Изобретение относится к радиотехнике и может быть использовано в средствах радиомониторинга, радиопеленгаторах, а также аналогичных средствах и системах, в которых осуществляется определение направления на источник радиоизлучения (ИРИ) в интересах их последующей локализации, при этом обеспечивая подавление или ограничение шумов и помех.
Наиболее близким по технической сущности и достигаемому техническому результату (прототип) является устройство для определения направлений на ИРИ [1], состоящее из антенной решетки, имеющей K антенных элементов, соединенных через коммутатор с контроллером, обеспечивающим соединение каждого из K антенных элементов через однозначно соответствующий канал пеленгования, число которых равно K, с блоком вычисления ковариационной матрицы, при этом перемножители K пеленгационных каналов соединены с генератором опорных сигналов, блок вычисления ковариационной матрицы имеет первый выход размерности K× K и второй выход размерности 1×K, которые соединены с соответствующими входами блока определения ковариационной матрицы с коррекцией шумов, выход которого соединен с входами блока определения пространственного спектра, выход которого соединен с блоком оценки направления на источники радиоизлучения, при этом контроллер, соединенный также с блоком вычисления ковариационной матрицы, через коммутатор обеспечивает синхронное подключение K антенных элементов к K каналам пеленгования и отключение от них, причем при замкнутой цепи в блоке вычисления ковариационной матрицы обеспечивается вычисление ковариационной матрицы сигналов вместе с собственными шумами каналов пеленгования, при разомкнутой цепи в блоке вычисления ковариационной матрицы обеспечивается определение мощностей собственных шумов каналов пеленгования σ 2 , затем R сигналов блока вычисления ковариационной матрицы вместе с собственными шумами и собственными шумами каналов пеленгования раздельно поступают в блок определения ковариационной матрицы с коррекцией шумов, осуществляемой по правилу Rk=R-βσ2 , где β - величина, характеризующая точность оценки уровня шумов, полученный результат передается в блок вычисления пространственного спектра, полученный спектр передается в блок оценки направлений на источники радиоизлучений, формирующий окончательный результат оценки направления на источники радиоизлучений.
Недостатком является низкая точность определения пеленга на ИРИ при малых отношениях сигнал-шум (ОСШ), обусловленных компенсаций только внутренних шумов пеленгационных каналов мощность которых измерена при запертых их входах без учета суммарной средней мощности совокупности внешних помех суммируемых в пеленгационных каналах с их внутренними шумами.
Техническим результатом изобретения является повышение точности пеленгования ИРИ за счет увеличения ОСШ на входах блока вычисления ковариационной матрицы (БВКМ) путем компенсации аддитивной смеси внутренних шумов пеленгационных каналов и совокупности внешних гауссовых помех на выходах K пеленгационных каналов независимо от наличия полезного сигнала и его уровня и без запирания входов пеленгационных каналов.
Технический результат достигается тем, что в известное устройство, содержащее последовательно соединенные антенную решетку, имеющую K антенных элементов, коммутатор, имеющий K входов и выходов, при этом каждый из K антенных элементов антенной решетки соединен с соответствующим входом коммутатора, K параллельно включенных пеленгационных каналов каждый из которых содержит последовательно соединенные малошумящий усилитель, перемножитель, усилитель промежуточной частоты, аналого-цифровой преобразователь, при этом вход каждого из K параллельно включенных пеленгационных каналов соединен с соответствующим выходом коммутатора, а выходы каждого из K параллельно включенных пеленгационных каналов соединены с соответствующими входами блока вычисления ковариационной матрицы, при этом перемножители k пеленгационных каналов соединены с первым и вторым выходами генератора опорных сигналов, блок вычисления ковариационной матрицы имеет первый выход размерности K×K и второй выход размерности 1×K, которые соединены с соответствующими входами блока определения ковариационной матрицы с коррекцией шумов, выход которого соединен с последовательно соединенными блока вычисления пространственного спектра и блока оценки направления на источник радиоизлучений, контроллер, первый выход которого соединен с управляющим входом коммутатора, а второй выход – с управляющим входом блока вычисления ковариационной матрицы, в которое дополнительно введены в каждый из K параллельно включенных пеленгационных каналов блок оценки и компенсации дисперсии помех, вход которых соединен с выходом соответствующего аналого-цифрового преобразователя, а