Изобретение относится к космической технике в области высокоточного динамичного управления движением космических аппаратов (КА), осуществляющих в частности, дистанционное зондирование Земли.
Уровень техники
Управлением движения КА для ДЗЗ обеспечивается выполнение следующих задач:
• получение нужной траектории КА (управление движением центра масс);
• управление ориентацией, то есть получение нужного положения корпуса КА относительно внешних ориентиров (управление вращательным движением КА вокруг центра масс).
После вывода КА на орбиту управление движением центра масс КА осуществляют эпизодически в течение коротких интервалов времени для коррекции орбиты. Для управления движением центра масс используют реактивные двигательные установки, в составе которых присутствует рабочее тело, расходуемое в процессе эксплуатации. При этом управление угловым положением с целью ориентации приборов КА на изучаемые объекты становится главным режимом полета (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 10-11), поэтому важнейшей задачей современной космической техники является совершенствование системы ориентации, позволяющей определить с высокой точностью направления осей КА относительно осей некоторой системы координат, т.е. угловое положение КА, а также его угловую скорость. Наряду с высокой точностью исполнительных органов, формирующих механическое воздействие на корпус КА, в системе ориентации КА необходимо обеспечивать высокую точность определения положения КА в пространстве. По точности, среди известных различных способов определения положения КА в пространстве (с использованием измерений относительно небесных светил: Солнца, Земли, звезд), а именно, солнечных датчиков, датчиков ИК-вертикали, магнитометров, звездных датчиков (ЗД) и т.д., предпочтение отдается звездным датчикам (см. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974).
Анализируя альтернативные варианты применительно к исполнительным органам, рассмотрим наиболее известную систему - систему с газореактивными соплами или микрореактивными двигателями. Эти исполнительные органы, отбрасывая холодный или горячий газ через сопло в космическое пространство, создают силу, воздействующую на корпус КА, а поскольку запасы рабочего газа ограничены и не восполняются, то постоянное использование данной системы для длительного полета КА на сегодня становится нецелесообразным.
Системам, использующим гравитационные поля, аэродинамическое давление, силы солнечной радиации, характерна лишь функция стабилизации КА в одном базовом положении: по местной вертикали - у гравитационных систем; в направлении вектора скорости полета - у аэродинамических систем и, наконец, в направлении на Солнце - у систем с «солнечными парусами». Эти системы, хотя и обладают принципиальной возможностью выполнения иных функций (предварительного успокоения, пространственных разворотов и т.д.), тем не менее никогда для этого не используются в виду явной нецелесообразности из-за чрезмерного их усложнения (см. Гущин В.Н. Системы ориентации и стабилизации // Основы устройства космических аппаратов: Учебник для вузов. - М.: Машиностроение, 2003. - С. 241-257, 272 с.).
В настоящее время широкое распространение получили системы ориентации с использованием двигателей-маховиков и силовых гироскопов - гиродинов (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 58-60), которые являются одной из основных бортовых систем КА, обеспечивающих определенное положение корпуса КА в пространстве. Двигатели-маховики или гиродины устанавливаются на корпусе КА и являются исполнительными органами, обеспечивающими вращательное движение КА вокруг центра масс по рысканью, крену и тангажу (см., например, А. Г. Иосифьян, Электромеханика в космосе. «Космонавтика, астрономия» №3, 1977 г, стр. 20).
Принцип работы исполнительных органов основан на законе сохранения суммарного кинетического момента "КА - исполнительные органы". Например, когда двигатель-маховик раскручивается в одну сторону, то КА, соответственно, начинает вращаться в противоположную. Если под влиянием внешних факторов КА начал разворачиваться в определенном направлении, достаточно увеличить скорость вращения маховика в ту же сторону, чтобы он скомпенсировал момент («принял вращение на себя») и нежелательный поворот КА прекратится.
В отличие от двигателей-маховиков гиродины имеют более сложную конструкцию и систему управления, имеют большие размеры и массу, требуют длительной и плавной раскрутки ротора. Они применяются тогда, когда необходим большой управляющий момент и используются в основных режимах ориентации КА:
• переориентация на цель;
• стабилизация в заданной базовой системе координат;
• программные развороты.
В настоящее время гиродины являются основными исполнительными органами систем ориентации современных высокоманевренных космических аппаратов с длительным сроком активного существования (см. статью размещенную в интернете Акашев Д.И., Якимовский Д.О., Яковец О.Б. Силовые гироскопические комплексы для малых космических аппаратов. ФГУП «НИИ командных приборов»).
Однако системы, с данными исполнительными органами (двигателями-маховиками или гиродинами), не могут управлять величиной общего кинетического момента инерционной механической системы «корпус КА - исполнительный орган», поскольку не способны создавать внешние к КА моменты. Они способны парировать внешние воздействия до определенного момента (например, до насыщения) путем перевода полученного корпусом КА кинетического момент «внутрь». Поэтому требуется сброс кинетического момента, накапливаемого КА из-за внешних воздействий на него (см., например, А.Г. Иосифьян, Электромеханика в космосе. «Космонавтика, астрономия» №3, 1977 г, стр. 20).
Внешние воздействия на КА - это силы аэродинамического сопротивления, светового давления, гравитационные силы, воздействия метеорной пыли, магнитные и плазменные воздействия или другие внешние силы.
