Изобретение относится к области гидроакустики и может быть использовано при формировании и оценке автомодельного профиля вертикального распределения скорости звука (ВРСЗ) по его измеренному в некотором диапазоне глубин и времени фрагменту, а также в задачах гидроакустических расчетов, а именно при прогнозировании дальности действия гидроакустических комплексов и систем, достоверности гидрологических моделей, повышение точности решения прогнозных задач гидроакустики и т.д.
Профиль ВРСЗ является важным фактором, влияющим на характеристики распространения звука в океане, что делает точное получение ВРСЗ необходимым шагом в исследованиях океанографии и подводной акустики. Прямое измерение ВРСЗ ограничено стоимостью измерений in situ, невозможностью его непосредственного измерения и характеристиками самого прибора, что приводит к отсутствию информации. Между тем сложная и динамичная морская среда, включая океанические явления в различных временных и пространственных масштабах (Chen, С, Yang, К., Duan, R., Ma, Y., 2017. Acoustic propagation analysis with a sound speed feature model in the front area of Kuroshio extension. Appl. Ocean Res. 68, 1-10. https://doi.Org/10.1016/j.apor.2017.08.001; Chen, W., Zhang, Y., Liu, Y., Ma, L., Wang, H., Ren, K., Chen, S., 2022. Parametric model for eddies-induced sound speed anomaly in five active mesoscale eddy regions. J. Geophys. Res. Oceans. 127 (8), e2022JC018408 https://doi.org/10.1029/ 2022JC018408; Duda, T.F., Lavery, A.C., Lin, Y., Zhang, W., 2018. Sound propagation effects of nearseabed internal waves in shallow water. J. Acoust. Soc. Am. 143, 1975. https://doi.org/10.1121/1.503650), постоянно влияют на ВРСЗ, поскольку ВРСЗ зависит от температуры морской воды, солености и давления (глубины) (Lovett, J.R., 1978. Merged seawater sound-speed equations. J. Acoust. Soc. Am. 63, 1713-1718. https://doi.Org/10.1121/l.381909; Medwin, H., 1975. Speed of sound in water: a simple equation for realistic parameters. J. Acoust. Soc. Am. 58, 1318- 1319. https://doi.Org/10.1121/l.380790), SSP может быть измерен непосредственно с помощью профилемера скорости звука SVP (Zhang, С, Wang, D., Liu, Z., Lu, S., Sun, C, Wei, Y., Zhang, M., 2022a. Global gridded Argo dataset based on gradient-dependent optimal interpolation. J. Mar. Sci. Eng. 10 (5), 650. https://doi.org/10.3390/jmsel0050650; Zhang, S., Xu, X., Xu, D., Long, K., Shen, C, Tian, C, 2022b. The design and calibration of a low-cost underwater sound velocity profiler. Front. Mar. Sci. 9, 996299 https:// doi.org/10.3389/fmars.2022.996299) или косвенно рассчитан на основе параметров морской воды, измеренных CTD (проводимость, температура и глубина) (Grekov, A.N., Grekov, N.A., Sychov, Е., 2021. Estimating quality of indirect measurements of sea water sound velocity by CTD data. Measurement 175, 109073. https://doi.org/l0.1016/i.measurement.2021.109073) или расходуемая проводимость, температура и глубина (XCTD) (Alb'erola, С, Millot, С, Send, U., Mertens, С, Fuda, J., 1996. Comparison of XCTD/CTD data. DEEP-SEA RES PT I. 43 (6), 859-876. https://doi.org/10.1016/0967-0637(96) 00031-3; Kizu, S., Onishi, H., Suga, Т., Hanawa, K., Watanabe, Т., Iwamiya, H., 2008. Evaluation of the fall rates of the present and developmental XCTDs. DEEP-SEA RES PT I. 55 (4), 571-586. https://doi.Org/10.1016/j.dsr.2007.12.011), в сочетании с эмпирической формулой скорости звука (Grosso, V.A., Mader, C.W., 1973. Another search for anomalies in the temperature dependence of the speed of sound in pure water. J. Acoust. Soc. Am. 53, 561-563. https://doi.Org/10.1121/l.1913358; Wilson, W.D., 1959. Speed of sound in distilled water as a function of temperature and pressure. J. Acoust. Soc. Am. 31, 1067-1072. https://doi.Org/10.l 121/1.1907828). Однако этот метод обычно требует длительного времени, а также является дорогостоящим при измерениях на больших полигонах. По мере постоянного пополнения различных типов данных наблюдений за океаном появилось множество косвенных методов оценки ВРСЗ, восполняющих пробел прямого измерения ВРСЗ. Один из способов предлагается в данном изобретении.