выход с соответствующим входом блока вычисления ковариационной матрицы, при этом каждый из вновь введенных блок оценки и компенсации дисперсии помех содержит канал компенсации дисперсии помех, включающий последовательно соединенные первый перемножитель, первый накопитель, четвертый перемножитель, второе вычитающее устройство, первый канал автокорреляционной обработки, содержащий последовательно соединенные второй перемножитель, второй накопитель, пятый перемножитель, первое вычитающее устройство, второй канал автокорреляционной обработки, содержащий последовательно соединенные третий перемножитель, третий накопитель, шестой перемножитель, при этом первые входы дополнительно введенных первого, второго и третьего перемножителей объединены и соединены со входом блока оценки и компенсации дисперсии помех, а также вторыми входами первого и второго вновь введенных перемножителей, дополнительно введенная цифровая линия задержки с длительностью задержки определяемой временем корреляции шума в канале приема выход которой соединен со вторым входом третьего перемножителя, а вход с объединенными первыми входами первого, второго, третьего перемножителей и входом блока оценки и компенсации дисперсии помех, при этом второй вход первого вычитающего устройства соединен с выходом шестого перемножителя, а вторые входы четвертого, пятого и шестого перемножителей соединены с объединенным выходом регистра хранения коэффициента усиления, при этом выход первого вычитающего устройства соединен с вторым входом второго вычитающего устройства, выход которого является выходом блока оценки и компенсации дисперсии помех и соединен с соответствующим входом блоком вычисления ковариационной матрицы.
Сущность изобретения заключается в том, что дополнительно введенные в каждый из k параллельно включенных пеленгационных каналов БОКДП, вход которых соединен с выходом соответствующего АЦП, а выход с соответствующим входом БВКМ, обеспечивают измерение средней мощности аддитивной смеси совокупности внешних гауссовых помех и внутренних шумов пеленгационных каналов независимо от наличия сигнала и его уровня на выходе первого ВУ в каждом из вновь введенных БОКДП и компенсацию аддитивной смеси внутренних шумов пеленгационных каналов и совокупности внешних гауссовых помех, что обеспечивает увеличение ОСШ на выходах K пеленгационных каналов, а, следовательно, точность пеленгования повышается, чем и достигается технический результат.
Поэтому введенные согласно изобретению блоки обеспечивают измерение средней мощности совокупности внешних гауссовых помех во входном процесса в виде аддитивной смеси полезного радиосигнала ИРИ и помех и средней мощности внутренних шумов пеленгационных каналов независимо от наличия сигнала и его уровня на основе двухканальной автокорреляционной обработки, при этом на выходе первого канала автокорреляционной обработки формируется напряжение с уровнем, соответствующем суммарной средней мощности аддитивной смеси полезного радиосигнала и аддитивной смеси совокупности внешних гауссовых помех и внутренних шумов пеленгационных каналов, а на выходе второго канала автокорреляционной обработки за счет перемножения, накопления и усреднения входного процесса до и после ЦЛЗ формируется напряжение с уровнем, соответствующем средней мощности одной только сигнальной составляющей вследствие некоррелированности совокупности шумов и помех при их временной задержке на длительность, превышающую время их корреляции.
Таким образом, это позволяет осуществить алгоритмическое вычитание значения средней мощности одной только сигнальной составляющей из уровня, соответствующего суммарной средней мощности аддитивной смеси полезного радиосигнала и аддитивной смеси совокупности внешних гауссовых помех и внутренних шумов пеленгационных каналов. Результатом алгоритмического вычитания на выходе дополнительно введенного первого ВУ будет уровень напряжения, соответствующий средней мощности одной аддитивной смеси совокупности внешних гауссовых помех и внутренних шумов пеленгационных каналов. Это, в свою очередь, позволяет реализовать в канале компенсации дисперсии помех каждого из дополнительно введенного БОКДП компенсацию шумовой (помеховой) составляющей на соответствующих входах БВКМ путем вычитания из уровня напряжения, соответствующего значению корреляционного интеграла на выходе каждого из каналов компенсации дисперсии помех. Это обусловит увеличение ОСШ на выходе каждого из k пеленгационных каналов, а, следовательно, повысит точность пеленгования.
Определение средней мощности шумовой (помеховой) составляющей аддитивной смеси полезного радиосигнала и шума может быть выполнено в соответствии с алгоритмом, изложенным в [2, 3].
Сущность изобретения поясняется рисунками.