Наиболее эффективной для этих целей является магнитная система, превосходящая различные гравитационные устройства, которые в сравнении с ней имеют недостатки:
• достаточно большие масса и габариты, увеличивающиеся с увеличением максимального момента и крутизны моментной характеристики гравитационных устройств;
• низкая крутизна моментной характеристики гравитационной системы, обеспечивающая невысокую точность при возмущающих моментах;
• гравитационные устройства требуют применение дорогостоящих технологических процессов и уникальных сложных механических устройств, приводящих к снижению надежности работы системы управления движением КА. Магнитная система включает в себя магнитные исполнительные органы (в космической технике используются электромагниты, постоянные магниты, катушки индуктивности с током, сверхпроводящие магниты), формирующие магнитные моменты, которые взаимодействуя с геомагнитным полем Земли создают управляющие механические моменты на КА (за исключением того, что не могут создавать управляющий момент относительно направления, совпадающего с вектором индукции магнитного поля Земли, и независимые моменты одновременно относительно всех осей управления). Данные управляющие механические моменты позволяют обеспечивать предварительное успокоение КА, т.е. гашение начальной угловой скорости КА, приобретенной в результате отделения его от ракеты-носителя или разгонного блока и сброс кинетических моментов (см. патент, РФ, №2625687), при этом они имеют неоспоримые достоинства в том, что совсем не потребляют рабочего тела (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 9).
Такой способ управления движением КА с управляемой ориентацией осуществляется в способе управления космическим аппаратом дистанционного зондирования Земли по патенту, РФ, №2722598, взятому за прототип.
В прототипе обеспечивают положительный энергобаланс источника питания солнечными батареями, обеспечивают ориентацию космического аппарата на заданной орбите с использованием бесплатформенного инерциального блока с блоком звездных датчиков, используют исполнительные органы, создающие крутящий момент, и электромагнитную систему управления, формирующих механические моменты воздействия на корпус космического аппарата для его управления и сброса кинетического момента.
В качестве исполнительных органов в устройстве прототипа используют двигатели-маховики или гиродины (двухступенчатые управляющие гироскопы), а также электромагнитную систему управления, не требующей запасов рабочего тела. Успокоение и последующую стабилизацию КА после отделения его от ракеты или разгонного блока осуществляют управляющими механическими моментами Мх, Му, Mz по осям управления КА (X, Y, Z), получаемыми в результате взаимодействия генерируемых электромагнитной системой управления магнитных моментов относительно координатных осей КА - Lx, Ly, Lz с векторами магнитной индукции магнитного поля Земли Вх, Ву, Bz в соответствии с формулой (1).

где L - вектор создаваемого магнитного момента электромагнитными устройствами;
В - вектор магнитной индукции магнитного поля Земли. Однако при проведении успокоения с последующей стабилизацией КА только с помощью электромагнитной системы управления присутствуют следующие недостатки:
• процесс успокоения с последующей стабилизацией КА осуществляется в течение длительного времени в виду ограниченных по массе и габаритам электромагнитов в электромагнитной системе управления (так, например, в КА «Метеор-М» с общей массой около 3000 кг, в электромагнитной системе управления, поставляемой заявителем данного изобретения АО «НИИЭМ», присутствуют электромагниты, создающие достаточно большой магнитный момент - 400 А⋅м2, обеспечивают успокоение КА в течении времени 5÷5,5 часов на средней высоте 832,2 км и периодом обращения 101,3 мин при начальной угловой скорости после отстыковки от разгонного блока «Фрегат» 3°/с);
• процесс успокоения КА не позволяет осуществить ориентацию солнечных батарей на Солнце и в течение данного длительного времени питание осуществляется от аккумуляторной батареи источника питания без возможности подзарядки их от солнечных батарей;
• в целях экономии расхода остаточной емкости аккумуляторных батарей (под остаточной емкостью аккумулятора следует понимать значение количества электрической энергии, выраженное в ампер часах или Кулонах, которое аккумулятор отдает при разряде до выбранного конечного напряжения в любом текущем его состоянии), питание устройств КА в течение всего времени процесса ограничено и питается в основном электромагнитная система управления с устройствами, обеспечивающими ее работоспособность, что снижает эффективность работы системы управления движением космического аппарата;
• требуется достаточный запас остаточной емкости аккумуляторных батарей для процесса успокоения КА, приводящий к увеличению их массы и габаритов, а также снижению надежности источника питания КА;
• снижается надежность и даже возможна потеря КА при полном расходовании остаточной емкости аккумуляторных батарей источника питания КА.
Кроме того, при использовании в качестве исполнительных органов блока гиродинов требуется длительная и плавная раскрутка их роторов. Это связано с конструктивными особенностями гиродина, у которого массивный ротор раскручивает двигатель с небольшими массой и габаритами, обладающий, в соответствии с этим, небольшим динамическим моментом. Так, например, раскрутка ротора у гиродина СГК-100 с кинетический моментом 60 Н⋅м⋅с, производимого в НИИ командных приборов, г. Санкт-Петербург, может достигать по времени до 180 мин, что приводит к следующим недостаткам:
• в процессе раскрутки роторов блока гиродинов возникают "паразитные" угловые скорости КА, из-за того, что электромагнитная система управления не может эффективно их парировать и стабилизировать КА, в виду возможной недостаточности или полного отсутствия создаваемых механических моментов. Это связано с тем, что в процессе полета КА механический момент, создаваемый в результате взаимодействия векторов магнитного момента электромагнитной системы управления и геомагнитного поля Земли изменяется от максимального значения при перпендикулярном их расположении относительно друг друга до нулевого при параллельном их расположении относительно друг друга (см. патент, РФ, №2625687). В результате не обеспечивается оптимальное направление солнечных батарей на Солнце и снижается зарядный ток аккумуляторной батареи;
• требуется аккумуляторная батарея с большим запасом остаточной емкости для поддержания достаточного по энергии электропитания в течение всего времени раскрутки роторов блока гиродинов.
С учетом требуемых больших запасов остаточной емкости аккумуляторной батареи источника питания для процесса успокоения КА и для поддержания достаточного по энергии электропитания в течение всего времени раскрутки роторов блока гиродинов, в дальнейшем в штатном режиме полета КА, который в основном и определяет срок активного существования КА, выдвигаются требования к солнечным батареям, которые должны соответствовать по массе и габаритам, обеспечивающими оптимальные зарядные токи аккумуляторной батареи (см. патент, РФ, №2510105), в результате чего будут получены невысокие удельные энергетические (мощностные) характеристики (отношение мощности, вырабатываемой источником питания КА, к его массе) источника питания (см. патент, РФ, №2488911) и надежность КА.
