединены с третьим и четвертым входами блока вторичной обработки 23 соответственно, второй выход привода антенны 1 дополнительно соединен со вторым входом блока вторичной обработки 23, четвертый выход блока вторичной обработки 23 соединен с восьмым входом блока первичной обработки 22, блок первичной обработки 22 содержит последовательно соединенные пороговый обнаружитель 28, первую схему И 29, пороговый селектор размера цели 30, последовательно соединенные интегратор 32, схема вычисления разности 33, вычислитель дисперсии 31, пороговое устройство 35 и устройство выдачи информации 39, последовательно соединенные измеритель доплеровской частоты цели 36, вторая схема И 37, и устройство выдачи информации 39, первый и второй выходы которого являются вторым и первыми выходами блока первичной обработки 22, сумматор 38, соединенный со вторым входом устройства выдачи информации 39, причем второй вход блока первичной обработки 22 соединен со вторыми входами порогового обнаружителя 28 и измерителя доплеровской частоты цели 36, четвертым входом вычислителя математического ожидания 34 и шестым входом вычислителя дисперсии 31, выход порогового обнаружителя 28 соединен с первыми входами вычислителя дисперсии 31 и второй схемы И 37, третий вход блока первичной обработки 22 соединен с третьими входами порогового обнаружителя 28, интегратора 32, измерителя доплеровской частоты цели 36, вычислителя математического ожидания 34, шестым входом устройства выдачи информации 39, вторым входом порогового селектора размера цели 30 и первым входом вычислителя дисперсии 31, первый вход блока первичной обработки 22 соединен с четвертым входом вычислителя дисперсии 31 и первыми входами порогового обнаружителя 28, интегратора 32 и измерителя доплеровской частоты цели 36 и вторым входом первой схемы И 29, четвертый вход блока первичной обработки 22 соединен со вторым входом интегратора 32, выход порогового селектора размера цели 30 соединен с пятом входом устройства выдачи информации 39, выход схемы вычисления разности 33 соединен со вторым входом вычислителя математического ожидания 34, выход первой схемы И 29 дополнительно соединен с первым входом вычислителя математического ожидания 34, пятый вход блока первичной обработки 22 соединен с первым входом сумматора 38 и вторым входом схемы вычисления разности 33, седьмой вход блока первичной обработки 22 соединен со вторым входом сумматора 38, шестой вход блока первичной обработки 22 соединен с четвертым входом устройства выдачи информации 39.
На фиг.2 представлена структурная схема возбудителя (В) 6, где приняты следующие обозначения:
40 - первый умножитель частоты (УЧ 1),
41 - первый генератор программируемого сигнала (ГПС 1),
42 - первый генератор сдвинутого сигнала (ГСС 1),
43 - второй умножитель частоты (УЧ 2),
44 - задающий генератор (ЗГ),
45 - третий умножитель частоты (УЧ 3),
46 - четвертый умножитель частоты (УЧ 4),
47 - второй генератор программируемого сигнала (ГПС 2),
48 - второй генератор сдвинутого сигнала (ГСС 2),
49 - пятый умножитель частоты (УЧ 5).
На схеме возбудителя 6 (фиг.2) последовательно соединены задающий генератор 44, первый умножитель частоты 40, первый генератор сдвинутого сигнала 42 и второй умножитель частоты 43, выход которого является вторым выходом возбудителя 6, выход первого генератора программируемого сигнала 41 соединен со вторым входом генератора сдвинутого сигнала 42, вход возбудителя 6 соединен с первыми входами первого 41 и второго 47 генераторов программируемого сигнала, выход задающего генератора 44 дополнительно соединен с входами четвертого умножителя частоты 46, третьего умножителя частоты 45, вторыми входами первого 41 и второго 47 генераторов программируемого сигнала и является четвертым выходом возбудителя 6, выход второго генератора программируемого сигнала 47 через последовательно соединенные второй генератор сдвинутого сигнала 48 и пятый умножитель частоты 49 подключен к первому выходу возбудителя 6, выход четвертого умножителя частоты 46 соединен с первым входом второго генератора сдвинутого сигнала 48, выход третьего умножителя частоты 45 является третьим выходом возбудителя 6.
На фиг.3 представлены структурные схемы генераторов программируемого сигнала (ГПС) 41 и 47, которые аналогичны. На фиг.3 приняты следующие обозначения:
50 - первый счетчик (СИ 1),
51 - первое постоянное запоминающее устройство (ПЗУ 1),
52 - цифро-аналоговый преобразователь (ЦАП),
53 - первый фильтр низкой частоты (ФНЧ).
На схеме генератора программируемого сигнала 41 (фиг.3) первый и второй входы первого счетчика 50 являются первым и вторым входом генератора программируемого сигнала 41 соответственно, выход первого счетчика 50 через последовательно соединенные первое ПЗУ 51, цифроаналоговый преобразователь 52 и фильтр низкой частоты 53 подключен к выходу генератора программируемого сигнала 41.
На фиг.4 представлена структурная схема синхронизатора (С) 7, где приняты следующие обозначения:
54 - первая кодовая шина (КШ 1),
55 - второй счетчик (СИ 2),
56 - первый триггер (ТГ 1),
57 - вторая кодовая шина (КШ 2),
58 - третий счетчик (СИ 3),
59 - четвертый счетчик (СИ 4),
60 - второй триггер (ТГ 2),
61 - пятый счетчик (СИ 5),
62 - третья кодовая шина (КШ 3),
63 - четвертая кодовая шина (КШ 4),
64 - дешифратор (ДС).
На схеме синхронизатора 7 (фиг.4) вход синхронизатора соединен с первыми входами второго счетчика 55, третьего счетчика 58 и пятого счетчика 61, выход второго счетчика 55 через первый триггер 56 соединен со вторым входом третьего счетчика 58, выход третьего счетчика 58 соединен со вторым входом первого триггера 56, второй выход первого триггера 56 соединен со вторым и первым входами второго 55 и четвертого 59 счетчиков соответственно и является первым выходом синхронизатора 7, выходы первой кодовой шины 54, второй кодовой шины 57, третьей кодовой шины 62 и четвертой кодовой шины 63 соединены с третьими входами второго 55, третьего 58, четвертого 59 и пятого 61 счетчиков соответственно, выход четвертого счетчика 59 соединен с первым входом второго триггера 60, первый выход которого соединен со вторым входом пятого счетчика 61, второй выход пятого счетчика 61 соединен с входом дешифратора 64 и является третьим выходом синхронизатора 7, первый выход пятого счетчика 61 соединен со вторым входом второго триггера 60, второй выход которого соединен со вторым входом четвертого счетчика 59, выход дешифратора 64 является вторым выходом синхронизатора 7.
На фиг.5 представлена структурная схема цифрового согласованного фильтра (ЦСФ) 15 (16), где приняты следующие обозначения:
65 - первый аналого-цифровой преобразователь (АЦП 1),
66 - первый сдвиговый регистр (СДР 1),
67 - первый весовой умножитель (ВУм 1),
68 - второй сумматор (Сум 2),
69 - третий сумматор (Сум 3),
70 - второй весовой умножитель (Вум 2),
71 - второй аналого-цифровой умножитель (АЦП 2),
72 - второй сдвиговый регистр (СДР 2).
На схеме (фиг.5) квадратурная косинусная составляющая сигнала, поступающая на первый вход цифрового согласованного фильтра 15, подключена к первому входу первого АЦП 65, а синусная - к первому входу второго АЦП 71, второй вход цифрового согласованного фильтра 15 подключен ко вторым входам первого 65 и второго 71 АЦП, первого 66 и второго 72 сдвигающих регистров, выход первого АЦП 65 подключен к первому (информационному) входу первого сдвигающего регистра 66, выходы которого с первого по Q-й через первые весовые усилители с первого по Q-й (поз. 671...67Q) подключены к одноименным входам второго сумматора 68, выход второго АЦП 71 подключен к первому (информационному) входу второго сдвигающего регистра 72, выходы которого с первого по Q-й через вторые весовые усилители с первого по Q-й (поз. 701...70Q) подключены к одноименным входам третьего сумматора 69, выходы второго 68 и третьего сумматора 69 являются квадратурными составляющими выхода цифрового согласованного фильтра 15.
На фиг.6 представлена структурная схема многоканального доплеровского фильтра (МДФ) 17 (18), где приняты следующие обозначения:
73 - третий сдвиговый регистр (СДР 3),
74k - k-й блок доплеровских фильтров (БДФ k),
75k - первый регистр (РГ 1k),
76k - первый пакет к-го доплеровского фильтра (ПДФ 1k),
77 - мультиплексор.
Согласно схемы фиг.6 второй вход третьего сдвигового регистра 73 является вторым входом многоканального доплеровского фильтра 17, первый вход которого соединен со вторыми входами блоков доплеровских фильтров с первого (поз.741) по m-й (поз.74m), третий вход многоканального доплеровского фильтра 17 соединен с третьими входами блоков доплеровских фильтров с первого (поз.741) по m-й (поз.74m), пятый вход многоканального доплеровского фильтра 17 соединен с первым входом третьего сдвигового регистра 73 и четвертыми входами блоков доплеровских фильтров с первого (поз.741) по m-й (поз.74m), выходы третьего сдвигового регистра 73 с первого по m-й соединены с первыми входами блоков доплеровских фильтров с первого по m-й (поз. с 741 по 74m) соответственно, N выходов каждого из блоков доплеровских фильтров с первого по m-й (поз. с 741 по 74m) соединены с входами со второго по (m·N+1)-й мультиплексора 77, причем номер входа мультиплексора 77 для i-го выхода k-го блока доплеровских фильтров (где i=1...N, k=1...m) равен (k-1)·N+1+i, первый вход мультиплексора 77 является четвертым входом многоканального доплеровского фильтра 17, выход мультиплексора 77 является выходом многоканального доплеровского фильтра 17, первый вход каждого из m блоков доплеровских фильтров (741...74m) соединен с первым входом первого регистра 75k, выход которого соединен с входом пакета доплеровских фильтров 76k, второй вход блока доплеровских фильтров 74р соединен со вторым входом первого регистра 75k, третий вход блока доплеровских фильтров 74k соединен со вторым входом пакета доплеровских фильтров 76k, четвертый вход блока доплеровских фильтров 74k соединен с третьим входом пакета доплеровских фильтров 76k, выходы пакета доплеровских фильтров 76k с первого по N-й являются выходами блока доплеровских фильтров 74k с первого по N-й соответственно.