На фиг. 1 представлена функциональная схема многоканального пеленгатора с компенсацией помех, на фиг. 2 представлена функциональная схема БОКДП.
Многоканальный пеленгатор с компенсацией помех состоящий из антенной решетки 1, имеющая K антенных элементов, коммутатора 2, K каналов пеленгования 3k, где k=1, …, K, генератора опорного сигнала 4, контроллера 5, блока вычисления ковариационной матрицы 6, блока определения ковариационной матрицы с коррекцией шумов 7, блока вычисления пространственного спектра 8, блока определения направления на источники радиоизлучения 9.
Каждый канал пеленгования 3.k состоит из малошумящего усилителя 3.k.1, перемножителя 3.k.2, усилителя промежуточной частоты 3.k.3, аналого-цифрового преобразователя 3.k.4, блока оценки и компенсации дисперсии помех 3.k.5.
Блок оценки и компенсации дисперсии помех 3.k.5 состоит из первого перемножителя 3.k.5.1, второго перемножителя 3.k.5.2, третьего перемножителя 3.k.5.3, цифровой линии задержки 3.k.5.4, первого накопителя 3.k.5.5, второго накопителя 3.k.5.6, третьего накопителя 3.k.5.7, четвертого перемножителя 3.k.5.8, пятого перемножителя 3.k.5.9, шестого перемножителя 3.k.5.10, регистра хранения коэффициента управления 3.k.5.11, первого вычитающего устройства 3.k.5.12, второго вычитающего устройства 3.k.5.13.
Каждый антенный элемент антенной решетки 1, соединен с коммутатором 2, имеющим K выходов, число которых равно числу антенных элементов, соединенных с входом канала пеленгования 3.k, соответствующему номеру антенного элемента. Выходы каналов пеленгования 3.k соединены с блоком вычисления ковариационной матрицы 6. Блок вычисления ковариационной матрицы 6 имеет два выхода. Первый выход размерности K×K и второй выход размерности 1×K. Выход K×K и выход 1×K соединены с советующими входами блока определения ковариационный матрицы с коррекцией шумов 7. Выход блока определения ковариационной матрицы с коррекцией шумов 7 соединен с входом блока вычисления пространственного спектра 8. Выход блока вычисления пространственного спектра 8 соединен с входом блока определения направлений на источники радиоизлучения 9. Выход контроллера 5 соединен с соответствующим входом коммутатора 2 и с соответствующим входом блока вычисления ковариационной матрицы 6.
Входящие в канал пеленгования 3.k устройства соединены между собой и с внешними устройствами следующим образом. Вход малошумящего усилителя 3.k.1 является входом канала пеленгования 3.k. Выход малошумящего усилителя 3.k.1 соединен с одним из входов перемножителя 3.k.2. Другой вход перемножителя 3.k.2 соединен с выходом генератора опорных сигналов 4. Выход перемножителя 3.k.2, соединен с входом усилителя промежуточной частоты 3.k.3. Выход усилителя промежуточной частоты соединен 3.k.3 с входом аналого-цифрового преобразователя 3.k.4, соединен с входом блока оценки и компенсации дисперсии помех 3.k.5, выход которого подключен к соответствующему входу блока вычисления ковариационной матрицы 6.
Каждый из вновь введенный блок оценки и компенсации дисперсии помех 3.k.5 содержит канал компенсации дисперсии помех, включающий последовательно соединенные первый перемножитель 3.k.5.1, первый накопитель 3.k.5.5, четвертый перемножитель 3.k.5.8, второе вычитающее устройство 3.k.5.13, первый канал автокорреляционной обработки, содержащий последовательно соединенные второй перемножитель 3.k.5.2, второй накопитель 3.k.5.6, пятый перемножитель 3.k.5.9, первое вычитающее устройство 3.k.5.12, второй канал автокорреляционной обработки, содержащий последовательно соединенные третий перемножитель 3.k.5.3, третий накопитель 3.k.5.7, шестой перемножитель 3.k.5.10, при этом первые входы дополнительно введенных первого 3.k.5.1, второго 3.k.5.2 и третьего 3.k.5.3 перемножителей объединены и соединены со входом блока оценки и компенсации дисперсии помех 3.k.5, а также вторыми входами первого 3.k.5.1 и второго 3.k.5.2 перемножителей, цифровой линии задержки 3.k.5.4 с длительностью задержки определяемой временем корреляции шума в канале приема выход которой соединен со вторым входом третьего 3.k.5.3 перемножителя, а вход с объединенными первыми входами первого 3.k.5.1, второго 3.k.5.2, третьего 3.k.5.3 перемножителей и входом блока оценки и компенсации дисперсии помех 3.k.5, при этом второй вход первого вычитающего устройства 3.k.5.12 соединен с выходом шестого перемножителя 3.k.5.10, а вторые входы четвертого 3.k.5.8, пятого 3.k.5.9 и шестого 3.k.5.10 перемножителей соединены с объединенным выходом регистра хранения коэффициента управления 3.k.5.11, при этом выход первого вычитающее устройство 3.k.5.12 соединен со вторым входом второго вычитающего устройства 3.k.5.13, выход которого является выходом блока оценки и компенсации дисперсии помех 3.k.5. и соединен с соответствующим входом блока вычисления ковариационной матрицы 6.