Следует отметить, что в штатном режиме полета КА заряд аккумуляторной батареи осуществляется на полетных "световых" интервалах орбиты, составляющих для КА дистанционного зондирования Земли приблизительно (45-50) минут, в виду того, что длительность одного витка орбиты КА дистанционного зондирования Земли составляет приблизительно (90-100) минут, и тогда теневой участок орбиты, на котором питание КА осуществляется только от аккумуляторной батареи, составляет приблизительно (45-50) минут.
Целью предлагаемого изобретения является повышение эффективности и надежности управления движением космического аппарата с управляемой ориентацией.
Раскрытие изобретения
Поставленную цель достигают благодаря техническому обеспечению сочетанного использования электромагнитной системы управления и блока реактивных двигателей с несущественной массой рабочего тела для успокоения и стабилизации КА, поддержанию достаточного энергообеспечения в течение всего времени раскрутки роторов блока гиродинов, парированию "паразитных" угловых скоростей, возникающих при раскрутке роторов в блоке гиродинов, достижению значения емкости аккумуляторной батареи источника питания КА до оптимальных значений энергообеспечения штатного режима КА на орбите.
Предлагаемый способ управления движением космического аппарата с управляемой ориентацией заключается в том, что обеспечивают положительный энергобаланс источника питания солнечными батареями, ориентируют космический аппарат на заданной орбите с использованием бесплатформенного инерциального блока с блоком звездных датчиков, используют исполнительные органы, создающие крутящий момент, и электромагнитную систему управления, формирующих механические моменты воздействия на корпус космического аппарата для его управления и сброса кинетического момента.
Сущность изобретения заключается в том, что на корпусе КА устанавливают блок реактивных двигателей ориентации, включающий в себя силовой блок реактивных двигателей, соединенный с резервуаром, содержащим несущественную массу рабочего тела, и блок управления резервуаром с рабочим телом и силовым блоком реактивных двигателей, достигают значений зарядной емкости аккумуляторной батареи источника питания КА до оптимальных значений энергообеспечения штатного режима КА на орбите.
В результате введения новых признаков обеспечивается высокая эффективность и надежность работы системы ориентации КА, которая достигается путем сочетанного использования электромагнитной системы управления и блока реактивных двигателей ориентации, обеспечивающих сокращение времени процесса успокоения и стабилизации КА, парирования "паразитных" угловых скоростей КА и обеспечение ориентацию солнечных батарей на Солнце для получения максимального притока электроэнергии при раскрутке роторов в блоке гиродинов, а также увеличения удельных энергетических характеристик источника питания, содержащего аккумуляторную и солнечные батареи.
Графические иллюстрации
Изобретение проиллюстрировано графическими фигурами фиг. 1 и фиг. 2.
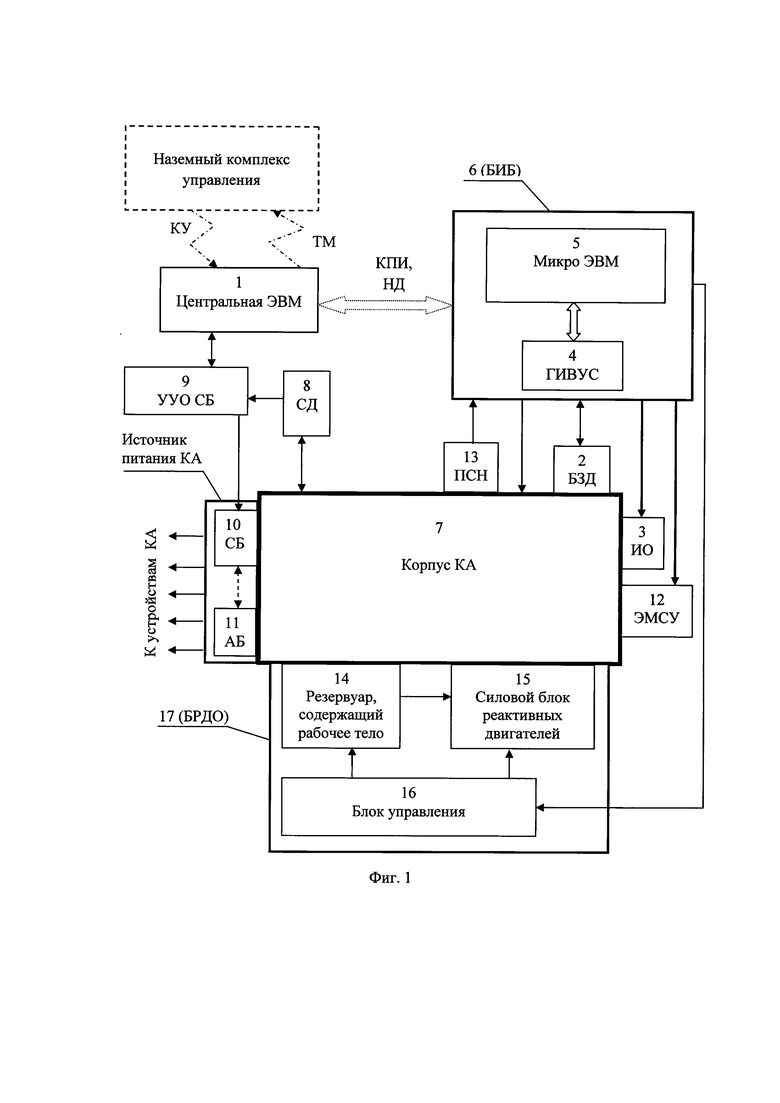
На приведенной графической фигуре фиг. 1 приведен пример исполнения в виде структурной схемы для реализации заявляемого способа управления движением космического аппарата с управляемой ориентацией, содержащей составляющие, обозначенные позициями:
- Центральная ЭВМ (электронно-вычислительное устройство) - 1;
- БЗД (блок звездных датчиков) - 2;
- ИО (блок гиродинов или блок двигателей-маховиков) - 3;
- ГИВУС (гироскопический измеритель вектора угловой скорости КА) - 4;
- Микро ЭВМ - 5;
- БИБ (бесплатформенный инерциальный блок) - 6;
- Корпус КА - 7;
- СД (солнечный датчик) - 8;
- УУО СБ (устройство управления ориентацией солнечных батарей) - 9;
- СБ (солнечные батареи) - 10;
- АБ - (аккумуляторная батарея) - 11;
- ЭМСУ (электромагнитное устройство управления) - 12;
- ПСН (приемник спутниковой навигации GPS или ГЛОНАСС) - 13;
- Резервуар, содержащий несущественную массу рабочего тела - 14;
- Силовой блок реактивных двигателей - 15;
- Блок управления - 16;
- БРДО (блок реактивных двигателей ориентации) - 17.