Известен способ экстраполяции профиля ВРСЗ, описанный в статье (R. Hare, ʺError Budget Analysis for US Naval Oceanographic Office (NAV-OCEANO) Hydro-graphic Survey Systemsʺ, HSRC, University of Southern Mississippi, Hattiesburg, USA, September 2001). Предложенный в статье способ заключается в том, что неизвестная часть профиля скорости звука независимо от того, лежит она выше или ниже измеренной области, достраивается с использованием экстраполяции нулевого либо первого порядка на основе соответствующих крайних точек измеренной части профиля ВРСЗ в предположении детерминированности данных.
Однако данный способ имеет недостатки. К первому из них относится использование детерминированного метода экстраполяции, не учитывающего особенностей измерения профиля скорости звука. Действительно, отсутствие учета среднеквадратичных отклонений (СКО) данных измерений снижает достоверность экстраполяции данных. Ко второму недостатку способа относится неполное использование всей имеющейся априорной информации. В частности, имеющиеся базы данных, таблицы и другие источники информации, описывающие многолетние всесезонные наблюдения профилей ВРСЗ, а также сопутствующих величин, параметров измерителей и т.п. не используются. Таким образом, накопленные статистические данные не оказывают влияния на модель экстраполяции.
Известен способ достроения измеренной части профиля ВРСЗ в воде до поверхности и до дна (Патент на изобретение № 2618599, G01S 15/00 / Микушин И.И. Опубл. 04.05.2017). Достроение полного профиля ВРСЗ осуществляется на основе текущего замера ВРСЗ с привлечением априорной информации из базы данных многолетних измерений ВРСЗ, представленной в статистической форме. Для измеренного фрагмента ВРСЗ находится максимально правдоподобное априорное ВРСЗ из базы данных, после чего происходит достраивание точек ВРСЗ для глубин, лежащих выше и ниже границ замера ВРСЗ. При этом производится коррекция априорного профиля с учетом текущей глубины района плавания и, в случае необходимости, линейная интерполяция реперных точек на интересующие глубины. Недостатком способа является низкая точность получаемого полного профиля ВРСЗ относительно фактического, обусловленная использованием для дальнейшей обработки измеренного фрагмента скорости звука только одного «максимально правдоподобного» профиля ВРСЗ из всего многообразия, имеющихся в базе данных статистических измерений, атласах и других источниках информации, описывающих климатические наблюдения гидрологических характеристик морей и океанов за большой промежуток времени. При этом функция правдоподобия основана на сравнении части единичного профиля ВРСЗ из базы данных многолетних измерений и измеренного участка фрагмента ВРСЗ, распространена на полный профиль ВРСЗ и не учитывает характерные особенности приводного и придонного слоя в данном районе моря для конкретного сезона.
Известен способ достроения измеренной от поверхности моря части профиля ВРСЗ до дна (RU 2769550; 04.04.2022; Бюл. № 10). Сущность способа достроения измеренной от поверхности моря части профиля ВРСЗ до дна, заключающийся в измерении судовой аппаратурой фрагмента кривой ВРСЗ, выборе из климатической базы данных для конкретного морского района и сезона года набора градиентов скорости звука для типовых слоев толщи морской воды и типовой кривой ВРСЗ в придонном слое, последовательном достраивании последней измеренной по глубине точки скорости звука с первой точкой скорости звука типовой кривой, расположенной на горизонте сопряжения, с учетом характерной градиентной структуры водной среды, отличающийся тем, что в достроении используют минимальную по глубине измеренную часть ВРСЗ или скорость звука на поверхности моря, а также климатическую базу данных, описывающую градиенты скорости звука по типовым слоям и типовую кривую ВРСЗ в придонном слое.