На фиг.7 представлена структурная схема пакета доплеровских фильтров (ПДФ) 76, где приняты следующие обозначения:
78 - третий триггер (ТГ 3),
79 - третья схема И (И 3),
80 - четвертая схема И (И 4),
81 - шестой счетчик (СИ 6),
82i - i-й доплеровский фильтр (ДФi),
83i - второе постоянное запоминающее устройство (ПЗУ 2i),
84i - первый умножитель (Умн 1i),
85i - второй умножитель (Умн 2i),
86i - третий умножитель (Умн 3i),
87i - четвертый умножитель (Умн 4i),
88i - вторая схема вычисления разности (СВР 2i),
89i - четвертый сумматор (Сум 4i),
90i - второй интегратор (Инт 2i),
91i - третий интегратор (Инт 3i).
Согласно схеме фиг.7 второй вход пакета доплеровских фильтров 76 соединен с первыми входами третьего триггера 78, третьей 79 и четвертой 80 схемы И, третий вход пакета доплеровских фильтров 76 соединен со вторыми входами третьего триггера 78 и четвертой схемы И 80, выход третьего триггера 78 соединен со вторым входом третьей схемы И 79, выход которой соединен со вторым входом шестого счетчика 81 и вторыми входами доплеровских фильтров с первого по N-й (поз.821...82N), выход четвертой схемы И 80 соединен с первым входом шестого счетчика 81 и первыми входами доплеровских фильтров с первого по N-й (поз.821...82N), выход шестого счетчика 81 соединен с третьими входами доплеровских фильтров с первого по N-й (поз.821...82N), первый вход пакета доплеровских фильтров 76 соединен с четвертыми входами доплеровских фильтров с первого по N-й (поз.821...82N), каждый доплеровский фильтр 82; содержит второе ПЗУ 83i, умножители с первого 84i по четвертый 87i, вторую схему вычисления разности 88i, четвертый сумматор 89i, второй 90i и третий интегратор 91i, при этом косинусные составляющие фильтруемого сигнала с четвертого входа доплеровского фильтра 82i подключены к первым входам первого 84i и третьего 86i умножителей, синусные составляющие фильтруемого сигнала с четвертого входа доплеровского фильтра 82i подключены к первым входам второго 85i и четвертого 87i умножителей, вторые входы первого 84i и четвертого 87i умножителей соединены с синусным выходом второго ПЗУ 83i, косинусный выход которого соединен со вторыми входами второго 85i и третьего 86i умножителей, выходы первого 84i и второго 85i умножителей соединены с первым и вторым входом второй схемы вычисления разности 88i, выход которой соединен со вторым входом второго интегратора 90i, выходы третьего 86i и четвертого 87i умножителей соединены с первым и вторым входом четвертого сумматора 89i, выход которого соединен со вторым входом третьего интегратора 91i, первый вход доплеровского фильтра 82i соединен с первыми входами второго 90i и третьего интеграторов 91i, второй вход доплеровского фильтра 82i соединен с третьими входами второго 90i и третьего интеграторов 91i, выходы второго 90i и третьего 91i интеграторов являются квадратурными выходами доплеровского фильтра 82i, выходы N доплеровских фильтров (поз.821...82N) являются выходами пакета доплеровских фильтров 76 с первого по N-й.
На фиг.8 представлена структурная схема блока объединения квадратур (19), где приняты следующие обозначения:
92 - пятый умножитель (Умн 5),
93 - шестой умножитель (Умн 6),
94 - пятый сумматор (Сум 5).
На фиг.8 косинусная квадратурная составляющая входного сигнала блока объединения квадратур 19 подключена к первому и второму входам шестого умножителя 93, выход которого соединен с первым входом пятого сумматора 94, синусная составляющая квадратурного входного сигнала блока объединения квадратур 19 подключена к первому и второму входам пятого умножителя 92, выход которого соединен со вторым входом пятого сумматора 94, выход пятого сумматора 94 является выходом блока объединения квадратур 19.
На фиг.9 представлена структурная схема дискриминатора угла (ДУ) 20, где приняты следующие обозначения:
95 - седьмой умножитель (Умн 7),
96 - восьмой умножитель (Умн 8),
97 - шестой сумматор (Сум 6).
На схеме фиг.9 синусная квадратурная составляющая с первого входа дискриминатора угла 20 соединена с первым входом седьмого умножителя 95, выход которого соединен со вторым входом шестого сумматора 97, косинусная квадратурная составляющая с первого входа дискриминатора угла 20 соединена с первым входом восьмого умножителя 96, выход которого соединен с первым входом шестого сумматора 97, синусная квадратурная составляющая со второго входа дискриминатора угла 20 соединена со вторым входом седьмого умножителя 95, косинусная квадратурная составляющая со второго входа дискриминатора угла 20 соединена со вторым входом восьмого умножителя 96, выход шестого сумматора 97 является выходом дискриминатора угла 20.
На фиг.10 представлен алгоритм работы блока вторичной обработки (БВО) 23, где приняты следующие обозначения:
РС1 - первое разрешение съема информации,
РС2 - второе разрешение съема информации.
На фиг.11 представлена структурная схема порогового обнаружителя (28), где приняты следующие обозначения:
98 - третий сдвиговый регистр (СДР 3),
99k - третий весовой умножитель (ВУм 3k),
100 - пятая кодовая шина (КШ 5),
101 - седьмой сумматор (Сум 7),
102 - первый компаратор (Комп 1).
На фиг.11 первый, второй и третий входы порогового обнаружителя (28) соединены со вторым, первым и третьим входами третьего сдвигового регистра 98 соответственно, выходы сдвигового регистра 98 с первого по q-й через третьи весовые умножители (поз.991...99q) соединены с входами с первого по q-й седьмого сумматора 101 соответственно, выход седьмого сумматора 101 соединен с первым входом первого компаратора 102, выход пятой кодовой шины 100 соединен со вторым входом первого компаратора 102, выход которого является выходом порогового обнаружителя 28.
На фиг.12 представлена структурная схема порогового селектора размера цели (ПСРЦ) 30, где приняты следующие обозначения:
103 - седьмой счетчик (СИ 7),
104 - второй компаратор (Комп 2),
105 - четвертый триггер (ТГ 4).
На схеме фиг.12 первый вход порогового селектора размера цели 30 соединен с первым (счетным) входом седьмого счетчика 103, выход которого соединен с первым входом второго компаратора 104, третий вход порогового селектора размера цели 30 соединен со вторым входом второго компаратора 104, выход которого соединен со вторым входом четвертого триггера 105, второй вход порогового селектора размера цели 30 соединен со вторым входом седьмого счетчика 103 и первым входом четвертого триггера 105, выход которого является выходом порогового селектора размера цели 30.
На фиг.13 представлена структурная схема вычислителя дисперсии (ВДО) 31, где приняты следующие обозначения:
106 - четвертый сдвиговый регистр (СДР 4),
107 - третья схема вычисления разности (СВР 3),
108 - схема вычисления квадрата (KB),
109 - пятый сдвиговый регистр (СДР 5),
110 - пятая схема И (И 5),
111 - девятый умножитель (Умн 9),
112 - четвертый интегратор (Инт 4),
113 - второй делитель (Дел 2).
На фиг.13 четвертый вход вычислителя дисперсии 31 соединен со вторыми входами четвертого 106 и пятого 109 сдвиговых регистров и пятой схемы И 110, первый вход вычислителя дисперсии 31 соединен с третьими входами четвертого 106 и пятого 109 сдвиговых регистров и четвертого интегратора 112, выход которого соединен с первым входом второго делителя 113, второй вход вычислителя дисперсии 31 соединен с первым входом четвертого сдвигового регистра 106, выход которого соединен с первым входом третьей схемы вычисления разности 107, пятый вход вычислителя дисперсии 31 соединен со вторым входом третьей схемы вычисления разности 107, выход которой соединен с входом схемы вычисления квадрата 108, выход которой соединен со вторым входом девятого умножителя 111, шестой вход вычислителя дисперсии 31 соединен с первым входом девятого умножителя 111, выход которого соединен со вторьм входом четвертого интегратора 112, третий вход вычислителя дисперсии 31 соединен с первьм входом пятого сдвигового регистра 109, выход которого соединен с первым входом пятой схемы И 110, выход пятой схемы И 110 соединен с первым входом четвертого интегратора 112, седьмой вход вычислителя дисперсии 31 соединен со вторым входом второго делителя 113, выход которого является выходом вычислителя дисперсии.
На фиг.14 представлена структурная схема интегратора (Инт) 32, (90, 91) где приняты следующие обозначения:
114 - восьмой сумматор (Сум 8),
115 - второй регистр (РГ 2).
На схеме фиг.14 второй вход интегратора 32 соединен с первым входом восьмого сумматора 114, выход которого соединен с первым входом второго регистра 115, выход второго регистра 115 соединен со вторым входом восьмого сумматора 114 и является выходом интегратора 32, второй и третий входы второго регистра 115 являются третьим и первым входом интегратора 32 соответственно.
На фиг.15 представлена структурная схема вычислителя математического ожидания (ВМО) 34, где приняты следующие обозначения:
116 - пятый интегратор (Инт 5),
117 - третий регистр (РГ 3),
118 - третий делитель (Дел 3),
119 - десятый умножитель (Умн 10),
120 - шестой интегратор (Инт 6),
121 - четвертый регистр (РГ 4).
На фиг.15 третий вход вычислителя математического ожидания 34 соединен с третьими входами пятого 116 и шестого 120 интеграторов, вторыми входами третьего 117 и четвертого 121 регистров, первый вход вычислителя математического ожидания 34 соединен с первыми входами пятого 116 и шестого 120 интеграторов, второй вход вычислителя математического ожидания 34 через последовательно соединенные десятый умножитель 119, пятый интегратор 116, третий регистр 117 и третий делитель 118 соединен с первым выходом вычислителя математического ожидания 34, выход шестого интегратора 120 через четвертый регистр 121 соединен со вторым входом третьего делителя 118 и вторым выходом вычислителя математического ожидания 34, вторые входы десятого умножителя 119 и шестого интегратора 120 соединены с четвертым входом вычислителя математического ожидания 34.