На графической фиг. 2 приведен пример расположения четырех гиродинов избыточной системы в блоке гиродинов ИО 3.
Описание примера исполнения
С помощью источника питания КА, в состав которого входят солнечные батареи СБ 10 и аккумуляторная батарея АБ 11, обеспечивают электропитание всех устройств КА (см. например, патент, РФ, №2724111).
Практически во всех новых проектах в качестве СБ 10 сегодня применяют трехкаскадные фотоэлектрические преобразователи на основе арсенида галлия (см. Электронный журнал «Труды МАИ». Выпуск №60), имеющие срок активного существования более 10 лет.
АБ 11 осуществляет питание устройств КА в основном на теневых участках, возникающих в связи с периодическим прохождением КА теневых участков орбиты, затененных от Солнца Землей или участков, частично затененных от Солнца Луной, а также в аварийных режимах в момент потери ориентации на Солнце и в нештатных режимах - при недостатке или отсутствии мощности солнечной батареи для питания всех подключенных потребителей, например при включении пиковых нагрузок, при маневрах КА для коррекции орбиты, при входах и выходах КА из теневых участков орбиты. При этом, в качестве аккумуляторных батарей целесообразно использовать АБ на основе Лития (литий-ионные или литий-полимерные АБ), которые по сравнению с другими типами аккумуляторов (например, никель-водородных, никель-кадмиевых, никель-металлогидридных) обладают значительными преимуществами по своим удельным энергетическим характеристикам (превышают их в 2-3 раза), большим напряжением на элементе, малым саморазрядом, очень хорошим временем эксплуатации и экологической чистотой, а также простотой режима заряда и эксплуатации.
Между Центральной ЭВМ 1 и ЭВМ 5 осуществляется обмен командно-программной информацией (КПИ), навигационными данными (НД).
Телеметрические информационные сигналы с центральной ЭВМ 1 передаются в наземный комплекс управления по телеметрии (ТМ), а из наземного комплекса управления в центральную ЭВМ 1 - команды управления (КУ).
При отделении КА от ракеты или разгонного блока осуществляется процесс успокоения, затем процесс приведения (совмещение осей связанной системы координат КА с осями орбитальной системы координат) и последующая стабилизация КА. После успокоения и последующей стабилизации КА устанавливают штатный режим КА на орбите, который подразделяется на дежурный режим и режим целевой работы КА. Описание ориентации КА на заданной орбите с высокой точностью и надежностью в штатном режиме с использованием блока звездных датчиков БЗД 2 и бесплатформенного инерциального блока БИБ 6, содержащего микроЭВМ 5 и гироскопический измеритель вектора угловой скорости КА ГИВУС 4 (например, как в прототипе, содержащий блок датчиков угловых скоростей, устройство коррекции ошибки, датчики ориентации, синхронизирующее координатно-временное устройство), с использованием исполнительных органов ИО 3, создающих крутящий момент, и электромагнитной системы управления ЭСМУ 12, формирующих механические моменты воздействия на корпус КА 7 для его управления и сброса кинетического момента, подробно приведено в прототипе и патенте РФ, №2669481, в которых также указаны исполнения составляющих. Для измерения параметров орбиты КА используют систему GPS или ГЛОНАСС в виде приемника спутниковой навигации GPS или ГЛОНАСС ПСН 13, (см. "Вестник ГЛОНАСС" №3 (19)-2014), информация которого поступает в микроЭВМ 5. Спутники системы GPS или ГЛОНАСС передают периодически уточняемые эфемериды - набор координат, которые определяют положение КА на орбите в различные моменты времени. Под влиянием гравитационного поля Земли и других факторов параметры исходных координат спутниковых систем изменяются и поэтому постоянно уточняются.
Вначале процесса успокоения автоматически запускается режим начального демпфирования, предназначенный для снижения кинетического момента (гашение начальных угловых скоростей) КА, возникающего при отделении, и стабилизации КА относительно произвольной инерциальной системы координат, определяемой на момент отделения, то есть обнуления начального кинетического момента КА. В ближнем космосе присутствует действие геомагнитного поля Земли (присутствует приблизительно до высоты приблизительно 9000 км), позволяющее использовать его для создания магнитными системами КА внешние управляющие механические воздействия на КА, поэтому успокоение и последующую стабилизацию КА после отделения его от ракеты или разгонного блока можно осуществить управляющими механическими моментами Мх, Му, Mz по осям управления КА (X, Y, Z), получаемыми в результате взаимодействия генерируемых электромагнитной системой управления ЭМСУ 12 магнитных моментов относительно координатных осей КА - Lx, Ly, Lz с векторами магнитной индукции магнитного поля Земли Вх, Ву, Bz в соответствии с формулой (1).