При этом следует отметить, что основным недостатком способов достраивания ВРСЗ, базирующихся исключительно на использовании априорных моделей, является отсутствие учета текущих погодных и гидрофизических условий, также влияющих на текущее ВРСЗ, в результате чего получаемый результат является усреднением по сезону
Наиболее близким по технической сущности является способ оценки полного профиля ВРСЗ (RU 2 498 354 / Машошин А.И., Соловьева О.Б., Шафранюк А.В. Опубл. 10.11.2013).
В способе оценки полного профиля ВРСЗ, состоящего в измерении в ограниченном диапазоне глубин скоростей звука в виде набора реперных точек, представляющих собой измеренный профиль ВРСЗ, производится определение географических координат текущего положения носителя, и находятся ранее измеренные, соответствующие этим координатам априорные профили ВРСЗ.
Недостатком способа RU 2 498 354 является то, что для географических координат текущего положения носителя необходимо знать априорные профили ВРСЗ и использование статистических (априорных) данных многолетних измерений ВРСЗ в различных районах Мирового океана в различные сезоны года. В некоторых случаях невозможно описать набором реперных точек профили ВРСЗ из-за отсутствия априорной информации о вертикальных профилях и их изменчивости для некоторых районов океанов и морей.
Задачей изобретения является повышение достоверности автомодельного определения и сравнительной оценки профиля ВРСЗ, состоящей в измерении эталонного профиля, полученного путем зондирования точечным датчиком скорости звука в пределах слоя, находящегося между поверхностью океана и пассивным отражателем, расположенным на определенной глубине. По показаниям точечного датчика скорости звука рассчитываем среднюю скорость звука в пределах измеряемого слоя. Используя значения эталонного профиля, полученного с высоким разрешением, и среднюю величину скорости звука и скорость звука на поверхности океана, определяем безразмерный профиль скорости звука в пределах измеряемого слоя. Затем через определенный промежуток времени измеряем, например, эхолотом среднюю скорость звука и скорость звука на поверхности. Используя безразмерный профиль и автомодельность океана с учетом вновь измеренных средней скорости звука и скорости звука на поверхности, определяем новые автомодельные профили, соответствующие новому времени и пространству. Оценка автомодельного профиля скорости звука определяется по относительной ошибке между эталонным и автомодельным. Усредняя относительную ошибку по всему слою, находим среднее отклонение между эталонным и автомодельным. Величина среднего отклонения задается исследователем для получения автомодельных профилей на морском полигоне.