На фиг.16 представлена структурная схема измерителя доплеровской частоты цели (ИДЧЦ) 36, где приняты следующие обозначения:
122 - шестой сдвиговый регистр (СДР 6),
123 - четвертый весовой умножитель (ВУм 4),
124 - девятый сумматор (Сум 9),
125 - детектор нуля (ДО).
На фиг.16 первый, второй и третий входы шестого сдвигового регистра 122 являются вторым, первым, и третьим входом измерителя доплеровской частоты цели 36 соответственно, выходы шестого сдвигового регистра 122 с первого по q-й через q четвертых весовых умножителей 1231...l23q соединен с одноименными входами девятого сумматора 124, выход которого через детектор нуля 125 соединен с выходом измерителя доплеровской частоты цели 36.
На фиг.17 представлена структурная схема устройства выдачи информации (УВИ) 39, где приняты следующие обозначения:
126 - пятый регистр (РГ 5),
127 - шестой регистр (РГ 6),
128 - седьмой регистр (РГ 7),
129 - восьмой регистр (РГ 8),
130 - девятый регистр (РГ 9),
131 - десятый регистр (РГ 10),
132 - схема ИЛИ,
133 - одиннадцатый регистр (РГ 11),
134 - шестая схема И (И 6),
135 - формирователь разрешения съема информации (ФРС).
На схеме фиг.17 первый вход устройства выдачи информации 39 соединен со вторыми входами пятого 126, шестого 127 и седьмого 128 регистров, второй вход устройства выдачи информации 38 соединен с первым входом пятого регистра 126, выход которого соединен с первым входом восьмого регистра 129, код адреса опрашиваемой ячейки (i, j) вводится в устройство выдачи информации 39 через четвертый вход, причем код строки i с четвертого входа устройства выдачи информации 39 подключен к первому входу шестого регистра 127, выход которого соединен с первым входом девятого регистра 130, код столбца j с четвертого входа устройства выдачи информации 39 подключен к первому входу седьмого регистра 128, выход которого соединен с первым входом десятого регистра 131, третий и пятый входы устройства выдачи информации 39 соединены с первым и вторым входами схемы ИЛИ 132, выход которой через последовательно соединенные одиннадцатый регистр 133 и шестую схему И 134 подключен к входу формирователя разрешения съема информации 135, вторые входы одиннадцатого регистра 133 и шестой схемы И 134 соединены с шестым входом устройства выдачи информации 39, выход формирователя разрешения съема информации 135 соединен со вторыми входами восьмого 129, девятого 130 и десятого 131 регистров и является вторым выходом устройства выдачи информации 39, выходы восьмого 129, девятого 130 и десятого 131 регистров совместно являются первым выходом устройства выдачи информации 39.
Антенна 2 может быть построена в виде зеркала с 2-рупорным облучателем, соединенным волноводами с суммарно-разностным преобразователем 3.
Суммарно-разностный преобразователь 3 может быть построен на основе волноводных Т-мостов.
Антенный переключатель 4 может быть выполнен в виде трехплечевого ферритового Y-циркулятора.
Усилитель мощности 5 может быть реализован в зависимости от требуемой мощности и полосы усиливаемых частот на основе амплитрона, клистрона, лампы бегущей волны или полупроводникового прибора [11, с.19, 20, 25, 42...47].
Импульсный модулятор 8 в зависимости от параметров усилителя мощности 5 реализуется по известным схемам [11, с.103...107, рис.43...45].
Блок вторичной обработки 23 может быть построен на базе цифрового процессора, работа которого состоит в последовательном решении задач, представленных на блок-схеме алгоритма (фиг.10).
Измерителем скорости и угла сноса 24 может быть доплеровский измеритель скорости и угла сноса [10, с.368...370, рис.11.16].
Двухканальный усилитель высокой частоты 25 в двухканальном приемнике 9 может быть реализован в виде транзисторного двухканального СВЧ усилителя
Двухканальный балансный смеситель 26 в двухканальном приемнике 9 может быть выполнен по схеме [11, с.144].
Пороговый обнаружитель 28 может быть выполнен по схеме, аналогичной [9, с.181 рис 2.36].
Измеритель доплеровской частоты цели 36 может быть выполнен по схеме, аналогичной [9, с.255 рис 3.17].
В соответствии со схемами фиг.1-17 РЛС, реализующая предлагаемый способ, работает следующим образом.
Перед началом работы в блок вторичной обработки 23 РЛС, алгоритм работы которого приведен на фиг.10, вводятся из системы управления данные о начале βн и конце βк сектора сканирования, далее информация о начальном положении сектора сканирования βн с блока вторичной информации 23 вводится в привод антенны 1. Привод антенны 1 с этого момента поворачивает антенну 2 в заданное положение и выдает в блок вторичной обработки 23 данные о текущем угле между поворачиваемой осью РСН антенны 2 и осью ЛА. Блок вторичной обработки 23 сравнивает эту информацию с заданным начальным положением. При совпадении текущего угла β с заданным βн блок вторичной обработки 23 включает излучение подачей соответствующей команды на второй вход импульсного модулятора 8. СВЧ сигналы, генерируемые возбудителем 6 на частоте Fc, проходят в усилитель мощности 5, в котором они усиливаются, и под действием импульсного модулятора 8, управляемого импульсами от синхронизатора 7, следующими с частотой повторения FП, формируются зондирующие импульсы. Они проходят антенный переключатель 4, суммарно-разностный преобразователь 3 и излучаются антенной 2 в заданное пространство. Отраженные сигналы принимаются антенной 2, проходят на суммарно-разностный преобразователь 3, где на первом выходе формируется суммарный, а на втором разностный сигналы. Суммарный сигнал с первого выхода суммарно-разностного преобразователя 3 через антенный переключатель 4 поступает на первый (суммарный) вход двухканального усилителя высокой частоты 25. Одновременно сигналы разности со второго выхода суммарно-разностного преобразователя 3 поступают на второй (разностный) вход усилителя высокой частоты 25. Суммарный и разностные сигналы усиливаются в двухканальном усилителе высокой частоты 25 и попадают с двухканальный балансный смеситель 26. В смесителе 26 происходит супергетеродинное преобразование принимаемых сигналов на промежуточную частоту, причем в качестве гетеродинных колебаний используется колебания СВЧ частоты Fr, формируемые в возбудителе 6 и поступающие со второго выхода возбудителя 6 на третий (гетеродинный) вход двухканального балансного смесителя 26.
Возбудитель 6 (фиг.2) работает следующим образом. Задающий генератор 44 генерирует непрерывные колебания стабильной частоты FO, из которых путем умножения в трех умножителях частот 40, 45 и 46 получают частоты F1, F2 и F3, равные
F1=n1·FO - частота на выходе первого умножителя 40,
F2=n2·FO - частота на выходе четвертого умножителя 46,
F3=(n1-n2)·n3·FO=Fпр - частота на выходе третьего умножителя 45.
Колебания с частотой F1 сдвигаются по частоте на величину частоты, генерируемой первым программируемым генератором (ГПС1) 41 с помощью первого генератора сдвинутого сигнала (ГСС1) 42. Далее частота с выхода генератора сдвинутого сигнала 42 умножается в n3 раз во втором умножителе частоты 43 и становится равной гетеродинной Fг:
Fг=n3·FГССl=n3·(F1+FГПС1)=n3·(n1·FO+fсм),
где
fсм - частота смещения выбрана максимально возможной, исходя из возможностей генератора программируемого сигнала 41 (47) формировать сигнал в заданной полосе частот,
FГССl - частота на выходе первого генератора сдвига 42,
FГПС1 - частота на выходе первого программируемого генератора 41,
n3 - коэффициент умножения частоты во втором умножителе 43.
Аналогично формируется частота несущей Fc путем сдвига частоты F2 на величину частоты, формируемой вторым программируемым генератором (ГПС2) 47 и последующем умножении ее в умножителе 49 на коэффициент n3, равный коэффициенту умножения во втором умножителе 43. В отличие от ГПС1 41, генератор ГПС2 47 формирует ЛЧМ-сигнал с частотой FГПС2=fсм+kO·t, поэтому частота несущей равна:
Fc=n·FГСС2=n3·(F2+FГПС2)=n3·(F2+fсм+kO·t)=n3·(n2·FO+fсм+kO·t).
Промежуточная частота при смешивании отраженного сигнала с гетеродином будет равна
Fпр=Fc-FГ=(n2-n1)·n3·FO
и соответствует частоте на выходе третьего умножителя частоты.
Частота задающего генератора 44 FO без умножения поступает на четвертый выход возбудителя 6 и используется для хронизации всех процессов обработки сигнала.
Генератор программируемого сигнала 41 (47) может быть выполнен по схеме фиг 3. На его второй вход приходит хронирующая частота FO, на первый вход - модулирующий импульс с первого выхода синхронизатора 7. Период и длительность модулирующего импульса соответствуют зондирующему. При приходе модулирующего импульса на первый вход первого счетчика 50 снимается запрет счета хронирующих импульсов, поступающих на его второй вход. С этого момента код счетчика 50 линейно изменяется и поступает на адресный вход первого постоянного запоминающего устройства (ПЗУ) 51, в памяти которого с шагом периода хронирующих импульсов записаны оцифрованные выборки сигнала с частотой либо FГПС1 либо с частотой FГПС2 в зависимости от исполнения. Оцифрованные выборки выходного сигнала на выходе первого ПЗУ 51 с помощью цифроаналогового преобразования 52 переводятся в аналоговую форму, и после фильтрации высокочастотных составляющих аналоговый сигнал на выходе фильтра низкой частоты 53 является выходом генератора программируемой частоты 41 (47). Частота хронизации выбирается, исходя из обеспечения 4·FГПС<FO (условия правильного восстановления сигнала по его дискретным выборкам и возможности подавления нежелательных гармоник частоты FO в аналоговом сигнале FГПС путем фильтрации.
Генераторы сдвига сигнала 42 и 48 могут быть реализованы с помощью схемы с фазовой автоподстройкой частоты [7, с.190 рис.4.10, 4.11]. Подобный вариант получения сигнала, сдвинутого по частоте, обеспечивает получение выходного сигнала с наилучшими спектральными характеристиками по амплитудным и фазовым шумам.
После супергетеродинного преобразования сигналов в двухканальном балансном смесителе 26 сигналы в суммарном и разностном каналах усиливаются по промежуточной частоте в двухканальном усилителе промежуточной частоты 27, затем поступают на первые (сигнальные) входы соответствующих квадратурных фазовых детекторов 10 в суммарном канале и 11 в разностном канале.