В проекциях на оси управления КА выражение (1) принимает вид:
(см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 21-22).
В качестве магнитных исполнительных органов ЭМСУ 12 можно использовать, например, электромагниты стержневого типа с сердечником из магнитно-мягкого материала с обмотками из медного провода (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 178).
В качестве датчиков компонент геомагнитной индукции в ЭМСУ 12 можно использовать трехмерный магнитометр, например, магнитометр цифровой трехкомпонентный МЦТ-11 разработки АО «Раменское приборостроительное конструкторское бюро», который вырабатывает сигналы компонент магнитной индукции Вх, Ву, Bz. С целью повышения надежности и живучести электромагнитной системы управления ЭМСУ 12 (см. например, патент, РФ, №2625687) устройство формирования механического момента электромагнитом в ней выполняют по схеме резервирования (см. например, патент, РФ, №2672316).
Как было показано выше, процесс успокоения КА с помощью ЭМСУ 12 достаточно длительный и составляет, для приведенного в качестве примера КА «Метеор-М», 5÷5,5 часов. При этом в данном режиме питание КА осуществляется от аккумуляторной батареи АБ 11, что может приводить к условию существенного увеличения ее емкости в сравнении с требуемой емкостью основного штатного режима работы КА на орбите, длительность которого составляет годы в отличие от длительности времени успокоения КА, составляющей часы. Условия обеспечения энергоснабжением штатного режима, длительность которого для современных КА превышает 5 лет, являются исходными для достижения требуемого срока активного существования источника питания КА (более 5 лет). Очевидно, что при выборе емкости АБ 11 штатного режима (с учетом запаса по остаточной емкости, их деградации, а также с учетом для них максимальной пиковой нагрузки) следует исходить из того, что период обращения КА (например, КА дистанционного зондирования Земли) составляет приблизительно 100 мин и до 50% времени (до 50 мин) питание должно осуществляться только от аккумуляторных батарей АБ 11 источника питания КА (при входе, выходе и нахождении на теневой стороне Земли).
Требуемая остаточная емкость аккумуляторной батареи АБ 11 для процесса успокоения КА (которая может существенно превышать относительно требуемой остаточной емкости штатного режима), приводит к увеличению ее массы и габаритов, получению невысокой удельной мощности источника питания КА, а также к снижению надежности источника питания КА.
Для космической техники важнейшей тактико-технической характеристикой системы электропитания, составляющей более 25% массы, объема и стоимости К А, является удельная мощность, т.е. отношение мощности, вырабатываемой системой электропитания, к ее массе (см. патент, РФ №2689401). При этом, в системе электропитания энергообеспечение КА осуществляется от солнечной батареи СБ 10 и аккумуляторной батареи АБ 11 на освещенной орбите и только от аккумуляторной батареи АБ 11, являющейся одним из наиболее критичных звеньев системы электропитания, на теневых участках орбиты. Очевидно, что рациональным выбором солнечных и аккумуляторных батарей для штатного режима (по времени более 5 лет), практически представляющего по времени срок активного существования КА, является выбор, при котором процесс успокоения и последующая стабилизация КА обеспечивается характеристиками солнечных и аккумуляторных батарей для штатного режима (длительность процесса успокоения и последующей стабилизации КА в сравнении с длительностью штатного режима является несущественным и ею можно пренебречь),
Для сокращения времени процесса успокоения и стабилизации (в том числе, при раскрытии солнечных батарей) КА в предлагаемом способе осуществляют посредством сочетанных воздействий на корпус КА 7:
• механических от ЭМСУ 12;
• реактивных, базирующихся на законе сохранения момента количества движения тел, от блока реактивных двигателей ориентации БРДО 17, создающих реактивные силы.
В качестве реактивных двигателей в блоке реактивных двигателей ориентации с несущественной массой рабочего тела БРДО 17 целесообразно использовать, например, однокомпонентные или жидкостные реактивные двигатели (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 47-49). Блок реактивных двигателей ориентации БРДО 17 имеет в своем составе силовой блок реактивных двигателей 15 (см. например, патент, РФ, №2096647), резервуар, содержащий несущественную массу рабочего тела 14 (возможно использование маломассогабаритного резервуара), и блок управления 16, формирующий импульсный режим работы путем управления по сигналам с микро ЭВМ 5 подачей рабочего тела из резервуара, содержащего несущественную массу рабочего тела 14 (например, управление клапанами), в силовой блок реактивных двигателей 15. Пример схемы расположения силового блока реактивных двигателей 15 на корпусе КА 7 смотри в книге Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. «Наука», М., 1974, стр. 111-113.
Характерной особенностью реактивных двигателей ориентации является их большое быстродействие и способность создания значительных крутящих моментов (см. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974, стр. 168; сайт: https://ru.wikipedia.org/wiki Двигательная установка космического аппарата), которые при рациональном выборе скорости истечения и массового расхода рабочего тела, превышают крутящие моменты электромагнитной системы управления для одной и той же размерности КА более чем в 1000 раз, поэтому в режиме успокоения при сочетанных воздействиях на корпус КА 7 механических от ЭМСУ 12 и реактивных от БРДО 17 реактивные двигатели ориентации БРДО 17 играют основную роль для снижения времени успокоения.
В результате данных сочетанных воздействий на корпус КА 7 механических от ЭМСУ 12 и реактивных от БРДО 17:
• существенно сокращают время процесса успокоения и стабилизации КА (время процесса приблизительно не более 1 минуты);
• существенно снижают требуемое значение емкости аккумуляторной батареи;
• обеспечивают оптимальный выбор солнечных и аккумуляторной батарей (без существенного запаса);
• исключают полное израсходование остаточной емкости аккумуляторной батареи АБ 11 и потерю КА, в результате чего повышается надежность КА.