Предложенный способ автомодельного определения и сравнительной оценки профиля ВРСЗ позволяет добиться повышения:
1) адекватности оценки полного профиля ВРСЗ;
2) достоверности гидрологических моделей за счет использования автомодельных ВСРЗ на полигонах и получения лучшего результата с меньшими усилиями, что означает меньший расход топлива, более высокую эффективность работы, больше данных исследований;
3) точности решения прогнозных задач гидроакустики (расчет дальности действия гидроакустических систем, расчет оптимальной мощности излучения сонаров и т.п.).
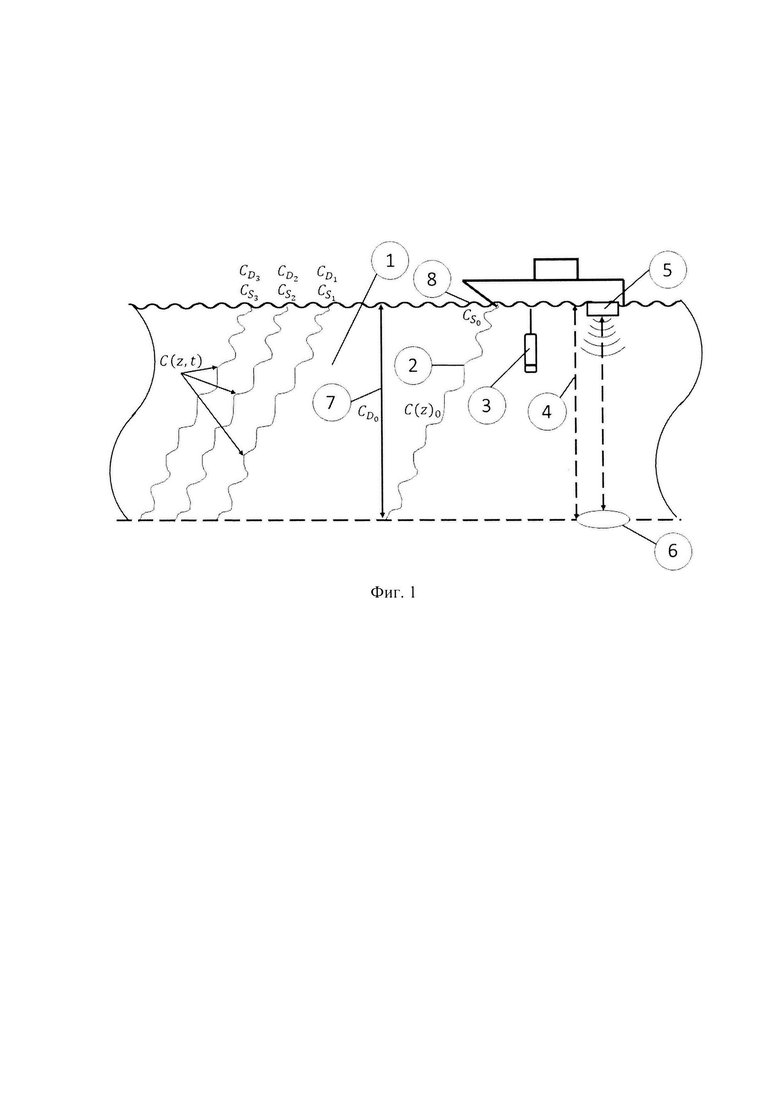
Сущность предлагаемого изобретения поясняет фиг. 1. В районе морской акватории (1) производится измерение ВРСЗ эталонного профиля C(z)0 (2) путем зондирования точечным датчиком скорости звука (3) в пределах слоя глубиной D (4). Далее определяем среднюю скорость звука CD(t) по разности времени между зондируемым импульсом, посылаемым от совмещенного акустического излучателя-приемника (5), и временем прихода измеряемого отраженного импульса от пассивного отражателя (6), расположенного на глубине D. Используя значения эталонного профиля, полученного с высоким разрешением C(z)0, среднюю величину скорости звука  (7) и скорость звука на поверхности
(7) и скорость звука на поверхности  (8), измеренных в точке расположения эталонного профиля, определяем безразмерный профиль скорости звука Q (z) в пределах глубины D.
(8), измеренных в точке расположения эталонного профиля, определяем безразмерный профиль скорости звука Q (z) в пределах глубины D.
Затем, используя безразмерный профиль Q(z) и автомодельность океана, определяем по средней скорости CD(t) и скорости звука на поверхности CS(t), полученные с эхолота новые автомодельные профили C(z, t). Для временного интервала t≥0 автомодельный профиль C(z, t) определится как:
C(z, t)=Q(z)- CS(t) -Q(z)- CD(t)+CD(t),
где безразмерный профиль равен  при t=0.
при t=0.
Оценка автомодельного профиля скорости звука определяется по относительной ошибке с усреднением W по всему слою D
где E(z) - относительная ошибка между C(z)0 и автомодельным C(z, t)
Величина W задается исследователем при получении автомодельных профилей на морском полигоне.