Работа многоканального пеленгатора с компенсацией помех отличается от работы устройства для определения направлений на источники радиоизлучения [1], взятого за прототип, тем, что с началом работы устройства входной процесс в виде аддитивной смеси Xi(t), где i – номер отсчета, принадлежащий интервалу от 1 до L, сигнала, совокупности внешних гауссовых помех ƞ(t) и внутренних шумов n(t) пеленгационных каналов с выхода аналого-цифрового преобразователя 3.k.4 каждого из K пеленгационных каналов в виде совокупности L временных отсчетов Xi(t) поступает на входы соответствующих, дополнительно введенных, блока оценки и компенсации дисперсии помех 3.k.5. В блоке оценки и компенсации дисперсии помех 3.k.5. каждого из K пеленгационных каналов одновременно в первом 3.k.5.1 и втором 3.k.5.2 перемножителях канала компенсации дисперсии помех и первого канала автокорреляционной обработки осуществляется перемножение входной совокупности L временных отсчетов Xi(t) саму на себя. При этом, получая X2i(t) = (si(t) + ni(t) + ƞi(t))2. Одновременно с этим в третьем перемножителе 3.k.5.3 второго автокорреляционного канала обработки осуществляется перемножение совокупности L временных отсчетов Xi(t) аддитивной смеси принимаемого полезного сигнала s(t), внутреннего шума n(t) и аддитивной совокупности внешних гауссовых помех ƞ(t) самих на себя с временной задержкой τ, определяемой длительностью корреляции шумовой (помеховой) составляющей, с выхода цифровой линии задержки 3.k.5.4. Таким образом, на выходе третьего перемножителя 3.k.5.3 формируется произведение Xi(t) ⋅Xi(t- τ) = (si(t) + ni(t) + ƞi(t)) ⋅ (si(t- τ) + ni(t- τ) + ƞi(t- τ)). В накопителях 3.k.5.5, 3.k.5.6 и 3.k.5.7 осуществляется суммирование последовательности отсчетов сформированных на выходах перемножителей 3.k.5.1, 3.k.5.2 и 3.k.5.3 произведений. После чего, с помощью перемножителей 3.k.5.8, 3.k.5.9 и 3.k.5.10 осуществляется оценка скользящего среднего с коэффициентом усреднения 1/L, поступающего одновременно на вторые входы перемножителей 3.k.5.8, 3.k.5.9 и 3.k.5.10 с выхода регистратора коэффициента управления 3.k.5.11. Таким образом, на их выходах формируются отсчеты напряжений с уровнями, соответствующими средней мощности:
- оценке суммарной средней мощности аддитивной смеси полезного сигнала  , внутреннего шума приемника
, внутреннего шума приемника  и аддитивной совокупности внешних гауссовых помех
и аддитивной совокупности внешних гауссовых помех
 на выходах канала компенсации дисперсии помех и первого канала автокорреляционной обработки;
на выходах канала компенсации дисперсии помех и первого канала автокорреляционной обработки;
- оценке средней мощности полезного сигнала  на выходе второго канала автокорреляционной обработки.
на выходе второго канала автокорреляционной обработки.