На вторые входы (входы опорной частоты) квадратурных фазовых детекторов 10 и 11 - поступают опорные колебания с третьего выхода возбудителя 6. На третьи входы квадратурных фазовых детекторов 10 и 11 опорная частота с третьего выхода возбудителя 6 поступает через 90-градусный фазовращатель 12. После квадратурно-фазового детектирования образуются видеоимпульсы, которые через соответствующие видеоусилители суммарного 13 и разностного каналов 14 поступают на цифровые согласованные фильтры 15 и 16. Полоса пропускания видеоусилителей 13 и 14 равна ширине спектра зондирующего сигнала. Цифровые согласованные фильтры 15 и 16 аналогичны и могут быть выполнены по схеме фиг.5. Косинусная составляющая входного квадратурного сигнала цифрового согласованного фильтра 15 (16) приходит на первый вход первого аналого-цифрового преобразователя (АЦП 1) 65 и оцифровывается с периодом хронирующих импульсов То, приходящих на его второй вход. Аналогично синусная составляющая входного сигнала проходит на первый вход второго АЦП 71 и оцифровывается с тем же периодом. Выходные сигналы первого 65 и второго 71 АЦП поступают на два квадратурных канала сжатия, построенных по аналогичной схеме. Канал сжатия косинусной составляющей состоит из первого сдвигового регистра 66, первых весовых умножителей 671...67Q и второго сумматора 68. Канал сжатия синусной составляющей построен аналогично с отличием в значениях коэффициентов умножения весовых умножителей 701...70Q) от весовых коэффициентов умножителей 671...67Q. В косинусном квадратурном канале опорная функция ЛЧМ сигнала записана в виде коэффициентов

где:
 - номер выборки сигнала, взятого с периодом хронирующих импульсов TO=1/FO,
- номер выборки сигнала, взятого с периодом хронирующих импульсов TO=1/FO,
Q - длина опорного сигнала (соответствует длине зондирующего), выраженная в числе выборок с периодом ТO,
kO и n3 - коэффициенты, используемые при формировании несущей частоты FC,
р - заранее известная константа.
В синусном квадратурном канале опорная функция в виде весовых коэффициентов весовых умножителей 701...70Q равна - sin(2π·kO·n3·q2·T2 O)=cos(p·q)2. Квадратурные составляющие сжатого сигнала снимаются с выходов второго 68 и третьего 69 сумматоров и представляют выходной сигнал цифрового согласованного фильтра 15 (16). Развертки сжатых по времени сигналов суммарного и разностного каналов с цифровых согласованных фильтров 15 и 16 поступают в многоканальные доплеровские фильтры суммарного 17 и разностного 18 каналов соответственно.
Многоканальные доплеровские фильтры 17 и 18 аналогичны и могут быть выполнены по схеме фиг.6, работа каждого их них происходит в следующей последовательности.
Сигнал модуляции периода и длительности зондирующего сигнала ТП с первого выхода синхронизатора 7 поступает на первый (информационный) вход третьего сдвигового регистра 73, импульсы сдвига с частотой выборки сигнала FO поступают на второй вход третьего сдвигового регистра 73. Информационный сигнал, проходя через сдвиговый регистр 73, задерживается и снимается с m выходов. Величина задержки сигнала относительно входного на k-м выходе равна k·ТO. Таким образом, на m выходах третьего сдвигового регистра 73 имеем импульсы, используемые для синхронизации выборок из развертки входного сжатого сигнала на m дальностях. С первого выхода третьего сдвигового регистра 73 сигнал поступает на первый (управляющий) вход регистра 1l (поз.75l) первого блока доплеровских фильтров 74]. По сигналу, поступившему на управляющий вход регистра 1l (поз.75l), с развертки сжатого по времени сигнала, поступившего на первый вход многоканального доплеровского фильтра 17 (18) делается выборка квадратурного сигнала с первой дальности. Содержание регистра 1l (поз.75l) обновляется в каждом периоде зондирующих импульсов и подается на пакет доплеровских фильтров 76l, в котором производится многочастотная доплеровская фильтрация сигнала, приходящего с первой анализируемой дальности. Аналогично производится многочастотная доплеровская фильтрация на остальных (m-1) дальностях в блоках доплеровской фильтрации 742...74m. Все пакеты доплеровских фильтров 76k аналогичны и обеспечивают получение квадратурных составляющих спектра на N частотах с равномерным шагом, равным FП/N. Полоса пропускания каждого фильтра пакета равна  Значения найденных спектральных квадратур последовательно в соответствии с кодом опрашиваемой разрешаемой ячейки частота-дальность, приходящем с третьего выхода синхронизатора 7 на первый вход мультиплексора 77, подаются на выход многоканального доплеровского фильтра 17 (18).
Значения найденных спектральных квадратур последовательно в соответствии с кодом опрашиваемой разрешаемой ячейки частота-дальность, приходящем с третьего выхода синхронизатора 7 на первый вход мультиплексора 77, подаются на выход многоканального доплеровского фильтра 17 (18).
Структурная схема варианта построения пакета доплеровских фильтров 76 приведена на фиг.7. Работа пакета доплеровских фильтров 76 происходит следующим образом. Выборка оцифрованного сжатого сигнала с анализируемой дальности поступает с первого входа пакета доплеровских фильтров 76 на N доплеровских фильтров 821...82N (ввиду идентичности схем доплеровских фильтров на фиг.7 изображены 1-й и i-й, где i=1...N), информационными входами которых являются первые входы первых 841...84N, вторых 851...85N, третьих 861...86N, и четвертых умножителей 871...87N. Период повторения зондирующих импульсов ТП=1/FП (такт выборки сигнала на анализируемой дальности) выбирается из условия обеспечения однозначного определения как максимальной задержки отраженного сигнала цели Rmax так и максимальной ширины доплеровского спектра сигнала ΔfДmax:
Каждый из фильтров 82i состоит из генератора квадратур опорной частоты, выполненного на втором постоянном запоминающем устройстве (ПЗУ 2i) поз.83i, умножителей квадратур опоры с квадратурами оцифрованного сжатого сигнала на анализируемой дальности Умн 1i, Умн 2i, Умн 3i и Умн 4i (поз.84i, 85i, 86i и 87i), второй схемы вычисления разности 88i, четвертого сумматора 89i, интеграторов Инт 2i (поз.90i) и Инт 3i (поз.91i). Выходы интеграторов Инт 2i (поз.90i) и Инт 3i (поз.91i) являются квадратурными выходами доплеровского фильтра 82i, выдаваемыми на i-м выходе пакета доплеровских фильтров 76. Накопление сигнала происходит в течение Ткг=N·TП, где N - число накапливаемых выборок сигнал, учтено прошивкой второго ПЗУ 83i. При этом значения квадратур (косинусная C(i) и синусная S(i) составляющие на частоте fi) отфильтрованного в полосе 1/Ткг сигнала равны:


где:
Ac(q) и As(q) - значения косинусных и синусных квадратур входного сигнала в q-й выборке, поступающего на первые входы умножителей 84i, 85i, 86i и 87i,
 - номер выборки сигнала.
- номер выборки сигнала.
Временная развертка квадратур опорного сигнала с частотой fi=i/Tкг; записанного в ПЗУ 83i, обеспечивается линейно возрастающим кодом шестого счетчика 81, поступающим на вход ПЗУ 83i. Шестой счетчик 81 с нулевого значения, устанавливаемого импульсом, приходящим на его второй вход, считает число излученных импульсов с периодом ТП, приходящие на его первый вход с четвертой схемы И 80 в течение времени накопления сигнала (единичного значения сигнала РС1 на втором входе пакета доплеровских фильтров 76, приходящего с четвертого выхода синхронизатора 7). Выходные импульсы четвертой схемы И 80, кроме того, поступают на первые входы второго 90i и третьего 91i интеграторов, синхронизируя прием в них входной информации. Входными импульсами третьей схемы И 79 являются положительный импульс РС1 и он же, задержанный на период ТП, с выхода третьего триггера 78. Третья схема И 79 формирует импульс установки шестого счетчика 81 и интеграторов Инт 2i (поз.90i) и Инт 3i (поз.91i) в исходное положение. Длительность импульса с выхода третьей схемы И 79 равна ТП и предшествует началу следующего интервала накопления (PC1=1), благодаря этому результат фильтрации в течение интервала опроса, когда PC1=0, сохраняется до его окончания.
Схемы интеграторов 32, 90 и 91 аналогичны и приведены на фиг.14. Входной интегрируемый сигнал приходит на первый вход восьмого сумматора 114. На второй его вход приходит выходной сигнал интегратора 32, снимаемый с выхода второго регистра 115. Результат суммирования с выхода восьмого сумматора 114 записывается во второй регистр 115 с тактом поступления входного сигнала (импульсы, приходящие на третий вход второго регистра 115). Обнуление интегратора производится перед началом его работы импульсом, приходящим на второй вход третьего регистра 115.
Для случая работы интегратора в доплеровском фильтре такт поступления информации равен периоду зондирующих импульсов ТП, а обнуление его производится положительным фронтом импульса PC1=0 (соответствует концу опроса разрешаемых ячеек сцены и началу когерентного накопления), формируемого на втором выходе синхронизатора 7.
Выходы многоканальных доплеровских фильтров суммарного 17 и разностного 18 каналов подключены к дискриминатору угла 20 (фиг.9), который вычисляет скалярное произведение входных сигналов:
W(i, j)=CΣ(i, j)-CΔ(i, j)+SΣ(i, j)-SΔ(i, j),
где:
i и j - номера разрешаемых элементов по частоте и дальности соответственно.
SΔ(i, j) - синусная квадратурная составляющая на выходе многоканального доплеровского фильтра разностного канала для (i, j) разрешаемого элемента сцены,
SΣ(i, j) - синусная квадратурная составляющая на выходе многоканального доплеровского фильтра суммарного канала для (i, j) разрешаемого элемента сцены,
CΔ(i, j) - косинусная квадратурная составляющая на выходе многоканального доплеровского фильтра разностного канала для (i, j) разрешаемого элемента сцены,
CΣ(i, j) - косинусная квадратурная составляющая на выходе многоканального доплеровского фильтра суммарного канала для (i, j) разрешаемого элемента сцены.