Для подтверждения работы предлагаемого способа на морском полигоне, где проводилась суточная станция с координатами
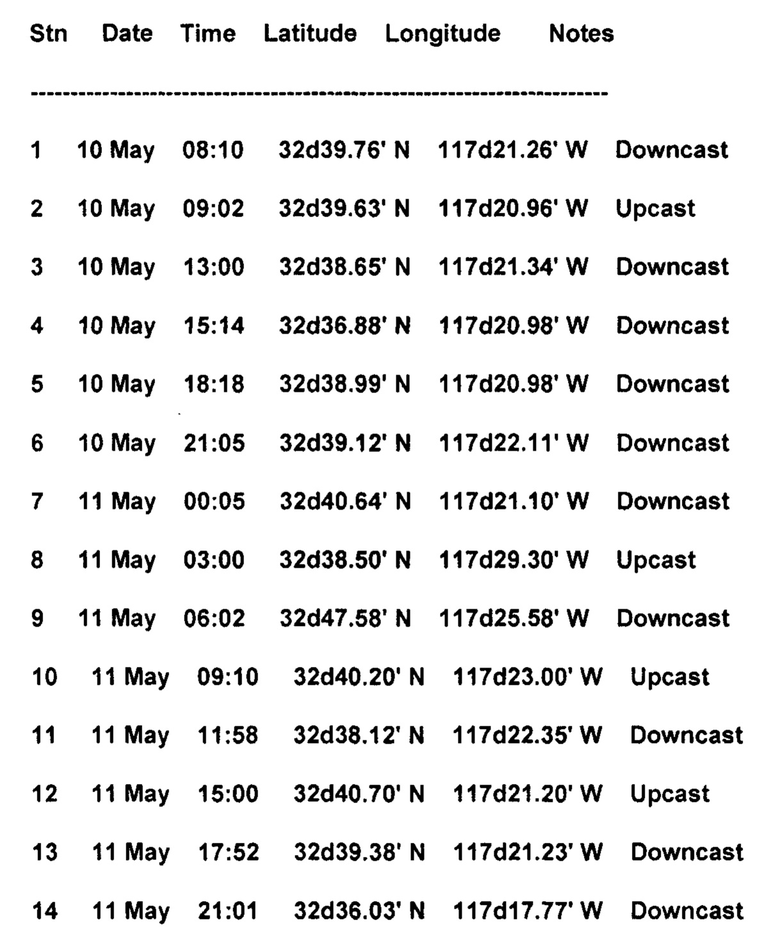
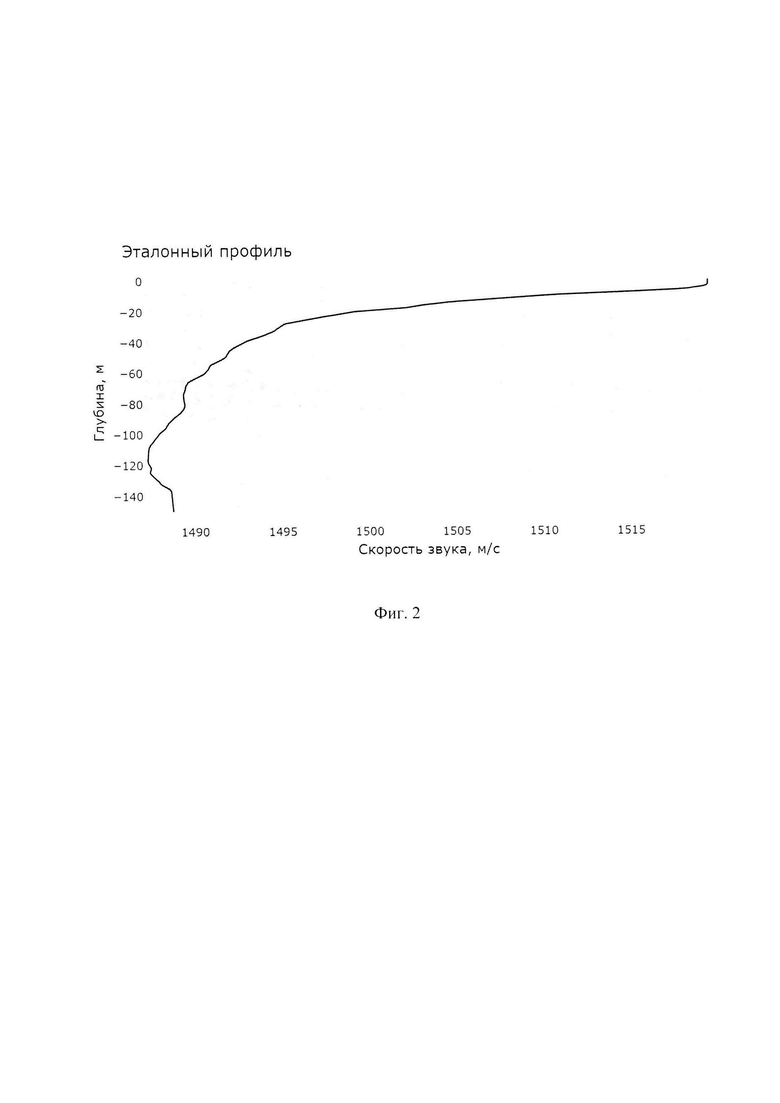
на протяжении всего времени с 10 Мая 08:10 по 11 Мая 21:01 производились зондирования точечным датчиком скорости звука. Вначале для первого зондирования назначался эталонный профиль C(z)0. В дальнейшем вместо эхолота, по показаниям которого можно определить среднюю скорость звука CD(t) и скорость звука на поверхности CS(t), использовались данные, полученные в результате зондирования точечным датчиком скорости звука в пределах слоя D. В эксперименте замена данных, полученных между двумя приборами (эхолота и точечного датчика скорости звука), эквивалентна, но значительно упрощает условия эксперимента, в частности, нет необходимости использовать эхолот для подтверждения работы автомодельности. Для наглядности на фиг. 2 представлен измеренный эталонный профиль C(z)0, где ось X - изменение скорости звука м/с, ось У - ордината глубины z в метрах. Как видно из графика абсолютное изменение скорости звука составляет порядка 35 м/с. Известно, что средним значением поля скорости звука в океане принято считать равным 1500 м/с, и диапазон изменения - 1400…1600 м/с, следовательно, абсолютное изменение скорости звука для всего Мирового океана составляет порядка 200 м/с.