После этого с выходов пятого 3.k.5.9 и шестого 3.k.5.10 перемножителей отсчеты с уровнями  и
и  соответственно, одновременно поступают на первый и второй входы первого вычитающего устройства 3.k.5.12, на выходе которого формируется отсчет с уровнем равным оценке суммарной средней мощности внутреннего шума приемника и аддитивной совокупности внешних гауссовых помех
соответственно, одновременно поступают на первый и второй входы первого вычитающего устройства 3.k.5.12, на выходе которого формируется отсчет с уровнем равным оценке суммарной средней мощности внутреннего шума приемника и аддитивной совокупности внешних гауссовых помех  :
:
С выхода первого вычитающего устройства 3.k.5.12 отсчет с уровнем равным  подается на второй вход второго вычитающего устройства 3.k.5.13, где осуществляется алгоритмическое вычитание из уровня, равного оценке суммарной средней мощности аддитивной смеси полезного сигнала , внутреннего шума приемника и аддитивной совокупности внешних гауссовых помех
подается на второй вход второго вычитающего устройства 3.k.5.13, где осуществляется алгоритмическое вычитание из уровня, равного оценке суммарной средней мощности аддитивной смеси полезного сигнала , внутреннего шума приемника и аддитивной совокупности внешних гауссовых помех  уровня, равного оценке суммарной средней мощности внутреннего шума приемника и аддитивной совокупности внешних гауссовых помех
уровня, равного оценке суммарной средней мощности внутреннего шума приемника и аддитивной совокупности внешних гауссовых помех 
 :
:
Таким образом, на входах блока вычисления ковариационной матрицы повышается отношение сигнал-шум, а, следовательно, повышается точность пеленгования источника радиоизлучения, чем и достигается заявленный технический результат.
Источники информации
Патент № 2631944 Российская Федерация, МПК G01S 5/04. Устройство для определения направлений на источники радиоизлучения: № 2016129100: заявл. 15.07.2016: опубл. 29.09.2018 / Маркин В.Г., Журавлев А.В., Безмага В.М., Красов Е.М., Смолин А.В., Шуваев В.А., Поветко П.В.; заявитель ОАО НВП «ПРОТЕК». – 10 с.: ил. – Текст: непосредственный.
Одновременное измерение мощности сигнала и мощности шума (помехи) в полосе пропускания основного канала радиоприема. Бубеньщиков А.А., Владимиров В.И., Бубеньщиков А.В., Сиденко С.В. Информационно-измерительные и управляющие системы (журнал), №7, 2012. с. 67-73.0.
Синтез инвариантного к наличию сигнала алгоритма оценивания средней мощности гауссовой помехи неизвестной интенсивности. Бубеньщиков А.А., Болдырев А.А., Ключникова И.Д. Электросвязь (журнал), №8, 2020, с. 39-44.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиопеленгатор с компенсацией помех | 2024 |
|
RU2825420C1 |
| Устройство для определения направлений на источники радиоизлучения | 2016 |
|
RU2631944C1 |
| Радиолиния с автоматической регулировкой параметров спектра с компенсацией помех | 2024 |
|
RU2826550C1 |
| ЦИФРОВОЙ ОЦЕНОЧНО-КОРРЕЛЯЦИОННЫЙ КОМПЕНСАЦИОННЫЙ ОБНАРУЖИТЕЛЬ | 2014 |
|
RU2575481C1 |
| Способ адаптивного пространственно-многоканального обнаружения и пеленгования двух частотно-неразделимых источников радиоизлучения | 2020 |
|
RU2732504C1 |
| Обнаружитель сигналов управления беспилотного летательного аппарата с акустическим каналом пеленгования | 2024 |
|
RU2836857C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВИДА МОДУЛЯЦИИ | 2022 |
|
RU2796588C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| ОЦЕНОЧНО-КОРРЕЛЯЦИОННЫЙ КОМПЕНСАЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛА | 2013 |
|
RU2537849C1 |
Изобретение относится к радиотехнике. Технический результат – повышение точности пеленгования источников радиоизлучений за счет увеличения отношения сигнал-шум на входах блока вычисления ковариационной матрицы путем компенсации не только внутренних шумов пеленгационных каналов, но и совокупности внешних гауссовых помех на выходах пеленгационных каналов независимо от наличия полезного сигнала и его уровня. Такой результат обеспечивается за счет того, что многоканальный пеленгатор дополнительно содержит в каждом из K параллельно включенных пеленгационных каналов блок оценки и компенсации дисперсии помех, вход которых соединен с выходом соответствующего аналого-цифрового преобразователя, а выход с соответствующим входом блока вычисления ковариационной матрицы. 2 ил.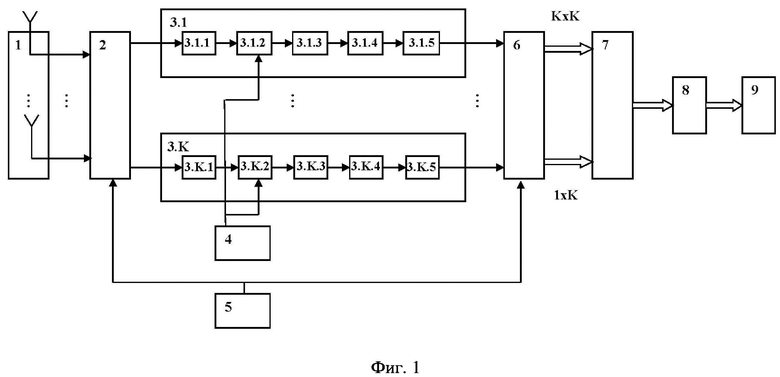
Многоканальный пеленгатор с компенсацией помех содержит последовательно соединенные антенную решетку, имеющую K антенных элементов, коммутатор, имеющий K входов и выходов, при этом каждый из K антенных элементов антенной решетки соединен с соответствующим входом коммутатора, K параллельно включенных пеленгационных каналов, каждый из которых содержит последовательно соединенные малошумящий усилитель, перемножитель, усилитель промежуточной частоты, аналого-цифровой преобразователь, при этом вход каждого из K параллельно включенных пеленгационных каналов соединен с соответствующим выходом коммутатора, а выходы каждого из K параллельно включенных пеленгационных каналов соединены с соответствующими входами блока вычисления ковариационной матрицы, при этом перемножители k пеленгационных каналов соединены с первым и вторым выходами генератора опорных сигналов, блок вычисления ковариационной матрицы имеет первый выход размерности K×K и второй выход размерности 1×K, которые соединены с соответствующими входами блока определения ковариационной матрицы с коррекцией шумов, выход которого соединен с последовательно соединенными блока вычисления пространственного спектра и блока оценки направления на источник радиоизлучений, контроллер, первый выход которого соединен с управляющим входом коммутатора, а второй выход – с управляющим входом блока вычисления ковариационной матрицы, отличающийся тем, что дополнительно введены в каждый из K параллельно включенных пеленгационных каналов блока оценки и компенсации дисперсии помех, вход которых соединен с выходом соответствующего аналого-цифрового преобразователя, а выход с соответствующим входом блока вычисления ковариационной матрицы, при этом каждый из вновь введенных блока оценки и компенсации дисперсии помех содержит канал компенсации дисперсии помех, включающий последовательно соединенные первый перемножитель, первый накопитель, четвертый перемножитель, второе вычитающее устройство, первый канал автокорреляционной обработки, содержащий последовательно соединенные второй перемножитель, второй накопитель, пятый перемножитель, первое вычитающее устройство, второй канал автокорреляционной обработки, содержащий последовательно соединенные третий перемножитель, третий накопитель, шестой перемножитель, при этом первые входы дополнительно введенных первого, второго и третьего перемножителей объединены и соединены со входом блока оценки и компенсации дисперсии помех, а также вторыми входами первого и второго вновь введенных перемножителей, дополнительно введенная цифровая линия задержки с длительностью задержки определяемой временем корреляции шума в канале приема, выход которой соединен со вторым входом третьего перемножителя, а вход с объединенными первыми входами первого, второго, третьего перемножителей и входом блока оценки и компенсации дисперсии помех, при этом второй вход первого вычитающего устройства соединен с выходом шестого перемножителя, а вторые входы четвертого, пятого и шестого перемножителей соединены с объединенным выходом регистра хранения коэффициента усиления, при этом выход первого вычитающего устройства соединен со вторым входом второго вычитающего устройства, выход которого является выходом блока оценки и компенсации дисперсии помех и соединен с соответствующим входом блоком вычисления ковариационной матрицы.
| Устройство для определения направлений на источники радиоизлучения | 2016 |
|
RU2631944C1 |
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ ЗНАЧЕНИЙ АМПЛИТУД СИГНАЛА И ПОМЕХИ | 2011 |
|
RU2485525C2 |
| СПОСОБ УСТРАНЕНИЯ ПРОСТРАНСТВЕННЫХ ПОМЕХ | 2014 |
|
RU2575973C1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
| US 6598009 B2, 22.07.2003 | |||
| US 9094253 B2, 28.07.2015. | |||