Выход квадратур разрешаемых элементов сцены многоканального доплеровского фильтра суммарного канала поступает также на блок объединения квадратур 19 (фиг.8), вычисляющий мощность суммарного сигнала для каждого элемента сцены по формуле:
P(i, j)=|AΣ(i, j)|2=(CΣ(i, j))2+(CΔ(i, j))2
Результат вычисления P(i, j) используется в дальнейшем для обнаружения сигнала и получения пеленга разрешаемого элемента сцены γ(i, j) - отклонения углового положения разрешаемого (i, j) элемента сцены от РСН. Пеленг вычисляется в делителе 21 и равен

где k1 - масштабирующий коэффициент.
Выходы делителя 21 и блока объединения квадратур 19 поступают в блок первичной обработки 22, работа которого происходит в следующей последовательности.
При окончании накопления сигнала сигнал РС1 на выходе синхронизатора 7 переходит в логический ноль и поступает на блок вторичной обработки 23, подготавливая его к приему информации об измеренных координатах целей с блока первичной обработки 22, а также на третьи входы многоканальных доплеровских фильтров каналов суммы 17 и разности 18, прекращая когерентное накопление сигналов. В течение времени, когда PC1=0, производится опрос значений измеренных суммарных и разностных сигналов в разрешаемых частотно-временных ячейках многоканальных фильтров суммы и разности 17 и 18. Код опрашиваемых ячеек формируется синхронизатором 7 на третьем выходе в течение времени, когда РС1=0. По окончании опроса задним фронтом сигнала РС1=0 обнуляется измеренная за время накопления информация о разрешаемых частотно-временных элементах сцены в многоканальных доплеровских фильтрах 17 и 18. Код опрашиваемых частотно-временных ячеек изменяется от нуля вверх построчно, начиная с опроса ячеек по частоте с минимальным номером на минимальной рабочей дальности. Переход на соседнюю дальность производится после опроса частотной ячейки с максимальным номером. При окончании опроса каждой частотной строки синхронизатор 7 выдает импульс Tстр, поступающий на блок первичной обработки 22 для обнуления результатов анализа сигналов по строке.
Первый этап селекции анализируемых в блоке первичной обработки сигналов 22 - обнаружение сигналов по превышению первого порога, определяемого расчетным соотношением сигнал/шум, выполняется пороговым обнаружителем 28, на второй вход которого с блока объединения квадратур 19 приходит развертка строки сигнала по частоте в суммарном канале на текущей дальности. Темп приема информации синхронизирован импульсами хронизации с частотой FO, поступившими на первый вход БПО 22 с четвертого выхода возбудителя 6. Вариант схемы построения порогового обнаружителя 28 приведен на фиг.11, работа которого описана в [9, с.181, рис 2.36] и происходит в следующей последовательности.
Развертка строки сигнала по частоте с выхода БОК 19 приходит на первый (информационный) вход третьего сдвигового регистра 98 и записывается с тактом хронирующих импульсов ТO, приходящих на его второй (сдвиговый) вход, в скользящем окне длиною q элементов. Выходы сдвигового регистра 98 через весовые усилители 991...99q подключены к седьмому сумматору 101, выход которого поступает на первый компаратор 102, на второй вход которого с пятой кодовой шины 100 подается значение порога обнаружения. При превышении порога обнаружения на выходе первого компаратора 102 появляется логическая единица. Число разрядов q, подключенных к седьмому сумматору 101, определяется шириной спектра истинной цели, весовые коэффициенты весовых умножителей 991...99q описывают ожидаемый спектр полезного сигнала. В конце строки перед приемом следующей содержание третьего регистра 98 обнуляется импульсом Тстр, приходящим на его третий вход.
Параллельно обнаружению сигнала в частотной строке в измерителе доплеровской частоты цели 36 (фиг.16) производится определение положения энергетического центра доплеровского спектра (соответствующий номер доплеровского фильтра). Схема измерителя 36 аналогична измерителю, описанному в [9, с.255, рис.3.17]. На его вход приходят те же сигналы, что и на пороговый обнаружитель 28. Структурно схема измерителя доплеровской частоты цели 36 близка к схеме обнаружителя 28. На девятый сумматор 124 приходят взвешенные сигналы с выходов шестого сдвигового регистра 122. Весовые коэффициенты выбраны так, чтобы выход девятого сумматора 124 соответствовал выходу дифференциального коррелятора, определяющего в скользящем окне из q элементов отклонение центра окна от энергетического центра спектра. При прохождении сигнала рассогласования энергетического центра спектра сигнала через нуль на выходе сумматора 124 изменится знак, который будет обнаружен детектором нуля 125. При этом на его выходе появится импульс длительностью То в виде логической единицы, который позволит в устройстве выдачи информации 39 сосчитать код доплеровской частоты цели (код положения разрешаемой ячейки по частоте). Выход детектора нуля 125 является выходом измерителя доплеровской частоты цели 36.
Пороговый селектор размера цели 30 (фиг.12) определяет ширину доплеровского спектра предполагаемой цели (частотный размер цели) по числу импульсов То, прошедших через первую схему И 29 и совпавших с сигналом обнаружения с выхода порогового обнаружителя 28. Данное число определяется на каждой опрашиваемой строке сигнала по частоте, ограниченной периодом сигнала Тстр. Пороговый селектор размера цели 30 работает следующим образом.
Сигнал Тстр в конце каждой строки (до начала развертки строки) обнуляет седьмой счетчик 103. При приходе импульсов с первой схемы И 29 на счетный вход седьмого счетчика 103 они сосчитываются, увеличивая выходной код счетчика. Задним фронтом импульса Tстр в конце строки код седьмого счетчика 103 обнуляется. В процессе счета (измерения частотного размера цели) код седьмого счетчика 103 сравнивается со вторым порогом (Kпор2), приходящем на второй вход второго компаратора 104 с четвертого выхода блока вторичной обработки 23. При превышении кодом счетчика 103 второго порога срабатывает второй компаратор 104, выходной импульс которого устанавливает четвертый триггер 105 в единицу. Данное состояние триггера 105 держится до появления заднего фронта импульса Тстр в конце строки. Выход четвертого триггера 105 является вторым выходом порогового селектора размера цели 30, единичное состояние которого означает запрет устройству выдачи информации 39 в выдаче координат этой цели в систему управления, так как ее сигнал по ширине спектра соответствует сигналу пассивной помехи.
До начала опроса сигналов в многоканальных доплеровских фильтрах 17 и 18, когда на шестом входе блока вторичной обработки (БВО) 23 сигнал PC1=1, согласно алгоритма фиг.10 блок БВО 23 принимает информацию с измерителя скорости и угла сноса 24 о текущем угле сноса α и скорости ЛА V и угле визирования РСН относительно оси ЛА β с привода антенны 1. На основе этого БВО 23 определяет текущий угловой разнос направлений на соседние разрешаемые по частоте элементы сцены δβV и выдает его на четвертый вход блока первичной обработки 22. В процессе изменения адреса опроса разрешаемых ячеек сцены по дальности (приходит на его седьмой вход, при РС1=РС2=0 на шестом и первом входе соответственно) блок вторичной обработки 22 рассчитывает второй порог Кпор2 и выдает его с четвертого выхода на восьмой вход блока первичной обработки 22 (третий вход порогового селектора размера цели).

Rj=j·ΔR=j·c·To/2
где:
] [ - целая часть числа,
ΔL - максимальный ожидаемый тангенциальный линейный размер НК на анализируемой дальности в условиях визирования,
ΔR - цена младшего разряда кода опрашиваемой дальности (шаг между соседними опрашиваемыми ячейками сцены по дальности),
j - адрес опрашиваемой ячейки по дальности (времени). Код j приходит на седьмой вход блока вторичной обработки 23 с третьего выхода синхронизатора 7.
Значение δβV c четвертого входа блока первичной обработки 22 поступает на интегратор 32, выходной код которого с тактом опроса ячеек по частоте То увеличивается на величину входного сигнала и соответствует "доплеровскому углу" βi=i·δβV,
текущего i-го опрашиваемого по частоте элемента разрешения. В конце опроса строки перед началом приема новой информация интегратора 32 обнуляется сигналом Тстр, приходящем на его третий вход. Информация о цели/ОДО содержится в дисперсии разности ψi "доплеровского угла" βi и "пеленга" γi разрешаемых по частоте элементов на одной дальности. Для ее расчета сначала в схеме вычисления разности 33 определяется разность "доплеровского угла" на выходе интегратора 32 и "пеленга" с выхода делителя 21.
Далее для вычисленной в текущей строке разности углов ψi определяется математическое ожидание Mψ, в вычислителе математического ожидания 34. Схема вычислителя 34 приведена на фиг.15. Работа его происходит следующим образом. Информация о разности углов ψi со схемы вычислителя разности 33 поступает на первый вход десятого умножителя 119, на второй вход которого приходит сигнал с блока объединения квадратур 19 в качестве весового. Результат умножения поступает на второй (информационный) вход пятого интегратора 116. Значения весов (сигналов с блока объединения квадратур) поступают на второй (информационный) вход шестого интегратора 120, работающего аналогично пятому интегратору 116 с теми же тактами приема и сброса. Результаты интегрирования с выходов пятого 116 и шестого 120 интеграторов считываются в третий 117 и четвертый регистр 121 соответственно в конце строки импульсом Тстр, приходящим на их вторые входы. Выходы третьего 117 и четвертого регистров 121 поступают на третий делитель 118, вследствие чего на его выходе имеем вычисленное математическое ожидание, равное
где Pi - выход блока объединения квадратур на i-й частоте. Результат накопления весов с четвертого регистра 121 поступает на второй выход вычислителя математического ожидания 34 и используется в вычислителе дисперсии 31 (фиг.13), работа которого происходит следующим образом.