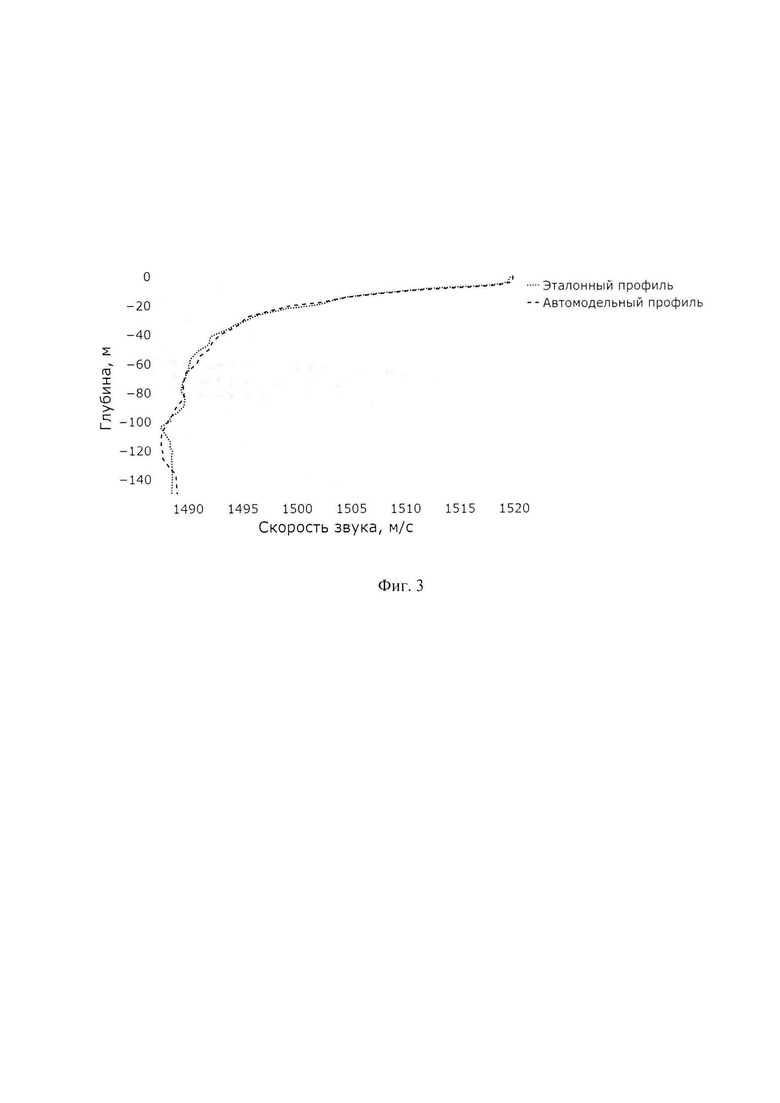
На фиг. 3 показано совместное распределение скорости звука, где а) - эталонного профиля C(z)0 и в) - автомодельного профиля C(z, t).
Для оценки автомодельных профилей скорости звука были проведены вычисления для всего временного ряда C(z,t) с усреднением по всему слою D относительно эталонного профиля C(z)0.