При этом, используют кратковременную работу блока реактивных двигателей ориентации для которой требуется незначительный (малый по массе) запас рабочего тела.
Известно, что в качестве реактивного двигателя коррекции орбиты для управления движением центра масс (для коррекции движения КА с целью устранения ошибок выведения ракетой-носителем КА на расчетную орбиту и периодической коррекции и поддержания орбиты КА), которые присутствуют в космосе в каждом КА (на фиг. 1 не показаны) требуются более мощные (см. например, патенты, РФ, 2117813, 2568825), чем для блока реактивных двигателей ориентации БРДО 17 (тип и количество реактивных двигателей определяются размерностью космического аппарата), то есть двигателей управления вращательным движением вокруг центра масс (Ю.Г. Гусев, А.В., Пильников. Роль и место электроракетных двигателей в Российской космической программе. Электронный журнал «Труды МАИ». Выпуск №60).
Для выбора динамики и расчета запаса рабочего тела реактивных двигателей ориентации БРДО 17 ниже приведены выражения (3, 4, 5), описывающие общие свойства реактивных двигателей ориентации:
• тяга реактивного двигателя Р

где ms - секундный расход массы,
ω - скорость истечения;
• при рассмотрении не массового, а весового секундного расхода Gs=g⋅ms

где удельный импульс Is=ω/g,
g - ускорение силы тяжести;
• импульс тяги за время Δt равен

где ΔG - весовые затраты за время Δt.
По окончании процесса успокоения и стабилизации КА, в автоматическом режиме по сигналам солнечного датчика СД 8 и центральной ЭВМ 1, поступающими в устройство управления ориентацией солнечных батарей УУО СБ 9, под действием приводных двигателей, находящихся в нем, солнечные батареи СБ 10 устанавливаются в положение относительно корпуса КА 7 для получения максимальной их освещенности (солнечные батареи устанавливаются в положение при котором угол отклонения нормали к активной поверхности батареи от линии направления на Солнце будет минимальным), гарантирующих положительный энергобаланс. Солнечный датчик СД 8 обеспечивает надежность и живучесть КА, т.к. при эксплуатации его в автономном режиме из-за отсутствия информационных показаний положения КА с БЗД 2 может возникнуть длительное произвольное ориентирование положения КА, не позволяющее получать солнечными батареями освещенности от Солнца, приводящей к нарушению положительного энергобаланса.
Следует отметить, что на протяжении всего срока активного существования КА радикальной защитой от аварийной ситуации на КА, связанной с потерей ориентации на Солнце, используют автоматический переход с основного на резервный режим управления ориентацией КА относительно направления на Солнце. Такой режим работы не может обеспечить в полной мере функциональные возможности КА, но он гарантирует положительный энергобаланс, что обеспечивает живучесть КА. Переход на резервный режим управления ориентацией проводят по команде управления (КУ) из наземного комплекса управления по «жесткой» логике, т.е. без использования центральной ЭВМ 1, при воздействиях на КА различных факторов космического пространства, например, локальных статических разрядов, приводящих к сбою в работе центральной ЭВМ 1. Последующее возобновление ориентации КА с использованием Центральной ЭВМ 1 осуществляют по КУ из наземного комплекса управления.
Для обеспечения высокой маневренности КА в качестве исполнительных органов ИО 3 используют блок гиродинов, которые требуют по окончании процесса успокоения и стабилизации КА (в начале обеспечения штатного режима КА) приведение их в рабочее состояние путем плавной раскрутки роторов до заданной номинальной постоянной скорости.
Гиродины обладают двумя степенями свободы относительно корпуса КА. Одна из них связана с вращением маховика (ротора гиродина) с постоянной скоростью вокруг оси (например, в исходном номинальном положении вокруг оси OY), установленного в гироузле (например, в рамке), и создающего вектор кинетического момента Н по данной оси (оси гироскопа, совпадающей с осью ротора), а другая - с поворотом оси вращения ротора гиродина под воздействием некоторого устройства (привода), создающего вращающий момент т, т.е. с поворотом гироузла с угловой скоростью е вокруг оси OZ (оси прецессии), перпендикулярной к первой. В результате через конструкцию крепления гиродина на корпус КА в начальный момент передается управляющий момент М вокруг третьей оси (оси ОХ), равный

(см. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. Ориентация искусственных спутников в гравитационных и магнитных полях. «Наука», М., 1974. стр. 130-131).
В связанной системе координат КА OXsYsZs определяют следующие углы:
• крен - вращение вокруг оси OXs;
• рыскание - вращение вокруг оси OYs;
• тангаж - вращение вокруг оси OZs,
при этом оси орбитальной системы координат OXOYOZO и оси связанной системы координат КА OXsYsZs (начало координат совпадает с центром масс КА; все оси расположены вдоль строительных осей КА) при орбитальной ориентации должны быть совмещены (при орбитальной ориентации размером корпуса можно пренебречь). Управление вращением КА вокруг оси OXs в связанной системе координат принимаем за управление КА по крену и величина управляющего момента гиродина описывается следующим выражением:
где m - величина вращающего момент вокруг оси прецессии (ось OZs),
Н - величина кинетического момента гироскопа (ось OYs),
e - угол отклонения вектора Н от исходного номинального положения,
 - угловая скорость поворота гироузла.
- угловая скорость поворота гироузла.
(см. Петрищев В.Ф. Элементы теории гироскопа и его применение для управления космическими аппаратами: Учебное пособие. Самарский государственный аэрокосмический университет. Самара, 2004. с. 59-61).
Величины управляющих моментов по рысканью и тангажу относительно исходного номинального положения описываются аналогично, выражению (7) управления КА по крену.