Текущая по строке разность углов ψi приходит на первый (информационный) вход четвертого сдвигового регистра 106 со схемы вычисления разности 33, а математическое ожидание Mψ - на второй вход третьей схемы вычисления разности 107 с вычислителя математического ожидания 34. Четвертый сдвиговый регистр 106 имеет N разрядов, равное числу опрашиваемых по частотной строке фильтров, поэтому обеспечивает задержку входного сигнала ψi на длину строки. Эта задержка соответствует задержке формирования Мψ, в вычислителе математического ожидания 34. Синхронизация приема входной информации в четвертый сдвиговый регистр 106 производится импульсами с частотой Fo, приходящими с синхронизатора 7 на его второй вход. Выход третьей схемы вычисления разности 107 равен (ψi-Mψ) и через схему вычисления квадрата 108 поступает на девятый умножитель 111. На первый вход девятого умножителя 111 приходит сигнал Pi с выхода блока объединения квадратур 19 в качестве весового. Результат умножения интегрируется четвертым интегратором 112 и поступает на второй делитель 113. На второй вход второго делителя 113 приходит найденная ранее в вычислителе математического ожидания 34 сумма весов ΣPi. В результате деления получаем искомую дисперсию сигнала:
Синхронизация приема информации с девятого умножителя 111 в четвертый интегратор 112 производится путем задержки выходного сигнала порогового обнаружителя 28 на длину строки и пропускании импульсов такта опроса сигналов по строке (импульсов с частотой Fo) через пятую схему И 110 при единичном значении задержанного сигнала обнаружения на выходе пятого сдвигового регистра 109. Обнуление сдвиговых регистров 106, 109 и интегратора 112 производится в конце строки импульсом Тстр, приходящим на первый вход вычислителя дисперсии 31 с синхронизатора 7. Выход второго делителя 113 является выходом вычислителя дисперсии 31.
Найденное значение дисперсии Dψ поступает на пороговое устройство 35, которое при превышении расчетного третьего порога формирует на выходе второй сигнал запрета, поступающий на третий вход устройства выдачи информации 39 (фиг.17), работа которого происходит следующим образом.
Координаты (коды) текущих опрашиваемых частотно-временных ячеек (i, j) приходят с синхронизатора 7 на четвертый вход УВИ 39. Соответствующий азимутальный угол βЦi=β+γi, опрашиваемого разрешаемого элемента сцены определен сумматором 38 и приходит на второй вход устройства выдачи информации 39. (β - угол между РСН и осью ЛА, приходит с привода антенны 1, γi - пеленг разрешаемой ячейки, приходит с делителя 21).
Входная перечисленная информация (i,j, βЦi) поступает на пятый 126, шестой 127 и седьмой 128 регистры и записывается в них сигналом с выхода второй схемы И 37 (сигналом, индицирующим нахождение в текущей опрашиваемой ячейке энергетического центра спектра сигнала). Записанная в регистрах 126, 127 и 128 информация переписывается в соответствующие регистры 129, 130 и 131 и поступает с них на выход в конце строки по переднему фронту импульса РС2, формируемого формирователем импульса 135 при отсутствии сигналов запрета на опрашиваемой строке на входах схемы ИЛИ 132. Импульсы запрета обнуляются в конце каждой строки, но запоминаются на период Тстр в одиннадцатом регистре 133 по переднему фронту импульса Тстр, поступающему на второй его вход, поэтому при наличии логической единицы на выходе одиннадцатого регистра 133 на выход шестой схемы И 134 не проходит импульс Тстр, соответственно, не обновляется информация о найденной цели, но и не вводится ложная. Задним фронтом импульса на выходе шестой схемы И 134 запускается формирователь разрешения съема информации 135, формирующий нормированный по длительности импульс разрешения съема информации РС2, длительность которого выбирается достаточной для надежного его обнаружения блоком вторичной обработки 22, но не более половины периода импульсов Tстр.
Блок вторичной обработки 23 представляет процессор, работающий по алгоритму, приведенному на фиг 10, предназначенный для приема исходных данных из системы управления для обзора сцены в заданном угловом секторе от βн до βк выдачи исходных данных о положении начала сектора сканирования βн в привод антенны 1, включения и выключения излучения, расчета углового разноса между соседними направлениями на разрешаемые по частоте элементы сцены δβV, порога Кпор2, и выдачи их в блок первичной обработки 22, приема из блока первичной обработки 22 результата измерения координат целей и выдачу их в систему управления.
Отдельные фрагменты алгоритма работы блока вторичной обработки 23 во взаимодействии с другими элементами схемы были описаны выше. Ниже описывается его алгоритм работы (фиг.10) более подробно. Началом работы, как отмечалось выше, является приход в блок 23 из системы управления исходных данных о границах сектора обзора сцены βн и βк. Блок вторичной обработки 23 на основании исходных данных выдает на привод антенны 1 требуемое начальное положение сектора обзора βн. Привод антенны 1 отрабатывает принятую информацию и перемещает ось РСН в требуемое направление. Блок вторичной обработки 23 переходит к анализу текущих данных об угловом положении РСН β, поступающих со второго выхода привода антенны 1 на его второй вход. При достижении β требуемого βн с блока вторичной обработки 23 выдается команда на второй вход импульсного модулятора 8, разрешающая излучение зондирующих импульсов. Далее происходит анализ сигнала РС1, формируемого синхронизатором 7. При РС1=1 (во время когерентного накопления сигнала) блок вторичной обработки 23 производит прием текущего значения скорости ЛА V и угла сноса α с измерителя скорости и угла сноса 24 и текущего значения азимутальной ориентации РСН относительно продольной оси ЛА (3 с привода антенны 1. На основании этих данных рассчитывается δβV и выдается на четвертый вход блока первичной обработки 22. Данный цикл, когда РС1=1, может повторяться до тех пор, пока значение РС1 не изменится на РС1=0 (то есть накопление закончено, начался опрос частотно-временных ячеек многоканальных доплеровских фильтров). Далее блок вторичной обработки 23 анализирует логический уровень сигнала РС2, приходящего на его первый вход с блока первичной обработки 22. При РС2=0 блок вторичной обработки 23 считывает код адреса опрашиваемых ячеек, выдаваемый синхронизатором 7 и поступающий на седьмой вход блока вторичной обработки 23, выделяет из него адрес дальности (j) и проводит расчет Кпор2. Результат расчета Кпор2 выдается на восьмой вход блока первичной обработки 22. После этого блок вторичной обработки 22 ожидает изменения нулевого логического уровня сигнала РС2 на единичный. При РС2=1 (разрешение съема информации с блока первичной обработки 22) блок вторичной обработки 23 принимает координаты обнаруженной цели (i,j, βЦi) с первого выхода устройства выдачи информации 39 и определяет азимутальную координату цели относительно вектора скорости с учетом угла сноса
βVi=βЦi-α.
Очередной прием координат обнаруженных целей производится при РС1=0 (продолжается опрос частотно-временных ячеек сцены) и появлении нового сигнала РС2=1 (сигнал обнаружения цели на новой строке опроса). При РС1=1 (закончен опрос частотно-временных ячеек сцены, начато когерентное накопление сигнала) сравнивается текущий азимутальный угол ориентации антенны β с заданной верхней границей сектора обзора βк. При не достижении границы (β≠βк), блок вторичной обработки 23 начинает повторять цикл, связанный с расчетом δβV, порогов Кпор2, накоплением сигнала, считыванием измеренных координат целей на новом азимутальном направлении антенны β, рассмотренный выше и начинающийся с проверки состояния сигнала РС1. Конец цикла связан с проверкой достижения угла между РСН антенны и продольной осью ЛА β границы βк. При достижении угла β границы βк блок вторичной обработки 23 выключает излучение (снимает разрешение работы с импульсного модулятора 8) и выдает координаты целей (i, j, βVi) в систему управления.
Синхронизатор 7 (фиг.4) предназначен для формирования импульсов модуляции зондирующих импульсов по периоду повторения и длительности (импульс ТП), интервалов накопления сигнала и опроса результатов накопления сигналов от разрешаемых элементов частотно-временной сцены (сигнала РС1), кода адреса опрашиваемых элементов сцены (i, j) и интервала опроса строки частотно-временного массива (импульс Тстр). Работа синхронизатора 7 происходит следующим образом. Хронирующие импульсы с периодом То поступают на счетные (первые) входы второго 55 и третьего 58 счетчиков. В режиме счета они работают по очереди и управляются первым триггером 56. Когда на первом выходе первого триггера 56 логическая единица, поступающая на второй (установочный) вход третьего счетчика 58, он не считает, в нем устанавливается код в соответствии с кодом, приходящим со второй кодовой шины 57. В то же время логический ноль на втором выходе первого триггера 56, поступая на второй установочный вход второго счетчика 55, разрешает ему счет импульсов, приходящих на его первый вход. Импульс переноса на выходе второго счетчика 55 возникает при переходе кода счетчика через максимальное значение. Этот импульс, поступая на первый вход первого триггера 56, изменяет его состояние на противоположное, при котором разрешается счет третьему счетчику 58, запрещается счет второму счетчику 55, и устанавливается начальный код счетчика 55 в соответствии с кодом, приходящим с первой кодовой шины 54 на его третий вход. Задавая соответствующие коды на шинах 54 и 57 на втором выходе первого триггера 56, формируется расчетный импульс модуляции периода и длительности зондирующих импульсов ТП. Формирование сигнала РС1 и кода адреса (i, j) опрашиваемых частотно-временных ячеек сцены производится аналогично рассмотренному формированию импульса ТП с помощью четвертого счетчика 59, второго триггера 60, пятого счетчика 61 и кодовых шин 62 и 63. Отличие в том, что четвертый счетчик 59 вместо импульсов То считает импульсы ТП. Объем пятого двоичного счетчика 61 (Vсч=2S) выбран кратным удвоенному максимальному коду адреса опрашиваемой ячейки сцены Кmax=jmax·imax=2S-1, где s - число разрядов счетчика 61, imax - максимальное значение номера доплеровского фильтра (в нашем случае imax=2s-1=N), jmax - максимальное значение кода разрешаемой по дальности ячейки сцены. В этом случае начальное значение младших (s-1) разрядов кода счетчика 61 (минимальное значение кода адреса опрашиваемых ячеек) равно нулю. При приходе на пятый счетчик 61 в режиме счета Кmax импульсов (формировании на втором выходе максимального кода опрашиваемой ячейки сцены) на первом выходе появится импульс переноса, запрещающий через второй триггер 60 этот счет и устанавливающий код счетчика 61 в начальное состояние в соответствии с кодом четвертой кодовой шины 63. Выход второго триггера 60 (сигнал РС1) является четвертым выходом синхронизатора 7. Единичное значение РС1 соответствует интервалу когерентного накопления, равному NTП, где N - число доплеровских фильтров в пакетах доплеровских фильтров 76, а нулевое - интервалу опроса разрешаемых ячеек сцены. Интервал опроса частотной строки Тстр формируется дешифратором 64, на вход которого подается текущий код адреса опрашиваемых ячеек со второго выхода пятого счетчика 61. Период импульсов Тстр равен NTo.
Техническим преимуществом предлагаемого способа и устройства пред прототипами [4] и [5] является повышение достоверности классификации цель/пассивная помеха (за исключением помех типа уголковый отражатель) за счет расширения возможности селекции сигналов ОДО в условиях, когда ширина его спектра близка и даже меньше ожидаемой ширины спектра сигнала цели.
Проведем расчет, подтверждающий эффективность предлагаемого решения. Пусть цель наблюдается в диапазоне R от 6 до18 км в диапазоне излучения λ=3 см, под углом β=45° относительно вектора скорости. Будем считать, что линейные азимутальные размеры НК в зависимости от условий визирования с борта ЛА и ориентации НК находятся в диапазоне 20...70 м, скорость ЛА V=300 м/с. Ширину спектра сигнала цели найдем по формуле
Из анализа табл., ширины спектра ОДО для λ=3 см, равного 53 Гц [6, с.272], и задачи отсеивания сигналов пассивных помех (ОДО, берег) целесообразно выбрать разрешение по частоте δfдс=25 Гц. Это позволяет иметь число спектральных отсчетов ОДО 2...3, найти дисперсию Dψ, сравнить с порогом и сделать правильную классификацию во всех оговоренных выше условиях R и ДЕ. В прототипе правильная классификация на R=18 км и ΔL=70 м при выбранном разрешении по частоте невозможна, так как оказалось, что ширина спектра НК равна ширине спектра ОДО и при этом вероятность правильного решения и ложной тревоги 50%. На R=6 км и ΔL=20 м расчетная ширина спектра НК равна ширине спектра ОДО, соответственно вероятность правильного решения и ложной тревоги также 50%. Продолжая анализ получим, что на дальности R=6 км при Δ L=70 м в прототипе НК будет ошибочно классифицирован как берег, так как ширина его спектра выше ширины спектра ОДО, в то же время сигнал ОДО, как узкополосный будет классифицирован как цель. Моделированием показано, что в предлагаемом способе и устройстве этого не происходит, что подтвердило достижение указанного в материалах заявки технического результата.
Таким образом, технический эффект в использовании предлагаемого способа и устройства состоит в повышении достоверности классификации цель/пассивная помеха (за исключением помех типа уголковый отражатель) за счет расширения возможности селекции сигналов ОДО в условиях, когда ширина его спектра близка и даже меньше ожидаемой ширины спектра сигнала цели. При этом сохранены безусловно полезные возможности прототипов: 1) селекции сигналов от береговой черты и ОДО при превышении ширины их спектра расчетной ширины спектра сигнала НК, 2) повышенной помехозащищенности к активным прицельным шумоподобным помехам за счет применения сложного сигнала и узкополосной доплеровской фильтрации.
На основании приведенного описания и чертежей предлагаемое устройство может быть изготовлено при использовании известных комплектующих изделий, известного в радиоэлектронной промышленности технологического оборудования и использовано на подвижных носителях в качестве РЛС для селекции целей на фоне пассивных отражений от Земли и ОДО, определения их начальных координат для выдачи в систему управления и последующего автосопровождения.
ЛИТЕРАТУРА
1. П.А.Бакулев. Радиолокация движущихся целей. - М.: Советское радио, 1964 г. (с.147).
2. Патент США 6137439 от 24.10.2000, кл. G 01 S 13/52. Continuous wave Doppler system with suppression of ground clutter.
3. Патент США 4119966 от 10.10.1978, кл. G 01 S 13/52. Clutter discriminating apparatures for use with pulsed Doppler radar systems and like.
4. Патент России 2117960 от 20.08.1998, кл. G 01 S 13/44. Способ сопровождения моноимпульсной радиолокационной станцией (прототип способа).
5. Патент России 2099739 от 20.12.1997, кл. G 01 S 13/42. Радиолокационная станция, (прототип устройства)
6. С.А.Вакин, Л.Н.Шустов. Основы радиопротиводействия и радиотехнической разведки. - М.: Советское радио, 1968 г. (с.272).
7. Защита от радиопомех под ред. Максимова М.В. - М: Советское радио, 1976 г. (с.85-88).
8. В.Манасевич. Синтезаторы частоты, теория и проектирование. - М.: Связь, 1979 г. (с.190 рис.4.10, 4.11).
9 В.А.Лихарев. Цифровые методы и устройства в радиолокации. - М.: Советское Радио, 1973. (с.181, рис.2.36; с.255 рис.3.17).
10. Е.Колчинский, И.А.Мандуровский, М.И.Константиновский. Доплеровские устройства и системы навигации. - М.: Советское Радио, 1975. (с.368-370 рис.11.16).
11 Справочник по радиолокации под ред. М. Сколник, т.3. - М.: Советское Радио, 1979 г. (с 19...47, 103...107, 144).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |

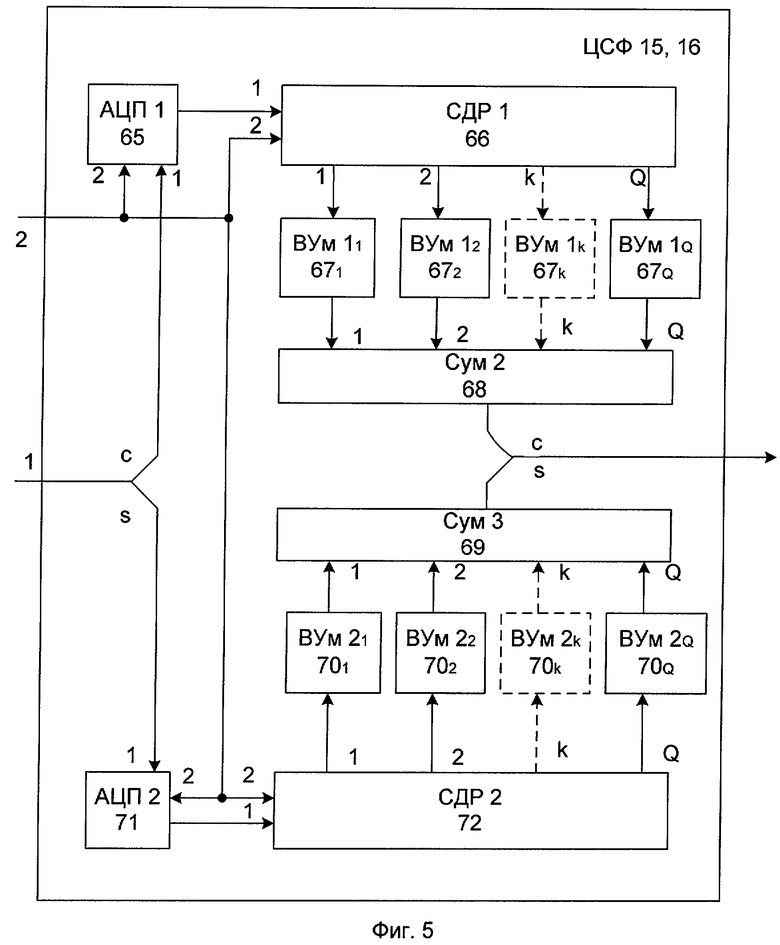
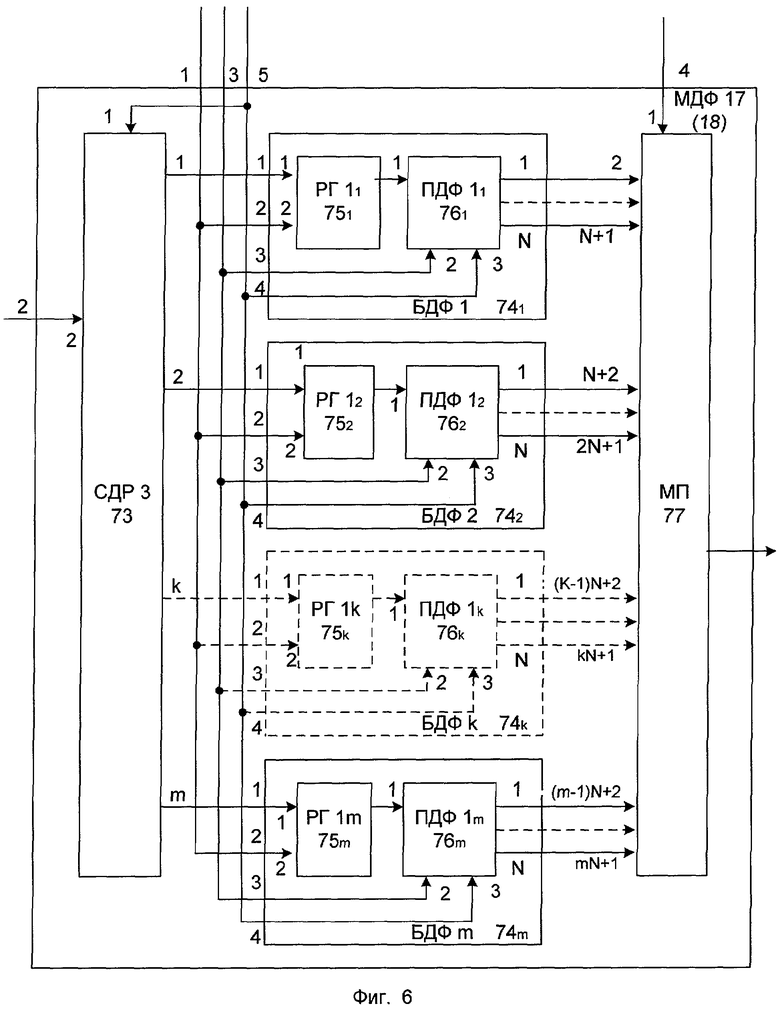
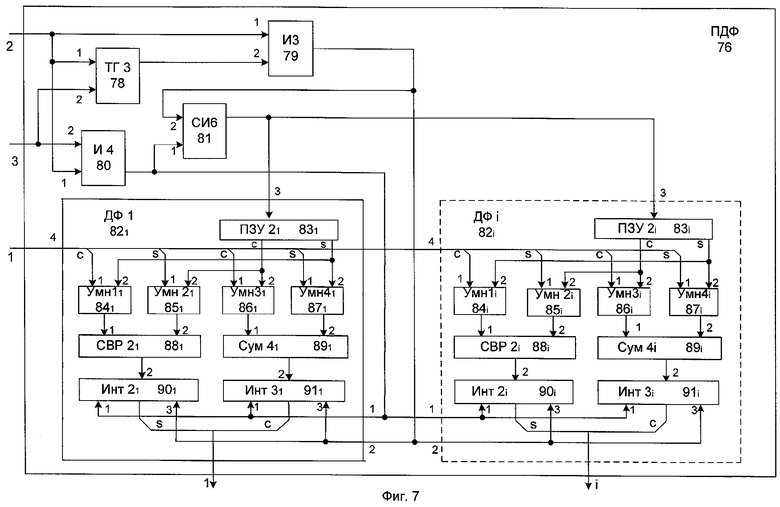
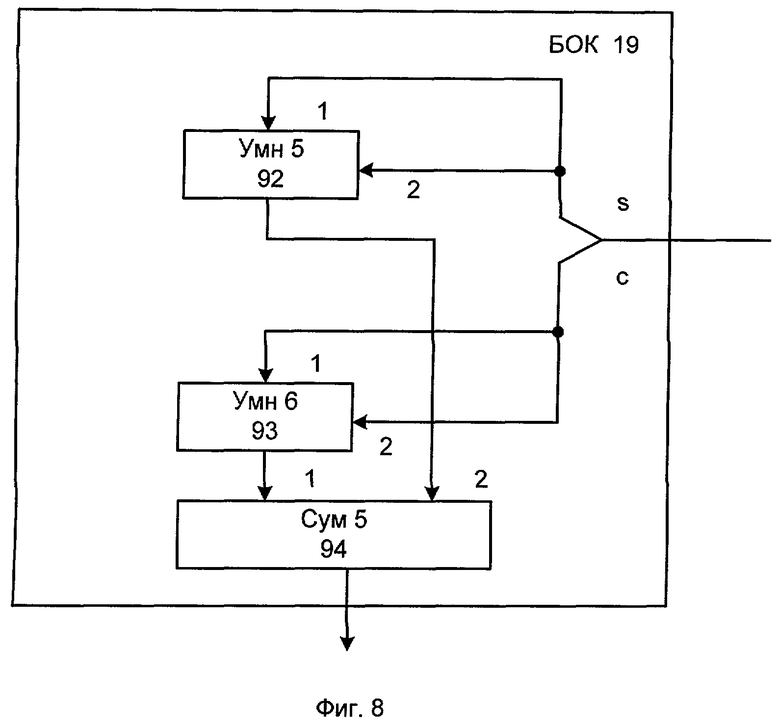


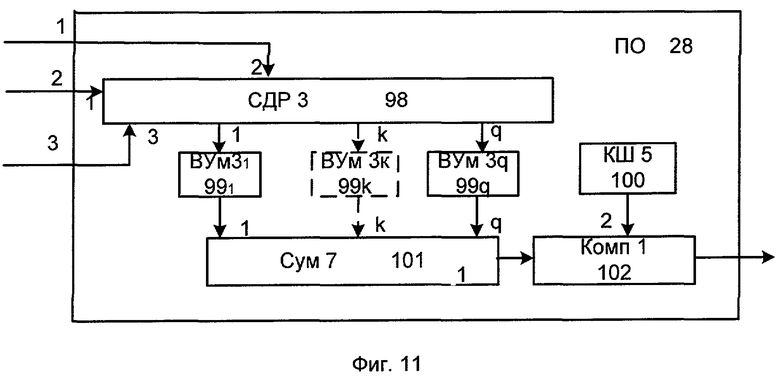
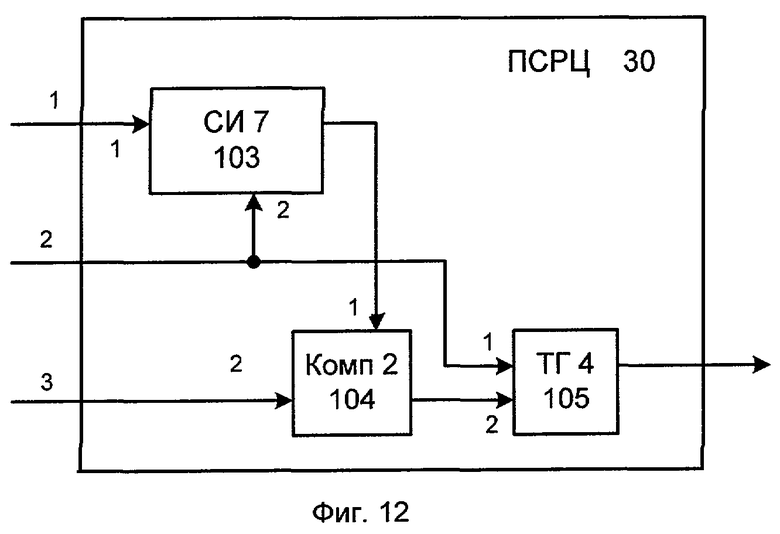
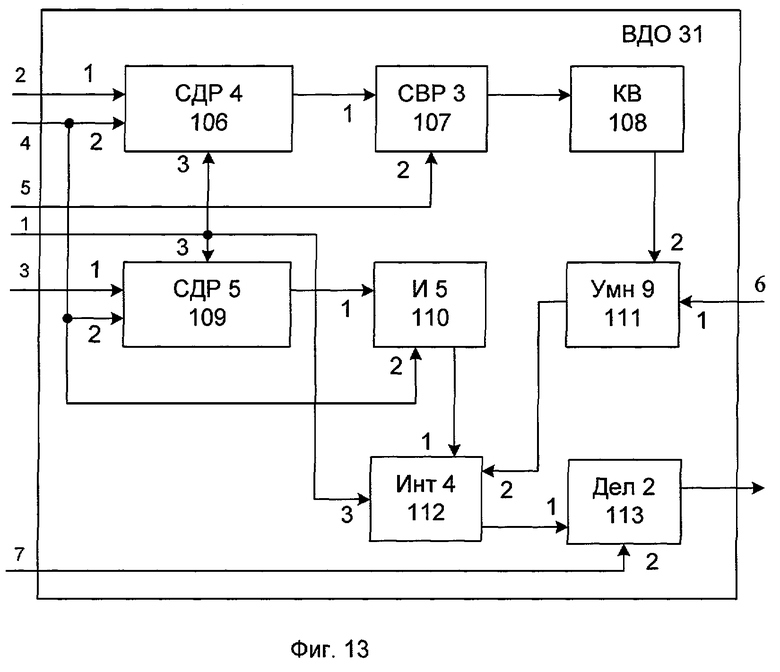
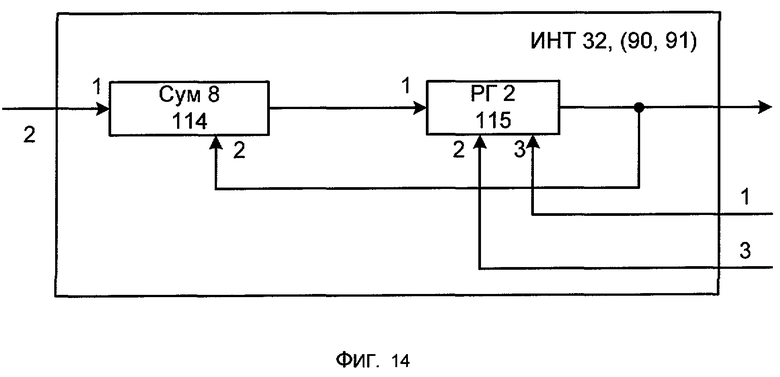



Реферат
(56)Изобретение относится к моноимпульсным когерентным радиолокационным системам, работающим на подвижных носителях, предназначенных для обнаружения сигналов от надводных целей и выдачи их координат в систему управления, в условиях естественных, организованных активных и пассивных помех. Технической результат - повышение достоверности классификации цель/пассивная помеха (за исключением помех типа уголковый отражатель) при углах визирования и дальностях, когда ширина спектра сигнала цели сравнима и даже больше ширины спектра облака дипольных отражателей. Для этого на первом этапе определяют ширину спектра с наиболее мощной спектральной составляющей по заданному уровню из числа составляющих, превысивших первый порог обнаружения (первый критерий), сравнивают полученное значение ширины спектра с заданным вторым пороговым значением, при выполнении превышения ширины спектра второго порогового значения (второй критерий ложной цели) - сигнал, как ложный, отбрасывается из дальнейшего рассмотрения. На втором этапе для разрешаемых сигналов, не забракованных по первому и второму критерию и находящихся на одной дальности, вычисляется дисперсия разности оценок углового положения разрешаемых по частоте элементов, полученных двумя способами: по доплеровскому смещению частоты и моноимпульсным методом. При превышении найденной дисперсии третьего порога (третий критерий) принятый на анализируемой дальности сигнал классифицируется как сигнал помехи и также отбрасывается. 2 н.п.ф-лы, 17 ил.
Референт Г.Э.Лерантович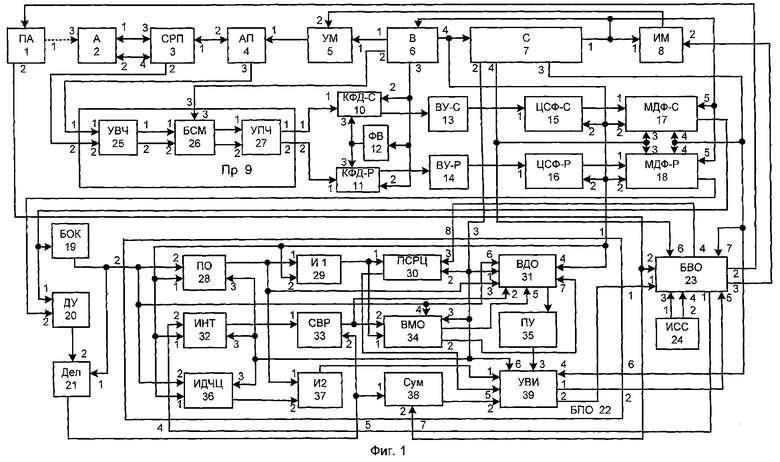
где
λ - длина волны излучаемого сигнала;
FП - частота повторения зондирующих импульсов;
V - скорость ЛА относительно Земли;
β - угол между продольной осью ЛА и РСН антенной системы;
α - угол сноса ЛА.
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| Под ред | |||
| СКОЛНИК М | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Советское радио, 1979, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |