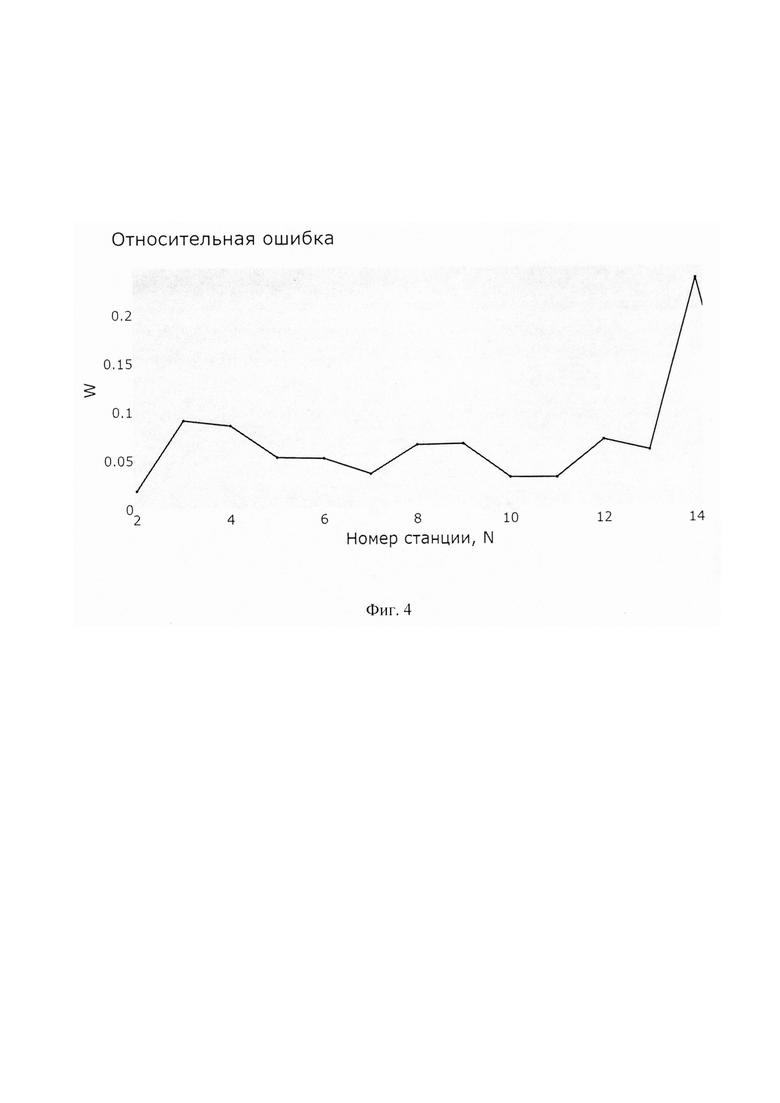
По оси X указано количество станций N, по оси У отображена величина W, которая выбирается из соображений минимума неувязки между значениями распределения скоростей звука эталонного C(z)0 и автомодельных профилей C(z, t). Как следует из графика фиг. 4, лучшие результаты показывают первые 12 автомодельных профилей, затем происходит резкий скачок величины W, что характеризует ухудшения относительных характеристик автомодельных профилей. Затем исследователь определяет: или продолжить получения автомодельных профилей, или провести зондирование точечным датчиком скорости звука в пределах слоя глубиной D для получения нового эталонного профиля.
Технический результат: повышение достоверности гидрологических моделей, точности решения задач гидроакустики за счет использования автомодельного ВРСЗ.
Изобретение относится к области гидроакустики. Способ измерения профиля вертикального распределения скорости звука заключается в измерении эталонного профиля C(z)0, полученного путем зондирования точечным датчиком скорости звука до глубины D, определении средней скорости звука CD(t) по разности времени между зондируемым импульсом, посылаемым излучателем и временем прихода отраженного импульса от пассивного отражателя, и, используя значения эталонного профиля C(z)0, среднюю величину скорости звука  и скорость звука на поверхности
и скорость звука на поверхности  определяют безразмерный профиль скорости звука Q(z) в пределах глубины D, затем, используя безразмерный профиль Q(z) и автомодельность океана, определяют по средней скорости CD(t) и скорости звука на поверхности CS(t) автомодельные профили C(z, t)=Q(z)⋅CS(t)-Q(z)⋅CD{t)+CD(t),
определяют безразмерный профиль скорости звука Q(z) в пределах глубины D, затем, используя безразмерный профиль Q(z) и автомодельность океана, определяют по средней скорости CD(t) и скорости звука на поверхности CS(t) автомодельные профили C(z, t)=Q(z)⋅CS(t)-Q(z)⋅CD{t)+CD(t),
где безразмерный профиль  при t=0. Технический результат: повышение достоверности гидрологических моделей, точности решения задач гидроакустики за счет использования автомодельного ВРСЗ. 4 ил., 1 табл.
при t=0. Технический результат: повышение достоверности гидрологических моделей, точности решения задач гидроакустики за счет использования автомодельного ВРСЗ. 4 ил., 1 табл. 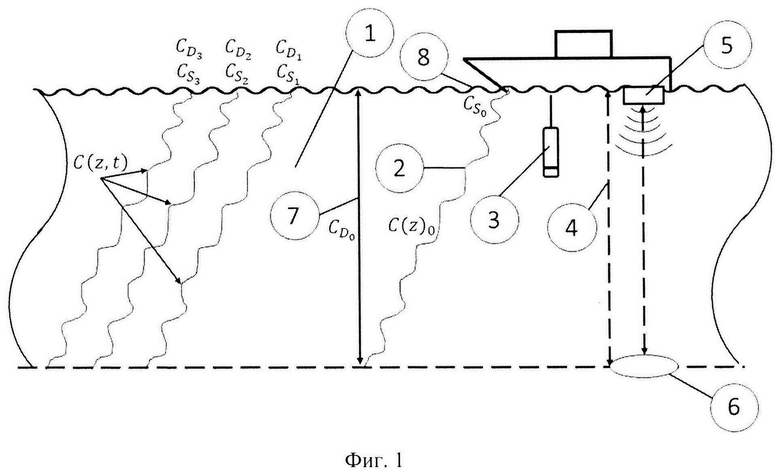
Способ автомодельного определения и сравнительной оценки профиля вертикального распределения скорости звука (ВРСЗ), состоящий в измерении эталонного профиля C(z)0, полученного путем зондирования точечным датчиком скорости звука в пределах слоя глубиной D, отличающийся тем, что определяют среднюю скорость звука CD(t) по разности времени между зондируемым импульсом, посылаемым от совмещенного акустического излучателя-приемника, и временем прихода отраженного импульса от пассивного отражателя, расположенного на глубине D, и, используя значения эталонного профиля, полученного с высоким разрешением C(z)0, среднюю величину скорости звука  и скорость звука на поверхности
и скорость звука на поверхности  определяют безразмерный профиль скорости звука Q (z) в пределах глубины D, затем, используя безразмерный профиль Q(z) и автомодельность океана, определяют по средней скорости CD(t) и скорости звука на поверхности CS(t) новые автомодельные профили C(z, t), для временного интервала t≥0 автомодельный профиль C(z, t) определяют как:
определяют безразмерный профиль скорости звука Q (z) в пределах глубины D, затем, используя безразмерный профиль Q(z) и автомодельность океана, определяют по средней скорости CD(t) и скорости звука на поверхности CS(t) новые автомодельные профили C(z, t), для временного интервала t≥0 автомодельный профиль C(z, t) определяют как:
C(z, t)=Q(z)⋅CS(t) - Q(z)⋅CD(t)+CD(t),
где безразмерный профиль равен  при t=0,
при t=0,
оценку автомодельного профиля скорости звука определяют по относительной ошибке с усреднением W по всему слою D
где E(z) - относительная ошибка между C(z)0 и автомодельным C(z, t) 
величину W задают при получении автомодельных профилей на морском полигоне.
| СПОСОБ ОЦЕНКИ ПОЛНОГО ПРОФИЛЯ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2012 |
|
RU2498354C1 |
| Греков А.Н., Восстановление вертикального профиля скорости звука по данным, полученным точечными и распределенными измерителям // Моря России: современные методы исследований и их практические применения: Тезисы докладов VIII Всероссийской научной конференции, Федеральный исследовательский центр "Морской гидрофизический | |||