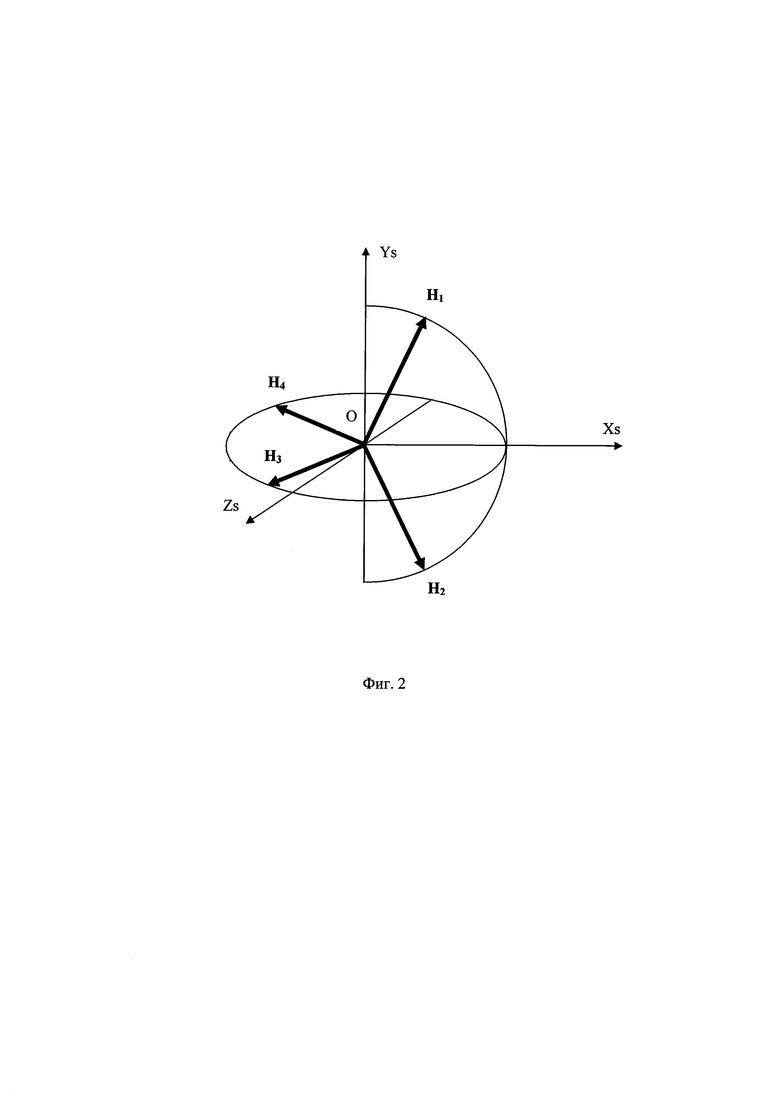
На практике для обеспечения высокой надежности КА в качестве блока гиродинов используют избыточную систему гиродинов, в которой число гиродинов больше трех. При этом наибольший интерес представляют системы из четырех гиродинов, обладающих минимальной избыточностью, т.е. минимальной массой и в то же время сохраняющих работоспособность при отказе одного гиродина, повышая, тем самым, надежность КА. Пример расположения четырех гиродинов минимально избыточной системы в блоке гиродинов в виде графической иллюстрации приведен на фиг. 2.
Данная минимально избыточная система в блоке гиродинов представлена в виде двух типовых групп гиродинов с параллельными осями прецессии, при этом начала всех кинетических моментов гироскопов Hi приведены в общую точку О (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 184-188). Векторы кинетических моментов гироскопов (H1, Н2) первой группы гиродинов вращаются в координатной плоскости OXY, а второй (Н3, Н4) - в координатной плоскости OXZ. В качестве гиродинов можно использовать, например, гиродины СГК-100, СГК-30, выпускаемые предприятием «НИИ командных приборов», Россия, Санкт-Петербург.
В результате длительной плавной раскрутки роторов гиродинов ИО 3 до заданной максимальной постоянной скорости (требуемое время раскрутки, например, у гиродина СГК-100 составляет около 180 мин) изменяются векторы кинетического момента Н по осям роторов, приводящие к возникновению воздействующих на корпус КА управляющих моментов, что приводит к появлению "паразитных" угловых скоростей КА (на практике создать идентичные компенсирующие друг друга управляющих моментов двух гиродинов невозможно).
Длительная плавная раскрутки роторов гиродинов ИО 3 до заданной максимальной постоянной скорости связана с конструктивными особенностями гиродина, у которого массивный ротор раскручивает двигатель с небольшими массой и габаритами, обладающий, в соответствии с этим, небольшим динамическим моментом. Электромагнитная система управления ЭСМУ 12 не может эффективно парировать данные "паразитные" угловые скорости КА и стабилизировать КА, в виду возможной недостаточности создаваемых и постоянно изменяемых в процессе полета КА механических моментов, а также временами их полного отсутствия. Это связано с тем, что в процессе полета КА механический момент, создающийся в результате взаимодействия векторов магнитного момента электромагнитной системы управления и геомагнитного поля Земли изменяется от максимального значения при перпендикулярном их расположении относительно друг друга до нулевого при параллельном их расположении относительно друг друга (см. патент, РФ, №2625687). Нарушение стабилизации КА при использовании только ЭСМУ 12 (как в прототипе) приводит к нарушению ориентации солнечных батарей СБ 10 на Солнце для притока максимальной энергии и, в связи с этим, возможны "сбои" в процессе заряда аккумуляторной батареи АБ 11, а также дополнительный расход ее остаточной емкости для длительного питания ИО 3 (блока гиродинов) и УУО СБ 9, что может приводить к глубокому разряду аккумуляторной батареи АБ 11 и нарушению процесса раскрутки роторов в гиродинах ИО 3. Использование сочетанного включения ЭСМУ 12 и БРДО 17 по сигналам микро ЭВМ 5 в процессе раскрутки роторов в гиродинах ИО 3 до заданной максимальной постоянной скорости позволяет исключить глубокий разряд АБ 11, обеспечить стабилизацию КА и практически полностью исключить "паразитные" угловые скорости КА, а также исключить "сбои" в процессе заряда АБ 11.
Несущественную массу рабочего тела БРДО 17 выбирают исходя из гарантированного обеспечения времени его работы:
• времени работы для успокоения и стабилизации КА;
• времени плавной раскрутки роторов гиродинов в качестве исполнительных органов;
• времени работы для раскрутки роторов гиродинов, возникающих при аварийных ситуациях на КА, например, при сбое в энергоснабжении, приводящей к остановке роторов гиродинов (предусматривают, например, два случая аварийной ситуации в течении всего срока активного существования КА).
Таким образом, в предлагаемом способе управления движением космического аппарата с управляемой ориентацией:
• существенно сокращают время процесса успокоения и стабилизации КА;
• оптимизируют выбор аккумуляторных и солнечных батарей, позволяющий получить высокие удельные энергетические характеристики источника питания КА;
• обеспечивают высокий срок активного существования КА, т.к. длительность работы КА в штатном режиме не связана с расходованием рабочего тела, которое ограничено по массе;
• используют блок реактивных двигателей ориентации, которые не требует большого запаса массы рабочего тела;
• существенно сокращают время до начала ориентации солнечных батарей на Солнце и начала заряда аккумуляторных батарей, что уменьшает глубину их разряда и увеличивает эффективность работы при заходе КА на затененную орбиту;
• сокращают время экономии расхода остаточной емкости аккумуляторных батарей, при котором питают преимущественно электромагнитную систему управления с устройствами, обеспечивающими ее работоспособность, что повышает эффективность работы устройств управления движением КА;
• повышают надежность устройства управления движением КА и исключают возможную потерю КА из-за полного расходования остаточной емкости аккумуляторных батарей;
• эффективно парируют "паразитные" угловые скорости КА при раскрутке роторов гиродинов;
• обеспечивают рациональное электропитание процесса раскрутки роторов гиродинов;
• обеспечивают высокую динамику (использованием гиродинов) и точность ориентации (использованием звездных датчиков) КА.
В предлагаемом способе используют решения, позволяющие обеспечить высокий срок активного существования КА, путем снижения глубоких разрядов и увеличения ресурса работы аккумуляторной батареи, использования в течение всего срока работы КА для управления ориентацией и для сброса кинетического момента электромагнитного устройства управления, которое не требуют рабочего тела, использования необходимых гарантированных несущественных запасов рабочего тела для блока реактивных двигателей ориентации в виду незначительного времени работы (на приведенном примере выбора гиродинов, двух случаев аварийной ситуации, приблизительно не более 10 часов при сроке активного существования КА более 5 лет).
В результате в способе достигают высокую эффективность и надежность управления движением космического аппарата при обеспечении высокоточной динамичной ориентации и высокого срока активного существования КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2621933C2 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| Способ управления ориентацией космического аппарата | 2021 |
|
RU2760818C1 |
| Способ разгрузки инерциальных исполнительных органов космического аппарата и устройство для реализации способа | 2024 |
|
RU2834705C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2736522C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322374C2 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
Изобретение относится к области управления относительным движением космических аппаратов (КА) с солнечными (СБ) и аккумуляторными (АБ) батареями. С помощью СБ обеспечивают положительный энергобаланс источника питания. Ориентируют КА на заданной орбите с использованием бесплатформенного инерциального блока с блоком звездных датчиков. Посредством исполнительных органов в виде гиродинов и электромагнитной системы управления (ЭМСУ) формируют управляющие моменты воздействия на корпус КА. Вместе с ЭМСУ используют блок реактивных двигателей с малым расходом рабочего тела в режимах успокоения и стабилизации КА при хаотично изменяющемся моменте, создаваемом ЭМСУ. Обеспечивают плавную раскрутку роторов гиродинов и доводят величину зарядной емкости АБ до оптимального значения энергообеспечения указанных режимов КА и его длительного штатного режима. Техническим результатом являются высокие эффективность и надежность управления КА при обеспечении его длительной высокоточной ориентации. 2 ил.
Способ управления движением космического аппарата (КА) с управляемой ориентацией, заключающийся в обеспечении солнечными батареями положительного энергобаланса источника питания, содержащего аккумуляторную батарею, в ориентации КА на заданной орбите с использованием бесплатформенного инерциального блока с блоком звездных датчиков, в использовании исполнительных органов (ИО), создающих крутящий момент, и электромагнитной системы управления (ЭМСУ), формирующей механические моменты воздействия на корпус КА для его управления и сброса кинетического момента, отличающийся тем, что на корпусе КА устанавливают блок реактивных двигателей ориентации, включающий в себя силовой блок реактивных двигателей, соединенный с резервуаром, содержащим несущественный, полностью не расходуемый в течение срока активного существования КА запас массы рабочего тела, а также блок управления резервуаром с рабочим телом и силовым блоком реактивных двигателей, воздействуют на корпус КА блоком реактивных двигателей ориентации в сочетании с ЭМСУ при успокоении КА и в режиме его стабилизации при хаотично изменяющемся механическом моменте, создаваемом ЭМСУ, обеспечивают плавную раскрутку роторов ИО, выполненных в виде гиродинов, при этом доводят величину зарядной емкости аккумуляторной батареи источника питания до оптимального значения с учетом достаточного энергообеспечения режимов успокоения, стабилизации и длительного штатного режима КА.
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Б.В | |||
| Раушенбах, Е.Н | |||
| Токарь | |||
| Управление ориентацией космических аппаратов | |||
| "Наука", М., 1974 | |||
| стр | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| US 6921048 B2, 26.07.2005 | |||
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГООБЕСПЕЧЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2293690C2 |
| US 5931421 A, 03.08.1999 | |||
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |

